Изобретение относится к ортопедическому гидравлическому амортизатору и ортопедическому вспомогательному средству с таким амортизатором, который предназначен для применения в протезе или ортезе, содержит выполненную в цилиндрическом корпусе вытеснительную камеру, установленный в вытеснительной камере поршень, резервуар для текучей среды, возвратный трубопровод, который соединяет вытеснительную камеру с резервуаром для текучей среды, и клапан, который может принимать положение открывания и положение закрывания, в котором он, по меньшей мере, частично закрывает возвратный трубопровод. Согласно другому аспекту, изобретение относится к способу управления ортопедическим вспомогательным средством.
Ортопедические гидравлические амортизаторы используются в ортопедических вспомогательных средствах, таких, например, как протезы или ортезы. Они служат в качестве элемента сопротивления между двумя плечами. Например, ортопедический гидравлический амортизатор расположен между бедром и голенью ножного протеза и повышает сопротивление сгибанию коленного сустава ножного протеза.
Ножные протезы с такими ортопедическими гидравлическими амортизаторами редко применяются для гериатрических пациентов. Для пациентов пожилого возраста, которые сильно ограничены в своих мускульных и двигательных функциональных способностях, часто используются коленные суставы с замком.
Известные коленные суставы с замком для гериатрических ножных протезов обеспечивают для гериатрических пациентов по соображениям стоимости лишь два состояния, блокированное и деблокированное. С блокированным с помощью запорного механизма коленным суставом с замком гериатрический пациент предпочтительно ходит. Известные ортопедические шарниры с замком имеют тот недостаток, что они приводят к тому, что походка пациента кажется прихрамывающей, поскольку он переносит ногу вперед с наружным поворотом (круговым движением) или же посредством постановки ноги на пальцы или посредством наклонной постановки бедра удлиняет здоровую ногу для обеспечения свободного прохода ножного протеза. Для того чтобы сесть, гериатрический пациент вручную деблокирует замок. В этом состоянии ножной протез не оказывает сопротивления сгибанию и тем самым не обеспечивает безопасности, что является недостатком. В этой ситуации пациент должен опираться на что-то обеими руками. Если же гериатрический пациент с деблокированным ножным протезом спотыкается, то он непроизвольно падает. Поэтому известные ортопедические вспомогательные средства, которые снабжены обычными ортопедическими замками, мало популярны среди гериатрических пациентов.
Из ЕР 0309441 известен гидравлический цилиндропоршневой блок двойного действия, с помощью которого сохраняются наружные размеры сильфона заданной формы, при этом сильфон окружает большую часть цилиндропоршневого блока. Недостатком этого цилиндропоршневого блока является сложность его изготовления.
Из DE 10214357 А1 известен протез коленного сустава с гидравлическим демпфирующим цилиндром. В этом протезе коленного сустава имеется гидравлическая жидкость, вязкость которой можно изменять с помощью внешнего силового поля. Недостатком этого варианта выполнения является то, что хотя он обеспечивает повышенную комфортность при хождении, однако требует наличия электрического управления, что неприемлемо для дешевых протезов.
Из DE 19859931 А1 известен ножной протез, который в большей или меньшей степени демпфируется с помощью изменяющей свою вязкость под действием внешних электрических полей гидравлической жидкости. Недостатком является необходимость управления.
В основу изобретения положена задача создания ортопедического гидравлического амортизатора, предназначенного для изготовления ортопедических вспомогательных средств, которые более пригодны для гериатрических пациентов.
Задача решена согласно изобретению с помощью ортопедического вспомогательного средства с признаками главного независимого пункта формулы изобретения, которое содержит ортопедический гидравлический амортизатор согласно изобретению и шарнир, который имеет первое плечо и второе плечо, причем первое плечо соединено с цилиндрическим корпусом, а второе плечо - с поршнем гидравлического амортизатора, и имеет устройство, которое измеряет действующую на шарнир силу для приведения клапана в закрытое состояние, если превышается пороговое значение. Согласно второму аспекту задача решена согласно изобретению с помощью способа управления ортопедическим вспомогательным средством согласно изобретению, включающего стадии (а) измерения действующей на шарнир или протез силы (силы, действующей в шарнире) и (б) управления клапаном так, что он, по меньшей мере, частично закрывает возвратный трубопровод. Согласно третьему аспекту задача решена согласно изобретению с помощью ортопедического гидравлического амортизатора, в котором поршень установлен в вытеснительной камере, по меньшей мере, при одной глубине вдвигания с образованием кольцевого зазора, в частности, определяющего прохождение потока кольцевого зазора.
Ортопедическое вспомогательное средство предпочтительно содержит устройство для измерения действующей на протез нагрузки, которое предназначено для приведения клапана в закрытое положение, если сила, действующая на шарнир, превышает предварительно установленное пороговое значение. Это устройство может быть, например, датчиком, который измеряет силу или крутящий момент. Однако устройство может быть также образовано с помощью чисто механического соединения.
Ортопедическое вспомогательное средство предпочтительно является ножным протезом с коленным суставом и устройством для измерения действующей на протез нагрузки. Это устройство содержит датчик действующей по оси ноги силы, который измеряет силу, действующую в продольном направлении распрямленного ножного протеза вдоль оси протеза.
Для обеспечения возможности определения действующей по оси ноги силы особенно точно и деликатно, предпочтительно в передней части стопы ножного протеза расположен датчик силы, действующей в передней части стопы, и/или в задней части стопы расположен датчик силы, действующей в задней части стопы. Они находятся в электрическом соединении с электрическим управляющим устройством, которое управляет клапаном в зависимости от электрических сигналов, которые оно получает от датчика, соответственно, датчиков.
Датчик силы, действующей вдоль оси ноги, может быть выполнен в качестве несущего элемента протеза, который, например, изменяет свой продольный размер в зависимости от нагрузки ножного протеза. В качестве альтернативного решения, датчик нагрузки ноги может содержать тензометрический датчик.
Альтернативно электронному измерению, оценке и приведению в действие предусмотрено, что устройство для измерения силы, действующей на шарнир, выполнено механическим и клапан при нагрузке смещается в положение закрывания. Механическое управление может осуществляться, например, посредством относительного перемещения плеч относительно друг друга, за счет использования поворота или смещения в осевом направлении плеч относительно друг друга и передачи возникающих сил, по меньшей мере, частично на клапан для его перемещения. Для этого устройство для измерения силы, действующей на шарнир, может быть выполнено в виде пружины с изгибом по продольной оси, пружинной пластинки, кулачковой направляющей или в виде рычажной системы, с помощью которых можно передавать силы перемещения на клапан. Предпочтительно, устройство соединено с магнитным клапаном, который предварительно напряжен в направлении положения закрывания, так что при удалении включающего магнита клапан автоматически закрывается. За счет этого обеспечивается, что при выходе из строя механики резко увеличивается демпфирование, за счет чего обеспечивается устойчивость шарнира.
Включающее движение может осуществляться за счет того, что при достаточно большой осевой составляющей силы плечи сдвигаются друг к другу. Для этого оба плеча опираются друг на друга с возможностью ограниченного сдвига относительно друг друга, за счет чего при механическом переключении непосредственно приводится в действие клапан, в то время как при переключении с помощью датчиков путь сдвига измеряется в качестве подлежащей измерению величины, с помощью которой инициируется исполнительный сигнал. Сдвиг показывает осевую нагрузку, например, когда пользователь протеза стоит, так что может осуществляться защита фазы стояния за счет увеличения демпфирования. Может быть предусмотрена противодействующая движению сдвига, действующая в осевом направлении пружина, которая компенсирует допуски и вызывает возвратное движение в исходное состояние.
В одной модификации изобретения предусмотрено, что амортизатор и шарнир установлены вместе на раме или же образуют раму, которая предназначена для перемещения, в частности сдвига, относительно одного из плеч. Между рамой и одним из плеч может быть расположена пружина, которая противодействует перемещению плеча к раме. Гидравлический амортизатор может быть выполнен в виде амортизатора простого или двойного действия, в виде цилиндрического амортизатора или в виде поворотного гидравлического амортизатора.
Наряду с зависящим от осевой силы управлением, может быть дополнительно предусмотрено, что устройство выполнено так, что происходит зависящее от угла φ поворота перемещение включающего элемента относительно клапана, предпочтительно, но не исключительно, за счет механической связи.
В рамках способа, согласно изобретению, клапаном предпочтительно управляют так, что он, по меньшей мере, частично закрывает возвратный трубопровод, когда сила в направлении оси ноги превышает предварительно установленное пороговое значение закрывания. Для этого возможно, но не обязательно, пороговое значение вводят, например, в электрическое управляющее устройство. Возможно также, что степень закрывания клапана монотонным, соответственно, постоянным образом зависит от силы в направлении оси ноги, т.е. что клапан закрывается тем больше, чем больше действующая в направлении оси ноги сила.
Кроме того, в одном варианте выполнения изобретения предусмотрено, что клапан переключается независимо от положения плеч, т.е. имеет значение не то, как плечи расположены относительно друг друга или в пространстве, а лишь то, имеется ли достаточно большая осевая составляющая силы. Возникают ли еще в ортопедическом вспомогательном средстве изгибные моменты, моменты кручения или горизонтальные силы, не имеет значения.
В другом варианте выполнения предусмотрено, что клапан переключается в зависимости от угла φ между плечами, например при угле наклона друг к другу между 20° и 50°. Если при использовании ножного протеза достигается определенный заданный угол наклона, то автоматически увеличивается демпфирование для обеспечения фиксации шарнира. При этом демпфирование можно устанавливать так, что остается возможным медленное опускание. Переключение клапана вследствие сдвига или поворота плеч относительно друг друга осуществляется, например, механически посредством передачи относительного перемещения плеч относительно друг друга на клапан.
Преимуществом гидравлического амортизатора согласно изобретению является то, что он позволяет изготавливать ортопедическое вспомогательное средство, которое отвечает потребностям гериатрических пациентов. При нагрузке протеза, в распоряжении пациента имеется большое демпфирование, которое предотвращает неожиданное подкашивание и обеспечивает безопасную ходьбу. Под действием нагрузки поршень медленно вытесняет текучую среду через кольцевой зазор из вытеснительной камеры в не находящийся под давлением резервуар для текучей среды. Пациент медленно опускается в коленном суставе и имеет постоянно ощущение опоры на ножной протез. Кроме того, отпадает необходимость деблокирования гидравлического амортизатора.
Если же в противоположность этому к коленному суставу не прикладывается нагрузка, соответственно, сила сгибания, то клапан переводится в открытое положение и нога качается без сопротивления. Тем самым отпадает необходимость наружного поворота ножного протеза при его проведении вперед или же удлинения здоровой ноги за счет ее постановки на носок. За счет этого походка кажется более естественной.
Другим преимуществом является то, что ортопедический гидравлический амортизатор можно изготавливать с помощью простых технических средств. В обычных гидравлических амортизаторах должно обеспечиваться хорошее уплотнение между поршнем и вытеснительной камерой. Такое уплотнение является сложным и дорогостоящим. Поскольку согласно изобретению предусмотрен кольцевой зазор, то при изготовлении поршня могут быть предусмотрены значительно большие допуски, что облегчает и удешевляет изготовление.
Кроме того, вследствие больших допустимых допусков обеспечивается возможность применения для изготовления корпуса цилиндра и/или поршня более дешевых материалов, таких как, например, пластмасса, которые имеют небольшой модуль упругости. В обычных гидравлических амортизаторах необходимо также при механической нагрузке обеспечивать уплотнение между поршнем и вытеснительной камерой. Для предотвращения возникновения нарушающего уплотнение зазора при механической нагрузке, необходимо применять материалы с высоким модулем упругости, такие как, например, металлы. Эта необходимость отпадает в гидравлическом амортизаторе согласно изобретению.
Под кольцевым зазором в рамках данного описания понимается, в частности, промежуточное пространство между внутренней стороной вытеснительной камеры и наружной стороной поршня. Этот кольцевой зазор может, но не обязательно, иметь круговое поперечное сечение. Возможно, что поршень на некоторых участках прилегает к внутренней стенке и поперечное сечение кольцевого зазора имеет форму полумесяца. Возможно также, что поршень прилегает к внутренней стенке в широких зонах и имеет продольные канавки, через которые текучая среда может попадать из вытеснительной камеры в резервуар для текучей среды. В отличие от известных гидравлических амортизаторов, в которых кольцевые зазоры могут возникать лишь вследствие технологических допусков, поршень в гидравлическом амортизаторе согласно изобретению выполнен так, что он образует кольцевой зазор с предварительно заданной площадью поперечного сечения, соответственно, текучая среда преодолевает предварительно заданное сопротивление, когда она протекает через кольцевой зазор. Другими словами, поршень и корпус цилиндра образуют в известных гидравлических амортизаторах уплотнительную посадку, в то время как в гидравлическом амортизаторе согласно изобретению можно образовывать более свободную посадку с зазором. Поэтому в известных гидравлических амортизаторах возникают потоки утечки, а не заданные демпфирующие потоки текучей среды, как в гидравлическом амортизаторе согласно изобретению.
Возможно, но не обязательно, что поршень и корпус цилиндра образуют во всех поперечных сечениях перпендикулярно продольной оси поршня кольцевой зазор с одинаковой площадью поперечного сечения.
В одном предпочтительном варианте выполнения клапан приводит к демпфированию движения поршня в вытеснительной камере, при этом демпфирование действует лишь в одном направлении движения поршня, например в направлении вдвигания поршня в корпус цилиндра. При использовании в ортопедическом вспомогательном средстве регулярно необходимо, но также достаточно демпфировать движение двух плеч шарнира вспомогательного средства в направлении вдвигания. Если ортопедический гидравлический амортизатор установлен в ножном протезе, то это направление является направлением сгибания (сгибательным направлением). Для реализации этого признака клапан может быть, например, обратным клапаном, который является простым и дешевым.
Текучая среда при протекании вдоль пути прохождения текучей среды из вытеснительной камеры через кольцевой зазор в резервуар для текучей среды испытывает сопротивление кольцевого зазора, а при течении вдоль пути прохождения из вытеснительной камеры через возвратный трубопровод в резервуар для текучей среды встречает сопротивление возвратного трубопровода. Предпочтительно предусмотрено, что кольцевой зазор имеет форму и/или площадь поперечного сечения, которая выбрана настолько большой, что при нахождении клапана в закрытом положении сопротивление кольцевого зазора для текучей среды меньше сопротивления возвратного трубопровода для текучей среды. То есть при закрытом клапане при вдвигании поршня в вытеснительную камеру через кольцевой зазор попадает в резервуар больше текучей среды, чем через возвратный трубопровод.
Особенно предпочтительно, если клапан и кольцевой зазор выполнены так, что когда клапан находится в закрытом положении, а поршень вдвинут в вытеснительную камеру, то по существу вся текучая среда вытекает из вытеснительной камеры через кольцевой зазор в резервуар для текучей среды. Под признаком вытекания указанным образом по существу всей текучей среды следует понимать, что нет необходимости протекания в строгом смысле всей текучей среды через кольцевой зазор. Возможно также, что небольшой частичный поток все еще протекает через клапан. Этот частичный поток, например, меньше 15% всего потока.
Особенно предпочтительно, текучая среда является гидравлической жидкостью. Эта гидравлическая жидкость может быть маслом, например минеральным маслом, но также, например, водой. В принципе возможно также применение воздуха.
Целесообразно, если вязкость гидравлической жидкости не зависит от магнитных полей и/или электрических полей. Под этим необходимо понимать, что вязкость изменяется, в частности, менее чем на 50%, когда прикладывается магнитное поле силой 0,1 Тл. В частности, гидравлическая жидкость не содержит магнитных частиц. Такие гидравлические жидкости являются особенно дешевыми.
Особенно простой и экономичный гидравлический амортизатор получают в том случае, если корпус цилиндра и/или поршень выполнены из пластмассы, в частности, отлиты под давлением. В другом предпочтительном варианте выполнения предусмотрен корпус цилиндра из залитой, соответственно, заделанной в пластмассу металлической гильзы. При этом металлическая гильза образует цилиндр. Эта комбинация уменьшает деформацию цилиндра при нагрузке. Для альтернативного предотвращения деформации цилиндра, корпус цилиндра может быть окружен снаружи волокнистым композитным материалом. За счет этого обеспечивается возможность предпочтительного и дешевого массового производства простых ортопедических вспомогательных средств, которые делают их доступными также в странах с низким уровнем жизни.
При использовании поршень гидравлического амортизатора регулярно вдвигается в вытеснительную камеру и выдвигается из нее. Другими словами, постоянно изменяется глубина вдвигания поршня, т.е. длина участка, на который поршень вдвинут в вытеснительную камеру. Предпочтительно, демпфирование, которое гидравлический амортизатор оказывает дальнейшему вдвиганию поршня в вытеснительную камеру, можно изменять за счет того, что поршень имеет коническую форму. Например, поршень может конически сужаться, при этом площадь поперечного сечения поршня, например, увеличивается при увеличении глубины вдвигания. В этом случае увеличивается сопротивление, которое создает гидравлический амортизатор дальнейшему вдвиганию поршня в вытеснительную камеру, при увеличении глубины вдвигания. При установке в ножном протезе это означает, что сгибание коленного сустава особенно сильно демпфируется к концу усаживания пациента.
Кроме того, возможно, что диаметр поршня при увеличении глубины вдвигания уменьшается. Дополнительно к этому, возможно, что поршень выполнен выпуклым или вогнутым. Все указанные формы могут также иметься на некоторых участках, так что поршень может иметь, например, конический участок и цилиндрический участок.
В качестве альтернативного решения или дополнительно к этому, вытеснительная камера имеет контурированную форму. Под этим следует понимать, что внутренняя стенка вытеснительной камеры может быть выполнена, как указывалось выше, конической, выпуклой, вогнутой и/или цилиндрической на некоторых участках.
Особенно простой в изготовлении гидравлический амортизатор получается, когда резервуар для текучей среды выполнен для хранения текучей среды по существу без давления. Таким образом, дополнительно максимально предотвращается потеря текучей среды. Особенно предпочтительно, если резервуар для текучей среды является сильфоном. Такой сильфон очень просто изготавливать. Поршень имеет погружаемый участок, который может погружаться в корпус цилиндра, и свободный участок, который не может погружаться в корпус цилиндра. Предпочтительно предусмотрено, что сильфон закреплен на корпусе цилиндра и на свободном участке. Таким образом, сильфон надежно закреплен и его можно легко заменять с целью технического обслуживания. Однако в принципе текучую среду можно хранить также под давлением.
Образованный сильфоном резервуар для текучей среды подвергается опасности механических воздействий, так что резервуар для текучей среды предпочтительно окружен гильзой, в частности пластмассовой гильзой, которая предпочтительно имеет, по меньшей мере, одно выравнивающее давление отверстие, с целью обеспечения возможности расширения сильфона или изменения приемного объема с помощью мембраны.
Для приведения в действие клапана, ортопедический гидравлический амортизатор предпочтительно имеет расположенный снаружи корпуса цилиндра магнит, при этом клапан выполнен с возможностью приведения с помощью магнита из открытого положения в закрытое положение. Переключение с помощью магнита можно использовать также в других типах гидравлического амортизатора, в которых нет кольцевого зазора или же которые являются амортизаторами двойного действия или поворотными гидравлическими амортизаторами. Это может быть реализовано, например, тем, что магнит является электромагнитом, который взаимодействует с ферромагнитным шариком клапана. Это происходит, например, за счет того, что при пропускании тока через электромагнит шарик клапана перемещается так, что клапан переводится в открытое положение или, альтернативно, в закрытое положение. В качестве альтернативного решения предусмотрено, что магнит является постоянным магнитом, который с помощью расположенного снаружи корпуса цилиндра исполнительного механизма или механического сцепления может сдвигаться и автоматически приводиться в действие для взаимодействия с шариком клапана.
Дополнительно к этому в ортопедическом гидравлическом амортизаторе согласно изобретению корпус цилиндра и/или поршень изготовлены из пластмассы, в частности, литьем под давлением. Такой гидравлический амортизатор предпочтительно имеет признак отличительной части пункта 23 формулы изобретения и/или один или несколько указанных выше признаков. В этом случае может быть предусмотрено, что поршень установлен в вытеснительной камере с помощью уплотнения, например уплотнительного кольца с круглым поперечным сечением. В этом случае наряду с возвратным трубопроводом может быть предусмотрен другой трубопровод, который соединяет резервуар для текучей среды с вытеснительной камерой.
Ниже приведено более подробное пояснение вариантов выполнения изобретения со ссылками на прилагаемые чертежи, на которых одинаковыми позициями обозначены одинаковые или одинаково действующие компоненты или элементы и на которых изображено:
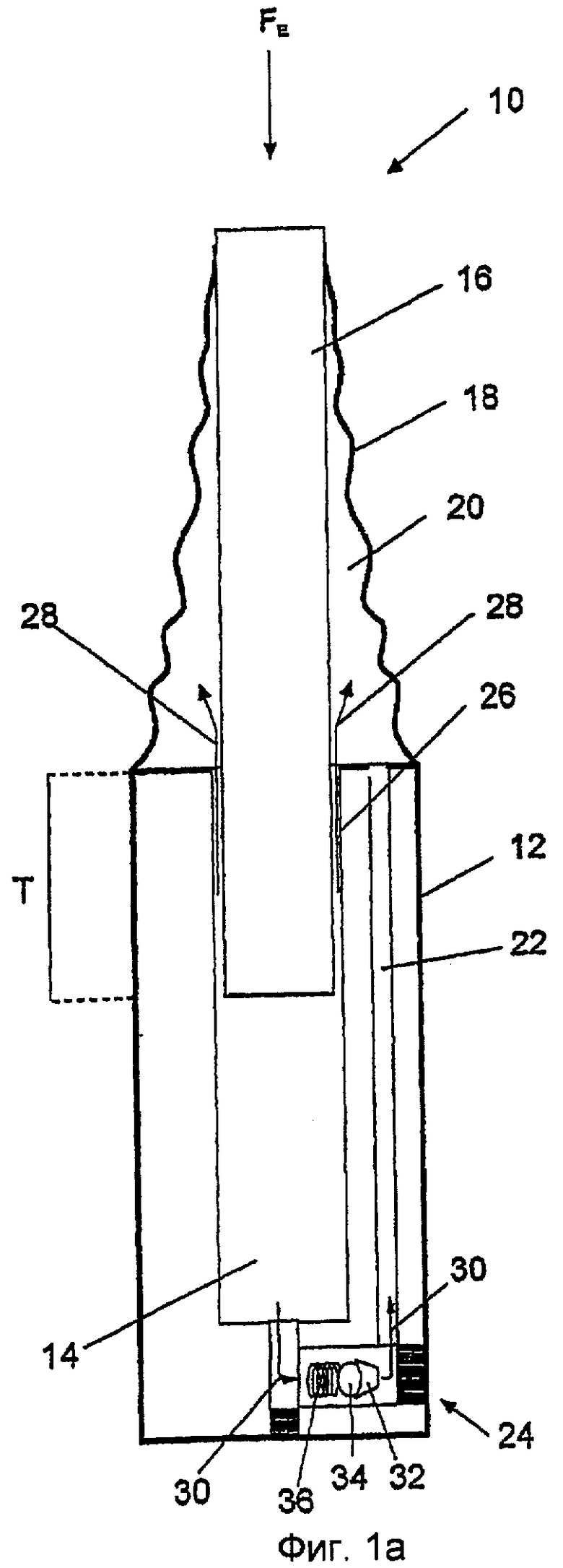
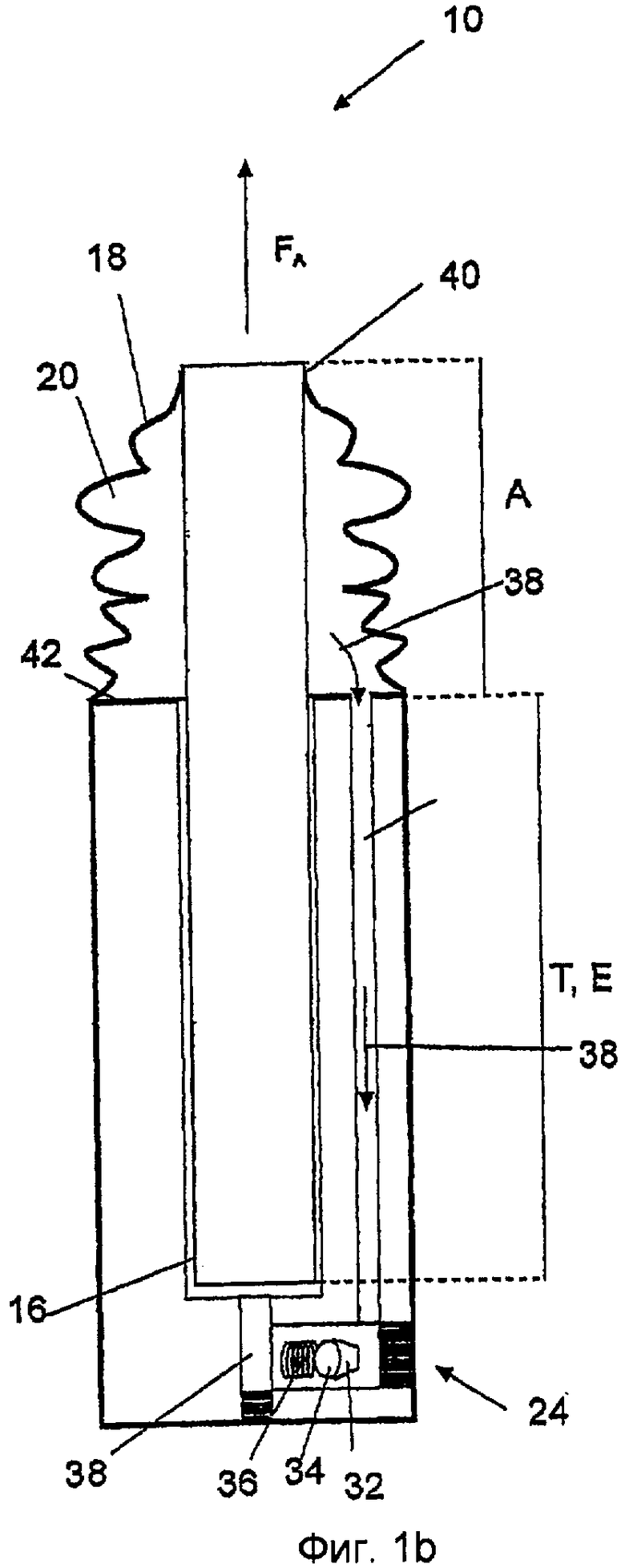
фиг. la - разрез ортопедического гидравлического амортизатора согласно изобретению, в котором поршень вдвинут на небольшую глубину в вытеснительную камеру; фиг. 1b - гидравлический амортизатор по фиг. 1а, в котором поршень вдвинут по существу полностью в вытеснительную камеру;
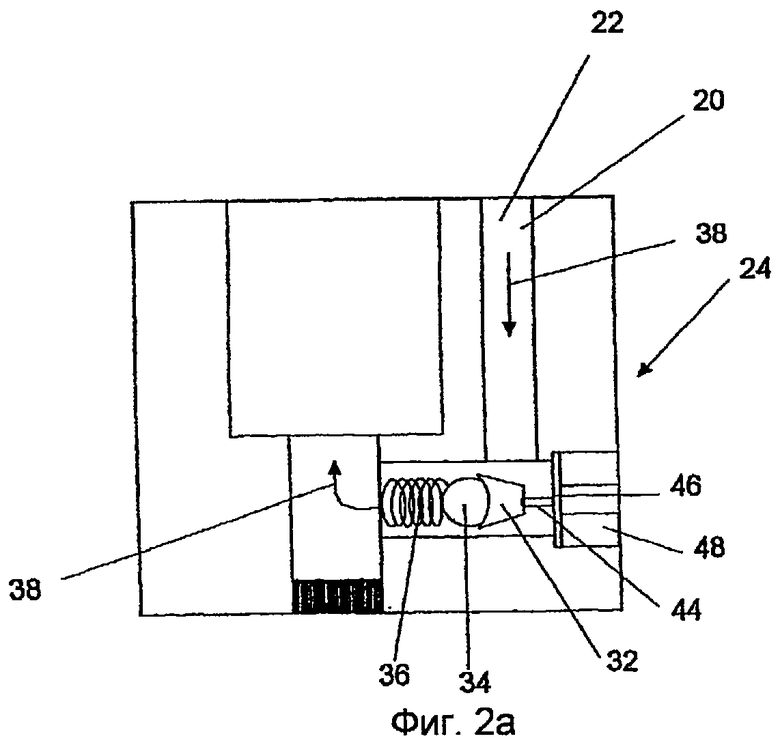
фиг. 2а - разрез клапана гидравлического амортизатора по фиг. 1а и 1b в закрытом положении в увеличенном масштабе;
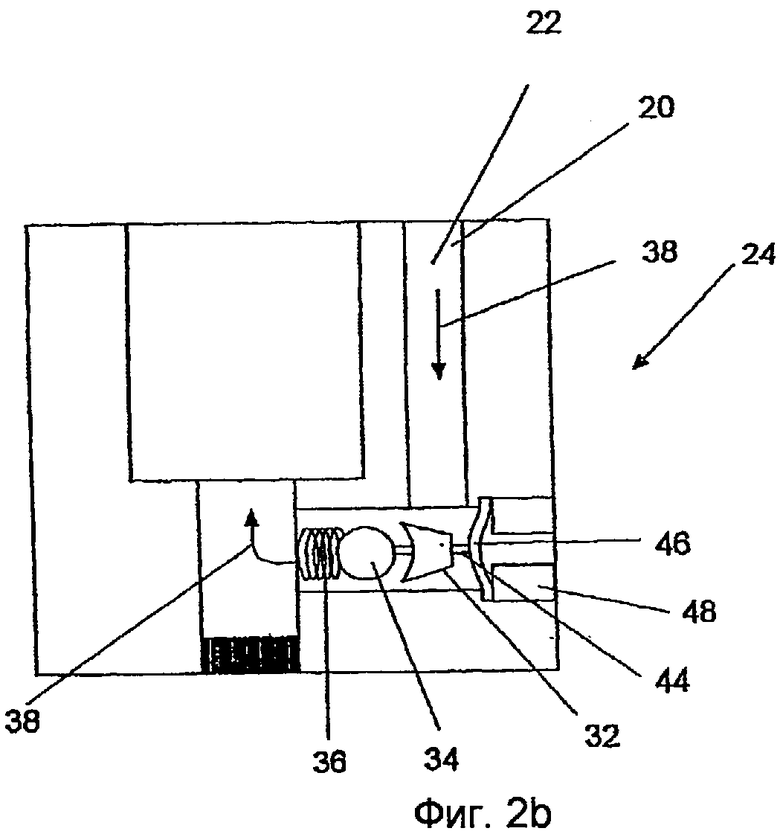
фиг. 2b - клапан по фиг. 2а в открытом положении;
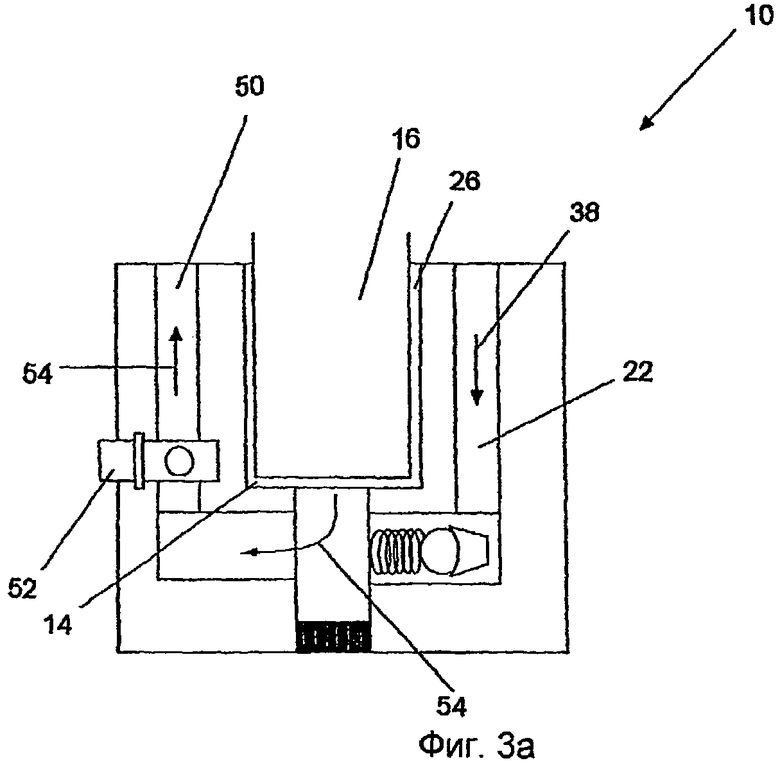
фиг. 3а - разрез клапана другого варианта выполнения ортопедического гидравлического амортизатора согласно изобретению с байпасным трубопроводом, в котором расположен байпасный клапан, который закрыт;
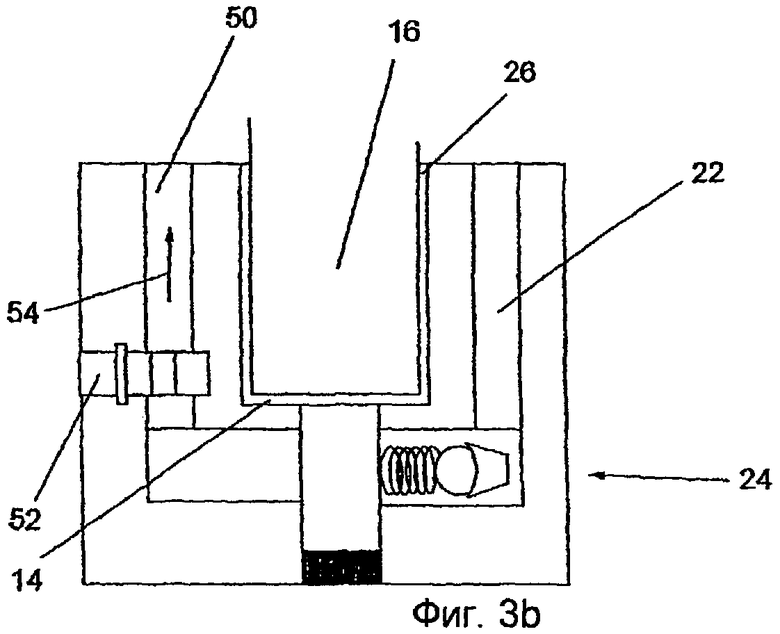
фиг. 3b - клапан по фиг. 3а в открытом положении;
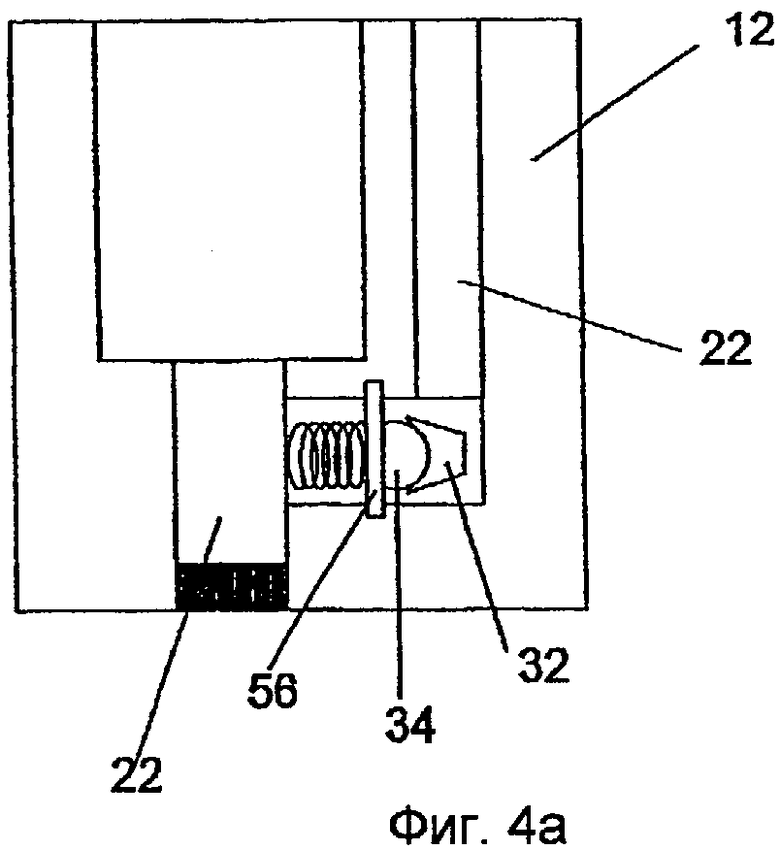
фиг. 4а - разрез клапана другого варианта выполнения ортопедического гидравлического амортизатора согласно изобретению с электромагнитом, через который не проходит ток;
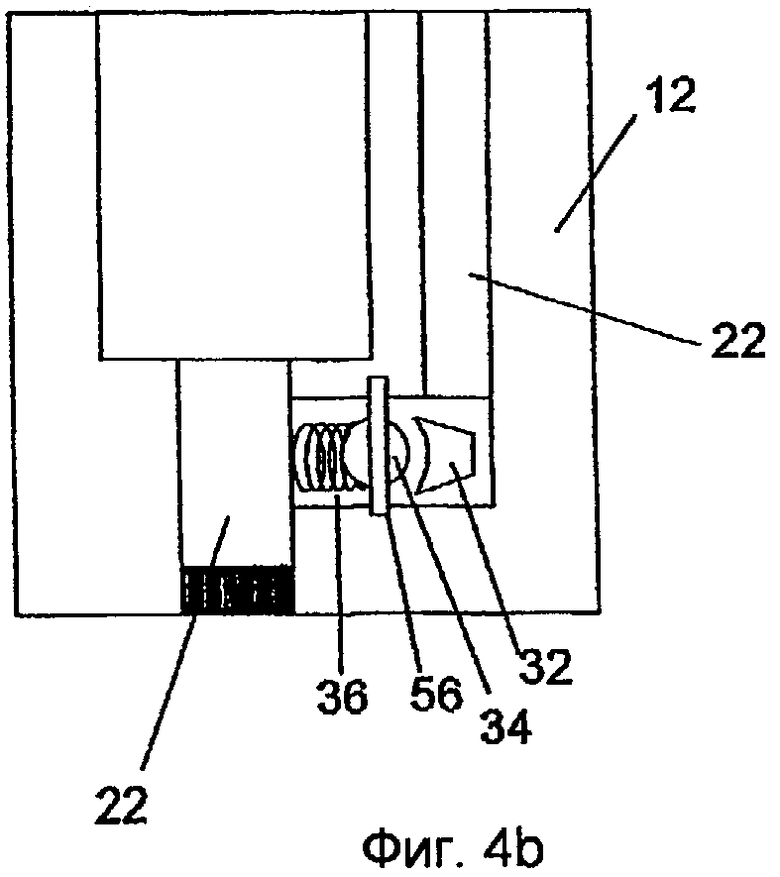
фиг. 4b - клапан по фиг. 4а при пропускании тока;
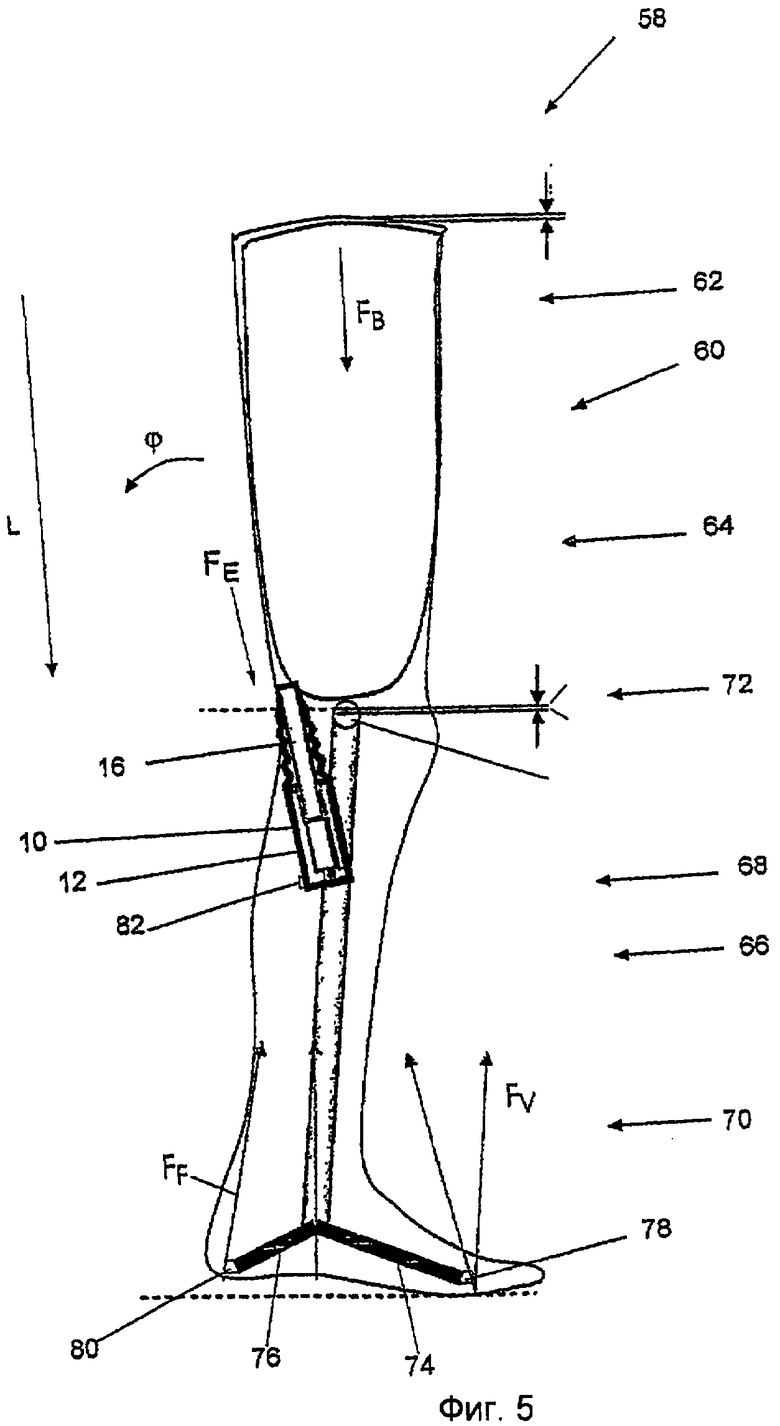
фиг. 5 - ортопедическое вспомогательное средство согласно изобретению в виде ножного протеза в разогнутом положении;
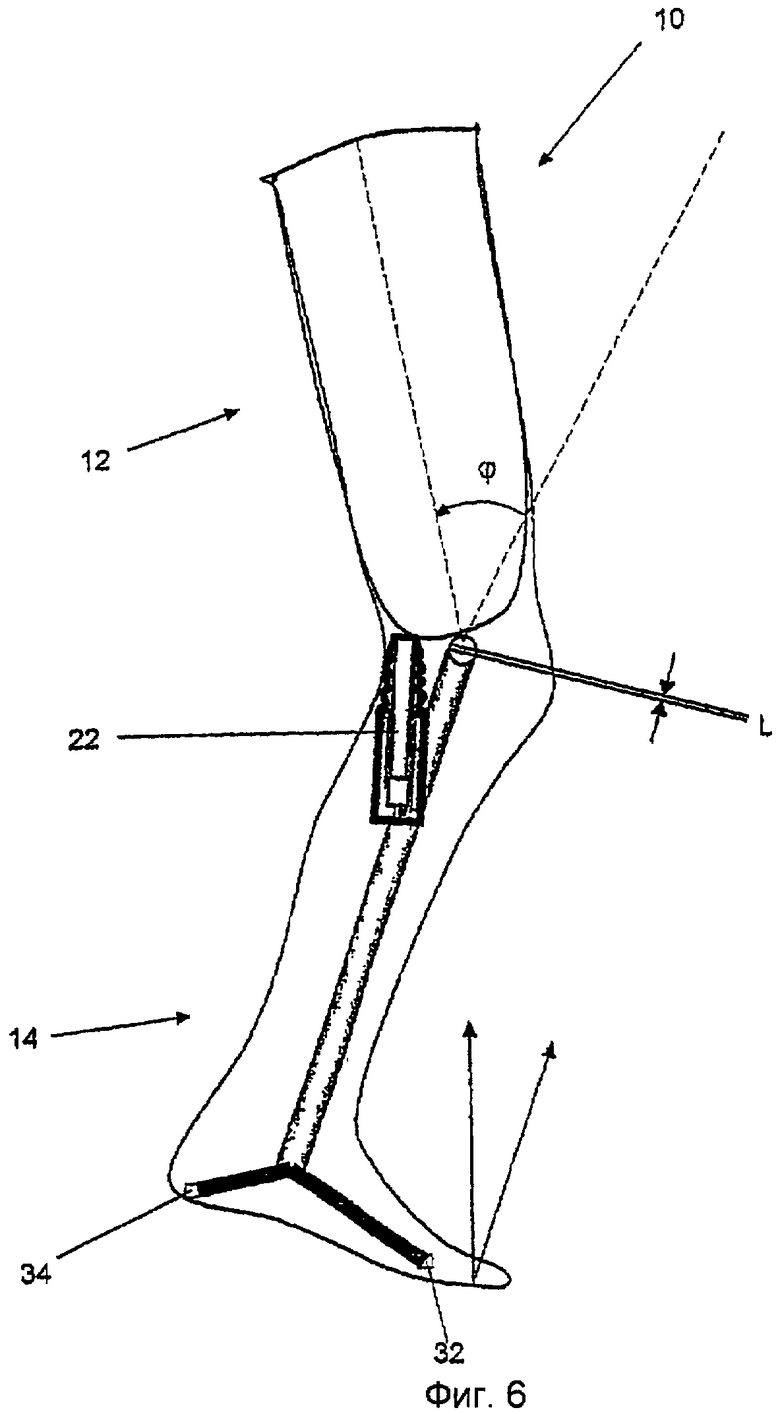
фиг. 6 - ножной протез по фиг. 5 в согнутом положении;
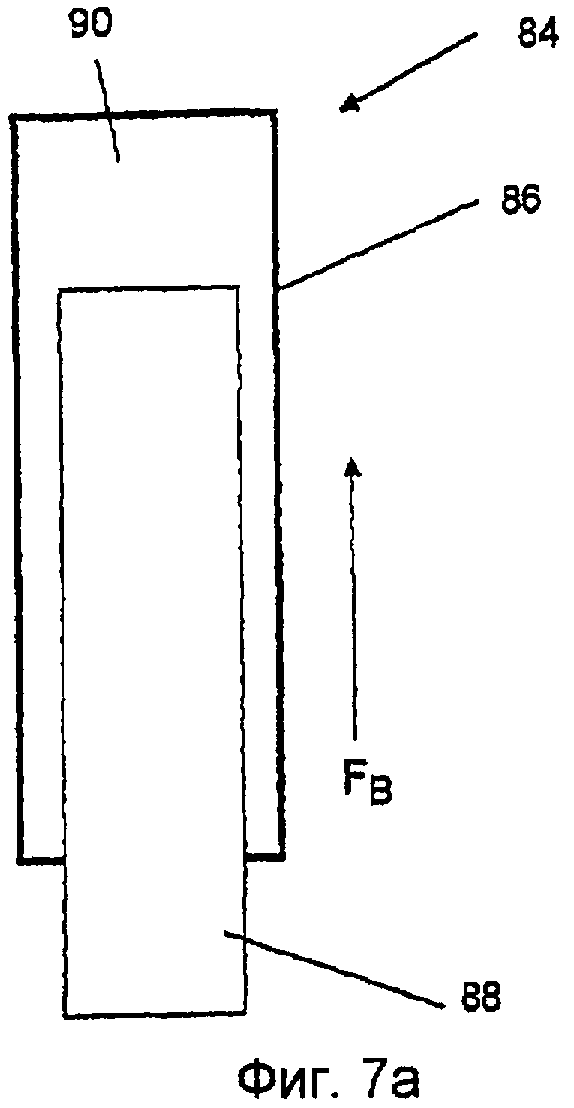
фиг. 7 - первый вариант выполнения датчика действующей в ноге силы;
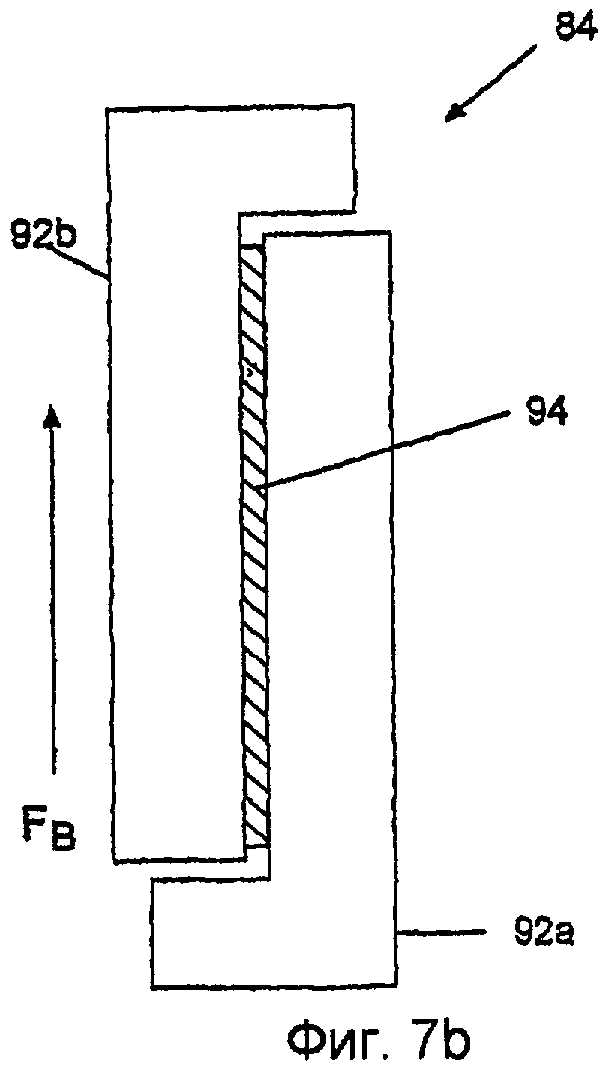
фиг. 7b - альтернативный вариант выполнения датчика действующей в ноге силы;
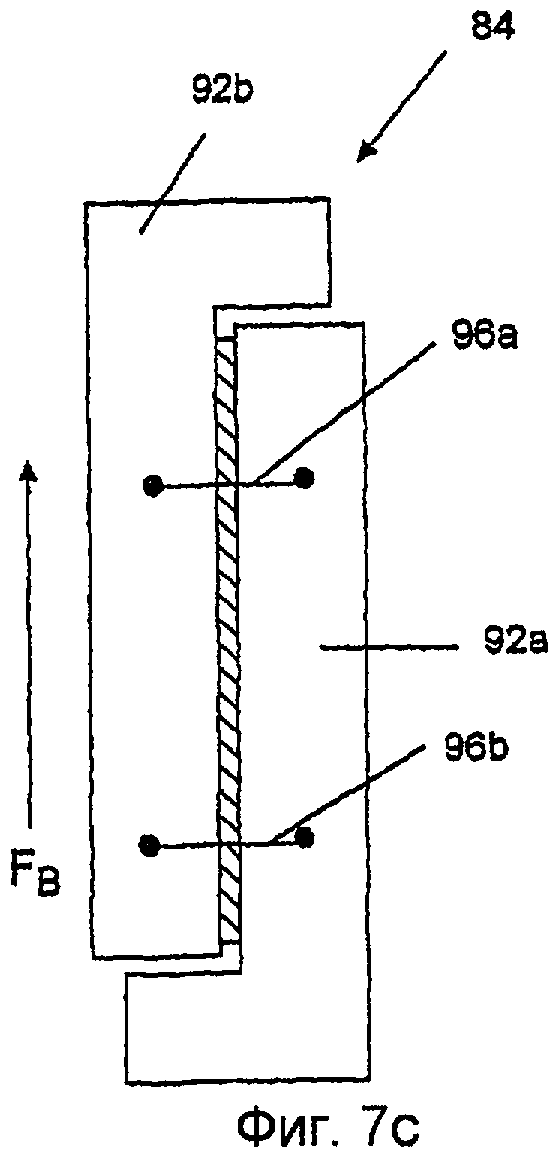
фиг. 7с - другой альтернативный вариант выполнения датчика действующей в ноге силы;
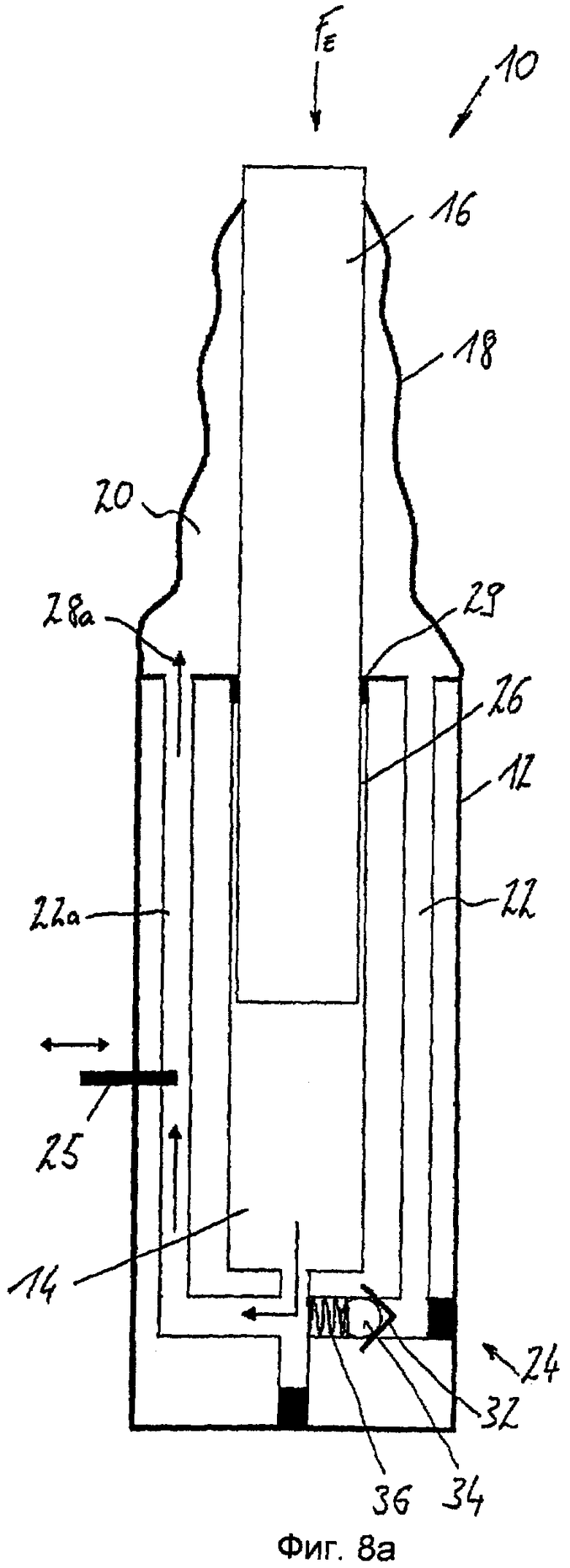
фиг. 8а, 8b - вариант выполнения гидравлического амортизатора в двух положениях;
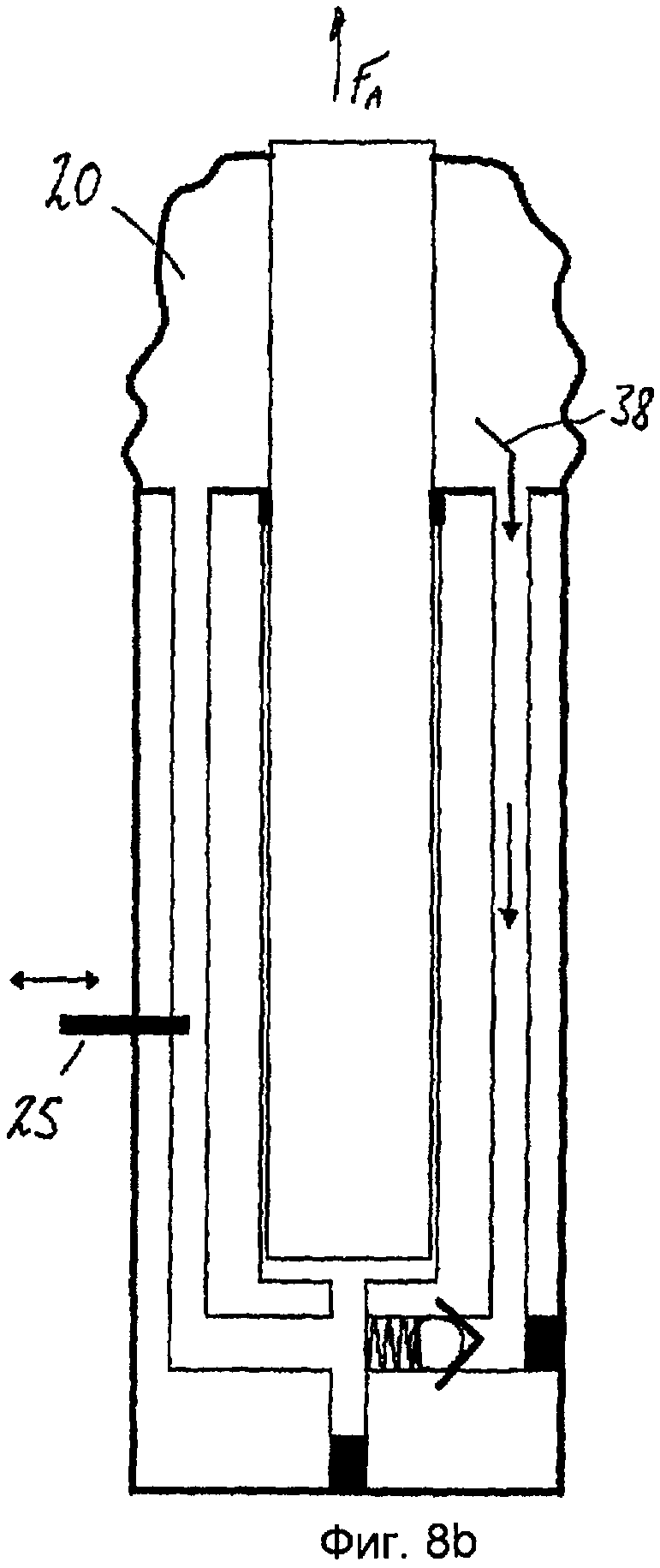
фиг. 9а, 9b - другой вариант выполнения гидравлического амортизатора в различных положениях;
фиг. 10а, 10b - ножной протез в нагруженном и ненагруженном состоянии;
фиг. 11 - вариант выполнения ножного протеза с зависящим от угла гидравлическим переключением.
На фиг. 1 показан ортопедический гидравлический амортизатор 10, который содержит корпус 12 цилиндра из пластмассы с образованной в нем вытеснительной камерой 14, установленный в вытеснительной камере 14, выполненный из пластмассы поршень 16, резервуар в виде изготовленного из эластомера сильфона 18 для текучей среды в виде гидравлической жидкости 20, выполненный в корпусе 12 цилиндра возвратный трубопровод 22 и клапан 24. Поршень 16 выполнен в форме цилиндра и установлен в корпусе 12 цилиндра с образованием кольцевого зазора 26. Клапан 24, который на фиг. 1а схематично показан в закрытом положении, содержит клапанное седло 32, клапанный шарик 34 и спиральную пружину 36, которая подпружинивает клапанный шарик 34 к клапанному седлу 32.
Корпус 12 цилиндра и поршень 16 могут в качестве альтернативного решения быть выполнены из алюминия или нержавеющей стали или же содержать заделанную в пластмассу или покрытую пластмассой шприцеванием металлическую гильзу в качестве гильзы цилиндра.
Путь, который проходит поршень 16 в корпусе 12 цилиндра, представляет глубину Т вдвигания. Когда поршень 16 вдвигается дальше в корпус 12 цилиндра, так что увеличивается глубина Т вдвигания, то находящаяся в вытеснительной камере 14 гидравлическая жидкость 20 вытесняется через кольцевой зазор 26 вдоль пути 28 прохождения текучей среды из кольцевого зазора в сильфон 18, поскольку путь 30 прохождения текучей среды через возвратный трубопровод закрыт клапаном 24.
Гидравлическая жидкость 20 встречает вдоль пути 28 прохождения текучей среды из кольцевого зазора сопротивление кольцевого зазора, которое зависит от скорости, с которой поршень 16 вдвигается в корпус 12 цилиндра. Эта скорость зависит в свою очередь от силы FE вдвигания, с которой вдвигается поршень 16. За счет сопротивления текучей среде в кольцевом зазоре демпфируется движение поршня 16 в корпус 12 цилиндра.
На фиг. 1b показан по существу полностью вдвинутый в вытеснительную камеру 14 поршень 16, который под действием вытягивающей силы FA вытягивается из вытеснительной камеры 14. Из сильфона 18 гидравлическая жидкость 20 протекает вдоль возвратного пути 38 прохождения потока через клапан 24 в вытеснительную камеру 14. Клапан 24 выполнен в виде обратного клапана и обеспечивает возможность свободного прохождения гидравлической жидкости 20 в этом направлении.
На фиг. 1b дополнительно показаны погружаемый участок Е поршня 16 и свободный участок А, который не погружается в корпус 12 цилиндра. Сильфон 18 закреплен, с одной стороны, на противоположном корпусу 12 цилиндра конце 40 поршня 16 и тем самым на свободном участке А и, с другой стороны, на противоположной концу 40 торцевой стороне 42 корпуса 12 цилиндра. Например, сильфон приклеен, приварен или входит в соответствующие не изображенные канавки в поршне 16, соответственно, корпусе 12 цилиндра.
На фиг. 2а показан в увеличенном масштабе противоположный поршню 16 конец корпуса 12 цилиндра. Можно видеть, что клапанный шарик 34 приводится в действие с помощью исполнительного механизма, который содержит штифт 44, исполнительную мембрану 46 и основное исполнительное тело 48. В нерабочем состоянии, которое показано на фиг. 2а, клапанный шарик 34 прилегает к клапанному седлу 32 и препятствует прохождению текучей среды из вытеснительной камеры 14 в возвратный трубопровод 22. В противоположность этому, гидравлическая жидкость 20 может протекать вдоль возвратного пути 38 прохождения за счет того, что она поднимает клапанный шарик 34 с клапанного седла 32 против силы спиральной пружины 36.
На фиг. 2b показан исполнительный механизм в рабочем положении, в котором штифт 44 отжимает клапанный шарик 34 с клапанного седла 32. В этом положении гидравлическая жидкость может проходить через клапан 24 как вдоль возвратного пути 38, так и в противоположном направлении.
На фиг. 3а показан альтернативный вариант выполнения гидравлического амортизатора 10, который наряду с возвратным трубопроводом 22 имеет байпасный трубопровод 50, который также соединяет вытеснительную камеру 14 с не изображенным на фиг. 3а сильфоном 18. В этом варианте выполнения нет необходимости в кольцевом зазоре 26. В байпасном трубопроводе 50 расположен байпасный клапан 52, который может полностью или частично закрывать байпасный трубопровод 50, так что обеспечивается возможность установки заданного сопротивления текучей среде. При вытягивании поршня 16 из корпуса 12 цилиндра, гидравлическая жидкость 20 может протекать по возвратному пути 38 через возвратный трубопровод 22 в вытеснительную камеру 14. При вдвигании поршня 16 в вытеснительную камеру 14, гидравлическая жидкость 20 вытесняется в показанной на фиг. 3а ситуации через кольцевой зазор 26 в сильфон (см. фиг. 1а). В противоположность этому, путь 54 прохождения текучей среды через байпасный трубопровод блокирован закрытым байпасным клапаном 52, а возвратный трубопровод 22 закрыт клапаном 24.
На фиг. 3b показано состояние, в котором байпасный клапан 52 открыт, так что при вдвигании поршня 16 в вытеснительную камеру 14 гидравлическая жидкость может протекать вдоль пути 54 прохождения текучей среды через байпасный трубопровод.
На фиг. 4а показан установленный снаружи корпуса 12 цилиндра электромагнит 56, который может воздействовать на ферромагнитный клапанный шарик 34. На фиг. 3а через электромагнит 56 не проходит ток, так что клапанный шарик 34 прижимается спиральной пружиной 36 к клапанному седлу 32.
На фиг. 4b показано состояние, в котором через электромагнит 56 проходит ток и клапанный шарик 34 поднят с клапанного седла 32. Электромагнит 56 может кольцеобразно окружать корпус 12 цилиндра частично или полностью, с целью эффективного взаимодействия с клапанным шариком 34.
В качестве альтернативного решения предусмотрен постоянный магнит, который соединен с возможностью перемещения с исполнительным механизмом. Перемещение постоянного магнита с помощью исполнительного механизма приводит к перемещению клапанного шарика 34.
На фиг. 5 показано ортопедическое вспомогательное средство согласно изобретению в виде ножного протеза 58, который содержит гидравлический амортизатор 10 согласно изобретению, бедро 60 с проксимальным концом 62 бедра и дистальным концом 64 бедра, а также голень 66 с проксимальным концом 68 голени и дистальным концом 70 голени. Бедро 60 и голень 66 соединены друг с другом в коленном суставе 72 и проходят в разогнутом положении в продольном направлении L. Гидравлический амортизатор 10 соединен своим поршнем 16 с дистальным концом 64 бедра, а своим корпусом 12 цилиндра - с проксимальным концом 68 голени, и вызывает демпфирование поворотного движения бедра 60 относительно голени 66 на угол φ поворота. Когда бедро 60 поворачивается относительно голени 66, возникает сила FE вдвигания, действующая на поршень 16, и происходит указанное выше демпфирующее действие.
Ножной протез 58 имеет переднюю часть 74 ступни и заднюю часть 76 ступни. На передней части 74 ступни расположен датчик 78 для измерения силы Fv в передней части ступни, а на задней части ступни смонтирован датчик 80 для измерения силы FF, действующей в пяточной части ступни. Оба датчика соединены через не изображенную электрическую линию с электрическим управляющим устройством 82, которое является частью гидравлического амортизатора 10. Дополнительно к этому, электрическое управляющее устройство 82 соединено с датчиком 84 силы ноги. Датчик 78 силы передней части ступни, датчик 80 силы задней части ступни и датчик 84 силы ноги предназначены для определения осевой силы FB ноги, которая проходит от проксимального конца 82 бедра к дистальному концу 70 голени. Электрическое управляющее устройство 82 определяет осевую силу FB ноги, сравнивает ее с пороговым значением закрывания, соответственно, с пороговым значением освобождения, которое хранится в электрической памяти электрического управляющего устройства 82, и управляет на основе этого сравнения, например, электромагнитом 56 (см. фиг. 4b). Если, например, осевая сила FB ноги превышает предварительно установленное пороговое значение закрывания, то это является указателем того, что ножной протез 58 нагружается пациентом и необходимо большое сопротивление сгибанию. Затем электрическое управляющее устройство 82 прерывает ток в электромагните 56, так что блокируется путь 30 прохождения текучей среды через возвратный трубопровод (см. фиг. 1а) для гидравлической жидкости 20 и необходимо прикладывать большую силу FE вдвигания для вдвигания поршня 16 в корпус 12 цилиндра. Тем самым ножной протез 58 имеет большое сопротивление сгибанию и придает пациенту высокую уверенность при стоянии. Кроме того, при стоянии ножной протез 58 геометрически фиксирован, поскольку линия приложения нагрузки проходит перед коленным суставом 72 и поэтому не сгибает ножной протез 58.
Когда к датчику 78 силы передней части ступни прикладывается значительно большая сила, чем к датчику 80 силы задней части ступни, то это является указателем того, что пациент хочет сесть и электрическое включающее управляющее устройство 82 закрывает также клапан 24. Это состояние показано на фиг. 6.
Однако когда осевая сила FB ноги является небольшой, то ножной протез 58 не нагружен и электрическое управляющее устройство 82 пропускает ток через электромагнит 56, так что гидравлическая жидкость может также протекать по пути 30 прохождения текучей среды через возвратный трубопровод (см. фиг. 1а). В этом случае голень 66 (см. фиг. 5) может свободно поворачиваться относительно бедра 60.
На фиг. 7а показан вариант выполнения датчика 84 силы ноги с гильзой 86, предназначенной для вдвигания измерительного поршня 88 против сопротивления, действующего за счет наполнительного материала в клеевом шве. Датчик 84 силы ноги содержит средства для определения относительного положения измерительного поршня 88 относительно гильзы 86, которое пропорционально осевой силе FB ноги.
На фиг. 7b показан альтернативный вариант выполнения датчика 84 силы ноги, в котором два L-образных измерительных элемента 92а, 92b соединены через упругий элемент 94. Датчик 84 силы ноги содержит не изображенное средство для определения относительного положения обоих измерительных элементов 92а, 92b относительно друг друга, которое представляет меру действующей по оси ноги силы FB.
На фиг. 7с показан другой альтернативный вариант выполнения датчика 84 силы ноги, который отличается от показанного на фиг. 7b датчика тем, что оба измерительных элемента 92а, 92b соединены двумя перемычками 96а, 96b.
На фиг. 8а и 8b показан гидравлический амортизатор 10, который по существу соответствует показанному на фиг. 1а и 1b амортизатору. Вместо кольцевого зазора 26, который открыт и обеспечивает возможность прохождения обратного потока гидравлической жидкости из вытеснительной камеры 14 в резервуар для текучей среды сильфона 18, в варианте выполнения согласно фиг. 8а и 8b кольцевой зазор 26 закрыт уплотнением 29. Вместо пути 28 прохождения текучей среды через кольцевой зазор, согласно показанному на фиг. 1а и 1b варианту выполнения, гидравлическая жидкость 20 протекает из вытеснительной камеры 14 через возвратный трубопровод 22а, так что образуется путь 28а прохождения текучей среды через возвратный трубопровод. Внутри возвратного трубопровода 22а расположен клапан 25, который предпочтительно выполнен в виде магнитного клапана и может изменять поперечное сечение возвратного трубопровода 22а. Чем больше открыт клапан 25, тем легче гидравлическая жидкость 20 перетекает из вытеснительной камеры 14 обратно в резервуар для текучей среды сильфона 18, чем больше клапан 25 сужает поперечное сечение потока, тем больше сопротивление введению поршня 16. За счет увеличения силы FE вдвигания увеличивается сопротивление сгибанию в коленном суставе ножного протеза. Наряду с выполнением клапана 25 в виде магнитного клапана, могут быть предусмотрены другие выполнения клапана, в частности в виде сервоклапанов, которые обеспечивают возможность быстрого и простого изменения поперечного сечения потока в возвратном трубопроводе 22а.
Резервуар для текучей среды в показанном примере выполнения образован объемом внутри сильфона 18, в то время как гидравлический амортизатор 10 выполнен в виде предназначенного для линейного движения гидравлического амортизатора. Резервуар для текучей среды может иметь также альтернативные варианты выполнения, в частности, в резервуаре для текучей среды можно создавать давление, так что гидравлическая жидкость вдавливается в резервуар или выдавливается из него с преодолением давления, которое может быть изменяемым. Вместо выполнения гидравлического амортизатора 10 в виде линейного поршневого амортизатора, он может быть выполнен также в виде поворотного гидравлического амортизатора, в котором поворотный поршень поворачивается туда и обратно. В этом случае предусмотренные по обе стороны поршня вытеснительные камеры образуют соответствующий резервуар для текучей среды для протекающей через корпус гидравлической жидкости.
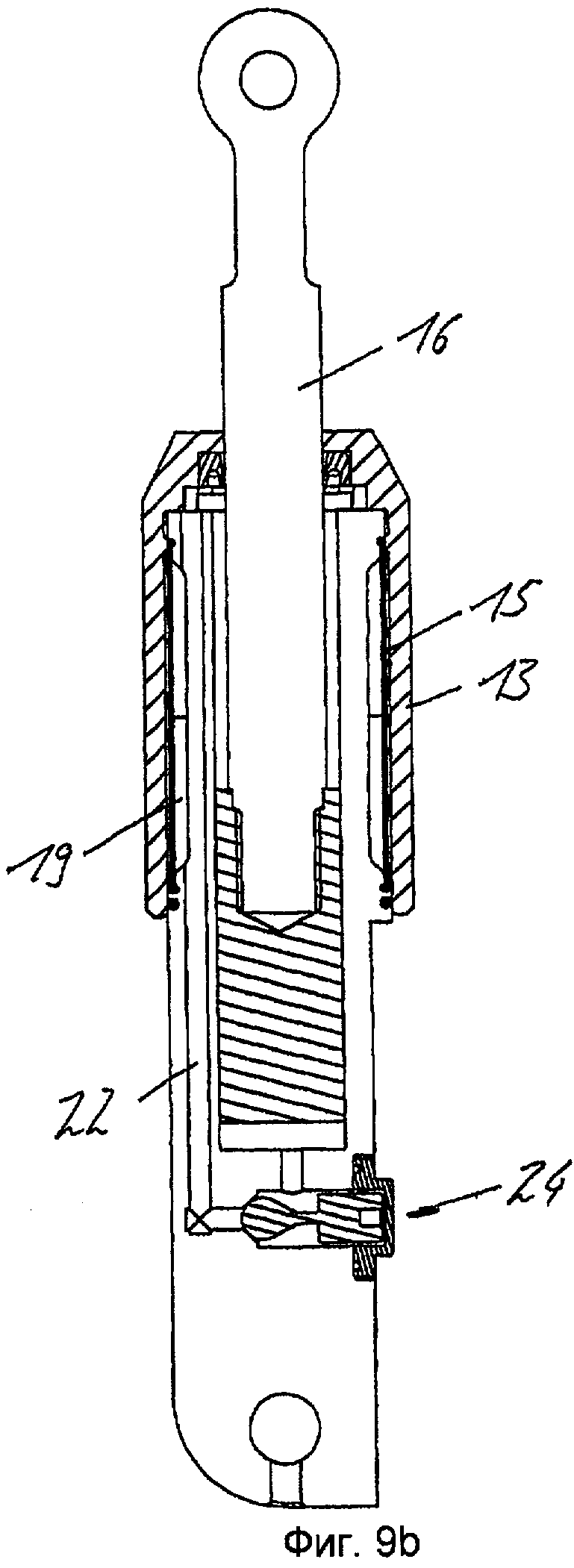
На фиг. 9а и 9b показан вариант выполнения гидравлического амортизатора 10. На фиг. 9а гидравлический амортизатор 10 показан в выдвинутом положении, на фиг. 9b - во вдвинутом положении. Вместо упругого сильфона 18, предусмотренного в примерах выполнения согласно фиг. 1, 5, 6 и 8, гидравлический амортизатор, согласно фиг. 9а и 9b, имеет стабильный по форме защитный колпачок 13, который расположен на обращенном к поршню конце корпуса 12. Вместо сильфона 18 предусмотрена мембрана 15, которая выполнена упругой и может перемещаться внутри колпачка 13 в направлении корпуса 12. Мембрана 15 окружает с уплотнением кольцевой зазор 19, так что между мембраной 15 и корпусом 12 образуется резервуар 19 для текучей среды. На фиг. 9а поршень 16 показан в выдвинутом положении, так что гидравлическая жидкость собирается в вытеснительной камере 14. Резервуар 19 для текучей среды принимает минимальную величину, что достигается тем, что мембрана 15 перемещается в направлении корпуса 12. За счет этого на обращенной к колпачку 13 стороне мембраны 15 образуется компенсационный объем 17, который через не изображенные отверстия или выравнивающие давление отверстия в колпачке 13 заполняется воздухом. При вдвигании поршня, как показано на фиг. 9b, требуется больший объем внутри резервуара 19 для текучей среды, так что мембрана 15 выдавливается наружу в направлении колпачка 13. Имеющийся в компенсационном объеме 17 воздух выдавливается из колпачка 13, за счет чего может увеличиваться объем резервуара 19 для текучей среды. В показанном примере выполнения резервуар 19 для текучей среды соединен через возвратный трубопровод 22 с контуром циркуляции гидравлической жидкости, однако в принципе возможно также соответствующее соединение через снабженный клапаном 25 возвратный трубопровод 22а.
Наряду с поршнем 16 одностороннего действия, как показано в приведенных примерах выполнения, можно также предусмотреть поршень 16 двустороннего действия для использования в гидравлическом амортизаторе 10. Колпачок 13 служит, в частности, для обеспечения механической защиты мембраны 15, которая выполняет функцию сильфона 18.
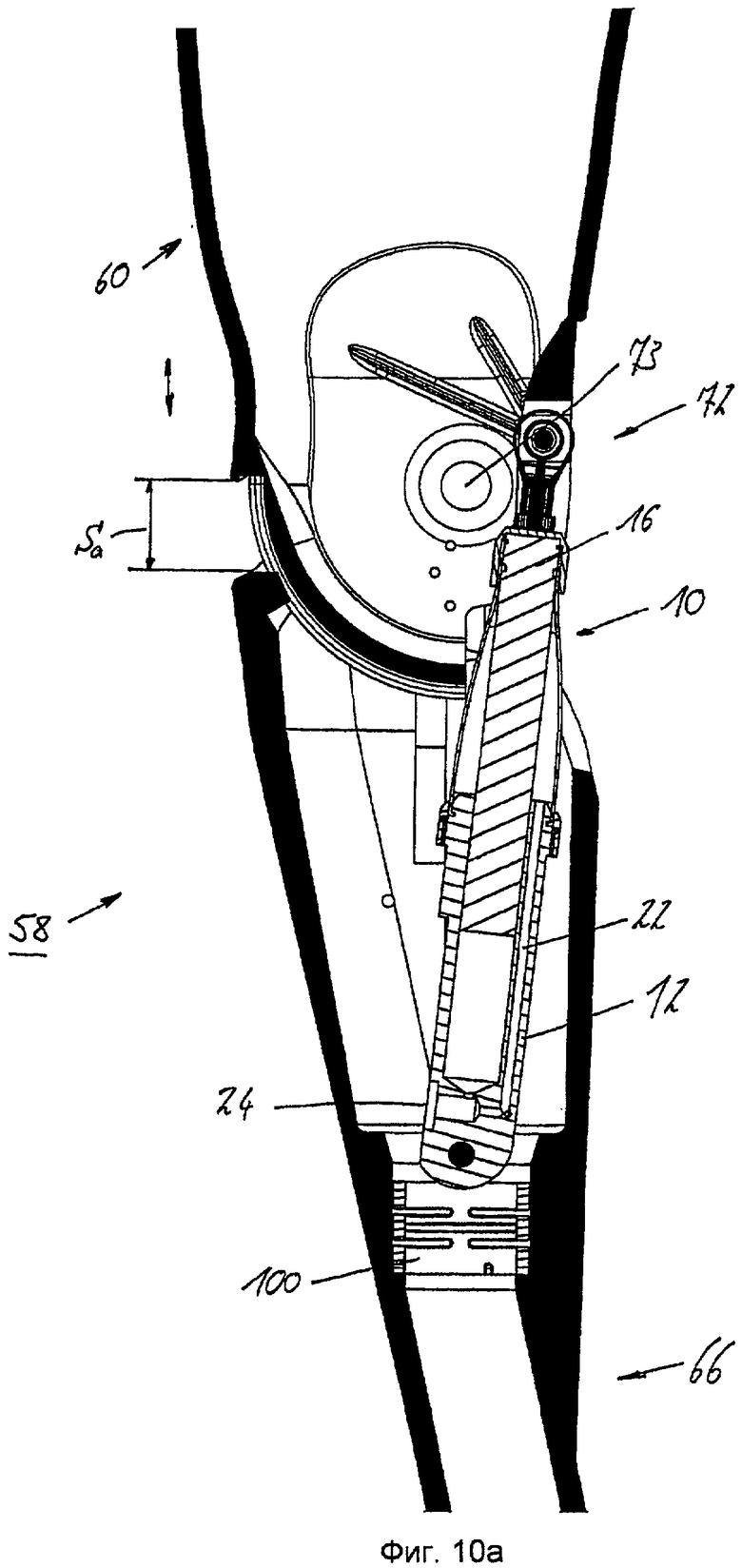
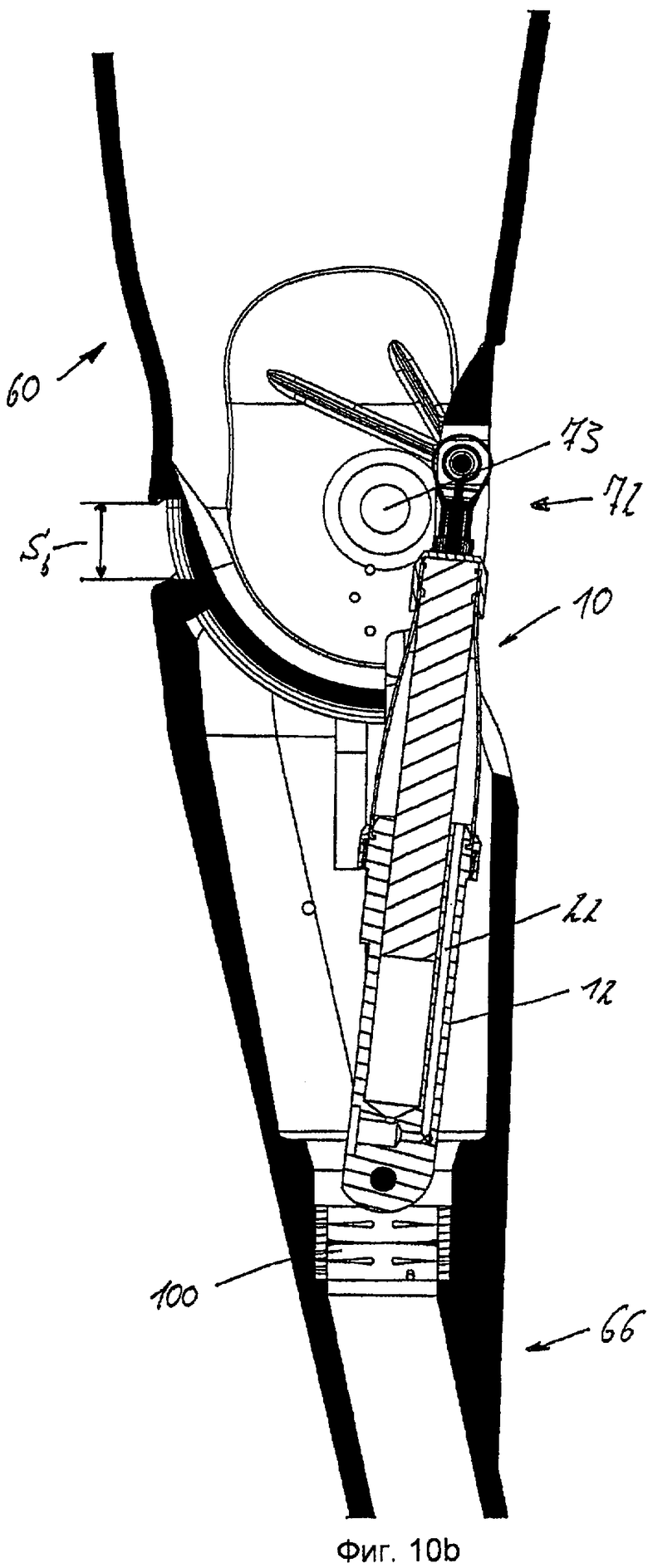
На фиг. 10а и 10b показаны различные состояния нагрузки ножного протеза. На фиг. 10а показан ножной протез 58 в ненагруженном состоянии. Часть 60 бедра с коленным суставом 72 и смонтированным на нем гидравлическим амортизатором 10 упруго опирается через расположенный на дистальном конце упругий элемент с возможностью перемещения относительно голени 66. Между приемной гильзой 60 бедра и приемной гильзой 66 голени предусмотрен зазор S, который имеет на фиг. 10а максимальную длину Sa. При приложении осевой силы к голени 66 пружинит упругий элемент 100, как показано на фиг. 10b. Упругий элемент 100 в показанном примере выполнения выполнен в виде имеющего цилиндрическую форму упругого элемента, который на фиг. 10b максимально сжат до размера своего блока. Теперь зазор S является минимальным и обозначен на фиг. 10b позицией Sb. Разница между Sa и Sb является путем сдвига, который по существу соответствует пути движения пружины 100, соответственно, упругого элемента 100. За счет сжатия упругого элемента 100 происходит относительное перемещение между гидравлическим амортизатором 10 и голенью 66, которое можно использовать либо для создания сигнала датчика для переключения клапана, либо для непосредственного механического переключения клапана. Дополнительно к этому, пружина 100 вызывает легкое демпфирование наступания, при этом вследствие относительно короткого хода пружины у носителя протеза не возникает чувства неуверенности. При осевой нагрузке, т.е. при наступании или стоянии пациента, переключение осуществляется так, что устанавливается повышенное гидравлическое сопротивление в гидравлическом амортизаторе 10 с целью обеспечения для пациента максимально возможного ощущения уверенности, без необходимости выполнения в ненагруженном состоянии, например при сидении, сложного механического деблокирования коленного сустава. В ненагруженном состоянии, показанном на фиг. 10а, можно выполнять поворот вокруг поворотной оси 73 коленного сустава 72, в нагруженном состоянии, согласно фиг. 10b, сопротивление существенно повышается, в идеальном случае происходит гидравлическое блокирование, так что без разрушения механических компонентов невозможно никакое сгибание.
При этом выбрано очень глубокое расположение упругого элемента 100 внутри голени 66 с целью максимального разнесения мест приложения сил для уменьшения нагрузки на механические компоненты. Переключение гидравлического амортизатора 10 осуществляется независимо от ориентации действующей на голень 66 силы, при этом после превышения порогового значения переключение инициируется либо с помощью датчика, либо с помощью механического устройства, такого как магнитный клапан 24, 25.
Если, например, в ножной протез 58 встроен гидравлический амортизатор 58, показанный на фиг. 8а и 8b, в котором клапан 25 выполнен в виде магнитного клапана, то может осуществляться непосредственное переключение за счет перемещения включающего магнита относительно магнитного клапана 25. При этом магнитный клапан 25 предварительно напряжен в направлении положения закрывания, так что при отсутствии противоположной силы включающего магнита, магнитный клапан 25 автоматически закрывается. Таким образом, если включающий магнит расположен в голени 66 и вызывается сжатие упругого элемента 100, то корпус 12 гидравлического амортизатора 10 перемещается относительно голени 66 и тем самым магнитный клапан 25 перемещается относительно включающего магнита. Если голень 66 достаточно нагружена, то включающий магнит удален настолько от магнитного клапана 25, что включающее усилие не превышает предварительного напряжения, так что магнитный клапан 25 закрывается. При разгрузке голени, возвратная сила пружины 100 перемещает корпус 12 в исходное положение согласно фиг. 10а и магнитный клапан 25 открывается. За счет этого уменьшается демпфирование, поскольку гидравлическая жидкость 20 может почти беспрепятственно протекать из вытеснительной камеры 14 в резервуар для текучей среды в сильфоне 18. В примере выполнения согласно фиг. 10а и 10b гидравлический амортизатор 10 имеет сильфон, однако в качестве альтернативного решения можно использовать также гидравлический амортизатор согласно фиг. 9а и 9b с колпачком 13 в качестве механической защиты сильфона 18 или мембраны 15. Однако в принципе может быть также предусмотрен гидравлический амортизатор 10 согласно фиг. 1а и 1b, при этом гидравлический амортизатор согласно фиг. 1а и 1b может быть также снабжен колпачком 13 для защиты от повреждения сильфона 18. В качестве альтернативы магнитному клапану можно приведение в действие клапана осуществлять также с помощью пружины с изгибом по продольной оси, кулисной направляющей или рычажного механизма.
В качестве альтернативы показанному варианту выполнения упругого элемента, могут быть также предусмотрены телескопические устройства и упругие элементы, которые обеспечивают возможность относительного перемещения бедра 60, соответственно, приемной гильзы 60 бедра и голени 66 относительно друг друга. В примере выполнения согласно фиг. 10а и 10b коленный сустав 72 вместе с гидравлическим амортизатором 10 и не изображенной распоркой выполнены в виде своего рода рамы и установлены на бедре, соответственно, на приемной гильзе 60 бедра, так что эти компоненты могут совместно опираться на голень 66. Расположение упругого элемента 100 в голени 66 является не обязательным, в принципе может быть также реализовано другое относительное перемещение между голенью 66 и амортизатором 10.
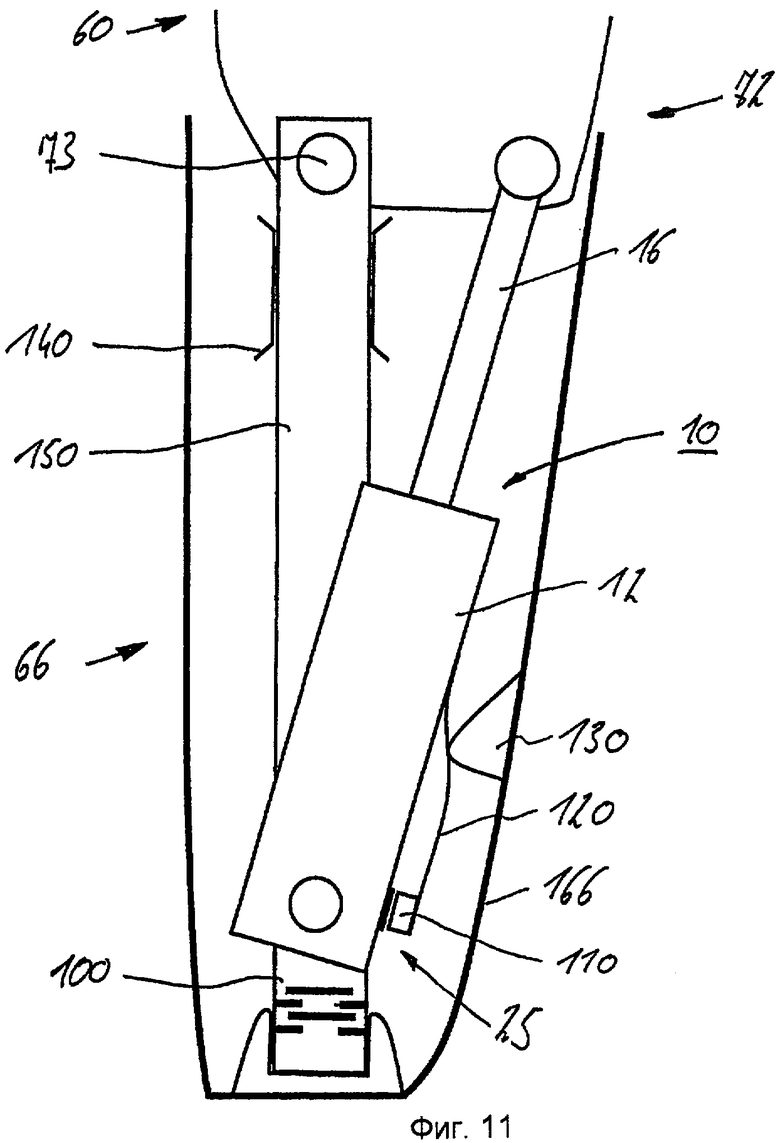
На фиг. 11 схематично показан вариант выполнения изобретения. Приемная гильза 60 бедра соединена с голенью 66 через поворотную ось 73 коленного сустава 72 с возможностью поворота. Голень 66 имеет корпус 166, внутри которого установлен гидравлический амортизатор 10, а также стержень 150. Стержень 150 несет на своем проксимальном конце поворотную ось 73, а на своем дистальном конце - упругий элемент 100. Кроме того, на этот стержень 150 опирается дистальный конец корпуса 12. Проксимальный конец поршня 16 расположен на приемной гильзе 60 бедра или на бедре 60. Внутри корпуса 166 расположен кулачок 130, который выступает в направлении корпуса 12 амортизатора. На корпусе 12 пружинно установлен включающий магнит 110 с помощью пружинного язычка 120. Включающий магнит 110 расположен противоположно магнитному клапану 25.
Внутри корпуса 166 предусмотрена также осевая направляющая 140 для стержня 150, которая обеспечивает возможность перемещения стержня 150 лишь в осевом направлении, так что предотвращается боковое перемещение стержня 150 и тем самым коленного сустава 120 и бедра 60 или приемной гильзы 60 бедра относительно голени 66. При приложении осевой силы к голени 66, которая имеет достаточно большую составляющую в направлении поворотной оси 73, упругий элемент 100 сжимается, так что пружинная пластинка 120 перемещается относительно кулачка 130. Вследствие изогнутой формы пружинной пластинки 120 уменьшается давление при увеличивающемся осевом перемещении в дистальном направлении, так что включающий магнит 110 за счет возвратной силы пружинной пластинки 120 все больше удаляется от магнитного клапана 25. Как только включающий магнит 110 достаточно удалится от магнитного клапана 25, магнитный клапан 25 мгновенно закрывается и скачкообразно повышает демпфирование. Тот же механизм можно использовать также для управления силой демпфирования в зависимости от угла. При повороте бедра 60 или приемной гильзы 60 бедра вокруг поворотной оси 73, место опоры поршня 16 на приемной гильзе 60 бедра выполняет круговое движение, которое наряду с вертикальной составляющей имеет также горизонтальную составляющую. За счет горизонтального перемещения поршня 16 и тем самым корпуса 12, переключающий кулачок 130 удаляется от пружинной пластинки 120, так что при увеличивающемся угле φ поворота бедра 60 относительно голени 66 приводится в действие магнитный клапан 25 за счет перемещения включающего магнита 110 от корпуса 12. Показанный вариант выполнения имеет то преимущество, что при выходе из строя управления, например при поломке пружинного язычка 120 или возникновении нежелательного осевого перемещения, мгновенно повышается демпфирование, так что коленный сустав 72 стабильно удерживается. Это чрезвычайно важно для гериатрических пациентов для обеспечения ощущения безопасности.
Наряду с магнитным приведением в действие клапана 25 можно осуществлять также другие механические сцепления, например, через дисковые кулачки, кулисные направляющие или рычажные устройства, которые закрывают клапан при достаточном перемещении в осевом направлении или при достаточном сгибании.
Упругий элемент 100 выполнен в виде блока пружин, который, наряду с обеспечением пути сдвига между приемной гильзой 60 бедра и приемной гильзой 66 голени, служит также для приема поперечных сил и предотвращения возможного люфта внутри шарнира 72 или протеза 58. Блок 100 пружин может воспринимать поперечные силы и обеспечивает определенное демпфирование наступания, при этом одновременно может быть установлен упор и ограничение осевого пути сдвига с помощью пружины 100.
Использование гидравлического амортизатора в гериатрическом коленном суставе рассматривалось до настоящего времени как слишком затратное, однако было установлено, что для этого очень хорошо подходят гидравлические амортизаторы, поскольку они не имеют эффекта скачкообразного движения (Stick-Slip), который возникает при других механических блокировках или тормозных приспособлениях. Наряду с указанным механическим переключением клапана 25, возможно также электронное измерение перемещения или осевой силы и соответствующее приведение в действие клапана с помощью исполнительного механизма. Зависящее от угла управление прикладывает, начиная с относительно небольшого угла сгибания, относительно большое сопротивление к шарниру 70 с целью обеспечения относительно рано большого демпфирования и надежности фазы стояния. Переключающее пороговое значение, при котором клапан 25 закрывается и обеспечивает повышенное сопротивление, можно регулировать, и оно лежит предпочтительно при угле сгибания между 20° и 50°. Внутри этого диапазона углов от 20° до 50° происходит переключение с относительно низкого сопротивления внутри гидравлического амортизатора на высокое сопротивление.
Перечень ссылочных позиций
10 Гидравлический амортизатор
12 Корпус цилиндра
13 Колпачок
14 Вытеснительная камера
15 Мембрана
16 Поршень
17 Свободное пространство
18 Сильфон
19 Резервуар для текучей среды
20 Гидравлическая жидкость
22 Возвратный трубопровод
22а Возвратный трубопровод
24 Клапан
25 Клапан
26 Кольцевой зазор
28 Путь прохождения текучей среды через кольцевой зазор
28а Возвратный путь прохождения текучей среды
29 Уплотнение
30 Путь прохождения текучей среды через возвратный трубопровод
32 Клапанное седло
34 Клапанный шарик
36 Спиральная пружина
38 Возвратный путь
40 Конец
42 Торцевая сторона
44 Штифт
46 Исполнительная мембрана
48 Исполнительное основное тело
50 Байпасный трубопровод
52 Байпасный клапан
54 Путь прохождения текучей среды через байпасный трубопровод
56 Электромагнит
58 Ножной протез
60 Бедро
62 Проксимальный конец бедра
64 Дистальный конец бедра
66 Голень
68 Проксимальный конец голени
70 Дистальный конец голени
72 Коленный сустав
73 Поворотная ось
74 Передняя часть ступни
76 Задняя часть ступни
78 Датчик силы передней части ступни
80 Датчик силы задней части ступни
82 Электрическое управляющее устройство
84 Датчик осевой силы ноги
86 Гильза
88 Измерительный поршень
90 Наполнительный материал
92а,b Измерительные элементы
94 Упругий элемент
96а,b Перемычки
100 Упругий элемент
110 Магнит
120 Пружина
130 Кулачок
140 Направляющая
150 Стержень
166 Корпус
Т Глубина вдвигания
FE Сила вдвигания
FA Сила вытягивания
FB Осевая сила ноги
Fv Сила передней части ступни
FF Сила пятки
Е Погружаемый участок
А Свободный участок
L Продольный угол
φ Угол поворота
S Путь сдвига
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОТЕЗНОГО ИЛИ ОРТЕЗНОГО КОЛЕННОГО ШАРНИРА | 2019 |
|
RU2778722C2 |
| ОРТОПЕДИЧЕСКОЕ СУСТАВНОЕ УСТРОЙСТВО | 2019 |
|
RU2803115C2 |
| ПРОТЕЗ КОЛЕННОГО СУСТАВА | 2011 |
|
RU2569027C2 |
| Протез бедра | 1985 |
|
SU1292763A1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| Амортизатор гидравлический регулируемый | 2021 |
|
RU2767559C1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2019 |
|
RU2784359C2 |
| ОРТОПЕДИЧЕСКИЙ ДЕМПФЕР ДЛЯ ОРТЕЗОВ КОЛЕННОГО СУСТАВА | 2019 |
|
RU2731310C1 |
| Ортопедический аппарат | 1979 |
|
SU797682A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032434C1 |
Группа изобретений относится медицине. Ортопедическое вспомогательное средство, в частности протез или ортез, содержит ортопедический гидравлический амортизатор, включающий образованную в корпусе вытеснительную камеру, установленный в вытеснительной камере поршень, резервуар для текучей среды, возвратный трубопровод, клапан, шарнир и устройство для измерения действующей на шарнир силы (Fв) для приведения клапана в закрытое состояние, если эта действующая на шарнир сила (Fв) превышает предварительно установленное пороговое значение. Возвратный трубопровод соединяет вытеснительную камеру с резервуаром для текучей среды. Клапан может принимать открытое положение и закрытое положение, в котором он, по меньшей мере, частично закрывает возвратный трубопровод. Шарнир имеет первое плечо и второе плечо. Первое плечо соединено с корпусом, а второе плечо - с поршнем. Амортизатор и шарнир установлены вместе на одной раме или же образуют раму, которая предназначена для перемещения, в частности сдвига, относительно одного из плеч. Способ управления вышеуказанным ортопедическим вспомогательным средством содержит стадии: измерения действующей на шарнир силы (Fв) и управления клапаном так, что он, по меньшей мере, частично закрывает возвратный трубопровод. Ортопедический гидравлический амортизатор, который предназначен для использования в вышеуказанном протезе или ортезе, содержит образованную в корпусе вытеснительную камеру, установленный в вытеснительной камере поршень, резервуар для текучей среды, возвратный трубопровод, который соединяет вытеснительную камеру с резервуаром для текучей среды, и клапан, который может принимать открытое положение и закрытое положение, в котором он, по меньшей мере, частично закрывает возвратный трубопровод. Поршень установлен в вытеснительной камере с образованием кольцевого зазора. Группа изобретений обеспечивает возможность использования ортопедического вспомогательного средства для гериатрических пациентов. 3 н. и 34 з.п. ф-лы, 11 ил.
1. Ортопедическое вспомогательное средство, в частности, протез (58) или ортез, содержащее ортопедический гидравлический амортизатор (10), включающий
(a) образованную в корпусе (12) вытеснительную камеру (14),
(b) установленный в вытеснительной камере (14) поршень (16),
(c) резервуар (18, 19) для текучей среды (20),
(d) возвратный трубопровод (22, 22а), который соединяет вытеснительную камеру (14) с резервуаром (18, 19) для текучей среды,
(e) клапан (24, 25), который может принимать открытое положение и закрытое положение, в котором он, по меньшей мере, частично закрывает возвратный трубопровод (22, 22а), и
(f) шарнир (72), который имеет первое плечо (60) и второе плечо (66), причем первое плечо (60) соединено с корпусом (12), а второе плечо (66) с поршнем (16), причем
(g) предусмотрено устройство (84) для измерения действующей на шарнир силы (Fв) для приведения клапана (24, 25) в закрытое состояние, если эта действующая на шарнир сила (Fв) превышает предварительно установленное пороговое значение,
отличающееся тем, что
h) амортизатор (10) и шарнир (72) установлены вместе на одной раме (150, 60, 10) или же образуют раму, которая предназначена для перемещения, в частности сдвига относительно одного из плеч (66).
2. Ортопедическое вспомогательное средство по п.1, отличающееся тем, что оно является ножным протезом (58) с коленным суставом (72), и устройство (84) для измерения воздействующей на коленный сустав (72) силы, действующей на шарнир, является датчиком осевой ноги силы для измерения действующей в продольном направлении (L) ножного протеза (58) вдоль оси ноги силы.
3. Ортопедическое вспомогательное средство по п.2, отличающееся тем, что предусмотрено электрическое управляющее устройство (82), которое электрически соединено с датчиком (84) осевой силы ноги и предназначено для электрического управления клапаном (24, 25).
4. Ортопедическое вспомогательное средство по п.2, отличающееся тем, что датчик (84) осевой силы ноги содержит расположенный в передней части (74) стопы датчик (78) силы передней части стопы.
5. Ортопедическое вспомогательное средство по п.3 или 4, отличающееся тем, что датчик (84) осевой силы ноги содержит расположенный в задней части (76) стопы датчик (80) силы задней части стопы.
6. Ортопедическое вспомогательное средство по п.2, отличающееся тем, что датчик (84) осевой силы ноги является несущим элементом протеза (58).
7. Ортопедическое вспомогательное средство по п.1, отличающееся тем, что устройство (84) для измерения действующей на шарнир силы выполнено механическим и перемещает клапан (24, 25) при нагрузке в закрытое положение.
8. Ортопедическое вспомогательное средство по п.7, отличающееся тем, что устройство (84) для измерения действующей на шарнир силы выполнено в виде пружины с изгибом по продольной оси, пружины (120), кулачковой направляющей, кулисной направляющей или в виде рычажной системы.
9. Ортопедическое вспомогательное средство по п.7 или 8, отличающееся тем, что устройство (84) соединено с магнитным клапаном (24, 25).
10. Ортопедическое вспомогательное средство по п.1, отличающееся тем, что оба плеча (60, 66) опираются друг на друга с возможностью ограниченного перемещения относительно друг друга.
11. Ортопедическое вспомогательное средство по п.1 или 10, отличающееся тем, что на одном плече (66) предусмотрена действующая в осевом направлении пружина (100), которая противодействует перемещению плеч (60, 66) друг к другу.
12. Ортопедическое вспомогательное средство по п.1, отличающееся тем, что между рамой (150, 60, 10) и одним из плеч (66) расположена пружина (100), которая противодействует перемещению плеча (66) к раме (150, 60, 10).
13. Ортопедическое вспомогательное средство по п.1, отличающееся тем, что гидравлический амортизатор (10) выполнен в виде цилиндрического амортизатора или в виде поворотного гидравлического амортизатора.
14. Ортопедическое вспомогательное средство по п.9, отличающееся тем, что устройство (84) выполнено так, что происходит зависящее от угла φ поворота перемещение включающего элемента (110) относительно клапана (24, 25).
15. Способ управления ортопедическим вспомогательным средством (58) по любому из пп.1-14, содержащий стадии:
(a) измерения действующей на шарнир силы (Fв) и
(b) управления клапаном (24, 25) так, что он, по меньшей мере, частично закрывает возвратный трубопровод (22, 22а).
16. Способ по п.15, отличающийся тем, что шарнир (72) является коленным суставом (72) и в качестве действующей на шарнир силы измеряют осевую силу (Fв) ноги, которая действует в продольном направлении (L) ножного протеза (58).
17. Способ по п.16, отличающийся тем, что клапаном (24, 25) управляют так, что он, по меньшей мере, частично закрывает возвратный трубопровод (22, 22а), когда осевая сила (FB) ноги превышает предварительно установленное пороговое значение закрывания.
18. Способ по любому из пп.15-17, отличающийся тем, что клапаном (24, 25) управляют так, что он открывает возвратный трубопровод (22, 22а), когда осевая сила (Fв) ноги уменьшается ниже предварительно установленного порогового значения открывания.
19. Способ по п.15, отличающийся тем, что клапан (24, 25) переключают независимо от положения плеч (60, 66).
20. Способ по п.15, отличающийся тем, что клапан (24, 25) переключают в зависимости от угла φ между плечами (60, 66).
21. Способ по п.19 или 20, отличающийся тем, что клапан (24, 25) переключают механически посредством передачи относительного перемещения плеч (60, 66) относительно друг друга на клапан (24, 25).
22. Ортопедический гидравлический амортизатор, который предназначен для использования в протезе (58) или ортезе по любому из пп.1-14, содержащий
(a) образованную в корпусе (12) вытеснительную камеру (14),
(b) установленный в вытеснительной камере (14) поршень (16),
(c) резервуар (18) для текучей среды (20),
(d) возвратный трубопровод (22), который соединяет вытеснительную камеру (14) с резервуаром (18) для текучей среды, и
(e) клапан (24), который может принимать открытое положение и закрытое положение, в котором он, по меньшей мере, частично закрывает возвратный трубопровод (22), причем
(f) поршень (16) установлен в вытеснительной камере (14) с образованием кольцевого зазора (26).
23. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что клапан (24) обеспечивает демпфирование движения поршня (16) в вытеснительной камере (14), при этом демпфирование, по существу, действует лишь в одном направлении перемещения поршня (16).
24. Ортопедический гидравлический амортизатор по п.22 или 23, отличающийся тем, что текучая среда (20)
- вдоль пути (28) прохождения текучей среды из вытеснительной камеры (14) через кольцевой зазор (26) в резервуар (18) для текучей среды испытывает сопротивление текучей среде кольцевого зазора и
- вдоль пути (30) прохождения текучей среды из вытеснительной камеры (14) через возвратный трубопровод (22) в резервуар (18) для текучей среды испытывает сопротивление текучей среде возвратного трубопровода,
при этом кольцевой зазор (26) имеет площадь поперечного сечения, которая настолько велика, что при закрытом положении клапана (24) сопротивление текучей среде кольцевого зазора меньше сопротивления текучей среде возвратного трубопровода.
25. Ортопедический гидравлический амортизатор по п.24, отличающийся тем, что клапан (24) и кольцевой зазор (26) выполнены так, что когда клапан (24) находится в закрытом положении, а поршень (16) вдвинут в вытеснительную камеру (14), то, по существу, вся текучая среда (20) протекает из вытеснительной камеры (14) через кольцевой зазор (26) в резервуар (18) для текучей среды.
26. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что текучая среда является гидравлической жидкостью (20), вязкость которой, по существу, не зависит от магнитного поля и/или электрического поля.
27. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что корпус (12) цилиндра и/или поршень (16) выполнены из пластмассы, в частности, литьем под давлением.
28. Ортопедический гидравлический амортизатор по п.23 или 27, отличающийся тем, что поршень (16) выполнен с изменяющимся вдоль его продольной протяженности наружным диаметром.
29. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что вытеснительная камера (14) выполнена с изменяющимся вдоль ее продольной протяженности внутренним диаметром.
30. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что резервуар (18) для текучей среды предназначен для хранения текучей среды (20), по существу, всегда не под давлением.
31. Ортопедический гидравлический амортизатор по п.30, отличающийся тем, что резервуар для текучей среды является сильфоном (18).
32. Ортопедический гидравлический амортизатор по п.31, отличающийся тем, что резервуар (18) для текучей среды окружен гильзой (13), в частности, пластмассовой гильзой.
33. Ортопедический гидравлический амортизатор по п.32, отличающийся тем, что гильза (13) имеет, по меньшей мере, одно выравнивающее давление отверстие.
34. Ортопедический гидравлический амортизатор по п.30, отличающийся тем, что
- поршень (16) имеет погружаемый участок (Е), который может погружаться в корпус (12) цилиндра, и свободный участок (А), который не может погружаться в корпус (12) цилиндра, и
- сильфон (18) закреплен на корпусе (12) цилиндра и на свободном участке (А).
35. Ортопедический гидравлический амортизатор по п.22, отличающийся тем, что он
- содержит расположенный снаружи корпуса (12) цилиндра магнит (56), и
- клапан (24) выполнен с возможностью приведения из открытого положения в закрытое положение и обратно с помощью магнита (56).
36. Ортопедический гидравлический амортизатор по п.35, отличающийся тем, что магнит является электромагнитом (56), который взаимодействует с клапанным шариком (34) клапана (24).
37. Ортопедический гидравлический амортизатор по п.35, отличающийся тем, что магнит является установленным с возможностью перемещения с помощью расположенного снаружи корпуса (12) цилиндра исполнительного механизма постоянным магнитом, который взаимодействует с клапанным шариком (34) клапана (24).
| WO 2007016408 A1, 02.08.2007 | |||
| DE 3028608 A1, 02.11.1982 | |||
| DE 102005020188 A1, 09.11.2006 | |||
| УЛУЧШЕННОЕ СОПРЯЖЕНИЕ СТОПОРА ПОТОКА ДЛЯ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2002 |
|
RU2286179C2 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| Коленный узел к протезу бедра | 1990 |
|
SU1745236A1 |

