Настоящая заявка относится к технике визуализации in-vivo. Настоящая заявка находит применение, в частности, к последовательности выполняемых действий и программной обработке в связи с визуализацией мелких животных в исследовательской среде, и ее описание приведено ниже с рассмотрением упомянутого конкретного применения. Следует понимать, что настоящая заявка находит применение также в других клинических и исследовательских учреждениях, например, для исследования на людях.
Современные существующие сканеры для формирования изображений не снабжаются стандартным оборудованием и техническими средствами, которые поддерживают автоматизированную и научно строгую последовательность выполняемых действий, пригодную для проверки врачебных гипотез. Доклиническая визуализация помогает заполнить пробел между планами лечения, которые еще не опробованы с точки зрения надежности, и применением для лечения людей. Доклиническое исследование с визуализацией на животных можно использовать при определении условий и конечных результатов для клинических испытаний. В частности, доклиническая визуализация in-vivo мелких животных обеспечивает возможность визуализации и количественного выражения метаболической активности, пролиферации клеток, апоптоза, состояния и иммунных реакций рецепторов, ангиогенеза и гипоксии, помимо других важных биологических процессов. Упомянутое исследование выполняют косвенным измерением экспрессии генов, ферментативной активности, рецепторов и переносчиков, и регионарных концентраций молекул с помощью множества разнообразных средств, чаще всего, с использованием методов эмиссионной визуализации с радиоизотопными индикаторами.
Упомянутое исследование отличается программами, направляемыми любознательностью и гипотезами, и часто поддерживаемыми согласием на выявление или исследование новых представлений о биологических процессах. По существу, особенно необходимы такие характеристики устройств, как чувствительность и пространственное разрешение, особенно, на фоне постоянной потребности в визуализации все более мелких структур и процессов. Кроме того, потребность в количественной оценке упомянутых процессов возрастает по мере того, как исследование переходит от описательных систем к измерительным системам. Данную работу выполняют, главным образом, в академических медицинских центрах. По существу, коллективное знание распространяется посредством публикаций, конференций и симпозиумов. Ограниченные применения, обычно, также осуществляются в надежде на перспективные научные результаты. Критерии благоприятного результата включают в себя способность четко и эффективно доказать и расширить понимание, независимо от того, приводит ли оно к непосредственной коммерческой деятельности или нет.
Более конкретным выражением биологического исследования является методичное обнаружение и разработка биомаркеров, лекарств и методов лечения, которые, в конечном счете, будут перенесены с модельных животных на людей, если окажутся перспективными во время доклинических исследований. Выделение данной области из более многообразной общей биологической области обусловлено необходимостью следовать стандартизованным выверенным процессам, допускающим поддержку нормативно регламентированной регистрации. По существу, данная работа обычно (хотя, и не исключительно) проводится в коммерческих фармацевтических компаниях и/или компаниях, выпускающих инструментарий, когда упомянутые компании стремятся к нахождению, разработке и, в конечном счете, коммерциализации лекарств и методов лечения для получения экономической выгоды, а не только для создания общих знаний о процессах.
Количественный анализ важен для надежной оценки собранных данных. Без информации о концентрации индикатора в физических абсолютных единицах, разные индикаторы нельзя объективно сравнивать между собой в контексте разработки индикаторов. Кроме того, количество диагностической информации, извлеченной из собранных изображений, в решающей степени зависит от пригодности данных для количественного анализа. В частности, при визуализации мелких животных, множество различных соображений, например эффекты парциальных объемов, имеют большое значение и должны быть скорректированы, чтобы получать имеющие смысл величины концентраций. Упомянутые эффекты можно подавлять с помощью схемы режима одиночной визуализации и/или поправок, с использованием данных, полученных дополнительным средством, например (но без ограничения) анатомической информации из СТ (компьютерно томографического) изображения, которое может быть полезно в этом смысле.
Количественный анализ имеет ценность на рынке. Существуют инструментальные программные средства, занимающиеся частичной коррекцией объема движения и т.п., которые полезны для надежного количественного анализа. Визуализация животных имеет большое значение в процессе разработки и проверки пригодности индикаторов путем сокращения времени и усилий, которые приходится затрачивать на оценку свойств индикаторов. В случае визуализации in-vivo можно выполнять последовательный анализ одного и того же животного через некоторый период времени и, тем самым, исследовать, например, биологическое распределение индикатора через длительное время. Без визуализации, для такого же исследования потребовалось множество животных, которых потребовалось бы умертвлять в разные моменты времени для измерения распределения индикатора с помощью способов in-vitro. Кроме того, при применении данных методов в качестве фармакокинетического моделирования, можно оценивать несколько биологических параметров сразу в течение одной процедуры визуализации.
Фармакокинетическое моделирование фармакодинамики позволяет одновременно оценивать сразу несколько биологических и молекулярных параметров. Поскольку распределение индикатора в животном с течением времени является динамическим процессом, то статическое изображение содержит только ограниченную информацию, по сравнению с анализом динамических последовательностей, которые обеспечивают доступ к константам скорости, управляющими кинетическими процессами.
Доклинические применения для поддержки данной деятельности можно резюмировать с обеспечением для пользователей возможностей выполнения исследований разного объема, при этом на каждом уровне подчеркиваются требования к устройству или его главные принципы;
Измерение на моментальном снимке одного объекта, например, что касается поглощения;
Изменение активности со временем в течение 15 периодов полураспада радиоизотопной метки;
Продольное исследование одного объекта на протяжении нескольких сеансов визуализации;
Групповое исследование нескольких объектов в одной лаборатории; и
Анализ совокупности по нескольким распределенным исследованиям и/или несколькими методами.
Уровни относятся в большей степени к процессам выявления и разработки лекарств и биомаркеров. Программные приложения, реализующие данные виды исследований, важны потому, поскольку их применение облегчает стандартизацию, имеющую следствием более высокое качество и более высокую воспроизводимость исследований, и заменяет занимающие много времени и подверженные ошибкам ручные способы или заказное программирование, которое является особенно сложным делом, принимая во внимание объем данных, связанных с упомянутой работой. Необходимой стандартизации следует добиваться с помощью приборов, а не полагаться на отдельных принципиальных исследователей.
В настоящей заявке предлагается новый и улучшенный способ работы с мелкими животными, их визуализации и анализа данных исследования упомянутых животных, чтобы решать вышеупомянутые и другие проблемы.
В соответствии с одним аспектом предлагается система визуализации in-vivo. По меньшей мере, одно средство визуализации для сбора in-vivo данных для визуализации объекта в области визуализации визуализирующего устройства. Реконструирующий процессор реконструирует представляемое изображение по исходным данным. Подготовительный модуль обеспечивает пространство, в котором объекты подготавливают к визуализации в средстве визуализации. Исследовательская рабочая станция обеспечивает пользователю электронный интерфейс для взаимодействия со средством визуализации.
В соответствии с другим аспектом предлагается способ визуализации in-vivo. Исследование предназначено для исполнения в системе визуализации in-vivo. Требуемые действия по извлечению информации из массивов данных и вычислительной биоинформатике выбирают, чтобы дополнить исследование с визуализацией.
Данные для визуализации собирают и обрабатывают. Обработанные данные для визуализации выражаются в количественной форме. Обработанные данные для визуализации и/или результаты вычислительных операций подвергаются статистическому анализу. Затем статистический анализ представляется в такой отчетной форме, которую выбирает пользователь.
В соответствии с другим аспектом предлагается исследовательская рабочая станция для проектирования исследования с визуализацией in-vivo. Рабочая станция содержит портал для проектирования исследования для создания и описания исследования. Пользователь может выбирать надлежащие данные для исследования из ресурсов, к которым имеет доступ рабочая станция, в портале для извлечения информации из данных. Пользователь может выбирать доступные инструментальные программы из порталов для сбора, реконструкции и/или обработки изображения. Пользователь может выбирать доступные инструментальные программы из предварительно заданного набора инструментальных программ и клинических пакетов в портале для количественного анализа.
Пользователь может выбирать в портале для статистического анализа, по меньшей мере, что-то одно из предварительно заданного анализа и специального постпроцессингового анализа. Портал для генерации отчетов дает пользователю возможность настраивать способ представления отчетных данных.
В соответствии с другим аспектом предлагается способ проектирования исследования. Пользователем формулируется гипотеза, допускающая проверку на оборудовании для визуализации in-vivo. На компьютере рабочей станции запускается подпрограмма последовательности действий по проектированию исследования. Задается взаимосвязь между способами визуализации и вычислений. Задаются параметры исследования. Когда проектируют исследование, получают уровень достоверности при проектировании исследования путем запроса восстановления модели с вероятными результатами исследования.
Одно преимущество заключается в совершенствовании воспроизводимости исследований,
Другое преимущество заключается в большей гибкости проектирования и исполнения исследований пользователем.
Другое преимущество заключается в доступе к существующим исследованиям и информационным базам данных.
Другое преимущество заключается в возможности использования стандартизованных протоколов для исследований с визуализацией.
Другое преимущество заключается в структурированной постобработке данных для визуализации, чтобы максимально повысить статистическую достоверность результатов.
Другое преимущество заключается в способности использовать отчетные результаты для нормативно регламентированной регистрации, которая доказывает эффективность новых средств диагностики и лекарств.
Дополнительные преимущества настоящего изобретения будут очевидны специалистам со средним уровнем компетентности в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение может быть выполнено в виде различных компонентов и схем расположения компонентов и различных этапов и схем расположения этапов. Чертежи приведены только с целью пояснения предпочтительных вариантов осуществления и не подлежат интерпретации как ограничивающие изобретение.
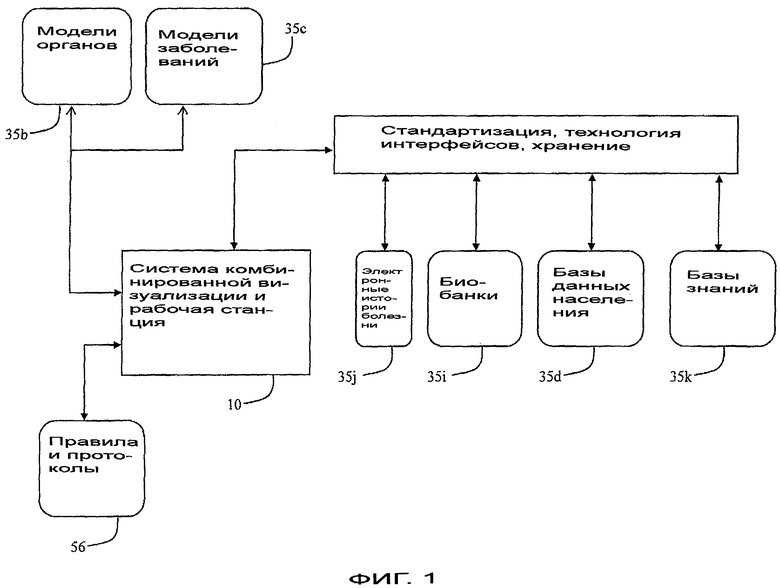
Фиг.1 - изображение среды, в которой предполагается функционирование описанных системы и рабочей станции;
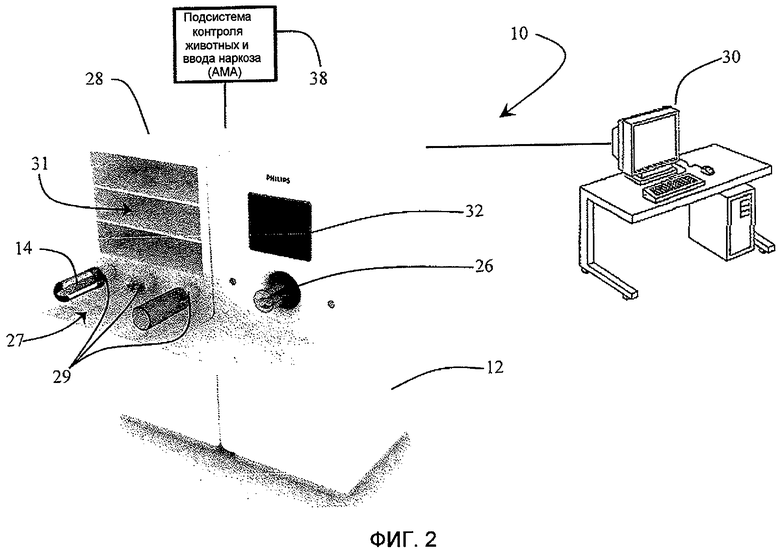
Фиг.2 - схематичное изображение системы визуализации животных в соответствии с настоящей заявкой;
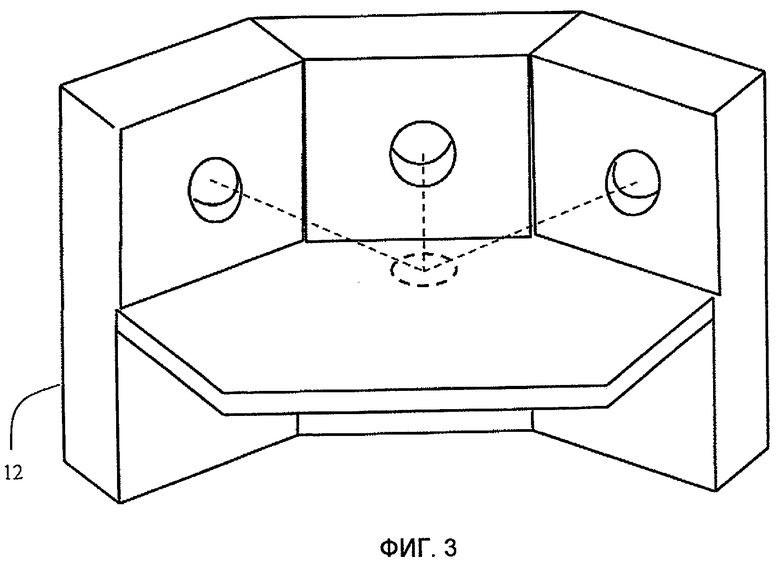
Фиг.3 - изображение нескольких средств, ориентированных радиально относительно общей центральной точки;
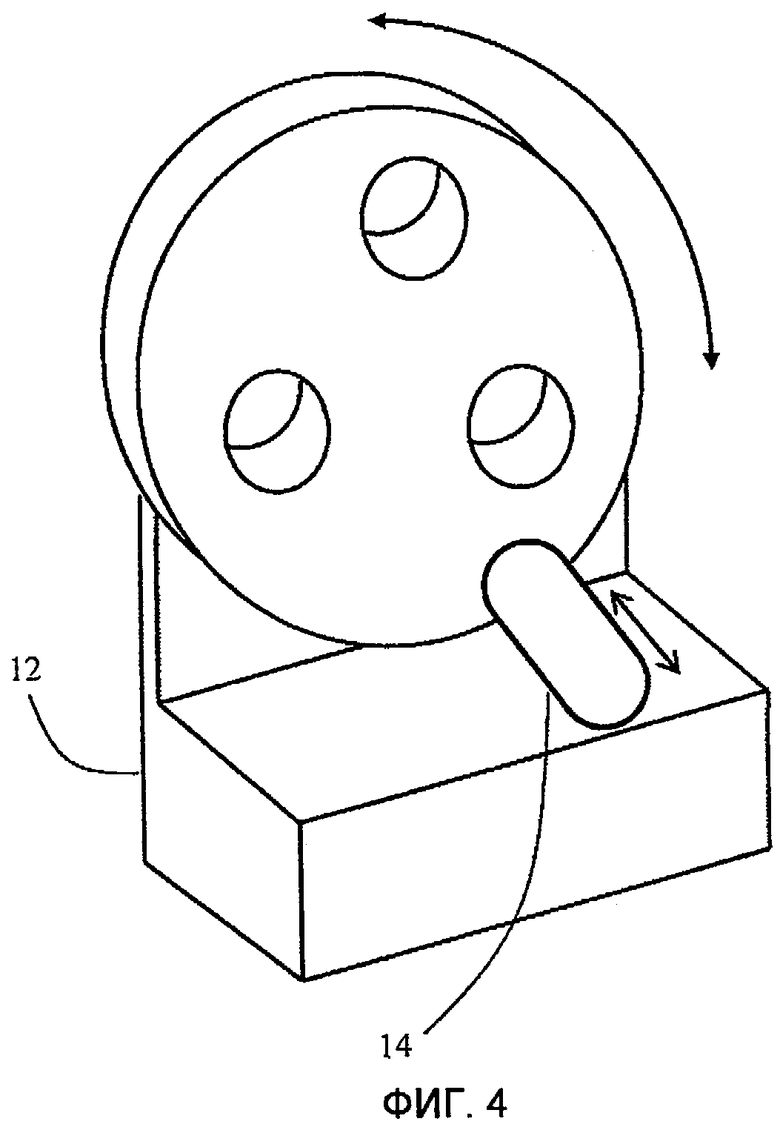
Фиг.4 - изображение поворотного гентри с несколькими средствами;
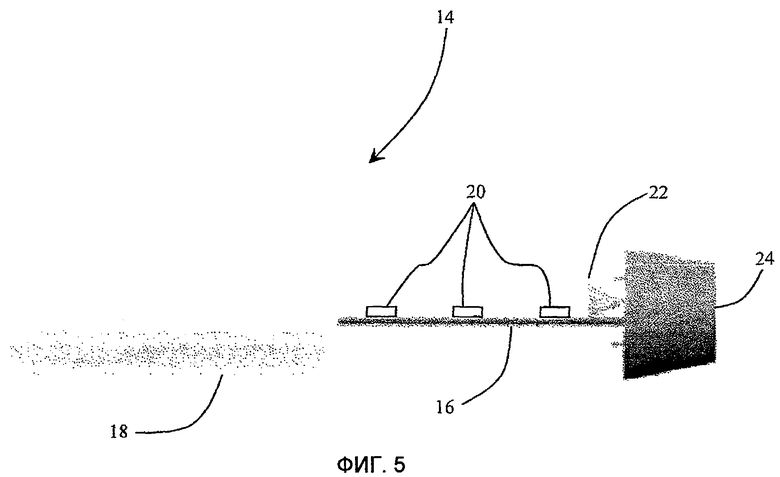
Фиг.5 - вид сбоку капсулы для визуализации животного;
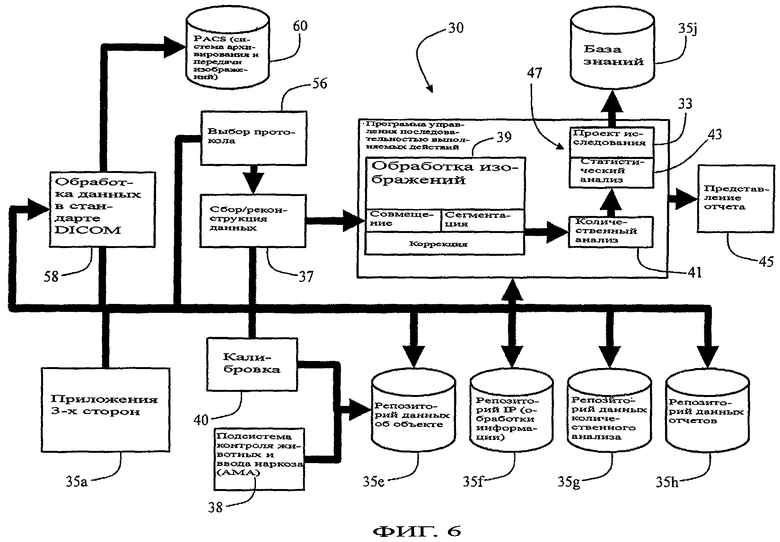
Фиг.6 - изображение подсистем исследовательской рабочей станции, имеющихся в распоряжении пользователя;
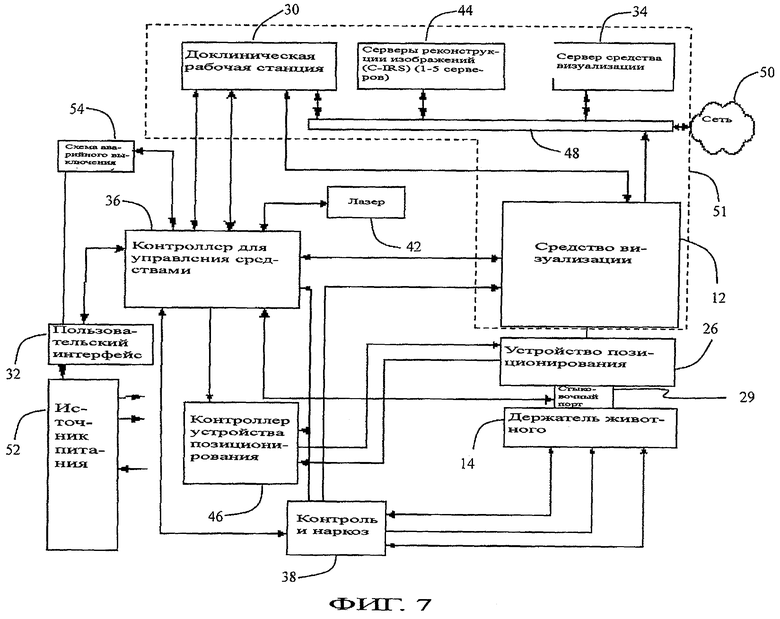
Фиг.7 - блок-схема, которая поясняет взаимосвязь между компонентами системы, показанной на фиг.2.
На фиг.1 показана примерная среда систем визуализации, применяемых для таких видов деятельности, как диагностика, терапия и/или исследования.
На фиг.2 представлена примерная система 10 визуализации, ранее показанная на фиг.1. На фигуре представлены дополнительные компоненты для визуализации мелких животных. Настоящая заявка рассматривает систему с модулями для позитронной эмиссионной томографии (PET), компьютерной томографии (СТ), однофотонной эмиссионной компьютерной томографии (SPECT), подготовки животного, исследовательской рабочей станцией с возможностями визуализации, совмещения, слияния и анализа изображений и другой визуализации и обработки данных. Различные модули объединяются в крышке, которая обеспечивает гибкие конфигурации с различными комбинациями параллельных, встречно-параллельных, распределенных и/или линейных конфигураций, определяемых вопросами пространства и производительности. Предусмотрены также общее устройство позиционирования объекта, а также держатель животного, который можно стыковать и расстыковывать с устройством позиционирования: В параллельной конфигурации, показанной на фиг.2, точное совмещение изображений обеспечивается конструктивной особенностью стыковки, которая обеспечивает точность и повторяемость установки, когда держатель животного стыкуют и отстыковывают. Дополнительное совмещение изображений можно получать с помощью опорных меток.
Как показано на фиг.5 и ранее на фиг.2, средство 12 визуализации отвечает за сбор данных для визуализации. Как упоминалось выше, средство 12 визуализации может быть любым средством визуализации, включая, но без ограничения, по меньшей мере, одно из PET (позитронного эмиссионного томографа), SPECT (однофотонного эмиссионного компьютерного томографа), СТ (компьютерного томографа) и MRI (магниторезонансного томографа). Капсула 14 с животным вмещает, по меньшей мере, одно животное во время сеансов визуализации. Капсула 14 обычно содержит, по меньшей мере, один держатель или одно ложе 16, цилиндрическую крышку 18, датчики 20 физиологических параметров, средства 22 обеспечения наркоза, например, носовой конус, в который входит нос животного, и стыковочный интерфейс 24 со стороны держателя. В альтернативном варианте крышка 18 может содержать мягкий резервуар, который можно откачивать для прилегания к объекту. Стыковочный интерфейс 24 предпочтительно конструктивно выполнен таким образом, чтобы усилие вставки/скручивания, когда держатель вставляют в средство 12 визуализации, было минимальным. В предпочтительном варианте положение животного не нарушается, когда животное переносят из одного средства в другое. Благодаря оборудованию всех средств и установочных блоков одинаковым стыковочным интерфейсом 24, манипулятор может перемещать держатель между разными средствами и установочными блоками. Функции стыковочного интерфейса включают в себя обеспечение контрольного, нагревательного и наркозного интерфейса для сопряжения с манипулятором и обеспечение опоры для вплоть до четырех животных. По причинам безопасности, клапаны для наркоза могут автоматически закрываться, когда капсулу 14 отделяют, и могут повторно открываться, когда ее присоединяют. Капсулы предпочтительно конструктивно выполнены с возможностью выдерживания множества очисток и стерилизаций, например спиртом, паром, радиацией и т.п.
Капсула 14 для одного животного может поддерживать несколько разных конфигураций ложа 16. Одна капсула 14 может вмещать до двух (2) лож 16 для крыс и, в качестве альтернативы, одна капсула 14 может вмещать большее число, например, четыре (4), лож 16 для мышей. Кроме узла крепления ложа каждый из интерфейсов 24 капсулы обеспечивает также, по меньшей мере, одну розетку, соединенную с измерительными датчиками 20, интерфейс для подведения текучих сред, например воздуха и анестетического средства и т.п. Ложи 16 могут быть либо профилированными ложами, либо плоскими поддонами. Для повышения эффективности нагревания предпочтительно применение отдельных и, насколько возможно, уменьшенных цилиндров 18 вокруг каждого из животных вместо одного большого цилиндра 18, покрывающего всех животных, хотя последний упомянутый вариант осуществления не является совсем непригодным. Цилиндры 18 предпочтительно являются легкосъемными. Обеспечены также отверстия, через которые можно вставлять или извлекать катетеры для инъекции изотопа и/или дополнительных измерений и физических взаимодействий.
Ложа типа плоского поддона позволяет специалистам, работающим с животными, выполнять нестандартные измерения или работать с нераспространенными животными или формами животных. Специалист может свободно помещать разных животных с разными размерами и массами. Носовой конус 22 на ложе 16 типа поддона предпочтительно является сменным для вмещения животных разных размеров. Носовой конус 22 предпочтительно является прозрачным для рентгеновского излучения и плотно покрывает голову животного. Кроме того, носовой конус 22 можно снимать, например, если применяют наркоз методом инъекции. Ложе 16 типа поддона оборудовано отверстиями с каждой стороны для ограничителей перемещения при установке.
В другом варианте осуществления ложе 16 является облегающим профилированным ложем. Профилированное ложе 16 предпочтительно имеет несколько типоразмеров, каждый выполненный с возможностью вмещения животных разных видов (крыс, мышей) и размеров (мелких, средних, крупных). Искривления ложа обеспечивают легкость и повторяемость расположения животных как с одним и тем же объектом при сканировании в разное время, так и с разными объектами. Ограничители перемещения встроены в ложе для предотвращения перекладки объекта во время или между сканированиями. Вместо традиционного обматывания лентой или разматывания ленты, предусмотрены также ограничители, сопряженные с ложем 16.
С ложем 16 предпочтительно сопряжены зонды-датчики 20 ЭКГ (электрокардиографии) и дыхания. В качестве альтернативы датчики могут быть прилажены к объекту вручную. Элементы SpO2 (определения насыщения кислородом) и нагревательные элементы также могут входить в состав ложа 16. Установочные метки на ложе (т.е. метки типа линейки) помогают воспроизводить положения во время укладки объектов на ложе 16. С учетом того, что, при визуализации мозга, желательно точное позиционирование, в конструкцию можно включить стереотаксическую рамку. Чтобы обеспечить доступ к объекту без нарушения расположения объекта, когда он зафиксирован на ложе 16, целесообразно оставлять доступными хвост, ноги и глаза животного в то время, когда животное фиксируют на ложе 16. Элементы, которые находятся в контакте с животными, желательно стерилизовать в автоклаве, поэтому такие компоненты предпочтительно устойчивы к очистке и дезинфекции высокотемпературным паром. Ложа можно независимо снимать для облегчения доступа к объектам в конфигурациях с несколькими животными. Для таких объектов, как крысы и мыши, предпочтительны нагреваемые держатели хвоста, так как они помогают предотвратить сжатие вен в хвосте в холодных окружающих условиях и изменение скоростей кровотока. В конструкцию можно включать впитывающие материалы, чтобы манипулировать с экскрементами во время сеансов визуализации; конструкция ложа может вмещать расходуемые материалы, или такие материалы можно встраивать в ложе 16. Ложе 16 может быть конструктивно выполнено со всеми зондами-датчиками или большинством требуемых зондов-датчиков, встроенных в ложе 16. В качестве альтернативы ложе может быть конструктивно выполнено со всеми зондами-датчиками, достаточно гибкими в месте, где они требуются оператору. Встроенные датчики полезны для стандартной визуализации, в частности, когда важна производительность. Внешние зонды-датчики можно применять, например, при исследованиях по комплексным сценариям, когда данный сценарий важно исполнять с максимальной точностью. Хотя модули подготовки визуализации животных предусмотрены и показаны в параллельной конфигурации, подготовка и визуализация животных могут осуществляться в отдельных помещениях.
Как также показано на фиг.2, система 10 содержит также устройство 26 позиционирования объекта, способное вмещать и пристыковывать капсулу 14. Устройство 26 позиционирования служит для оптимального позиционирования капсулы 14 с животным в области визуализации средства 12 визуализации (сканера) во время сеанса визуализации. Капсула 14 содержит идентификатор для обеспечения однозначного обозначения держателя для системы. Обозначение считывается, когда держатель подсоединяется к устройству 26 позиционирования объекта, например, обозначение в виде штрих-кода, который перемещается мимо считывающего устройства во время визуализации. На фиг.2 показаны только два модуля, однако предполагается, что в систему можно ввести несколько дополнительных модулей, по требованию, и насколько допускает пространство. Например, модуль PET может находиться рядом с модулем СТ. Или, так как время визуализации при визуализации методом PET обычно продолжительнее, то для повышения производительности можно обеспечить несколько модулей PET для каждого модуля СТ. Устройство 26 позиционирования может переносить капсулу 14 из одного модуля в следующий модуль, например, между сканированиями. Устройство 26 позиционирования может также содержать роликовые опоры для капсулы, способные вращать капсулу 14 вокруг ее продольной оси для различного ориентирования капсулы 14.
Модули могут располагаться бок о бок, параллельно, как показано на фиг.2, но, например, могут быть ориентированы последовательно, то есть один за другим, или радиально вокруг общей центральной точки, как показано на фиг.3. Другая возможная ориентация средств представляет собой систему поворотного гентри, показанную на фиг.4. В предпочтительном варианте модули средства 12 визуализации являются перемещаемыми, что позволяет заменять один модуль другим или изменять ориентацию, в зависимости от потребностей пользователя в данное время, но предусматривается также возможность применения постоянных или полупостоянных модулей с настенным креплением. Имеющиеся на рынке перемещаемые модули предпочтительно оборудованы стопорными или другими фиксирующими устройствами для предотвращения перемещения после того, как пользователь установил модули в требуемой конфигурации. Установочный блок 28 обеспечивает наркоз и контроль, когда капсула 14 с животным прикреплена в ожидании сканирования. Как показано, установочный блок может содержать место 31 хранения для хранения дополнительных цилиндров 18 под ложи 16 или других устройств, которые не используются в данный момент. Камера для вводного наркоза (не показанная) обеспечивает зону, в которую помещают находящееся в сознании животное, чтобы ему можно было дать наркоз до закрепления на ложе 16 для животного. Подобно средствам 12 визуализации, предпочтительно исполнение, в котором установочный блок является перемещаемым. При этом пользователь может перемещать установочный блок в положение рядом с любым средством 12 визуализации, с которым пользователю случается работать.
В варианте осуществления, показанном на фиг.2, система 10 содержит два модуля, а именно, модуль средства 12 визуализации и модуль подготовки животного, то есть, установочный блок 28. В предпочтительном варианте установочный блок 28 добавляет несколько функциональных аспектов. Данные аспекты содержат упомянутую выше камеру для вводного наркоза, в которой объекту дают наркоз, физическое рабочее место 27 для закрепления объекта на ложе и установки требуемых датчиков, стыковочные порты 29 для поддержания жизнеобеспечения и наркоза объекта между исследованиями и «бокс для пробуждения», который обеспечивает жизнедеятельность во время пробуждения объектов (не показанных). Предпочтительный способ пристыковки капсулы к вмещающей системе заключается в применении механизма принудительной блокировки, который зацепляется осевым усилием, прилагаемым исполнительным компонентом, находящимся в устройстве 26 позиционирования. И в данном случае, зацепление исполнительного компонента не должно требовать причинения беспокойства животному. Стыковочный интерфейс 24 на каждой капсуле 14 содержит выводы для сцепления с системой 38 контроля и наркоза животного (АМА), включая электрические и газовые соединения. Соединение для наркоза содержит функцию автоматического перекрытия при отсоединении» для предотвращения потерь наркозного средства в окружающую среду.
Рассмотрев вышеописанные аппаратуру и модули системы, перейдем к описанию типичного процесса последовательности выполняемых действий по визуализации объекта в виде мелкого животного. Во-первых, животное помещают в установку. В прошлом животных для использования в ходе исследования обычно требовалось умертвлять для проведения измерений ex vivo (на экс-живом организме), в результате чего снятые характеристики, по существу, замораживались в какой-то момент времени. В настоящей системе такие умертвления не требуются, поэтому одних и тех же животных можно визуализировать многократно в ходе исследования. Таким образом, животных обычно держат на месте исследования, но предполагается, что их можно привносить извне. Животное помещают в помещение для сканирования и вводят в наркозное состояние. Как упоминалось выше, данное действие выполняют методом предварительного наркоза в камере для вводного наркоза. После того как животное введено в состояние наркоза, животное располагают и фиксируют на ложе 16 для визуализации. В дополнение к позиционированию представляющей интерес области животного позиционирование животного содержит также надежное позиционирование головы животного в носовом конусе 22 для автоматического непрерывного подведения наркоза. При этом к животному присоединяют датчики 20. После того как животное расположено на ложе 16, животное покрывают крышкой 18, и капсулу 14 присоединяют к одному из стыковочных портов 29.
Затем пользователь калибрует 40 систему. Данное действие содержит как калибровку программного обеспечения, так и калибровку аппаратуры, например установку на нуль по осям X и Y. После того как сканер откалиброван, устройство 26 позиционирования переносит капсулу 14 от стыковочного порта 29 на модуле 28 подготовки к стыковочному порту 29 на средстве 12 визуализации. После того как капсула надлежащим образом установлена на сканирующем модуле, запускается сканирование. В ходе сканирования система 38 АМА контролирует факторы окружающей среды капсулы 14 и жизненные показатели объекта и непрерывно вводит наркоз в объект. Контроль объекта дает пользователю возможность исключать насколько возможно переменные физиологические параметры. Благодаря регулированию переменных физиологических параметров повышается достоверность плана исследования, так как можно будет легче воспроизводить результаты. В противном случае флуктуации переменных физиологических параметров могут навредить исследованию, тщательному в других отношениях, поэтому упомянутые переменные параметры желательно регулировать, насколько это возможно.
После того как сканирование закончено, животное извлекают из капсулы и помещают в посленаркозную камеру для пробуждения. В данном случае система 38 АМА контролирует температуру камеры. Когда животное приходит в сознание, его переносят обратно в его среду обитания. После этого сканограмму для визуализации можно обрабатывать и присоединять к общему клиническому исследованию пользователя.
Для облегчения организации исследования система содержит исследовательскую рабочую станцию 30. Рабочая станция 30 содержит компьютер, который управляет основными функциями системы и обеспечивает пользователю интерфейс для работы с данными изображений. Исследовательская рабочая станция 30 содержит блок управления сбором данных для обеспечения запуска, приостановки, возобновления и прекращения сбора изображения и представления информации о состоянии и ходе сбора данных. Кроме того, исследовательская рабочая станция 30 взаимодействует с системой 38 АМА, чтобы отображать жизненные показатели для нескольких животных, сканируемых в нескольких средствах, и стадии подготовки животного на рабочей станции. Кроме того, блок управления сбором данных и реконструирующий пользовательский интерфейс могут целиком или частично находиться в исследовательской рабочей станции 30. В исследовательской рабочей станции 30 содержится функция комбинирования, например, гибкого совмещения PET-СТ. В данной ситуации, взаимодействие с блоком управления получения СТ может осуществляться через исследовательскую рабочую станцию 30. В предпочтительном варианте исследовательская рабочая станция 30 обеспечивает путь переходов для всех приложений системы 10, чтобы применять общую платформу для инфраструктурных служб и эксплуатации. Естественно, исследовательская рабочая станция 30 допускает модернизацию по мере того, как появляются новые методы подготовки, методы, программное обеспечение, аппаратура и т.п. для сканирования.
Исследования, проводимые с научной целью, часто направляются гипотезами. Специалист или практикующий врач могут сформулировать идею и увлечься ей. Возможно, результаты одного исследования заставят специалистов задаться вопросами, которые иначе не появились бы. Другие исследования могут относиться не полностью к исследованию новых идей, а к поддержке обоснованности уже существующих гипотез. В каждом случае специалисту полезно располагать возможностью разработки и модификации исследований с визуализацией. Данная возможность включает в себя как разработку новых аспектов исследований, так и обращение к известным способам и методам для дополнения новых идей.
Как показано на фиг.6, исследовательская рабочая станция 30 содержит функции управления объектом и исследованием. Компонент управления исследованием взаимодействует с компонентом настройки протокола для описания протокола. Данное решение позволяет пользователю настраивать и редактировать параметры. Исследовательская рабочая станция 30 взаимодействует с контроллером 36 для управления средствами, чтобы обеспечивать информацию об активных исследованиях и активизации исследования. Исследование активизируется по запросу контроллера 36 для управления средствами. Исследовательская рабочая станция 30 взаимодействует также со средством 12 визуализации, чтобы передавать протокол в средство 12 визуализации и запускать, приостанавливать, прекращать или возобновлять сбор данных; станция получает обновленную информацию о ходе работы из средства 12 визуализации и после этого может представлять упомянутую информацию пользователю и передавать ее в контроллер 36 для управления средствами. Настройка протокола в исследовательской рабочей станции 30 предпочтительно допускает редактирование и ввод параметров протокола. Результирующий протокол сохраняется и привязывается к исследованию. Исследовательская рабочая станция 30 может также получать запросы на модификацию из контроллера 36 для управления средствами и представлять ему информацию о протоколе. Настройка протокола для исследования может осуществляться до момента активизации исследования в средстве 12.
В дополнение к проектированию исследования и управлению им исследовательская рабочая станция 30 обеспечивает визуальный пользовательский интерфейс 33 для проектирования исследования, предназначенный для оценки способов, этапов, количеств объектов исследования, статистического анализа, других результатов обработки данных и т.п. Это позволяет пользователю обеспечивать заданный уровень достоверности с учетом накопленных системных погрешностей и неточностей, а также задавать взаимосвязь между способами локальной визуализации и вычислений, например, извлечением информации из массивов данных и биоинформатикой. Исследовательская рабочая станция 30 позволяет пользователю графически настраивать комплексные процессы, с возможностью выбора последовательностей этапов для проведения исследования. Пользователь может проектировать исследования различных широко распространенных типов, от слабо структурированных поисковых исследований до более строгих и управляемых исследований.
Средства проектирования исследования работают путем предоставления пользователю возможности перетаскивать и опускать блоки, которые представляют различные средства импорта, сбора, обработки, количественной оценки, визуализации, анализа и отчетного представления данных на палитре, представляющей поток образов и данных в соответствии с их потребностями. Рабочая станция 30 обеспечивает библиотеку блоков, которые обеспечивают объединение известных и новых этапов. После того как блок отбуксирован на палитру, пользователь имеет возможность настроить свойства блока, которые конфигурируют его для конкретного исследования и учитывают заданные пользователем взаимосвязи, которые желательны. Вычислительные устройства для оценки системных погрешностей и уровней достоверности обеспечиваются системой, вместе со средствами для определения числа объектов или сеансов визуализации, необходимых для достижения прогнозируемой статистической значимости по отношению к гипотезе. Результаты, полученные в ходе исследований, настройки, данные индексирования документов, параметры настройки обработки данных, управления и дополнительные параметры настройки, все вышеперечисленное связано с обозначенным исследованием и может быть вызвано для использования в последующем. Таким образом, пользователь может просто осуществить на исследовательской рабочей станции 30 вызов исследования, которое уже проверено в работе, и адаптировать отдельные параметры или блоки для организации нового исследования, вместо описания нового исследования с самого начала.
Исследовательская рабочая станция 30 содержит также интерфейс или портал для извлечения информации из массивов данных биоинформационного проектирования. Соответствующий подэкран позволяет пользователю получать доступ к средствам 35а третьих сторон или к внутренним секретным информационным приложениям для вызова моделей 35b органов или моделей 35с заболеваний, к базам данных 35d населения, специальным данным 35е об объектах, данным 35f IP (обработки информации), данным 35d количественного анализа, отчетным данным 35h, биобанкам 35i, электронным историям болезни (EPR) 35j и другим базам 35k знаний. Вышеупомянутая информация может содержать редактируемые шаблоны, файлы STL, нормали, совокупности и т.п. Данный аспект обеспечивает место для коммерциализации исследовательских приложений по информатике, которые дополняют стандартную визуализацию. В данном случае, после того, как исследование создано и испытано, его можно ввести обратно в различные базы 35j для обращения в будущем.
Другой доступный пользователю проектный интерфейс или портал содержит варианты выбора, касающиеся сбора и реконструкции изображений 37. Исследовательская рабочая станция 30 служит для создания исследования, регистрации данных о животных и вызова последовательности выполняемых действий. Исследовательская рабочая станция 30 поддерживает последовательность выполняемых оператором действий во время визуализации протоколов, обеспечения управления сбором данных и состояния сбора данных и предоставления изображений для просмотра. Исследовательская рабочая станция 30 содержит подсоединенный крупноформатный высокоразрешающий дисплей. Данный дисплей управление чувствительными объектами и обеспечивает удобный доступ к большим объемам информации. Данные функции содержат выбор и модификацию протокола. Кроме того, пользователь располагает возможностью работать в формате формирования, передачи и хранения медицинских изображений (в стандарте DICOM) 58, а также других местных импортируемых форматах изображений. Данные калибровки и точности приборов могут переноситься в форме закрытых дескрипторов. Внешние данные, которые не содержат дескрипторов калибровки и точности приборов, можно вводить вручную по приглашению исследовательской рабочей станции 30. Затем данные могут быть выведены в систему архивирования и передачи изображений или PACS 60.
На интерфейсе 39 проектирования последовательности выполняемых действий по обработке изображений пользователь может выбрать любые из множества вариантов корректировки и повышения качества изображения после его получения. В одном варианте осуществления данный подэкран представляет собой графический пользовательский интерфейс для совмещения различных типов, формирования изображений поверхности и объема, сегментации с использованием моделей, визуализации, слияния и т.п. Кроме того, пользователь располагает возможностью выбора методов коррекции, например, частичной объемной коррекции и локальной коррекции движения. Данные могут быть представлены в виде преобразования с нескольких входов к нескольким выходам, включая отображаемые участки (например, изображение) и неотображаемые участки (например, поле деформации). Кроме того, подэкран обработки изображений является удобным местом для включения протоколов 56 продольного и группового исследования.
Исследовательская рабочая станция 30 содержит также интерфейс 41 проектирования количественного анализа. На данном интерфейсе пользователь может выбирать стандартизированный уровень накопления (SUV), фармакокинетику, инструментальные программы, относящиеся к системам и/или процессам заболевания конкретных органов, например программные пакеты для кардиологии, неврологии, онкологии, костной денситометрии, реваскуляризации, а также другие программные пакеты. Как правило, пользователь располагает возможностью выбирать существующие программные пакеты, которые уже проверены и часто применяются, а также программные пакеты, которые менее известны, но обещают стать широко применяемыми программными пакетами. Целесообразно также, чтобы пользователь располагал универсальной возможностью создавать программные пакеты, при необходимости. Какой-либо анализ относится, в общем, к области доклинической деятельности, поскольку во многих случаях, программные пакеты могут быть первыми версиями, которые будут, в конечном итоге, проверяться на надежность для клинического применения. При этом система помогает переносу возможности с моделей для животных на модели для человека.
На интерфейсе 43 проектирования последовательности выполняемых действий статистического анализа, пользователь может планировать и выполнять анализ исследования, проект которого ранее разработан. На упомянутом интерфейсе пользователь может, например, применять вычисления байесовской достоверности для оценки 47 гипотезы. Оценка 47 гипотезы содержит как проект 33 исследования, так и статистический анализ 43. Существует несколько сред для автоматизированной оценки в общеизвестных форматах исследования, в зависимости от того, что пользователь предполагает получить из данных. Данный подэкран содержит также доступ к статистическим вычислениям для специальных анализов, подходящих для данного случая, выполняемых после сканирования, и не ограничен предварительно разработанными исследованиями. При этом если пользователь предполагает, что в данных может быть скрыта какая-то тенденция или связь, то пользователь может разработать собственные анализы для изучения упомянутой тенденции или связи.
И, наконец, пользователь располагает несколькими вариантами, когда приходит к представлению отчетных данных. На интерфейсе 45 проектирования отчетов пользователь получает в распоряжение диаграммы, графики, сводки публикаций, стандартные отчеты FDA (Управления по контролю за продуктами и лекарствами США) и т.п. для составления отчета о своем исследовании. Разумеется, пользователь может также разработать специализированный способ отчетности, который пригоден для демонстрации текущего исследования. В предпочтительном варианте рабочая станция 30 содержит также функцию моделирования аппаратуры, которая позволяет пользователю проектировать ориентации и схемы расположения аппаратуры, которую пользователь имеет в распоряжении. Так как каждое исследовательское учреждение будет иметь разные возможности и ограничения (по финансированию, физическому пространству и т.д.), то каждое учреждение будет располагать разной доступной в нем аппаратурой. Пользователь может сообщить системе, какая аппаратура имеется в его распоряжении, и затем проектировать схему расположения, чтобы поддерживать последовательность выполняемых действий и обработку объекта. При наличии перемещаемых модульных средств пользователь располагает возможностью гибкой компоновки средств, чтобы оптимизировать выполнение проверки своей гипотезы. Система может также учитывать схему расположения аппаратуры, при оценке исследования, например, при выявлении потенциальных «узких мест», проблем со слишком длительным выдерживанием объектов под наркозом и т.п.
Элементы системы и их взаимосвязь между собой показаны на фиг.7. Подсистема средства 12 визуализации содержит детектор и электронику, подходящую для конкретной системы, будь то PET, SPECT, СТ, MRI, другое средство визуализации или их комбинация. Локальный пользовательский интерфейс 32 обеспечивает пользователю локальный доступ для ввода команд и считывания состояний и данных, касающихся устройства 26 позиционирования объекта, системы 38 контроля животных и ввода им наркоза и элементов управления установкой визуализации для запуска или прекращения последовательности сбора данных. Локальный пользовательский интерфейс, представленный на фиг.2, представляет собой сенсорный экран, но может быть также универсальной съемной панелью управления, которая может взаимодействовать с несколькими разными средствами. В случае с средствами 12 визуализации, ориентированными один около другого, интерфейс 32 может быть смонтирован на подвижной платформе, которая перемещается по направляющей дорожке вдоль линии модулей, и поэтому интерфейс 32 может находиться в любом месте, где пользователь должен выполнять работу в определенное время. В еще одном альтернативном варианте осуществления интерфейс 32 может быть беспроводным устройством, например переносным PC (персональным компьютером), PDA (персональным электронным секретарем) или другим беспроводным устройством, которое способно поддерживать беспроводную связь с системой 10.
Сервер 34 обрабатывает данные, собранные средством 12 визуализации, а также обеспечивает управление, реконструирующую обработку и поддержку программных интерфейсов связи с системой сбора данных. Контроллер 36 для управления средствами управляет локальными функциями средства и следит за исследованиями, заданными средству. Упомянутые функции содержат подсистему 38 АМА, устройство 26 позиционирования, стыковочные порты 29, пользовательский интерфейс 32 и котировочный лазер 42. Контроллер 36 обеспечивает также ввод с интерфейса 32 средства 12 в компьютер 30 исследовательской рабочей станции. Контроллер 36 обеспечивает возможность выбора исследования, когда присоединена капсула 14. Контроллер вызывает информацию о протоколе для выбранного исследования и допускает доработку выбранного исследования. Когда на сенсорном экране 32 выбран экран сбора данных, контроллер активизирует исследование на исследовательской рабочей станции 30, что приводит к загрузке протокола в средство 12 визуализации исследовательской рабочей станцией 30.
Подсистема 38 АМА осуществляет контроль жизненных показателей (температуры, частоты пульса, артериального давления, ЭКГ и т.д.), ввод наркоза и удаление отработанного газа, и регулирование температуры объекта или объектов. Подсистема 38 АМА физически соединена с капсулой 14 с животным проводами к контрольным зондам-датчикам 20, нагревателю для регулирования температуры и трубкам для прокачки наркозного и отработанного газа.
Реконструирующий процессор 44 служит вычислительным ресурсом для реконструкции. Реконструирующий процессор 44 соединен с сервером 34 сетевым соединением, например вторым сетевым соединением на основе тонкого коаксиального кабеля, которое поддерживает обработку исходных данных, управление реконструкцией и управление передачей изображений. В систему 10 можно ввести дополнительные средства и, в данном случае, реконструирующий процессор 44 может также решать задачи формирования изображений от упомянутых дополнительных средств. В таком случае реконструирующий процессор 44 получает исходные данные изображений по собственному каналу высокоскоростной последовательной передачи данных. Реконструирующий процессор 44 подсоединен к серверу 34 с использованием 1-гигабитового сетевого соединения на основе тонкого коаксиального кабеля, например, которое, в свою очередь, поддерживает высокоуровневый программный интерфейс для протоколов реконструкции СТ и передачи изображений. Сервер 34 использует также данный интерфейс для обеспечения управления реконструкцией при посредстве программного интерфейса связи с блоком 44 реконструирующего процессора. В предпочтительном варианте реконструирующий процессор 44 содержит пять серверов, но их число может быть больше или меньше, в зависимости от потребностей задач обработки. Исследовательская рабочая станция 30 содержит инструментальные программы, описанные в настоящей заявке, и подходящее быстродействующее программное обеспечение в конфигурации для создания прототипов.
Подсистема 46 управления устройством позиционирования сопрягается с контроллером 36 для управления средствами, например, посредством соединения по сети Ethernet. По данному соединению выдаются команды на перемещение, и обратно возвращается информация о состоянии и положении. Подсистема 46 управления устройством позиционирования отвечает за управление положением устройства 26 позиционирования объекта. Перемещение устройства 26 позиционирования выполняется контроллером 36 для управления средствами и контроллером 46 позиционирования. Контроллер 36 для управления средствами реализует интерфейсы, которые выполняют выбранные перемещения ложа. Контроллер 46 устройства позиционирования превращает упомянутые перемещения в команды на сервопривод. Высокоскоростной маршрутизатор 48 соединяет исследовательскую рабочую станцию 30, реконструирующий процессор 44 и сервер 34 со средством 12 визуализации. Маршрутизатор 48 предпочтительно является 1-гигабайтовым интеллектуальным маршрутизатором, который допускает развязку подсети(ей) сбора данных с учрежденческой или внешней сетью 50. Средство 12 визуализации, исследовательская рабочая станция 30, сервер 34, реконструирующий процессор 44 и маршрутизатор 48 можно рассматривать, в совокупности, как подсеть 51 сбора данных. Подсеть 51 сбора данных логически связывает блок управления сбором данных (расположенный внутри данного средства), сервер 34, исследовательскую рабочую станцию 30 и реконструирующий процессор 44. Данный интерфейс передает команды управления сбором данных из исследовательской рабочей станции 30 в средство 12 визуализации и сервер, позволяет исследовательской рабочей станции 30 запрашивать перемещение устройства 26 позиционирования объекта и обеспечивает маршрут, по которому исходные данные для визуализации передаются из средства 12 визуализации в сервер 34 и реконструирующий процессор 44. Интеллектуальный процессор 48 служит для развязки данного логического соединения. Соединение с исследовательской рабочей станцией 30 поддерживает также передачу минимально обработанных изображений в серверную платформу 34 и во внешние устройства 50 (т.е. учрежденческую сеть).
Подсистема 52 блока питания обеспечивает различные АС (переменные) и DC (постоянные) напряжения в компоненты. Схема 54 аварийного отключения (Е-выключения) выключает электропитание, когда происходит обрыв цепей. Когда схема 54 Е-выключения активизируется, источник питания будет переключаться в безопасный режим, например, возможно отключение высокого напряжения и мощности управления перемещением, тогда как вычислительные элементы могут оставаться действующими. Контроллер 36 для управления средствами способен считывать состояние и управлять им. Предполагается, что конфигурацию системы 52 блока питания можно настраивать при изготовлении для работы от сети 120 В или 23 0 В переменного тока. Кроме того, блок питания будет содержать модуль адаптера питания. Данный модуль будет выдавать 230 В, чтобы питать модули, которые нуждаются в более высоких напряжениях, например реконструирующий процессор 44.
Модуль 29 стыковочного интерфейса отвечает за обеспечение точной стыковки капсулы 14 с животным с устройством 26 позиционирования. Кроме того, модуль 29 отвечает за образование надежных электрических и пневматических соединений. Стыковочный интерфейс может быть оборудован электрическим управлением при посредстве исполнительного компонента. Как правило, средство 12 визуализации и установочный блок 28 заключены в корпус, который предпочтительно минимизирует вес и максимально усиливает жесткость системы. Кроме того, корпус должен быть, по существу, прозрачен для излучения и, следовательно, корпус может охватывать туннель устройства визуализации. Примером материала корпуса является стеклопластик. В предпочтительном варианте содержится сенсорный экран 32 или другой локальный пользовательский интерфейс для управления устройством 26 позиционирования, отображения данных АМА и поддержки позиционирования объекта. Контроллер 46 устройства позиционирования получает команды на перемещение от сенсорного экрана 32 через посредство программного обеспечения, работающего также в контроллере 36 для управления средством, чтобы выполнять перемещение ложа. Сенсорный экран 32 обеспечивает часть интерфейсов человек-средство. Программное обеспечение для сенсорного экрана 32 работает в контроллере 36 для управления средством и взаимодействует с системой 38 контроля и наркоза животного (АМА), компонентами управления перемещением и информации о сборе данных, также во время работы в контроллере 36 для управления средством. Положение локального пользовательского интерфейса 32 определяется функциональными соображениями, например предметами, обычно находящимися внутри или около туннеля устройства во время визуализации и т.п. В предпочтительном варианте корпус оборудован выключателями крышки, включенными в состав схемы Е-выключения, для отключения питания в случае открывания крышки.
Выше изобретение описано со ссылкой на предпочтительные варианты осуществления. После прочтения и тщательного изучения вышеприведенного описания специалисты смогут разработать модификации и изменения. Предполагается, что изобретение следует толковать как включающее в себя все упомянутые модификации и изменения, насколько они находятся в пределах объема притязаний прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к медицинской технике. Система визуализации in-vivo содержит капсулу с животным, которая включает в себя один или более держателей или ложе, цилиндрическую крышку, датчики физиологических параметров, идентификатор и стыковочный интерфейс, который обеспечивает контроль, нагрев и наркоз для одного или более животного. Система содержит одно первое средство визуализации для сбора in-vivo данных животных в области визуализации первого средства визуализации, которое включает в себя стыковочный порт и считывающее устройство. Система содержит реконструирующий процессор, который реконструирует представляемое изображение из in-vivo данных для визуализации, установочный блок или модуль подготовки, который включает в себя стыковочный порт. Система содержит исследовательскую рабочую станцию, которая включает в себя электронный интерфейс для взаимодействия с первым средством визуализации, пользовательский интерфейс который предоставляет пользователю возможность проектирования нового исследования и модификации существующего исследования. Система содержит устройство отображения, которое отображает жизненные показатели животных во время визуализации и подготовки, и систему контроля и наркоза животного для контроля жизненных сигналов животных в период воздействия седативным средством и для обеспечения регулируемого ввода наркоза в объект через посредство нескольких стыковочных интерфейсов. Применение изобретения позволит оценить несколько биологических параметров сразу в течение одной процедуры визуализации. 12 з.п. ф-лы, 7 ил.
1. Система визуализации in vivo, содержащая:
капсулу (14) с животным, которая вмещает, по меньшей мере, одно животное и включает в себя:
один или более держателей или ложе 16;
цилиндрическую крышку (18);
датчики (20) физиологических параметров;
идентификатор, который обеспечивает однозначное обозначение; и
стыковочный интерфейс (24), который обеспечивает контроль, нагрев и наркоз для одного или более животного;
по меньшей мере, одно первое средство (12) визуализации для сбора in vivo данных одного или более животных в области визуализации первого средства (12) визуализации и включает в себя:
стыковочный порт (29), который стыкует капсулу (14) с животным; и
считывающее устройство, которое считывает обозначение во время визуализации;
реконструирующий процессор (34), который реконструирует представляемое изображение из in vivo данных для визуализации;
установочный блок или модуль подготовки (28), который включает в себя:
стыковочный порт (29), который стыкует капсулу (14) с животным; и
исследовательскую рабочую станцию (30), которая включает в себя:
электронный интерфейс для взаимодействия с первым средством (12) визуализации,
пользовательский интерфейс для проектирования исследования, который предоставляет пользователю возможность выполнять одно из проектирования нового исследования и модификации существующего исследования;
устройство отображения, которое отображает жизненные показатели одного или более животных во время визуализации и подготовки; и
по меньшей мере, одну систему (38) контроля и наркоза животного для контроля жизненных сигналов одного или более животных в период воздействия седативным средством и для обеспечения регулируемого ввода в наркоз одного или более животных через посредство нескольких стыковочных интерфейсов (29).
2. Система визуализации in vivo по п.1, дополнительно содержащая:
по меньшей мере, второе средство (12) визуализации, которое является перемещаемым относительно, по меньшей мере, одного первого средства (12), при этом второе средство (12) визуализации является устанавливаемым пользователем, чтобы способствовать реализации потребности пользователя в проверке гипотезы, включающее стыковочный интерфейс (29) и подсоединяемое к исследовательской рабочей станции (30).
3. Система визуализации in vivo по п.1, в которой
пользовательский интерфейс для проектирования исследования предоставляет пользователю возможность задавать взаимосвязь между способами визуализации и вычислений.
4. Система визуализации in vivo по п.1, в которой пользовательский интерфейс для проектирования исследования предоставляет пользователю возможность сохранять, по меньшей мере, результаты, параметры настройки, настройки индексирования документов, параметры настройки обработки данных, параметры настройки управления и дополнительные параметры настройки.
5. Система визуализации in vivo по п.1, дополнительно содержащая:
пользовательский интерфейс для извлечения информации из массивов данных, посредством которого пользователь решает задачи извлечения информации из массивов данных, связанные со спроектированным или модифицированным исследованием.
6. Система визуализации in vivo по п.1, дополнительно содержащая: пользовательский интерфейс для количественного анализа, который предоставляет пользователю возможность повторно вызывать существующие программные пакеты для клинических исследований и допускает доступ пользователя, по меньшей мере, к одному из инструментальной программы для определения стандартизированного уровня накопления (SUV), фармакокинетической инструментальной программы, кардиологической инструментальной программы, неврологической инструментальной программы, онкологической инструментальной программы, инструментальной программы костной денситометрии и инструментальной программы реваскуляризации.
7. Система визуализации in vivo по п.1, дополнительно содержащая: пользовательский интерфейс для статистического анализа, который под управлением пользователя выполняет, по меньшей мере, одно из следующего:
анализирует ранее разработанный проект исследования;
использует вычисления байесовской достоверности для оценки гипотезы;
автоматически получает результаты анализов общих исследований;
анализирует совокупность из крупного массива данных и
выполняет анализ, подходящий для данного конкретного случая, после исследования.
8. Система визуализации in vivo по п.7, дополнительно содержащая пользовательский интерфейс для составления отчетов, который предоставляет пользователю возможность индивидуально настраивать способ представления отчетных данных для представления отчета о статистическом анализе исследований.
9. Система визуализации in vivo по п.1, дополнительно содержащая пользовательский интерфейс для управления наркозом, допускающий управление пользователем для регулирования наркозного обеспечения через посредство, по меньшей мере, одного из подготовительной ячейки (28) и первого средства (12) визуализации.
10. Система визуализации in vivo по п.1, дополнительно содержащая: устройство (26) позиционирования, которое оптимально позиционирует капсулу (14) с животным в области визуализации первого средства (12) визуализации во время сеанса визуализации.
11. Система визуализации in vivo по п.10, в котором капсула (14) с животным является стыкуемой с, по меньшей мере, одним из нескольких стыковочных интерфейсов (29), расположенных в подготовительной ячейке (28) и, по меньшей мере, одном первом средстве (12) визуализации.
12. Система визуализации in vivo по п.1, дополнительно содержащая сенсорный экран (32), расположенный на первом средстве (12) визуализации, посредством которого пользователь взаимодействует с исследовательской рабочей станцией (30).
13. Система визуализации in vivo по п.12, дополнительно содержащая:
контроллер (36) для управления средством, который управляет локальными функциями средства, следит за исследованиями, заданными средству, и обеспечивает возможность ввода данных посредством сенсорного экрана (32) первого средства (12) визуализации в исследовательскую рабочую станцию (30).
| US 6574304 В1, 03.06.2003 | |||
| WO 2006020896, 23.02.2006 | |||
| УСИЛЕНИЕ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА (ЯМР) И МАГНИТОРЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ (МРВ) В ПРИСУТСТВИИ ГИПЕРПОЛЯРИЗОВАННЫХ БЛАГОРОДНЫХ ГАЗОВ | 1997 |
|
RU2186405C2 |
| US 2003092980 А1, 15.05.2003 | |||
| US 6458081 B1, 01.10.2002 | |||
| ГОНСАЛЕС Р | |||
| и др | |||
| Цифровая обработка изображений | |||
| - М.: ТЕХНОСФЕРА, 2005 | |||
| ГАБУНИЯ Р.И | |||
| и др | |||
| Компьютерная томография в клинической диагностике | |||
| - М.: МЕДИЦИНА, 1995 | |||
| ЛИНДЕНБРАТЕН Л.Д | |||
| и др | |||
| Медицинская радиология | |||
| - М.: МЕДИЦИНА, 2000. | |||

