ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для гибридного транспортного средства, гибридному транспортному средству, а также способу управления для гибридного транспортного средства. Более конкретно, настоящее изобретение относится к устройству управления для гибридного транспортного средства, гибридному транспортному средству, а также способу управления для гибридного транспортного средства, содержащего двигатель внутреннего сгорания, первый электродвигатель и второй электродвигатель, при этом двигатель и первый электродвигатель способны выдавать движущую силу на одну пару колес из пары передних колес и пары задних колес, причем второй электродвигатель способен выдавать движущую силу на другую пару колес из пары передних колес и пары задних колес.
2. Описание предшествующего уровня техники
[0002] В качестве гибридного транспортного средства обычно предлагалось транспортное средство, содержащее двигатель внутреннего сгорания, первый электродвигатель и второй электродвигатель, при этом двигатель и первый электродвигатель способны выдавать движущую силу на пару передних колес, а второй электродвигатель способен выдавать движущую силу на пару задних колес (см., например, публикацию японской патентной заявки No. 2005-53317). В гибридном транспортном средстве диапазон коэффициента распределения движущей силы на передние колеса, который позволяет сохранить устойчивость движения транспортного средства, устанавливается сначала на основе продольного ускорения. Далее, коэффициент распределения, который сводит к минимуму количество топлива, потребляемого в единицу времени (эффективную величину потребления топлива двигателем), устанавливается в виде коэффициента распределения движущей силы на передних колесах, при этом количество топлива, потребляемого в единицу времени, является значительным потребляемым количеством, необходимым для работы двигателя и два электродвигателей в вышеупомянутом диапазоне. Транспортное средство движется с помощью движущей силы, которая распределяется на множество коэффициентов распределения движущей силы на передние колеса. Таким образом, движущая сила распределяется посредством коэффициента распределения, который минимизирует эффективное количество топлива, потребляемого двигателем внутреннего сгорания, с тем, чтобы поддерживать стабильность движения транспортного средства при одновременном снижении количества потребляемого двигателем топлива.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В качестве гибридного транспортного средства с четырьмя ведущими колесами предложено транспортное средство, сконфигурированное для движения, при нормальном функционировании, с колесным приводом, в котором движущая сила выдается от двигателя и первого электродвигателя на пару передних колес и на пару задних колес, и для движения при выполнении поворота или при подавлении скольжения с приводом на четыре колеса, при котором часть требуемой нагрузки для движущей силы распределяется на второй электродвигатель, который выдает движущую силу на другую пару из пары передних колес и пары задних колес. В таком гибридном транспортном средстве, которое движется часть времени с приводом на четыре колеса, второй электродвигатель, который играет второстепенную роль, часто имеет относительно малую теплоемкость или имеет прикрепленное к нему охлаждающее устройство с относительно малой мощностью охлаждения. Если гибридное транспортное средство такого типа перемещается в качестве транспортного средства с приводом на четыре колеса путем постоянного распределения нагрузки для движущей силы на второй электродвигатель, как описано выше, чтобы добиться повышения эффективности использования энергии, второй электродвигатель может перегреваться.
[0004] Настоящим изобретением предложено устройство управления для гибридного транспортного средства, гибридное транспортное средство, а также способ управления для гибридного транспортного средства, способные предотвратить перегревание второго электродвигателя и при этом повысить эффективность использования энергии транспортным средством.
[0005] Первый объект настоящего изобретения относится к устройству управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя пару передних колес, пару задних колес, двигатель, первый электродвигатель, второй электродвигатель, аккумулятор, а также переключатель режимов работы и электронный блок управления. Двигатель и первый электродвигатель сконфигурированы для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес. Второй электродвигатель сконфигурирован для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес. Аккумулятор сконфигурирован для подачи электроэнергии на первый электродвигатель и второй электродвигатель. Переключатель режима работы сконфигурирован для переключения между режимом расходования заряда и режимом поддержания заряда. Электронный блок управления сконфигурирован для управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения гибридного транспортного средства. Кроме того, электронный блок управления сконфигурирован для осуществления управления таким образом, что первый коэффициент движущей силы становится больше, чем второй коэффициент движущей силы, когда гибридное транспортное средство движется в режиме расходования заряда. Первый коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме расходования заряда, второй коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
[0006] В соответствии с конфигурацией, когда гибридное транспортное средство движется в режиме расходования заряда, доля движущей силы, выданной из второго электродвигателя, в требуемой движущей силе, необходимой для движения, управляется так, чтобы быть больше, чем эта доля при движении гибридного транспортного средства в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы. То есть, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, доля движущей силы, выданной из второго электродвигателя, в требуемой движущей силе делается меньше, чем эта доля при движении гибридного транспортного средства в режиме расходования заряда. Соответственно, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, второй электродвигатель может быть удовлетворительным образом охлажден, что дает возможность предотвратить перегревание второго электродвигателя. Когда после этого гибридное транспортное средство движется в режиме расходования заряда, переключенном из режима поддержания заряда переключателем режима работы, необходимая движущая сила может выдаваться из второго электродвигателя. В это время нагрузка для движущей силы распределяется на второй электродвигатель в целях повышения эффективности использования энергии, так что эффективность использования энергии транспортного средства может быть повышена. В результате становится возможным предотвратить перегрев второго электродвигателя и достичь повышения эффективности использования энергии транспортного средства.
[0007] В устройстве управления электронный блок управления может быть сконфигурирован для управления первым электродвигателем и вторым электродвигателем, с тем, чтобы минимизировать потери на первом электродвигателе и втором электродвигателе тогда, когда гибридное транспортное средство движется в режиме расходования заряда. В соответствии с конфигурацией эффективность использования энергии транспортного средства может быть повышена. Минимизация потерь на первом электродвигателе и втором электродвигателе означает, что сумма потерь на первом электродвигателе и потерь на втором электродвигателе минимизируется в пределах диапазона, в котором соответствующие электродвигатели могут приводиться в действие. Например, когда приводные ограничения накладываются на первый электродвигатель или второй электродвигатель из-за перегрева и т.п., вышеуказанная фраза означает, что сумма потерь на первом электродвигателе и потерь на втором электродвигателе минимизируется в пределах диапазона приводных ограничений.
[0008] В устройстве управления электронный блок управления может быть сконфигурирован для управления первым электродвигателем и вторым электродвигателем с первым коэффициентом распределения движущей силы, когда гибридное транспортное средство движется в режиме поддержания заряда. Первый коэффициент распределения движущей силы может быть коэффициентом распределения движущей силы в соответствии с требованиями к параметрам движения. Кроме того, электронный блок управления может быть сконфигурирован для управления первым электродвигателем и вторым электродвигателем с коэффициентом распределения движущей силы, выбранным из первого коэффициента распределения движущей силы и второго коэффициента распределения движущей силы. Второй коэффициент распределения движущей силы может быть коэффициентом распределения движущей силы, при котором потери на первом электродвигателе и втором электродвигателе минимизированы, когда гибридное транспортное средство движется в режиме расходования заряда. В соответствии с конфигурацией становится возможным удовлетворить требованиям к параметрам движения и одновременно минимизировать потери. При этом коэффициент распределения движущей силы представляет собой долю движущей силы, распределенный на пару задних колес, во всей движущей силе. То есть когда коэффициент распределения движущей силы принимает нулевое значение, вся движущая сила распределяется на пару передних колес (100%), при этом никакой движущей силы не распределяется на пару задних колес (0%). Когда коэффициент распределения движущей силы принимает значение единицы, движущая сила не распределяется на пару передних колес (0%), при этом вся движущая сила распределяется на пару задних колес (100%).
[0009] В устройстве управления электронный блок управления может быть сконфигурирован для осуществления управления таким образом, что второй коэффициент движущей силы становится меньше, чем третий коэффициент движущей силы, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы. Третий коэффициент движущей силы может представлять собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда из-за уменьшения состояния заряда аккумулятора. В соответствии с конфигурацией, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, второй электродвигатель может дополнительно охлаждаться в дополнительной степени. Кроме того, когда после этого гибридное транспортное средство движется в режиме расходования заряда, переключенном из режима поддержания заряда переключателем режима работы, характеристики второго электродвигателя могут быть продемонстрированы в достаточной степени. В результате становится возможным предотвратить перегрев второго электродвигателя и при этом дополнительно повысить эффективность использования энергии транспортного средства.
[0010] В устройстве управления электронный блок управления может быть сконфигурирован для осуществления управления по выдаче движущей силы из второго электродвигателя только тогда, когда электронный блок управления определяет, что требуется движение с четырехколесным приводом, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы. В соответствии с конфигурацией, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, частота подключения второго электродвигателя может быть уменьшена, так что второй электродвигатель может охлаждаться более удовлетворительным образом.
[0011] Второй объект настоящего изобретения представляет собой гибридное транспортное средство. Гибридное транспортное средство включает в себя пару передних колес, пару задних колес, двигатель, первый электродвигатель, второй электродвигатель, аккумулятор, переключатель режима работы и электронный блок управления. Двигатель и первый электродвигатель сконфигурированы для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес. Второй электродвигатель сконфигурирован для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес. Аккумулятор сконфигурирован для накапливания электроэнергии от первого электродвигателя и второго электродвигателя. Переключатель режима работы сконфигурирован для переключения между режимом расходования заряда и режимом поддержания заряда. Электронный блок управления сконфигурирован для управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения гибридного транспортного средства. Кроме того, электронный блок управления сконфигурирован для осуществления управления таким образом, что первый коэффициент движущей силы становится больше, чем второй коэффициент движущей силы, когда гибридное транспортное средство движется в режиме расходования заряда. Первый коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме расходования заряда. Второй коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
[0012] В соответствии с конфигурацией, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, второй электродвигатель может в удовлетворительной степени охлаждаться, что дает возможность предотвратить перегревание второго электродвигателя. Когда после этого гибридное транспортное средство движется в режиме расходования заряда, переключенном из режима поддержания заряда переключателем режима работы, необходимая движущая сила может выдаваться из второго электродвигателя. В это время нагрузка движущей силы распределяется на второй электродвигатель с тем, чтобы повысить эффективность использования энергии, так что эффективность использования энергии транспортного средства может повыситься. В результате становится возможным предотвратить перегрев второго электродвигателя при достижении повышенной эффективности использования энергии транспортного средства.
[0013] Третий объект настоящего изобретения представляет собой способ управления для гибридного транспортного средства. Гибридное транспортное средство включает в себя пару передних колес, пару задних колес, двигатель, первый электродвигатель, второй электродвигатель, аккумулятор, переключатель режима работы и электронный блок управления. Двигатель и первый электродвигатель сконфигурированы для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес. Второй электродвигатель сконфигурирован для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес. Аккумулятор сконфигурирован для накапливания электроэнергии от первого электродвигателя и второго электродвигателя. Переключатель режима работы сконфигурирован для переключения между режимом расходования заряда и режимом поддержания заряда. Способ управления включает в себя: управление двигателем внутреннего сгорания, первым электродвигателем, и вторым электродвигателем таким образом, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения гибридного транспортного средства; а также осуществление управления таким образом, что первый коэффициент движущей силы становится больше, чем второй коэффициент движущей силы, когда гибридное транспортное средство движется в режиме расходования заряда. Первый коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме расходования заряда. Второй коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
[0014] В соответствии с конфигурацией, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном переключателем режима работы, второй электродвигатель может в удовлетворительной степени охлаждаться, что дает возможность предотвратить перегревание второго электродвигателя. Когда после этого гибридное транспортное средство движется в режиме расходования заряда, переключенном из режима поддержания заряда переключателем режима работы, необходимая движущая сила может выдаваться из второго электродвигателя. В это время нагрузка для движущей силы распределяется на второй электродвигатель с тем, чтобы повысить эффективность использования энергии, так что эффективность использования энергии транспортного средства может повыситься. В результате становится возможным предотвратить перегрев второго электродвигателя при достижении повышенной эффективности использования энергии транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Признаки, преимущества, а также и техническая и промышленная значимость примеров осуществления настоящего изобретения будут описаны ниже со ссылками на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
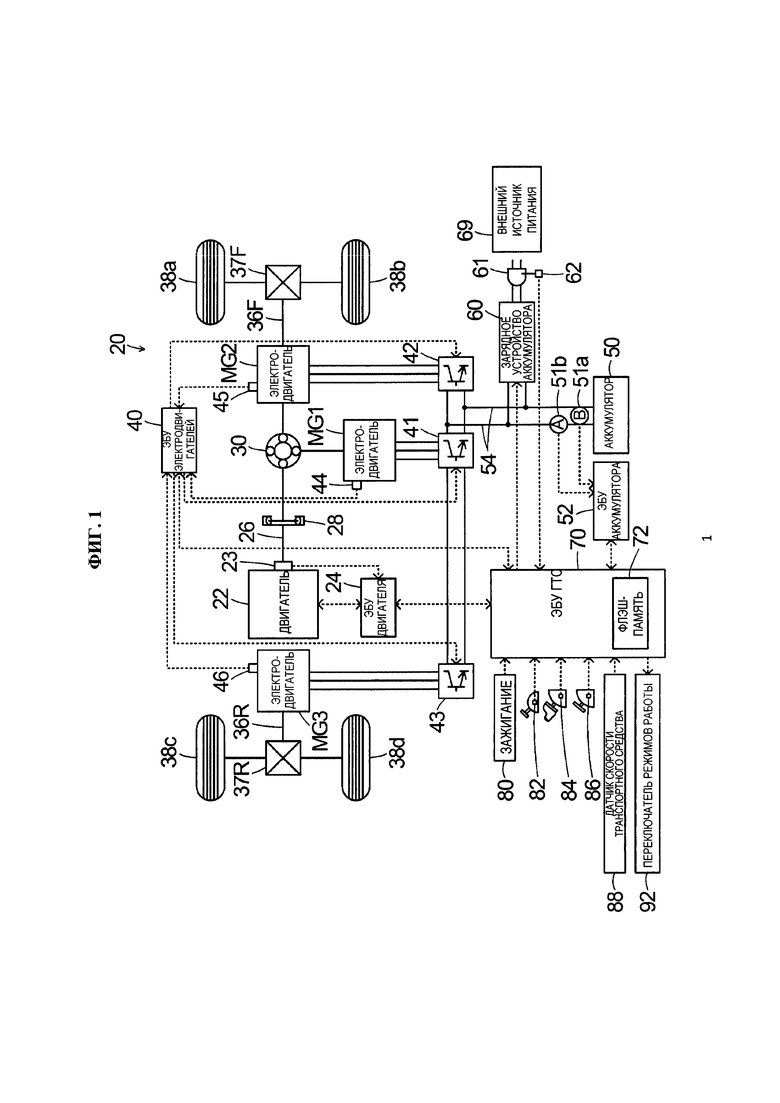
Фиг. 1 представляет собой схему, иллюстрирующую в общих чертах конфигурацию гибридного транспортного средства 20 в качестве примера осуществления настоящего изобретения;
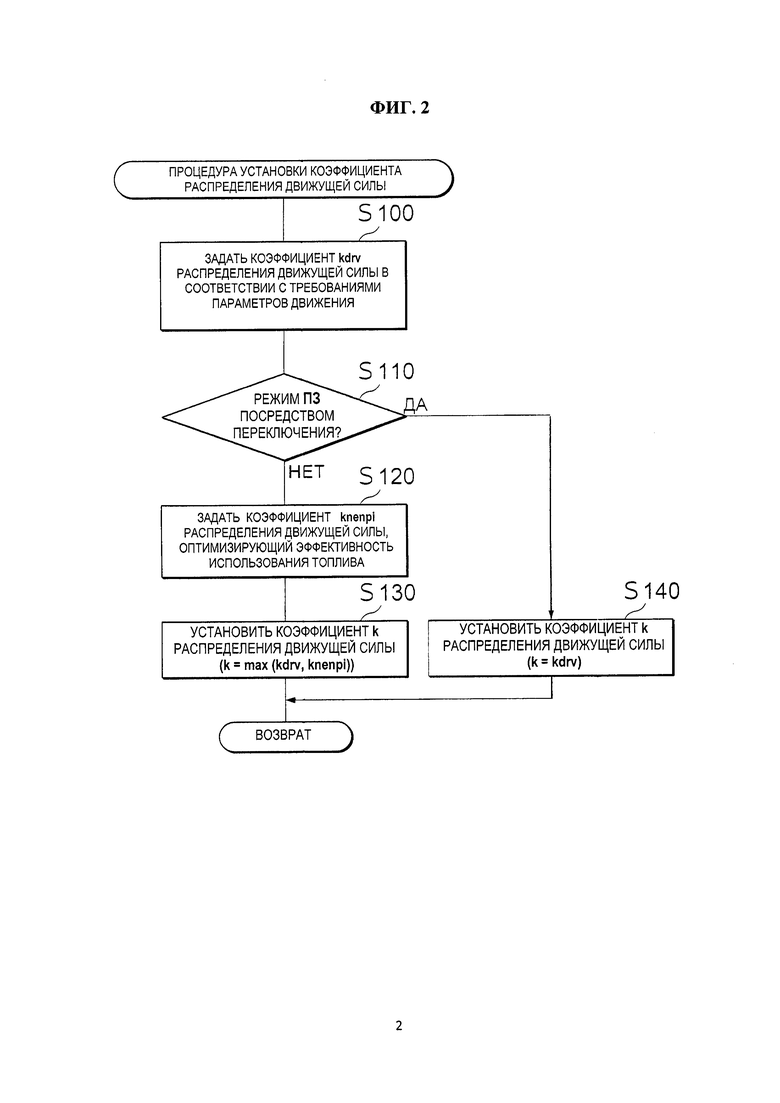
Фиг. 2 представляет собой блок-схему, иллюстрирующую пример процедуры установки коэффициента распределения движущей силы, выполняемой ГТСЭБУ 70;
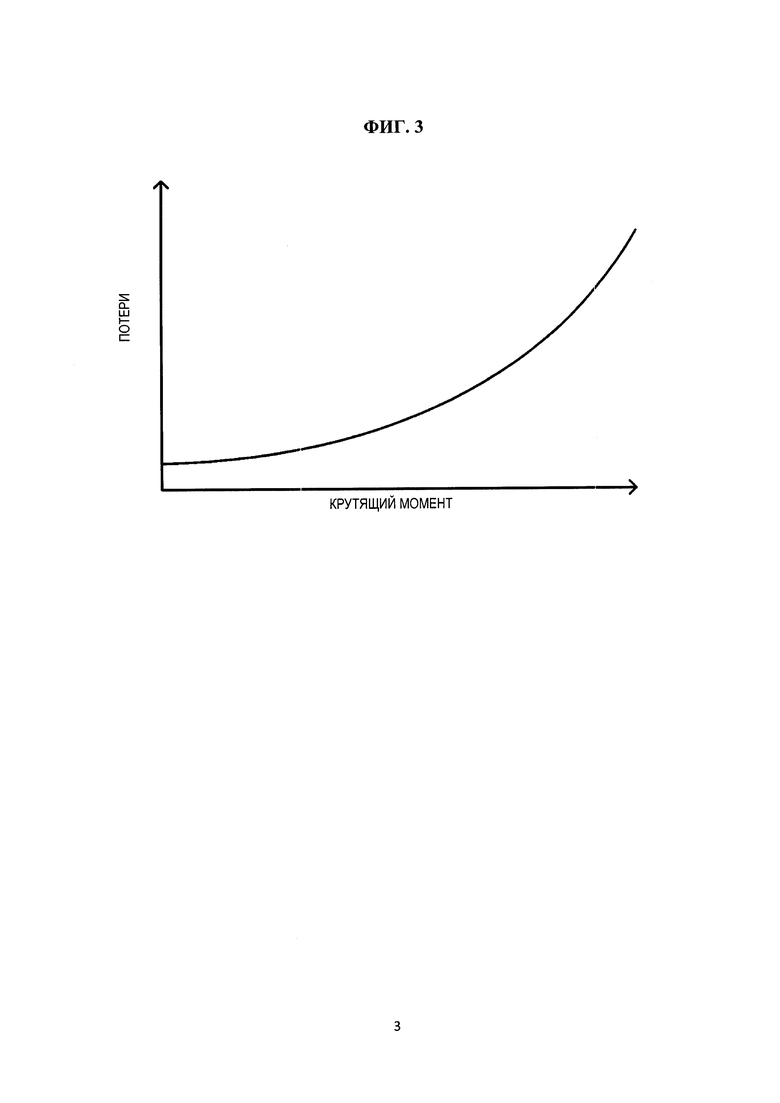
Фиг. 3 представляет собой график характеристик, иллюстрирующий пример соотношения между выходным крутящим моментом электродвигателя и потерями на электродвигателе;
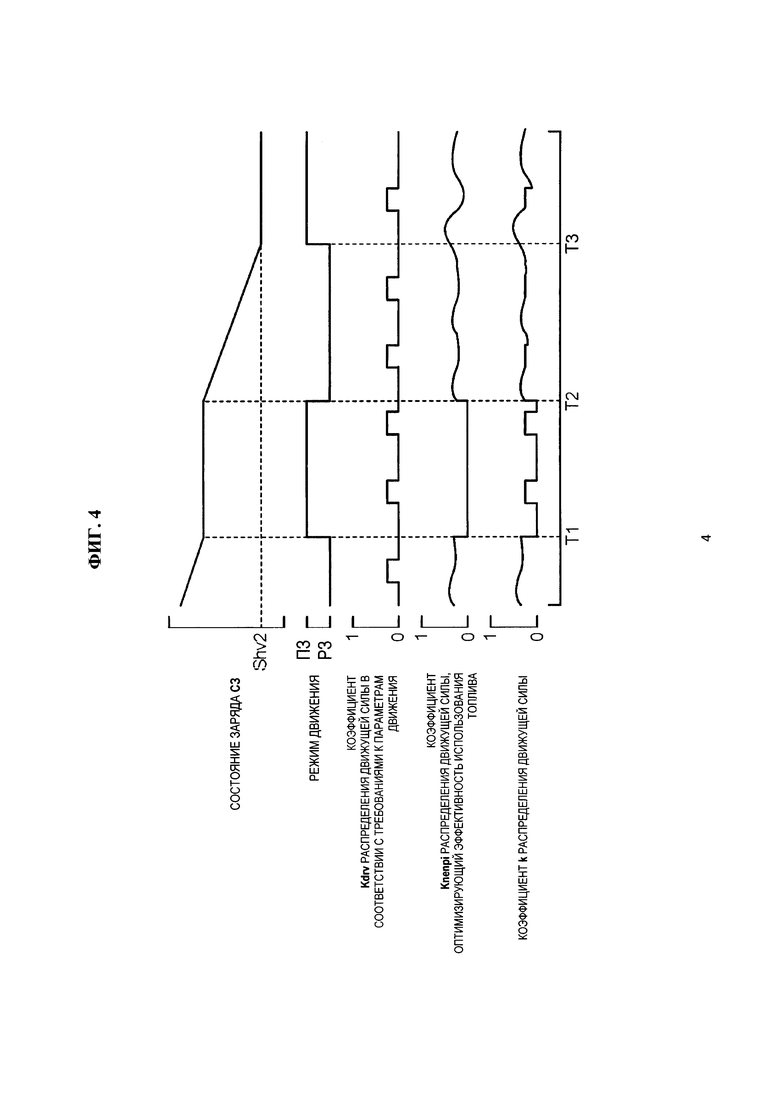
Фиг. 4 представляет собой временную диаграмму, иллюстрирующую пример изменения во времени состояния заряда СЗ, режима движения и коэффициентов k распределения движущей силы; и
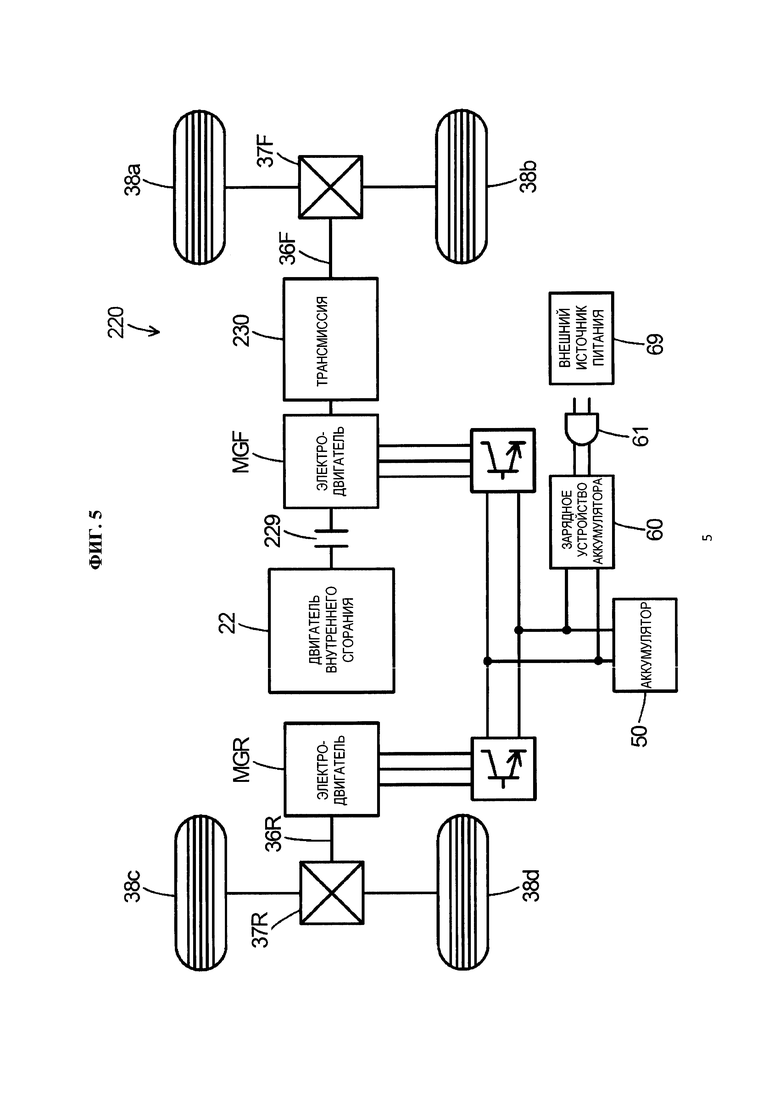
Фиг. 5 представляет собой схему, иллюстрирующую в общих чертах конфигурацию гибридного транспортного средства 220 как модификации.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
[0016] Теперь на основе примера осуществления изобретения будет более подробно описан вид выполнения настоящего изобретения.
[0017] Фиг. 1 представляет собой схему, иллюстрирующую в общих чертах конфигурацию гибридного транспортного средства 20 в качестве примера осуществления настоящего изобретения. Как показано на чертеже, гибридное транспортное средство 20 согласно этому примеру осуществления изобретения включает в себя двигатель 22, планетарную передачу 30, электродвигатели MG1, MG2, MG3, инверторы 41, 42, 43, аккумулятор 50, зарядное устройство 60 аккумулятора, и электронный блок 70 управления гибридного транспортного средства (далее именуемый ЭБУ 70 ГТС).
[0018] Двигатель 22 сконфигурирован как двигатель внутреннего сгорания, который выдает движущую силу, используя топливо, такое как бензин и дизельное топливо, из топливного бака 25. Работа двигателя 22 управляется электронным блоком 24 управления двигателя (далее именуемым ЭБУ двигателя).
[0019] Хотя это и не показано на чертежах, блок ЭБУ 24 двигателя выполнен как микропроцессор, имеющий центральный процессор (ЦП) в качестве основного компонента. ЭБУ 24 двигателя включает в себя, в дополнение к ЦП, ПЗУ, которое хранит программы обработки, ОЗУ, которое временно хранит данные, входной и выходной порты, а также коммуникационный порт. ЭБУ 24 двигателя принимает сигналы от различных датчиков, необходимые для управления работой двигателя 22. Примеры сигналов, поступающих в ЭБУ 24 двигателя через входной порт, включают в себя сигнал угла θсr поворота коленчатого вала от датчика 23 положения коленчатого вала, выполненного с возможностью определять вращательное положение коленчатого вала 26 двигателя 22. ЭБУ 24 двигателя выдает различные управляющие сигналы для управления работой двигателя 22 через выходной порт. ЭБУ 24 двигателя соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 24 двигателя вычисляет число оборотов Ne двигателя 22 на основе угла θсr поворота коленчатого вала от датчика 23 положения коленчатого вала.
[0020] Планетарная передача 30 выполнена как механизм планетарной передачи одноступенчатого типа. Планетарная передача 30 имеет солнечную шестерню, соединенную с ротором электродвигателя MG1. Планетарная передача 30 имеет коронную шестерню, соединенную с ведущим валом 36F, соединенным с парой передних колес 38а, 38b через дифференциал 37F. Планетарная передача 30 имеет водило, соединенное с коленчатым валом 26 двигателя 22 через амортизатор 28.
[0021] Электродвигатель MG1, который сконфигурирован, например, как синхронный генератор-электродвигатель, имеет ротор, соединенный с солнечной шестерней планетарной передачи 30, как указано выше. Электродвигатель MG2, который сконфигурирован, например, как синхронный генератор-электродвигатель, имеет ротор, соединенный с ведущим валом 36F. Электродвигатель MG3, который сконфигурирован, например, как синхронный генератор-электродвигатель, имеет ротор, соединенный с ведущим валом 36R. Ведущий вал 36R соединен с парой задних колес 38с, 38d через дифференциал 37R. Инверторы 41, 42, 43 соединены с аккумулятором 50 через линию 54 электропитания. Электродвигатели MG1, MG2, MG3 вращательно приводятся в действие, когда электронный блок 40 управления электродвигателями (далее именуемый ЭБУ электродвигателей) выполняет управление переключением множеством не показанных на фигурах переключающих элементов инверторов 41, 42, 43.
[0022] Хотя это и не показано, ЭБУ 40 электродвигателей выполнен как микропроцессор, имеющий ЦП в качестве основного компонента. ЭБУ 40 электродвигателей включает в себя, в дополнение к ЦП, ПЗУ, которое хранит программы обработки, ОЗУ, которое временно хранит данные, входной и выходной порты и коммуникационный порт. ЭБУ 40 электродвигателей принимает входные данные сигналов от различных датчиков, необходимых для управления работой электродвигателей MG1, MG2, MG3. Примеры сигналов, входящих в ЭБУ 40 электродвигателей через входной порт, включают в себя сигналы угловых положений θm1, θm2, θm3 от датчиков 44, 45, 46 определения углового положения роторов электродвигателей MG1, MG2, MG3. ЭБУ 40 электродвигателей через выходной порт выдает сигналы, такие как сигнал управления переключением, на множество не показанных на фигурах переключающих элементов инверторов 41, 42, 43. ЭБУ 40 электродвигателей соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 40 вычисляет число оборотов Nm1, Nm2, Nm3 электродвигателей MG1, MG2, MG3 на основе угловых положений θm1, θm2, θm3 роторов электродвигателей MG1, MG2, MG3 от датчиков 44, 45, 46 определения углового положения.
[0023] Аккумулятор 50 выполнен, например, как литий-ионный вспомогательный аккумулятор или никель-водородный вспомогательный аккумулятор. Аккумулятор 50 соединен с инверторами 41, 42 через линию 54 электропитания, как указано ранее. Аккумулятор 50 управляется электронным блоком 52 управления аккумулятора (далее именуемым ЭБУ аккумулятора).
[0024] Хотя это и не показано, ЭБУ 52 аккумулятора сконфигурирован как микропроцессор, имеющий ЦП в качестве основного компонента. ЭБУ 52 аккумулятора включает в себя, в дополнение к ЦП, ПЗУ, которое хранит программы обработки, ОЗУ, которое временно хранит данные, входной и выходной порты и коммуникационный порт. ЭБУ 52 аккумулятора принимает сигналы от различных датчиков, необходимые для управления работой двигателя 22. Примеры сигналов, поступающих в ЭБУ 52 аккумулятора через входной порт, включают в себя сигнал напряжения Vb аккумулятора от датчика 51а напряжения, расположенного между клеммами аккумулятора 50, и сигнал тока Ib аккумулятора от датчика 51b тока, соединенного с выходной клеммой аккумулятора 50. ЭБУ 52 аккумулятора соединен с ЭБУ 70 ГТС через коммуникационный порт. ЭБУ 52 аккумулятора вычисляет состояние заряда СЗ на основе суммарного значения тока Ib аккумулятора от датчика 51b тока. Состояние заряда СЗ связано с отношением количества электроэнергии, полученного из аккумулятора 50, к общей емкости аккумулятора 50.
[0025] Зарядное устройство 60 аккумулятора соединено с линией 54 электропитания. Зарядное устройство 60 аккумулятора выполнено как аккумулятор, который может извне зарядить аккумулятор 50 электроэнергией от внешнего источника 69 питания, такого как бытовой источник питания и промышленный источник питания, когда штекер 61 источника питания зарядного устройства 60 аккумулятора соединен с внешним источником 69 питания в пункте подзарядки, например, по месту жительства или на зарядной станции.
[0026] Хотя это и не показано, ЭБУ 70 ГТС сконфигурирован как микропроцессор, имеющий ЦП в качестве основного компонента. ЭБУ 70 ГТС включает в себя, в дополнение к ЦП, ПЗУ, которое хранит программы обработки, ОЗУ, которое временно хранит данные, флэш-память 72, выходной и входной порты и коммуникационный порт. ЭБУ 70 ГТС принимает входные сигналы от различных датчиков через входной порт. Примеры входных сигналов в ЭБУ 70 ГТС включают в себя сигнал зажигания от замка 80 зажигания, сигнал положения SP переключения передач от датчика 82 положения переключения передач, сигнал степени открытия Асc акселератора от датчика 84 положения педали акселератора, и сигнал положения BP педали тормоза от датчика 86 положения педали тормоза. Примеры сигналов также включают в себя сигнал скорости V транспортного средства от датчика скорости 88 транспортного средства, сигнал переключения от переключателя 92 режима работы, сигнал подключения от коммутатора 62 соединения, прикрепленного к штекеру 61 источника питания, с тем, чтобы определить, соединен ли или нет штекер 61 источника питания с внешним источником питания 69. ЭБУ 70 ГТС через выходной порт выдает различные управляющие сигналы, такие как управляющий сигнал на зарядное устройство 60. Как описано ранее, ЭБУ 70 ГТС соединен с ЭБУ 24 двигателя, ЭБУ 40 электродвигателей и ЭБУ 52 аккумулятора через коммуникационный порт.
[0027] Гибридное транспортное средство 20, сконфигурированное таким образом согласно этому примеру осуществления изобретения, выполняет гибридное движение (далее именуемое движением ГТС) или движение с электрическим приводом (далее именуемое движением ЭТС) в режиме расходования заряда (далее именуемом режимом РЗ) или режиме поддержания заряда (далее именуемом режимом ПЗ). При этом режим РЗ представляет собой режим, который имеет приоритетом более движение ЭТС, чем режим ПЗ. Движение ГТС представляет собой режим движения с участием двигателя 22. Движение ЭТС представляет собой режим движения без участия двигателя 22.
[0028] Согласно этому примеру осуществления изобретения, ЭБУ 70 ГТС управляет зарядным устройством 60 аккумулятора таким образом, что аккумулятор 50 заряжается электроэнергией от внешнего источника питания 69, когда штекер 61 источника питания соединен с внешним источником питания 69, в то время как транспортное средство находится на стоянке в пункте подзарядки, например, по месту жительства или на зарядной станции с выключенной системой транспортного средства (остановленной системой). Если состояние заряда СЗ аккумулятора 50 больше порогового значения Shv1 (который принимает значение, например, 45%, 50% и 55%), когда система включена (система запущена), ЭБУ 70 ГТС управляет гибридным транспортным средством 20 так, чтобы оно не двигалось в режиме РЗ, пока состояние заряда СЗ аккумулятора 50 не достигнет пороговых значений Shv2 (например, 25%, 30% и 35%) или менее. После того, как состояние заряда СЗ аккумулятора 50 достигает порогового значения Shv2 или менее, ЭБУ 70 ГТС управляет гибридным транспортным средством 20 так, чтобы оно двигалось в режиме ПЗ, пока система гибридного транспортного средства 20 не выключится. Если состояние заряда СЗ аккумулятора 50 равно или меньше, чем пороговое значение Shv1, когда система включена, ЭБУ 70 ГТС управляет гибридным транспортным средством 20 так, чтобы оно двигалось в режиме ПЗ до тех пор, пока система не выключится. Когда переключатель 92 режима работы работает в то время, как гибридное транспортное средство 20 движется в режиме РЗ, ЭБУ 70 ГТС управляет гибридным транспортным средством 20 так, чтобы оно двигалось в режиме ПЗ. Когда переключатель 92 режима работы срабатывает снова в то время, когда гибридное транспортное средство 20 движется в режиме ПЗ, выбранном функционированием переключателя 92 режима работы, ЭБУ 70 ГТС управляет гибридным транспортным средством 20 так, чтобы оно двигалось в режиме РЗ.
[0029] Обычно движение ЭТС имеет описанное ниже приводное управление. Сначала ЭБУ 70 ГТС устанавливает требуемый крутящий момент Тr* на основе степени открытия Асc акселератора и скорости V транспортного средства. Далее ЭБУ 70 ГТС задает управляющее значение Tm1* крутящего момента электродвигателя MG1 равным нулевому значению и задает управляющие значения Тm2*, Тm3* крутящего момента электродвигателей MG2, MG3 таким образом, что требуемый крутящий момент Тr* выдается на ведущие валы 36F, 36R при коэффициенте k распределения движущей силы в диапазоне входных-выходных ограничений Win, Wout аккумулятора 50. Коэффициент k распределения движущей силы представляет собой коэффициент распределения на пару задних колес 38c, 38d в этом примере осуществления изобретения. Когда k=0, вся движущая сила распределяется на пару передних колес 38а, 38b (100%), в то время, как на пару задних колес 38с, 38d (0%) движущая сила не распределяется. Когда k=1, движущая сила не распределяется на пару передних колес 38а, 38b (0%), в то время, как вся движущая сила распределяется на пару задних колес 38с, 38d (100%). При приемке управляющих значений Tm1*, Tm2*, Тm3* крутящего момента, ЭБУ 40 электродвигателей выполняет управление переключением переключающих элементов инверторов 41, 42, 43 таким образом, что электродвигатели MG1, MG2, MG3 приводятся в действие управляющими значениями Tm1*, Tm2*, Тm3* крутящего момента.
[0030] Обычно движение ГТС имеет следующее приводное управление. Сначала ЭБУ 70 ГТС устанавливает требуемый крутящий момент Тr*, необходимый для движения, основанный на степени открытия Асc акселератора и скорости V транспортного средства. Далее ЭБУ 70 ГТС вычисляет движущую мощность Pdrv*, необходимую для движения, путем умножения требуемого крутящего момента Тr* на число оборотов Nr ведущего вала 36F. Например, число оборотов Nr ведущего вала 36F представляет собой число оборотов, полученное умножением числа оборотов Nm2 электродвигателя MG 2 или скорости V транспортного средства на масштабирующий множитель. Далее ЭБУ 70 ГТС определяет требуемую мощность Рe* запроса, необходимую для транспортного средства, при этом требуемую мощность Ре* получают путем вычитания требуемой мощности Рb* зарядки-разрядки (которая принимает положительное значение во время разрядки из аккумулятора 50) аккумулятора 50 на основе состояния заряда СЗ аккумулятора 50 из движущей мощности Pdrv*. Когда требуемая мощность Рe* выдается из двигателя 22, ЭБУ 70 ГТС задает целевое число оборотов Ne* и целевой крутящий момент Тe* двигателя 22, и управляющие значения Tm1*, Tm2*, Тm3* крутящего момента электродвигателей MG1, MG2, MG3. ЭБУ 70 ГТС затем передает заданное целевое число оборотов Ne* и целевой крутящий момент Тe* двигателя 22, а также управляющие значения Tm1*, Tm2*, Тm3* крутящего момента электродвигателей MG1, MG2, MG3, на ЭБУ 24 двигателя и ЭБУ 40 электродвигателей. Целевое число оборотов Ne* и целевой крутящий момент Те* двигателя 22 и управляющие значения Tm1*, Tm2*, Тm3* крутящего момента электродвигателей MG1, MG2, MG3 установлены так, что требуемый крутящий момент Тr* выдается на ведущие валы 36F, 36R в диапазоне входных-выходных ограничений Win, Wout аккумулятора 50. Целевое число оборотов Ne* и целевой крутящий момент Тe* двигателя 22 двигателя задаются на основе линии работы при оптимальной топливной эффективности, установленной для эффективной выдачи требуемой мощности Рe* от двигателя 22. Управляющее значение Tm1* крутящего момента электродвигателя MG1 задается на основе управления с обратной связью, при этом двигатель 22 работает при целевом числе оборотов Ne* или целевом крутящем моменте Тe*. Управляющие значения Тm2*, Тm3* крутящего момента электродвигателей MG2, MG3 задаются так, что требуемый крутящий момент Тr* выдается на ведущие валы 36F, 36R при коэффициенте k распределения движущей силы в диапазоне входных-выходных ограничений Win, Wout аккумулятора 50. ЭБУ 24 двигателя, на который поступают данные о целевом числе оборотов Ne* и целевом крутящем моменте Те*, выполняет управление, например, управление количеством всасываемого воздуха, управление впрыском топлива и управление зажиганием двигателя 22 таким образом, что двигатель 22 работает с целевым числом оборотов Ne* и целевым крутящим моментом Тe*. При поступлении управляющих значений Tm1*, Tm2*, Тm3* крутящего момента, ЭБУ 40 электродвигателей выполняет управление переключением переключающих элементов инверторов 41, 42, 43 таким образом, что электродвигатели MG1, MG2, MG3 приводятся в действие управляющими значениями Tm1*, Tm2*, Тm3* крутящего момента.
[0031] Теперь будет дано описание работы сконфигурированного таким образом гибридного транспортного средства 20 согласно этому примеру осуществления изобретения. Описание, в частности, относится к действиям по заданию коэффициента K распределения движущей силы, когда режим гибридного транспортного средства 20 переключается из режима РЗ в и режим ПЗ посредством переключателя 92 режима работы во время движения гибридного транспортного средства 20, и действиям по заданию коэффициента k распределения движущей силы, когда режим гибридного транспортного средства 20 переключается снова в режим РЗ посредством переключателя 92 режима работы во время движения гибридного транспортного средства 20. Фиг. 2 представляет собой блок-схему, иллюстрирующую пример процедуры установки коэффициента распределения движущей силы, выполняемой ЭБУ 70 ГТС. Процедура периодически выполняется каждый заданный промежуток времени (например, несколько миллисекунд или несколько десятков миллисекунд).
[0032] После того, как процедура установки коэффициента распределения движущей силы выполнена, блок ЭБУ 70 ГТС сначала задает коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения (этап S100). Согласно этому примеру осуществления изобретения, когда определено, что привод на четыре колеса необходим на основе угла поворота рулевого колеса от непоказанного датчика угла поворота рулевого колеса, коэффициент Kdrv распределения движущей силы в соответствии с требованиями к параметрам движения задается равным значению, заранее заданному для рулевого управления. Когда определено, что привод на четыре колеса необходим из-за скользкой дороги, вызванной снегопадами и т.п., коэффициент Kdrv распределения движущей силы задается равным предварительно установленному значению для предотвращения скольжения. Кроме того, когда установлено, что привод на четыре колеса не является необходимым, коэффициент Kdrv распределения движущей силы задается равным нулевому значению.
[0033] Далее ЭБУ 70 ГТС определяет, действует ли или нет переключатель 92 режима работы для переключения режима РЗ в режим ПЗ (этап S110). ЭБУ 70 ГТС задает коэффициент knenpi распределения движущей силы, который обеспечивает оптимальную эффективность использования топлива, когда режим РЗ не переключается на режим ПЗ действием переключателя 92 режима работы (этап S120). Коэффициент knenpi распределения движущей силы, который обеспечивает оптимальную эффективность использования топлива, задается, чтобы минимизировать суммарные потери на электродвигателе MG2 и электродвигателе MG3. Фиг. 3 представляет собой график характеристик, иллюстрирующий один пример соотношения между выходным крутящим моментом электродвигателя и потерями на электродвигателе. Обычно потери на электродвигателе становится больше при возрастании выходного крутящего момента. Таким образом, достигаемая максимальная топливная экономичность обеспечивается за счет распределения крутящего момента, выдаваемого электродвигателем MG2 и электродвигателем MG3, таким образом, что суммарные потери на электродвигателе MG2 и на электродвигателе MG3 минимизированы. Когда работа электродвигателя MG2 или электродвигателя MG3 ограничена из-за перегрева и т.п., коэффициент knenpi распределения движущей силы устанавливается для минимизации суммарных потерь на электродвигателе MG2 и на электродвигателе MG3 в пределах приводных ограничений. После того, как коэффициент knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, задан, ЭБУ 70 ГТС задает наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, в качестве коэффициента k распределения движущей силы для исполнения (этап S130) и завершает настоящую процедуру. Таким образом, при установке коэффициента k распределения движущей силы, коэффициент knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, устанавливается в качестве коэффициента k распределения движущей силы. Соответственно, эффективность использования энергии транспортного средства может быть повышена.
[0034] Напротив, когда на этапе S110 определено, что переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ, ЭБУ 70 ГТС задает коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения в качестве коэффициента k распределения движущей силы для осуществления (этап S140), и заканчивает настоящую программу. Таким образом, когда переключатель 92 режима работы работает на переключение режима РЗ в режим ПЗ, коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения устанавливается в качестве коэффициента k распределения движущей силы, чтобы предотвратить перегрев электродвигателя MG3 или способствовать охлаждению электродвигателя MG3. Как правило, электродвигатель MG2, который выдает движущую силу на пару передних колес 38а, 38b вместе с двигателем 22, во время движения постоянно приводится в действие. Соответственно, электродвигатель MG2 имеет относительно большой размер и большую теплоемкость, и также включает в себя охлаждающее устройство с достаточной производительностью для предотвращения перегрева. В противоположность этому, электродвигатель MG3, который приводится в действие лишь часть рабочего времени, часто имеет относительно небольшой размер и небольшую теплоемкость, и также включает в себя охлаждающее устройство небольшой производительности для предотвращения перегрева. Соответственно, если электродвигатель MG3 работает постоянно, электродвигатель MG3 имеет тенденцию перегреваться, что приводит к приводным ограничениям, накладываемым на электродвигатель MG3. Тем не менее, согласно этому примеру осуществления изобретения, когда переключатель 92 режима работы работает, чтобы переключить режим РЗ в режим ПЗ, электродвигатель MG3 приводится в действие, только если определено, что необходим привод на четыре колеса. Соответственно, можно предотвратить не только перегрев электродвигателя MG3, но и осуществить охлаждение электродвигателя MG3. Поэтому, когда после этого переключатель 92 режима работы работает, чтобы переключить режим РЗ в режим ПЗ, характеристики электродвигателя MG3 могут быть продемонстрированы в достаточной степени.
[0035] Фиг. 4 представляет собой временную диаграмму, иллюстрирующую пример временного изменения состояния заряда СЗ, режима движения, а также коэффициентов k распределения движущей силы. Транспортное средство движется в режиме РЗ до момента Т1 времени. В течение этого промежутка времени, с прохождением времени состояние заряда СЗ уменьшается, и ЭБУ 70 ГТС устанавливает наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования энергии, в качестве коэффициента k распределения движущей силы. В момент Т1 времени переключатель 92 режима выполняет переключение режима движения из режима РЗ в режим ПЗ. В результате состояние заряда СЗ поддерживается неизменным независимо от прохождения времени, и ЭБУ 70 ГТС устанавливает коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения в качестве коэффициента k распределения движущей силы. То есть когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ, электродвигатель ЭГЗ приводится в действие, только если определяется, что привод на четыре колеса необходим. В режиме ПЗ коэффициент движущей силы электродвигателя MG3 делается меньше, чем коэффициент движущей силы в режиме РЗ. Другими словами, во время движения в режиме РЗ, коэффициент движущей силы электродвигателя MG3 делается больше, чем коэффициент движущей силы в режиме ПЗ, переключенном из режима РЗ действием переключателя 92 режима работы. Соответственно, когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ, частота использования электродвигателя MG3 уменьшается, что делает возможным охлаждение электродвигателя MG3. Далее, когда переключатель 92 режима работы снова действует для переключения режима движения из режима ПЗ в режим РЗ, состояние заряда СЗ уменьшается с течением времени, и ЭБУ 70 ГТС устанавливает наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к характеристикам и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, в качестве коэффициента k распределения движущей силы. Так как электродвигатель MG3 в это время достаточно охлажден, приводные ограничения из-за перегрева не накладываются, так что характеристики электродвигателя MG3 могут быть продемонстрированы в достаточной степени. В результате эффективность использования энергии транспортного средства может быть повышена. В момент Т3 времени, когда состояние заряда СЗ достигает порогового значения Shv2, режим движения переключается из режима РЗ в режим ПЗ из-за уменьшения состояния заряда СЗ. Соответственно, состояние заряда СЗ сохраняется неизменным, независимо от прохождения времени. ЭБУ 70 ГТС устанавливает наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, в качестве коэффициента k распределения движущей силы.
[0036] В гибридном транспортном средстве 20 согласно этому примеру осуществления изобретения, описанному выше, когда транспортное средство движется в режиме РЗ, наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, устанавливается в качестве коэффициента k распределения движущей силы. Соответственно, эффективность использования энергии транспортного средства может быть повышена. Когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ в то время, как гибридное транспортное средство 20 согласно этому примеру осуществления изобретения движется в режиме РЗ, коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения устанавливается в качестве коэффициента k распределения движущей силы. То есть когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ, электродвигатель MG3 приводится в действие, только если определяется, что привод на четыре колеса необходим. В режиме ПЗ, коэффициент движущей силы электродвигателя MG3 делается меньше, чем коэффициент движущей силы в режиме РЗ. В результате, становится возможным предотвратить перегревание электродвигателя MG3 и охладить электродвигатель MG2. Когда переключатель 92 режима работы срабатывает снова в гибридном транспортном средстве 20 согласно этому примеру осуществления изобретения для переключения режима ПЗ в режим РЗ, наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, устанавливается в качестве коэффициента k распределения движущей силы. Так как электродвигатель MG3 в это время охлажден, приводные ограничения из-за перегрева не накладываются, так что электродвигатель MG3 может в достаточной степени продемонстрировать рабочие характеристики. В результате эффективность использования энергии транспортного средства может быть повышена. Как следствие, становится возможным предотвратить перегрев электродвигателя MG3, и при этом достигнуть повышенной эффективности использования энергии транспортного средства.
[0037] В гибридном транспортном средстве 20 согласно этому примеру осуществления изобретения, когда режим движения переключается из режима РЗ в режим ПЗ из-за уменьшения состояния заряда СЗ, наибольший коэффициент из коэффициента kdrv распределения движущей силы в соответствии с требованиями к параметрам движения и коэффициента knenpi распределения движущей силы, который оптимизирует эффективность использования топлива, устанавливается в качестве коэффициента k распределения движущей силы. Тем не менее, ЭБУ ГТС может устанавливать коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения в качестве коэффициента k распределения движущей силы, как и в случае, когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ.
[0038] В гибридном транспортном средстве 20 согласно этому примеру осуществления изобретения, когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ во время движения в режиме РЗ, коэффициент kdrv распределения движущей силы в соответствии с требованиями к параметрам движения устанавливается в качестве коэффициента k распределения движущей силы. Тем не менее, коэффициент k распределения движущей силы может быть установлен так, что коэффициент движущей силы электродвигателя MG3 во время движения в режиме РЗ больше, чем коэффициент, используемый, когда переключатель 92 режима работы действует для переключения режима РЗ в режим ПЗ во время движения в режиме РЗ. Соответственно, ЭБУ ГТС может устанавливать коэффициент распределения движущей силы в соответствии с другими требованиями, в дополнение к коэффициенту kdrv распределения движущей силы в соответствии с требованиями к параметрам движения.
[0039] Гибридное транспортное средство 20 согласно этому примеру осуществления изобретения включает в себя зарядное устройство 60 аккумулятора, которое заряжает аккумулятор 50 с помощью штекера 61 источника питания, соединенного с внешним источником 69 питания. Тем не менее, гибридное транспортное средство 20 может включать в себя зарядное устройство аккумулятора, которое заряжает аккумулятор 50 путем получения электроэнергии от внешнего источника 69 питания бесконтактным способом.
[0040] Гибридное транспортное средство 20 согласно этому примеру осуществления изобретения выполнено таким образом, что двигатель 22, электродвигатель MG1 и электродвигатель MG2 соединены с ведущим валом 36F, соединенным с передними колесами 38а, 38b, а электродвигатель MG3 соединен с ведущим валом 36R соединенным с задними колесами 38с, 38d. Тем не менее, гибридное транспортное средство 20 может быть выполнено таким образом, что двигатель 22, электродвигатель MG1 и электродвигатель MG2 соединены с ведущим валом, соединенным с задними колесами, а электродвигатель MG3 соединен с ведущим валом, соединенным с передними колесами.
[0041] Гибридное транспортное средство 20 согласно примеру осуществления изобретения выполнено как гибридное транспортное средство, в котором двигатель 22, электродвигатель MG1 и ведущий вал 36F, соединенные с парой передних колес 38а, 38b, соединены с планетарной передачей 30, ведущий вал 36F соединен с электродвигателем MG2, а ведущий вал 36R, соединенный с парой задних колес 38c, 38d, соединен с электродвигателем MG3. Тем не менее, подобно модификации гибридного транспортного средства 220, проиллюстрированного на фиг. 5, гибридное транспортное средство настоящего изобретения может быть сконфигурировано таким образом, что ведущий вал 36F, соединенный с парой передних колес 38а, 38b, соединен с электродвигателем ЭГF через трансмиссию 230, вращающийся вал электродвигателя MGF соединен с двигателем 22 через сцепление 229, а ведущий вал 36R, соединенный с парой задних колес 38c, 38d, соединен с электродвигателем MGR. Гибридное транспортное средство может иметь любую конфигурацию с тем условием, что гибридное транспортное средство включает в себя двигатель и первый электродвигатель, которые выдают движущую силу на одну пару колес из пары передних колес и пары задних колес, и второй электродвигатель, который может выдавать движущую силу на другую пару колес из пары передних колес и пары задних колес.
[0042] Далее приведено описание соответствия между основными элементами этого примера осуществления изобретения и основными элементами формулы настоящего изобретения. Согласно этому примеру осуществления изобретения, двигатель 22 соответствует двигателю, электродвигатель MG2 соответствует первому электродвигателю, электродвигатель MG3 соответствует второму электродвигателю, аккумулятор 50 соответствует аккумулятору, ЭБУ 70 ГТС, ЭБУ 24 двигателя, и ЭБУ 40 электродвигателей соответствуют электронным блокам управления, и переключатель 92 режима работы соответствует переключателю режима работы.
[0043] Поскольку соответствие между основными элементами этого примера осуществления изобретения и основными элементами формулы настоящего изобретения представляет собой пример особого описания режима выполнения настоящего изобретения, описанного в «Сущности изобретения», соответствие не предназначено для ограничения элементов изобретения. То есть пример осуществления изобретения представляет собой просто конкретный пример изобретения.
[0044] Хотя способ осуществления настоящего изобретения был описан с помощью примера осуществления изобретения, настоящее изобретение не ограничивается каким-либо образом раскрытым примером осуществления изобретения. Естественно, следует понимать, что настоящее изобретение может быть осуществлено различными образами в пределах объема настоящего изобретения.
[0045] Настоящее изобретение применимо в таких областях, как производство гибридного транспортного средства.
Изобретение относится к гибридным транспортным средствам. Устройство управления трансмиссией гибридного транспортного средства содержит электронный блок управления, сконфигурированный для управления двигателем, первым и вторым электродвигателем так, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения. Первый коэффициент движущей силы становится больше, чем второй коэффициент, когда транспортное средство движется в режиме расходования заряда. Первый коэффициент представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда транспортное средство движется в режиме расходования заряда. Второй коэффициент представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы. Предотвращается перегревание второго электродвигателя. 3 н. и 8 з.п. ф-лы, 5 ил.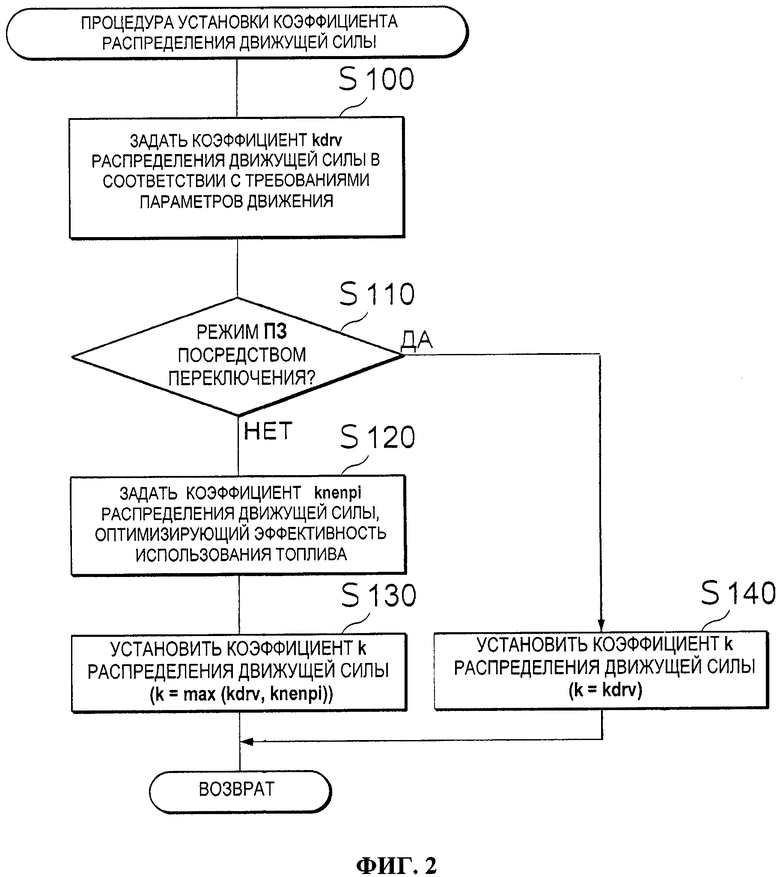
1. Устройство управления трансмиссией гибридного транспортного средства, при этом гибридное транспортное средство включает в себя
пару передних колес,
пару задних колес,
двигатель и первый электродвигатель, сконфигурированные для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес,
второй электродвигатель, сконфигурированный для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес,
аккумулятор, сконфигурированный для подачи электроэнергии на первый электродвигатель и второй электродвигатель, и
переключатель режима работы, сконфигурированный для переключения между режимом расходования заряда и режимом поддержания заряда, при этом устройство управления трансмиссией содержит
электронный блок управления, сконфигурированный для:
управления двигателем, первым электродвигателем и вторым электродвигателем таким образом, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения гибридного транспортного средства; и
осуществления управления таким образом, что первый коэффициент движущей силы становится больше, чем второй коэффициент движущей силы, когда гибридное транспортное средство движется в режиме расходования заряда, при этом первый коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме расходования заряда, второй коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
2. Устройство управления по п. 1, в котором
электронный блок управления сконфигурирован для управления первым электродвигателем и вторым электродвигателем так, чтобы минимизировать потери на первом электродвигателе и втором электродвигателе, когда гибридное транспортное средство движется в режиме расходования заряда.
3. Устройство управления по п. 1, в котором
электронный блок управления сконфигурирован для:
управления первым электродвигателем и вторым электродвигателем с первым коэффициентом распределения движущей силы, когда гибридное транспортное средство движется в режиме поддержания заряда, при этом первый коэффициент распределения движущей силы представляет собой коэффициент распределения движущей силы в соответствии с требованиями к параметрам движения; и
управления первым электродвигателем и вторым электродвигателем с коэффициентом распределения движущей силы, выбранным из первого коэффициента распределения движущей силы и второго коэффициента распределения движущей силы, при этом второй коэффициент распределения движущей силы представляет собой коэффициент распределения движущей силы, при котором потери на первом электродвигателе и втором электродвигателе минимизированы, когда гибридное транспортное средство движется в режиме расходования заряда.
4. Устройство управления по любому из пп. 1-3, в котором
электронный блок управления сконфигурирован для осуществления управления таким образом, что второй коэффициент движущей силы становится меньше, чем третий коэффициент движущей силы, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы, при этом третий коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда из-за уменьшения состояния заряда аккумулятора.
5. Устройство управления по любому из пп. 1 - 3, в котором
электронный блок управления сконфигурирован для осуществления управления по выдаче движущей силы из второго электродвигателя только тогда, когда электронный блок управления определяет, что требуется движение с четырехколесным приводом при движении гибридного транспортного средства в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
6. Гибридное транспортное средство, содержащее:
пару передних колес;
пару задних колес;
двигатель и первый электродвигатель, сконфигурированные для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес;
второй электродвигатель, сконфигурированный для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес;
аккумулятор, сконфигурированный для подачи электроэнергии на первый электродвигатель и второй электродвигатель; и
переключатель режима работы, сконфигурированный для переключения между режимом расходования заряда и режимом поддержания заряда; и
устройство управления трансмиссией по любому из пп. 1-5, в котором электронный блок управления сконфигурирован для управления двигателем, первым электродвигателем и вторым электродвигателем.
7. Способ управления трансмиссией гибридного транспортного средства, при этом гибридное транспортное средство включает в себя
пару передних колес,
пару задних колес,
двигатель и первый электродвигатель, сконфигурированный для выдачи движущей силы на одну пару колес из пары передних колес и пары задних колес,
второй электродвигатель, сконфигурированный для выдачи движущей силы на другую пару колес из пары передних колес и пары задних колес,
аккумулятор, сконфигурированный для подачи электроэнергии на первый электродвигатель и второй электродвигатель, и
переключатель режима работы, сконфигурированный для переключения между режимом расходования заряда и режимом поддержания заряда во время выполнения гибридного движения, и
электронный блок управления,
при этом способ управления трансмиссией включает в себя:
управление, с помощью электронного блока управления, двигателем, первым электродвигателем и вторым электродвигателем таким образом, что гибридное транспортное средство движется с требуемой движущей силой, необходимой для движения гибридного транспортного средства; и
осуществление управления с помощью электронного блока управления таким образом, что первый коэффициент движущей силы становится больше, чем второй коэффициент движущей силы, когда гибридное транспортное средство движется в режиме расходования заряда, при этом первый коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме расходования заряда, второй коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
8. Способ управления по п. 7, дополнительно включающий
управление с помощью электронного блока управления первым электродвигателем и вторым электродвигателем с тем, чтобы минимизировать потери на первом электродвигателе и втором электродвигателе, когда гибридное транспортное средство движется в режиме расходования заряда.
9. Способ управления по п. 7, дополнительно включающий
управление с помощью электронного блока управления первым электродвигателем и вторым электродвигателем с первым коэффициентом распределения движущей силы в соответствии с требованиями к параметрам движения, когда гибридное транспортное средство движется в режиме поддержания заряда, причем первая движущая сила представляет собой коэффициент распределения движущей силы в соответствии с требованиями к параметрам движения; и
управление с помощью электронного блока управления первым электродвигателем и вторым электродвигателем с коэффициентом распределения движущей силы, выбранным из первого коэффициента распределения движущей силы и второго коэффициента распределения движущей силы, при этом второй коэффициент распределения движущей силы представляет собой коэффициент распределения движущей силы, при котором потери на первом электродвигателе и втором электродвигателе минимизированы, когда гибридное транспортное средство движется в режиме расходования заряда.
10. Способ управления по любому из пп. 7-9, дополнительно включающий
осуществление управления с помощью электронного блока управления таким образом, что второй коэффициент движущей силы становится меньше, чем третий коэффициент движущей силы, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы, при этом третий коэффициент движущей силы представляет собой долю движущей силы, выдаваемой из второго электродвигателя, в требуемой движущей силе, когда гибридное транспортное средство движется в режиме поддержания заряда, переключенном из режима расходования заряда из-за уменьшения состояния зарядки аккумулятора.
11. Способ управления по любому из пп. 7-9, дополнительно включающий
осуществление, с помощью электронного блока управления, управления по выдаче движущей силы из второго электродвигателя только тогда, когда электронный блок управления определяет, что требуется движение с четырехколесным приводом при движении гибридного транспортного средства в режиме поддержания заряда, переключенном из режима расходования заряда переключателем режима работы.
| Способ подготовки и подачи материала металлургической шихты | 1990 |
|
SU1759915A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2006 |
|
RU2381930C2 |
| US 6549840 B1, 15.04.2003 | |||
| US 2015038286 A1, 05.02.2015. | |||

