Область техники
Данное изобретение относится к гибридным транспортным средствам, в частности к гибридному транспортному средству, имеющему множество режимов движения.
Уровень техники
В последние годы - ввиду проблем окружающей среды - большое внимание уделяется гибридным транспортным средствам. Гибридное транспортное средство имеет множество встроенных источников энергии. Гибридное транспортное средство, включающее в себя в качестве источника движущей силы энергоаккумулирующее устройство (батарею, конденсатор и т.п.) и электродвигатель в дополнение к обычному двигателю, уже нашло практическое применение.
Также привлекает к себе внимание автомобиль на топливных элементах, включающий в себя топливный элемент в качестве источника питания. В широком смысле, транспортное средство, включающее в себя энергоаккумулирующее устройство, такое как батарея и конденсатор, в качестве источника энергии в дополнение к топливному элементу, можно считать гибридным транспортным средством, включающим в себя множество источников энергии.
Также известно гибридное транспортное средство, выполненное с возможностью зарядки извне, что позволяет заряжать энергоаккумулирующее устройство посредством внешнего источника энергии. Такое гибридное транспортное средство, выполненное с возможностью зарядки извне, выгодно тем, что частота остановок на дозаправку, необходимую для пополнения запаса топлива, будет снижена, если можно будет заряжать энергоаккумулирующее устройство, например, от выпускаемого промышленностью бытового источника энергии.
В выложенном патенте Японии № 2007-62639 (патентном источнике 1) описано гибридное транспортное средство, которое может заставить источник энергии работать на пониженной рабочей частоте. Это гибридное транспортное средством включает в себя в качестве источника энергии двигатель, а также энергоаккумулирующее устройство и электродвигатель-генератор. Когда переключатель перехода в режим гибридного транспортного средства (ГТС) переводится во включенное состояние при движении в режиме электромобиля (ЭМ), в котором транспортное средство движется, используя в качестве источника энергии только энергоаккумулирующее устройство и электродвигатель-генератор, устройство управления переключает режим движения в режим гибридного транспортного средства (ГТС), в котором транспортное средство движется также с приводом от двигателя.
Патентный источник 1: выложенный патент Японии № 2007-62639.
Задачи, решаемые изобретением
В соответствии с конфигурацией, описанной в выложенном патенте Японии № 2007-62639 (патентном источнике 1), устройство управления определяет, задействовал ли водитель переключатель для изменения режима движения, в соответствии с сигналом, выдаваемым из этого переключателя. В частности, устройство управления определяет, переключатель задействован, когда напряжение сигнала находится на высоком (логическом высоком) уровне. Вместе с тем, когда в шине управления, по которой передается сигнал из переключателя, возникает ошибка, существует вероятность, что устройство управления не сможет должным образом переключить режим движения. Например, устройство управления может ошибочно переключить режим движения.
Задачей данного изобретения является создание гибридного транспортного средства, которое может избегать, когда возникает ошибка в шине управления, по которой передается сигнал, указывающий переключение режима движения, непрерывного движения в режиме движения, отличающемся от надлежащего режима движения.
Средства решения задач
Данное изобретение направлено на создание гибридного транспортного средства, включающего в себя первый и второй источники энергии, конфигурация каждого из которых обеспечивает привод гибридного транспортного средства в движение, шину управления, первый узел, имеющий первое напряжение, второй узел, имеющий второе напряжение, переключатель и устройство управления. Переключатель задает уровень напряжения шины управления на первом уровне, соответствующем первому напряжению, за счет электрического соединения шины управления с первым узлом, когда ручная операция не осуществляется. Переключатель задает уровень напряжения шины управления на втором уровне, соответствующем второму напряжению, за счет электрического соединения шины управления со вторым узлом в течение периода, во время которого ручная операция осуществляется. Устройство управления переключает режим движения гибридного транспортного средства между первым режимом, в котором используется первый источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, и вторым режимом, в котором используется второй источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, на основании изменения от первого уровня до второго уровня, которое является первым изменением в уровне напряжения шины управления, и изменения от второго уровня до первого уровня, которое является вторым изменением в уровне напряжения шины управления.
Первый источник энергии предпочтительно включает в себя вращающуюся электрическую машину, конфигурация которой обеспечивает приведение в движение ведущего колеса, и энергоаккумулирующее устройство, конфигурация которого позволяет ему аккумулировать электрическую энергию и подавать аккумулированную электрическую энергию во вращающуюся электрическую машину. Второй источник энергии включает в себя двигатель внутреннего сгорания.
Первый режим предпочтительно направлен на приведение в действие вращающейся электрической машины путем использования электрической энергии, аккумулированной в энергоаккумулирующем устройстве. Второй режим направлен на то, чтобы заставить гибридное транспортное средство двигаться за счет приведение в действие двигателя внутреннего сгорания.
Устройство управления предпочтительно переключает режим движения между первым режимом при обнаружении как первого изменения, так и второго изменения.
Устройство управления предпочтительно переключает режим движения между первым режимом и вторым режимом в соответствии с первым изменением. В случае, когда второе изменение не происходит до истечения заранее определенного периода времени с базисного момента времени, когда произошло первое изменение, устройство управления возвращает режим движения к тому режиму, который был задан до базисного момента времени. В случае, когда второе изменение происходит до истечения заранее определенного периода времени с базисного момента времени, устройство управления поддерживает режим движения в том режиме, который был достигнут после базисного момента времени.
В предпочтительном варианте, если второе изменение происходит до истечения заранее определенного периода времени с базисного момента времени, когда произошло первое изменение, устройство управления переключает режим движения между первым режимом и вторым режимом. Если второе изменение не произошло до истечения заранее определенного периода времени с базисного момента времени, устройство управления поддерживает режим движения в том режиме, который был задан до базисного момента времени.
В предпочтительном варианте, гибридное транспортное средство дополнительно включает в себя зарядное устройство, конфигурация которого обеспечивает зарядку энергоаккумулирующего устройства с помощью электрической энергии, подаваемой из источника, внешнего по отношению к гибридному транспортному средству.
Устройство управления предпочтительно задает режим движения в первом режиме, когда движение гибридного транспортного средства начинается в первый раз после того, как заканчивается зарядка энергоаккумулирующего устройства зарядным устройством.
Эффекты изобретения
В случае, когда в шине управления, по которой передается сигнал для указания переключения режима движения, возникает ошибка, в соответствии с данным изобретением можно избежать события, заключающегося в том, что гибридное транспортное средство непрерывного движения в режиме движения, отличающемся от надлежащего режима движения.
Краткое описание чертежей
На Фиг.1 представлена полная блок-схема гибридного транспортного средства в соответствии с первым вариантом осуществления.
На Фиг.2 представлена принципиальная схема, отображающая конфигурацию преобразователей 10 и 12 и соединительных блоков 72-76, показанных на Фиг.1.
На Фиг.3 подробно показаны конфигурация зарядного устройства 240 и зарядный кабель 300, соединяющий гибридное транспортное средство с внешним источником питания.
На Фиг.4 представлена принципиальная схема, отображающая подробную конфигурацию инверторов 20 и 22, показанных на Фиг.1.
На Фиг.5 представлена принципиальная схема для схемы 80 генерирования сигнала, показанной на Фиг.1.
На Фиг.6 представлена схема для описания срабатывания переключателя 82.
На Фиг.7 представлена соответствующая зависимость между состоянием переключателя 82 и напряжением сигнала MD.
На Фиг.8 представлена функциональная блок-схема для описания конфигурации системы управления движением гибридного транспортного средства 1000, заключенной в электронном блоке управления (ЭБУ), обозначенном позицией 30.
На Фиг.9 представлен график для описания переключения режима движения.
На Фиг.10 представлена временная диаграмма для описания переключения режима движения в соответствии с первым вариантом осуществления.
На Фиг.11 представлено состояние, в котором шина 81 управления короткозамкнута на заземляющий узел.
На Фиг.12 представлена временная диаграмма для сравнения между управлением переключением режима движения в соответствии с первым вариантом осуществления и управлением переключением режима движения в соответствии со сравнительным примером для первого варианта осуществления.
На Фиг.13 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии с первым вариантом осуществления.
На Фиг.14 представлена временная диаграмма для описания управления переключением режима движения в соответствии со вторым вариантом осуществления.
На Фиг.15 представлена диаграмма для описания изменения в напряжении VMD, когда шина 81 управления короткозамкнута на «землю», и управления переключением режимом движения в соответствии со вторым вариантом осуществления.
На Фиг.16 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии со вторым вариантом осуществления.
На Фиг.17 представлена временная диаграмма для описания управления переключением режима движения в соответствии с третьим вариантом осуществления.
На Фиг.18 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии с третьим вариантом осуществления.
На Фиг.19 представлена еще одна конфигурация схемы генерирования сигнала.
Перечень ссылочных позиций
2 - Двигатель
4 - Механизм деления мощности
6 - Колеса
10, 12 - Преобразователь
15 - Плечо U-фазы
16 - Плечо V-фазы
17 - Плечо W-фазы
20, 22 - Инвертор
21, 23, 52, 54, 56, 184 - Датчик тока
30 - ЭБУ
42, 44, 46, 48, 182, 188 - Датчик напряжения
62, 64, 66 - Датчик температуры
72, 74, 76 - Соединительный блок
80, 80A - Схема генерирования сигнала
81 - Шина управления
82, 312 - Переключатель
83 - Резистор
84 - Заземляющий узел
85 - Узел подачи питания
240 - Зарядное устройство
241 - Ввод
242 - Схема преобразования переменного тока в постоянный
244 - Схема преобразования постоянного тока в переменный
246 - Развязывающий трансформатор
248 - Выпрямительная схема
250 - Блок управления движением
260 - Блок циркуляции суммарной мощности
270, 280 - Блок управления инвертором
290 - Блок управления переключением режима
295 - Блок управления двигателем
300 - Зарядный кабель
310 - Соединитель
320 - Штепсельная вилка
330 - Устройство прерывания зарядной цепи (УПЗЦ)
332 - Реле
334 - Контрольно-управляющая схема
400 - Розетка
402 - Источник питания
1000 - Гибридное транспортное средство
BA - Основное энергоаккумулирующее устройство
BB1, BB2 - Вспомогательное энергоаккумулирующее устройство
C, C1, C2 - Конденсатор
D1-D10 - Диод
L1, L2 - Катушка индуктивности
ЭДГ1, ЭДГ2 - Электродвигатель-генератор
ОШ - Положительная шина
ПШ1, ПШ2, ПШ3 - Отрицательная шина
Q1-Q10 - Переключающий элемент
RA, RB1, RB2 - Токоограничивающий резистор
SRB1, SRP1, SRG1, SRB2, SRP2, SRG2, SRB3, SRP3, SRG3 - Реле основной защиты системы
UL, VL, WL - Шина.
Наилучшие способы осуществления изобретения
Теперь, со ссылками на прилагаемые чертежи, будут подробно описаны варианты осуществления данного изобретения. На чертежах, одинаковые или соответственные элементы обозначены одинаковыми ссылочными позициями и их описание повторяться не будет.
Первый вариант осуществления изобретения
На Фиг.1 представлена полная блок-схема гибридного транспортного средства в соответствии с первым вариантом осуществления.
Как показано на Фиг.1, гибридное транспортное средство 1000 включает в себя основное энергоаккумулирующее устройство BA, вспомогательные энергоаккумулирующие устройства BB1, BB2, соединительные блоки 72, 74, 76, преобразователи 10, 12, конденсатор C, инверторы 20, 22, положительные шины ПШ1, ПШ2, ПШ3, отрицательную шину ОШ, двигатель 2, электродвигатели-генераторы ЭДГ1, ЭДГ2, механизм 4 разделения мощности и колесо 6. Гибридное транспортное средство 1000 также включает в себя датчики 42, 44, 46, 48 напряжения, датчики 21, 23, 52, 54, 56 тока, датчики 62, 64, 66 температуры, зарядное устройство 240, ввод 241 и электронный блок управления (ЭБУ), обозначенный позицией 30.
Гибридное транспортное средство 1000 включает в себя первый и второй источники энергии. Первый источник энергии включает в себя основное энергоаккумулирующее устройство BA, вспомогательные энергоаккумулирующие устройства BB1, BB2 и электродвигатель-генератор ЭДГ2. Второй источник энергии включает в себя двигатель 2. Гибридное транспортное средство 1000 может двигаться, пользуясь, по меньшей мере, одним из первого и второго источников энергии.
Двигатель 2 представляет собой двигатель внутреннего сгорания, генерирующий движущую мощность за счет сгорания такого горючего, как бензин. Механизм 4 разделения мощности подключен к двигателю 2 и электродвигателям-генераторам ЭДГ1, ЭДГ2 для разделения мощности между ними. Механизм 4 разделения мощности образован планетарной зубчатой передачей, имеющей три вращающихся вала, например солнечного колеса, водила и кольцевого зубчатого колеса (зубчатого венца). Эти три вращающихся вала соединены с вращающимися валами двигателя 2, электродвигателя-генератора ЭДГ1 и электродвигателя-генератора ЭДГ2 соответственно. Устанавливая полый ротор для электродвигателя-генератора ЭДГ1 и пропуская коленчатый вал двигателя 2 в центре полого ротора, можно механически соединить двигатель 2, электродвигатели-генераторы ЭДГ1, ЭДГ2 с механизмом 4 разделения мощности. Вращающийся вал электродвигателя-генератора ЭДГ2 связан с колесом 6 посредством понижающей передачи или дифференциальной передачи, которая не показана.
Электродвигатель-генератор ЭДГ1 установлен на гибридном транспортном средстве 1000, работая как силовой генератор с приводом от двигателя 2 и как электрический двигатель, который может запускать двигатель 2. Электродвигатель-генератор ЭДГ2 установлен на гибридном транспортном средстве 1000 в качестве электрического двигателя, основная задача которого - привод колеса 6.
Каждое из основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2 представляет собой энергоаккумулирующее устройство, выполненное с возможностью зарядки и разрядки, и состоит из аккумуляторной батареи, такой как никель-металлогидридная или ионно-литиевая. В качестве, по меньшей мере, одного из основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2 можно применять конденсатор большой емкости.
Основное энергоаккумулирующее устройство BA подает электрическую энергию в преобразователь 10, в режиме рекуперации электрической энергии заряжается преобразователем 10. Каждое из основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2 подает электрическую энергию в преобразователь 12, а в режиме рекуперации электрической энергии заряжается преобразователем 12.
Вспомогательные энергоаккумулирующие устройства BB1 и BB2 избирательно соединяются с преобразователем 12 посредством соединительных блоков 74 и 76. Следовательно, больше не нужно предусматривать преобразователь, соответствующий каждому вспомогательному энергоаккумулирующему устройству. В данном варианте осуществления имеются два вспомогательных энергоаккумулирующих устройства, но это не является ограничением. В нижеследующем тексте, то из вспомогательных энергоаккумулирующих устройств BB1 и BB2, которое соединено с преобразователем 12, называется «вспомогательным энергоаккумулирующим устройством BB».
Соединительный блок 72 предусмотрен между основным энергоаккумулирующим устройством BA и положительной и отрицательной шинами ПШ1, ОШ. Соединительный блок 72 имеет проводящее состояние (ВКЛ) и непроводящее состояние (ВЫКЛ), управление которыми осуществляется в соответствии с сигналом CN1, подаваемым из ЭБУ 30. Когда соединительный блок 72 достигает состояния ВКЛ, основное энергоаккумулирующее устройство BA соединяется с положительной шиной ПШ1 и отрицательной шиной ОШ. В отличие от этого, когда соединительный блок 72 достигает состояния ВЫКЛ, основное энергоаккумулирующее устройство BA отсоединяется от положительной шины ПШ1 и отрицательной шины ОШ.
Соединительный блок 74 подсоединен между вспомогательным энергоаккумулирующим устройством BB1 и положительной и отрицательной шинами ПШ2, ОШ. Соединительный блок 74 достигает проводящего состояния или непроводящего состояния в соответствии с сигналом CN2. Соответственно, соединительный блок 74 электрически подключает вспомогательное энергоаккумулирующее устройство BB1 к положительной шине ПШ2 и отрицательной шине ОШ или электрически отключает его от них.
Соединительный блок 76 подсоединен между вспомогательным энергоаккумулирующим устройством BB2 и положительной и отрицательной шинами ПШ2, ОШ. Соединительный блок 76 достигает проводящего состояния или непроводящего состояния в соответствии с сигналом CN3. Соответственно, соединительный блок 76 электрически подключает вспомогательное энергоаккумулирующее устройство BB2 к положительной шине ПШ2 и отрицательной шине ОШ или электрически отключает его от них.
Преобразователь 10 соединен с положительной шиной ПШ1 и отрицательной шиной ОШ. Преобразователь 10 повышает напряжение, подаваемое из основного энергоаккумулирующего устройства BA, на основании сигнала PWC1 из ЭБУ 30, и выдает повешенное напряжение на положительную шину ПШ3. Преобразователь 10 осуществляет преобразование с понижением частоты рекуперированной энергии, подаваемой из инверторов 20 и 22 посредством положительной шины ПШ3, до уровня напряжения основного энергоаккумулирующего устройства BA на основании сигнала PWC1, чтобы зарядить основное энергоаккумулирующее устройство BA.
Преобразователь 10 останавливает операцию переключения, приняв сигнал SD1 останова из ЭБУ 30. Преобразователь 10 фиксирует верхнее плечо и нижнее плечо (описываемые позже) в преобразователе 10 для состояния ВКЛ и состояния ВЫКЛ соответственно, получив сигнал UA1 включения верхнего плеча из ЭБУ 30.
Преобразователь 12 соединен с положительной шиной ПШ2 и отрицательной шиной ОШ. Преобразователь 12 повышает напряжение вспомогательного энергоаккумулирующего устройства BB на основании сигнала PWC2 из ЭБУ 30 и выдает повышенное напряжение на положительную шину ПШ3. Преобразователь 12 преобразует с понижением частоты рекуперированную энергию, подаваемую из инверторов 20 и 22 посредством положительной шины ПШ3, до уровня напряжения вспомогательного энергоаккумулирующего устройства BB на основании сигнала PWC2, чтобы зарядить энергоаккумулирующее устройство BB.
Кроме того, преобразователь 12 останавливает операцию переключения, приняв сигнал SD2 останова из ЭБУ 30. Преобразователь 12 фиксирует верхнее плечо и нижнее плечо (описываемые позже) в преобразователе 12 для состояния ВКЛ и состояния ВЫКЛ соответственно, получив сигнал UA2 включения верхнего плеча из ЭБУ 30.
Конденсатор C подсоединен между положительной шиной ПШ3 и отрицательной шиной ОШ, чтобы сглаживать изменение напряжения между положительной шиной ПШ3 и отрицательной шиной ОШ.
Инвертор 20 реагирует на сигнал PWI1 из ЭБУ 30, преобразуя напряжение постоянного тока, поступающее из положительной шины ПШ3, в трехфазное напряжение переменного тока. Преобразованное трехфазное напряжение переменного тока выдается в электродвигатель-генератор ЭДГ1. Инвертор 20 преобразует трехфазное напряжение переменного тока, генерируемое электродвигателем-генератором ЭДГ1 с помощью движущей энергии двигателя 2 в напряжение постоянного тока на основании сигнала PWI1 и выдает преобразованное напряжение постоянного тока на положительную шину ПШ3.
Инвертор 22 реагирует на сигнал PWI2 из ЭБУ 30, преобразуя напряжение постоянного тока, поступающее из положительной шины ПШ3, в трехфазное напряжение переменного тока. Преобразованное трехфазное напряжение переменного тока выдается в электродвигатель-генератор ЭДГ2. Инвертор 20 преобразует трехфазное напряжение переменного тока, генерируемое электродвигателем-генератором ЭДГ2, воспринимающим вращающую силу от колеса 6 в режиме рекуперативного торможения транспортного средства, в напряжение постоянного тока на основании сигнала PWI2 и выдает преобразованное напряжение постоянного тока на положительную шину ПШ3.
Каждый из электродвигателей-генераторов ЭДГ1 и ЭДГ2 представляет собой трехфазную вращающуюся электрическую машину переменного тока, состоящую, например, из трехфазного асинхронного электрического двигателя-генератора переменного тока. Электродвигатель-генератор ЭДГ1 имеет рекуперативное возбуждение от инвертора 20. Трехфазное напряжение переменного тока, генерируемое с помощью движущей силы двигателя 2, выдается в инвертор 20. Электродвигатель-генератор ЭДГ1 возбуждается инвертором 20 в режиме движения с затратой энергии в момент запуска двигателя 2, чтобы завести двигатель 2.
Электродвигатель-генератор ЭДГ2 возбуждается инвертором 22 в режиме движения с затратой энергии, чтобы генерировать движущую силу для привода транспортного средства. Электродвигатель-генератор ЭДГ2 имеет рекуперативное возбуждение от инвертора 22 в режиме рекуперативного торможения транспортного средства и выдает трехфазное напряжение переменного тока, генерируемое с помощью вращающей силы, воспринимаемой от колеса 6, в инвертор 22.
Датчик 21 тока обнаруживает значение тока, текущего между электродвигателем-генератором ЭДГ1 и инвертором 20, в качестве значения MCRT1 тока электродвигателя, которое выдается в ЭБУ 30. Датчик 23 тока обнаруживает значение тока, текущего между электродвигателем-генератором ЭДГ2 и инвертором 22, в качестве значения MCRT2 тока электродвигателя, которое выдается в ЭБУ 30.
Датчик 42 напряжения обнаруживает и выдает в ЭБУ 30 напряжение VBA основного энергоаккумулирующего устройства BA. Датчик 52 тока обнаруживает ток IA, протекающий между основным энергоаккумулирующим устройством BA и преобразователем 10, выдавая получаемое значение в ЭБУ 30. Датчик 62 температуры обнаруживает и выдает в ЭБУ 30 температуру TA основного энергоаккумулирующего устройства BA.
Датчики 44 и 46 напряжения обнаруживают и выдают в ЭБУ 30 напряжение VB1 вспомогательного энергоаккумулирующего устройства BB1 и напряжение VB2 вспомогательного энергоаккумулирующего устройства BB2. Датчики 54 и 56 тока обнаруживают и выдают в ЭБУ 30 ток IB1, протекающий между вспомогательным энергоаккумулирующим устройством BB1 и преобразователем 12, и ток IB2, протекающий между вспомогательным энергоаккумулирующим устройством BB2 и преобразователем 12. Датчики 64 и 66 температуры обнаруживают и выдают в ЭБУ 30 температуру TB1 вспомогательного энергоаккумулирующего устройства BB1 и температуру TB2 вспомогательного энергоаккумулирующего устройства BB2.
Датчик 48 напряжения обнаруживает и выдает в ЭБУ 30 напряжение на выводах конденсатора C (напряжение VH).
Зарядное устройство 240 и ввод 241 заряжают основное энергоаккумулирующее устройство BA и вспомогательные энергоаккумулирующие устройства BB1, BB2 с помощью электрической энергии, подаваемой из источника вне гибридного транспортного средства 1000. Электрическая энергия, подаваемой из источника питания, внешнего по отношению к транспортному средству (внешнего источника питания), выдается на положительную шину ПШ2 и отрицательную шину ОШ через ввод 241 и зарядное устройство 240. Зарядное устройство 240 включается и выключается в соответствии с сигналом CHG из ЭБУ 30.
На основании обнаруженных значений из датчика 42 напряжения, датчика 62 температуры и датчика 52 тока, ЭБУ 30 задает параметр состояния заряда СЗ(M), указывающий остаточную емкость основного энергоаккумулирующего устройства BA, входную верхнюю предельную энергию Wвx(M), указывающую значение верхнего предела зарядной электрической энергии основного энергоаккумулирующего устройства BA, и выходную верхнюю предельную мощность Wвых(M), указывающую значение верхнего предела разрядной электрической энергии основного энергоаккумулирующего устройства BA.
Аналогичным образом, на основании обнаруженных значений из датчика 44 (или 46) напряжения, датчика 64 (или 66) температуры и датчика 54 (или 56) тока, ЭБУ 30 задает параметр состояния заряда СЗ(S), указывающий остаточную емкость вспомогательного энергоаккумулирующего устройства BB, входную верхнюю предельную энергию Wвx(S), указывающую значение верхнего предела зарядной электрической энергии основного энергоаккумулирующего устройства BB, и выходную верхнюю предельную мощность Wвых(S), указывающую значение верхнего предела разрядной электрической энергии основного энергоаккумулирующего устройства BB.
В общем случае, остаточная величина (именуемая далее параметром состояния заряда (СЗ)) обозначается отношением (выраженным в %) величины заряда в текущем состоянии к соответствующей величине в полностью заряженном состоянии для каждой батареи. Wвx и Wвых указываются в качестве значения верхнего предела электрической энергии, чтобы избежать избыточной зарядки или избыточной разрядки даже в случае, если соответствующее энергоаккумулирующее устройство (BA, BB1, BB2) выдает или принимает электрическую энергию в течение заранее определенного периода времени (например, составляющего приблизительно 10 секунд).
ЭБУ 30 генерирует и выдает сигналы CN1, CN2 и CN3 для управления соединительными блоками 72, 74 и 76 соответственно. ЭБУ 30 генерирует сигналы PWC1, SD1 и UA1 для управления преобразователем 10 и выдает любой из этих сигналов в преобразователь 10. ЭБУ 30 генерирует сигналы PWC2, SD2 и UA2 для управления преобразователем 12 и выдает любой из этих сигналов в преобразователь 12.
Кроме того, ЭБУ 30 генерирует и выдает в инверторы 20 и 22 сигналы PWI1 и PWI2, предписывающие возбуждение инверторов 20 и 22 соответственно. Помимо этого, ЭБУ 30 генерирует и выдает в зарядное устройство 240 сигнал CHG, предписывающий управление зарядным устройством 240.
ЭБУ 30 переключает режим движения гибридного транспортного средства 1000 между режимом расходования заряда (РЗ) и режимом поддержания заряда (ПЗ).
Режим РЗ - это режим движения, обуславливающий генерирование движущей силы гибридного транспортного средства 1000 электродвигателем-генератором ЭДГ2 с помощью электрической энергии, аккумулированной в основном энергоаккумулирующем устройстве BA и вспомогательном энергоаккумулирующем устройстве BB. В течение периода времени, когда гибридное транспортное средство 1000 движется в режиме РЗ, электрическая энергия, аккумулированная в основном энергоаккумулирующем устройстве BA и вспомогательном энергоаккумулирующем устройстве BB, потребляется электродвигателем-генератором ЭДГ2. А именно, в режиме РЗ, первый источник энергии (основное энергоаккумулирующее устройство BA, вспомогательное энергоаккумулирующее устройство BB и электродвигатель-генератор ЭДГ2) используется с более высоким приоритетом при движении гибридного транспортного средства.
Режим ПЗ вызывает генерирование движущей силы гибридного транспортного средства 1000 таким образом, что поддерживается суммарный параметр СЗ основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2. В этом случае, ЭБУ 30 управляет двигателем 2 так, что тот используется с более высоким приоритетом при движении транспортного средства. Например, в режиме ПЗ, движущая сила гибридного транспортного средства 1000 генерируется только двигателем 2. В этом случае, потребление электрической энергии, аккумулированной в основном энергоаккумулирующем устройстве BA и вспомогательном энергоаккумулирующем устройстве BB, подавляется.
В режиме ПЗ, двигатель 2 и электродвигатель-генератор ЭДГ2 могут генерировать движущую силу гибридного транспортного средства 1000. Например, электрическая энергия, аккумулированная в основном энергоаккумулирующем устройстве BA и вспомогательном энергоаккумулирующем устройстве BB, применяется для увеличения энергии, которая может быть отдана из электродвигателя-генератора ЭДГ2. В режиме торможения или режиме замедления гибридного транспортного средства 1000, электродвигатель-генератор ЭДГ2 имеет рекуперативное возбуждение. Электрическая энергия, генерируемая электродвигателем-генератором ЭДГ2, аккумулируется в основном энергоаккумулирующем устройстве BA или вспомогательном энергоаккумулирующем устройстве BB. А именно, в режиме ПЗ возможен обмен электрической энергией между основным и вспомогательным энергоаккумулирующими устройствами BA и BB и электродвигателем-генератором ЭДГ2. В режиме ПЗ, управление зарядкой и разрядкой основного энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB осуществляется так, что суммарный параметр СЗ поддерживается даже в таком случае.
Гибридное транспортное средство 1000 дополнительно включает в себя схему 80 генерирования сигнала, генерирующую сигнал MD, предписывающий переключение режима движения, и шину 81 управления, по которой сигнал MD передается в ЭБУ 30 из схемы 80 генерирования сигнала. Схема 80 генерирования сигнала включает в себя переключатель 82, который приводится в действие вручную.
Когда водитель приводит в действие переключатель 82, схема 80 генерирования сигнала генерирует сигнал MD. ЭБУ 30 реагирует на сигнал MD, переключая режим движения между режимом РЗ и режимом ПЗ, и управляет первым источником энергии и вторым источником энергии в соответствии с выбранным режимом.
ЭБУ 30 управляет соединительными блоками 72-76, преобразователями 10, 12 и зарядным устройством 240 во время режима зарядки основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1 и BB2. Когда зарядка основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1 и BB2 завершается, ЭБУ 30 задают режим движения как режим РЗ. А именно, когда система транспортного средства, показанная на Фиг.1, приводится в действие в первый раз после того, как зарядка основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1 и BB2 завершается, режим движения задается как режим РЗ.
На Фиг.2 представлена принципиальная схема, отображающая конфигурацию преобразователей 10 и 12 и соединительных блоков 72-76, показанных на Фиг.1.
Как показано на Фиг.2, преобразователь 10 включает в себя полупроводниковые переключающие элементы Q1 и Q2, предназначенные для направления электрической энергии, диоды D1 и D2, катушку L1 индуктивности и конденсатор C1.
Хотя в данном варианте осуществления в качестве энергонаправляющего полупроводникового переключающего элемента (также именуемого далее просто «переключающим элементом») применяется биполярный транзистор с изолированным затвором (БТИЗ), применим любой произвольный переключающий элемент в той мере, в какой управление его включением и выключением возможно посредством сигнала управления. Например, в качестве энергонаправляющего полупроводникового переключающего элемента можно применять полевой транзистор со структурой «металл-оксид-полупроводник» (полевой МОП-транзистор) или биполярный транзистор.
Переключающие элементы Q1 и Q2 подсоединены последовательно между положительной шиной ПШ3 и отрицательной шиной ОШ. Диоды D1 и D2 встречно-параллельно соединены переключающими элементами Q1 и Q2 соответственно. Катушка L1 индуктивности имеет один конец, соединенный с узлом соединения переключающих элементов Q1 и Q2, и другой конец, соединенный с положительной шиной ПШ1. Конденсатор C1 соединен с положительной шиной ПШ1 и отрицательной шиной ОШ.
Преобразователь 12 имеет конфигурацию, аналогичную конфигурации преобразователя 10. Конфигурация преобразователя 12 соответствует конфигурации преобразователя 10 при условии, что переключающие элементы Q1 и Q2 заменены переключающими элементами Q3 и Q4 соответственно, диоды D1 и D2 заменены диодами D3 и D4 соответственно, катушка L1 индуктивности, конденсатор C1 и положительная шина ПШ1 заменены катушкой L2 индуктивности, конденсатором C2 и положительной шиной ПШ2 соответственно.
Переключающие элементы Q1 и Q2 соответствуют верхнему плечу и нижнему плечу соответственно преобразователя 10. Аналогично, переключающие элементы Q3 и Q4 соответствуют верхнему плечу и нижнему плечу соответственно преобразователя 12.
Преобразователи 10 и 12 состоят из схемы прерывателя. Преобразователь 10 (12) реагирует на сигнал PWC1 (PWC2) из ЭБУ 30 (Фиг.1), повышая напряжение на положительной шине ПШ1 (ПШ2) с помощью катушки L1 (L2) индуктивности, и выдает повышенное напряжение на положительную шину ПШ3. В частности, коэффициентом повышения выходного напряжения, поступающего из основного энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB, можно управлять путем регулирования отношения периодов включения и выключения (т.е. рабочего цикла) переключающего элемента Q1 (Q3) и/или переключающего элемента Q2 (Q4).
Преобразователь 10 (12) реагирует на сигнал PWC1 (PWC2) из ЭБУ 30 (не показан), осуществляя преобразование с понижением частоты напряжения на положительной шине ПШ3 и выдает преобразованное с понижением частоты напряжение на положительную шину ПШ1 (ПШ2). В частности, коэффициентом преобразования с понижением частоты напряжения на положительной шине ПШ3 можно управлять путем регулирования отношения периодов включения и выключения (т.е. рабочего цикла) переключающего элемента Q1 (Q3) и/или переключающего элемента Q2 (Q4).
Соединительный блок 72 включает в себя реле SRB1 основной защиты системы, подсоединенное между положительным электродом основного энергоаккумулирующего устройства BA и положительной шиной ПШ1, реле SRG1 основной защиты системы, подсоединенное между отрицательным электродом основного энергоаккумулирующего устройства BA и отрицательной шиной ОШ, а также реле SRP1 основной защиты системы и токоограничивающий резистор RA, подсоединенные последовательно между отрицательным электродом основного энергоаккумулирующего устройства BA и отрицательной шиной ОШ и предусмотренные параллельными реле SRG1 основной защиты системы. Реле SRB1, SRP1 и SRG1 основной защиты системы имеют свои проводящее состояние (ВКЛ) и непроводящее состояние (ВЫКЛ), управляемые сигналом CN1, подаваемым из ЭБУ 30.
Соединительные блоки 74 и 76 имеют конфигурацию, аналогичную конфигурации соединительного блока 72, приведенной выше. В частности, конфигурация соединительного блока 74 соответствует конфигурации соединительного блока 72, приведенной выше, при условии, что основное энергоаккумулирующее устройство BA заменено вспомогательным энергоаккумулирующим устройством BB1, реле SRB1, SRP1 и SRG1 основной защиты системы заменены реле SRB2, SRP2 и SRG2 основной защиты системы соответственно, и токоограничивающий резистор RA заменен токоограничивающим резистором RB1. Каждое реле основной защиты системы в соединительном блоке 74 имеет проводящее состояние и непроводящее состояние, управляемые сигналом CN2 из ЭБУ 30.
Кроме того, конфигурация соединительного блока 76 соответствует конфигурации соединительного блока 72, приведенной выше, при условии, что основное энергоаккумулирующее устройство BA заменено вспомогательным энергоаккумулирующим устройством BB2, реле SRB1, SRP1 и SRG1 основной защиты системы заменены реле SRB3, SRP3 и SRG3 основной защиты системы соответственно, и токоограничивающий резистор RA заменен токоограничивающим резистором RB2. Каждое реле основной защиты системы в соединительном блоке 76 имеет проводящее состояние и непроводящее состояние, управляемые сигналом CN3 из ЭБУ 30.
В данном варианте осуществления, ввод 241 получает энергию переменного тока из источника, внешнего по отношению к транспортному средству. ЭБУ 30 передает сигнал CHG в зарядное устройство 240. Зарядное устройство 240 реагирует на сигнал CHG, преобразуя энергию переменного тока, идущую от ввода 241, в энергию постоянного тока.
В режиме зарядки основного энергоаккумулирующего устройства BA, ЭБУ 30 передает сигналы CN2 и CN3 в соединительные блоки 74 и 76 соответственно, чтобы выключить соединительные блоки 74 и 76. Кроме того, ЭБУ 30 передает сигнал CN1 в соединительный блок 72, чтобы включить соединительный блок 72. ЭБУ 30 передает сигнал UA1 в преобразователь 10 и сигнал SD2 в преобразователь 12. Преобразователь 10 реагирует на сигнал UA1, переключая верхнее плечо (переключающий элемент Q1) в состояние ВКЛ, а нижнее плечо (переключающий элемент Q2) в состояние ВЫКЛ. Преобразователь 12 реагирует на сигнал SD2, переключая верхнее плечо и нижнее плечо в состояние ВЫКЛ. Энергия постоянного тока, выдаваемая из зарядного устройства 240, проходит через катушку L2 индуктивности, диод D3, переключающий элемент Q1, катушку L1 индуктивности и соединительный блок 72, поступая в основное энергоаккумулирующее устройство BA. Таким образом и заряжается основное энергоаккумулирующее устройство BA.
Во время режима зарядки вспомогательного энергоаккумулирующего устройства BB1, ЭБУ 30 передает сигналы CN1 и CN3 в соединительные блоки 72 и 76 соответственно, чтобы перевести соединительные блоки 72 и 76 в выключенное состояние. Кроме того, ЭБУ 30 передает в соединительный блок 74 сигнал CN2, предписывающий переключение соединительного блока 74 в состояние ВКЛ. ЭБУ 30 также передает сигнал SD1 в преобразователь 10 и сигнал SD2 в преобразователь 12. Преобразователь 10 (12) переключает верхнее плечо и нижнее плечо в состояние ВЫКЛ в соответствии с сигналом SD1 (SD2). Энергия постоянного тока, выдаваемая из зарядного устройства 240 проходит через соединительный блок 74, поступая во вспомогательное энергоаккумулирующее устройство BB1. Соответственно, вспомогательное энергоаккумулирующее устройство BB1 заряжается.
Во время режима зарядки вспомогательного энергоаккумулирующего устройства BB2, ЭБУ 30 передает сигналы CN1 и CN2 в соединительные блоки 72 и 74 соответственно, чтобы перевести соединительные блоки 72 и 74 в выключенное состояние. Кроме того, ЭБУ 30 передает в соединительный блок 76 сигнал CN3, предписывающий переключение соединительного блока 76 в состояние ВКЛ. ЭБУ 30 также передает сигнал SD1 (SD2) в преобразователь 10 (12). Энергия постоянного тока, выдаваемая из зарядного устройства 240, проходит через соединительный блок 76, поступая во вспомогательное энергоаккумулирующее устройство BB2. Соответственно, вспомогательное энергоаккумулирующее устройство BB2 заряжается.
На Фиг.3 представлена схема, иллюстрирующая подробную конфигурацию зарядного устройства 240 и конфигурацию зарядного кабеля 300, соединяющего гибридное транспортное средство с внешним источником питания.
Как показано на Фиг.3, зарядное устройство 240 включает в себя схему 242 преобразования переменного тока в постоянный, схему 244 преобразования постоянного тока в переменный, развязывающий трансформатор 246 и выпрямительную схему 248.
Схема 242 преобразования переменного тока в постоянный состоит из однофазной мостовой схемы. Схема 242 преобразования переменного тока в постоянный преобразует энергию переменного тока в энергию постоянного тока на основании сигнала CHG из ЭБУ 30. Схема 242 преобразования переменного тока в постоянный также функционирует как вольтодобавочная схема прерывателя для повышения напряжения за счет использования обмотки в качестве катушки индуктивности.
Схема 244 преобразования постоянного тока в переменный состоит из однофазной мостовой схемы. Схема 244 преобразования постоянного тока в переменный преобразует энергию постоянного тока в энергию переменного тока высокой частоты для выдачи в развязывающий трансформатор 246 на основании сигнала CHG из ЭБУ 30.
Развязывающий трансформатор 246 включает в себя магнитопровод, выполненный из магнитного материала, а также первичную обмотку и вторичную обмотку, намотанные вокруг магнитопровода. Первичная обмотка и вторичная обмотка электрически изолированы и соединены со схемой 244 преобразования постоянного тока в переменный и выпрямительной схемой 248 соответственно. Развязывающий трансформатор 246 преобразует энергию переменного тока высокой частоты, воспринимаемую из схемы 244 преобразования постоянного тока в переменный, в уровень напряжения, соответствующий отношению витков первичной обмотки и вторичной обмотки, для выдачи в выпрямительную схему 248. Выпрямительная схема 248 выпрямляет энергию переменного тока, выдаваемую из развязывающего трансформатора 246, что приводит к получению энергии постоянного тока.
Напряжение между схемой 242 преобразования переменного тока в постоянный и схемой 244 преобразования постоянного тока в переменный (напряжение на выводах сглаживающего конденсатора) обнаруживается датчиком 182 напряжения. Сигнал, отображающий результат обнаружения, подается в ЭБУ 30. Ток на выходе зарядного устройства 240 обнаруживается датчиком 184 тока. Сигнал, отображающий результат обнаружения, подается в ЭБУ 30.
ЭБУ 30 генерирует и выдает в зарядное устройство 240 сигнал CHG, предписывающий возбуждение зарядного устройства 240, когда основное энергоаккумулирующее устройство BA и вспомогательные энергоаккумулирующие устройства BB1, BB2 заряжены источником 402 питания, внешним по отношению к транспортному средству.
Помимо управления зарядным устройством 240, ЭБУ 30 способен обнаруживать отказ зарядного устройства 240. Когда напряжение, обнаруженное датчиком 182 напряжения, ток, обнаруженный датчиком 184 тока, или аналогичный параметр превышает пороговое значение, происходит обнаружение отказа зарядного устройства 240.
Ввод 241 предусмотрен, например, в боковой части гибридного транспортного средства. К вводу 241 подключен соединитель 310 зарядного кабеля 300, соединяющего гибридное транспортное средство с внешним источником 402 питания.
Зарядный кабель 300 включает в себя соединитель 310, штепсельную вилку 320 и устройство прерывания зарядной цепи (УПЗЦ), обозначенное позицией 330.
Соединитель 310 подключен к вводу 241. Соединитель 310 снабжен переключателем 312. Переключатель 312 замкнут, когда соединитель 310 подключен к вводу 241. Когда переключатель 312 замкнут, сигнал PISW подключения кабеля, указывающий, что соединитель 310 подключен к вводу 241, вводится в ЭБУ 30. Например, переключатель 312 размыкается и замыкается во взаимодействии с замковым элементом (не показан), которые крепит соединитель 310 зарядного кабеля 300 к вводу 241 гибридного транспортного средства.
Штепсельная вилка 320 зарядного кабеля 300 соединена с розеткой 400. Розетка 400 представляет собой, например, штепсельную розетку, предусмотренную на доме. В розетку 400 подается энергия переменного тока из источника 420 питания.
УПЗЦ 330 включает в себя реле 332 и контрольно-управляющую схему 334. В разомкнутом состоянии реле 332 подача электрической энергии из источника 402 питания в гибридное транспортное средство отключена. В замкнутом состоянии реле 332 подача электрической энергии и источника 402 питания в гибридное транспортное средство возможна. Состоянием реле 332 управляет ЭБУ 30, а соединитель 310 зарядного кабеля 300 при этом подключен к вводу 241 гибридного транспортного средства.
Контрольно-управляющая схема 334 подает контрольный сигнал CPLT (сигнал прямоугольной формы) на контрольно-управляющую шину в состоянии, когда штепсельная вилка 320 зарядного кабеля 300 включена в розетку 400, т.е. подключена к внешнему источнику 402 питания, а соединитель 310 подключен к вводу 241. Контрольный сигнал CPLT периодически изменяется генератором (не показан), предусмотренным в контрольно-управляющей схеме 334.
Контрольно-управляющая схема 334 может выдавать заранее определенный контрольный сигнал CPLT, даже если соединитель 310 отключен от ввода 241 в случае, если штепсельная вилка 320 включена в розетку 400. Следует отметить, что ЭБУ 30 не может обнаружить контрольный сигнал CPLT, если тот выдается в состоянии отключения соединителя 310 от ввода 241.
В случае, если штепсельная вилка 320 включена в розетку 400, а соединитель 310 подключен к вводу 241, контрольно-управляющая схема 334 генерирует контрольный сигнал CPLT, имеющий заранее определенную длительность импульса (рабочий цикл).
В соответствии с длительностью импульса контрольного сигнала CPLT, гибридное транспортное средство уведомляется о величине тока, который может быть подан. Например, гибридное транспортное средство уведомляется о допустимой нагрузке по току зарядного кабеля 300. Длительность импульса контрольного сигнала CPLT не зависит от напряжения и тока источника 402 питания и является постоянной.
Длительность импульса контрольного сигнала CPLT может быть другой, если используется кабель другого типа. А именно, длительность импульса контрольного сигнала CPLT может определяться для каждого типа зарядного кабеля.
В данном варианте осуществления, основное энергоаккумулирующее устройство BA и вспомогательные энергоаккумулирующие устройства BB1, BB2 заряжаются в состоянии, в котором гибридное транспортное средство и источник 402 питания соединены зарядным кабелем 300. Напряжение VAC переменного тока источника 402 питания обнаруживается датчиком 188 напряжения, предусмотренным в гибридном транспортном средстве. Обнаруженное напряжение VAC передается в ЭБУ 30.
На Фиг.4 представлена принципиальная схема, отображающая подробную конфигурацию инверторов 20 и 22, показанных на Фиг.1.
Обращаясь к Фиг.4 отмечаем, что инвертор 20 включает в себя плечо 15 U-фазы, плечо 16 V-фазы и плечо 17 W-фазы. Плечо 15 U-фазы, плечо 16 V-фазы и плечо 17 W-фазы подсоединены параллельно между положительной шиной ПШ3 и отрицательной шиной ОШ.
Плечо 15 U-фазы включает в себя переключающие элементы Q5 и Q6, подсоединенные последовательно между положительной шиной ПШ3 и отрицательной шиной ОШ, и диоды D5 и D6, соединенные встречно-параллельно с переключающими элементами Q5 и Q6 соответственно. Плечо 16 V-фазы включает в себя переключающие элементы Q7 и Q8, подсоединенные последовательно между положительной шиной ПШ3 и отрицательной шиной ОШ, и диоды D7 и D8, соединенные встречно-параллельно с переключающими элементами Q7 и Q8 соответственно. Плечо 17 W-фазы включает в себя переключающие элементы Q9 и Q10, подсоединенные последовательно между положительной шиной ПШ3 и отрицательной шиной ОШ, и диоды D9 и D10, соединенные встречно-параллельно с переключающими элементами Q9 и Q10 соответственно.
Промежуточная точка каждого плеча соединена с каждым фазным концом каждой фазной обмотки электродвигателя-генератора ЭДГ1. В частности, электродвигатель-генератор ЭДГ1 представляет собой трехфазный асинхронный электродвигатель с постоянным магнитом. Каждая из трех обмоток U, V и W-фаз имеет один конец, соединенный с нейтральной точкой. Другой конец обмотки U-фазы соединен с шиной UL, идущей от узла соединения переключающих элементов Q5 и Q6. Другой конец обмотки V-фазы соединен с шиной VL, идущей от узла соединения переключающих элементов Q7 и Q8. Другой конец обмотки W-фазы соединен с шиной WL, идущей от узла соединения переключающих элементов Q9 и Q10.
Внутренняя конфигурация схемы инвертора 22 согласно Фиг.1 аналогична внутренней конфигурации схемы инвертора 20 при условии соединения с электродвигателем-генератором ЭДГ2. Вследствие этого, подробное описание этой конфигурации повторено не будет. На Фиг.4 изображен сигнал PWI, прикладываемый к инвертору. Сигнал PWI является обобщенным представлением сигналов PWI1 и PWI2. Как показано на Фиг.1, сигналы PWI1 и PWI2 применяют к инверторам 20 и 22 соответственно.
На Фиг.5 представлена принципиальная схема для схемы 80 генерирования сигнала, показанной на Фиг.1.
Как показано на Фиг.5, схема 80 генерирования сигнала включает в себя переключатель 82, резистор 83, заземляющий узел 84 и узел подачи питания 85.
Переключатель 82 соединяет шину 81 управления с заземляющим узлом 84 в состоянии ВКЛ. Переключатель 82 отсоединяет шину 81 управления от заземляющего узла 84 в состоянии ВЫКЛ. Резистор 83 подсоединен между узлом подачи питания 85 и шиной 81 управления. Напряжение +B узла подачи питания выше, чем напряжение заземляющего узла 84 (заданное равным 0).
Переключатель 82 состоит из переключателя с самовозвратом. Переключатель с самовозвратом поддерживает заранее определенное состояние только во время срабатывания и автоматически возвращается в исходное состояние, когда срабатывание заканчивается. В данном варианте осуществления, переключатель 82 поддерживает состояние ВКЛ только тогда, когда он приведен в действие, и возвращается в состояние ВЫКЛ, когда срабатывание заканчивается.
На Фиг.6 представлена схема для описания срабатывания переключателя 82.
Как показано на Фиг.6, переключатель 82 находится в состоянии ВЫКЛ, когда его не приводит в действие пользователь (например, водитель). Переключатель 82 достигает состояния ВКЛ в результате ручной операции, осуществляемой пользователем (например, путем нажатия на кнопку, предусмотренную для переключателя). Во время срабатывания переключателя 82 (например, когда кнопка нажата), переключатель 82 поддерживается в состоянии ВКЛ. Когда ручная операция заканчивается, переключатель 82 возвращается в исходное состояние (то есть состояние ВЫКЛ).
На Фиг.7 представлена соответствующая зависимость между состоянием переключателя 82 и напряжением сигнала MD. Напряжение сигнала MD соответствует напряжению шины 81 управления. Обращаясь к Фиг.7 отмечаем, что переключатель 82 до момента t1 находится в состоянии ВЫКЛ. Когда переключатель 82 находится в состоянии ВЫКЛ, напряжение сигнала MD (напряжение VMD, которое является напряжением шины 81 управления) равно +B. В момент t1, переключатель 82 достигает состояния ВКЛ за счет ручной операции. Соответственно, напряжение VMD изменяется от +B до 0. В момент t2, переключатель 82 возвращается в состояние ВЫКЛ из-за окончания ручной операции. Соответственно, напряжение VMD изменяется от 0 до +B. В течение периода от момента t1 до момента t2, напряжение VMD равно 0, поскольку переключатель 82 поддерживается в состоянии ВКЛ.
Напряжение VMD определяется как находящееся на «высоком уровне»и на «низком уровне», когда значение напряжения выше чем и ниже чем пороговое значение (пусть это пороговое значение составляет B/2) соответственно. В частности, когда напряжение VMD равно +B, напряжение VMD находится на высоком уровне. Когда напряжение VMD равно 0, напряжение VMD находится на низком уровне. В целях описания уровня напряжения VMD, предполагается, что пороговое значение (B/2) обозначено на других чертежах.
На Фиг.8 представлена функциональная блок-схема для описания конфигурации системы управления движением гибридного транспортного средства 1000, заключенной в ЭБУ 30.
В частности, на Фиг.8 представлена конфигурация управления, связанная с управлением распределением энергии между двигателем 2 и электродвигателями-генераторами ЭДГ1, ЭДГ2. Каждый функциональный блок, показанный на Фиг.8, можно воплотить посредством исполнения заранее определенной программы, которая заранее сохраняется с помощью ЭБУ 30, и/или посредством функциональной обработки с помощью электронной схемы (аппаратного средства) в ЭБУ 30.
Как показано на Фиг.8, блок 260 вычисления суммарной энергии вычисляет общую требуемую энергию (суммарную требуемую энергию Pttl) гибридного транспортного средства 1000 на основании скорости транспортного средства и рабочего уровня педали акселератора (не показана). Суммарная требуемая энергия Pttl также может включать в себя энергию (отдаваемую энергию двигателя), требуемую для генерирования энергии зарядка батареи электродвигателем-генератором ЭДГ1 в соответствии с состоянием транспортного средства.
Блок 250 управления движением принимает входную и входную верхние предельные энергии Wвx(M) и Wвых(M) основного энергоаккумулирующего устройства BA, входную и входную верхние предельные энергии Wвx(S) и Wвых(S) вспомогательного энергоаккумулирующего устройства BB, суммарную требуемую энергию Pttl из блока 260 вычисления суммарной энергии, а также запрос на рекуперативное торможение, когда приведена в действие педаль тормоза, чтобы генерировать значения Tqcom1 и Tqcom2 команд крутящего момента в качестве команды управления электродвигателем. В этом состоянии, блок 250 управления движением генерирует значения Tqcom1 и Tqcom2 команд крутящего момента таким образом, что сумма входной и выходной энергий электродвигателей-генераторов ЭДГ1 и ЭДГ2 не превышает сумму входных верхних предельных энергий (Wвx(M) + Wвx(S)) и сумму выходных верхних предельных мощностей (Wвых(M) + Wвых(S)) основного энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB.
Кроме того, блок 250 управления движением разделяет суммарную требуемую энергию Pttl на движущую энергию транспортного средства, вырабатываемую электродвигателем-генератором ЭДГ2, и движущую энергию транспортного средства, вырабатываемую двигателем 2. Когда режим движения является режимом РЗ, разделение движущей энергии транспортного средства определяется так, что как можно больше используется электрическая энергия, аккумулированная в энергоаккумулирующем устройстве. Следовательно, работа двигателя 2 запрещается. Когда режим движения является режимом ПЗ, движущая энергия транспортного средства, вырабатываемая двигателем 2, задается такой, что двигатель 2 работает с высоким кпд. За счет такого управления можно увеличить норму потребления горючего гибридного транспортного средства.
Блок 270 управления инвертором генерирует сигнал PWI1 управления инвертора 20 на основании значения Tqcom1 команды крутящего момента и значения MCRT1 тока электродвигателя, протекающего в электродвигателе-генераторе ЭДГ1. Аналогично, блок 280 управления инвертора генерирует сигнал PWI2 управления инвертора 22 на основании значения Tqcom2 команды крутящего момента и значения MCRT2 тока электродвигателя, протекающего в электродвигателе-генераторе ЭДГ2.
Блок 250 управления движением задает требуемое значение движущей энергии транспортного средства, вырабатываемой двигателем, и генерирует команду Ecom управления двигателем на основании требуемого значения. Команда Ecom управления двигателем выдается в блок 295 управления двигателем. Блок 295 управления двигателем управляет работой двигателя 2 в соответствии с командой Ecom управления двигателем.
Блок 290 управления переключением режима принимает сигнал MD. Блок 290 управления переключением режима определяет, удовлетворяется ли условие переключения режима движения, на основании напряжения VMD сигнала MD. Когда определяется, что условие переключения режима движения удовлетворяется, блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения. Блок 250 управления движением переключает режим движения между режимом РЗ и режимом ПЗ в соответствии с командой из блока 290 управления переключением режима.
Когда определяется, что условие переключения режима движения не удовлетворяется, блок 290 управления переключением режима не выдает команду переключить режим движения. В этом случае, блок 250 управления движением не осуществляет переключение режима движения.
Когда режим движения является режимом РЗ, гибридное транспортное средство 1000 движется, непосредственно используя электрическую энергию, аккумулированную в основном энергоаккумулирующем устройстве BA и вспомогательном энергоаккумулирующем устройстве BB. Когда суммарная требуемая энергия Pttl меньше, чем верхний предел (Wвых(M) + Wвых(S)) полной выходной энергии, получаемой от энергоаккумулирующих устройств, гибридное транспортное средство 1000 движется только за счет движущей энергии транспортного средства, вырабатываемой электродвигателем-генератором ЭДГ2. Когда суммарная требуемая энергия Pttl превышает верхний предел (Wвых(M) + Wвых(S)) полной выходной энергии, получаемой от энергоаккумулирующих устройств, и это происходит в режиме РЗ, запускается двигатель 2, чтобы вызвать генерирование движущей энергии транспортного средства двигателем 2. В частности, в режиме РЗ, используется первый источник энергии (основное энергоаккумулирующее устройство BA, вспомогательное энергоаккумулирующее устройство BB и электродвигатель-генератор ЭДГ2), имеющий более высокий приоритет при движении гибридного транспортного средства 1000.
В режиме РЗ, управление зарядкой и разрядкой основного энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB осуществляется таким образом, что используется электрическая энергия вспомогательного энергоаккумулирующего устройства BB, имеющая более высокий приоритет, чем электрическая энергия основного энергоаккумулирующего устройства BA. В случае, если состояние аккумулирования во вспомогательном энергоаккумулирующем устройстве BB во время движения гибридного транспортного средства 1000 ухудшается (например, когда параметр СЗ становится ниже чем заранее определенное пороговое значение), вспомогательное энергоаккумулирующее устройство BB, соединенное с преобразователем 12, заменяют. Например, в случае, если вспомогательное энергоаккумулирующее устройство BB1 выбрано в качестве вспомогательного энергоаккумулирующего устройства BB, когда система транспортного средства приведена в действие, вспомогательное энергоаккумулирующее устройство BB1 отсоединяется от преобразователя 12, а вспомогательное энергоаккумулирующее устройство BB2 - в качестве нового вспомогательного энергоаккумулирующего устройства BB - соединяют с преобразователем 12.
Когда режим движения является режимом ПЗ, движущая энергия транспортного средства разделяется между двигателем 2 и электродвигателем-генератором ЭДГ2 таким образом, что суммарный параметр СЗ поддерживается на уровне заранее определенного целевого значения. В этом случае, для движения гибридного транспортного средства 1000 используется главным образом двигатель 2.
Путем зарядки основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2 посредством внешнего источника питания и зарядного устройства 240, в основном энергоаккумулирующем устройстве BA и вспомогательных энергоаккумулирующих устройствах BB1, BB2 будет аккумулироваться достаточная электрическая энергия. Следовательно, когда система транспортного средства приводится в действие в первый раз после завершения зарядки основного энергоаккумулирующего устройства BA и вспомогательных энергоаккумулирующих устройств BB1, BB2, режим движения задается как режим РЗ.
На Фиг.9 представлен график для описания переключения режима движения. Как показано на Фиг.9, режим движения гибридного транспортного средства 1000 до момента t11 является режимом РЗ. В режиме РЗ, суммарный параметр СЗ становится меньше со временем, потому что электрическая энергия подается из основного энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB в электродвигатель-генератор ЭДГ2.
В момент t11, водитель задействует переключатель 82. В ответ на это происходит переключение режима движения с режима РЗ в режим ПЗ. В режиме ПЗ, блок 250 управления движением (см. Фиг.8) осуществляет управление зарядкой и разрядкой основное энергоаккумулирующего устройства BA и вспомогательного энергоаккумулирующего устройства BB таким образом, что суммарный параметр СЗ поддерживается на уровне целевого значения А. Например, в качестве целевого значения А используется значение параметра СЗ в момент времени, когда срабатывает переключатель 82 (момент t11).
В момент t12, водитель снова задействует переключатель 82. Соответственно, режим движения переключается с режима ПЗ в режим РЗ.
Таким образом, сразу же после задания режима движения как режима ПЗ, суммарный параметр СЗ можно сохранить. Соответственно, в желаемой зоне можно воплотить движение электромобиля (ЭМ), при котором двигатель 2 не используется.
В случае, если водитель не задействует переключатель 82, суммарный параметр СЗ продолжает становиться ниже в результате продолжения движения в режиме РЗ. Когда суммарный параметр СЗ становиться ниже, чем заранее определенный нижний предел, для движения гибридного транспортного средства 1000 используется двигатель 2.
Управление переключением режима движения
На Фиг.10 представлена временная диаграмма для описания переключения режима движения в соответствии с первым вариантом осуществления.
Как показано на Фиг.10, состояния ВЫКЛ переключателя 82 изменяется на состояние ВКЛ за счет ручной операции в момент t21. В ответ на это, напряжение VMD изменяется от +B до 0. Иными словами, напряжение VMD изменяется с высокого уровня до низкого уровня переключателем 82, состояние ВЫКЛ которого изменяется на состояние ВКЛ.
В момент t22, срабатывание переключателя 82 заканчивается. Соответственно, переключатель 82 возвращается в состояние ВЫКЛ из состояния ВКЛ. В ответ на это, напряжение VMD изменяется от 0 до +B. Иными словами, напряжение VMD изменяется от низкого уровня до высокого уровня переключателем 82, состояние ВКЛ которого изменяется на состояние ВЫКЛ.
В первом варианте осуществления, ЭБУ 30 переключает режим движения, когда напряжение VMD изменяется от высокого уровня до низкого уровня и изменяется от низкого уровня до высокого уровня. Как показано на Фиг.10, напряжение VMD изменяется от высокого уровня до низкого уровня в момент t21 и изменяется от низкого уровня до высокого уровня в момент t22. ЭБУ 30 переключает режим движения с режима РЗ на режим РЗ в момент t22.
Аналогично, напряжение VMD изменяется от высокого уровня до низкого уровня в момент t23 и изменяется от низкого уровня до высокого уровня в момент t24. ЭБУ 30 переключает режим движения с режиме РЗ на режим ПЗ в момент t24.
Управление переключением режима движения, когда приводится в действие переключатель 82, будет описано с помощью сравнительного примера управления переключением режима движения в соответствии с первым вариантом осуществления. Согласно этому управлению, режим движения переключается, когда напряжение VMD изменяется от высокого уровня до низкого уровня. Поэтому, когда состояние переключателя 82 изменяется так, как показано на Фиг.10, режим движения переключается с режима РЗ на режим ПЗ в момент t21 и переключается с режима ПЗ на режим РЗ в момент t23.
В случае, если управление осуществляется в соответствии со сравнительным примером, режим движения нельзя переключить надлежащим образом, когда шина 81 управления короткозамкнута на заземляющий узел.
На Фиг.11 представлено состояние, в котором шина 81 управления короткозамкнута на заземляющий узел. Обращаясь к Фиг.11 отмечаем, что напряжение VMD шины 81 управления изменяется от +B до 0 за счет короткого замыкания шины 81 управления на «землю» (заземляющий узел). Иными словами, напряжение VMD изменяется от высокого уровня до низкого уровня.
На Фиг.12 представлена временная диаграмма для сравнения управления переключением режима движения в соответствии с первым вариантом осуществления и управления переключением режима движения в соответствии со сравнительным примером для первого варианта осуществления. Как показано на Фиг.12, напряжение VMD изменяется от +B до 0 в момент времени, когда шина 81 управления замыкается накоротко на заземляющий узел 84 (момент t25). Поскольку шину 81 управления нельзя отсоединить от заземляющего узла, когда шина 81 управления короткозамкнута на заземляющий узел, напряжение VMD не может измениться от высокого уровня до низкого уровня.
В соответствии со сравнительным примером, режим движения переключается с режима РЗ на режиме ПЗ в момент t25. Режим движения поддерживается в режиме ПЗ с момента t25 и далее.
В данном варианте осуществления, в качестве переключателя 82 применяется переключатель с самовозвратом.
Кроме того, в соответствии с данным вариантом осуществления, режим движения переключается, когда напряжение VMD изменяется от высокого уровня до низкого уровня и от низкого уровня до высокого уровня. В случае, если шина 81 управления короткозамкнута на заземляющий узел 84, напряжение VMD изменится от высокого уровня до низкого уровня, но не вернется на высокий уровень с низкого уровня. Следовательно, в таком случае режим движения не переключается в данном варианте осуществления.
Данное изобретение позволяет предотвратить ошибочное переключение режима движения в случае, если шина 81 управления короткозамкнута на заземляющий узел. Кроме того, в данном варианте осуществления можно предотвратить событие, заключающееся в том, что транспортное средство продолжает двигаться в режиме движения, отличающемся от надлежащего режима движения.
На Фиг.13 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии с первым вариантом осуществления. Процесс, представленный на блок-схеме последовательности операций, вызывается из основной программы в течение каждого заданного периода времени и исполняется блоком 290 управления переключением режима (см. Фиг.8).
Обращаясь к Фиг.13 отмечаем, что блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от высокого уровня до низкого уровня (этап S1).
Например, блок 290 управления переключением режима определяет изменение в уровне напряжения VMD так, как указано ниже. Сначала блок 290 управления переключением режима сравнивает значение напряжения VMD с пороговым значением (например B/2), чтобы определить уровень напряжения VMD. Блок 290 управления переключением режима определяет, что уровень напряжения VMD изменился, когда уровень напряжения VMD в первый момент времени отличается от уровня напряжения VMD во второй момент времени.
Когда определяется, что напряжение VMD не изменилось от высокого уровня до низкого уровня (НЕТ на этапе S1), вся обработка возвращается к основной программе. Когда блок 290 управления переключением режима определяет, что напряжение VMD изменилось от высокого уровня до низкого уровня (ДА на этапе S1), процесс выполняется согласно этапу S2. В частности, на этапе S2, блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от низкого уровня до высокого уровня.
Когда определяется, что напряжение VMD не изменилось от низкого уровня до высокого уровня (НЕТ на этапе S2), повторно осуществляется процесс согласно этапу S2. Иными словами, процесс согласно этапу S2 осуществляется повторно, когда напряжение VMD находится на высоком уровне.
Когда определяется, что напряжение VMD изменилось от низкого уровня до высокого уровня (ДА на этапе S2), блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения (этап S3). В ответ на команду из блока 290 управления переключением режима, блок 250 управления движением переключает режим движения. Когда процесс согласно этапу S3 заканчивается, завершается и вся обработка.
В случае, если шина 81 управления находится в надлежащем состоянии и переключатель 32 задействован, обнаруживают изменение напряжения VMD от высокого уровня до низкого уровня (ДА на этапе S1) и потом обнаруживают изменение напряжения VMD от низкого уровня до высокого уровня (ДА на этапе S2). В этом случае, блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения (этап S3). Блок 250 управления движением переключает режим движения в соответствии с этой командой. Следовательно, переключение режима движения происходит надлежащим образом.
В случае, если шина 81 управления короткозамкнута на «землю» (заземляющий узел), обнаруживают, что напряжение VMD изменилось от высокого уровня до низкого уровня (ДА на этапе S1). Однако напряжение VMD не вернется к высокому уровню с низкого уровня. Следовательно, процесс определения согласно этапу S2 будет повторен. В этом случае, блок 290 управления переключением режима не выдаст команду переключить режим движения в блок 250 управления движением. Поэтому переключение режима движения не происходит.
В соответствии с первым вариантом осуществления, переключатель 82 состоит из переключателя с самовозвратом. В частности, переключатель 82 электрически подключает шину 81 управления к заземляющему узлу 84 в течение периода времени, на протяжении которого осуществляется ручная операция, и подключает шину 81 управления к узлу 85 подачи питания через резистор 83, когда ручная операция не осуществляется.
На основании первого изменения уровня напряжения на шине 81 управления (изменения от высокого уровня до низкого уровня) и второго изменения уровня напряжение на шине 81 управления (изменения от низкого уровня до высокого уровня), ЭБУ 30 переключает режим движения гибридного транспортного средства 1000 между первым режимом (режим РЗ) и вторым режимом (режимом ПЗ). Таким образом, можно избежать события, заключающегося в том, что транспортное средство продолжает движение в режиме, отличающемся от надлежащего режима движения, когда на шине 81 управления возникает ошибка (когда шина 81 управления короткозамкнута на «землю»).
В частности, гибридное транспортное средство в соответствии с данным вариантом осуществления переходит в режим движения, соответствующий режиму РЗ, в момент начала движения. В случае, если режим движения переключается из режима РЗ в режим ПЗ вследствие закорачивания шины 81 управления, пробег ЭМ окажется короче. Однако данный вариант осуществления может помочь избежать события, заключающегося в том, что пробег ЭМ сокращается вследствие закорачивания шины 81 управления.
Второй вариант осуществления изобретения
Конфигурация гибридного транспортного средства в соответствии со вторым вариантом осуществления аналогична конфигурации гибридного транспортного средства в соответствии с первым вариантом осуществления. Поэтому описание конфигурации повторено не будет. Второй вариант осуществления отличается от первого варианта осуществления управлением переключением режима движения.
На Фиг.14 представлена временная диаграмма для описания управления переключением режима движения в соответствии со вторым вариантом осуществления.
Как показано на Фиг.14 и 10, изменение в состоянии переключателя 82 и изменение в напряжении VMD в течение периода с момента t31 до момента t32 идентичны изменению в состоянии переключателя 82 и изменению в напряжении VMD соответственно в течение периода с момента t21 до момента t22.
Во втором варианте осуществления, режим движения переключается, когда напряжение VMD изменяется от высокого уровня до низкого уровня. В частности, режим движения переключается с режима РЗ на режим ПЗ в момент t31.
В случае, если напряжение VMD изменяется от низкого уровня до высокого уровня прежде, чем истечет заранее определенный период T времени с момента t31, режим движения остается тем режимом, который достигнут после переключения. В момент t32, напряжение VMD изменяется от высокого уровня до низкого уровня. Период Т1 времени с момента t31 до момента t32 короче, чем заранее определенный период Т времени. Поэтому режим движения остается режимом ПЗ в момент t32.
Изменение в состоянии переключателя 82 и изменение в напряжении VMD в течение периода времени с момента t33 до момента t34 аналогичны изменению в состоянии переключателя 82 и изменению в напряжении VMD в течение периода времени с момента t31 до момента t32. В момент t33, режим движения переключается с режима ПЗ на режим РЗ. Период T2 времени с момента t33 до момента t34 короче, чем заранее определенный период Т времени. Поэтому режим движения остается режимом ПЗ в момент t34.
Таким образом, во втором варианте осуществления режим движения переключается в момент времени, когда напряжение VMD изменяется от высокого уровня до низкого уровня. В случае, если напряжение VMD изменяется от низкого уровня до высокого уровня прежде, чем истечет заранее определенный период T времени с момента времени, когда режим движения переключается, режим движения остается тем режимом, который достигнут после переключения.
На Фиг.15 представлена диаграмма для описания изменения в напряжении VMD, когда шина 81 управления короткозамкнута на «землю», и управления переключением режимом движения в соответствии со вторым вариантом осуществления.
Согласно Фиг.15, напряжение VMD изменяется от +B до 0, когда шина 81 управления короткозамкнута на «землю». Вместе с тем, напряжение VMD остается на уровне 0 даже после истечения заранее определенного периода Т времени с момента, когда напряжение VMD изменилось (момента t41).
В случае, если напряжение VMD не изменяется от низкого уровня до высокого уровня даже при истечении заранее определенного периода Т времени с момента, когда напряжение VMD изменяется от высокого уровня до низкого уровня, режим движения возвращается режиму, заданному до переключения. В момент t42, режим движения переключается с режима ПЗ на режим РЗ. Поэтому, в соответствии со вторым вариантом осуществления, можно избежать события, заключающегося в том, что транспортное средство непрерывно движется в режиме, отличающемся от надлежащего режима движения, когда в шине 81 управления возникает ошибка (когда шина 81 управления короткозамкнута на «землю»).
Длительность заранее определенного периода Т времениа задают приблизительно равной длительности обычного времени срабатывания переключателя 82 (например, приблизительно составляющей несколько секунд, хотя это и не является ограничительным признаком).
На Фиг.16 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии со вторым вариантом осуществления. Процесс, показанный на этой блок-схеме последовательности операций, вызывается из основной программы в каждом заранее определенном цикле и осуществляется блоком 290 управления переключением режима (см. Фиг.8).
Как показано на Фиг.16, блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от высокого уровня до низкого уровня (этап S11). На этапе S11 осуществляется процесс, аналогичный процессу согласно этапу S1.
Когда определяется, что напряжение VMD не изменилось от высокого уровня до низкого уровня (НЕТ на этапе S11), вся обработка возвращается к основной программе. Когда определяется, что напряжение VMD изменилось от высокого уровня до низкого уровня (ДА на этапе S11), блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения (этап S12). Блок 250 управления движением переключает режим движения в соответствии с командой из блока 290 управления переключением режима.
Блок 290 управления переключением режима измеряет прошедший период времени, с которого напряжение VMD изменяется от высокого уровня до низкого уровня (этап S13).
Затем блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от низкого уровня до высокого уровня (этап S14). Процесс согласно этапу S14 аналогичен процессу согласно этапу S2.
Когда определяется, что напряжение VMD не изменилось от низкого уровня до высокого уровня (НЕТ на этапе S14), процесс осуществляется согласно этапу S15. На этапе S15, блок 290 управления переключением режима определяет, истек ли заранее определенный период времени с момента времени, когда напряжение VMD изменилось от высокого уровня до низкого уровня. Когда определяется, что заранее определенный период времени не истек (НЕТ на этапе S15), процесс возвращается к этапу S13. В отличие от этого, когда определяется, что заранее определенный период времени истек (ДА на этапе S15), осуществляется процесс согласно этапу S16. На этапе S16, блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения. Блок 250 управления движением переключает режим движения между режимом РЗ и режимом ПЗ в соответствии с командой из блока 290 управления переключением режима.
На этапе S14, вся обработка возвращается к основной программе в случае, если напряжение VMD изменяется от низкого уровня до высокого уровня (ДА на этапе S14). Вся обработка возвращается к основной программе в случае и тогда, когда заканчивается обработка согласно этапу S16.
Вероятность того, что водитель будет непрерывно задействовать переключатель 82 дольше обычного времени срабатывания, считается малой. Поэтому в случае, если шина 81 управления находится в надлежащем состоянии, а переключатель 82 задействован должным образом, вероятность изменения напряжения VMD от высокого уровня до низкого уровня и последующего возврата на высокий уровень с низкого уровня до истечения заранее определенного периода времени с момента, когда вышеупомянутое изменение происходит, является большой. В этом случае, блок 290 управления переключением режима поддерживает режим движения как тот режим, который был достигнут после переключения.
В случае, если шину 81 управления короткозамкнута на «землю», напряжение VMD изменяется от высокого уровня до низкого уровня. Вместе с тем, напряжение VMD остается на низком уровне даже после истечения заранее определенного периода времени с момента, когда произошло изменение. В этом случае, блок 290 управления переключением режима выдает команду возвратить режим движения к тому режиму, который был задан до переключения. Иными словами, режим движения гибридного транспортного средства возвращается к прежнему режиму сразу же после переключения. Следовательно, в соответствии со вторым вариантом осуществления можно избежать события, заключающегося в том, что транспортное средство непрерывно движется в режиме движения, отличающемся от надлежащего режима движения, когда в шине 81 управления возникает ошибка (в случае, если шина 81 управления оказывается соединенной с «землей»).
Третий вариант осуществления изобретения
Конфигурация гибридного транспортного средства в соответствии с третьим вариантом осуществления аналогична конфигурации гибридного транспортного средства в соответствии с первым вариантом осуществления. Третий вариант осуществления отличается от первого и второго вариантов осуществления особенностью управления переключением режима движения.
На Фиг.17 представлена временная диаграмма для описания управления переключением режима движения в соответствии с третьим вариантом осуществления.
Согласно Фиг.17 и 14 моменты t51, t52, t53 и t54 соответствуют моментам t31, t32, t33 и t34 соответственно. Период Т1 времени с момента t51 до момента t52 и период T2 времени с момента t53 до момента t54 короче, чем заранее определенный период Т времени. Подобно второму варианту осуществления, длительность заранее определенного периода Т времени задают приблизительно равной длительности обычного времени срабатывания переключателя 82 (например, приблизительно составляющей несколько секунд, хотя эта и не является ограничительным признаком).
В третьем варианте осуществления, режим движения переключается в случае, если напряжение VMD изменяется от низкого уровня до высокого уровня прежде, чем истекает заранее определенный период Т времени с того момента времени, когда напряжение VMD изменяется от высокого уровня до низкого уровня. В частности, в момент t52 режим движения переключается с режима РЗ на режиме ПЗ, а потом в момент t54 режим движения переключается с режиме ПЗ на режим РЗ.
Как показано на Фиг.15, напряжение VMD изменяется от +B до 0, когда шина 81 управления короткозамкнута на «землю». Вместе с тем, напряжение VMD остается на уровне 0 даже после истечения заранее определенного периода Т времени с того момента времени (момента t41), когда напряжение VMD изменяется. В третьем варианте осуществления, режим движения не переключается в таком случае. Соответственно, в третьем варианте осуществления можно избежать события, заключающегося в том, что транспортное средство продолжает двигаться в режиме движения, отличающемся от надлежащего режима движения, когда на шине 81 управления возникает ошибка (когда шина 81 управления короткозамкнута на «землю»).
На Фиг.18 представлена блок-схема последовательности операций для описания управления переключением режима движения в соответствии с третьим вариантом осуществления. Процесс, показанный на этой блок-схеме последовательности операций, вызывается из основной программы в каждом заранее определенном цикле и осуществляется блоком 290 управления переключением режима (см. Фиг.8).
Как показано на Фиг.18, блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от высокого уровня до низкого уровня (этап S21). На этапе S21, процесс осуществляется аналогично процессу на этапе S1.
Когда определяется, что напряжение VMD не изменилось от высокого уровня до низкого уровня (НЕТ на этапе S21), вся обработка возвращается к основной программе. Когда определяется, что напряжение VMD изменилось от высокого уровня до низкого уровня (ДА на этапе S21), блок 290 управления переключением режима подсчитывает истекшее время с момента, когда напряжение VMD изменилось от высокого уровня до низкого уровня (этап S22).
Затем блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от низкого уровня до высокого уровня (этап S23). Когда определяется, что напряжение VMD не изменилось от низкого уровня до высокого уровня (НЕТ на этапе S23), блок 290 управления переключением режима осуществляет процесс согласно этапу S24. На этапе S24, блок 290 управления переключением режима определяет, истек ли заранее определенный период времени с момента, когда напряжение VMD изменилось от высокого уровня до низкого уровня. Когда определяется, что заранее определенный период времени не истек (НЕТ на этапе S24), процесс возвращается к этапу S22. Когда определяется, что заранее определенный период времени истек (ДА на этапе S24), весь процесс заканчивается.
Когда определяется, что напряжение VMD изменилось от низкого уровня до высокого уровня (ДА на этапе S23), блок 290 управления переключением режима выдает в блок 250 управления движением команду переключить режим движения (этап S25). Блок 250 управления движением переключает режим движения в соответствии с командой из блока 290 управления переключением режима. Когда заканчивается процесс согласно этапу S25, вся обработка возвращается к основной программе.
В случае, если шина 81 управления находится в надлежащем состоянии, а переключатель 82 задействован должным образом, вероятность изменения напряжения VMD от высокого уровня до низкого уровня и последующего возврата на высокий уровень с низкого уровня до истечения заранее определенного периода Т времени с момента, когда вышеупомянутое изменение происходит, является большой. В этом случае, блок 290 управления переключением режима поддерживает режим движения как тот режим, который был достигнут после переключения.
В случае, если шина 81 управления короткозамкнута на «землю», напряжение VMD изменяется от высокого уровня до низкого уровня. Вместе с тем, напряжение VMD остается на низком уровне даже после истечения заранее заданного периода времени с момента времени, когда это изменение произошло. В этом случае, блок 290 управления переключением режима не выдает команду переключить режим движения. Иными словами, режим движения гибридного транспортного средства не переключается. Поэтому, в соответствии с третьим вариантом осуществления, можно избежать события, заключающегося в том, что транспортное средство продолжает двигаться в режиме, отличающемся от надлежащего режима движения, когда на шине 81 управления возникает ошибка (когда шина 81 управления короткозамкнута на «землю»).
Конфигурация схемы генерирования сигнала, входящей в состав гибридного транспортного средства согласно данному варианту осуществления, не обязательно должна быть такой, как показанная на Фиг.5. На Фиг.19 представлена еще одна конфигурация схемы генерирования сигнала.
Как показано на Фиг.19, схема 80А генерирования сигнала отличается от схемы 80 генерирования сигнала тем, что переключатель 82 предусмотрен между шиной 81 управления и заземляющим узлом 84, и тем, что резистор 83 подсоединен между шиной 81 управления и заземляющим узлом 84. В соответствии с этой конфигурацией, когда переключатель 82 находится в состоянии ВКЛ, напряжение на шине 81 управления изменяется от 0 до +B. В случае, если шина 81 управления замыкается накоротко на узел подачи питания 85, напряжение на шине 81 управления возвращается к величине +B.
Управление переключением режима движения в любом из вариантов осуществления с первого по третий применимо даже тогда, когда схема 80 генерирования сигнала заменена схемой 80А генерирования сигнала. Следует отметить, что в этом случае блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от низкого уровня до высокого уровня, на этапах S1, S11 и S21. На этапах S2, S14 и S23, блок 290 управления переключением режима определяет, изменилось ли напряжение VMD от высокого уровня до низкого уровня.
Хотя данное изобретение описано на основе двигателя внутреннего сгорания (или просто двигателя) в качестве второго источника энергии, входящего в состав гибридного транспортного средства, данное изобретение применимо и к гибридному транспортному средству, включающему в себя множество источников энергии, отличающихся друг от друга типом, и имеющему множество режимов движения, отличающихся используемым режимом множества источников энергии. Поэтому в качестве второго источника энергии можно применять любой источник энергии того типа, который отличается от типа первого источника энергии, и не обязательно являющийся двигателем внутреннего сгорания. Например, в качестве второго источника энергии можно встроить топливный элемент в гибридное транспортное средство.
Следует понять, что варианты осуществления, раскрытые в данном описании, в каждом своем аспекте носят иллюстративный, а не ограничительный характер. Объем данного изобретения определяется формулой изобретения, а не вышеизложенным описанием, и должен рассматриваться как включающий в себя любые модификации в рамках объема и идеи формулы изобретения и ее эквивалентов.
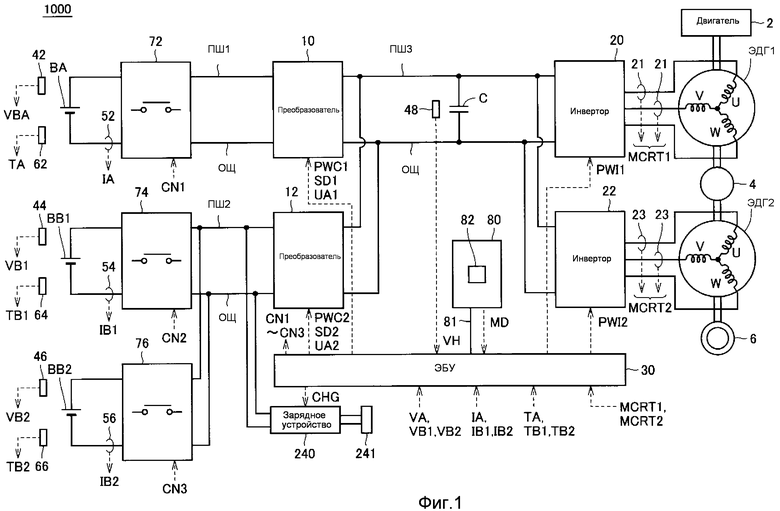
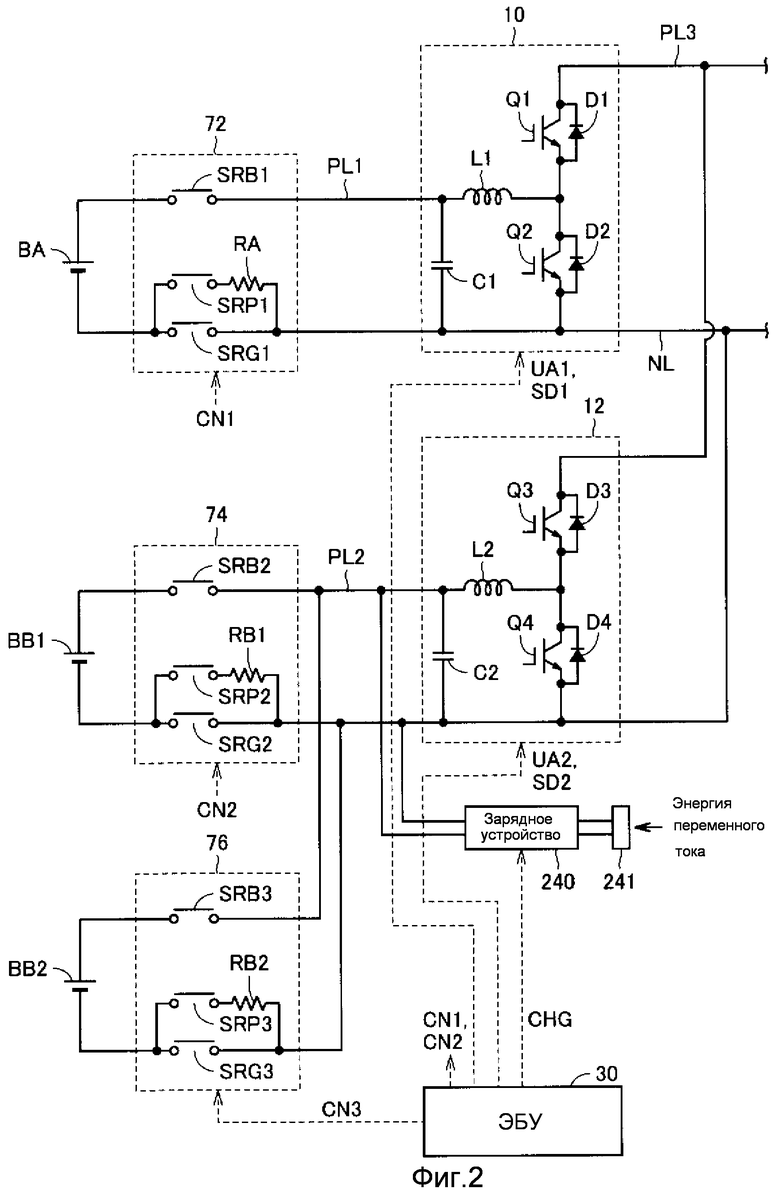
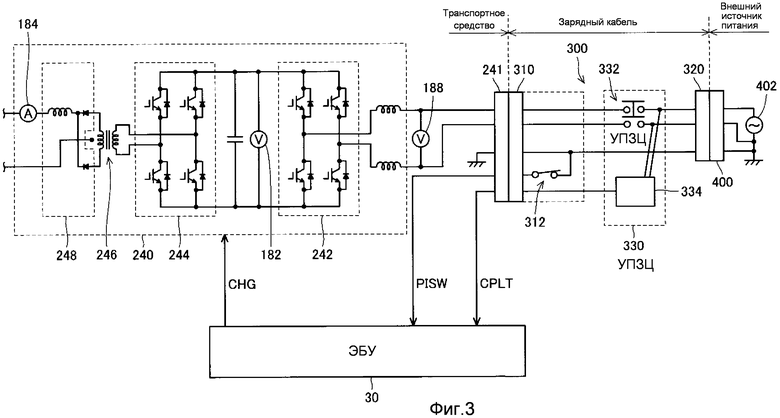
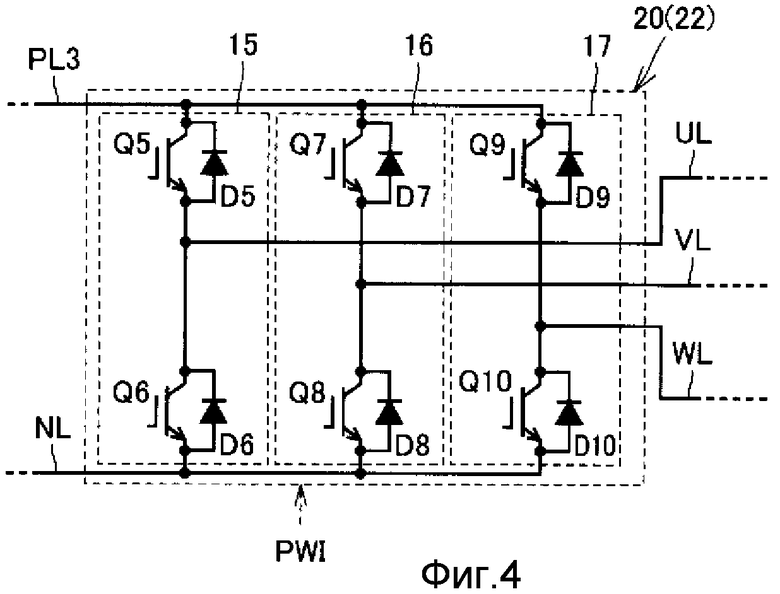
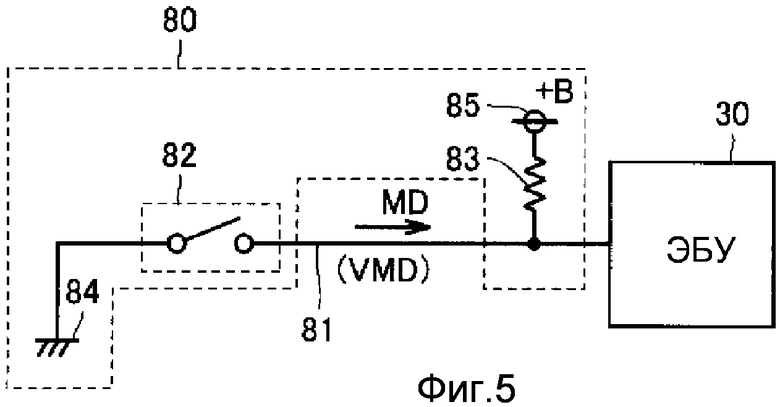
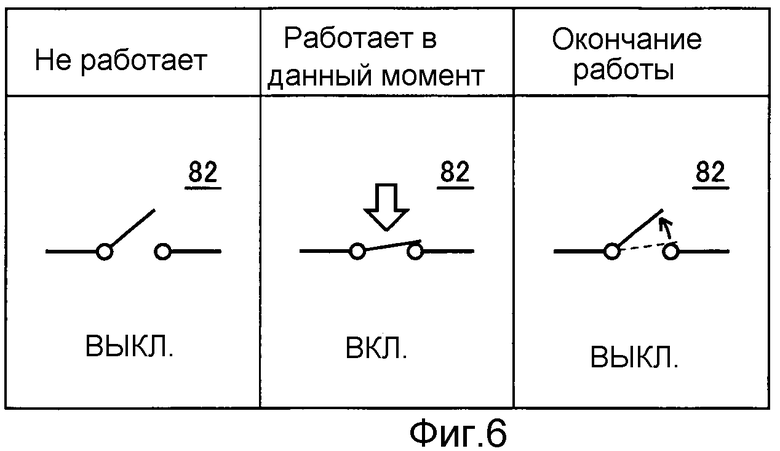
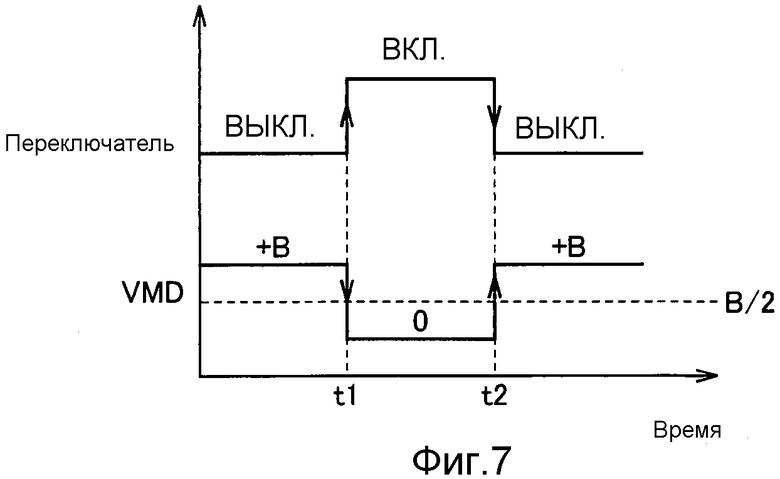
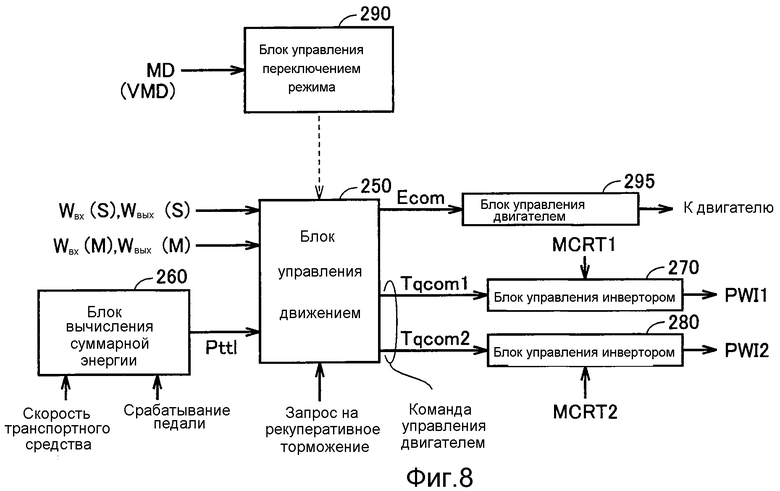
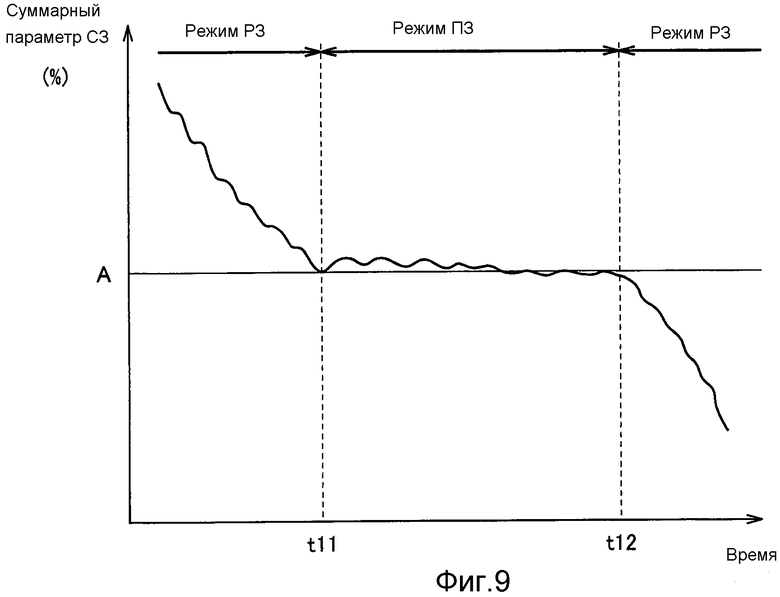
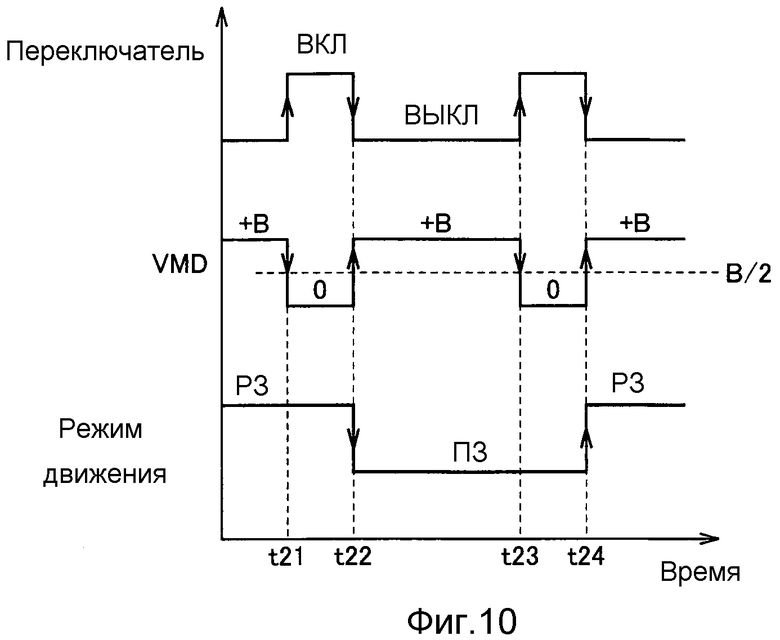
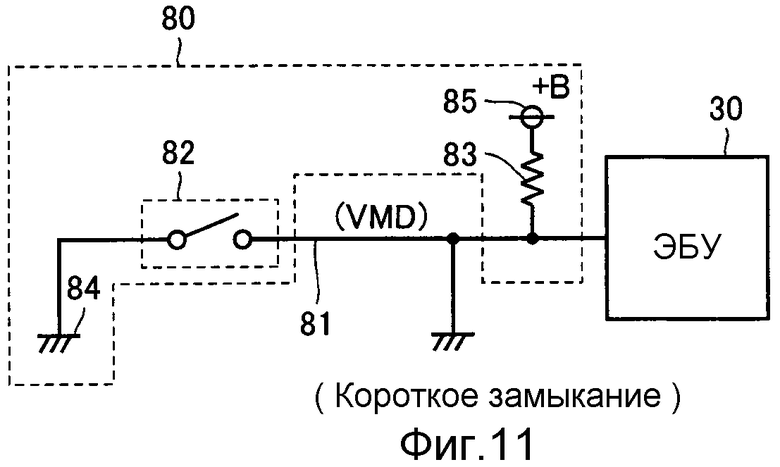
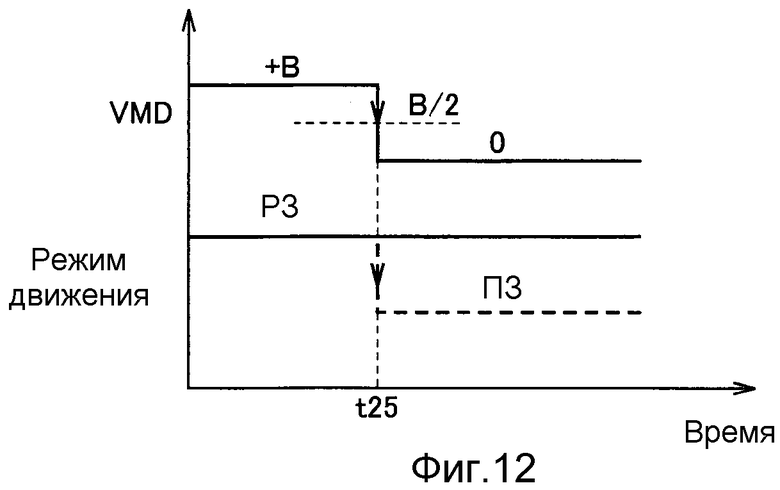
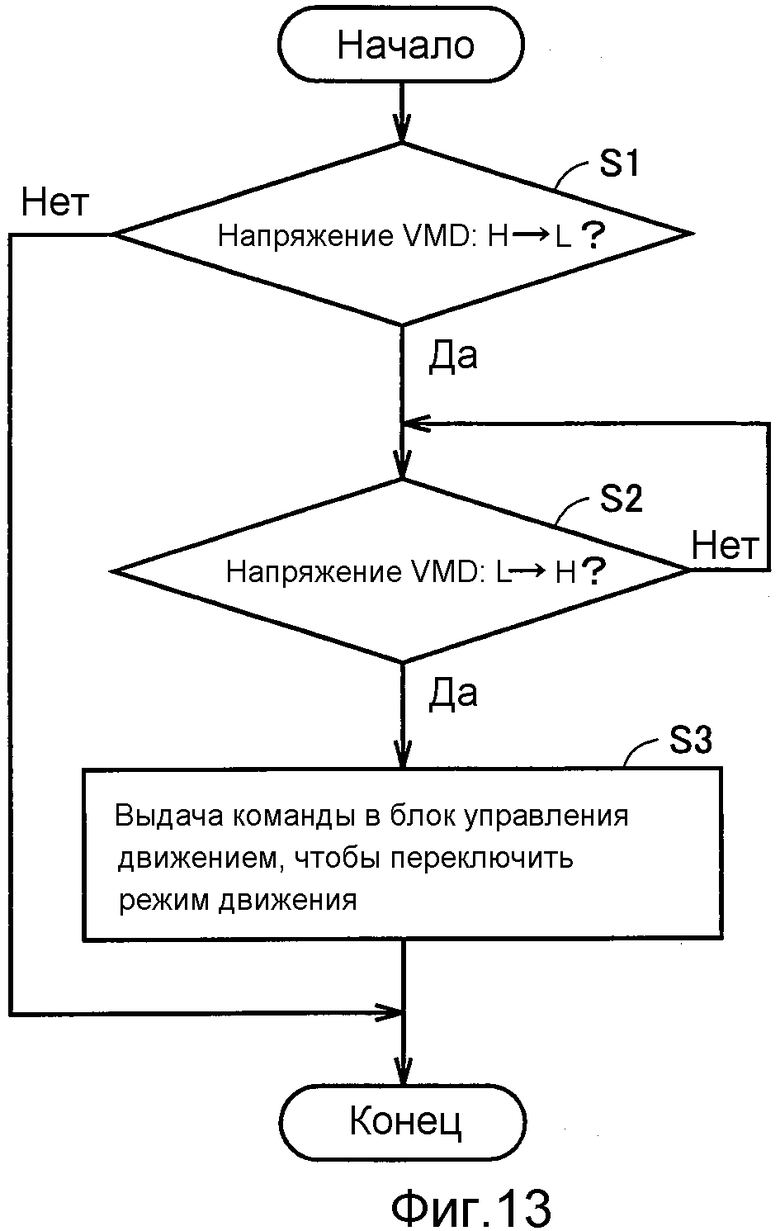
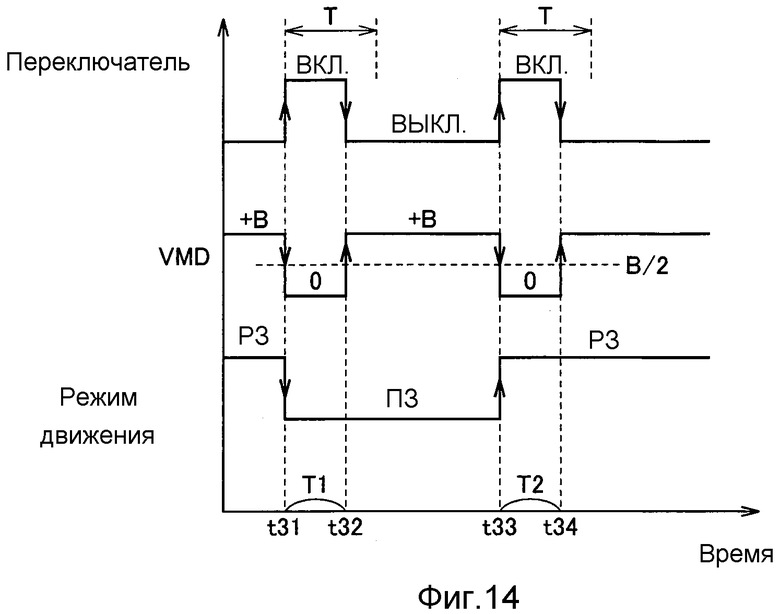
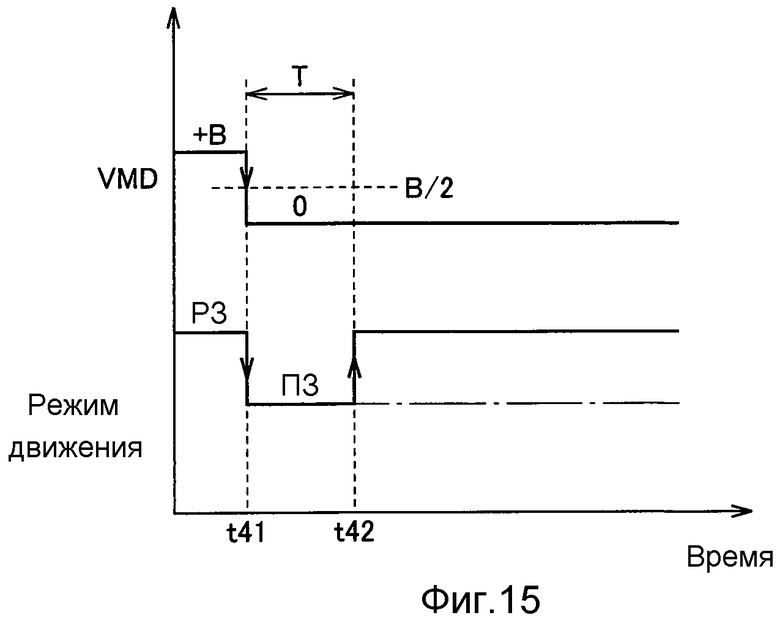
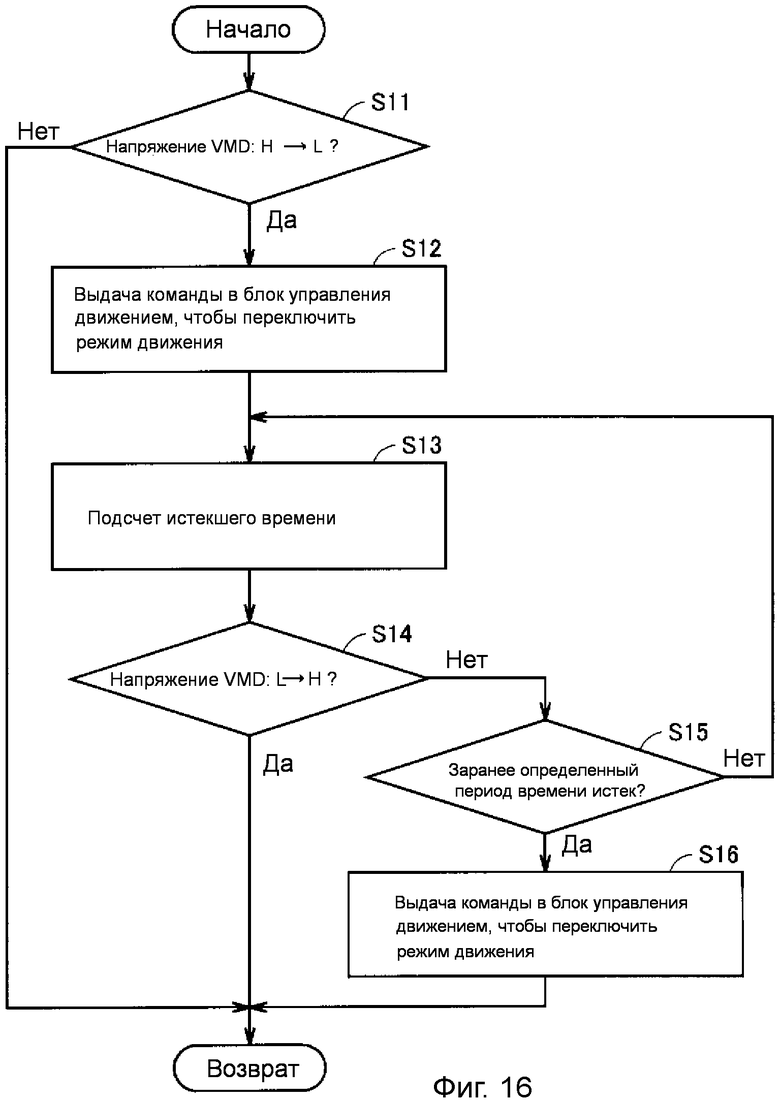
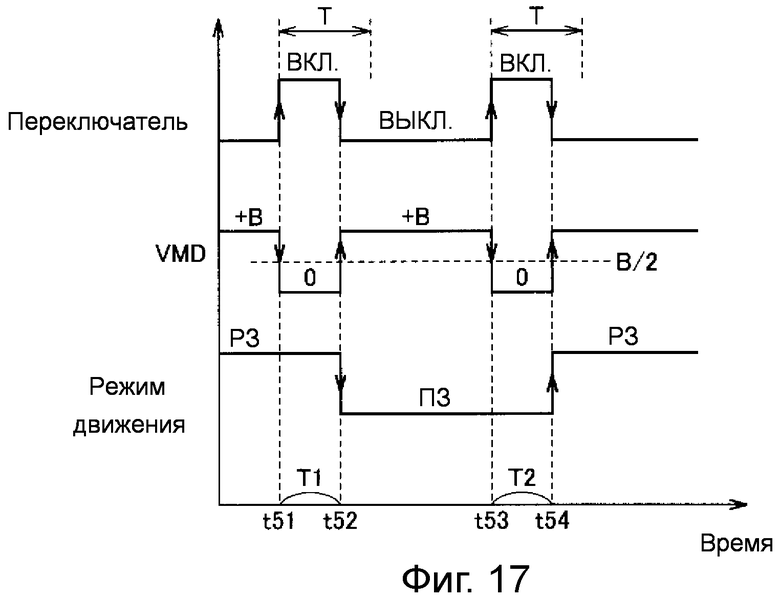
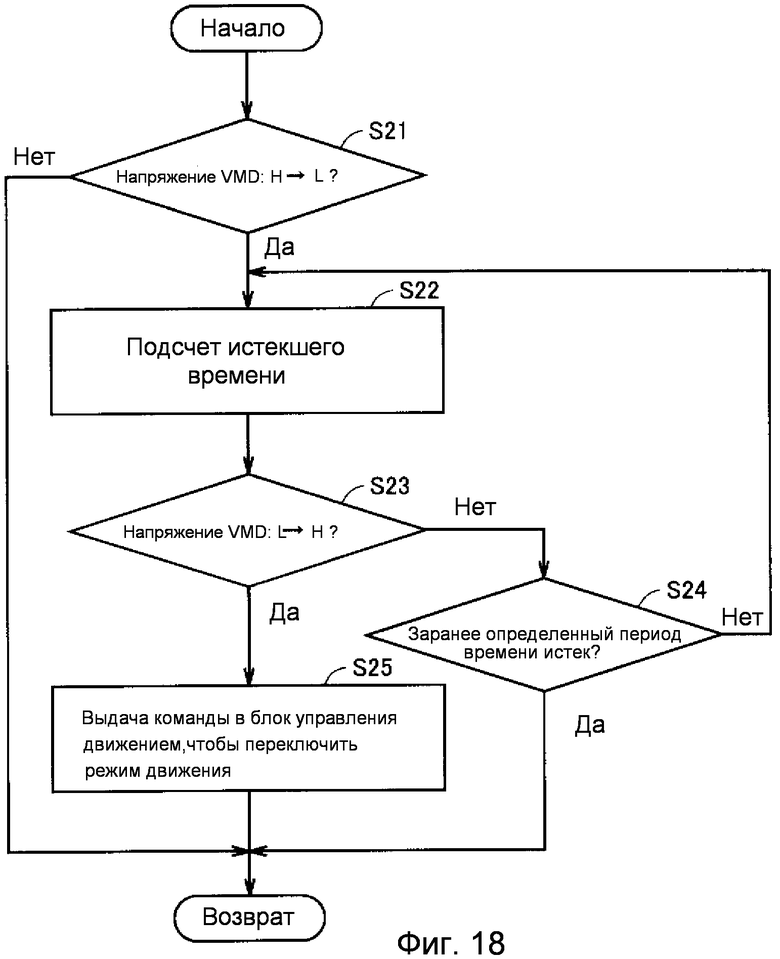
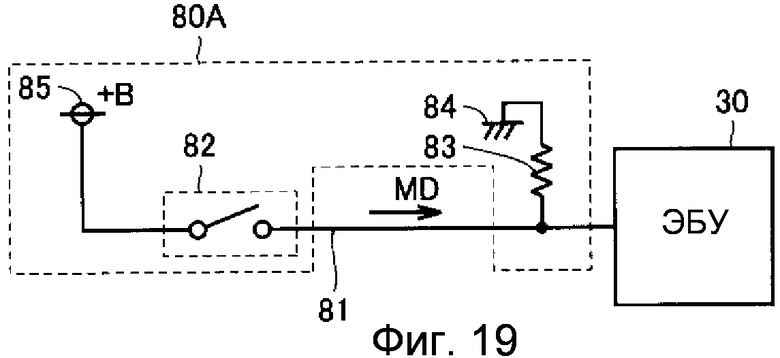
Группа изобретений относится к вариантам выполнения гибридных транспортных средств. Гибридное транспортное средство по первому, второму и третьему вариантам содержит первый и второй источники энергии, шину управления, узел первого напряжения, узел второго напряжения, переключатель уровня напряжения шины управления, устройство управления. В первом режиме используется первый источник энергии. Во втором режиме используется второй источник энергии. Устройство управления переключает режим движения гибридного транспортного средства между первым режимом и вторым режимом. Устройство управления переключает режим движения на основании изменения от первого уровня до второго уровня, которое является первым изменением. Устройство управления переключает режим движения на основании изменения от второго уровня до первого уровня, которое является вторым изменением. Устройство управления переключает режим движения при обнаружении первого и второго изменений. В транспортном средстве по второму варианту устройство управления переключает режим движения в соответствии с первым изменением. Возвращает режим движения к режиму, который был задан до базисного момента времени. Поддерживает режим движения в режиме, который был достигнут после базисного момента времени. В транспортном средстве по третьему варианту устройство управления переключает режим движения, если второе изменение происходит до истечения определенного периода времени. Если второе изменение не произошло до истечения определенного периода времени, то поддерживается режим движения, который был задан до базисного момента времени. Технический результат заключается в предотвращении ошибок в шине управления. 3 н. и 12 з.п. ф-лы, 19 ил.
1. Гибридное транспортное средство, содержащее первый и второй источники энергии, конфигурация каждого из которых обеспечивает привод гибридного транспортного средства в движение, шину (81) управления, первый узел (85), имеющий первое напряжение, второй узел (84), имеющий второе напряжение, переключатель (82), задающий уровень напряжения шины (81) управления на первом уровне, соответствующем первому напряжению, за счет электрического соединения шины (81) управления с первым узлом (85), когда ручная операция не осуществляется, и задающий уровень напряжения шины (81) управления на втором уровне, соответствующем второму напряжению, за счет электрического соединения шины (81) управления со вторым узлом (84) в течение периода, во время которого ручная операция осуществляется, и устройство (30) управления, переключающее режим движения гибридного транспортного средства между первым режимом, в котором используется первый источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, и вторым режимом, в котором используется второй источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, на основании изменения от первого уровня до второго уровня, которое является первым изменением в упомянутом уровне напряжения шины (81) управления, и изменения от второго уровня до первого уровня, которое является вторым изменением в упомянутом уровне напряжения шины (81) управления, причем устройство (30) управления переключает упомянутый режим движения между первым режимом и вторым режимом при обнаружении как первого изменения, так и второго изменения.
2. Гибридное транспортное средство по п.1, дополнительно содержащее зарядное устройство (240), конфигурация которого обеспечивает зарядку энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) с помощью электрической энергии, подаваемой из источника, внешнего по отношению к гибридному транспортному средству.
3. Гибридное транспортное средство по п.2, в котором устройство (30) управления (30) задает режим движения в первом режиме, когда движение гибридного транспортного средства начинается в первый раз после того, как заканчивается зарядка энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) зарядным устройством (240).
4. Гибридное транспортное средство по п.1, в котором первый источник энергии включает в себя вращающуюся электрическую машину (ЭДГ2), конфигурация которой обеспечивает приведение в движение ведущего колеса, и энергоаккумулирующее устройство (ВА, ВВ1, ВВ2), конфигурация которого позволяет ему аккумулировать электрическую энергию и подавать аккумулированную электрическую энергию во вращающуюся электрическую машину (ЭДГ2), а второй источник энергии включает в себя двигатель (2) внутреннего сгорания.
5. Гибридное транспортное средство по п.4, в котором первый режим вызывает приведение в действие вращающейся электрической машины (ЭДГ2) путем использования электрической энергии, аккумулированной в энергоаккумулирующем устройстве (ВА, ВВ1, ВВ2), а второй режим вызывает движение гибридного транспортного средства за счет приведения в действие двигателя (2) внутреннего сгорания.
6. Гибридное транспортное средство, содержащее первый и второй источники энергии, конфигурация каждого из которых обеспечивает привод гибридного транспортного средства в движение, шину (81) управления, первый узел (85), имеющий первое напряжение, второй узел (84), имеющий второе напряжение, переключатель (82), задающий уровень напряжения шины (81) управления на первом уровне, соответствующем первому напряжению, за счет электрического соединения шины (81) управления с первым узлом (85), когда ручная операция не осуществляется, и задающий уровень напряжения шины (81) управления на втором уровне, соответствующем второму напряжению, за счет электрического соединения шины (81) управления с упомянутым вторым узлом (84) в течение периода, во время которого ручная операция осуществляется, и устройство (30) управления, переключающее режим движения гибридного транспортного средства между первым режимом, в котором используется первый источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, и вторым режимом, в котором используется второй источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, на основании изменения от первого уровня до упомянутого второго уровня, которое является первым изменением в упомянутом уровне напряжения шины (81) управления, и изменения от второго уровня до первого уровня, которое является вторым изменением в упомянутом уровне напряжения шины (81) управления, причем устройство (30) управления переключает упомянутый режим движения между первым режимом и вторым режимом в соответствии с первым изменением и возвращает режим движения к тому режиму, который был задан до базисного момента времени, если второе изменение не происходит до истечения заранее определенного периода времени с базисного момента времени, когда произошло первое изменение, и поддерживает режим движения в том режиме, который был достигнут после базисного момента времени, если второе изменение происходит до истечения упомянутого заранее определенного периода времени с базисного момента времени.
7. Гибридное транспортное средство по п.6, дополнительно содержащее зарядное устройство (240), конфигурация которого обеспечивает зарядку энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) с помощью электрической энергии, подаваемой из источника, внешнего по отношению к гибридному транспортному средству.
8. Гибридное транспортное средство по п.7, в котором устройство (30) управления (30) задает режим движения в первом режиме, когда движение гибридного транспортного средства начинается в первый раз после того, как заканчивается зарядка энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) зарядным устройством (240).
9. Гибридное транспортное средство по п.6, в котором первый источник энергии включает в себя вращающуюся электрическую машину (ЭДГ2), конфигурация которой обеспечивает приведение в движение ведущего колеса, и энергоаккумулирующее устройство (ВА, ВВ1, ВВ2), конфигурация которого позволяет ему аккумулировать электрическую энергию и подавать аккумулированную электрическую энергию во вращающуюся электрическую машину (ЭДГ2), а второй источник энергии включает в себя двигатель (2) внутреннего сгорания.
10. Гибридное транспортное средство по п.9, в котором первый режим вызывает приведение в действие вращающейся электрической машины (ЭДГ2) путем использования электрической энергии, аккумулированной в энергоаккумулирующем устройстве (ВА, ВВ1, ВВ2), а второй режим вызывает движение гибридного транспортного средства за счет приведения в действие двигателя (2) внутреннего сгорания.
11. Гибридное транспортное средство, содержащее первый и второй источники энергии, конфигурация каждого из которых обеспечивает привод гибридного транспортного средства в движение, шину (81) управления, первый узел (85), имеющий первое напряжение, второй узел (84), имеющий второе напряжение, переключатель (82), задающий уровень напряжения шины (81) управления на первом уровне, соответствующем первому напряжению, за счет электрического соединения шины (81) управления с первым узлом (85), когда ручная операция не осуществляется, и задающий упомянутый уровень напряжения шины (81) управления на втором уровне, соответствующем второму напряжению, за счет электрического соединения шины (81) управления со вторым узлом (84) в течение периода, во время которого ручная операция осуществляется, и устройство (30) управления, переключающее режим движения гибридного транспортного средства между первым режимом, в котором используется первый источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, и вторым режимом, в котором используется второй источник энергии, имеющий более высокий приоритет для движения гибридного транспортного средства, на основании изменения от первого уровня до второго уровня, которое является первым изменением в упомянутом уровне напряжения шины (81) управления, и изменения от второго уровня до первого уровня, которое является вторым изменением в упомянутом уровне напряжения шины (81) управления, причем устройство (30) управления переключает режим движения между первым режимом и вторым режимом, если второе изменение происходит до истечения заранее определенного периода времени с базисного момента времени, когда произошло первое изменение, и поддерживает упомянутый режим движения в том режиме, который был задан до базисного момента времени, если второе изменение не произошло до истечения упомянутого заранее определенного периода времени с базисного момента времени.
12. Гибридное транспортное средство по п.11, дополнительно содержащее зарядное устройство (240), конфигурация которого обеспечивает зарядку энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) с помощью электрической энергии, подаваемой из источника, внешнего по отношению к гибридному транспортному средству.
13. Гибридное транспортное средство по п.12, в котором устройство (30) управления (30) задает режим движения в первом режиме, когда движение гибридного транспортного средства начинается в первый раз после того, как заканчивается зарядка энергоаккумулирующего устройства (ВА, ВВ1, ВВ2) зарядным устройством (240).
14. Гибридное транспортное средство по п.11, в котором первый источник энергии включает в себя вращающуюся электрическую машину (ЭДГ2), конфигурация которой обеспечивает приведение в движение ведущего колеса, и энергоаккумулирующее устройство (ВА, ВВ1, ВВ2), конфигурация которого позволяет ему аккумулировать электрическую энергию и подавать аккумулированную электрическую энергию во вращающуюся электрическую машину (ЭДГ2), а второй источник энергии включает в себя двигатель (2) внутреннего сгорания.
15. Гибридное транспортное средство по п.14, в котором первый режим вызывает приведение в действие вращающейся электрической машины (ЭДГ2) путем использования электрической энергии, аккумулированной в энергоаккумулирующем устройстве (ВА, ВВ1, ВВ2), а второй режим вызывает движение гибридного транспортного средства за счет приведения в действие двигателя (2) внутреннего сгорания.
| JP 2008128192 А, 05.06.2008 | |||
| JP 2007062639 А, 15.03.2007 | |||
| JP 9046821 А, 14.02.1997 | |||
| RU 94021360 А1, 20.03.1997. |

