Изобретение касается ортопедического устройства с гидравлическим амортизирующим блок, с клапаном с седлом клапана и с телом клапана, на которое воздействуют запирающей силой в направлении седла клапана с помощью поджатой пружины, и с обтекаемым соединением между гидравлическим амортизирующим блоком и седлом клапана.
Ортопедические устройства, в частности, протезы или ортезы, могут быть оснащены гидравлическим амортизирующим блоком, имеющим поршень и цилиндр, при этом поршень, как правило, подразделяет цилиндр на камеру вытяжения и камеру сгибания, если гидравлическое амортизирующее блок расположено на шарнире. В зависимости от вытягивающего или сгибающего движения гидравлическая текучая среда движется из одной камеры в другую. При иной компоновке обе камеры обозначаются как камеры сгибания и камеры вытяжения. У гидравлически амортизируемых шарнирных блоков регулируемые клапаны часто выполнены в виде клапана потока, с помощью которых в соответствующем канале потока могут быть уставлены сопротивления с возможностью изменения или статично. Клапаны потока могут быть регулируемыми вручную или мотором. Кроме того, в гидравлических амортизирующих блоках расположены обратные клапаны, запирающие поток текучей среды в зависимости от направления потока. Чтобы удержать тело клапана в заданном положении, эти клапаны, как правило, нагружены с помощью пружины, которая поджимает тело клапана в седло клапана. Чтобы гидравлическая текучая среда могла протекать через обратный клапан, противоположно направлению усилия пружины должно быть приложено давление, чтобы тело клапана поднялось с седла клапана.
В гидравлических амортизирующих блоках частично встроены так называемые предохранительные клапаны, открывающиеся при превышении максимально допустимого давления, чтобы защитить ортопедическое устройство, в частности, гидравлический амортизирующий блок, от механических повреждений или также пациента от травм. Предохранительный клапан является защитой от сверхнагрузки, который открывается при достижении предварительно заданного давления. В частности, у ортопедических устройств с гидравлическим амортизирующим блоком ограничено установочное пространство. Вместе с тем, с помощью маленьких пружин клапана, которые напрямую или не напрямую воздействуют с силой поджатия на тело клапана, должны быть применены большие усилия. В частности, при форме исполнения пружины клапана как механической винтовой пружины или спиральной пружины существует проблема того, что имеет место большой разброс при изготовлении, поэтому требуемое усилие открывания клапана может производиться только через апробирование большого числа пружин для клапана.
Отсюда задачей данного изобретения является предоставление ортопедического устройства, у которого всегда имеется требуемое усилие открывания клапана.
Согласно изобретению, эта задача решается с помощью устройства с признаками независимого пункта формулы изобретения. Предпочтительные формы исполнения и усовершенствования изобретения раскрыты в зависимых пунктах, в описании и фигурах.
Соответствующее изобретению ортопедическое устройство с гидравлическим амортизирующим блоком, с клапаном с седлом клапана и телом клапана, на которое воздействуют запирающим усилием в направлении седла клапана с помощью поджатой пружины клапана и с обтекаемым соединением между гидравлическим амортизирующим блоком и седлом клапана, предусматривает, чтобы клапан имел регулирующий блок для регулировки поджатия, которое имеет пружина клапана. В то время как у клапанов избыточного давления из уровня техники имеет место фиксированное регулирование и большая вариация соответствующих сил открывания из-за различной жесткости пружин, то с помощью соответствующего изобретению устройства возможно и при наличии различной жесткости соответствующих пружин клапана предоставить постоянно одно и то же усилие запирания тела клапана, поэтому, не зависимо от допусков при изготовлении пружин клапана, может быть предоставлено постоянное качество ортопедического устройства. Кроме этого, возможно предпринимать индивидуализацию ортопедического устройства под соответствующего пользователя или пациента. Например, у ортопедических устройств, таких как ортезы или протезы нижних конечностей, необходимое запирающее усилие может меняться с весом тела или с весом нагрузки на соответствующий шарнир. Легкому пациенту может требоваться меньшее усилие пружины для открывания клапана, поэтому шарнирное приспособление ослабляется, если имеет место характерная нагрузка, в то время как у тяжелого пациента или при большей нагрузке, например, если пациент несет груз, может быть установлено более высокое запирающее усилие. Установление запирающего усилия путем изменения поджатия пружины клапана позволяет, к тому же, привести подгонку клапана к различным ортопедическим устройствам с различными целями использования и, например, различными размерами моделей.
Усовершенствование изобретения предусматривает, чтобы регулирующий блок имел резьбовую тягу, с помощью которой пружина клапана поджата. Сама пружина клапана может быть выполнена как механическая пружина, такая как спиральная пружина или винтовая пружина и может, в частности, с помощью силы давления или также силы натяга давить или тянуть тело клапана в седло клапана. Точно также возможно предусмотреть альтернативные пружины клапана, например, эластомерный элемент или предварительно напряженный сжимаемый объем, например, наполненный газом пузырь. Тело клапана может находиться в прямом контакте с пружиной клапана, альтернативно запирающее усилие тела клапана может быть наложено через несущий элемент или предпочтительно несжимаемую текучую среду на тело клапана, чтобы прижать тело клапана в седло клапана.
Регулирующий блок может иметь связанный с пружиной клапана держатель пружины клапана, который расположен в корпусе и на котором выполнена первая резьба, которая находится в зацеплении со второй резьбой, расположенной в корпусе. Регулирующий блок, по меньшей мере, вместе с пружиной клапана и с телом клапана вместе с держателем пружины клапана может быть помещено в отдельный корпус и может быть выполнено как модуль. Альтернативно корпус может быть частью корпуса ортопедического устройства, например, каналом потока, в котором расположена или сформирована внутренняя резьба, которая может быть приведена в зацепление с резьбой держателя пружины клапана, в котором поджата или ослаблена пружина клапана. Держатель пружины клапана может быть сформирован, например, как цапфа, втулка или подобное приемное приспособление, на котором или в котором размещена пружина клапана и с помощью которого пружина клапана может быть поджата или ослаблена. В зависимости от того, в каком направлении движется регулирующий блок, с помощью резьбовой тяги пружина клапана поджимается или ослабляется.
Тело клапана может быть поджато с усилием поджатия в направлении седла клапана, которое может иметь близкую к желаемой величину. В зависимости от того, какое запирающее усилие должно быть предоставлено, чтобы защитить гидравлическую систему или гидравлический амортизирующий блок подогнать под соответствующего пациента или соответствующее условие использования, усилие поджатия может быть установлено и подогнано регулирующим блоком. Предпочтительно усилие поджатия является плавно регулируемым, чтобы иметь возможность выравнивать отклонения или разбросы при изготовлении пружин и иметь возможность предпринимать точные подгонки под пользователя и/или под цели использования. Благодаря плавной регулировке могут быть значительно сокращены разбросы, и усилие поджатия может быть установлено с очень малыми отклонениями от заданного значения. Отклонения от заданного значения составляют предпочтительно менее 10%, в частности, предпочтительно менее 5%, например, при заданном значении 9 кН усилие поджатия может быть установлено с точностью ±0,4 кН.
Регулирующее блок может иметь регулировочные маркировки, поэтому пользователь или механик-ортопед может установить соответственно требуемое запирающее усилие, руководствуясь регулировочными маркировками. После установки пружины на тело клапана может быть наложено проверочное усилие. Если клапан открывается до достижения установленного проверочного усилия, то поджатие повышают, если клапан еще не открывается, то поджатие пружины уменьшают и, тем самым, снижают и запирающее усилие. Ступенчатым снижением соответственно наложенного проверочного усилия и наложением соответствующей регулировочной маркировки при достижении требуемого проверочного усилия для каждой пружины индивидуально может быть нанесена соответствующая регулировочная маркировка или соответствующие регулировочные маркировки.
Регулирующий блок имеет предпочтительно элемент геометрического замыкания, через который регулирующий блок приводится в действие. Элемент геометрического замыкания, такой как, например, шлиц, крестовой шлиц, многоугольный профиль, насадка «звездочка», внутренний шестигранник или ответный выступ, может осуществлять передачу усилия от инструмента или моторного привода на регулирующий блок.
В усовершенствовании изобретения предусмотрено, чтобы регулирующий блок имел моторный привод и связанный с моторным приводом блок управления для управления моторным приводом. Привод выполнен, в частности, как электромоторный привод. Возможны и предусмотрены альтернативные моторные приводные устройства для регулировки поджатия пружины клапана. С помощью моторного привода могут быть предприняты без прямого доступа к регулирующему блоку путем активации или деактивации привода соответственно требуемые регулировки в соответственно требуемом направлении.
Предпочтительно ортопедическое устройство имеет связанный с блоком управления орган управления и/или коммуникационный модуль для управления моторным приводом, поэтому посредством пульта управления или органа управления на ортезе, протезе или на инвалидном кресле, или на другом ортопедическом устройстве можно удобно добиться регулировки соответствующего поджатия пружины.
Усовершенствование изобретения предусматривает, чтобы ортопедическое устройство имело по меньшей мере один датчик, связанный с блоком управления. Посредством датчика возможно снабдить блок управления данными пользователя или также эксплуатационными данными ортопедического устройства, чтобы иметь возможность установить поджатие пружины и, таким образом, запирающее давление или давление, с которого тело клапана открывает клапан. Прямой установкой пользователем амортизирующего блока или техником-ортопедом с помощью ручной регулировки или с помощью моторной регулировки через интерфейс или орган управления можно на пользователе автоматически проводить регулирование непосредственно по датчику для каждого эксплуатационного состояния или также для специальной деятельности, или также для изменений. Для специальной деятельности, такой как спорт, несение веса или для специальных функций, таких как спуск с горы или восхождение по лестнице может быть целесообразным установить особые запирающие давления или граничные значения, чтобы гидравлическая система при пиках нагрузки не получила от повреждений, или чтобы препятствовать тому, чтобы слишком большие усилия передавались через протезные или ортезные устройства на пользователя. Тогда соответствующий шарнир или соответствующее ортопедическое устройство при достижении граничного давления ослабляется, у шарниров нижней конечности преимущественно при сгибании колена или сустава лодыжки, у шарнира лодыжки, к тому же, также при движении вытягивания.
Активным управлением с помощью блока управления, регулирующего поджатие в зависимости по меньшей мере от одного показания датчика может быть проведена улучшенная индивидуализация и подгонка под пациента или под соответствующую деятельность.
В усовершенствовании изобретения предусмотрено, чтобы блок управления выполнен с возможностью определения веса тела и/или значения параметра движения с помощью по меньшей мере одного датчика, расчета из определенного значения или определенных значений по меньшей мере одного параметра управления для привода и автоматического активирования привода для регулировки поджатия пружины клапана. В частности, весовая нагрузка может быть измерена, например, с помощью осевого силового датчика, также ускорения, моменты или положения в пространстве, на основании которых автоматически регулируется клапан.
Далее примеры исполнения изобретения более подробно разъясняются с помощью приложенных фигур. Показывают:
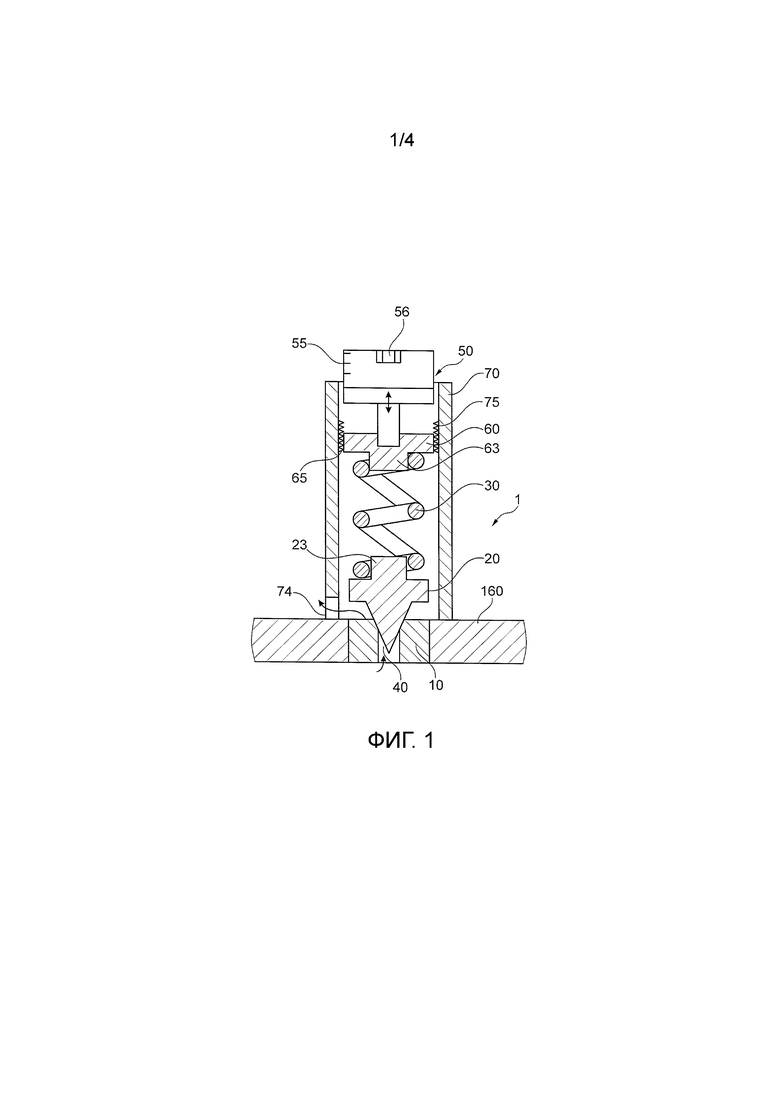
Фиг. 1 - схематичное изображение в разрезе клапана;
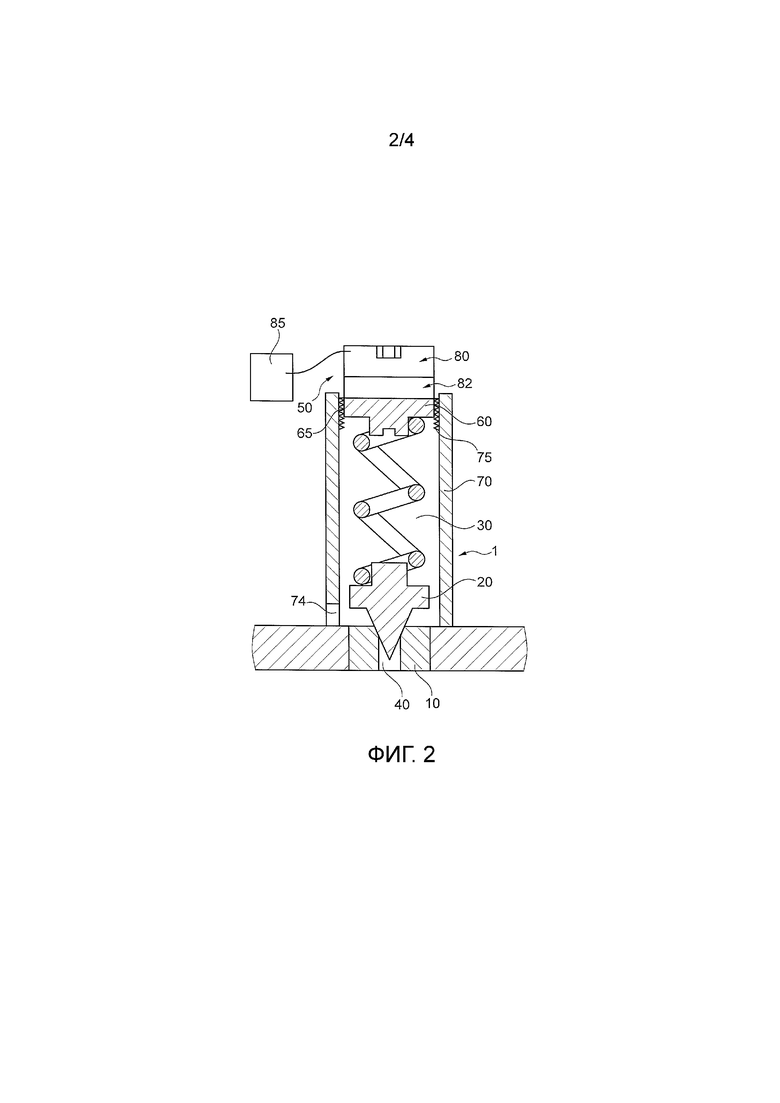
Фиг. 2 - вариант Фиг. 1 с моторным регулирующим блоком;
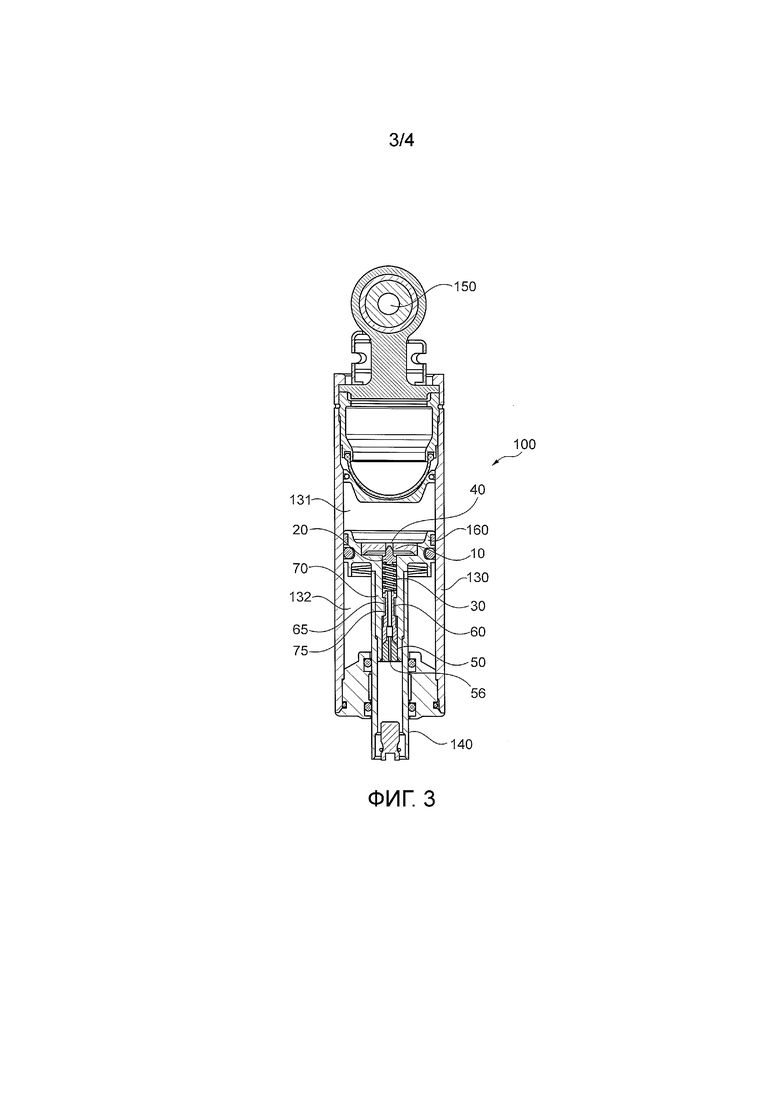
Фиг. 3 - изображение в разрезе гидравлического амортизатора с клапаном; а также
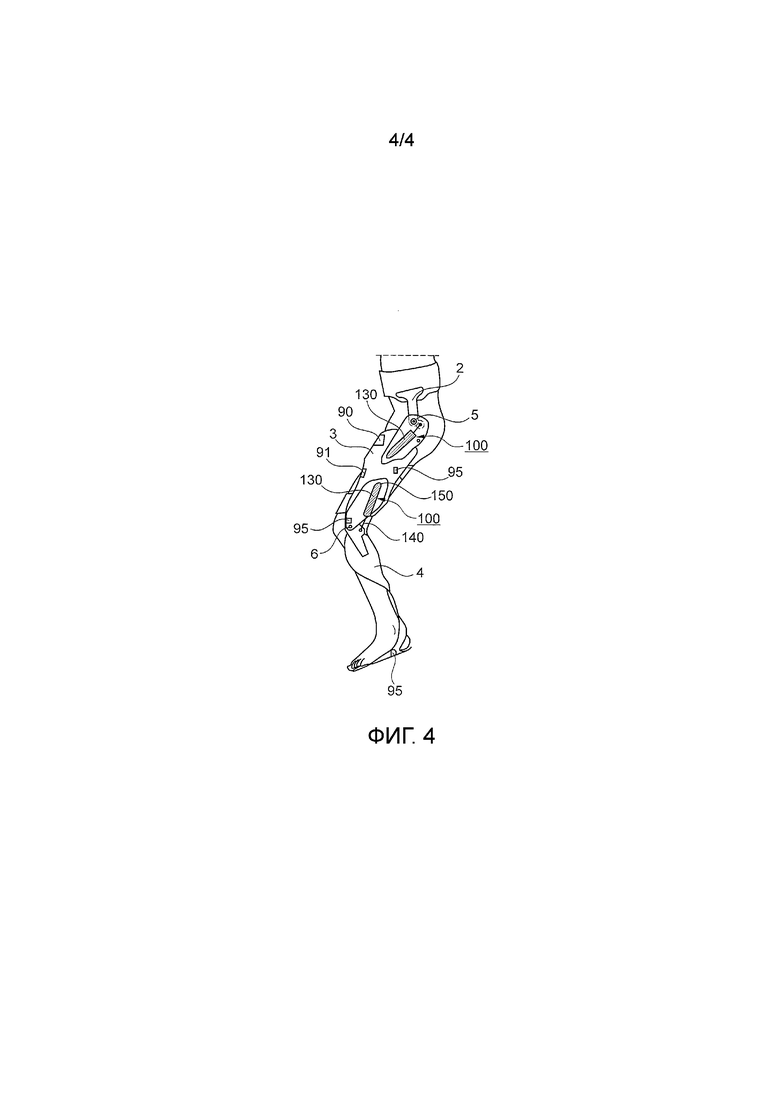
Фиг. 4 - схематичное изображение примера использования.
На Фиг. 1 показан в схематичном изображении в разрезе клапан 1 с седлом 10 клапана, расположенным в части гидравлического амортизирующего блока или в другой гидравлической системе. Седло 10 клапана на изображенном примере исполнения расположено в гидравлическом поршне 160, который позднее будет пояснен подробнее. В седле 10 клапана сформировано сквозное отверстие 40 или проход, соединяющий сторону высокого давления со стороной низкого давления. Проход 40 заперт телом 20 клапана. На изображенном примере исполнения тело 20 клапана имеет конусную вершину, выступающую в проход 40 и запирающую его. В седле 10 клапана могут быть сформированы скосы прилегания для достижения увеличения поверхности прилегания тела 20 клапана к седлу или в седле 10 клапана. Телом 20 клапана с помощью пружины 30, которая на изображенном примере исполнения сформирована как винтовая пружина или спиральная пружина, воздействует с силой поджатия на седло 10 клапана. Тело 20 клапана имеет выступ или уступ 23 в виде пальца, вокруг которого расположена винтовая пружина 30. Уступ 23 служит направляющей для винтовой пружины 30.
Винтовая пружина 30 вместе с телом 20 клапана направлены во втулке 70, расположенной на поршне 160. Втулка 70 может быть частью поршня 160 или закреплена на нем. Втулка 70 окружает как седло 10 клапана, так и тело 20 клапана и пружину 30 и имеет выпуск 74, через который может выходить гидравлическая текучая среда или, соответственно, пневматическая текучая среда со стороны высокого давления через проход 40 при открытом клапане 1. Внутри втулки 70 расположен держатель 60 пружины клапана, также имеющий уступ 63 в виде пальца, вокруг которого установлена винтовая пружина 30. Держатель 60 пружины клапана на своей внешней стороне имеет резьбу 65, зацепляющуюся с внутренней резьбой 75 на внутренней стенке втулки 70. По резьбе 65, 75 путем проворота держателя 60 клапана в одном или другом направлении можно сдавить или ослабить пружину 30. Если держатель 60 пружины клапана перемещается в направлении тела 20 клапана, то пружина 30 сжимается, и запирающее усилие, с которым тело 20 клапана давит на седло 10 клапана и запирает проход 40, повышается. Если держатель 60 пружины клапана перемещается прочь от тела 20 клапана, то пружина 30 ослабляется, и запирающее давление уменьшается. Это означает, что только уменьшенное давление требуется на стороне высокого давления, чтобы тело 20 клапана поднять с седла 10 клапана и открыть проход 40, поэтому гидравлическая текучая среда и/или пневматическая текучая среда может проходить от стороны высокого давления и выходить через выпуск 74. Выпуск 74 может быть связан уравнительной емкостью, стороной высокого давления или при помощи соединительной проводки с остальной гидравлической системой.
По центру внутри держателя 60 пружины клапана расположены некруглая выемка, в которую зацепляется имеющая соответствующую форму цапфа регулирующего блока 50. На обращенной от держателя 60 пружины клапана стороне регулирующего блока 50 сформирован элемент 56 геометрического замыкания в форме внутренней шестигранной выемки, в которую вставляется имеющий соответствующую форму инструмент. Путем проворота регулирующего блока 50 в одном или другом направлении через соединение с геометрическим замыканием с держателем 60 пружины клапана достигается ослабление или повышение поджатия пружины 30 клапана. На внешней стороне регулирующего блока 50 расположены маркировки 55, по которым лицо может распознать, насколько выполнено поджатие. По маркировкам могут быть распознаны степени поджатия, поэтому усилие поджатия является регулируемым не только качественно, но и количественно.
Фиг. 2 показывает вариант расположения клапана по Фиг. 1, при этом вместо механического, ручного регулирующего блока 50 при помощи инструмента с держателем 60 пружины клапана связан приводной от мотора регулирующий блок 50. Принципиальная механическая конструкция с седлом 10 клапана, телом 20 клапана, пружиной 30 поджатия и поджатием по резьбе 65 75 осталась неизменной. На удаленном от тела 20 клапана конце держателя 60 пружины клапана расположен привод 80, в частности, электромоторный привод 80, связанный через редуктор 82 с держателем 60 пружины клапана. Моторный привод 80 связан с управляющим блоком 85, который, в свою очередь, может быть связан по меньшей мере с одним датчиком, органом управления или коммуникационным устройством, чтобы с помощью соответствующих управляющих сигналов приводить в действие мотор 80 в одном или другом направлении. Путем проворота держателя 60 пружины клапана 60 внутри втулки 80 с помощью резьбовой тяги вызывают аксиальное перемещение держателя 60 пружины клапана в направлении тела 20 клапана или прочь от него и, тем самым, вытекающее из этого повышение поджатия или ослабление пружины 30.
Редуктор 82 может быть расположен или выполнен, в частности, как привод с ходовым винтом, поэтому сам мотор 80 остается стационарным и приводит в движение лишь редуктор 82 через приводной вал, чтобы с помощью держателя 60 пружины клапана вызывать сжатие или ослабление пружины 30. Другие регулирующие блоки 50 также могут быть предусмотрены, например, блоки только линейного перемещения, обходящиеся без повышающей винтовой передачи. Блок 85 управления может быть связан кабелем или также без кабеля с приводом 80.
Фиг. 3 показывает вид в разрезе гидравлической системы в форме гидравлического амортизирующего блока 100, который может быть снабжен блоком 85 управления из фиг. 2. Гидравлический исполнительный механизм 100 имеет корпус 130, на котором закреплено установочное гнездо 150 для крепления корпуса, например, на ортезе или протезе. Внутри корпуса 130 сформирован цилиндр, в котором на поршневом штоке 140 расположен с возможностью перемещения в продольном направлении гидравлический поршень 160. Гидравлический поршень 160 отделяет камеру 131 сгибания от камеры 132 вытягивания. На обращенном от поршня 160 конце поршневого штока 140 может быть предусмотрено дополнительное установочное устройство, аналогичное установочному гнезду 150 на корпусе 130, чтобы иметь возможность крепить гидравлический исполнительный механизм 100, например, на нижней части или на верхней части ортеза или протеза.
Внутри перемещаемого в продольном направлении поршня 160 сформировано седло 10 клапана, в котором установлено тело 20 клапана. На стороне поршневого штока поршня 160 в выемке, в частности, цилиндрическом отверстии, установлено, в поперечном сечении также имеющее форму круга тело 20 клапана и с помощью пружины 30 клапана нагружено в направлении на седло 10 клапана. Внутри втулки 70, которая в примере исполнения является частью поршня 160 и окружает отверстие, также расположен держатель 60 пружины клапана, имеющий на своей внешней стороне внешнюю резьбу 65, выполненную соответственно внутренней резьбой 75 во втулке 70. С помощью регулирующего блока 50, имеющего на своем заднем конце элемент 56 геометрического замыкания в форме некруглой или угловой выемки, с помощью поршневого штока 140 может осуществляться ручная регулировка поджатия пружины перемещением регулирующего блока 50 и, таким образом, также перемещаемый аксиально с помощью резьбовой тяги держатель 60 пружины клапана. В зависимости от направления вращения ослабляется или натягивается пружина 30. Если в ходе работы гидравлического амортизатора 100 при сгибательном движении возникает пик перегрузки в камере 131 сгибания, открывается клапан 1 выдавливанием тела 20 клапана из седла 10 клапана против силы пружины от пружины 30, поэтому открывается проход 40, и гидравлическая текучая среда может перетекать от камеры 131 сгибания через не изображенные каналы в камеру 132 вытягивания. В принципе, также возможно поменять местами камеру 131 сгибания и камеру 132 вытягивания, поэтому при высоком давлении при движении вытягивания клапан 1 может быть управляемо открыт. Путем регулируемости пружины 30 поджатия возможно, с одной стороны, установить давление открывания тела 20 клапана более точно, а, с другой стороны, регулировкой поджатия во время эксплуатации принимать во внимание различные действия, различные ситуации при ходьбе или изменения в пользователе ортопедического устройства и предпринимать соответствующую подгонку.
Пример исполнения изобретения изображен на Фиг. 4, на которой изображен ортез для нижней конечности. С помощью тазового пояса или тазового присоединения 2 происходит закрепление ортеза на туловище пациента. Через ось 5 шарнира бедренная накладка 3, закрепляемая на бедре ремнями, как устройствами крепления, закреплена на тазовом присоединении 2. Дистально к бедренной накладке 3 накладка 4 на голень с опорой для стопы размещена на шарнире по оси 6 поворота на бедренной накладке 3. Всего предусмотрено два гидравлических исполнительных механизма 100, которые расположены соответственно между верхней частью и нижней частью ортеза. Между тазовым присоединением 2 и бедренной накладкой 3 закреплен гидравлический исполнительный механизм 100 таким образом, чтобы при повороте вокруг оси 5 поворота поршневой шток 140 заходил в корпус 130, или соответственно, выходил. Соответственно второй гидравлический исполнительный механизм 100 с корпусом установлен с помощью установочного гнезда 150 на бедренной накладке и через поршневой шток 140 и место крепления на накладке для голени или на части голени 4. И здесь поворот вокруг оси 6 поворота ведет к относительному движению между поршневым штоком 140 и корпусом 130 и, таким образом, к движению поршня 160 внутри корпуса 130. На ортезе расположены датчики 95, например, датчики давления, датчики ускорения, силовые датчики или угловые датчики, связанные с блоком 85 управления. На изображенном примере исполнения на бедренной накладке 3 также расположен орган 90 управления, н-р, в форме сенсорной панели (Touch Screens), которой можно воздействовать на блок 85 управления и, тем самым, моторный привод 80 для регулировки поджатия клапана 1. Дополнительно на ортезе расположен коммуникационный интерфейс 91, на примере исполнения - на бедренной накладке 3, чтобы, например, через центральное управляющее устройство загружать обновление программного обеспечения или получать данные и энергию и передавать на ортопедическое устройство с гидравлическим модулем или производить анализ данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКОЕ СУСТАВНОЕ УСТРОЙСТВО | 2019 |
|
RU2803115C2 |
| ОРТОПЕДИЧЕСКИЙ ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2008 |
|
RU2480182C2 |
| ОРТОПЕДИЧЕСКИЙ КОЛЕННЫЙ СУСТАВ, А ТАКЖЕ СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ КОЛЕННЫМ СУСТАВОМ | 2009 |
|
RU2488367C2 |
| ПАССИВНОЕ ОРТОПЕДИЧЕСКОЕ ВСПОМОГАТЕЛЬНОЕ СРЕДСТВО В ВИДЕ ПРОТЕЗА ИЛИ ОРТЕЗА СТОПЫ | 2009 |
|
RU2473322C2 |
| ШАРНИРНОЕ УСТРОЙСТВО | 2018 |
|
RU2768455C2 |
| ОРТОПЕДИЧЕСКОЕ ТЕХНИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2459596C2 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2652893C2 |
| СПОСОБ УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ФАЗЫ ОСТАНОВКИ ИСКУССТВЕННОГО КОЛЕННОГО СУСТАВА | 2016 |
|
RU2715683C2 |
| ГИДРАВЛИЧЕСКОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОТЕЗНОГО ИЛИ ОРТЕЗНОГО КОЛЕННОГО ШАРНИРА | 2019 |
|
RU2778722C2 |
| ОРТОПЕДИЧЕСКАЯ ЧАСТЬ СТОПЫ И СПОСОБ УПРАВЛЕНИЯ ИСКУССТВЕННОЙ СТОПОЙ | 2009 |
|
RU2473323C2 |
Группа изобретений относится к медицине. Протез содержит гидравлический амортизирующий блок, клапан с седлом клапана и телом клапана, на которое воздействуют запирающим усилием в направлении седла клапана с помощью поджатой пружины клапана, и обтекаемое соединение между гидравлическим амортизирующим блоком и седлом клапана. Клапан имеет регулирующий блок для регулировки поджатия пружины клапана, который имеет моторный привод и связанный с моторным приводом блок управления для управления моторным приводом, а также по меньшей мере один датчик, связанный с блоком управления. Блок управления выполнен с возможностью регулирования поджатия пружины в зависимости по меньшей мере от одного показания датчика. Ортез содержит гидравлический амортизирующий блок, клапан с седлом клапана и телом клапана, на которое воздействуют запирающим усилием в направлении седла клапана с помощью поджатой пружины клапана, и обтекаемое соединение между гидравлическим амортизирующим блоком и седлом клапана. Клапан имеет регулирующий блок для регулировки поджатия пружины клапана, который имеет моторный привод и связанный с моторным приводом блок управления для управления моторным приводом, а также по меньшей мере один датчик, связанный с блоком управления. Блок управления выполнен с возможностью регулирования поджатия пружины в зависимости по меньшей мере от одного показания датчика. Изобретения обеспечивают всегда требуемое усилие клапана. 2 н. и 14 з.п. ф-лы, 4 ил.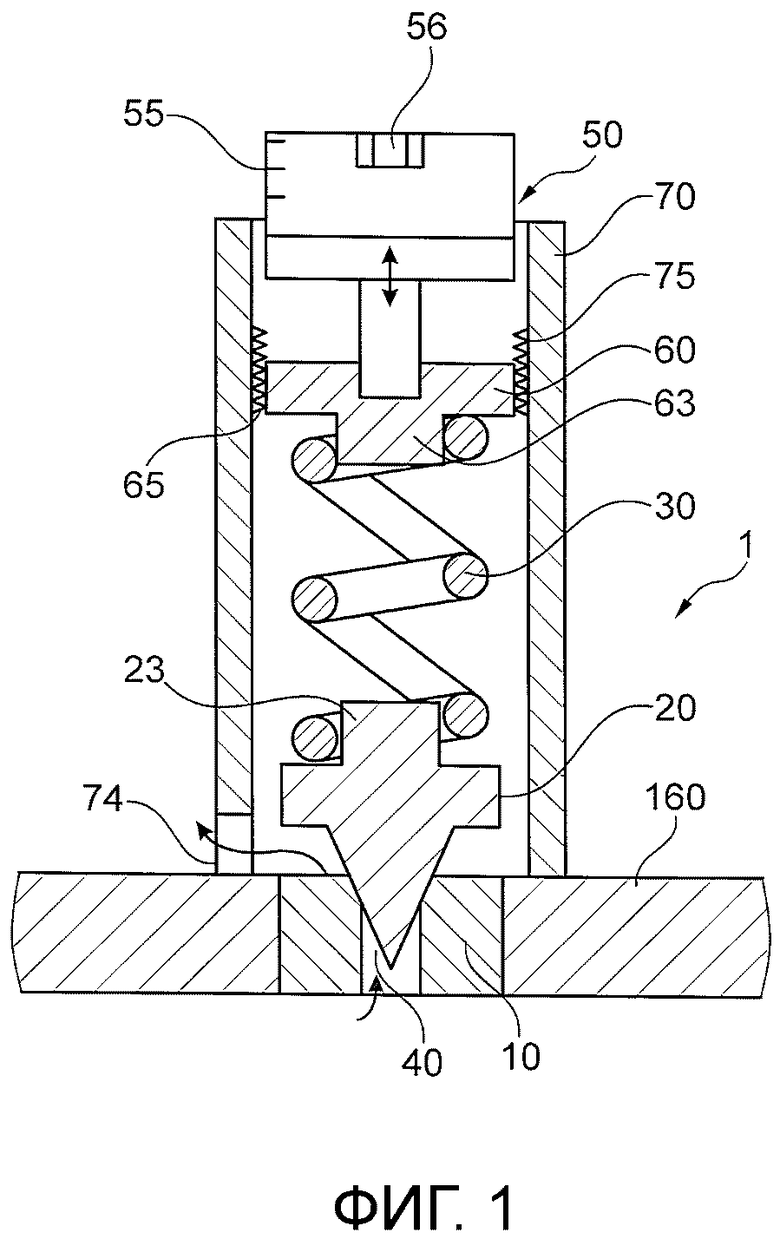
1. Протез, содержащий
гидравлический амортизирующий блок,
клапан (1) с седлом (10) клапана и телом (20) клапана, на которое воздействуют запирающим усилием в направлении седла (10) клапана с помощью поджатой пружины (30) клапана, и
обтекаемое соединение (40) между гидравлическим амортизирующим блоком и седлом (10) клапана,
причем
клапан (1) имеет регулирующий блок (50) для регулировки поджатия пружины (30) клапана, отличающийся тем, что регулирующий блок (50) имеет моторный привод (80) и связанный с моторным приводом (80) блок (85) управления для управления моторным приводом (80), а также по меньшей мере один датчик (95), связанный с блоком (85) управления, и блок (85) управления выполнен с возможностью регулирования поджатия пружины в зависимости по меньшей мере от одного показания датчика.
2. Протез по п. 1, отличающийся тем, что регулирующий блок (50) имеет резьбовую тягу.
3. Протез по п. 2, отличающийся тем, что регулирующий блок (50) имеет связанный с пружиной (30) клапана держатель (60) пружины клапана, который расположен в корпусе (70) и на котором выполнена первая резьба (65), находящаяся в зацеплении со второй резьбой (75), расположенной в корпусе (70).
4. Протез по одному из предыдущих пунктов, отличающийся тем, что усилие поджатия на тело (20) клапана является плавно регулируемым.
5. Протез по одному из предыдущих пунктов, отличающийся тем, что регулирующий блок (50) имеет регулировочные маркировки (55).
6. Протез по одному из предыдущих пунктов, отличающийся тем, что регулирующий блок (50) имеет элемент (56) геометрического замыкания, которым регулирующий блок (50) приводится в действие.
7. Протез по п. 1, отличающийся тем, что ортопедическое устройство имеет связанный с блоком управления (85) орган (90) управления и/или коммуникационный интерфейс (91) для управления моторным приводом (80).
8. Протез по п. 1, отличающийся тем, что блок (85) управления выполнен с возможностью определения веса тела и/или значения параметра движения пользователя с помощью по меньшей мере одного датчика (95), расчета по меньшей мере одного управляющего параметра для привода (80) из определенного значения или определенных значений и автоматического активирования привода (80) для регулировки поджатия пружины (30) клапана.
9. Ортез, содержащий
гидравлический амортизирующий блок,
клапан (1) с седлом (10) клапана и телом (20) клапана, на которое воздействуют запирающим усилием в направлении седла (10) клапана с помощью поджатой пружины (30) клапана, и
обтекаемое соединение (40) между гидравлическим амортизирующим блоком и седлом (10) клапана,
причем
клапан (1) имеет регулирующий блок (50) для регулировки поджатия пружины (30) клапана, отличающийся тем, что регулирующий блок (50) имеет моторный привод (80) и связанный с моторным приводом (80) блок (85) управления для управления моторным приводом (80), а также по меньшей мере один датчик (95), связанный с блоком (85) управления, и блок (85) управления выполнен с возможностью регулирования поджатия пружины в зависимости по меньшей мере от одного показания датчика.
10. Ортез по п. 9, отличающийся тем, что регулирующий блок (50) имеет резьбовую тягу.
11. Ортез по п. 10, отличающийся тем, что регулирующий блок (50) имеет связанный с пружиной (30) клапана держатель (60) пружины клапана, который расположен в корпусе (70) и на котором выполнена первая резьба (65), находящаяся в зацеплении со второй резьбой (75), расположенной в корпусе (70).
12. Ортез по одному из пп. 9-11, отличающийся тем, что усилие поджатия на тело (20) клапана является плавно регулируемым.
13. Ортез по одному из пп. 9-12, отличающийся тем, что регулирующий блок (50) имеет регулировочные маркировки (55).
14. Ортез по одному из пп. 9-13, отличающийся тем, что регулирующий блок (50) имеет элемент (56) геометрического замыкания, которым регулирующий блок (50) приводится в действие.
15. Ортез по п. 9, отличающийся тем, что ортопедическое устройство имеет связанный с блоком управления (85) орган (90) управления и/или коммуникационный интерфейс (91) для управления моторным приводом (80).
16. Ортез по п. 9, отличающийся тем, что блок (85) управления выполнен с возможностью определения веса тела и/или значения параметра движения пользователя с помощью по меньшей мере одного датчика (95), расчета по меньшей мере одного управляющего параметра для привода (80) из определенного значения или определенных значений и автоматического активирования привода (80) для регулировки поджатия пружины (30) клапана.
| US 6706074 B1, 16.03.2004 | |||
| Тормозной станок для размотки провода воздушной линии передачи энергии | 1935 |
|
SU47732A1 |
| US 8814948 B2, 26.08.2014 | |||
| US 5888212 A1, 30.03.1999 | |||
| WO 2017050552 A1, 30.03.2017 | |||
| US 20060259153 A1, 16.11.2006 | |||
| Турбина внутреннего горения | 1929 |
|
SU19408A1 |

