Изобретение относится к ракетно-космической технике, а именно к ракетам космического назначения (РКН).
В ракетной технике известны способы старта ракеты с многодвигательной первой ступенью, исключающей соударение ракеты с элементами стартовых сооружений.
Известен способ старта ракеты «Энергия-Буран» с многодвигательной установкой, обеспечивающей старт и полет на участке совместной работы двигателей I и II ступеней, с отводом площадки подпитки ракеты жидким водородом в момент старта ракеты [1] (стр.123-129) для обеспечения безударности. Недостаток способа - сложная конструкция отвода и необходимость обеспечения ее высокой надежности.
Известен способ старта ракеты «Восток», заключающийся в запуске двигателей многодвигательной установки I ступени, подъеме ракеты с исключением соударения с элементами стартового комплекса (СК) вблизи ракеты, а именно включающей отвод стартовых опор и кабель-заправочных мачт на безопасный угол от ракеты при ее подъеме [1] (стр.123-129). Недостаток способа - конструктивная сложность механизмов увода элементов СК и большая стоимость.
Известен способ старта ракеты «Ares I-X» [3] (стр.29-32) с одним маршевым двигателем, заключающийся в выполнении штатного маневра ухода от стартовых сооружений для обеспечения безударности ракеты с наиболее близко расположенными элементами СК за счет программного управления ракетой в канале тангажа. Недостаток способа - маневр уклонения не согласован с требованием минимизации газодинамических (силовых и тепловых) нагрузок струи двигателя ракеты на сооружения СК (основание башни обслуживания). Решение этой задачи невозможно при управлении ракетой только в одном канале.
С другой стороны, известны способы уменьшения газодинамического воздействия [4, 5] на сооружения СК за счет штатного управляемого маневра увода струй двигателей в заданном секторе на плоскости основных сооружений. Недостаток указанных способов в том, что маневр увода струй двигателей не согласован с требованием обеспечения безударности ракеты с элементами СК, особенно - в аварийном случае при отказе двигателя в многодвигательной ракете на участке старта.
Наиболее близким по технической сущности к предлагаемому способу является выбранный в качестве прототипа способ безопасного старта ракеты с многодвигательной первой ступенью [2], заключающийся в выполнении маневра увода аварийной ракеты, при невзрывном отказе одного из двигателей, за счет разворота ракеты в сторону от сооружений стартового комплекса по заранее введенной в систему управления аварийной программе угла тангажа.
Недостатками этого способа являются:
- Неполное использование маневренных возможностей ракеты, а именно - только в каналах крена и/или тангажа. Это не позволяет реализовать расширенный класс траекторий увода, в котором может находиться направление минимального ущерба сооружениям стартового комплекса (СК) при падении аварийной ракеты. Разворот аварийной ракеты по крену до 90 град позволяет уводить ее в предельном случае только параллельно плоскости основных конструкций кабель-заправочной башни (КЗБ) (или кабель-мачты (КМ)), что может быть не выгодно с точки зрения минимизации ущерба сооружениям СК. Разворот же аварийной ракеты в канале крена до 180 град позволяет расширить класс траекторий увода, но требует увеличения времени на разворот, что может вступить в противоречие с безударностью движения ракеты с элементами СК и, как следствие, к необходимости расположения этих конструкции на большом удалении от ракеты, что приведет к увеличению веса конструкций и их стоимости.
- Отсутствие независимой проверки отказа двигателя по характерным параметрам движения ракеты помимо бортовой аппаратурной диагностики двигателей. Решение об аварийном выключении двигателей только по информации от аппаратуры диагностики двигателей может привести к потере ракеты из-за ложного срабатывания аппаратурных датчиков.
- Направление аварийного увода ракеты не согласовано с требованием минимизации газодинамического воздействия струй двигателей на наиболее нагруженные элементы СК - газохода, КЗБ (и/или КМ). Необходимость этого показана при первом полете первого «Ареса» ([3], стр.32), при пусках ракеты «Зенит-3 SL» с плавучей платформы [5] (стр.3-14), а также - в патенте [4].
Задачей предлагаемого изобретения является разработка безопасного способа старта многодвигательной ракеты при невзрывном отказе одного «i»-го двигателя (i=l, 2, …, n - число двигателей), не вышедшего на полную тягу на основе реализации системой управления комбинированного маневра увода аварийной ракеты в сторону от сооружений СК с использованием штатной программы управления углами тангажа и рыскания при отсутствии отказа двигателя и набора из «n» аварийных программ этих углов - при наличии отказа обеспечивающих требования безударности движения и уменьшение газодинамического воздействия струй двигателей на сооружения СК с падением аварийной ракеты в одно из двух полей падения в зоне космодрома в зависимости от момента времени независимого от датчиков диагностики двигателей определения отказа двигателя.
Техническими результатами предлагаемого изобретения являются:
- Упрощение конструкции сооружений СК и отводимых элементов с уменьшением их стоимости.
- Безопасность эксплуатации и повышение ресурса основных сооружений СК при штатном и аварийном старте ракеты.
- Сохранение ракеты, когда отказ двигателя по датчикам бортовой диагностики не подтверждается независимой идентификацией отказа по характерным параметрам движения.
Технический результат в способе безопасного старта ракеты с многодвигательной первой ступенью, заключающемся в выполнении маневра увода аварийной ракеты, при невзрывном отказе одного из двигателей, за счет разворота ракеты в сторону от сооружений стартового комплекса по заранее введенной в систему управления аварийной программе угла тангажа, в соответствии с изобретением достигается тем, что в систему управления вводят до полета штатную программу углов тангажа и рыскания и набор аварийных программ по этим углам по числу двигателей (i=l, 2, …, n) и двум полям падения в зоне космодрома, обеспечивающим требования безударности и уменьшение воздействия струй двигателей на стартовые сооружения, а в полете с помощью системы управления вычисляют координаты мгновенной точки падения ракеты на земную поверхность, затем - определяют отказ «i»-го двигателя, не вышедшего на полную тягу по интегральному критерию по характерным параметрам движения ракеты независимо от показаний датчиков бортовой диагностики двигателей, и при наличии отказа «i»-го двигателя выбирают первое или второе поле падения в зависимости от времени определения отказа и соответствующую аварийную программу углов тангажа и рыскания и осуществляют маневр увода ракеты от сооружений стартового комплекса по выбранной программе углов, затем - выключают отказавший двигатель при совпадении номера «i» по параметрам движения независимого интегрального критерия ракеты и показаниям датчика диагностики и выключают работающие двигатели при условии принадлежности координат мгновенной точки падения выбранному полю с падением ракеты в это поле, а при отсутствии отказа двигателя осуществляют полет по штатной программе углов тангажа и рыскания.
Положительный эффект предлагаемого изобретения достигается за счет:
- Управления ракетой в каналах тангажа и рыскания по набору соответствующих программ, вводимых в систему управления до полета, и позволяющих осуществить комбинированный маневр увода ракеты с обеспечением условий безударности с сооружениями СК как в аварийном (с отказом «i»-го двигателя) случае с приведением ракеты в одно из двух полей падения в зоне космодрома, так и при штатном старте без отказа двигателя. В последнем случае реализуется маневр увода струй в заданном секторе [4].
- Независимого определения системой управления отказа «i»-го двигателя по интегральному критерию по характерным параметрам движения ракеты. Это позволяет распознать ложный сигнал отказа двигателя по датчикам системы диагностики.
Новизна предлагаемого изобретения состоит в следующем:
1. Независимое от бортовой диагностики работоспособности двигателей определение отказа «i»-го двигателя, не вышедшего на полную тягу, осуществляется в системе управления (СУ) по интегральному критерию по характерным измеренным (вычисленным) в текущий момент времени t параметрам движения ракеты: a) nx(f) - продольной перегрузки; б) (Vxc(t), Vzc(t)) - проекциям земной скорости на оси OXC и OZC нормальной стартовой системы координат в горизонтальной плоскости (фиг.1).
С помощью системы управления анализируют:
- выход nx(t) за нижнее n- x(t) значение для установления факта отказа двигателя;
- отклонение текущих значений (Vxc(t), Vzc(t)) от допустимых (сверху, снизу) значений (Vxc(t), Vzc(t)) для установления отказа двигателя в боковых блоках (ББ);
для установления отказа двигателя в боковых блоках (ББ);
- принадлежность текущих значений (Vxc(t), Vzc(t)) допустимым значениям (Vxc(t), Vzc(t)) для установления отказа двигателя в центральном блоке (ЦБ);
для установления отказа двигателя в центральном блоке (ЦБ);
- знаки текущих значений Vxc, Vzc после выхода их за допустимые значения (Vxc(t), Vzc(t)) для установления номера отказавшего двигателя в боковом блоке (ББ).
для установления номера отказавшего двигателя в боковом блоке (ББ).
Зависимости n (t), (Vxc(t), Vzc(t))
(t), (Vxc(t), Vzc(t)) вводятся в СУ перед полетом.
вводятся в СУ перед полетом.
2. Комбинированный маневр увода ракеты осуществляется СУ по набору программ управления углами тангажа (ϑ) и рыскания (Ψ) для штатного и аварийного полета с отказом двигателя. Эти программы обеспечивают условия безударности движения ракеты с гарантированными зазорами безопасности между любой точкой ракеты и сооружениями СК и требование ослабления газодинамического воздействия струй двигателей на основные сооружения СК. Этот маневр включает в себя:
- маневр увода струй двигателей ракеты в заданном направлении по штатным программам углов (ϑпр(t), Ψпр(t)) по аналогии с [4];
- маневр аварийного увода ракеты с отказом «i»-го двигателя (после или в процессе выполнения в первой фазе маневра увода струй двигателей) по аварийной программе углов тангажа и рыскания (ϑK np.ав.i(t), ΨK np.ав.i(t)) для «i»-го двигателя с уводом ее в направлении минимального ущерба сооружениям СК в первое поле падения (К=1) при ранней по времени идентификации отказа двигателя, или в плоскости полета во второе поле падения (К=2) - при поздней идентификации отказа; оба поля падения находятся в зоне космодрома.
Сущность предлагаемого изобретения поясняется чертежами, где на фиг.1-11 представлены результаты математического моделирования движения гипотетической РКН с пятью двигателями в составе первой ступени на стартовом участке. Ракета как объект управления рассматривается как замкнутая динамическая система «модель движения РКН+алгоритмы управления». Для расчетов использованы модельные алгоритмы навигации, наведения и угловой стабилизации.
На фиг.1 показано положение гипотетической РКН с пятью двигателями (по одному двигателю в каждом блоке) в составе первой ступени при виде сверху на пусковое устройство. Показана плоскость полета по оси ОХС начальной стартовой системы координат (НССК), направление увода струй двигателей в штатном и аварийном полете, а также - направления безопасного увода (на «север») и в плоскости полета, в котором расположены первое и второе поле падения в зоне космодрома.
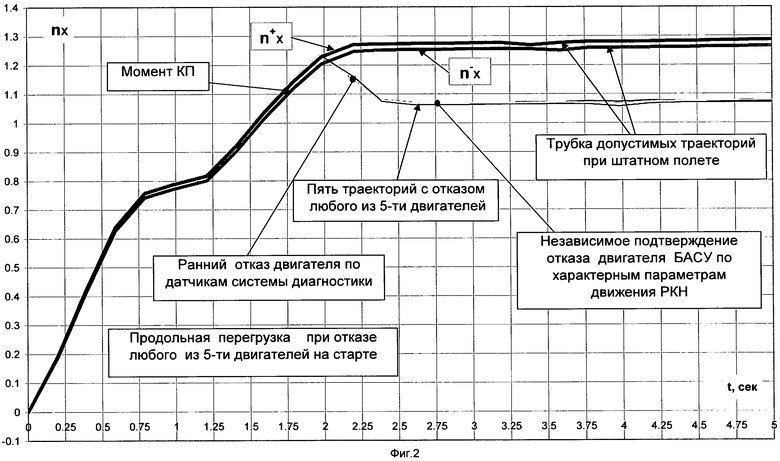
На фиг.2 представлено:
- изменение по времени полета продольной перегрузки nx(t) на нескольких траекториях в штатном и аварийном полете с отказом одного двигателя в блоках ББ и ЦБ;
- диапазон допустимых зависимостей  для штатного полета, определяемый действием расчетных возмущающих факторов;
для штатного полета, определяемый действием расчетных возмущающих факторов;
- момент контакта подъема «КП», начиная с которого БАСУ формирует команды управления на исполнительные органы отклоняемых двигателей для создания управляющих сил и моментов;
- момент идентификации раннего отказа на t=2.23 секунды одного из двигателей для пяти траекторий (с отказом двигателя в любом из пяти блоков) средствами системы диагностики работоспособности двигателей;
- момент t=2.75 секунды подтверждения отказа одного из двигателей в любом из пяти блоков по независимому интегральному критерию по характерным параметрам движения.
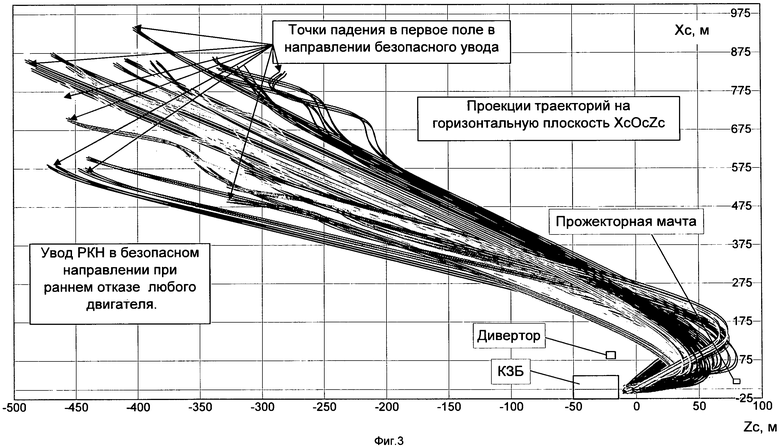
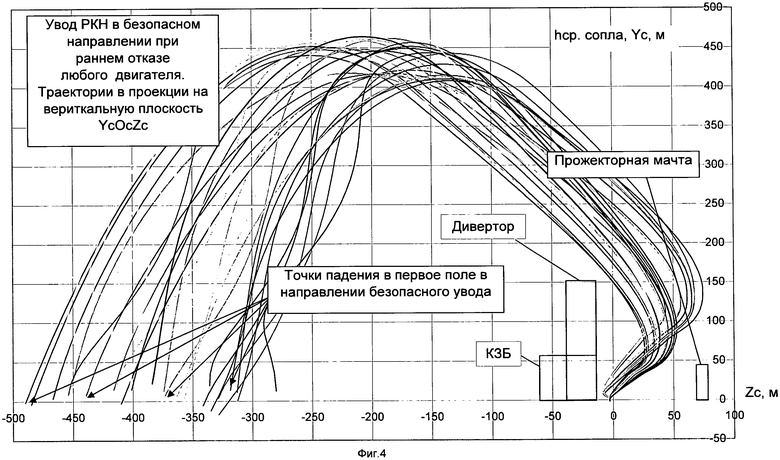
На фиг.3, 4 представлены результаты:
- статистического расчета аварийных траекторий в проекции на горизонтальную (XcOcZc) и вертикальную (YcOcZc) плоскости соответственно, на каждой из которых при учете полного состава возмущающих факторов моделировался случайный отказ одного из двигателей в четырех ББ или в ЦБ;
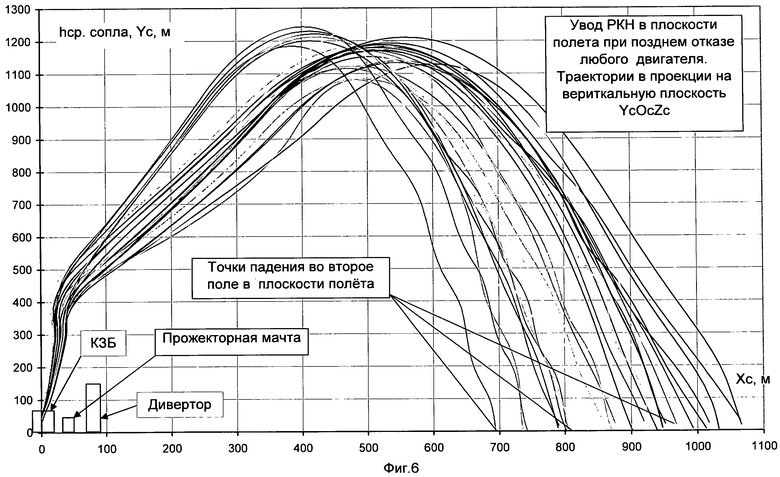
- стартовые сооружения - кабель-заправочная башня (КЗБ), дивертор и прожекторная мачта;
- точки падения аварийной ракеты при раннем отказе с независимым подтверждением отказа по интегральному критерию СУ по характерным параметрам движения с реализацией увода ракеты в первое поле падения (К=1) в зоне космодрома после выключения работающих двигателей в момент попадания прогнозируемой мгновенной точки падения в это поле. Видно, что выбранные для управления в момент подтверждения отказа t=2.75 секунды аварийные зависимости углов тангажа и рыскания (ϑпр.ав.i, Ψпр.ав.i) обеспечивают безударное движение ракеты в горизонтальной и вертикальной плоскостях с элементами СК с обеспечением гарантированных зазоров безопасности с этими сооружениями. Для этой цели просматривались все крайние точки ракеты.
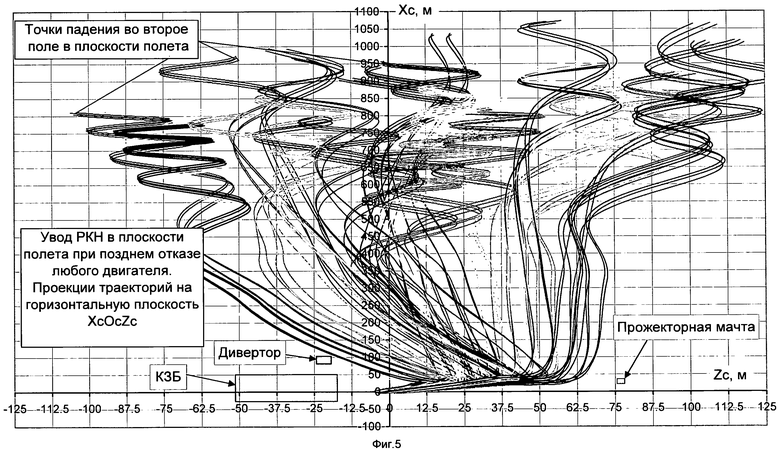
На фиг.5, 6 представлены аналогичные траектории в проекции на горизонтальную и вертикальную плоскости соответственно для случая позднего отказа в момент 15 секунды полета с падением аварийной ракеты во второе поле (К=2) в плоскости полета.
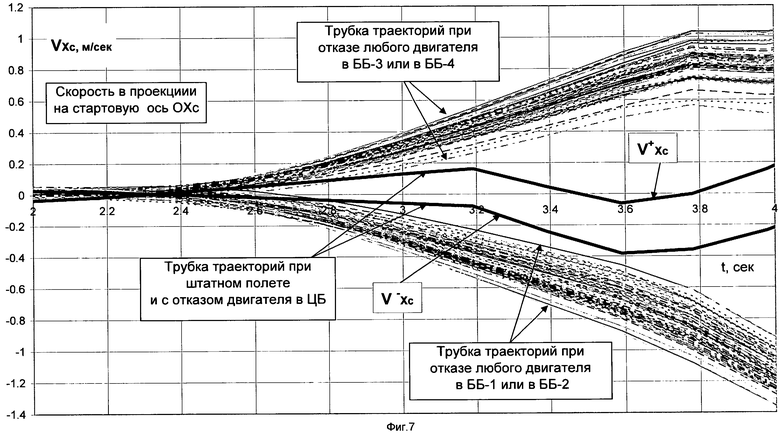
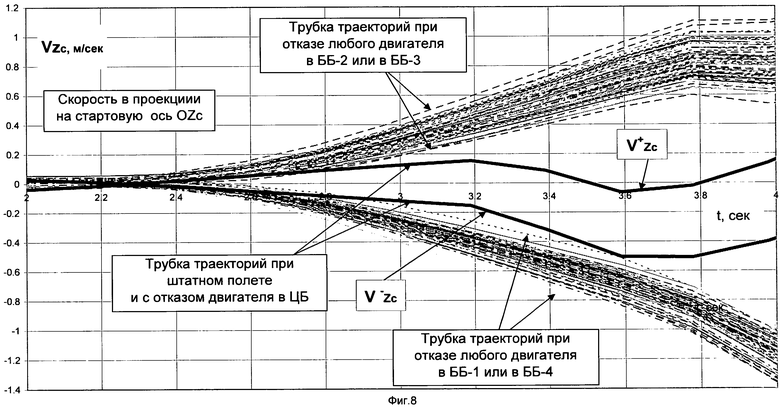
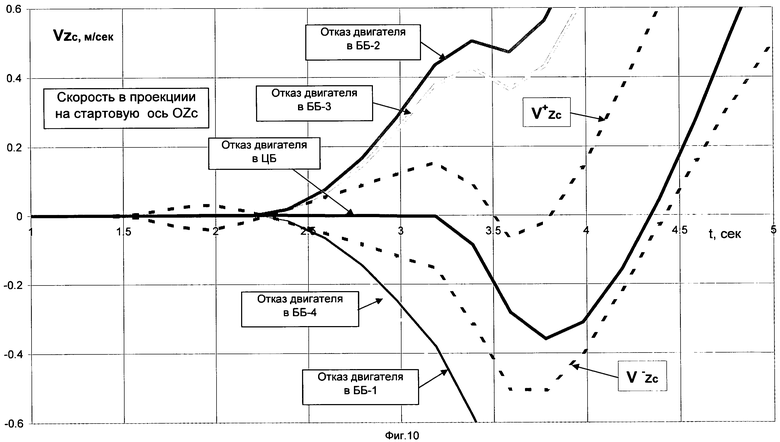
На фиг.7, 8 по результатам статистического (с выборкой 200 траекторий) моделирования представлены зависимости по времени (Vxc, Vzc) проекций вектора земной скорости на оси OXc и OZc в горизонтальной плоскости начальной стартовой системы координат (НССК) (фиг.1), а именно:
- (Vxc, Vzc) допустимые сверху и снизу зависимости для штатного полета без отказа двигателя,
допустимые сверху и снизу зависимости для штатного полета без отказа двигателя,
- трубки траекторий при отказе одного двигателя в блоках ББ-1, -2, -3, 4.
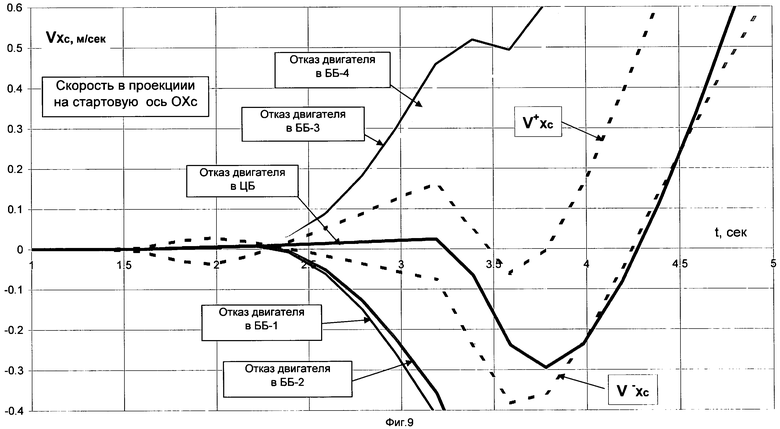
На фиг.9, 10 представлены аналогичные зависимости с моделированием пяти траекторий с отказом одного двигателя в блоках ББ-1, -2, -3, -4 и ЦБ. Видно, что в момент t=2.75 секунды на любой из траекторий с отказом одного двигателя в ББ наблюдается устойчивый выход параметров (Vxc, Vzc) за допустимые значения (Vxc, Vzc) , что однозначно определяет факт отказа. Так как отказ двигателя в ЦБ не создает поперечных уводящих сил и моментов, то он идентифицируется по факту невыхода на некотором интервале времени параметров (Vxc, Vzc) из штатной трубки траекторий (Vxc, Vzc)
, что однозначно определяет факт отказа. Так как отказ двигателя в ЦБ не создает поперечных уводящих сил и моментов, то он идентифицируется по факту невыхода на некотором интервале времени параметров (Vxc, Vzc) из штатной трубки траекторий (Vxc, Vzc) Номер отказавшего двигателя в любом ББ устанавливается на основе анализа знаков параметров (Vxc, Vzc). К примеру, если происходит отказ двигателя в ББ-1, то уводящий поперечный момент от ББ-3 дает отрицательное значение (Vxc) и отрицательное значение (Vzc). Если происходит отказ двигателя в ББ-4, то уводящий поперечный момент от ББ-2 дает положительное значение (Vxc) и отрицательное значение (Vzc).
Номер отказавшего двигателя в любом ББ устанавливается на основе анализа знаков параметров (Vxc, Vzc). К примеру, если происходит отказ двигателя в ББ-1, то уводящий поперечный момент от ББ-3 дает отрицательное значение (Vxc) и отрицательное значение (Vzc). Если происходит отказ двигателя в ББ-4, то уводящий поперечный момент от ББ-2 дает положительное значение (Vxc) и отрицательное значение (Vzc).
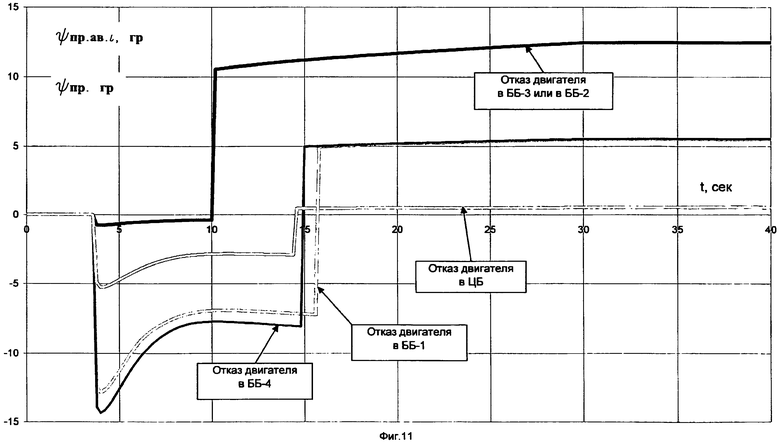
На фиг.11 представлены соответствующие этим аварийным ситуациям программные зависимости углов рыскания (Ψпр.ав.i). В канале тангажа эти зависимости аналогичны. Для штатного случая ((Ψпр) без отказа двигателя эти зависимости совпадают с ЦБ на фиг.11.
Благодаря предлагаемому изобретению в способе безопасного старта ракеты с многодвигательной первой ступенью обеспечивается:
- Упрощение конструкции сооружений СК и отводимых элементов с уменьшение их стоимости, а также - безопасность эксплуатации СК при аварийном старте ракеты с отказом одного двигателя не вышедшего на полную тягу.
- Повышение ресурса основных сооружений СК до капитального ремонта.
- Повышение надежности выключения СУ отказавшего двигателя при старте ракеты за счет независимой от датчиков бортовой диагностики идентификации отказа двигателя на основе характерных интегральных параметров движения ракеты.
- Сохранение ракеты, если отказ двигателя по датчикам бортовой диагностики является ложным и не подтверждается независимой идентификацией отказа по характерным параметрам движения.
Источники информации
1. С.Уманский. Ракеты-носители. Космодромы. М.: Издательство «Рестар+». 2001 г. Стартовые комплексы конструкторского бюро общего машиностроения.
2. Дермичев Г.Д., Перепелицкий Г.Н. Способ старта ракеты. Патент РФ №2170194, кл. B64G 1/00, -1/24, -1/52 от 10.07.2001 г.
3. Новости космонавтики. Журнал. №12, 2009 г.
4. Володин В.Д., Соломаха С.Г. и др. Способ защиты стартовых сооружений от газодинамического воздействия струй двигателей ракеты. Патент РФ №240780 от 2010 г., заявка 2009125704 от 08.07.2009 г.
5. В.П.Легостаев «Старт с поверхности океана». Журнал «Полет», №2, 1999 г. (стр.3-14).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАРТА РАКЕТЫ | 2010 |
|
RU2446081C1 |
| СПОСОБ ЗАЩИТЫ СТАРТОВЫХ СООРУЖЕНИЙ ОТ ГАЗОДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ СТРУЙ ДВИГАТЕЛЕЙ РАКЕТЫ | 2009 |
|
RU2407680C1 |
| СПОСОБ СТАРТА РАКЕТЫ | 2000 |
|
RU2170194C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ ВЫВЕДЕНИЯ НА ОРБИТУ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ПАКЕТНОЙ СХЕМЫ НА УЧАСТКЕ ПОЛЕТА ДО ОТДЕЛЕНИЯ БОКОВЫХ БЛОКОВ | 2011 |
|
RU2481247C1 |
| СПОСОБ ПУСКА КОСМИЧЕСКОЙ РАКЕТЫ | 2015 |
|
RU2582514C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ВОЗМОЖНОСТЬЮ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ (АВАРИЙНОЙ) СИТУАЦИИ | 2016 |
|
RU2632559C2 |
| МНОГОЭЛЕМЕНТНЫЙ СОСТАВНОЙ ВОЗДУШНО-КОСМИЧЕСКИЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ В СИСТЕМЕ МОРСКОГО СТАРТА | 2021 |
|
RU2769791C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАКЕТЫ-НОСИТЕЛЯ НА НАЧАЛЬНОМ УЧАСТКЕ ПОЛЕТА | 2012 |
|
RU2495800C1 |
| СПОСОБ СПУСКА УСКОРИТЕЛЯ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ ПРИ АВАРИЙНОМ ВЫКЛЮЧЕНИИ ЖРД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2746473C1 |
Изобретение относится к ракетно-космической технике и может быть использовано в ракетах космического назначения (РКН) с многодвигательной первой ступенью. При невзрывном отказе одного из двигателей выполняют маневр увода аварийной ракеты за счет разворота ракеты в сторону от сооружений стартового комплекса (СК) по заранее введенным в систему управления аварийной программе углов тангажа и рыскания и набору аварийных программ по этим углам по числу двигателей и двум полям падения в зоне космодрома. В полете с помощью системы управления вычисляют координаты мгновенной точки падения ракеты на земную поверхность, определяют отказ двигателя, не вышедшего на полную тягу, по интегральному критерию и по характерным параметрам движения ракеты независимо от показаний датчиков бортовой диагностики двигателей. При наличии отказа выбирают поле падения в зависимости от времени определения отказа и соответствующую аварийную программу углов тангажа и рыскания и осуществляют маневр увода ракеты от сооружений СК, затем выключают отказавший двигатель и работающие двигатели при условии принадлежности координат мгновенной точки падения выбранному полю с падением ракеты в это поле. При отсутствии отказа двигателя осуществляют полет по штатной программе углов тангажа и рыскания. Изобретение позволяет упростить конструкции сооружений СК и отводимых элементов, повысить безопасность эксплуатации и ресурс основных сооружений СК, обеспечить сохранность ракеты при неподтверждении отказа двигателя независимой идентификацией отказа по характерным параметрам движения. 11 ил.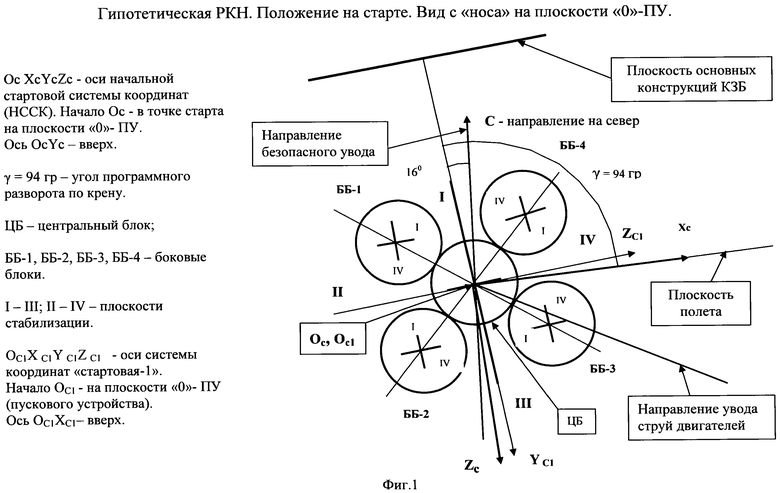
Способ безопасного старта ракеты с многодвигательной первой ступенью, заключающийся в выполнении маневра увода аварийной ракеты, при невзрывном отказе одного из двигателей, за счет разворота ракеты в сторону от сооружений стартового комплекса по заранее введенной в систему управления аварийной программе угла тангажа, отличающийся тем, что в систему управления вводят до полета штатную программу углов тангажа и рыскания и набор аварийных программ по этим углам по числу двигателей (i=1, 2, …, n) и двум полям падения в зоне космодрома, обеспечивающим требования безударности и уменьшение воздействия струй двигателей на стартовые сооружения, а в полете с помощью системы управления вычисляют координаты мгновенной точки падения ракеты на земную поверхность, затем определяют отказ «i»-го двигателя, не вышедшего на полную тягу, по интегральному критерию по характерным параметрам движения ракеты независимо от показаний датчиков бортовой диагностики двигателей, и при наличии отказа «i»-го двигателя выбирают первое или второе поле падения в зависимости от времени определения отказа и соответствующую аварийную программу углов тангажа и рыскания и осуществляют маневр увода ракеты от сооружений стартового комплекса по выбранной программе углов, затем выключают отказавший двигатель при совпадении номера «i» по параметрам движения независимого интегрального критерия ракеты и показаниям датчика диагностики и выключают работающие двигатели при условии принадлежности координат мгновенной точки падения выбранному полю с падением ракеты в это поле, а при отсутствии отказа двигателя осуществляют полет по штатной программе углов тангажа и рыскания.
| СПОСОБ СТАРТА РАКЕТЫ | 2000 |
|
RU2170194C1 |
| RU 2010133238, 06.08.2010 | |||
| СПОСОБ ЗАЩИТЫ СТАРТОВЫХ СООРУЖЕНИЙ ОТ ГАЗОДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ СТРУЙ ДВИГАТЕЛЕЙ РАКЕТЫ | 2009 |
|
RU2407680C1 |
| Новости космонавтики | |||
| - М.: Издательство "Новости космонавтики", 2009, №12, с.29-32 | |||
| Афанасьев Н.Б., Батурин Ю.М., Белозерский А.Г | |||
| и др | |||
| Мировая пилотируемая космонавтика | |||
| История | |||
| Техника | |||
| Люди | |||
| Издательство "РТСофт", 2005, с.180-182. | |||

