1. Область техники
[0001] Изобретение относится к гибридному транспортному средству, в частности гибридному транспортному средству, содержащему накопитель электроэнергии, хранящий электроэнергию для движения транспортного средства. В частности, изобретение относится к гибридному транспортному средству, способному устанавливать режим управления уровнем заряда в накопителе электрической энергии на режим использования заряда (CD) или режим подзарядки (CS).
2. Раскрытие предшествующего уровня техники
[0002] В японской опубликованной патентной заявке № 2016-215838 раскрыто гибридное транспортное средство, содержащее двигатель, первый мотор-генератор, выполненный с возможностью генерации электроэнергии с использованием динамической мощности двигателя, второй мотор-генератор, соединенный с ведущим колесом, и аккумулятор, хранящий электроэнергию для движения транспортного средства. В гибридном транспортном средстве режим управления SOC переключают в зависимости от уровня заряда (SOC) аккумулятора. В частности, пока SOC не уменьшится до заданного нижнего предельного значения (соответствующего израсходованию SOC), режим управления SOC будет установлен в режим использования заряда (далее называемый режимом CD) в целях повышения эффективности расхода топлива. С другой стороны, после снижения SOC аккумулятора до вышеуказанного нижнего предельного значения (после израсходования SOC) режим управления SOC будет установлен в режим подзарядки (далее называемый режимом CS) с целью защиты аккумулятора.
[0003] Режим CD представляет собой режим управления, в котором гибридное транспортное средство расходует при движении SOC аккумулятора, то есть энергию разряда аккумулятора, по возможности не включая двигатель. Режим CS представляет собой режим управления, в котором гибридное транспортное средство по возможности поддерживает SOC аккумулятора, ограничивая разряд аккумулятора или выполняя подзарядку аккумулятора, благодаря чему работа двигателя упрощается по сравнению с режимом CD.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В режиме CS, раскрытом в патентной заявке JP 2016-215838 A, соотношение заряда и разряда аккумулятора регулируют таким образом, чтобы обеспечить максимальную стабильность SOC; это сужает диапазон колебаний SOC. Таким образом, в уровне техники в режиме CS привод двигателя, как правило, ограничен требованиями SOC.
[0005] В то же время, например, если известен пункт назначения транспортного средства и можно спрогнозировать транспортную нагрузку на запланированном маршруте до пункта назначения, транспортное средство может осуществлять управление (далее называемое «первое управление переключением»), автоматически переключаясь между режимами CD и CS в зависимости от прогнозируемой нагрузки на запланированном маршруте таким образом, чтобы SOC аккумулятора оказался израсходованным в момент прибытия в пункт назначения.
[0006] Тем не менее при установленном первом управление переключением в режиме CS, в котором управление SOC осуществляют с максимальным приближением к режиму CS, присущему в уровне техники, при этом может оказаться невозможным выполнение оптимального зарядно-разрядного цикла с эффективным расходом топлива, если управление SOC будет отклоняться от эталонного, то есть эффективность использования топлива будет снижена.
[0007] В первом аспекте изобретение относится к гибридному транспортному средству, способному ограничивать снижение эффективности использования топлива в режиме CS, установленном первым управлением переключением.
[0008] Гибридное транспортное средство согласно первому аспекту изобретения содержит: двигатель внутреннего сгорания; мотор-генератор, соединенный, по меньшей мере, с одним двигателем внутреннего сгорания и ведущим колесом; накопитель электрической энергии, электрически соединенный с мотор-генератором; и управляющее устройство, выполненное с возможностью выставления режима управления уровнем заряда накопителя электрической энергии на режим использования заряда или режим подзарядки. Управляющее устройство выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда накопителя электрической энергии в режиме подзарядки, когда управляющее устройство осуществляет первое управление переключением, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением, причем под первым управлением переключением понимают управление, при котором управляющее устройство автоматически переключается между режимами использования заряда и подзарядки, по меньшей мере, частично основываясь на прогнозируемой нагрузке на запланированном маршруте движения гибридного транспортного средства.
[0009] В конфигурации, в которой управляющее устройство осуществляет первое управление переключением, допустимый диапазон колебаний уровня заряда в режиме CS расширяется по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением. Таким образом, в режиме CS, установленном первым управлением переключением, состояние привода двигателя внутреннего сгорания легко определить по тепловому КПД двигателя внутреннего сгорания. Это позволяет ограничить снижение эффективности использования топлива в режиме CS, установленном первым управлением переключением.
[0010] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда в режиме подзарядки, когда управляющее устройство осуществляет первое управление переключением, а уровень заряда превышает нижнее предельное значение заряда, позволяющее двигаться в режиме использования заряда, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
[0011] В этом варианте исполнения, в котором управляющее устройство осуществляет первое управление переключением, а уровень заряда в накопителе электрической энергии превышает нижнее предельное значение (то есть при низкой потребности в защите накопителя электрической энергии), допустимый диапазон колебаний уровня заряда в режиме CS расширяется. Таким образом, в режиме CS, установленном первым управлением переключением, можно предотвратить нежелательное снижение эффективности использования топлива даже при низкой потребности в защите аккумулятора.
[0012] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью предотвращения отклонения уровня заряда от эталонного значения с помощью защитного процесса, заключающегося в ограничении требуемой зарядно-разрядной мощности накопителя электрической энергии диапазоном, определяемым верхним предельным защитным значением и нижним предельным защитным значением; кроме того, управляющее устройство может быть выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда в режиме подзарядки путем отключения или смягчения ограничения требуемой зарядно-разрядной мощности в рамках защитного процесса.
[0013] В этом варианте исполнения можно расширить допустимый диапазон колебаний уровня заряда в режиме CS путем простого отключения или смягчения ограничения требуемой зарядно-разрядной мощности в рамках защитного процесса.
[0014] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью остановки двигателя внутреннего сгорания при снижении требуемой мощности до уровня ниже порога остановки при работающем двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона увеличения уровня заряда в режиме подзарядки путем уменьшения порога остановки, когда управляющее устройство осуществляет первое управление переключением, а скорость транспортного средства находится в диапазоне больших скоростей, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
[0015] В этом варианте исполнения, когда скорость транспортного средства находится в диапазоне больших скоростей в режиме CS, установленном первым управлением переключением, допустимый диапазон увеличения уровня заряда расширяют путем уменьшения порога остановки. Таким образом, в диапазоне больших скоростей, характеризующемся высоким тепловым КПД двигателя, двигатель трудно остановить, а режим работы двигателя легко поддерживать. Это позволяет облегчить работу двигателя в режиме высокого теплового КПД двигателя и повысить эффективность использования топлива.
[0016] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью запуска двигателя внутреннего сгорания при превышении требуемой мощностью двигателя внутреннего сгорания порога запуска при остановленном двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона снижения уровня заряда в режиме подзарядки путем увеличения порога запуска, когда управляющее устройство осуществляет первое управление переключением, а скорость транспортного средства находится в диапазоне малых скоростей, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
[0017] В этом варианте исполнения, когда скорость транспортного средства находится в диапазоне малых скоростей в режиме CS, установленном первым управлением переключением, допустимый диапазон уменьшения уровня заряда расширяют путем увеличения порога запуска. Таким образом, в диапазоне малых скоростей, характеризующемся низким тепловым КПД двигателя, двигатель трудно запустить, а состояние остановки двигателя легко поддерживать. Это позволяет затруднить работу двигателя в режиме низкого теплового КПД двигателя и, соответственно, ограничить снижение эффективности использования топлива.
[0018] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью остановки двигателя внутреннего сгорания при снижении требуемой мощности до уровня ниже порога остановки при работающем двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона увеличения уровня заряда в режиме подзарядки путем уменьшения порога остановки, когда управляющее устройство осуществляет первое управление переключением, а двигатель внутреннего сгорания работает, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
[0019] В этом варианте исполнения, при работающем двигателе внутреннего сгорания в режиме CS, установленном первым управлением переключением, допустимый диапазон увеличения уровня заряда расширяют путем уменьшения порога остановки. Таким образом, остановка двигателя затруднена и, соответственно, количество запусков двигателя уменьшается. Это позволяет улучшить ходовые характеристики.
[0020] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью уменьшения допустимого диапазона увеличения уровня заряда, если оставшееся расстояние до пункта назначения окажется меньше порогового расстояния при расширении диапазона колебаний уровня заряда в накопителе электрической энергии.
[0021] Если диапазон колебаний (увеличения) уровня заряда будет расширен в режиме CS, установленном первым управлением переключением, независимо от ближайшего пункта назначения, существует вероятность превышения ожидаемого значения остаточным уровнем заряда в момент прибытия в пункт назначения.
[0022] Следовательно, в вышеупомянутом варианте исполнения допустимый диапазон увеличения уровня заряда будет уменьшен, если оставшееся расстояние до пункта назначения окажется меньше порогового расстояния при расширении диапазона колебаний уровня заряда. Таким образом, можно не допустить превышения ожидаемого уровня заряда на момент прибытия в пункт назначения.
[0023] Согласно вышеупомянутому аспекту, управляющее устройство может быть выполнено с возможностью уменьшения допустимого диапазона уменьшения уровня заряда, если уровень заряда окажется ниже порогового уровня при расширении диапазона колебаний уровня заряда в накопителе электрической энергии.
[0024] Если диапазон колебаний (уменьшения) уровня заряда будет расширен в режиме CS, установленном первым управлением переключением, даже несмотря на приближение уровня заряда к нижнему пределу, существует вероятность опускания уровня заряда до нижнего предела до прибытия в пункт назначения и завершения первого управления переключением раньше ожидаемого времени.
[0025] Следовательно, в вышеупомянутом варианте исполнения допустимый диапазон уменьшения уровня заряда будет уменьшен, если уровень заряда окажется ниже порогового уровня при расширении диапазона колебаний уровня заряда. Таким образом, можно предотвратить снижение уровня заряда до нижнего предела до прибытия в пункт назначения и не допустить завершения первого управления переключением раньше ожидаемого времени.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0026] Отличительные признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
ФИГ. 1 – полная компоновочная схема транспортного средства;
ФИГ. 2 – блок-схема, детально показывающая конфигурацию ЭБУ гибридного транспортного средства, различных датчиков и навигационного устройства;
ФИГ. 3 – структурная схема (1), демонстрирующая пример процедуры обработки ЭБУ гибридного транспортного средства;
ФИГ. 4 – схема, показывающая пример изменения SOC накопителя электрической энергии и пример изменения режима управления при осуществлении второго управления переключением CD-CS;
ФИГ. 5 – схема, показывающая пример изменения SOC накопителя электрической энергии и пример изменения режима управления при осуществлении первого управления переключением CD-CS;
ФИГ. 6 – структурная схема (2), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства;
ФИГ. 7 – структурная схема (3), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства;
ФИГ. 8 – структурная схема (4), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства;
ФИГ. 9 – структурная схема (5), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства;
ФИГ. 10 – структурная схема (6), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства; и
ФИГ. 11 – структурная схема (7), демонстрирующая пример процедуры обработки в ЭБУ гибридного транспортного средства.
ДЕТАЛЬНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0027] Ниже по тексту будут раскрыты некоторые варианты осуществления со ссылкой на прилагаемые фигуры. На фигурах одинаковые ссылочные обозначения присваиваются одинаковым или эквивалентным деталям, и их раскрытие повторно не дается.
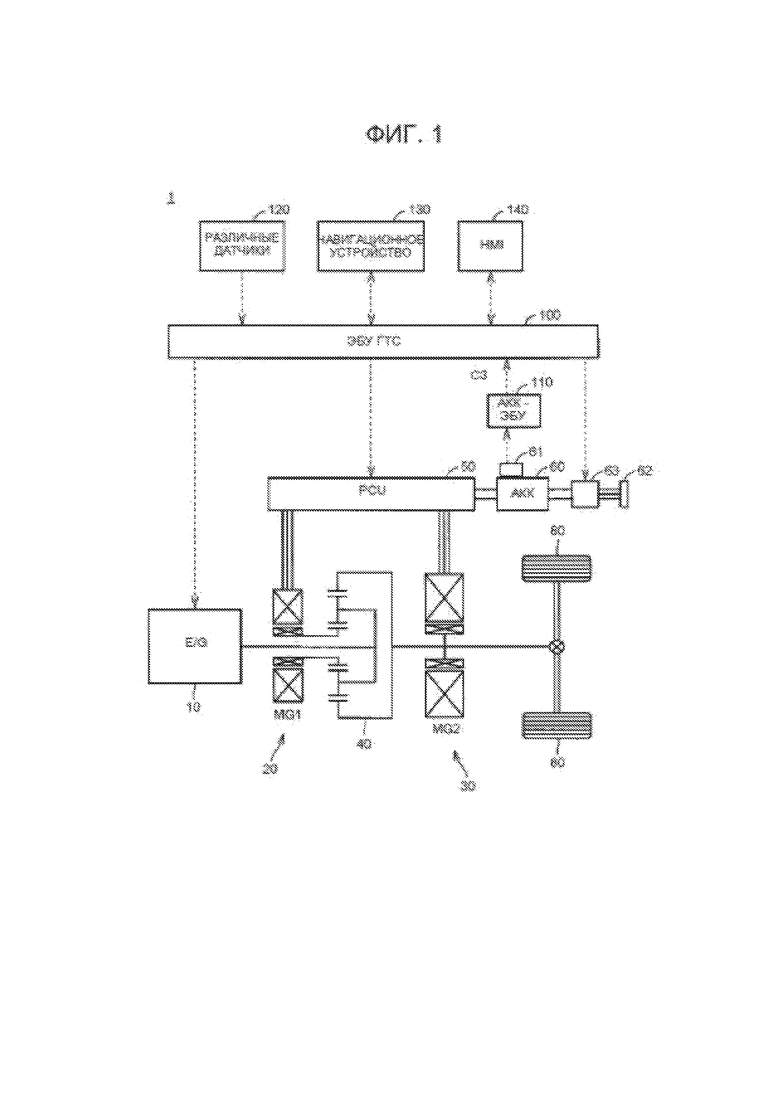
[0028] ФИГ. 1 – полная компоновочная схема транспортного средства 1 согласно варианту исполнения изобретения. Транспортное средство 1 представляет собой так называемое транспортное средство с гибридной силовой установкой. Транспортное средство 1 содержит двигатель 10, первый мотор-генератор (далее называемый «первый МГ») 20, второй мотор-генератор (далее, называемый «второй МГ») 30, разветвитель 40 мощности, блок 50 управления мощностью (PCU), накопитель 60 электрической энергии, впускное отверстие 62, зарядное устройство 63 и ведущие колеса 80.
[0029] Двигатель 10 представляет собой двигатель внутреннего сгорания, производящий динамическую мощность путем преобразования энергии сгорания воздушно-топливной смеси в кинетическую энергию подвижного элемента, например, поршня и ротора. Разветвитель 40 мощности содержит, например, планетарную передачу с тремя осями вращения для солнечной шестерни, водила и ведомой шестерни. Разветвитель 40 мощности делит динамическую выходную мощность двигателя 10 на динамическую мощность для привода первого МГ 20 и динамическую мощность для привода ведущих колес 80.
[0030] Первый МГ 20 и второй МГ 30 представляют собой мотор-генераторы переменного тока, например, трехфазные синхронные электродвигатели переменного тока с роторами с постоянными магнитами. Первый МГ 20 обычно используют в качестве генератора электрического тока, приводящегося от двигателя 10 через разветвитель 40 мощности. Электрическая мощность, генерируемая первым МГ 20, поступает на второй МГ 30 или в накопитель 60 электрической энергии через PCU 50.
[0031] Второй МГ 30 преимущественно работает в качестве электродвигателя и приводит ведущие колеса 80. Второй МГ 30 приводят, по меньшей мере, электрической мощностью из накопителя 60 электрической энергии или электрической мощностью, генерируемой первым МГ 20, и движущую силу второго МГ 30 передают на ведущие колеса 80. При этом, во время торможения транспортного средства 1 или уменьшения ускорения на спуске второй МГ 30 работает как электрический генератор для рекуперации электроэнергии. Электрическая мощность, генерируемая вторым МГ 30, возвращается в накопитель 60 электрической энергии через PCU 50.
[0032] Транспортное средство 1, изображенное на ФИГ. 1, представляет собой гибридное транспортное средство, содержащее двигатель 10 и два мотор-генератора (первый МГ 20 и второй МГ 30) в качестве приводов; при этом транспортные средства, к которым применимо изобретение, не ограничиваются транспортным средством 1, показанным на ФИГ. 1. Например, изобретение применимо, в том числе, к гибридному транспортному средству, содержащему двигатель и один мотор-генератор.
[0033] PCU 50 преобразует мощность постоянного тока, полученную из накопителя 60 электрической энергии, в мощность переменного тока для привода первого МГ 20 и второго МГ 30. Кроме того, PCU 50 преобразует мощность переменного тока, генерируемую первым МГ 20 и вторым МГ 30, в мощность постоянного тока для зарядки накопителя 60 электрической энергии. Например, PCU 50 рассчитан на включение двух инверторов, выполненных с возможностью соответствия первому МГ 20 и второму МГ 30, и преобразователей, повышающих напряжение постоянного тока, подаваемое на инверторы, до значения, равного или превышающего напряжение накопителя 60 электрической энергии.
[0034] Накопитель 60 электрической энергии представляет собой перезаряжаемый источник питания постоянного тока и выполнен, например, с возможностью подключения вторичного аккумулятора, например, литий-ионного или никель-водородного аккумулятора. Накопитель 60 электрической энергии заряжают путем приема электрической мощности, генерируемой, по меньшей мере, первым МГ 20 или вторым МГ 30. После этого накопитель 60 электрической энергии подает запасенную электрическую энергию на PCU 50. В качестве накопителя 60 электрической энергии можно использовать конденсатор с двойным электрическим слоем или подобное ему устройство.
[0035] На накопителе 60 электрической энергии предусмотрен блок 61 мониторинга. Блок 61 мониторинга содержит датчик напряжения, датчик тока и датчик температуры (не показанные на фигуре), определяющие, соответственно, напряжение, входной и выходной ток и температуру накопителя 60 электрической энергии. Блок 61 мониторинга передает показания датчиков (напряжение, входной и выходной ток и температура накопителя 60 электрической энергии) на ЭБУ 110 аккумулятора.
[0036] Впускное отверстие 62 выполнено с возможностью подключения к устройству подачи энергии (не показанному на фигуре) вне транспортного средства. Зарядное устройство 63 предусмотрено между впускным отверстием 62 и накопителем 60 электрической энергии. Зарядное устройство 63, управляемое управляющим сигналом от ЭБУ 100 гибридного транспортного средства, преобразует внешнюю электрическую энергию, поступающую из устройства подачи энергии вне транспортного средства, в электрическую энергию, позволяющую заряжать накопитель 60 электрической энергии, и подает преобразованную электрическую энергию в накопитель 60 электрической энергии. В дальнейшем зарядка накопителя 60 электрической энергии внешней электрической энергией будет называться «внешней зарядкой».
[0037] Кроме того, транспортное средство 1 содержит ЭБУ 100 (электронный блок управления) гибридного транспортного средства, ЭБУ 110 аккумулятора, различные датчики 120, навигационное устройство 130 и устройство 140 человеко-машинного интерфейса (HMI).
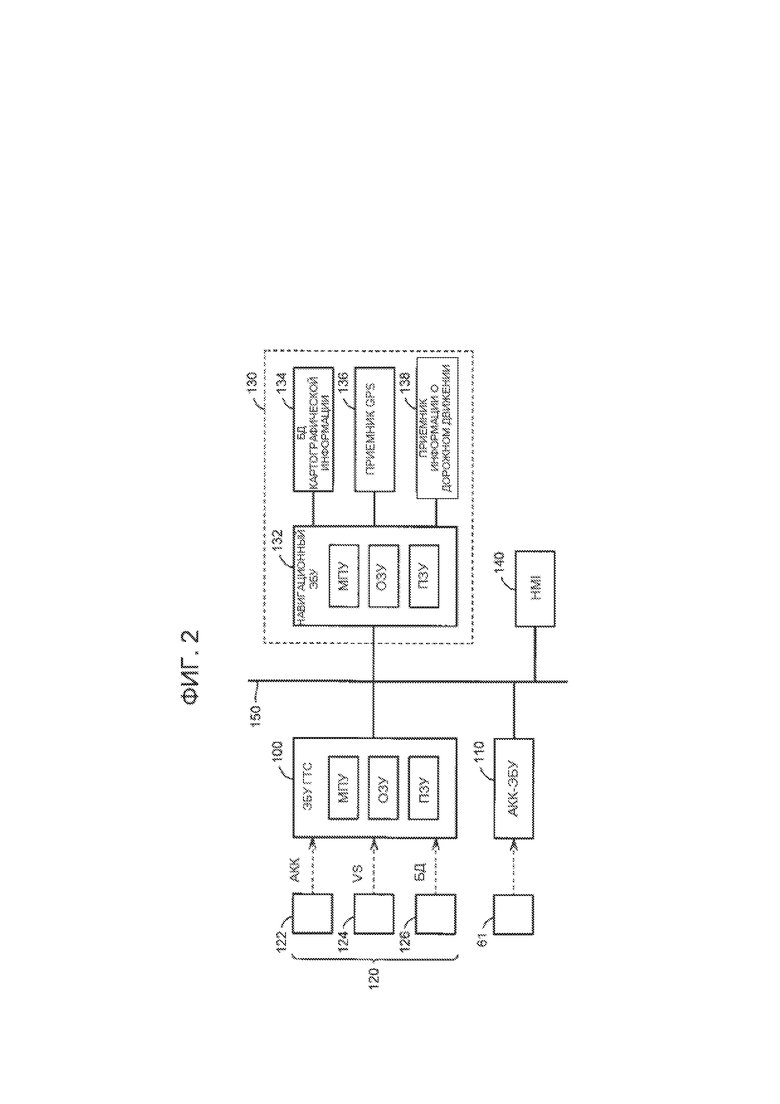
[0038] ФИГ. 2 – блок-схема, детально показывающая конфигурацию ЭБУ 100 гибридного транспортного средства, различных датчиков 120 и навигационного устройства 130, показанных на ФИГ. 1. ЭБУ 100 гибридного транспортного средства, ЭБУ 110 аккумулятора, навигационное устройство 130 и устройство 140 HMI выполнены с возможностью обмена данными по шине CAN 150.
[0039] Например, в число различных датчиков 120 входит датчик 122 педали акселератора, датчик 124 скорости и датчик 126 педали тормоза. Датчик 122 педали акселератора определяет степень нажатия пользователя на педаль акселератора (далее «степень нажатия на педаль акселератора») ACC. Датчик 124 скорости определяет скорость VS транспортного средства 1. Датчик 126 педали тормоза определяет степень BP нажатия пользователя на педаль тормоза. Соответствующие датчики передают свои показания на ЭБУ 100 гибридного транспортного средства.
[0040] ЭБУ 100 гибридного транспортного средства содержит центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), в котором хранятся программы обработки и т.п., оперативное запоминающее устройство (ОЗУ), в котором временно хранятся данные, порты ввода-вывода (не показанные на фигуре), через которые осуществляется ввод и вывод различных сигналов и т.п. ЭБУ 100 гибридного транспортного средства выполняет предопределенные процессы вычислений на основании информации, хранящейся в памяти (ПЗУ и ОЗУ), показаний различных датчиков 120 и информации от ЭБУ 110 аккумулятора. Далее ЭБУ 100 гибридного транспортного средства управляет устройствами, например, двигателем 10, PCU 50 и устройством HMI 140 на основании результатов вычислительных процессов.
[0041] ЭБУ 110 аккумулятора также содержит ЦП, ПЗУ, ОЗУ, порты ввода-вывода и т.п. (не показанные на фигуре). ЭБУ 110 аккумулятора рассчитывает SOC, показывающий уровень заряда накопителя 60 электрической энергии, на основании значений входного и выходного тока и/или напряжения накопителя 60 электрической энергии, найденных блоком 61 мониторинга. Например, SOC выражает уровень заряда накопителя 60 электрической энергии в текущее время в процентах от полной емкости. ЭБУ 110 аккумулятора передает рассчитанный SOC на ЭБУ 100 гибридного транспортного средства. ЭБУ 100 гибридного транспортного средства может рассчитывать SOC.
[0042] Кроме того, ЭБУ 110 аккумулятора передает значения температуры накопителя 60 электрической энергии, найденные блоком 61 мониторинга, на ЭБУ 100 гибридного транспортного средства.
[0043] Навигационное устройство 130 содержит ЭБУ 132 навигации, картографическую базу 134 данных (БД), приемник 136 глобальной системы позиционирования (GPS) и приемник 138 информации о движении транспорта.
[0044] Картографическая база 134 данных, выполненная в виде жесткого диска (HDD) или иного подобного устройства, хранит картографическую информацию. Картографическая информация содержит данные об «узлах», в частности, перекрестках и тупиках, «связях» между соединительными узлами и «объектах» (зданиях, парковках и т.п.) вдоль связей. Картографическая информация содержит информацию о положении каждого узла, информацию о расстоянии по каждой связи, информацию о категории дороги (например, городская дорога, скоростная автомагистраль и дорога общего пользования) по каждой связи, информацию об уклоне по каждой связи и т.п.
[0045] Приемник 136 GPS принимает текущее положение транспортного средства 1 на основании сигналов (электрических волн) от спутников GPS (не показанных на фигурах) и подает сигнал, указывающий текущее положение транспортного средства 1, на ЭБУ 132 навигации.
[0046] Приемник 138 информации о движении транспорта принимает информацию о дорожном движении (например, информацию VICS (R)), распространяемую по каналам широковещательной передачи данных FM или иным подобным сетям. Информация о дорожном движении содержит, по меньшей мере, информацию о пробках, а также может содержать информацию о регулировании дорожного движения, парковочных зонах и т.п. Информация о дорожном движении обновляется, например, каждые пять минут.
[0047] ЭБУ 132 навигации содержит ЦП, ПЗУ, ОЗУ, порты ввода-вывода (не показанные на фигуре) и т.п. и передает текущее положение транспортного средства 1 и картографическую информацию, информацию о пробках и другие данные окружающей среды на устройство 140 HMI и ЭБУ 100 гибридного транспортного средства на основании разнообразной информации и сигналов, принятых от картографической базы 134 данных, приемника 136 GPS и приемника 138 информации о дорожном движении.
[0048] Когда пользователь вводит пункт назначения транспортного средства 1 в устройство 140 HMI, ЭБУ 132 навигации выполняет поиск запланированного маршрута движения от текущего положения транспортного средства 1 до пункта назначения на основании картографической базы 134 данных. Запланированный маршрут движения конфигурируют путем объединения узлов и связей от текущего положения транспортного средства 1 до пункта назначения. ЭБУ 132 навигации передает результат поиска (объединение узлов и связей) от текущего положения транспортного средства 1 до пункта назначения на устройство 140 HMI.
[0049] Кроме того, в ответ на запрос от ЭБУ 100 гибридного транспортного средства ЭБУ 132 навигации передает картографическую информацию и информацию о дорожном движении (далее «информацию о запланированном маршруте») на планируемом маршруте движения от текущего положения транспортного средства 1 до пункта назначения на ЭБУ 100 гибридного транспортного средства. Информация о запланированном маршруте используется для «первого управления переключением CD-CS», которое будет описано позже.
[0050] Устройство 140 HMI представляет собой устройство, предоставляющее пользователю информацию, помогающую управлять транспортным средством 1. Устройство 140 HMI обычно представляет собой дисплей, находящийся в кабине транспортного средства 1 и содержащий динамик и иные подобные элементы. Устройство 140 HMI предоставляет пользователю разнообразную информацию путем вывода визуальной информации (графической и текстовой информации), аудиоинформации (речевой и звуковой информации) и т.п.
[0051] Устройство 140 HMI работает как дисплей навигационного устройства 130. То есть устройство 140 HMI принимает текущее положение транспортного средства 1 и картографическую информацию, информацию о пробках и другие данные об окружающей среде от навигационного устройства 130 по шине CAN 150 и отображает текущее положение транспортного средства 1 вместе с картографической информацией о карте и информацией о пробках и окружающей среде.
[0052] Кроме того, устройство 140 HMI служит сенсорной панелью, которой может управлять пользователем. Прикосновением к сенсорной панели пользователь может, например, изменять масштаб отображаемой карты или вводить пункт назначения транспортного средства 1. При введении пункта назначения в устройство 140 HMI информация о пункте назначения направляется на навигационное устройство 130 по шине CAN 150.
[0053] Как было сказано выше, ЭБУ 132 навигации передает «информацию о запланированном маршруте» на ЭБУ 100 гибридного транспортного средства в ответ на запрос от ЭБУ 100 гибридного транспортного средства.
[0054] ЭБУ 100 гибридного транспортного средства устанавливает режим управления SOC накопителя 60 электрической энергии (далее просто «режим управления SOC») на один из режимов CD и CS и управляет двигателем 10, первым МГ 20 и вторым МГ 30 в зависимости от установленного режима управления.
[0055] В режиме CD транспортное средство 1 потребляет SOC (уровень заряда) накопителя 60 электрической энергии, максимально используя для движения энергию разряда накопителя 60 электрической энергии при отключенном двигателе 10. В режиме CS транспортное средство 1 по возможности поддерживает SOC накопителя 60 электрической энергии, ограничивая разряд накопителя 60 электрической энергии или выполняя подзарядку накопителя 60 электрической энергии, благодаря чему работа двигателя 10 упрощается по сравнению с режимом CD.
[0056] Если пользователь выполняет операцию запроса режима CS (например, нажимая переключатель выбора режима CS, не показанный на фигуре), ЭБУ 100 гибридного транспортного средства устанавливает режим управления SOC на режим CS.
[0057] Если пользователь не выполняет операцию запроса режима CS, ЭБУ 100 гибридного транспортного средства автоматически выполняет переключение между режимами CD и CS. В этом случае ЭБУ 100 гибридного транспортного средства изменяет способ автоматического переключения между режимами CD и CS в зависимости от того, был ли установлен запланированный маршрут движения для транспортного средства 1.
[0058] В частности, если запланированный маршрут движения не был установлен, ЭБУ 100 гибридного транспортного средства выполняет «второе управление переключением CD-CS» (обычное управление переключением CD-CS) для переключения между режимами CD и CS в зависимости от SOC.
[0059] С другой стороны, если запланированный маршрут движения был установлен, ЭБУ 100 гибридного транспортного средства выполняет «первое управление переключением CD-CS» для переключения между режимами CD и CS с учетом прогнозируемой нагрузки на запланированном маршруте движения.
Управление движением
[0060] Перед подробным описанием переключателей CD-CS (второе управление переключением CD-CS и первое управление переключением CD-CS) будет рассмотрено управление движением транспортного средства 1, осуществляемое ЭБУ 100 гибридного транспортного средства.
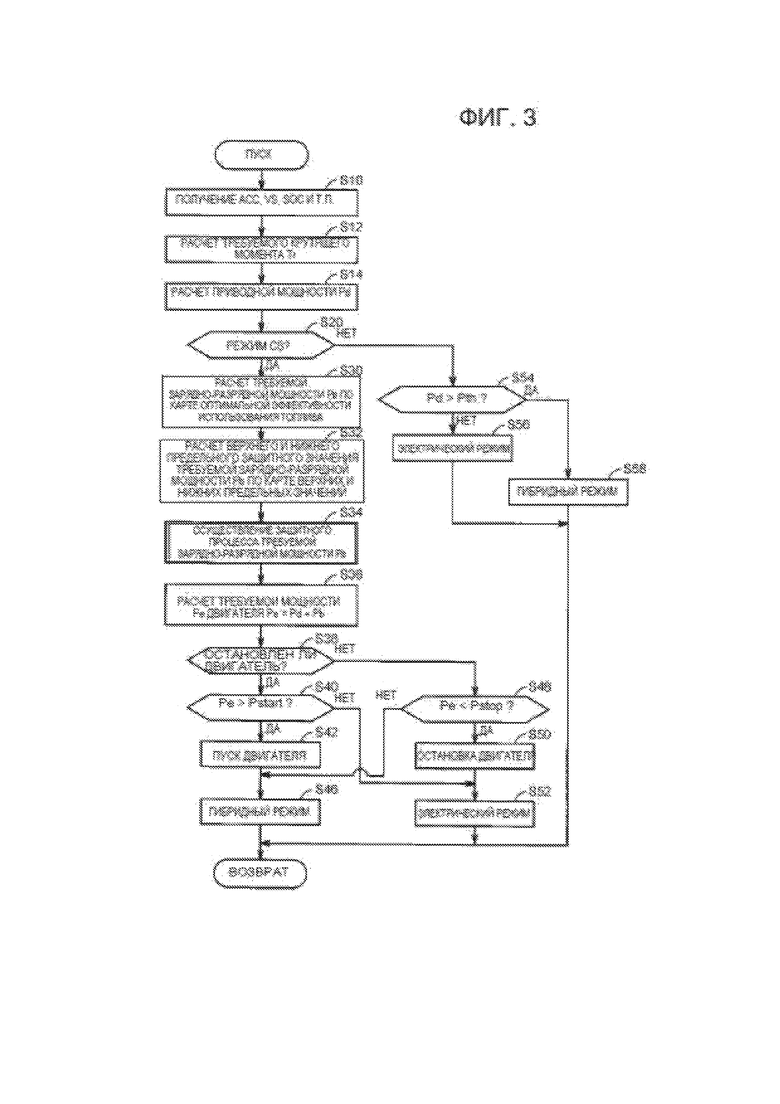
[0061] ФИГ. 3 – структурная схема, демонстрирующая пример процедуры обработки управления движением, выполняемой ЭБУ 100 гибридного транспортного средства. Например, последовательность процессов, показанных на структурной схеме, повторяется с заданной периодичностью, пока системный переключатель транспортного средства 1 находится во включенном состоянии.
[0062] ЭБУ 100 гибридного транспортного средства получает значения степени ACC нажатия на педаль акселератора и скорости VS транспортного средства с датчика 122 педали акселератора и датчика 124 скорости, соответственно, и значение SOC накопителя 60 электрической энергии от ЭБУ 110 аккумулятора (этап S10).
[0063] После этого ЭБУ 100 гибридного транспортного средства рассчитывает необходимый крутящий момент Tr для транспортного средства 1 на основании полученных значений степени ACC нажатия на педаль акселератора и скорости ВС транспортного средства (этап S12). Далее ЭБУ 100 гибридного транспортного средства рассчитывает приводную мощность Pd (требуемое значение) транспортного средства 1, умножая рассчитанный необходимый крутящий момент Tr на скорость VS транспортного средства (этап S14).
[0064] Затем ЭБУ 100 гибридного транспортного средства определяет, выставлен ли режим управления SOC в настоящее время на режим CS (этап S20).
[0065] Если ЭБУ 100 гибридного транспортного средства на этапе S20 определяет, что режим управления SOC в настоящее время выставлен на режим CS (ДА на этапе S20), то ЭБУ 100 гибридного транспортного средства рассчитывает требуемую зарядно-разрядную мощность Pb накопителя 60 электрической энергии на основании карты оптимальной эффективности использования топлива (этап S30). Положительная требуемая зарядно-разрядная мощность Pb показывает, что необходима подзарядка накопителя 60 электрической энергии, а отрицательная требуемая зарядно-разрядная мощность Pb показывает, что необходим разряд накопителя 60 электрической энергии.
[0066] Карта оптимальной эффективности использования топлива представляет собой карту, на которой требуемая зарядно-разрядная мощность Pb, оптимизирующая тепловой КПД работающего двигателя 10, определяется с использованием в качестве параметров приводной мощности Pd и скорости VS транспортного средства.
[0067] Затем ЭБУ 100 гибридного транспортного средства рассчитывает верхние и нижние предельные защитные значения (верхнее предельное защитное значение и нижнее предельное защитное значение) требуемой зарядно-разрядной мощности Pb по карте верхних и нижних предельных значений (этап S32). Карта верхних и нижних предельных значений – это карта, на которой верхние и нижние предельные защитные значения требуемой зарядно-разрядной мощности Pb заданы таким образом, чтобы исключить чрезмерное отклонение SOC от эталонного значения (целевого значения SOC), используя в качестве параметров SOC и скорость VS транспортного средства. Соответственно, скорость, при которой SOC соответствует эталонному (целевому) значению, когда SOC отклоняется от эталонного значения (далее просто «соответствие SOC и скорости») определяют в зависимости от верхних и нижних предельных защитных значений, рассчитанных по карте верхних и нижних предельных значений.
[0068] Затем ЭБУ 100 гибридного транспортного средства выполняет «защитный процесс», ограничивая требуемую зарядно-разрядную мощность Pb, рассчитанную по карте оптимальной эффективности использования топлива на этапе S30, с помощью верхних и нижних предельных защитных значений, рассчитанных по карте верхних и нижних предельных значений на этапе S32 (этап S34). Требуемая зарядно-разрядная мощность Pb после ограничения защитным процессом позволяет двигателю 10 работать таким образом, чтобы тепловой КПД двигателя 10 был высоким, а отклонение SOC от эталонного значения не было значительным.
[0069] Затем, как показано в следующем выражении (1), ЭБУ 100 гибридного транспортного средства вычисляет общее значение приводной мощности Pd, рассчитанной на этапе S14, и требуемую зарядно-разрядную мощность Pb, рассчитанную на этапах S30-S34, в качестве требуемой мощности двигателя Pe для двигателя 10 (этап S36).
[0070] Pe = Pd + Pb ... (1)
Затем ЭБУ 100 гибридного транспортного средства определяет, остановлен ли двигатель 10 (этап S38).
[0071] Если ЭБУ 100 гибридного транспортного средства на этапе S38 обнаружит, что двигатель 10 остановлен (ДА на этапе S38), то ЭБУ 100 гибридного транспортного средства определяет, превышает ли требуемая мощность двигателя Pe заданный порог Pstart запуска двигателя (этап S40).
[0072] Если ЭБУ 100 гибридного транспортного средства на этапе S40 обнаружит, что требуемая мощность двигателя Pe превышает порог Pstart запуска двигателя (ДА на этапе S40), ЭБУ 100 гибридного транспортного средства запускает двигатель 10 (этап S42). Затем ЭБУ 100 гибридного транспортного средства управляет двигателем 10 и PCU 50 таким образом, чтобы транспортное средство 1 использовало при движении мощность двигателя 10 и второго МГ 30. То есть транспортное средство 1 движется в гибридном режиме (гибридное транспортное средство), используя мощность двигателя 10 и второго МГ 30 (этап S46).
[0073] С другой стороны, если ЭБУ 100 гибридного транспортного средства на этапе S40 обнаружит, что требуемая мощность Pe двигателя не превышает порог Pstart запуска двигателя (НЕТ на этапе S40), ЭБУ 100 гибридного транспортного средства включает режим движения (электрический режим), в котором транспортное средство 1 движется, используя только мощность второго МГ 30, в то время как двигатель 10 находится в состоянии остановки (этап S52).
[0074] Если ЭБУ 100 гибридного транспортного средства на этапе S38 обнаружит, что двигатель 10 не остановлен (НЕТ на этапе S38), то есть двигатель 10 работает, ЭБУ 10 гибридного транспортного средства определяет, опускается ли требуемая мощность Pe двигателя ниже заданного порога Pstop остановки двигателя (этап S48).
[0075] Если ЭБУ 100 гибридного транспортного средства на этапе S48 обнаружит, что требуемая мощность Pe двигателя ниже порога Pstop остановки двигателя (ДА на этапе S48), ЭБУ 100 гибридного транспортного средства останавливает двигатель 10 (этап S50) и переключается в режим движения на электроэнергии (этап S52).
[0076] С другой стороны, если ЭБУ 100 гибридного транспортного средства на этапе S48 обнаружит, что требуемая мощность Pe двигателя не ниже порога Pstop остановки двигателя (НЕТ на этапе S48), ЭБУ 100 гибридного транспортного средства выполнит переключение в гибридный режим с работающим двигателем 10 (этап S46).
[0077] Если ЭБУ 100 гибридного транспортного средства на этапе S20 обнаружит, что режим управления SOC не выставлен на режим CS (НЕТ на этапе S20), то есть, режимом управления SOC является режим CD, ЭБУ 100 гибридного транспортного средства определяет, превышает ли приводная мощность Pd, рассчитанная на этапе S14, заданную мощность Pth (этап S54).
[0078] Если ЭБУ 100 гибридного транспортного средства на этапе S54 обнаружит, что приводная мощность Pd не превышает заданную мощность Pth (НЕТ на этапе S54), ЭБУ 100 гибридного транспортного средства останавливает двигатель 10 и переключается в электрический режим (этап S56).
[0079] С другой стороны, если ЭБУ 100 гибридного транспортного средства на этапе S54 обнаружит, что приводная мощность Pd превышает заданную мощность Pth (ДА на этапе S54), ЭБУ 100 гибридного транспортного средства задействует двигатель 10 и переключается в гибридный режим (этап S58).
Второе управление переключением CD-CS (обычное управление переключением CD-CS)
[0080] Второе управление переключением CD-CS будет описано ранее первого управления переключением CD-CS, описание которого приведено ниже. В дальнейшем второе управление переключением CD-CS будет называться «обычным управлением переключением CD-CS».
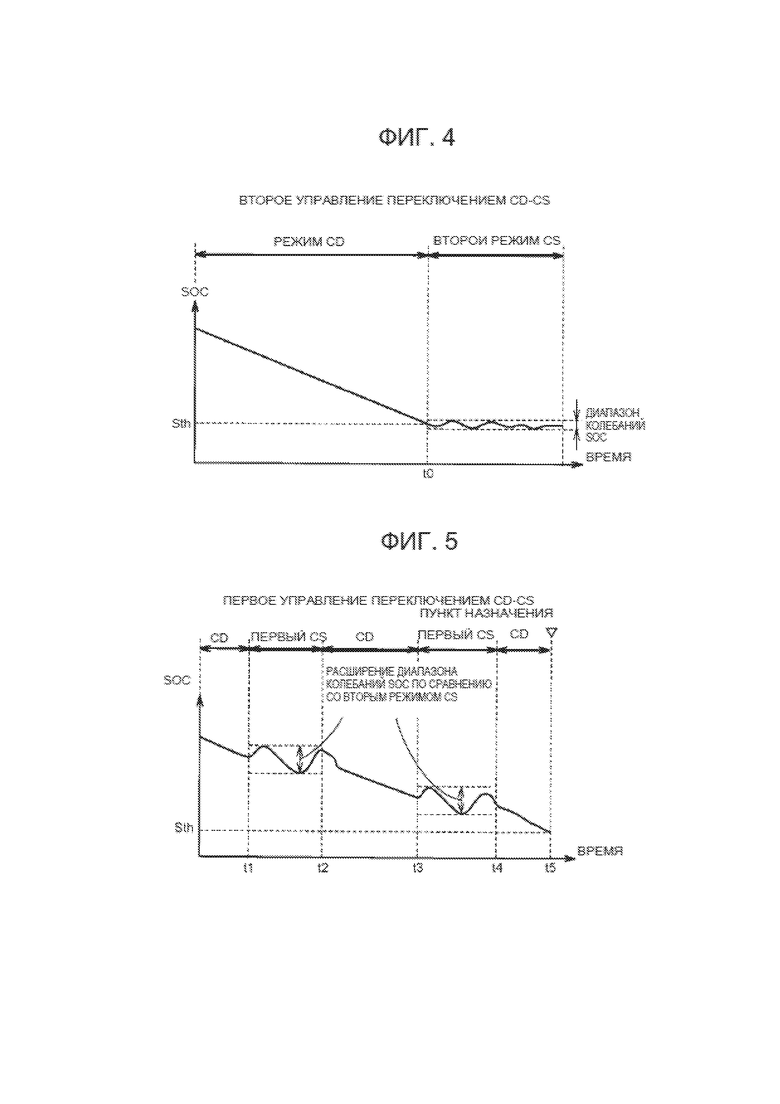
[0081] При втором управлении переключением CD-CS ЭБУ 100 гибридного транспортного средства устанавливает режим управления SOC на режим CD вплоть до уменьшения SOC до заданного значения Sth. Таким образом, расходованию внешней электрической энергии, запасенной в накопителе 60 электрической энергии, отдают приоритет перед топливом для двигателя 10, что повышает эффективность использования топлива. С другой стороны, после снижения SOC до заданного значения Sth ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в режим CS для защиты накопителя 60 электрической энергии. В данном случае «заданное значение Sth» представляет собой нижнее предельное значение SOC, позволяющее транспортному средству двигаться в режиме CD и предварительно определенное разработчиками или иными специалистами.
[0082] В дальнейшем режим CS, установленный вторым управлением переключением CD-CS, будет называться «вторым режимом CS».
[0083] ФИГ. 4 – схема, показывающая пример изменения SOC накопителя 60 электрической энергии и пример изменения режима управления при осуществлении второго управления переключением CD-CS. На ФИГ. 4 по оси абсцисс отложено время, а по оси ординат – SOC.
[0084] При втором управлении переключением CD-CS ЭБУ 100 гибридного транспортного средства устанавливает режим управления SOC на режим CD вплоть до момента t0, в который SOC уменьшается до заданного значения Sth. В режиме CD двигатель 10 не осуществляет поддержку SOC. Соответственно, хотя SOC иногда временно увеличивается за счет рекуперативной электрической мощности второго МГ 30 и т.п., в целом SOC постепенно уменьшается c начального значения в начале использования.
[0085] После этого ЭБУ 100 гибридного транспортного средства устанавливает режим управления SOC на второй режим CS (нормальный режим CS) после момента t0, в который SOC уменьшается до заданного значения Sth. Во втором режиме CS уровень SOC немедленно после включения режима CS (предварительно заданное значение Sth в примере, показанном на ФИГ. 4) принимают за эталонное значение, и зарядно-разрядный показатель накопителя 60 электрической энергии (например, объем вырабатываемой электроэнергии первого МГ 20 с использованием динамической мощности двигателя 10) регулируют таким образом, чтобы не допустить отклонения SOC от эталонного значения. В результате во втором режиме CS, хотя SOC и может колебаться в заданном диапазоне, включающем эталонное значение, диапазон колебаний SOC будет относительно невелик для защиты накопителя 60 электрической энергии.
Первое управление переключением CD-CS
[0086] Ниже будут описаны детали первого управления переключением CD-CS.
[0087] Второй режим CS устанавливают после израсходования SOC (после снижения SOC до заданного значения Sth), поэтому во втором режиме CS допустимый диапазон колебаний SOC относительно невелик для защиты накопителя 60 электрической энергии. То есть зарядно-разрядный показатель накопителя 60 электрической энергии (например, объем вырабатываемой электроэнергии первого МГ 20 с использованием двигателя 10) регулируют таким образом, чтобы исключить значительные колебания SOC. Учитывая влияние, существует вероятность того, что состояние привода (работа или остановка, выходная мощность при работе и т.п.) двигателя 10 будет легко ограничиваться требованиями SOC после выставления второго режима CS, что приведет к уменьшению эффективности использования топлива.
[0088] Следовательно, если запланированный маршрут движения транспортного средства 1 установлен, ЭБУ 100 гибридного транспортного средства выполняет «первое управление переключением CD-CS» вместо «второго управления переключением CD-CS (обычное управление переключением CD-CS)». Под первым управлением переключением CD-CS понимают управление прогнозируемой транспортной нагрузкой на запланированном маршруте движения до пункта назначения транспортного средства 1 с использованием информации о предполагаемом маршруте, полученной от навигационного устройства 130, и автоматическим переключением между режимами CD и CS в зависимости от прогнозируемой нагрузки, выполняемым таким образом, чтобы SOC был израсходован в момент прибытия в пункт назначения.
[0089] При первом управлении переключением CD-CS режим CS устанавливают до израсходования SOC (до снижения SOC до заданного значения Sth). Поэтому потребность в защите накопителя 60 электрической энергии путем поддержания SOC в режиме CS, установленном первым управлением переключением CD-CS (далее «первый режим CS»), невелика. Если, тем не менее, диапазон колебаний SOC, подобно второму режиму CS, невелик, существует вероятность того, что состояние привода двигателя 10 будет без необходимости ограничено. Например, легко может возникнуть ситуация, в которой двигатель 10 нужно остановить для снижения SOC даже на участке с высокой нагрузкой (участок скоростной дороги, участок с подъемом и т.п.) и высоким тепловым КПД двигателя 10. Кроме того, легко может возникнуть ситуация, в которой двигатель 10 должен работать для увеличения SOC даже на участке с низкой нагрузкой (участок городской дороги, участок с пробкой и т.п.) с низким тепловым КПД двигателя 10, или ситуация, в которой выходная мощность двигателя 10 не является оптимальной мощностью. В результате существует вероятность неоправданного снижения эффективности использования топлива даже при низкой потребности в защите накопителя 60 электрической энергии.
[0090] Учитывая вышесказанное, ЭБУ 100 гибридного транспортного средства в данном варианте осуществления расширяет допустимый диапазон колебаний SOC в первом режиме CS по сравнению с допустимым диапазоном колебаний SOC во втором режиме CS.
[0091] ФИГ. 5 – схема, показывающая пример изменения SOC накопителя 60 электрической энергии и пример изменения режима управления при осуществлении первого управления переключением CD-CS. На ФИГ. 5 по оси абсцисс отложено время, а по оси ординат – SOC.
[0092] При первом управлении переключением CD-CS ЭБУ 100 гибридного транспортного средства выполняет переключение между первым режимом CS и режимом CD на основании информации о предполагаемом маршруте движения. В примере, показанном на ФИГ. 5, режим управления SOC выставлен на первый режим CS на период от момента t1 времени до момента t2 времени и от момента t3 времени до момента t4 времени, и режим управления SOC выставлен на режим CD в другие периоды времени.
[0093] ЭБУ 100 гибридного транспортного средства в данном варианте осуществления расширяет допустимый диапазон колебаний SOC в первом режиме CS по сравнению с допустимым диапазоном колебаний SOC во втором режиме CS. Таким образом, в первом режиме CS состояние привода (работа или остановка, выходная мощность при работающем двигателе и т.п.) двигателя 10 труднее ограничить требованиями SOC по сравнению со вторым режимом CS; соответственно, состояние привода двигателя 10 легко определить по тепловому КПД двигателя 10. Это позволяет предотвратить снижение эффективности использования топлива в первом режиме CS.
[0094] Кроме того, ЭБУ 100 гибридного транспортного средства в данном варианте осуществления расширяет допустимый диапазон колебаний SOC в первом режиме CS по сравнению с допустимым диапазоном колебаний SOC в режиме CS, установленном вручную пользователем (далее «ручной режим CS»). Таким образом, в первом режиме CS состояние привода двигателя 10 труднее ограничивать требованиями SOC по сравнению с ручным режимом CS; соответственно, можно предотвратить снижение эффективности использования топлива.
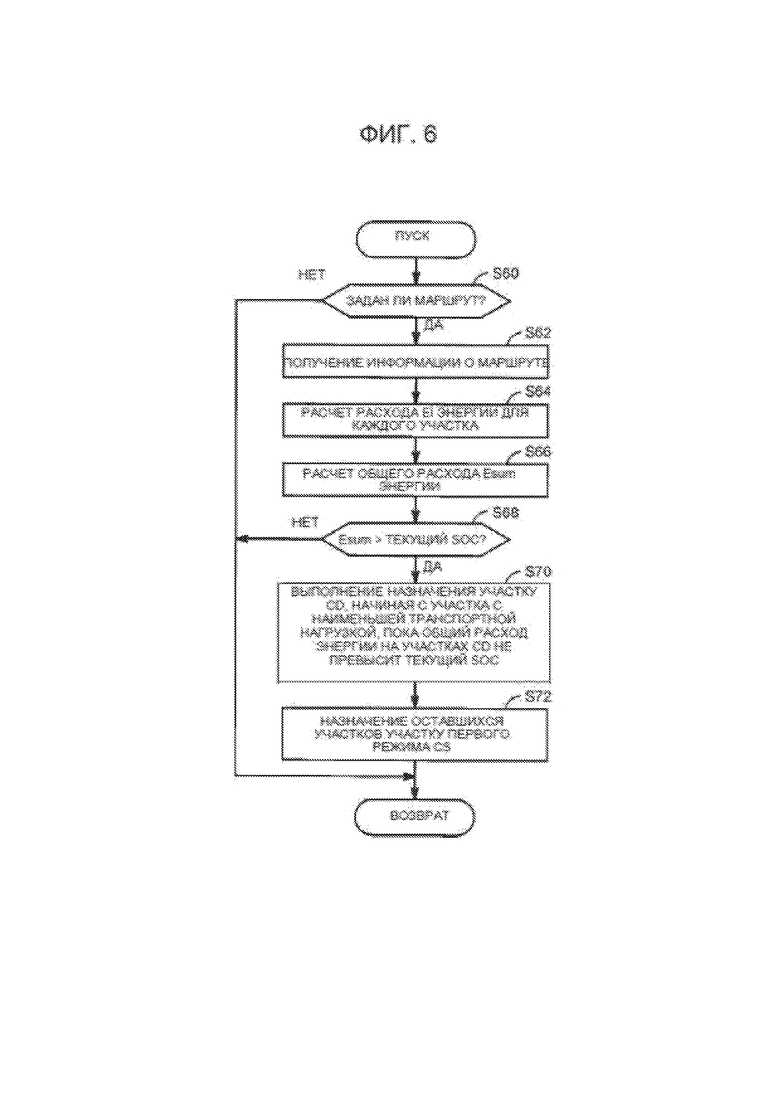
[0095] ФИГ. 6 – структурная схема, демонстрирующая пример процедуры обработки для настройки участка, в которой ЭБУ 100 гибридного транспортного средства осуществляет первый режим CS (далее «участок первого режима CS»). Эта структурная схема осуществляется многократно с заданной периодичностью.
[0096] ЭБУ 100 гибридного транспортного средства определяет, был ли установлен запланированный маршрут движения для транспортного средства 1 (этап S60). Если запланированный маршрут движения не был установлен (НЕТ на этапе S60), ЭБУ 100 гибридного транспортного средства не сможет спрогнозировать транспортную нагрузку и, следовательно, выйдет из процесса, пропустив следующие процессы (без настройки первого участка CS).
[0097] Если запланированный маршрут движения был установлен (ДА на этапе S60), ЭБУ 100 гибридного транспортного средства получает информацию о запланированном маршруте движения от навигационного устройства 130 (этап S62). Информация о запланированном маршруте содержит ряд участков (связей) i, включенных в планируемый маршрут движения, информацию об уклоне, информацию о категории дороги (городская дорога, скоростная автомагистраль или дорога общего пользования), информации о дорожном движении (пробки и т.п.) по каждому участку i и т.п.
[0098] Затем ЭБУ 100 гибридного транспортного средства рассчитывает расход Ei энергии для каждого участка на основании информации об уклоне, категории дороги и о дорожном движении по каждому участку i, включенному в информацию о запланированном маршруте (этап S64).
[0099] Затем ЭБУ 100 гибридного транспортного средства рассчитывает общий расход Ei энергии для участков i как общий расход Esum энергии (этап S66).
[0100] После этого ЭБУ 100 гибридного транспортного средства определяет, превышает ли общий расход Esum энергии, вычисленный на этапе S66, SOC в настоящее время (далее просто «текущий SOC») (этап S68). Во время этого процесса определяют, сможет ли транспортное средство 1 двигаться по запланированному маршруту движения только в режиме CD.
[0101] Если ЭБУ 100 гибридного транспортного средства не определяет, что общий расход Esum энергии не превышает текущий SOC (НЕТ на этапе S68), то ЭБУ 100 гибридного транспортного средства не требуется настраивать участок первого режима CS, так как транспортное средство 1 сможет полностью преодолеть запланированный маршрут в режиме CD. Таким образом, ЭБУ 100 гибридного транспортного средства пропускает последующие процессы и возвращает процесс.
[0102] Если ЭБУ 100 гибридного транспортного средства определяет, что общий расход Esum энергии превышает текущий SOC (ДА на этапе S68), то ЭБУ 100 гибридного транспортного средства назначает ряд участков, включенных в запланированный маршрут движения, участку, на котором выполняется режим CD (далее «участок CD»), начиная с участка с наименьшей транспортной нагрузкой (этап S70). В этом случае, ЭБУ 100 гибридного транспортного средства последовательно выполняет назначения участку CD до тех пор, пока общий расход энергии на участках CD не превысит текущий SOC.
[0103] После того, как ЭБУ 100 гибридного транспортного средства завершит назначение участку CD, он назначит участку первого режима CS оставшиеся участки, представляющие собой ряд участков, включенных в планируемый маршрут движения и не назначенных участку CD (этап S72).
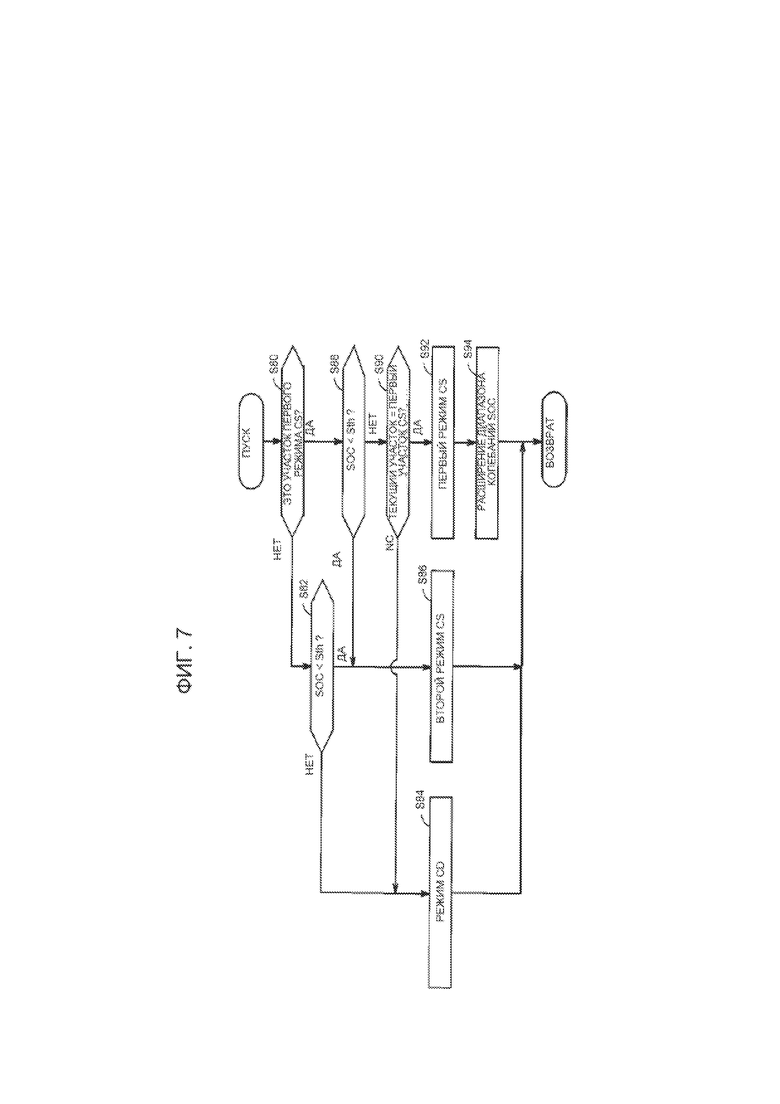
[0104] ФИГ. 7 – структурная схема, демонстрирующая пример процедуры обработки, выполняемой ЭБУ 100 гибридного транспортного средства для переключения между режимами CD и CS. Эта структурная схема осуществляется многократно с заданной периодичностью.
[0105] ЭБУ 100 гибридного транспортного средства определяет, существует ли участок первого режима CS, установленный процессом на этапе S72 (ФИГ. 6 (этап S80)).
[0106] В отсутствие участка первого режима CS (НЕТ на этапе S80), ЭБУ 100 гибридного транспортного средства выполняет «второе управление переключением CD-CS». В частности, ЭБУ 100 гибридного транспортного средства определяет, существуют ли архивные данные о снижении SOC ниже заданного значения Sth во время этой поездки (с активации системы управления транспортного средства 1 до следующей остановки) (этап S82). Если архивные данные, свидетельствующие о снижении SOC ниже заданного значения Sth (НЕТ на этапе S82), отсутствуют, ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в режим CD (этап S84). При наличии архивных данных, свидетельствующих о снижении SOC ниже заданного значения Sth (ДА на этапе S82), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в режим CS (этап S86).
[0107] С другой стороны, при наличии участка первого режима CS (ДА на этапе S80), ЭБУ 100 гибридного транспортного средства определяет, существуют ли архивные данные, указывающие на снижение SOC ниже заданного значения Sth во время этой поездки (этап S88).
[0108] При наличии архивных данных, свидетельствующих о снижении SOC ниже заданного значения Sth (ДА на этапе S88), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC во второй режим CS для защиты накопителя 60 электрической энергии (этап S86).
[0109] Если архивные данные, свидетельствующие о снижении SOC ниже заданного значения Sth (НЕТ на этапе S88), отсутствуют, ЭБУ 100 гибридного транспортного средства выполняет «первое управление переключением CD-CS». В частности, ЭБУ 100 гибридного транспортного средства определяет, является ли участок (текущий участок), по которому в настоящее время движется транспортное средство 1, участком первого режима CS (этап S90). Если текущий участок не является участком первого режима CS (НЕТ на этапе S90), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в режим CD (этап S84). Если текущий участок является участком первого режима CS (ДА на этапе S90), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в первый режим CS (этап S92).
[0110] После этого ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон колебаний SOC в первом режиме CS по сравнению с допустимым диапазоном колебаний SOC во втором режиме CS (этап S94). Расширение диапазона колебаний SOC может выполняться различными способами.
[0111] ЭБУ 100 гибридного транспортного средства в данном варианте осуществления расширяет диапазон колебаний SOC, регулируя «требуемую зарядно-разрядную мощность Pb», используемую для расчета требуемой мощности Pe двигателя при управлении приводом. В частности, ЭБУ 100 гибридного транспортного средства отключает защитный процесс на этапе S34 на ФИГ. 3 (ЭБУ 100 гибридного транспортного средства не осуществляет защитный процесс). Таким образом, требуемую зарядно-разрядную мощность Pb, используемую для расчета требуемой мощности Pe двигателя, рассчитывают по карте оптимальной эффективности использования топлива, то есть принимают требуемую зарядно-разрядную мощность, учитывающую только тепловой КПД двигателя 10 без учета SOC. Таким образом, SOC по скорости уменьшается, что затрудняет соответствие SOC эталонному значению. В результате диапазон колебаний SOC расширяется. Таким образом, ЭБУ 100 гибридного транспортного средства в данном варианте осуществления расширяет допустимый диапазон колебаний SOC в первом режиме CS путем простого отключения защитного процесса для требуемой зарядно-разрядной мощности Pb.
[0112] Способы регулирования требуемой зарядно-разрядной мощности Pb с расширением диапазона колебаний SOC не ограничиваются отключением защитного процесса. Например, ЭБУ 100 гибридного транспортного средства может смягчать ограничение, не полностью отключая защитный процесс. В частности, ЭБУ 100 гибридного транспортного средства может изменять «карту верхних и нижних предельных значений», используемую для расчета верхних и нижних предельных защитных значений на этапе S32 на ФИГ. 3 в целях уменьшения SOC по скорости. Кроме того, например, ЭБУ 100 гибридного транспортного средства может изменять «карту оптимальной эффективности использования топлива», применяемую для расчета требуемой зарядно-разрядной мощности Pb на этапе S30 на ФИГ. 3 в целях уменьшения SOC по скорости. Эти способы позволяют, в том числе, регулировать требуемую зарядно-разрядную мощность Pb таким образом, чтобы диапазон колебаний SOC расширялся.
[0113] Кроме того, способы расширения диапазона колебаний SOC не ограничиваются регулированием требуемой зарядно-разрядной мощности Pb. Например, ЭБУ 100 гибридного транспортного средства может изменять «порог Pstart запуска двигателя», применяемый для определения (этап S40 на ФИГ. 3) запуска двигателя 10 в системе управления приводом или изменять «порог Pstop остановки двигателя», применяемый для определения (этап S50 на ФИГ. 3) остановки двигателя 10. Кроме того, когда ЭБУ 100 гибридного транспортного средства непосредственно ограничивает диапазон колебаний SOC, выставляя SOC между верхним предельным значением SOC и нижним предельным значением SOC, ЭБУ 100 гибридного транспортного средства может расширить диапазон колебаний SOC, увеличивая верхнее предельное значение SOC или уменьшая нижнее предельное значение SOC.
[0114] Как было указано выше, при установленном запланированном маршруте движения транспортного средства 1 ЭБУ 100 гибридного транспортного средства в данном варианте осуществления выполняет первое управление переключением CD-CS. В этом случае ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон колебаний SOC в «первом режиме CS», установленном первым управлением переключением CD-CS, по сравнению с допустимым диапазоном колебаний SOC в других режимах CS (втором режиме CS и ручном режиме CS). Таким образом, в первом режиме CS состояние привода двигателя 10 труднее ограничивать требованиями SOC по сравнению с другими режимами CS; соответственно, можно обеспечить эффективную работу двигателя 10. Это позволяет предотвратить снижение эффективности использования топлива в первом режиме CS.
[0115] В частности, если SOC превышает заданное значение Sth (то есть при низкой потребности в защите накопителя 60 электрической энергии), ЭБУ 100 гибридного транспортного средства в данном варианте осуществления выставляет первый режим CS и расширяет диапазон колебаний SOC в режиме CS. Таким образом, в первом режиме CS можно предотвратить нежелательное снижение эффективности использования топлива даже при низкой потребности в защите накопителя 60 электрической энергии.
Первая модификация
[0116] В этом примерном варианте осуществления ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон колебаний SOC в первом режиме CS независимо от скорости VS транспортного средства. Тем не менее, ЭБУ 100 гибридного транспортного средства может расширять допустимый диапазон колебаний SOC в первом режиме CS в зависимости от скорости VS транспортного средства.
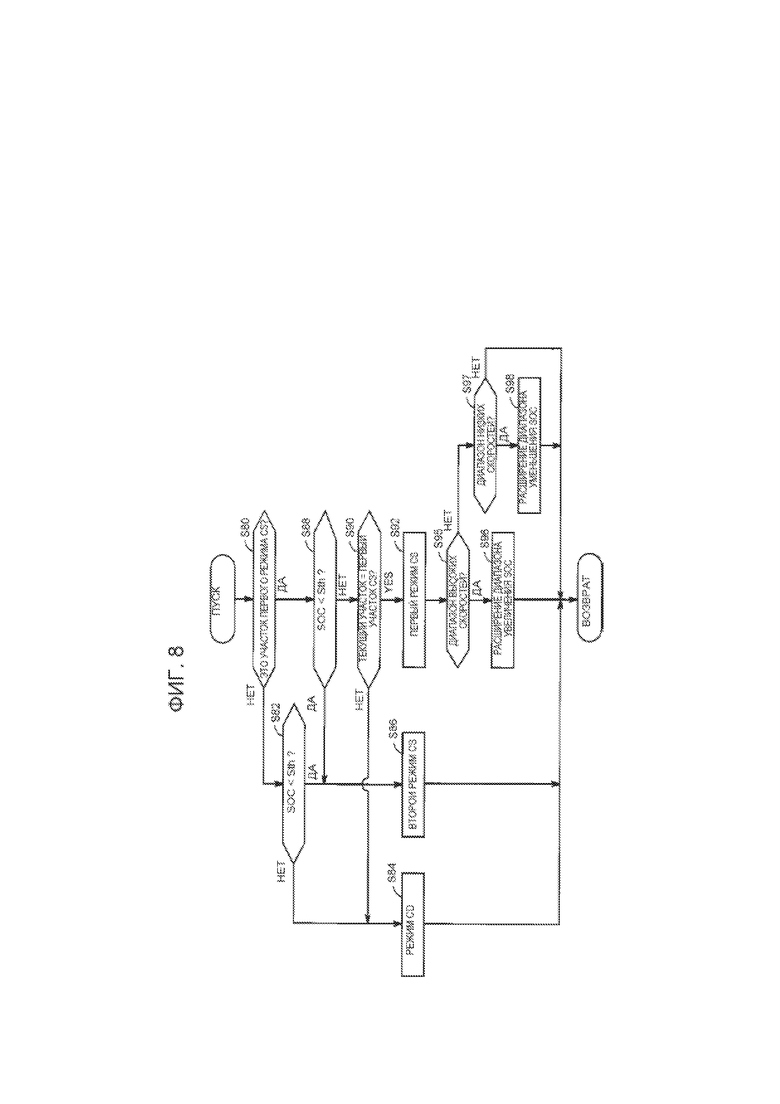
[0117] ФИГ. 8 – структурная схема, демонстрирующая пример процедуры обработки, выполняемой ЭБУ 100 гибридного транспортного средства в первой модификации для переключения между режимами CD и CS. На структурной схеме (ФИГ. 8) добавлены процессы этапов S95–S98, заменяющие процесс этапа S94 на структурной схеме ФИГ. 7. Описание прочих этапов (этапов со ссылочными обозначениями, соответствующими этапам на ФИГ. 7) дано выше и не будет повторно включено в описание данной схемы.
[0118] После того как ЭБУ 100 гибридного транспортного средства переведет режим управления SOC в первый режим CS на этапе S92, ЭБУ 100 гибридного транспортного средства определяет, находится ли скорость VS транспортного средства в диапазоне высоких скоростей, превышающем порог высоких скоростей (этап S95).
[0119] Если скорость VS транспортного средства попадает в диапазон высоких скоростей (ДА на этапе S95), ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон увеличения SOC в первом режиме CS, уменьшая «порог Pstop остановки двигателя», применяемый на этапе S50 по ФИГ. 3, по сравнению со скоростью VS транспортного средства, не попадающей в диапазон высоких скоростей (этап S96).
[0120] Тем самым расширяется диапазон увеличения SOC в диапазоне высоких скоростей в первом режиме CS. Таким образом, в диапазоне больших скоростей, характеризующемся высоким тепловым КПД двигателя 10, двигатель 10 трудно остановить, а режим работы двигателя 10 легко поддерживать. В результате можно повысить эффективность управления двигателем 10 и эффективность использования топлива.
[0121] С другой стороны, если скорость VS транспортного средства не попадает в диапазон высоких скоростей (НЕТ на этапе S95), ЭБУ 100 гибридного транспортного средства определяет, попадает ли скорость VS транспортного средства в диапазон низких скоростей ниже порога низких скоростей (этап S97).
[0122] Если скорость VS транспортного средства попадает в диапазон низких скоростей (ДА на этапе S97), ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон уменьшения SOC в первом режиме CS, увеличивая «порог Pstart запуска двигателя», применяемый на этапе S40 по ФИГ. 3, по сравнению со скоростью VS транспортного средства, не попадающей в диапазон низких скоростей (этап S98).
[0123] Тем самым расширяется диапазон уменьшения SOC в диапазоне низких скоростей в первом режиме CS. Таким образом, в диапазоне малых скоростей, который характеризуется низким тепловым КПД двигателя 10, двигатель 10 трудно запустить, а состояние остановки двигателя 10 легко поддерживать. Это позволяет затруднить работу двигателя 10 в режиме низкого теплового КПД и, соответственно, ограничить снижение эффективности использования топлива.
[0124] Таким образом, в первом режиме CS ЭБУ 100 гибридного транспортного средства может расширять допустимый диапазон увеличения SOC в случае высокой скорости транспортного средства и допустимый диапазон уменьшения SOC в случае низкой скорости транспортного средства.
Вторая модификация
[0125] В первой модификации ЭБУ 100 гибридного транспортного средства в первом режиме CS расширяет допустимый диапазон увеличения SOC в случае высокой скорости транспортного средства и допустимый диапазон уменьшения SOC в случае низкой скорости транспортного средства. Тем не менее, в первом режиме CS ЭБУ 100 гибридного транспортного средства может расширять допустимый диапазон колебаний SOC при работающем двигателе 10.
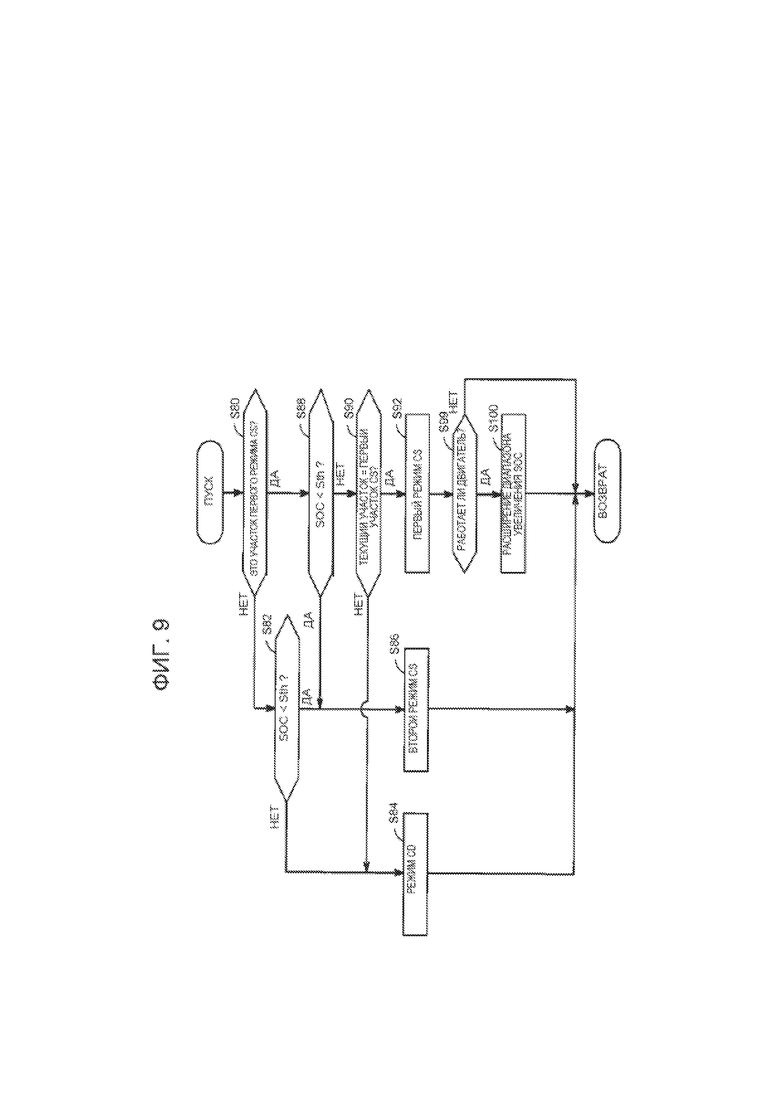
[0126] ФИГ. 9 – структурная схема, демонстрирующая пример процедуры обработки, выполняемой ЭБУ 100 гибридного транспортного средства во второй модификации для переключения между режимами CD и CS. На структурной схеме (ФИГ. 9) добавлены процессы этапов S99 и S100, заменяющие процесс этапа S94 на структурной схеме ФИГ. 7. Описание прочих этапов (этапов со ссылочными обозначениями, соответствующими этапам на ФИГ. 7) дано выше и не будет повторно включено в описание данной схемы.
[0127] После того, как ЭБУ 100 гибридного транспортного средства переведет режим управления SOC в первый режим CS на этапе S92, ЭБУ 100 гибридного транспортного средства определяет, работает ли двигатель 10 (этап S99). Если двигатель 10 не работает (НЕТ на этапе S99), ЭБУ 100 гибридного транспортного средства пропускает следующий процесс и возвращает процесс.
[0128] Если двигатель 10 работает (ДА на этапе S99), ЭБУ 10 гибридного транспортного средства расширяет допустимый диапазон увеличения SOC в первом режиме CS, уменьшая «порог Pstop остановки двигателя», применяемый на этапе S50 по ФИГ. 3, по сравнению с состоянием остановки двигателя 10 (этап S100).
[0129] Таким образом, когда двигатель 10 работает в первом режиме CS, остановка двигателя 10 затруднена и, соответственно, количество запусков двигателя 10 уменьшается. Это позволяет улучшить ходовые характеристики.
Третья модификация
[0130] В этом варианте осуществления ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон колебаний SOC в первом режиме CS. Тем не менее, в рамках первого управления переключением CD-CS ЭБУ 100 гибридного транспортного средства выполняет назначение на участок CD и участок первого режима CS таким образом, чтобы SOC оказался израсходованным ко времени прибытия в пункт назначения. Поэтому, когда ЭБУ 100 гибридного транспортного средства расширяет диапазон колебаний SOC (диапазон увеличения SOC) на участке первого режима CS несмотря на ближайший пункт назначения, существует вероятность, что остаточный SOC окажется выше ожидаемого к моменту прибытия в пункт назначения.
[0131] Учитывая вышесказанное, ЭБУ 100 гибридного транспортного средства в третьей модификации уменьшает допустимый диапазон увеличения SOC, если оставшееся расстояние до места назначения оказывается короче порогового расстояния Dth во время расширения допустимого диапазона колебаний SOC в первом режиме CS. Таким образом, можно не допустить превышения ожидаемого SOC на момент прибытия в пункт назначения.
[0132] Для сокращения допустимого диапазона увеличения SOC можно применять различные способы. Например, ЭБУ 100 гибридного транспортного средства может изменять верхние и нижние предельные защитные значения требуемой зарядно-разрядной мощности Pb в зависимости от оставшегося расстояния до пункта назначения. Кроме того, ЭБУ 100 гибридного транспортного средства может возвращать диапазон колебаний SOC (увеличения или уменьшения SOC) на уровень второго режима CS путем перевода режима управления SOC во второй режим CS. ЭБУ 100 гибридного транспортного средства может сокращать диапазон увеличения SOC при расширении диапазона уменьшения SOC.
[0133] Ниже описан пример возврата диапазона колебаний SOC (увеличения или уменьшения SOC) на уровень второго режима CS путем перевода режима управления SOC во второй режим CS.
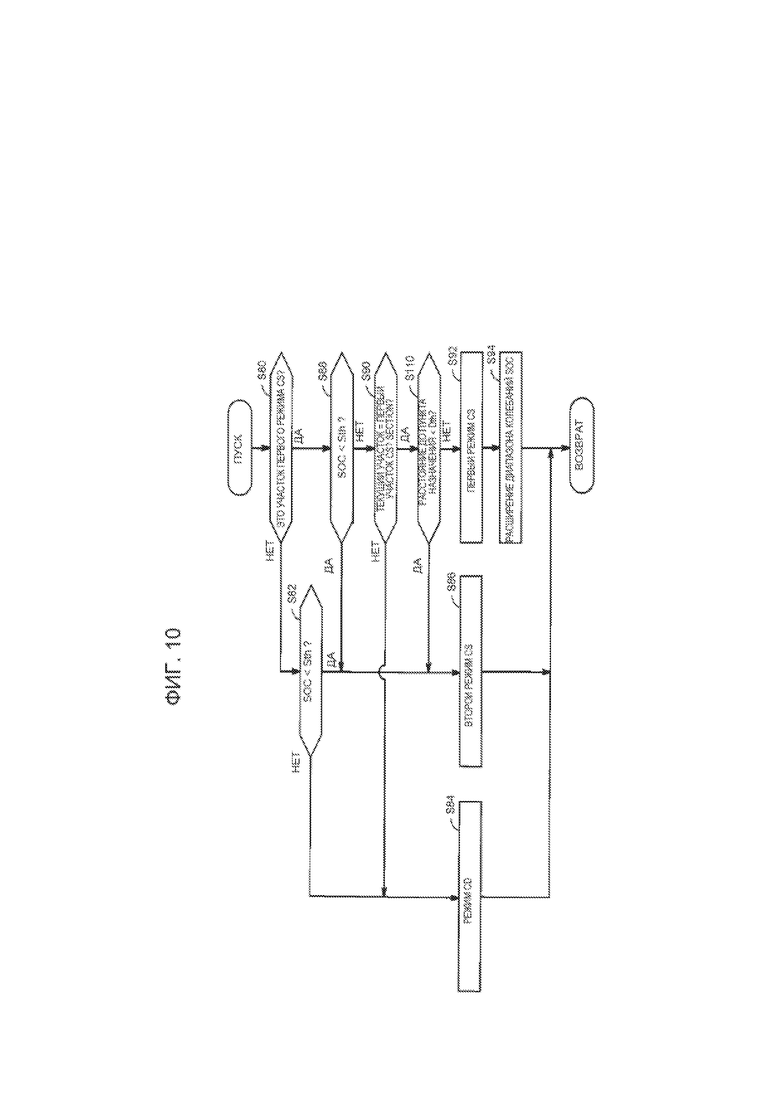
[0134] ФИГ. 10 – структурная схема, демонстрирующая пример процедуры обработки, выполняемой ЭБУ 100 гибридного транспортного средства в третьей модификации для переключения между режимами CD и CS. На структурной схеме (ФИГ. 10) добавлен процесс этапа S110 к структурной схеме ФИГ. 7. Описание прочих этапов (этапов со ссылочными обозначениями, соответствующими этапам на ФИГ. 7) дано выше и не будет повторно включено в описание данной схемы.
[0135] Если ЭБУ 100 гибридного транспортного средства на этапе S90 обнаружит, что текущий участок является участком первого режима CS (ДА на этапе S90), ЭБУ 100 гибридного транспортного средства определяет, будет ли оставшееся расстояние до пункта назначения (этап S110) меньше порогового расстояния Dth.
[0136] Когда ЭБУ 100 гибридного транспортного средства обнаружит, что оставшееся расстояние до места назначения не меньше порогового расстояния Dth (НЕТ на этапе S110), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в первый режим CS (этап S92) и расширяет допустимый диапазон колебаний SOC по сравнению со вторым режимом CS (этап S94).
[0137] С другой стороны, если ЭБУ 100 гибридного транспортного средства обнаружит, что оставшееся расстояние до места назначения меньше порогового расстояния Dth (ДА на этапе S110), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC во второй режим CS вместо первого режима CS (этап S86). Таким образом, если оставшееся расстояние до пункта назначения меньше порогового расстояния Dth, допустимый диапазон увеличения SOC будет сокращен по сравнению с поддержкой первого режима CS. Таким образом, можно не допустить превышения ожидаемого SOC на момент прибытия в пункт назначения.
Четвертая модификация
[0138] В этом варианте осуществления ЭБУ 100 гибридного транспортного средства расширяет допустимый диапазон колебаний SOC в первом режиме CS.
[0139] Тем не менее, если ЭБУ 100 гибридного транспортного средства расширяет диапазон колебаний SOC (диапазон уменьшения SOC) в первом режиме CS даже в случае снижения SOC до значения, близкого к заданному значению Sth (немного превышающему заданное значение Sth), существует вероятность снижения SOC до заданного значения Sth до прибытия в пункт назначения и завершения первого управления переключением CD-CS раньше ожидаемого времени.
[0140] Учитывая вышесказанное, ЭБУ 100 гибридного транспортного средства в четвертой модификации уменьшает допустимый диапазон уменьшения SOC, если SOC опускается ниже порогового уровня S1 (S1>Sth) во время расширения допустимого диапазона колебаний SOC в первом режиме CS. Таким образом, можно предотвратить снижение SOC до заданного значения Sth до прибытия в пункт назначения и не допустить завершения первого управления переключением CD-CS раньше ожидаемого времени.
[0141] Для сокращения допустимого диапазона уменьшения SOC можно применять различные способы. Например, ЭБУ 100 гибридного транспортного средства может возвращать диапазон колебаний SOC (увеличения или уменьшения SOC) на уровень второго режима CS. ЭБУ 100 гибридного транспортного средства может сокращать диапазон уменьшения SOC при расширении диапазона увеличения SOC.
[0142] Ниже описан пример возврата диапазона колебаний SOC (увеличения или уменьшения SOC) на уровень второго режима CS путем перевода режима управления SOC во второй режим CS.
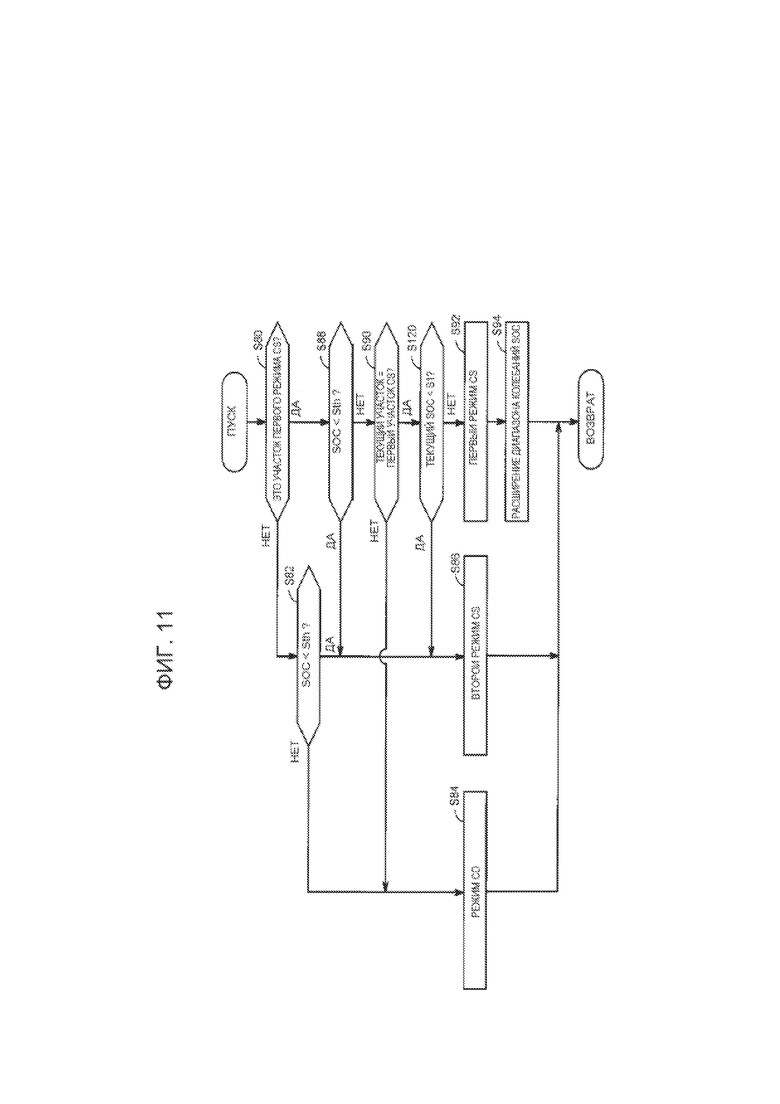
[0143] ФИГ. 11 – структурная схема, демонстрирующая пример процедуры обработки, выполняемой ЭБУ 100 гибридного транспортного средства в четвертой модификации для переключения между режимами CD и CS. На структурной схеме (ФИГ. 11) добавлен процесс этапа S120 к структурной схеме ФИГ. 7. Описание прочих этапов (этапов со ссылочными обозначениями, соответствующими этапам на ФИГ. 7) дано выше и не будет повторно включено в описание данной схемы.
[0144] Если ЭБУ 100 гибридного транспортного средства на этапе S90 обнаружит, что текущий участок является участком первого режима CS (ДА на этапе S90), ЭБУ 100 гибридного транспортного средства определяет, опустился ли текущий SOC ниже порогового значения S1 (этап S120). В данном случае пороговый уровень S1 выставлен на значение, немного превышающее заданное значение Sth.
[0145] Если ЭБУ 100 гибридного транспортного средства обнаружит, что текущий SOC не ниже порогового уровня S1 (НЕТ на этапе S120), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC в первый режим CS (этап S92) и расширяет допустимый диапазон колебаний SOC по сравнению со вторым режимом CS (этап S94).
[0146] С другой стороны, если ЭБУ 100 гибридного транспортного средства обнаружит, что текущий SOC ниже порогового уровня S1 (ДА на этапе S120), ЭБУ 100 гибридного транспортного средства переводит режим управления SOC во второй режим CS вместо первого режима CS (этап S86). Таким образом, если текущий SOC ниже порогового уровня S1, допустимый диапазон уменьшения SOC будет сокращен по сравнению с поддержкой первого режима CS. Таким образом, можно предотвратить снижение SOC до заданного значения Sth до прибытия в пункт назначения и не допустить завершения первого управления переключением CD-CS раньше ожидаемого времени.
[0147] Вариант осуществления и модификации 1-4 могут быть соответствующим образом объединены при условии сохранения технологической согласованности.
[0148] Варианты осуществления, раскрытые в описании, даны для примера и не носят какого-либо ограничительного характера. Имеется в виду, что защищаемый объем изобретения определяется формулой изобретения, а не вышеприведенным описанием, и включает все варианты значений и объема притязаний, эквивалентные формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2657631C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2019 |
|
RU2702056C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2632390C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2421353C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2662330C2 |
| ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ДАННЫХ, УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ ДАННЫХ | 2021 |
|
RU2753262C1 |
| КОНТРОЛЛЕР ПЕРЕКЛЮЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ГИБРИДНОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2566805C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2659307C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2625702C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2397089C1 |
Изобретение относится к гибридным транспортным средствам. Гибридное транспортное средство содержит двигатель внутреннего сгорания, мотор-генератор, накопитель электроэнергии и управляющее устройство, выставляющее режим управления уровнем заряда накопителя на режим использования заряда или режим подзарядки. Управляющее устройство расширяет допустимый диапазон колебаний уровня заряда накопителя электроэнергии в режиме подзарядки, когда управляющее устройство осуществляет первое управление переключением, по сравнению с ситуацией, когда управляющее устройство это управление не осуществляет. Под первым управлением переключением понимают управление, при котором управляющее устройство автоматически переключается между режимами использования заряда и подзарядки, частично основываясь на прогнозируемой нагрузке на запланированном маршруте движения гибридного транспортного средства. Ограничивается снижение эффективности использования топлива. 7 з.п. ф-лы, 11 ил.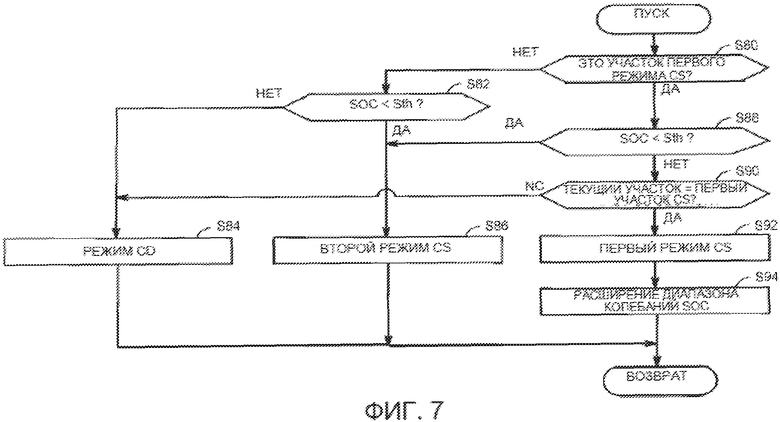
1. Гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания;
мотор-генератор, соединенный по меньшей мере с одним двигателем внутреннего сгорания и ведущим колесом;
накопитель электрической энергии, электрически соединенный с мотор-генератором; и
управляющее устройство, выполненное с возможностью выставления режима управления уровнем заряда накопителя электрической энергии на режим использования заряда или режим подзарядки, отличающееся тем, что
управляющее устройство выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда накопителя электрической энергии в режиме подзарядки, когда управляющее устройство осуществляет первое управление переключением, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением, причем под первым управлением переключением понимают управление, при котором управляющее устройство автоматически переключается между режимами использования заряда и подзарядки, по меньшей мере, частично основываясь на прогнозируемой нагрузке на запланированном маршруте движения гибридного транспортного средства.
2. Гибридное транспортное средство по п. 1, в котором
управляющее устройство выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда в режиме подзарядки, когда управляющее устройство осуществляет первое управление переключением, а уровень заряда превышает нижнее предельное значение заряда, позволяющее движение в режиме использования заряда, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
3. Гибридное транспортное средство по п. 1 или 2, в котором
управляющее устройство выполнено с возможностью предотвращения отклонения уровня заряда от эталонного значения с помощью защитного процесса, заключающегося в ограничении требуемой зарядно-разрядной мощности накопителя электрической энергии диапазоном, определяемым верхним предельным защитным значением и нижним предельным защитным значением, и
управляющее устройство выполнено с возможностью расширения допустимого диапазона колебаний уровня заряда в режиме подзарядки путем отключения или смягчения ограничения требуемой зарядно-разрядной мощности в рамках защитного процесса.
4. Гибридное транспортное средство по любому из пп. 1, 2, в котором
управляющее устройство выполнено с возможностью остановки двигателя внутреннего сгорания при снижении требуемой мощности до уровня ниже порога остановки при работающем двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона увеличения уровня заряда в режиме подзарядки путем уменьшения порога остановки, когда управляющее устройство осуществляет первое управление переключением, а скорость транспортного средства находится в диапазоне больших скоростей, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
5. Гибридное транспортное средство по любому из пп. 1, 2, в котором
управляющее устройство выполнено с возможностью запуска двигателя внутреннего сгорания при превышении требуемой мощностью двигателя внутреннего сгорания порога запуска при остановленном двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона снижения уровня заряда в режиме подзарядки путем увеличения порога запуска, когда управляющее устройство осуществляет первое управление переключением, а скорость транспортного средства находится в диапазоне малых скоростей, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
6. Гибридное транспортное средство по любому из пп. 1, 2, в котором
управляющее устройство выполнено с возможностью остановки двигателя внутреннего сгорания при снижении требуемой мощности до уровня ниже порога остановки при работающем двигателе внутреннего сгорания, а также с возможностью расширения допустимого диапазона увеличения уровня заряда в режиме подзарядки путем уменьшения порога остановки, когда управляющее устройство осуществляет первое управление переключением, а двигатель внутреннего сгорания работает, по сравнению с ситуацией, в которой управляющее устройство не осуществляет первое управление переключением.
7. Гибридное транспортное средство по любому из пп. 1, 2, в котором
управляющее устройство выполнено с возможностью уменьшения допустимого диапазона увеличения уровня заряда, если оставшееся расстояние до пункта назначения окажется меньше порогового расстояния при расширении диапазона колебаний уровня заряда в накопителе электрической энергии.
8. Гибридное транспортное средство по любому из пп. 1, 2, в котором
управляющее устройство выполнено с возможностью уменьшения допустимого диапазона уменьшения уровня заряда, если уровень заряда окажется ниже порогового уровня при расширении диапазона колебаний уровня заряда в накопителе электрической энергии.
| JP 2016215838 A, 22.12.2016 | |||
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НЕОБХОДИМОЙ СТЕПЕНИ ЗАРЯЖЕННОСТИ ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2012 |
|
RU2607469C2 |
| ЭЛЕКТРОМОБИЛЬ И ЗАРЯДНОЕ УСТРОЙСТВО БОРТОВОГО АККУМУЛЯТОРА ДЛЯ ЭТОГО ЭЛЕКТРОМОБИЛЯ | 2010 |
|
RU2570242C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ УПРАВЛЕНИЯ ЭНЕРГИЕЙ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2664134C1 |
| US 20090319110 A1, 24.12.2009 | |||
| WO 2008039725 A2, 03.04.2008. | |||

