Изобретение относится к ракетно-космической технике, а именно к ракетам космического назначения (РКН).
В ракетной технике известен выбранный в качестве прототипа способ выведения на орбиту ракеты космического назначения пакетной схемы на участке полета до отделения боковых блоков, заключающийся в старте ракеты, в выполнении программного разворота по крену на соответствующий азимуту прицеливания начальный угол γ0 для совмещения плоскости I-III с заданным азимутом прицеливания, в изменении угла тангажа по заданной программе и в отделении отработавших боковых блоков ([1], стр.59, 61, 62).
Недостатком известного способа является трудность в его реализации в случае когда плоскость I-III РКН не является ее плоскостью симметрии на участке полета до отделения боковых блоков (ББ). Такая ситуация имеет место для ракет типа РКН среднего класса «Ангара-3A» с двумя ББ, входящей в состав семейства РКН «Ангара» ([2], стр.91). Эта РКН получается из РКН тяжелого класса «Ангара-5А» с четырьмя ББ путем удаления двух ББ, расположенных по диагонали (см. фиг.1, 2). У РКН «Ангара-3А» плоскость I-III составляет углы, равные 45°, с обеими плоскостями симметрии. Применение известного способа выведения к такой РКН приведет к существенной взаимосвязи каналов тангажа и рыскания системы управления (СУ), что крайне нежелательно на атмосферном участке полета, так как потребует большого объема расчетных и экспериментальных работ по определению аэродинамических характеристик РКН, разработки принципиально новой динамической схемы пространственного движения РКН, создания алгоритмов управления взаимосвязанным движением РКН по тангажу и рысканию с одновременным ограничением аэродинамических нагрузок и др.
Задачей предложенного изобретения является разработка способа выведения на орбиту, обеспечивающего с учетом ограничений, накладываемых кинематикой трехстепенной гиростабилизированной платформы (ГСП), полет в плотных слоях атмосферы с отработкой программы тангажа в плоскости симметрии РКН, что позволяет сделать независимыми каналы тангажа и рыскания СУ.
Техническими результатами предлагаемого изобретения является минимизация затрат на разработку алгоритмов управления СУ для семейства РКН с несколькими боковыми блоками, а также унификация аппаратуры СУ и ее размещения на РКН для всех ракет семейства.
Указанные технические результаты достигаются тем, что в способе выведения на орбиту ракеты космического назначения пакетной схемы на участке полета до отделения боковых блоков, заключающемся в старте ракеты, в выполнении программного разворота по крену на соответствующий азимуту прицеливания начальный угол γ0 для совмещения плоскости I-III с заданным азимутом прицеливания, в изменении угла тангажа по заданной программе и в отделении отработавших боковых блоков, в соответствии с изобретением, в случае выведения ракеты, у которой плоскость I-III образует углы по 45° с плоскостями симметрии, программный разворот ракеты по крену выполняют в 2 этапа, а именно через 5-10 с после старта выполняют разворот ракеты по крену на угол γ0 - 45°, а при достижении углом тангажа значения, являющегося предельно допустимым с учетом ограничений, накладываемых кинематикой ГСП, выполняют разворот ракеты по крену на угол 45° до совмещения плоскости I-III с заданным азимутом прицеливания.
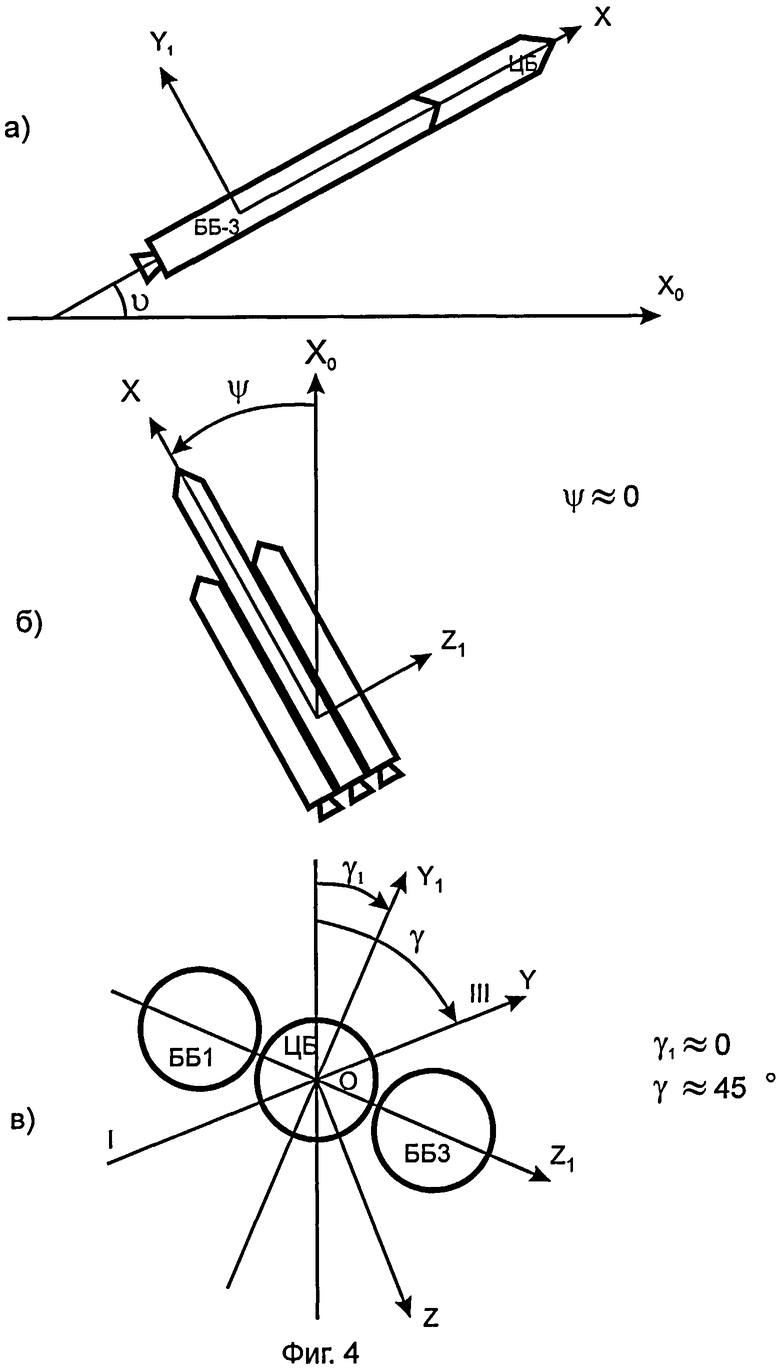
Сущность предлагаемого изобретения иллюстрируется фиг.1-4, где на фиг.1 показана РКН с четырьмя ББ на старте (вид сверху); на фиг.2 - РКН с двумя ББ на старте (вид сверху); на фиг.3 - схема расположения рамок ГСП; на фиг.4 - угловое положение РКН на участке полета в плотных слоях атмосферы: а) в плоскости тангажа (вид сбоку), б) в плоскости рыскания (вид сверху)в) в плоскости крена (вид сзади).
Известный способ выведения на орбиту применяется для РКН, у которых плоскость I-III является ее плоскостью симметрии (например, как на фиг.1.). После старта такая РКН совершает программный разворот по крену для совмещения плоскости I-III с вертикальной плоскостью выведения, составляющей с меридианом угол, равный азимуту прицеливания. В дальнейшем движении до отделения ББ система управления РКН в соответствии с известным способом выведения отрабатывает программу изменения угла тангажа в плоскости выведения.
Для более подробного описания известного способа выведения введем в рассмотрение две системы координат: начальную стартовую (НССК) и связанную (ССК). Начало НССК O0 находится в центре Земли, ось O0Y0 параллельна линии отвеса, проходящей через центр масс установленной на старте РКН, и направлена в сторону носа РКН, ось О0Х0 перпендикулярна оси O0Y0, лежит в плоскости выведения и направлена в сторону пуска (т.е. образует с направлением на Север угол, равный азимуту прицеливания), ось O0Z0 дополняет НССК до правой прямоугольной. Направление осей НССК фиксируется в момент старта РКН и в дальнейшем остается неизменным в инерциальном пространстве.
Начало ССК O находится в центре масс РКН, ось OX параллельна продольной оси РКН, ось OY параллельна плоскости I-III и направлена в сторону III полуплоскости, ось OZ дополняет СК до правой прямоугольной.
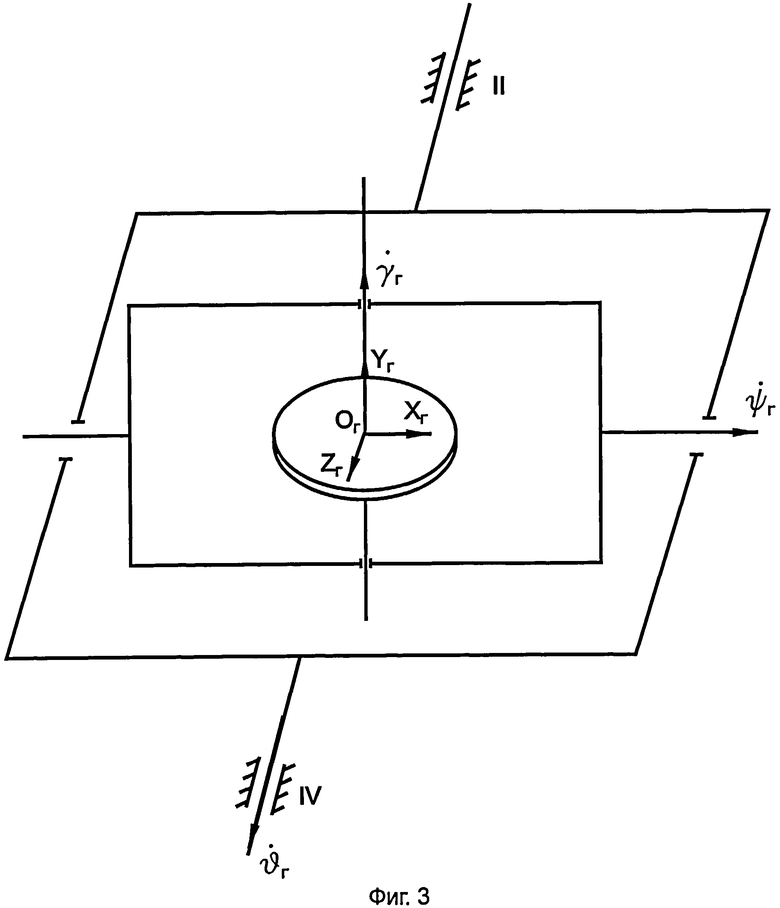
Угловое движение РКН характеризуется положением ССК относительно НССК и описывается тремя углами: тангажа ϑ, рыскания Ψ и крена γ (переход от НССК к ССК осуществляется путем последовательных поворотов на эти углы в указанном порядке). На борту РКН используемая в отечественной практике трехстепенная ГСП измеряет углы поворота рамок γГСП, ψГСП, ϑГСП (см. Фиг.3), связанные с углами ϑ, ψ, γ соотношениями:





ГСП реализует на борту РКН приборную систему координат OпрXпрYпрZпр оси которой в каждый момент времени параллельны осям НССК и одинаково направлены с ними. При этом ось внешней (тангажной) рамки ГСП всегда перпендикулярна плоскости I-III РКН.
Ось OY установленной на пусковом устройстве РКН образует с плоскостью выведения угол γ0, поэтому при использовании известного способа выведения через 5-10 с после старта осуществляется программный разворот РКН по крену на угол γ0. При этом плоскость OXY совмещается с плоскостью выведения O0X0Y0. В дальнейшем до отделения ББ СУ РКН отрабатывает заданную по времени программу изменения угла тангажа, обеспечивая выполнение условий:
ϑ=ϑпр(t); ψ≈0; γ≈0.
При этом каналы тангажа, рыскания и крена СУ являются независимыми, что является необходимым условием для разработчика СУ. Это связано с тем, что плоскость выведения является плоскостью геометрической (а следовательно, и аэродинамической) симметрии на участке полета в плотных слоях атмосферы. В частности, отклоняя камеры двигателей в плоскости I-III (по тангажу), можно управлять углом атаки без создания угла скольжения, а отклоняя камеры двигателей в плоскости II-IV (по рысканию) - управлять углом скольжения без создания угла атаки.
Конструкция используемой на российских ракетах ГСП допускает любые значения измеряемых ею углов γГСП и ϑГСП. Однако на угол отклонения промежуточной рамки ГСП ψГСП наложено ограничение:  (обычно
(обычно  ), при нарушении которого рамки ГСП «складываются» и дальнейший управляемый полет становится невозможным. При использовании известного способа выведения из условий ψ≈0; γ≈0 следует ψГСП≈0.
), при нарушении которого рамки ГСП «складываются» и дальнейший управляемый полет становится невозможным. При использовании известного способа выведения из условий ψ≈0; γ≈0 следует ψГСП≈0.
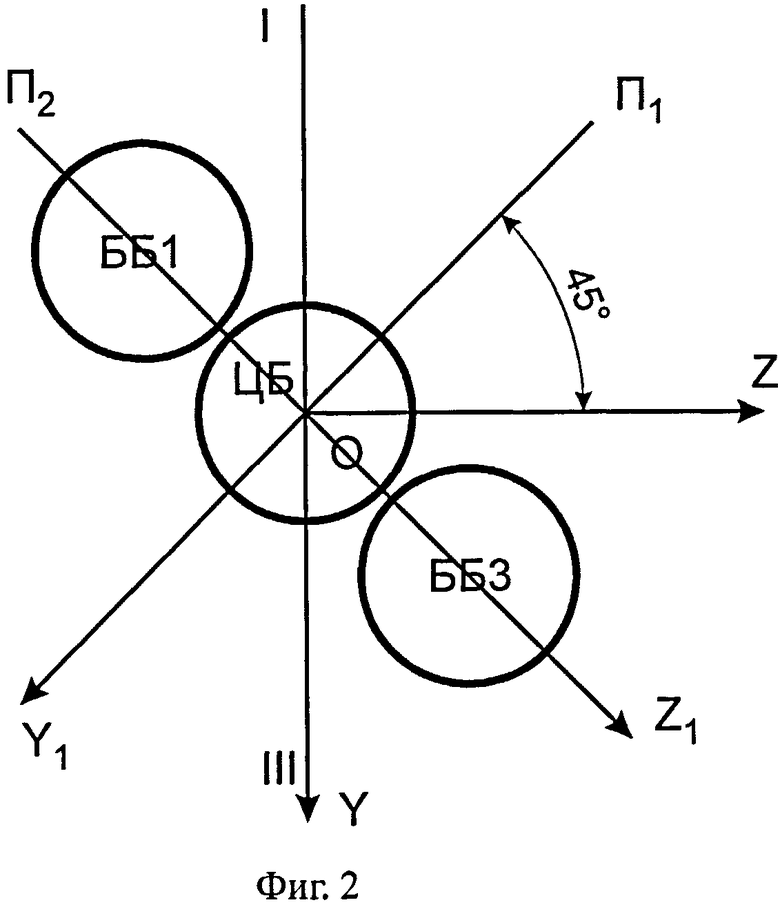
В случае выведения РКН типа «Ангара-«3A», когда плоскость I-III образует углы по 45° с плоскостями симметрии, в соответствии с предлагаемым в изобретении способом выведения через 5…10 с после старта РКН осуществляется первый этап программного разворота по крену на угол γ0 - 45°. При этом одна из плоскостей симметрии РКН П1 совмещается с плоскостью выведения. Для описания движения РКН в этом случае целесообразно наряду со связанной СК ввести в рассмотрение связанную-1 систему координат (ССК-1) OXY1Z1, оси OY1 и OZ1 которой параллельны плоскостям симметрии П1 и П2 соответственно (см. фиг.2). Угловое положение ССК-1 относительно НССК и описывается тремя углами: тангажа ϑ, рыскания Ψ и крена-1 γ1=γ - 45°. При полете в плотных слоях атмосферы угол γ1 для ракеты типа «Ангара-3A» играет ту же роль, что и угол γ для РКН типа «Ангара-5А». После завершения первого этапа программного разворота по крену РКН типа «Ангара-3A» будет иметь угол γ1≈0. В дальнейшем СУ осуществляет отработку программы тангажа, обеспечивая выполнение условий ϑ=ϑпр(t); ψ≈0; γ1≈0 (γ≈45°). При этом каналы тангажа, рыскания и крена СУ остаются независимыми, так как плоскость выведения практически совпадает с плоскостью симметрии РКН. Угловое положение РКН типа «Ангара-3A» на участке полета в плотных слоях атмосферы показано на фиг.4.
В процессе дальнейшего полета с углом крена γ≈45°по мере уменьшения угла тангажа (увеличивается угол отклонения промежуточной рамки ГСП ψГСП. Это связано с тем, что в целях унификации конструкции ракет семейства «Ангара» ГСП устанавливается таким образом, что ось внешней (тангажной) рамки ГСП на всех РКН семейства устанавливается перпендикулярно плоскости I-III. Такая установка оси внешней рамки является также необходимым условием для нормального продолжения управляемого полета после отделения боковых блоков. В связи с необходимостью предотвратить «складывание» рамок ГСП при достижении углом ψГСП своего предельно-допустимого значения  , в соответствии с изобретением осуществляется второй этап программного разворота по крену на угол 45°. Этот этап начинается, когда угол тангажа (достигнет своего предельно-допустимого значения ϑmin, величина которого рассчитывается из первого уравнения системы (1) при ψ=0; γ=45°:
, в соответствии с изобретением осуществляется второй этап программного разворота по крену на угол 45°. Этот этап начинается, когда угол тангажа (достигнет своего предельно-допустимого значения ϑmin, величина которого рассчитывается из первого уравнения системы (1) при ψ=0; γ=45°:  Положив (с запасом)
Положив (с запасом)  получим ϑmin=45°. На типовой траектории выведения РКН «Ангара-3A» это значение угла тангажа соответствует ≈125 с полета от команды КП, когда скоростной напор составляет ≈400 кгс/м2 и в дальнейшем уменьшается до 0. Второй этап программного разворота на угол 45° целесообразно «растянуть» по времени, закончив его к моменту отделения ББ (≈207 с полета). При этом зависимость от времени программного угла крена, для которой угол отклонения промежуточной рамки ψГСП не превышает своего максимально допустимого значения
получим ϑmin=45°. На типовой траектории выведения РКН «Ангара-3A» это значение угла тангажа соответствует ≈125 с полета от команды КП, когда скоростной напор составляет ≈400 кгс/м2 и в дальнейшем уменьшается до 0. Второй этап программного разворота на угол 45° целесообразно «растянуть» по времени, закончив его к моменту отделения ББ (≈207 с полета). При этом зависимость от времени программного угла крена, для которой угол отклонения промежуточной рамки ψГСП не превышает своего максимально допустимого значения  имеет вид:
имеет вид:  .
.
К моменту отделения ББ РКН будет иметь угол крена γ=0, что необходимо для нормального продолжения полета.
Источники информации
1. Ю.Г.Сихарулидзе. Баллистика летательных аппаратов. М., «Наука», 1982 г.
2. С.П.Уманский. Ракеты-носители. Космодромы. М., «Рестарт+», 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономной навигации для объекта космического назначения | 2018 |
|
RU2727784C2 |
| СПОСОБ БЕЗОПАСНОГО СТАРТА РАКЕТЫ С МНОГОДВИГАТЕЛЬНОЙ ПЕРВОЙ СТУПЕНЬЮ | 2011 |
|
RU2481251C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ ПОДАВЛЕНИЯ УПРУГИХ КОЛЕБАНИЙ КОНСТРУКЦИИ РАКЕТЫ ПАКЕТНОЙ СХЕМЫ | 2011 |
|
RU2474517C2 |
| СПОСОБ ЗАЩИТЫ СТАРТОВЫХ СООРУЖЕНИЙ ОТ ГАЗОДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ СТРУЙ ДВИГАТЕЛЕЙ РАКЕТЫ | 2009 |
|
RU2407680C1 |
| СПОСОБ ЗАЩИТЫ ОТ АВАРИИ МНОГОКАНАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ | 2012 |
|
RU2521117C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| СПОСОБ СПУСКА УСКОРИТЕЛЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ В ПОСАДОЧНУЮ ЗОНУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043954C1 |
| СПОСОБ СТАРТА РАКЕТЫ С САМОЛЕТА ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ОРБИТУ | 2008 |
|
RU2394201C2 |
| Способ терминального наведения баллистической ракеты на активном участке траектории при наличии ошибки прицеливания | 2024 |
|
RU2832575C1 |
Изобретение относится к ракетно-космической технике и может быть использовано в ракетах космического назначения (РКН) пакетной схемы. На участке полета до отделения боковых блоков выполняют программный разворот по крену на соответствующий азимуту прицеливания начальный угол для совмещения соответствующих плоскостей с заданным азимутом прицеливания, изменяют угол тангажа по заданной программе, отделяют отработавшие боковые блоки. В случае выведения ракеты, у которой соответствующие плоскости образуют углы по 45° с плоскостями симметрии, программный разворот ракеты по крену выполняют в 2 этапа, а именно через 5-10 с после старта выполняют разворот ракеты по крену на угол 45°, а при достижении углом тангажа предельно допустимого значения с учетом ограничений, накладываемых кинематикой гиростабилизированной платформы, выполняют разворот ракеты по крену на угол 45° до совмещения соответствующей плоскости с заданным азимутом прицеливания. Изобретение позволяет унифицировать аппаратуру системы управления и ее размещение на РКН. 4 ил.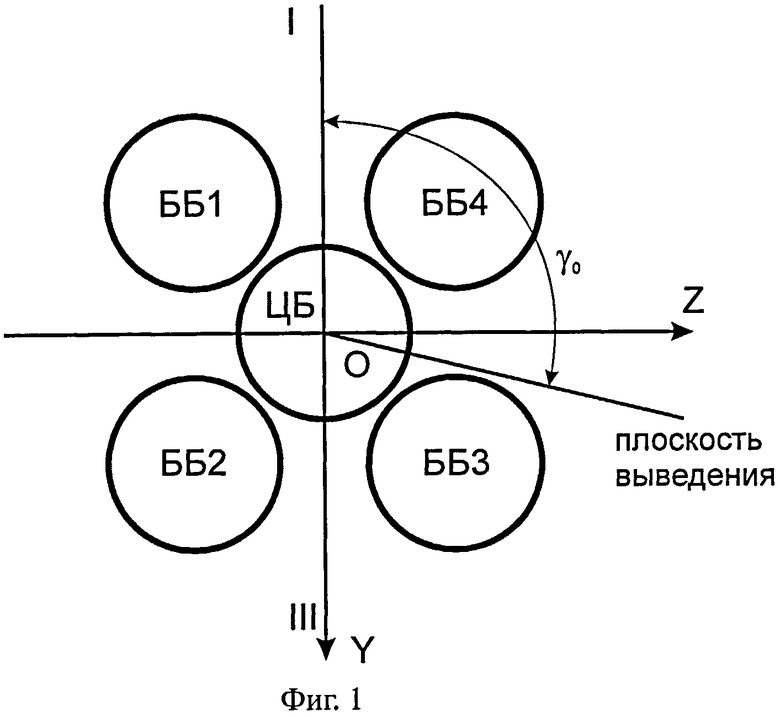
Способ выведения на орбиту ракеты космического назначения пакетной схемы на участке полета до отделения боковых блоков, заключающийся в старте ракеты, в выполнении программного разворота по крену на соответствующий азимуту прицеливания начальный угол γ0 для совмещения плоскости I-III с заданным азимутом прицеливания, в изменении угла тангажа по заданной программе и в отделении отработавших боковых блоков, отличающийся тем, что в случае выведения ракеты, у которой плоскость I-III образует углы по 45° с плоскостями симметрии, программный разворот ракеты по крену выполняют в 2 этапа, а именно через 5-10 с после старта выполняют разворот ракеты по крену на угол γ0 - 45°, а при достижении углом тангажа значения, являющегося предельно-допустимым с учетом ограничений, накладываемых кинематикой гиростабилизированной платформы, выполняют разворот ракеты по крену на угол 45° до совмещения плоскости I-III с заданным азимутом прицеливания.
| Сихарулидзе Ю.Г | |||
| Баллистика летательных аппаратов | |||
| - М.: Издательство "Наука", 1982, с.59, 61, 62 | |||
| Уманский С.П | |||
| Ракеты-носители | |||
| Космодромы | |||
| - М.: Издательство "Рестарт+", 2001, с.91 | |||
| СПОСОБ ВЫВЕДЕНИЯ НА ОРБИТУ ПОЛЕЗНОЙ НАГРУЗКИ МНОГОФУНКЦИОНАЛЬНОЙ РАКЕТОЙ-НОСИТЕЛЕМ КОМБИНИРОВАННОЙ СХЕМЫ С МАРШЕВЫМИ ЖИДКОСТНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЬНЫМИ УСТАНОВКАМИ (ЖРДУ), МНОГОФУНКЦИОНАЛЬНАЯ РАКЕТА-НОСИТЕЛЬ КОМБИНИРОВАННОЙ СХЕМЫ С МАРШЕВЫМИ ЖРДУ И СПОСОБ ЕЕ ОТРАБОТКИ | 2000 |
|
RU2161108C1 |

