ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к магниторезонансной томографии, в частности к регистрации графических объектов на магнитно-резонансном изображении.
УРОВЕНЬ ТЕХНИКИ
При высокоинтенсивном фокусированном ультразвуковом исследовании (HIFU) изучаемый объем обнаруживается на этапах планирования и может быть маркирован на медицинских изображениях, таких как магнитно-резонансные изображения. Например, фиброма матки может быть быстро оконтурена посредством эллипсоида. Объемы, подлежащие разрушению, так называемые клетки, подлежащие терапии, могут быть запланированы заранее и могут служить опознавательной точкой для сосудов или других структур, подлежащих разрушению. Изучаемые области могут быть очерчены, чтобы выделить подверженные риску органы и широту безопасного терапевтического диапазона для структур органов. При выполнении ультразвуковых исследований на изображения накладывается полученная карта температур, и тепловые дозы соответствуют изменению сигналов на изображениях в местах, где ткань была изменена воздействием тепловой энергии. Наложенные карты составляют основные графические объекты HIFU. В международной заявке WO 2010/113050 предлагается очерчивание анатомических особенностей на изображениях, используемых для планирования лечения на базе изображений. При этом известном очерчивании используется сравнение положения анатомических ориентиров на изображении с опорными ориентирами.
Однако изучаемые объекты могут двигаться сами, и/или движение может происходить внутри объекта во время ультразвукового исследования. Алгоритмы автоматической регистрации подвержены ошибкам, когда входные данные изображения не обеспечивают достаточного/правильного контраста или отношения сигнал/шум. Ручные способы на базе ориентиров требуют обширного вмешательства пользователя для определения подходящих анатомических ориентиров и замедляют ход терапии. В кратком обзоре трудов Международного общества по магнитному резонансу в медицине ISMRM Proc. ISMRM(2009)443 упоминается, что 2D селективный навигатор используется для компенсации движения вне плоскости.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении в независимых пунктах формулы предлагается медицинское устройство, компьютерный программный продукт и способ управления медицинским устройством. Варианты осуществления приведены в зависимых пунктах формулы.
Термин «машиночитаемый носитель информации», используемый в настоящем документе, охватывает любые материальные носители информации, которые могут хранить команды, которые исполняются процессором вычислительного устройства. Машиночитаемый носитель информации может называться постоянным машиночитаемым носителем информации. Машиночитаемый носитель информации также называться материальным машиночитаемым носителем. В некоторых вариантах осуществления машиночитаемый носитель информации также может хранить данные, доступ к которым возможен с помощью процессора вычислительного устройства. Примеры машиночитаемых носителей информации включают в себя, не ограничиваясь: гибкий диск, магнитный накопитель на жестком диске, твердотельный жесткий диск, флэш-память, USB-флэш-память, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R диски. Термин «машиночитаемый носитель информации» также относится к различным типам носителей информации, доступ к которым осуществляется вычислительным устройством через сеть или канал связи. Например, данные могут быть вызваны по модему, по сети internet или по локальной сети.
«Память вычислительной машины» или «память» является примером машиночитаемого носителя информации. Памятью вычислительной машины является любая память, доступ к которой напрямую осуществляется процессором. Примеры памяти вычислительной машины включают в себя, не ограничиваясь: память RAM, регистры и регистровые файлы.
«Запоминающее устройство вычислительной машины» или «запоминающее устройство» является примером машиночитаемого носителя информации. Запоминающим устройством вычислительной машины является любой энергонезависимый машиночитаемый носитель информации. Примеры запоминающего устройства вычислительной машины включают в себя, не ограничиваясь: накопитель на жестком диске, USB-флэш-память, гибкий диск, интеллектуальная плата, DVD, CD-ROM и твердотельный жесткий диск. В некоторых вариантах осуществления запоминающим устройством вычислительной машины также может быть память вычислительной машины или наоборот.
Термин «процессор», используемый в настоящем документе, охватывает электронный компонент, способный исполнять программу или исполняемую машиной команду. Упоминания вычислительного устройства, включающие в себя слово «процессор», следует интерпретировать, как возможно охватывающие более одного процессора или ядра для обработки данных. Процессор может представлять собой, например, многоядерный процессор. Термин «процессор» также может относиться к группе процессоров в пределах одной вычислительной системы или распределенных между множеством вычислительных систем. Термин «вычислительное устройство» также следует интерпретировать, как возможно относящийся к группе или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Многие программы содержат команды, выполняемые множеством процессоров, которые могут находиться в пределах одного вычислительного устройства или которые могут быть равномерно распределены между множеством вычислительных устройств.
Термин «пользовательский интерфейс», используемый в настоящем документе, относится к интерфейсу, который позволяет пользователю или оператору взаимодействовать с компьютером или вычислительной системой. «Пользовательский интерфейс» также может называться «человеко-машинным интерфейсом». Пользовательский интерфейс может обеспечивать информацию или данные для оператора и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать ввод от оператора для приема компьютером и может обеспечивать вывод для пользователя от компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и интерфейс может позволять компьютеру указывать результат управления или манипулирования оператором. Устройство отображения данных или информация на устройстве отображения или графический пользовательский интерфейс является примером предоставления информации оператору. Прием данных посредством клавиатуры, мыши, трекбола, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, геймпада, веб-камеры, наушников, рычагов переключения, управляемого колеса, педалей, перчатки для компьютерных игр, танцевального коврика, удаленного управления и акселерометра, которые являются примерами компонентов пользовательских интерфейсов, позволяет принимать информацию или данные от оператора.
Термин «аппаратный интерфейс», используемый в настоящем документе, охватывает интерфейс, позволяющий процессору вычислительной системы взаимодействовать с и/или управлять внешним вычислительным устройством и/или машиной. Аппаратный интерфейс может позволять процессору пересылать управляющие сигналы или команды на внешнее вычислительное устройство и/или машину. Аппаратный интерфейс также может позволять процессору обмениваться данными с внешним вычислительным устройством и/или машиной. Примеры аппаратного интерфейса включают в себя, не ограничиваясь: универсальную последовательную шину, IEEE 1394 порт, параллельный порт, IEEE 1284 порт, последовательный порт, RS-232 порт, IEEE-488 порт, соединение Bluetooth, соединение по беспроводной локальной сети, TCP/IP соединение, Ethernet соединение, интерфейс управляющего напряжения MIDI интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
Термин «дисплей» или «устройство отображения», используемый в настоящем документе, охватывает устройство вывода или пользовательский интерфейс, предназначенный для отображения изображений или данных. Устройство отображения может обеспечивать вывод визуальных, звуковых и/или предназначенных для тактильного восприятия данных. Примеры устройства отображения включают в себя, не ограничиваясь: монитор компьютера, экран телевизора, сенсорный экран, предназначенное для тактильного восприятия устройство отображения, экран Брайля, трубку с регенерацией изображения (CRT), запоминающую трубку, дисплей с бистабильной схемой, электронный документ, векторный дисплей, плоский дисплей, вакуумный флуоресцентный дисплей (VF), светодиодные (LED) дисплеи, электролюминесцентный дисплей (ELD), плазменные дисплеи (PDP), жидкокристаллические дисплеи (LCD), дисплеи на органических светодиодах (OLED), проектор и виртуальный шлем.
Термин «магнитно-резонансные (МР) данные» определяются в настоящем документе как записанные измерения РЧ-сигналов, испускаемых атомными спинами, антенны магнитно-резонансного томографа во время скана при магнитно-резонансной визуализации. Термин «изображение магнитно-резонансной визуализации» определяется в настоящем документе как реконструированная двух- или трехмерная визуализация анатомических данных, включенных в данные магнитно-резонансной визуализации. Эта визуализация может быть выполнена компьютером.
Термин «ультразвуковое окно», используемый в настоящем документе, охватывает окно, которое передает ультразвуковые волны или энергию. Обычно в качестве ультразвукового окна используется тонкая пленка или мембрана. Ультразвуковое окно может быть изготовлено, например, в виде тонкой мембраны из BoPET (биаксиально-ориентированный полиэтилентерэфталат).
В одном аспекте настоящего изобретения предлагается медицинское устройство, содержащее систему магнитно-резонансной визуализации для получения данных магнитно-резонансной визуализации в зоне формирования изображений. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Медицинское устройство дополнительно содержит память, содержащую машиночитаемые команды для исполнения процессором. Исполнение команд побуждает процессор получать первые магнитно-резонансные данные с помощью системы магнитно-резонансной визуализации. Первые магнитно-резонансные данные представляют собой данные магнитно-резонансного исследования. Исполнение команд дополнительно побуждает процессор реконструировать первое магнитно-резонансное изображение с помощью первых данных магнитно-резонансной визуализации. Первое магнитно-резонансное изображение представляет собой магнитно-резонансное изображение.
Термин «магнитно-резонансное изображение», используемый в настоящем документе, охватывает данные, которые можно использовать для воспроизведения или отображения изображения на устройстве отображения. Например, магнитно-резонансное изображение может содержать данные, которые представляют собой срез, одиночный воксель или даже трехмерный объем. Исполнение команд дополнительно побуждает процессор принимать регистрацию одного или более графических объектов для первого магнитно-резонансного изображения. Регистрация определяет пространственное положение одного или более графических объектов по отношению к первому магнитно-резонансному изображению. Исполнение команд дополнительно побуждает процессор повторно получать вторые данные магнитно-резонансной визуализации с помощью системы магнитно-резонансной визуализации.
Вторые магнитно-резонансные данные представляют собой магнитно-резонансные данные. Исполнение команд дополнительно побуждает процессор повторно реконструировать второе магнитно-резонансное изображение с использованием вторых магнитно-резонансных данных. Второе магнитно-резонансное изображение также является магнитно-резонансным изображением. Исполнение команд дополнительно побуждает процессор принимать координаты позиционирования на втором магнитно-резонансном изображении для первой группы, выбранной среди одного или более графических объектов. Координаты повторного позиционирования описывают первую группу на втором магнитно-резонансном изображении по отношению к первому магнитно-резонансному изображению. Другими словами, определяется положение одного или более графических объектов на первом магнитно-резонансном изображении.
При реконструкции второго магнитно-резонансного изображения один или более графических объектов могут быть неправильно зарегистрированы на втором магнитно-резонансном изображении. Координаты повторного позиционирования описывают новое положение первой группы из одного или более графических объектов. Первая группа может содержать, например, один или более из одного или более графических объектов. Исполнение команд дополнительно побуждает процессор повторно определять преобразование координат второй группы, выбранной среди одного или более графических объектов, путем применения модели преобразования координат к координатам повторного позиционирования. Сущность настоящего изобретения состоит в том, что в плане лечения, сформированном по первому магнитно-резонансному изображению, содержатся подходящие графические объекты, которые могут быть использованы для установления движения. Графические объекты в плане лечения сами по себе могут, например, быть очерчены на первом магнитно-резонансном изображении посредством способа, предложенного в международной заявке WO 2010/113050. Однако этот известный способ ограничивается его применением для автоматического очерчивания анатомического органа при планировании лечения на базе изображений. То есть известный способ применим только при первоначальном создании плана лечения. Настоящее изобретение основано на признании сущности того, что одни и те же графические объекты могут быть использованы для обнаружения движения и, соответственно, корректировки плана лечения. При совмещении соответствующих графических объектов на первом магнитно-резонансном изображении относительно графических объектов на втором магнитно-резонансном изображении обеспечивается преобразование координат, которое представляет движение, осуществленное между первым магнитно-резонансным изображением, которое составляет основу плана лечения, и последующим вторым магнитно-резонансным изображением. Это преобразование координат затем используется для модификации или обновления плана лечения с целью учета осуществленного движения. Высокоинтенсивная фокусированная ультразвуковая система продолжает использоваться с управлением на основе модифицированного плана лечения. Например, регулируемый фокус перемещается таким образом, чтобы осуществлялся учет движения. Таким образом, даже если происходит движение, высокоинтенсивное фокусированное ультразвуковое излучение остается сфокусированным в целевой зоне, которая будет подвергнута воздействию, и можно избежать выделения энергии вокруг здоровой ткани. Таким образом, перегревание будет точно применено к ткани в целевой области, даже если происходит движение. Поскольку используются графические объекты, включенные в план лечения, нет необходимости отдельно выбирать графические объекты. А именно, графические объекты в плане лечения представляют имеющиеся анатомические структуры, движение которых должно быть учтено при обновлении плана лечения.
Этот вариант осуществления может быть предпочтительным, поскольку он обеспечивает средство правильного позиционирования множества графических объектов на втором магнитно-резонансном изображении. Один или более из множества графических объектов сначала позиционируются повторно, а затем используется модель преобразования координат для повторного позиционирования одного или более из оставшихся множества графических объектов на основе выполнения способа первого повторного позиционирования. Это может обеспечивать средство повторного позиционирования множества графических объектов на втором магнитно-резонансном изображении, например, когда объект движется. Например, для пациента могут быть получены первые и вторые магнитно-резонансные данные.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор принимать план лечения для управления высокоинтенсивной фокусированной ультразвуковой системой с регулируемым фокусом. Термин «план лечения», используемый в настоящем документе, охватывает команды или данные, которые могут быть использованы для создания команд для управления высокоинтенсивной фокусированной ультразвуковой системой. В некоторых вариантах осуществления план лечения может содержать анатомические или другие данные, описывающие пациента.
Исполнение команд дополнительно побуждает процессор повторно модифицировать план лечения с использованием координат повторного позиционирования и преобразования координат. Этот вариант осуществления может быть предпочтительным, поскольку он обеспечивает средство корректировки положения множества графических объектов, которые указывают местоположение, например, областей для разрушения при воздействии ультразвуком и/или защиты от нагрева.
В другом варианте осуществления медицинское устройство дополнительно содержит высокоинтенсивную фокусированную ультразвуковую систему. Исполнение команд дополнительно побуждает процессор управлять высокоинтенсивной фокусированной ультразвуковой системой в соответствии с планом лечения. Этот вариант осуществления может быть предпочтительным, поскольку план лечения, используемый для управления высокоинтенсивной фокусированной ультразвуковой системой, обновляется с помощью координат повторного позиционирования и преобразования координат.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор выполнить воздействие ультразвукового излучения сниженной интенсивности до получения первых магнитно-резонансных данных. Исполнение команд побуждает процессор проверить регистрацию с помощью первого магнитно-резонансного изображения. Этот вариант осуществления может быть предпочтительным, поскольку воздействие ультразвукового излучения сниженной интенсивности может представлять собой пробный запуск для определения того, является ли совмещение между изображением и высокоинтенсивной фокусированной ультразвуковой системой правильным.
В другом варианте осуществления моделью преобразования координат является модель деформируемой формы. Термин «модель деформируемой формы», используемый в настоящем документе, охватывает модель, описывающую внутреннюю структуру для пациента, в которой используется минимальная энергия или другой алгоритм для аппроксимации модели по фактической геометрии на магнитно-резонансном изображении.
В другом варианте осуществления каждый из графических объектов обладает меткой. Преобразование координат второй группы определяется по меньшей мере частично с помощью метки каждого объекта из второй группы. Например, графические объекты могут обладать типом или меткой, который может быть использован для идентификации типа графических объектов или некоторых из их свойств. Например, при рассмотрении случая пациента, который дышит, органы внутри абдоминальной области могут перемещаться во время дыхания или движения пациента. Путем использования метки конкретный графический объект может быть классифицирован, как анатомическая область, около которой он находится, и это может помочь в выборе модели для прогнозирования движения или, например, могут быть выбраны точки на коже пациента, и в этом случае движение меток может быть ограничено.
В другом варианте осуществления графические объекты представляют собой любое из следующего: клетки, подлежащие терапии, изучаемые области, измеренные дозы, запланированные целевые объемы, и их сочетания.
В другом варианте осуществления память дополнительно содержит модуль выбора изображений, содержащий машиночитаемые команды для исполнения процессором для сегментирования магнитно-резонансного изображения для определения координат повторного позиционирования.
Исполнение команд дополнительно побуждает процессор принимать координаты повторного позиционирования от модуля сегментирования. В этом варианте осуществления положение первой группы определяется автоматически с помощью модуля сегментирования. В некоторых вариантах осуществления модуль сегментирования можно использовать для идентификации и/или сопровождения объектов метками. Сопровождение объекта метками может быть эквивалентно классификации объектов. Классификация затем может быть использована посредством конкретной модели преобразования координат с новыми координатами в ответ на координаты повторного позиционирования. Это может обеспечить более точное и своевременное обновление плана лечения.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор повторно отображать магнитно-резонансное изображение на устройстве отображения. Координаты повторного позиционирования принимаются от пользовательского интерфейса в ответ на отображение вторых магнитно-резонансных данных.
В другом варианте осуществления исполнение команд дополнительно побуждает процессор отображать первое магнитно-резонансное изображение на устройстве отображения. Регистрация принимается от пользовательского интерфейса и появляется в ответ на отображение первого магнитно-резонансного изображения.
В другом аспекте настоящего изобретения предлагается компьютерный программный продукт, содержащий исполняемые машиной команды для исполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему МР-томографии для получения магнитно-резонансных данных из зоны формирования изображений. Исполнение команд дополнительно побуждает процессор получать первые магнитно-резонансные данные с помощью системы магнитно-резонансной визуализации. Исполнение команд дополнительно побуждает процессор реконструировать первое магнитно-резонансное изображение с помощью первых магнитно-резонансных данных. Исполнение команд дополнительно побуждает процессор принимать регистрацию множества графических объектов для первого магнитно-резонансного изображения. Регистрация определяет пространственные положения множества графических объектов по отношению к первому магнитно-резонансному изображению. Исполнение команд дополнительно побуждает процессор повторно получать вторые магнитно-резонансные данные с помощью системы магнитно-резонансной визуализации.
Исполнение команд дополнительно побуждает процессор повторно реконструировать второе магнитно-резонансное изображение с помощью вторых магнитно-резонансных данных. Исполнение команд дополнительно побуждает процессор повторно принимать координаты повторного позиционирования на втором магнитно-резонансном изображении для первой группы, выбранной из множества графических объектов. Координаты повторного позиционирования описывают повторное позиционирование первой группы на втором магнитно-резонансном изображении по отношению к первому магнитно-резонансному изображению. Исполнение команд дополнительно побуждает процессор повторно определять преобразование координат второй группы, выбранной среди множества графических объектов, путем применения модели преобразования координат к координатам повторного позиционирования.
В другом варианте осуществления исполнение команд побуждает процессор принимать план лечения для управления высокоинтенсивной фокусированной ультразвуковой системой с регулируемым фокусом. Исполнение команд дополнительно побуждает процессор повторно модифицировать план лечения с помощью координат повторного позиционирования и преобразования координат.
В другом варианте осуществления медицинское устройство дополнительно содержит высокоинтенсивную фокусированную ультразвуковую систему. Исполнение команд дополнительно побуждает процессор управлять высокоинтенсивной фокусированной ультразвуковой системой в соответствии с планом лечения.
В другом аспекте настоящего изобретения предлагается способ управления медицинским устройством. Медицинское устройство содержит систему магнитно-резонансной визуализации для получения магнитно-резонансных данных и формирования изображения зоны. Способ включает в себя этапы получения первых магнитно-резонансных данных с помощью системы магнитно-резонансной визуализации. Способ дополнительно включает в себя этап реконструкции первого магнитно-резонансного изображения с использованием первых магнитно-резонансных данных. Способ дополнительно включает в себя этап приема регистрации множества графических объектов для первого магнитно-резонансного изображения. Регистрация определяет пространственное положение множества графических объектов по отношению к первому магнитно-резонансному изображению.
Способ дополнительно включает повторное выполнение этапа приема вторых магнитно-резонансных данных с помощью системы магнитно-резонансной визуализации. Способ дополнительно включает в себя повторное выполнение этапа реконструкции второго магнитно-резонансного изображения с использованием вторых магнитно-резонансных данных. Способ дополнительно включает в себя этап повторного получения координат повторного позиционирования на втором магнитно-резонансном изображении для первой группы, выбранной из множества графических объектов. Координаты повторного позиционирования описывают повторное позиционирование первой группы на втором магнитно-резонансном по отношению к первому магнитно-резонансному изображению. Способ дополнительно включает в себя этап повторного определения преобразования координат второй группы, выбранной из множества графических объектов, путем применения модели преобразования координат к координатам повторного позиционирования.
В другом варианте осуществления способ дополнительно включает в себя этап приема плана лечения для управления высокоинтенсивной фокусированной ультразвуковой системой с регулируемым фокусом. Способ дополнительно включает в себя этап модификации плана лечения с использованием координат повторного позиционирования и преобразования координат.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее только в качестве примера описаны предпочтительные варианты осуществления настоящего изобретения и дана ссылка на чертежи, на которых
на фиг. 1 приведена блок-схема, иллюстрирующая пример способа;
на фиг. 2 приведена блок-схема, иллюстрирующая другой пример способа;
на фиг. 3 показан пример медицинского устройства;
на фиг. 4 показан другой пример медицинского устройства;
на фиг. 5 показан пример пользовательского интерфейса;
на фиг. 6 показан другой пример пользовательского интерфейса;
на фиг. 7 показан другой пример пользовательского интерфейса;
на фиг. 8 показан другой пример пользовательского интерфейса; и
на фиг. 9 показан другой пример пользовательского интерфейса.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Одинаково пронумерованные элементы на этих чертежах либо являются эквивалентными, либо выполняют одну и ту же функцию. Элементы, которые описаны выше, не обязательно будут описаны на следующих чертежах, если их функция эквивалентна.
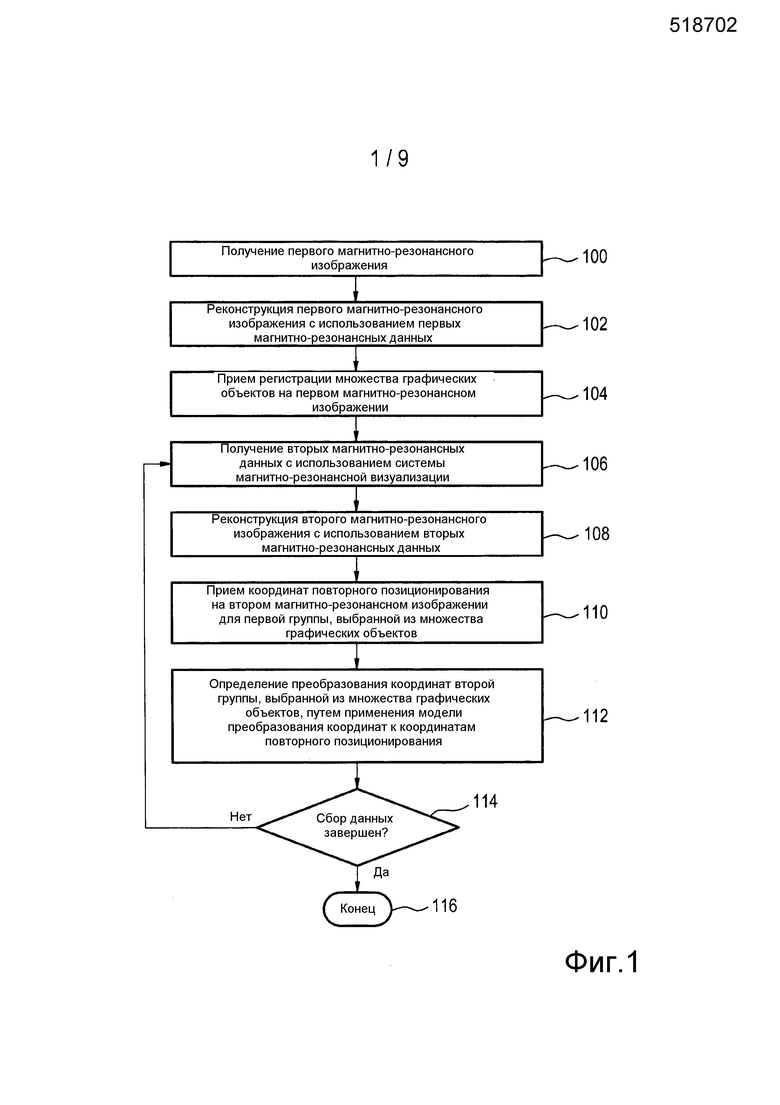
На фиг. 1 приведена блок-схема, на которой показан пример способа. Сначала на этапе 100 получают магнитно-резонансные данные с использованием системы магнитно-резонансной визуализации. Далее на этапе 102 первое магнитно-резонансное изображение реконструируется с использованием первых магнитно-резонансных данных. Далее на этапе 104 регистрация множества графических объектов принимается для первого магнитно-резонансного изображения. Регистрация, например, может поступать с модуля автоматического сегментирования, или она также может быть принята с пользовательского интерфейса. Например, первое магнитно-резонансное изображение может быть выведено на устройство отображения, и пользователь может вручную поместить множество графических объектов на первое магнитно-резонансное изображение, тем самым зарегистрировав их. Далее на этапе 106 получают вторые магнитно-резонансные данные с использованием системы магнитно-резонансной визуализации. Затем на этапе 108 второе магнитно-резонансное изображение реконструируется с использованием вторых магнитно-резонансных данных. Далее на этапе 110 координаты повторного позиционирования принимаются для первой группы объектов, выбранных из множества графических объектов. Координаты повторного позиционирования идентифицируют положение первой группы на втором магнитно-резонансном изображении. Далее на этапе 112 преобразование координат второй группы, выбранной из множества графических объектов, определяется путем применения модели преобразования координат к координатам повторного позиционирования. Далее прямоугольник 114 является прямоугольником решения, завершается ли сбор данных. Если ответ «ДА», способ завершается на этапе 116. Если ответ «НЕТ», способ возвращается к этапу 106, на котором получают вторые магнитно-резонансные данные. Затем способ переходит, как описано выше, и повторяется, пока решением на этапе 114 не будет «ДА».
На фиг. 2 приведена блок-схема, на которой показан другой пример способа.
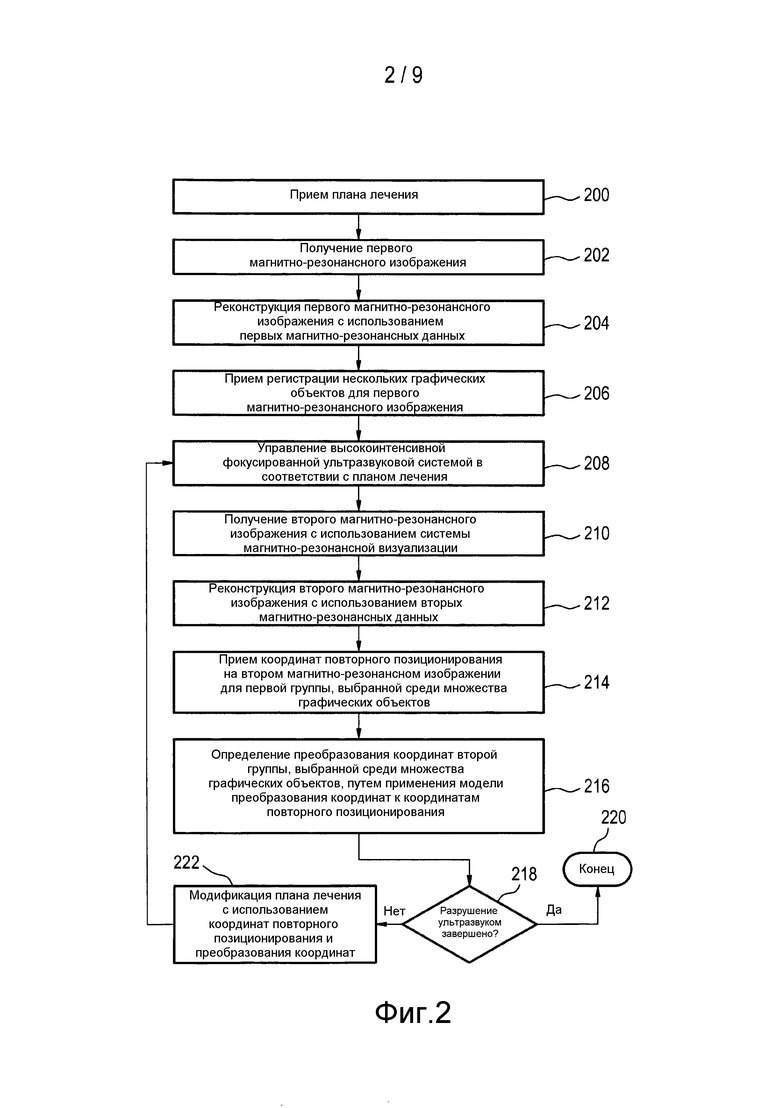
Сначала на этапе 200 принимается план лечения. План лечения может содержать данные, используемые для команд управления наведением высокоинтенсивной фокусированной ультразвуковой системой. Далее на этапе 202 первые магнитно-резонансные данные получают с использованием системы магнитно-резонансной визуализации. Затем на этапе 204 первое магнитно-резонансное изображение реконструируется с использованием первых магнитно-резонансных данных. Далее на этапе 206 принимается регистрация множества графических объектов на первом магнитно-резонансном изображении. Далее на этапе 208 высокоинтенсивная фокусированная ультразвуковая система управляется в соответствии с планом лечения. Затем на этапе 210 вторые магнитно-резонансные данные получают с использованием системы магнитно-резонансной визуализации. Далее на этапе 212 второе магнитно-резонансное изображение реконструируется с использованием вторых магнитно-резонансных данных. Далее на этапе 214 координаты повторного позиционирования принимаются на втором магнитно-резонансном изображении для первой группы, выбранной из множества графических объектов.
Далее на этапе 216 преобразование координат определяется для второй группы, выбранной из множества графических объектов, путем применения модели преобразования координат к координатам повторного позиционирования. Далее этап 218 представляет собой прямоугольник решения. Вопрос состоит в том, завершено ли разрушение ультразвуком. Если ответ «ДА», способ завершается на этапе 220. Если ответ «НЕТ», то на этапе 222 план лечения модифицируется с использованием координат повторного позиционирования и преобразования координат. Способ затем переходит назад к этапу 208, на котором высокоинтенсивной фокусированной ультразвуковой системой управляют в соответствии с планом лечения. Способ затем переходит, как указано выше, и повторяется, пока на этапе 218 не будет указано, что разрушение ультразвуком завершено, и способ завершается на этапе 220. Способ, описанный на фиг. 2, образует замкнутый цикл управления высокоинтенсивной фокусированной ультразвуковой системой.
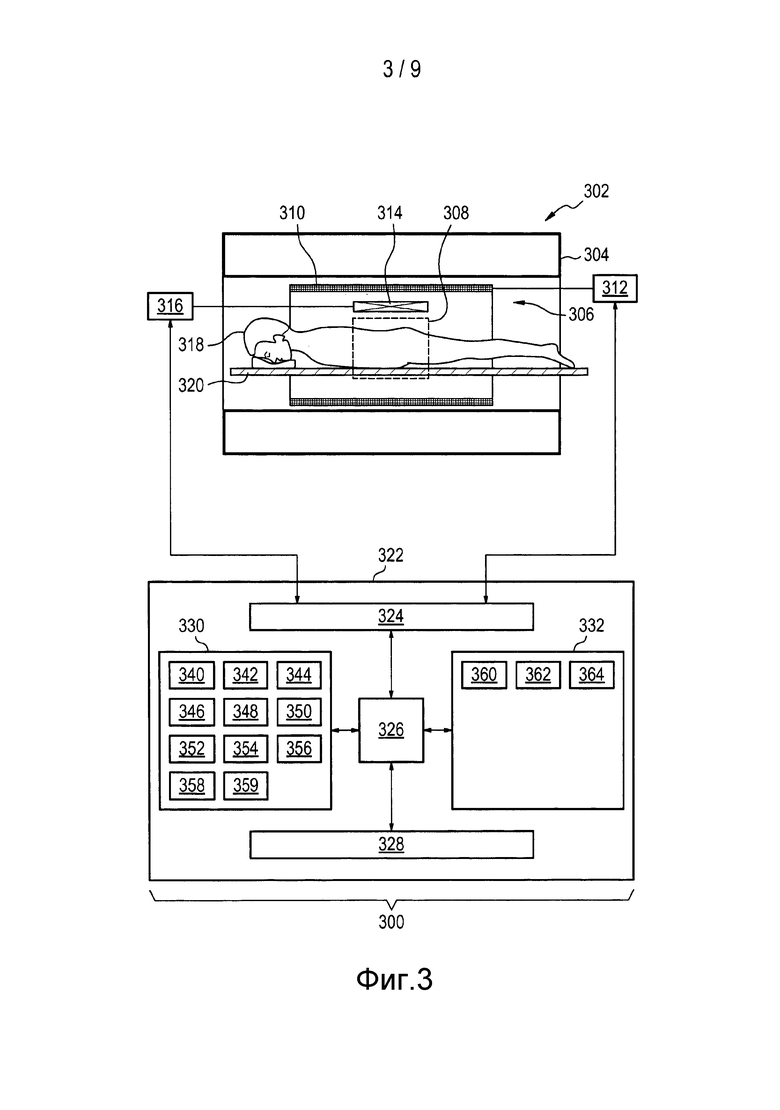
На фиг. 3 показано медицинское устройство 300 по одному варианту осуществления настоящего изобретения. Медицинское устройство 300 содержит систему 302 магнитно-резонансной визуализации. Система 302 магнитно-резонансной визуализации показана с магнитом 304. Магнит 304 представляет собой сверхпроводящий магнит цилиндрического типа с каналом 306, проходящим через его центр. Магнит 304 содержит криостат, охлаждаемый жидким гелием, со сверхпроводящими катушками. Также могут быть использованы постоянные или резистивные магниты. Также возможно использование других типов магнитов, например, также можно использовать и цилиндрический магнит с расщеплением, и так называемый открытый магнит. Цилиндрический магнит с расщеплением аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат расщеплен на две секции для обеспечения доступа к изометрической плоскости магнита, чтобы магниты можно было использовать, например, в комбинации с терапией пучком заряженных частиц. Открытый магнит обладает двумя секциями магнита, одна над другой, с пространством между ними, достаточно большим, чтобы принимать пациента: компоновка двух секций аналогична катушке Гельмгольца. Открытые магниты широко применяются, поскольку пациент меньше ограничен. Внутри криостата цилиндрического магнита имеется набор сверхпроводящих катушек. Внутри канала 306 цилиндрического магнита 304 имеется зона 308 формирования изображений, в которой магнитное поле является сильным и достаточно однородным, чтобы выполнять магнитно-резонансную визуализацию.
Также внутри канала 306 магнита имеется градиентная катушка 310, создающая магнитное поле, которая используется для сбора магнитно-резонансных данных для пространственной кодировки магнитных спинов внутри зоны формирования изображений магнита. Градиентная катушка 310, создающая магнитное поле, соединена с источником 312 питания градиентной катушки, создающей магнитное поле. Градиентная катушка, создающая магнитное поле, является репрезентативной. Обычно градиентные катушки, создающие магнитное поле, содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник 312 питания градиентных катушек, создающих магнитное поле, подает питание на градиентные катушки. Ток, подаваемый на катушки, создающие магнитное поле, регулируется в зависимости от времени и может быстро линейно возрастать и/или быть импульсным.
Около зоны 308 формирования изображений находится РЧ-катушка 314. РЧ-катушка 314 соединена с РЧ-приемопередатчиком 316. Также в канале магнита 304 находится пациент 318, который располагается на опоре 320 для пациента и частично находится в пределах зоны 308 формирования изображений.
Около зоны 308 формирования изображений находится РЧ-катушка 314 для управления ориентацией магнитных спинов в пределах зоны 308 формирования изображений и для приема РЧ-сигналов, передаваемых от спинов, также в пределах зоны 308 формирования изображений. РЧ-катушка 314 может содержать множество катушечных элементов. РЧ-катушка 314 также может быть названа каналом или антенной. РЧ-катушка соединена с РЧ-приемопередатчиком 316. РЧ-катушка 314 и РЧ-приемопередатчик 316 могут быть заменены отдельными передающими и принимающими катушками и отдельным приемником и передатчиком. Очевидно, что РЧ-катушка 314 и РЧ-приемопередатчик 316 являются репрезентативными. РЧ-катушка 314 предназначена также, чтобы представлять специальную передающую антенну и специальную принимающую антенну. Аналогично, приемопередатчик 316 также может представлять собой отдельный передатчик и отдельный приемник.
Источник 312 питания градиентных катушек, создающих магнитное поле, и РЧ-приемопередатчик 316 соединены с аппаратным интерфейсом 324 вычислительной системы 322. Вычислительная система 322 дополнительно содержит процессор 326. Процессор 326 соединен с аппаратным интерфейсом 324. Аппаратный интерфейс 324 позволяет процессору 326 передавать и принимать данные и команды на и от системы 302 магнитно-резонансной визуализации. Вычислительная система 322 дополнительно содержит пользовательский интерфейс 328, запоминающее устройство 330 вычислительной машины и память 332 вычислительной машины.
Запоминающее устройство 330 показано как содержащее импульсную последовательность 340. Импульсная последовательность 340 содержит команды или данные, которые могут быть использованы для создания команд управления работой и функционированием системы 302 магнитно-резонансной визуализации. Запоминающее устройство 330 вычислительной машины показано, как дополнительно содержащее первые магнитно-резонансные данные, которые получены с использованием импульсной последовательности 340. Запоминающее устройство 330 вычислительной машины показано, как дополнительно содержащее первое магнитно-резонансное изображение 344, которое реконструировано по первым магнитно-резонансным данным 342. Запоминающее устройство 330 вычислительной машины дополнительно показано как содержащее множество графических объектов. Запоминающее устройство 330 вычислительной машины дополнительно показано как содержащее первую группу или идентификацию первой группы 348 в пределах множества графических объектов 346.
Запоминающее устройство 330 вычислительной машины дополнительно показано как содержащее вторую группу 350 или идентификацию второй группы 350, выбранной из множества графических объектов 346. Запоминающее устройство 330 вычислительной машины показано, как дополнительно содержащее регистрацию 352 изображений множества графических объектов 346 на первом магнитно-резонансном изображении 344. Запоминающее устройство 330 вычислительной машины дополнительно показано как содержащее вторые магнитно-резонансные данные 354. Запоминающее устройство 330 вычислительной машины показано, как дополнительно содержащее второе магнитно-резонансное изображение 356, реконструированное по вторым магнитно-резонансным данным 354. Запоминающее устройство 330 вычислительной машины дополнительно показано, как содержащее координаты 358 повторного позиционирования, которые идентифицируют местоположение первой группы 348 в пределах второго магнитно-резонансного изображения 356. Запоминающее устройство 330 вычислительной машины показано, как дополнительно содержащее преобразование 358 координат, которое идентифицирует местоположение второй группы 350 в пределах второго магнитно-резонансного изображения 356.
Память 332 вычислительной системы показана как содержащая модуль 360 управления. Модуль 360 управления содержит исполняемый компьютером код, который позволяет процессору 326 управлять работой и функционированием системы 302 магнитно-резонансной визуализации. Например, он может использовать импульсную последовательность 340 для получения магнитно-резонансных данных 342, 354. Память 332 вычислительной системы дополнительно показана как содержащая модуль 362 реконструкции изображений. Модуль 362 реконструкции изображений позволяет процессору реконструировать первое магнитно-резонансное изображение 344 по первым магнитно-резонансным данным 342. Модуль 362 реконструкции изображений также позволяет реконструировать второе магнитно-резонансное изображение 356 по вторым магнитно-резонансным данным 354. Память 332 вычислительной системы дополнительно показана как содержащая модуль 364 преобразования координат, который позволяет процессору 362 рассчитывать преобразование 359 координат с использованием координат 358 повторного позиционирования.
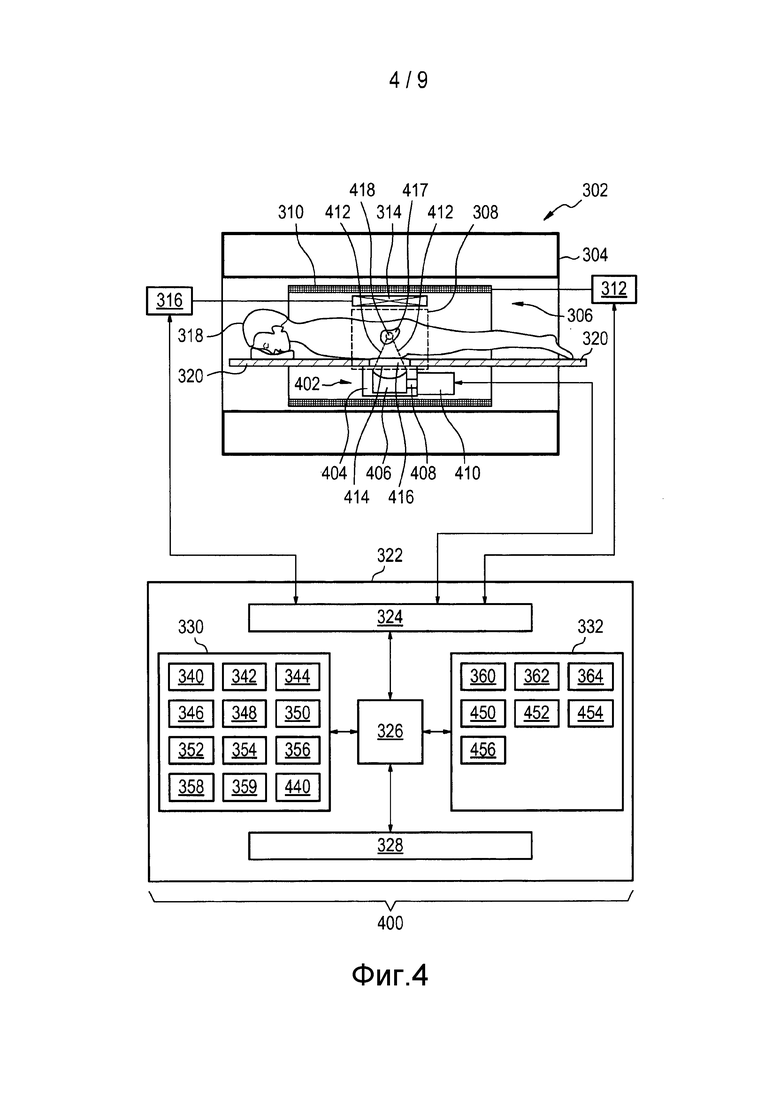
На фиг. 4 показан другой вариант осуществления медицинского устройства 400 по настоящему изобретению. В этом варианте осуществления нагревательная система представляет собой высокоинтенсивную фокусированную ультразвуковую систему 402. Высокоинтенсивная фокусированная ультразвуковая система содержит заполненную текучей средой камеру 404. Внутри заполненной текучей средой камеры 404 находится ультразвуковой датчик 406. Хотя это не показано на чертеже, ультразвуковой датчик 406 может содержать множество элементов ультразвукового датчика, каждый из которых может формировать отдельный пучок ультразвукового излучения. Это может быть использовано для управления местоположением точки 418 разрушения ультразвуком с электронным управлением путем регулировки фазы и/или амплитуды переменного электрического тока, подаваемого на каждый из элементов ультразвукового датчика. Точка 418 разрушения ультразвуком регулируется для разрушения ультразвуком целевой зоны 417.
Ультразвуковой датчик 406 соединен с механизмом 408, который позволяет повторно позиционировать ультразвуковой датчик 406 механически. Механизм 408 соединен с механическим силовым приводом 410, который предназначен для запуска механизма 408. Механический силовой привод 410 также обеспечивает подачу питания для подачи электрической мощности на ультразвуковой датчик 406. В некоторых вариантах осуществления подача питания позволяет регулировать фазу и/или амплитуду электрической мощности для отдельных элементов ультразвукового датчика. В некоторых вариантах осуществления механический привод/источник 410 питания расположен вне канала 306 магнита 304.
Ультразвуковой датчик 406 формирует ультразвуковое излучение, которое, как показано, проходит по пути 412. Ультразвуковое излучение 412 проходит через заполненную текучей средой камеру 404 и через ультразвуковое окно 414. В этом варианте осуществления ультразвуковое излучение затем проходит через подушечку 416 с гелем. Подушечка с гелем необязательно присутствует во всех вариантах осуществления, но в этом варианте осуществления имеется углубление в опоре 320 для пациента для приема подушечки 416 с гелем. Подушечка 416 с гелем способствует объединению ультразвуковой мощности между датчиком 406 и пациентом 318. После прохождения через подушечку 416 с гелем ультразвуковое излучение 412 проходит через пациента 318 и фокусируется в точке 418 разрушения ультразвуком. Точка 418 разрушения ультразвуком сфокусирована в пределах целевой зоны 418. Точка 418 разрушения ультразвуком может перемещаться посредством комбинации механического позиционирования ультразвукового датчика 406 и электронного управления положением точки 418 разрушения ультразвуком для терапии всей целевой зоны 418.
Высокоинтенсивная фокусированная ультразвуковая система 402 показана также с соединением с аппаратным интерфейсом 324 вычислительной системы 322. Вычислительная система 322 и содержимое ее запоминающего устройства 330 и памяти 332 эквивалентны показанным на фиг. 3.
В этом примере запоминающее устройство 330 вычислительной машины показано как дополнительно содержащее план 440 лечения. Память 332 вычислительной системы показана как дополнительно содержащая модель 450 управления высокоинтенсивной фокусированной ультразвуковой системой. Модуль 450 управления высокоинтенсивной фокусированной ультразвуковой системой содержит исполняемый компьютером код, который позволяет процессору 326 управлять высокоинтенсивной фокусированной ультразвуковой системой 402 с использованием плана 440 лечения. Память 332 вычислительной системы показана как дополнительно содержащая модуль 452 модификации плана лечения. Модуль 452 модификации плана лечения содержит исполняемый компьютером код, который позволяет процессору 326 модифицировать план 440 лечения с использованием координат 358 повторного позиционирования и преобразования 359 координат.
Память 332 вычислительной системы показана как дополнительно содержащая модуль 454 сегментирования изображений. Модуль 454 сегментирования изображений не присутствует во всех примерах и позволяет процессору 326 формировать регистрацию 352 изображений с использованием первого магнитно-резонансного изображения 344. Память 332 вычислительной системы дополнительно показана как содержащая модуль 456 управления пользовательским интерфейсом. Модуль 456 управления пользовательским интерфейсом может необязательно присутствовать во всех примерах. Модуль 456 управления пользовательским интерфейсом содержит исполняемый компьютером код, который позволяет процессору 326 вывести второе магнитно-резонансное изображение 356 на устройство отображения и принимать координаты 358 повторного позиционирования от пользовательского интерфейса, например графического пользовательского интерфейса.
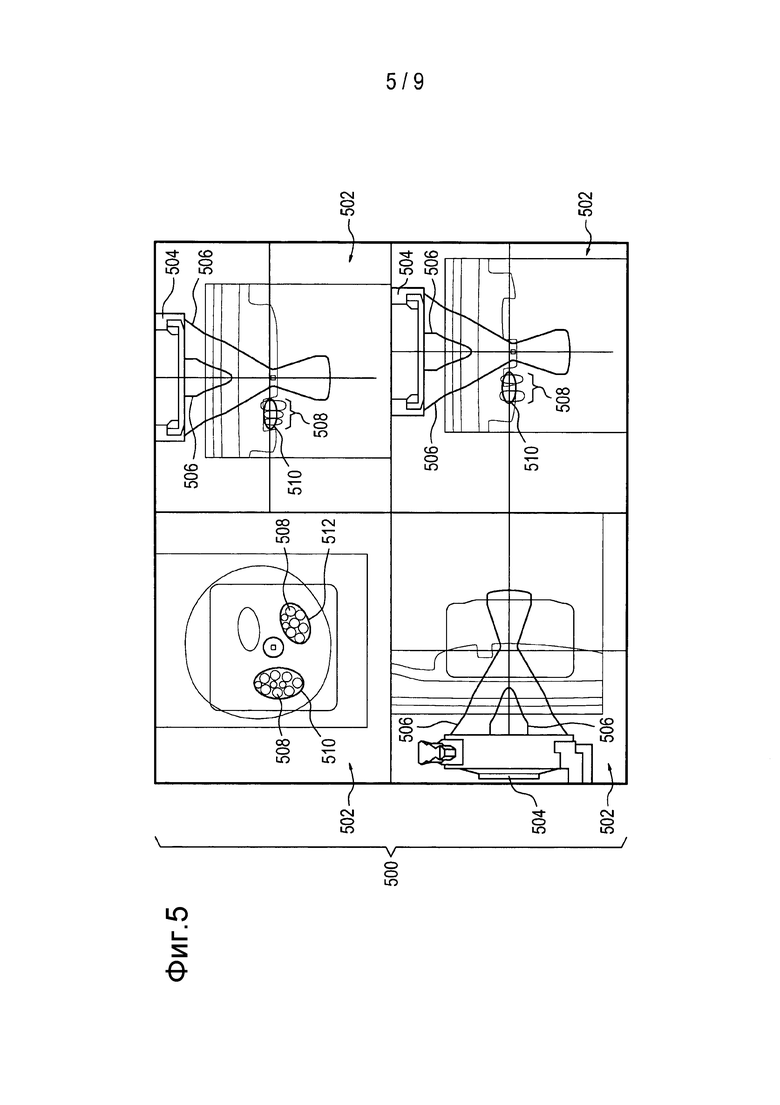
На фиг. 5 показан участок графического пользовательского интерфейса 500. Графический пользовательский интерфейс 500 отображает номер первого магнитно-резонансного изображения 502. На некоторых из этих изображений можно видеть модель высокоинтенсивного фокусированного ультразвукового датчика 504. На некоторых из этих чертежей также указан путь ультразвукового излучения 506. На различных чертежах указано число объемов 508 для разрушения ультразвуком. Также указаны первый графический объект 510 и второй графический объект 512.
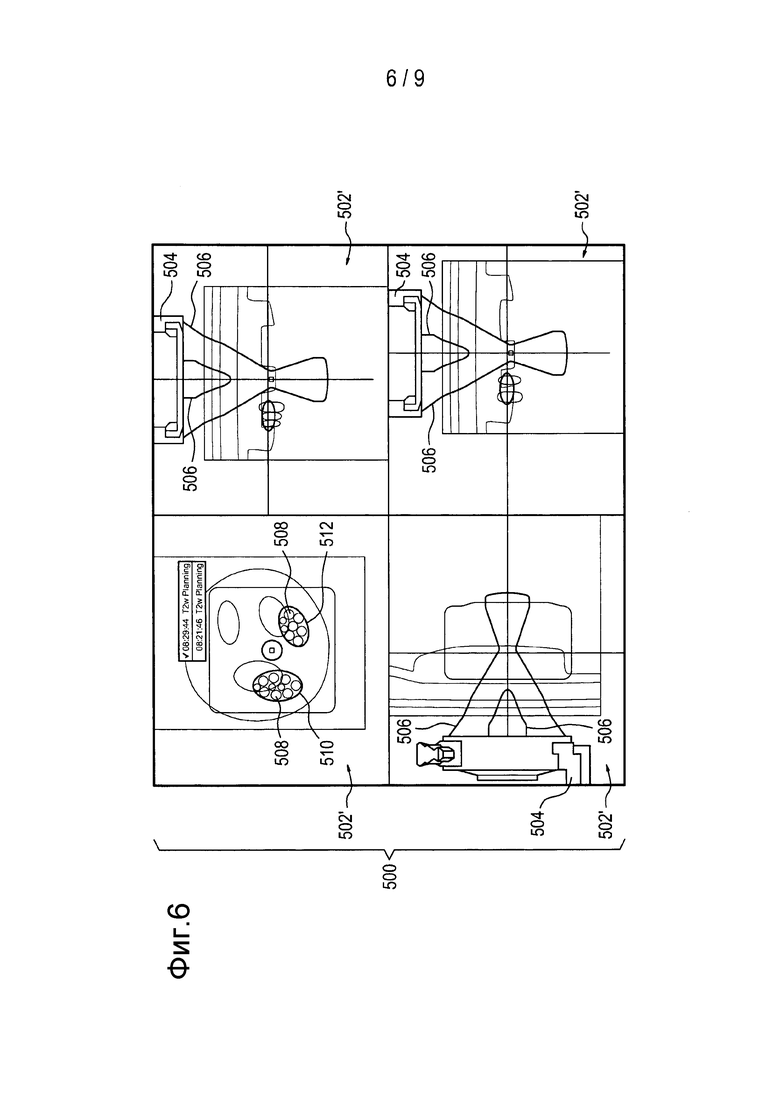
На фиг. 6 показан вид того же самого графического интерфейса за исключением полученного последнего магнитно-резонансного изображения. Новые МР-изображения являются вторыми магнитно-резонансными изображениями и указаны номером 502’. Можно видеть, что первый графический объект 510 и второй графический объект 512 смещены по отношению к магнитно-резонансному изображению 502’. Это может быть репрезентативно для пациента, движущегося во время или между моментами разрушения ультразвуком. Если объемы 508 для разрушения ультразвуком разрушаются, это будет выполнено в местоположении, которое отличается от исходного анатомического положения, показанного на фиг. 5.
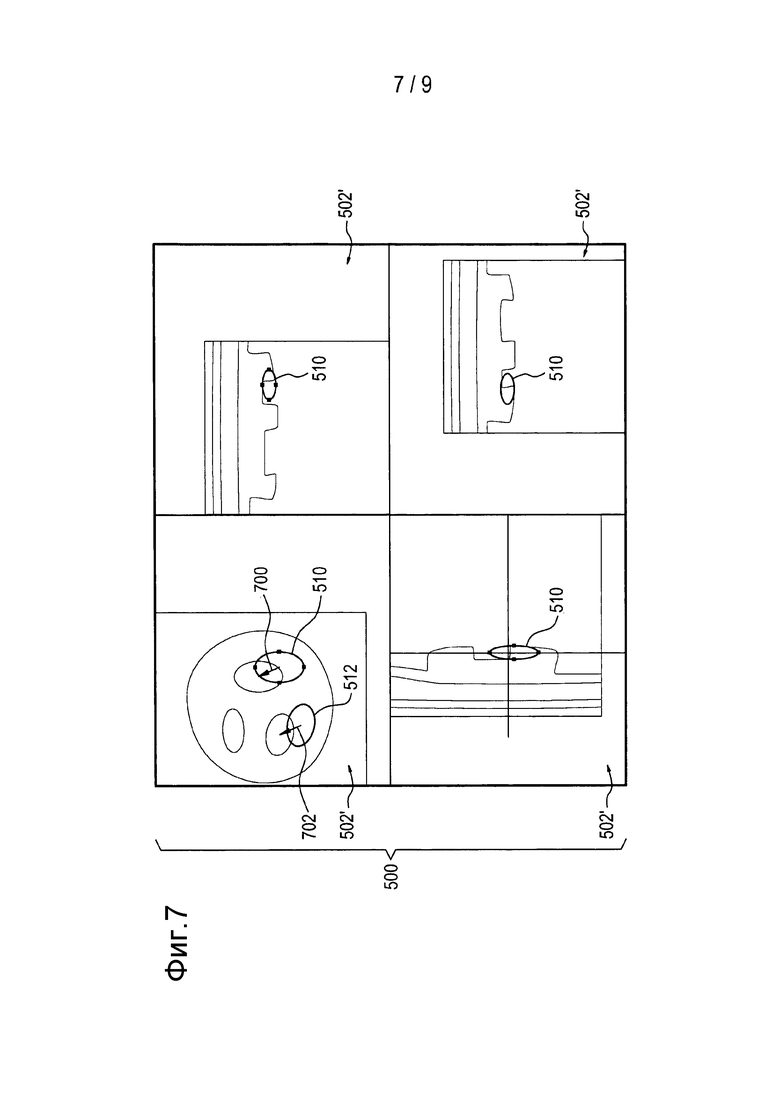
На фиг. 7 повторно показан графический пользовательский интерфейс 500. В этом примере первый графический объект 510 выбран и повторно позиционирован на магнитно-резонансном изображении 502’. Следовательно, первый графический объект 510 является первой группой. Второй графический объект 512 образует вторую группу. Преобразование 700, корректирующее положение первого графического объекта 510, указано на фиг. 7 и эквивалентно координатам повторного позиционирования. Преобразование 702, корректирующее положение второго графического объекта 512, также указано на фиг. 7 и эквивалентно преобразованию координат. Некоторые из изображений, показанных на фиг. 7, показаны в другой плоскости по отношению к изображениям на фиг. 5, 6, 8 и 9 и с другой ориентацией.
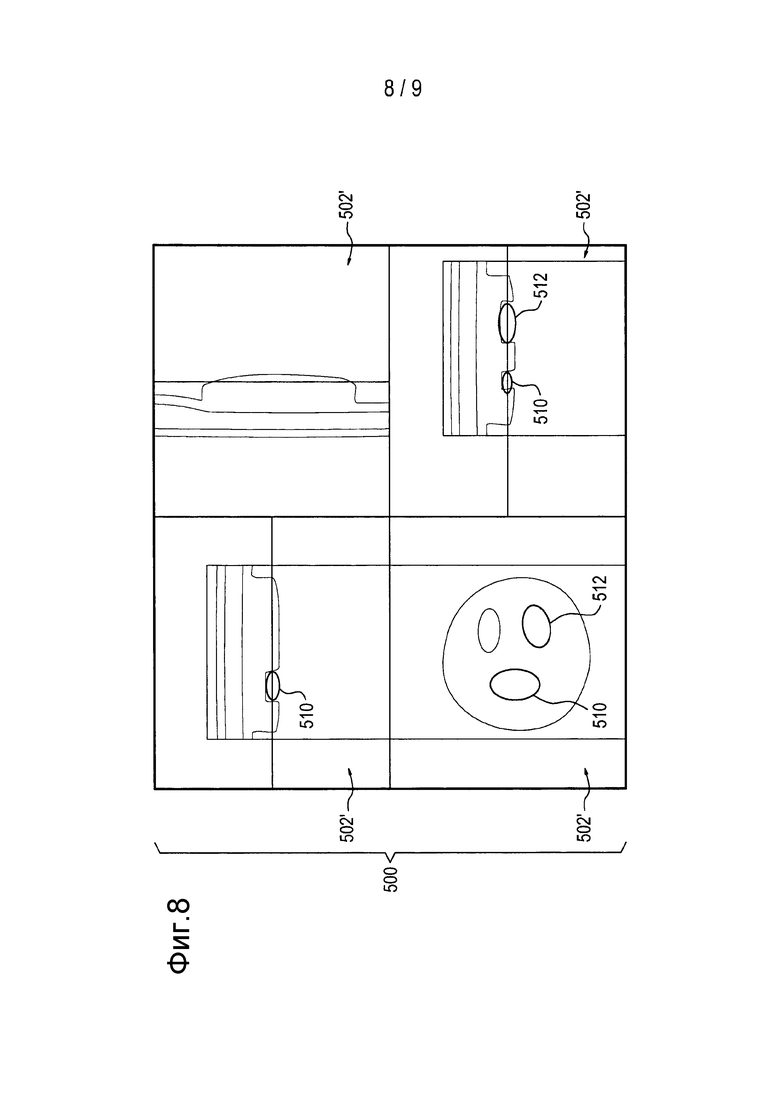
На фиг. 8 первый графический объект 510 перемещен назад в его правильное положение и правильно зарегистрирован на магнитно-резонансном изображении 502’. Первый графический объект 510 перемещен в положение, установленное на трех разных изображениях. Положение второго графического объекта 512 обновлено автоматически путем применения модели преобразования координат.
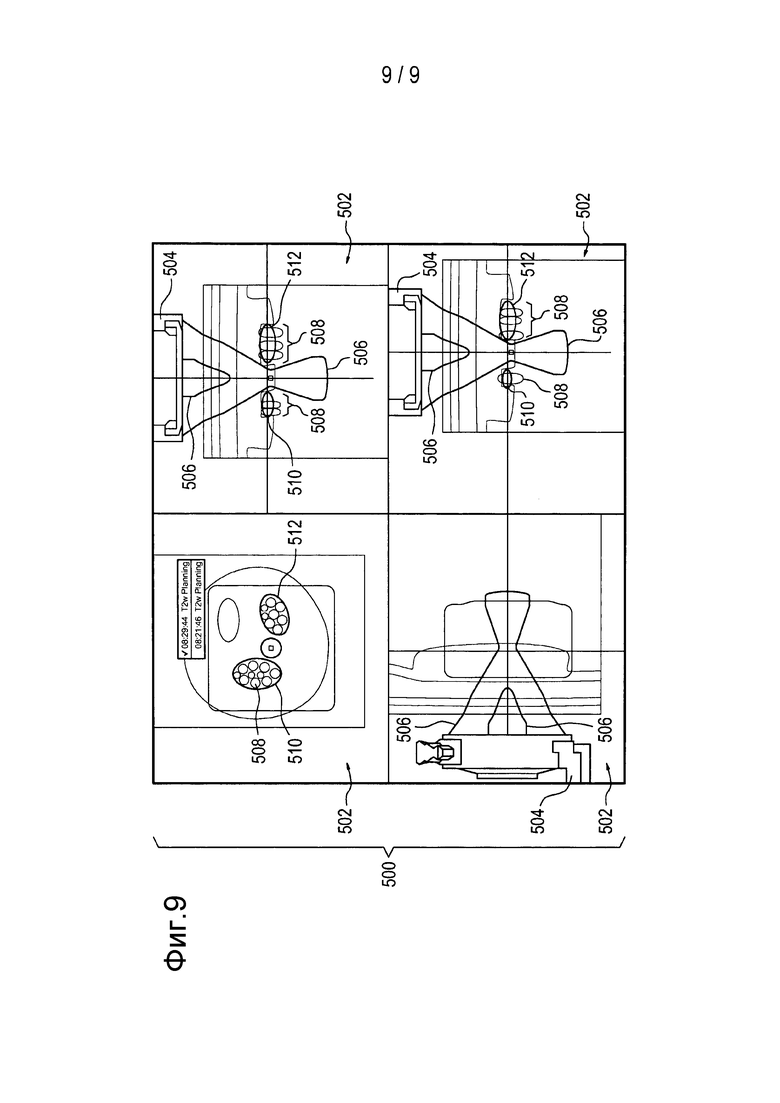
На фиг. 9 указано, как объемы 508 для разрушения ультразвуком повторно позиционированы с использованием новых положений первого графического объекта 510 и второго графического объекта 512.
При высокоинтенсивном фокусированном ультразвуковом исследовании (HIFU) перемещение пациента или органа может вызвать неверное совмещение между уже полученными изображениями и физическим положением пациента. Неправильное совмещение может быть скорректировано путем получения новых изображений пациента и сравнения старых и новых изображений. В варианте осуществления настоящего изобретения могут быть использованы уже существующие графические объекты HIFU, такие как запланированный целевой объем, для выполнения совмещения: один из запланированных объектов HIFU повторно позиционирован на новом наборе изображений без необходимости сначала определять опознавательные точки или другие специфические для совмещения изучаемые области.
Совмещение наборов изображений, полученные в разное время с возможным движением пациента между ними, обычно обеспечивается алгоритмом автоматического повторного совмещения или ручным способом на основе опознавательных точек. Эти инструменты обычно позволяют создать карты полей векторов смещения или аффинное преобразование для описания изменения положения пациента.
Варианты осуществления настоящего изобретения могут повторно использовать графические средства планирования и терапии HIFU для повторной регистрации положения пациента: при получении новых изображений положения графических объектов HIFU на новых изображениях проверяются визуально. Если обнаружено расхождение, например, граница фибромы больше не соответствует первоначальному эллипсоиду запланированной целевой области, графический объект HIFU повторно позиционируется на одном или более 2D срезах для регистрации плана HIFU и данных по возможному разрушению ультразвуком на новых изображениях. Другие графические объекты HIFU обновляются и действуют, как проверка регистрации.
Хотя настоящее изобретение проиллюстрировано и описано подробно на чертежах и в предшествующем описании, такую иллюстрацию и описание следует рассматривать, как иллюстративную или пример, и не подразумевающую ограничения; настоящее изобретение не ограничивается описанными вариантами осуществления.
Другие варианты описанных вариантов осуществления понятны и осуществимы специалистами в этой области при реализации настоящего изобретения по изучению чертежей, описания и заявленной формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, и упоминание единственного числа не исключает множественного числа. Одиночный процессор или другой блок может выполнять функции множества элементов, упомянутых в формуле изобретения. Простой факт, что некоторые меры измерений упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер измерения не может быть использована для достижения преимущества. Компьютерная программа может быть сохранена/распределена на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе с или в качестве части другого аппаратного обеспечения, но также может быть распределена в других формах, например, по сети Internet или другим проводным или беспроводным системам дистанционной связи. Никакие условные обозначения в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
300 медицинское устройство
302 система магнитно-резонансной визуализации
304 магнит
306 канал магнита
308 зона формирования изображений
310 градиентная катушка, создающая магнитное поле
312 источник питания градиентной катушки, создающей магнитное поле
314 РЧ-катушка
316 РЧ-приемопередатчик
318 пациент
320 опора для пациента
322 вычислительная система
324 аппаратный интерфейс
326 процессор
328 пользовательский интерфейс
330 запоминающее устройство вычислительной системы
332 память вычислительной системы
340 импульсная последовательность
342 первые магнитно-резонансные данные
344 первое магнитно-резонансное изображение
346 множество графических объектов
348 первая группа
350 вторая группа
352 регистрация изображений
354 вторые магнитно-резонансные данные
356 второе магнитно-резонансное изображение
358 координаты повторного позиционирования
359 преобразование координат
360 модуль управления
362 модуль реконструкции изображений
364 модуль преобразования координат
400 медицинское устройство
402 высокоинтенсивная фокусированная ультразвуковая система
404 заполненная текучей средой камера
406 ультразвуковой датчик
408 механизм
410 механический силовой привод/источник питания
412 путь ультразвукового излучения
414 ультразвуковое окно
416 подушечка с гелем
417 целевая зона
418 точка разрушения ультразвуком
440 план лечения
450 модуль управления высокоинтенсивной фокусированной ультразвуковой системой
452 модуль модификации плана лечения
454 модуль сегментирования изображения
456 модуль управления пользовательским интерфейсом
500 графический пользовательский интерфейс
502 магнитно-резонансное изображение
502’ магнитно-резонансное изображение
504 высокоинтенсивный фокусированный ультразвуковой датчик
506 путь ультразвукового излучения
508 объемы для разрушения ультразвуком
510 первый графический объект
512 второй графический объект
700 преобразование
702 преобразование,
Использование: для регистрации графических объектов на магнитно-резонансном изображении. Сущность изобретения заключается в том, что система магнитно-резонансной визуализации получает первые магнитно-резонансные данные и реконструирует первое магнитно-резонансное изображение. Принимается регистрация множества графических объектов для первого МР-изображения, которая определяет пространственное положение множества графических объектов на первом магнитно-резонансном изображении. Способ дополнительно включает в себя повторное: получение вторых магнитно-резонансных данных; реконструкцию второго магнитно-резонансного изображения; прием координат повторного позиционирования на втором магнитно-резонансном изображении для первой группы, выбранной из множества графических объектов; и определение преобразования координат второй группы, выбранной из множества графических объектов путем применения модели преобразования координат к координатам повторного позиционирования. Технический результат: обеспечение возможности более точного учета движения контролируемого объекта. 3 н. и 7 з.п. ф-лы, 9 ил.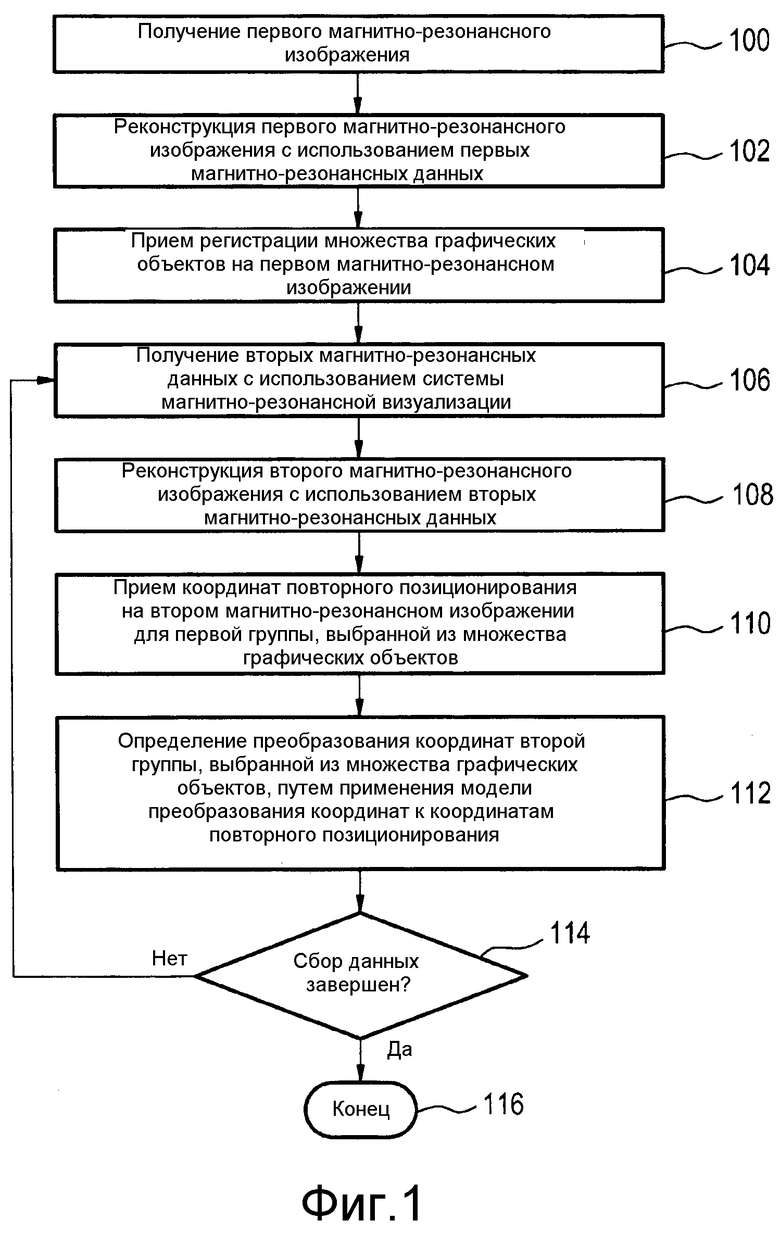
1. Медицинское устройство (300, 400), содержащее:
систему (302) магнитно-резонансной визуализации для получения магнитно-резонансных данных (342, 354) из зоны (308) формирования изображений; и
высокоинтенсивную фокусированную ультразвуковую систему (402) с регулируемым фокусом (418),
процессор (326) для управления медицинским устройством; и
память (332), содержащую машиночитаемые команды (360, 362, 364, 450, 452, 454, 456) для исполнения процессором; причем исполнение команд побуждает процессор
- получать (100, 202) первые магнитно-резонансные данные (342) с использованием системы магнитно-резонансной визуализации,
- реконструировать (102, 204) первое магнитно-резонансное изображение (344, 502) с использованием первых магнитно-резонансных данных, причем по первому магнитно-резонансному изображению формируется план (440) лечения для управления высокоинтенсивной фокусированной ультразвуковой системой (402), и формирование плана лечения включает в себя идентификацию одного или более графических объектов на первом магнитно-резонансном изображении,
причем исполнение команд дополнительно побуждает процессор
- принимать (104, 206) регистрацию (352) одного или более графических объектов (346, 510, 512) для первого магнитно-резонансного изображения, причем регистрация определяет пространственные положения одного или более графических объектов по отношению к первому магнитно-резонансному изображению, и
исполнение команд дополнительно побуждает процессор повторно:
- получать (106, 210) вторые магнитно-резонансные данные (354) с использованием системы магнитно-резонансной визуализации;
- реконструировать (108, 212) второе магнитно-резонансное изображение (356, 502’) с использованием вторых магнитно-резонансных данных;
- принимать (110, 214) координаты (358, 700) повторного позиционирования на втором магнитно-резонансном изображении для первой группы (348, 510), выбранной из одного или более графических объектов, причем координаты повторного позиционирования описывают повторное позиционирование первой группы на втором магнитно-резонансном изображении по отношению к первому магнитно-резонансному изображению; и
- определять (112, 216) преобразование (359, 702) координат второй группы (350, 512), выбранной из одного или более графических объектов, путем применения модели (364) преобразования координат к координатам повторного позиционирования и
- при этом исполнение команд дополнительно побуждает процессор повторно модифицировать (222) план лечения с использованием координат повторного позиционирования и преобразования координат и
- управлять (208) высокоинтенсивной фокусированной ультразвуковой системой в соответствии с модифицированным планом лечения.
2. Медицинское устройство по п.1, в котором высокоинтенсивная фокусированная ультразвуковая система обладает регулируемой интенсивностью ультразвука, причем исполнение команд дополнительно побуждает процессор выполнять разрушение ультразвуком сниженной интенсивности до получения первых магнитно-резонансных данных, причем исполнение команд побуждает процессор проверять регистрацию с использованием первого магнитно-резонансного изображения.
3. Медицинское устройство по п.1, в котором моделью преобразования координат является модель деформируемой формы.
4. Медицинское устройство по п.1, в котором каждый графический объект снабжен меткой, преобразование координат второй группы определяется по меньшей мере частично с использованием метки каждого объекта из второй группы.
5. Медицинское устройство по п.1, в котором графические объекты представляют собой любое из следующего: клетки, подлежащие терапии, изучаемые области, измеренные дозы, запланированные целевые объемы, и их сочетания.
6. Медицинское устройство по п.1, в котором память дополнительно содержит модуль (454) сегментирования изображений, содержащий машиночитаемые команды для исполнения процессором для сегментирования второго магнитно-резонансного изображения для определения координат повторного позиционирования, и в котором исполнение команд дополнительно побуждает процессор принимать координаты повторного позиционирования от модуля сегментирования.
7. Медицинское устройство по любому из пп.1-5, в котором исполнение команд дополнительно побуждает процессор повторно отображать второе магнитно-резонансное изображение на устройстве (500) отображения, и в котором координаты повторного позиционирования принимаются от пользовательского интерфейса в ответ на отображение вторых магнитно-резонансных данных.
8. Медицинское устройство по п.7, в котором исполнение команд дополнительно побуждает процессор отображать первое МР-изображение на устройстве отображения, и в котором регистрация принимается от пользовательского интерфейса в ответ на отображение первых магнитно-резонансных данных.
9. Машиночитаемый носитель информации, на котором сохранён компьютерный программный продукт, содержащий машиночитаемые команды (360, 362, 364, 450, 452, 454, 456) для исполнения процессором (326), управляющим медицинским устройством (300, 400), причем медицинское устройство содержит систему (302) магнитно-резонансной визуализации для получения магнитно-резонансных данных (342, 354) из зоны (308) формирования изображений, и высокоинтенсивную фокусированную ультразвуковую систему (402) с регулируемым фокусом (418),
- причем исполнение команд дополнительно побуждает процессор получать (100, 202) первые магнитно-резонансные данные (342) с помощью системы магнитно-резонансной визуализации и по первому магнитно-резонансному изображению формировать план (440) лечения для управления высокоинтенсивной фокусированной ультразвуковой системой (402), и формирование плана лечения включает в себя идентификацию одного или более графических объектов на первом магнитно-резонансном изображении,
причем исполнение команд дополнительно побуждает процессор
реконструировать (102, 204) первое магнитно-резонансное изображение (344, 502) с использованием первых магнитно-резонансных данных, причем исполнение команд дополнительно побуждает процессор принимать (104, 206) регистрацию (352) одного или более графических объектов (346, 510, 512) для первого магнитно-резонансного изображения, причем регистрация определяет пространственное положение одного или более графических объектов по отношению к первому магнитно-резонансному изображению, исполнение команд дополнительно побуждает процессор повторно:
- получать (106, 210) вторые магнитно-резонансные данные (354) с использованием системы магнитно-резонансной визуализации;
- реконструировать (108, 212) второе магнитно-резонансное изображение (356, 502’) с использованием вторых магнитно-резонансных данных;
- принимать (110, 214) координаты (358, 700) повторного позиционирования на втором магнитно-резонансном изображении для первой группы (348, 510), выбранной из одного или более графических объектов, причем координаты повторного позиционирования описывают повторное позиционирование первой группы на втором магнитно-резонансном изображении по отношению к первому магнитно-резонансному изображению; и
- определять (112, 216) преобразование (359, 702) координат второй группы (350, 512), выбранной из одного или более графических объектов, путем применения модели (364) преобразование координат к координатам повторного позиционирования, и
- при этом исполнение команд дополнительно побуждает процессор повторно модифицировать (222) план лечения с использованием координат повторного позиционирования и преобразования координат и
- управлять (208) высокоинтенсивной фокусированной ультразвуковой системой в соответствии с модифицированным планом лечения.
10. Способ управления медицинским устройством (300, 400), в котором медицинское устройство содержит систему (302) магнитно-резонансной визуализации для получения магнитно-резонансных данных (342, 354) из зоны (308) формирования изображений; и
- высокоинтенсивную фокусированную ультразвуковую систему (402) с регулируемым фокусом (418),
причем способ включает в себя этапы, на которых:
- получают (100, 202) первые магнитно-резонансные данные (342) с использованием системы магнитно-резонансной визуализации;
- реконструируют (102, 204) первое магнитно-резонансное изображение (344, 502) с использованием первых магнитно-резонансных данных;
- принимают (104, 206) регистрацию (352) одного или более графических объектов (346, 510, 512) для первого магнитно-резонансного изображения; причем регистрация определяет пространственные положения одного или более графических объектов по отношению к первому магнитно-резонансному изображению; и по первому магнитно-резонансному изображению формируется план (440) лечения для управления высокоинтенсивной фокусированной ультразвуковой системой (402), и формирование плана лечения включает в себя идентификацию одного или более графических объектов на первом магнитно-резонансном изображении,
причем исполнение команд дополнительно побуждает процессор повторно:
- получать (106, 210) вторые магнитно-резонансные данные (354) с использованием системы магнитно-резонансной визуализации;
- реконструировать (108, 212) второе магнитно-резонансное изображение (356, 502’) с использованием вторых магнитно-резонансных данных;
- принимать (110, 214) координаты (358, 700) повторного позиционирования на втором магнитно-резонансном изображении для первой группы (348, 510), выбранной из одного или более графических объектов, причем координаты повторного позиционирования описывают повторное позиционирование первой группы на втором магнитно-резонансном изображении по отношению к первому магнитно-резонансному изображению; и
- определять (112, 216) преобразование (359, 702) координат второй группы (350, 512), выбранной из одного или более графических объектов, путем применения модели (364) преобразования координат к координатам повторного позиционирования, и
- причем исполнение команд дополнительно побуждает процессор повторно модифицировать (222) план лечения с использованием координат повторного позиционирования и преобразования координат и
- управлять (208) высокоинтенсивной фокусированной ультразвуковой системой в соответствии с модифицированным планом лечения.
| US 2008238426A1, 02.10.2008 | |||
| US 2008143333A1, 19.06.2008 | |||
| US 2008021305A1, 24.01.2008 | |||
| US 20080042651A1, 21.02.2008 | |||
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА НА ОСНОВЕ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2005 |
|
RU2366475C2 |

