Изобретение относится к области наведения баллистических ракет (БР) и может быть использовано при создании и эксплуатации бортовых систем наведения БР.
Известен способ терминального наведения БР [1], базирующийся на следующих основных положениях:
1. БР обладает возможностью автономного управления направлением силы тяги двигательной установки (ДУ) путем целенаправленного изменения угла тангажа  и угла рыскания ψ, а также возможностью выработки разовых команд на выключение ДУ.
и угла рыскания ψ, а также возможностью выработки разовых команд на выключение ДУ.
2. Наведение БР осуществляется с использованием терминального метода наведения «по конечной требуемой скорости».
3. Бортовые алгоритмы, основанные на методе терминального наведения, включают в себя проведение следующих операций:
- прогноз активного участка траектории (АУТ) путем интегрирования дифференциальных уравнений движения БР с применением метода «коррелированной» траектории;
- прогноз пассивного участка траектории (ПУТ) путем интегрирования ДУ без атмосферы с учетом двух гармоник гравитационного поля в абсолютной геоцентрической СК;
- определение промаха, расчет баллистических производных с применением аналитических зависимостей кеплеровой теории, расчет поправки к текущему вектору скорости, расчет поправки к вектору кажущейся скорости, определение поправки к расчетному времени окончания АУТ, определение вектора требуемой кажущейся скорости;
- определение вектора командной кажущейся скорости (ККС), необходимой для достижения терминальных условий наведения

Где  - вектор требуемой кажущейся скорости;
- вектор требуемой кажущейся скорости;
 - вектор кажущейся скорости в текущий момент времени;
- вектор кажущейся скорости в текущий момент времени;
- расчет управляющих параметров в виде требуемых углов тангажа  и рыскания
и рыскания 
Где  - проекции вектора ККС на оси приборной СК.
- проекции вектора ККС на оси приборной СК.
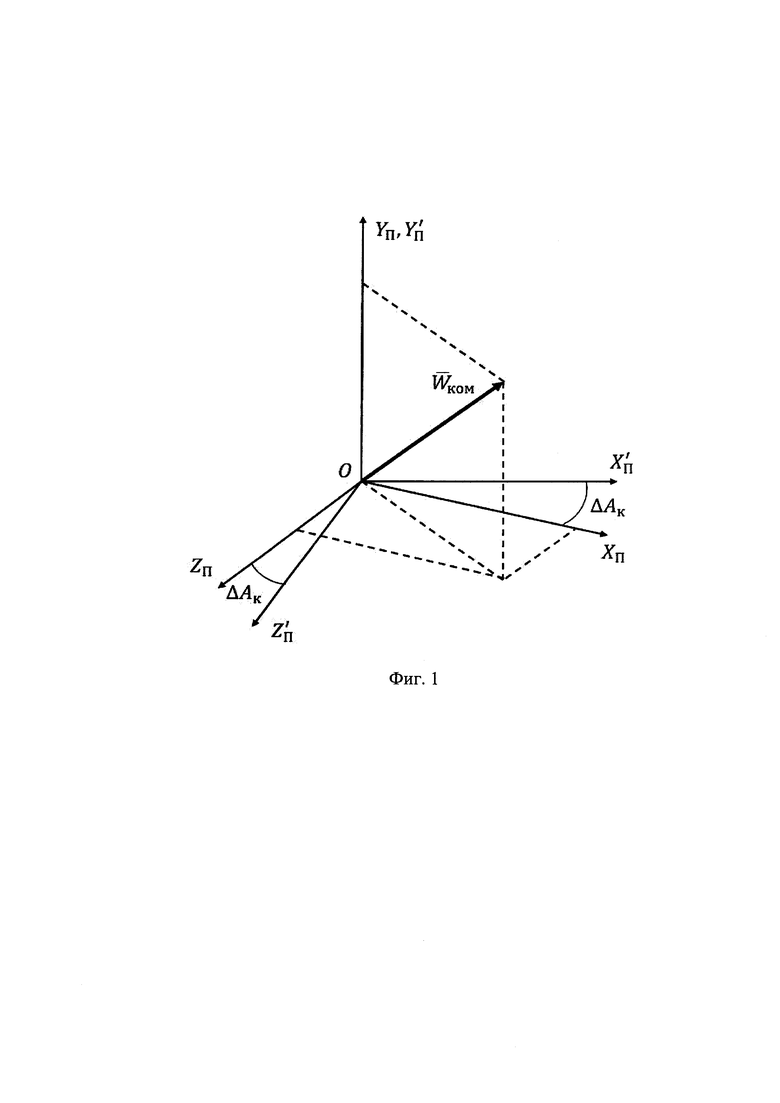
Недостатком способа-аналога является то, что при наличии ошибки прицеливания во время старта БР, обусловленной грубой выставкой гиростабили-зированной платформы (ГСП) по азимуту, проекции расчетного вектора ККС  (см. формулу (1)) определяют на оси приборной СК OXПYПZП (см. фиг. 1), в которой плоскость ОXПYП не совпадает с действительной плоскостью пуска, и, соответственно, отработка требуемых углов тангажа
(см. формулу (1)) определяют на оси приборной СК OXПYПZП (см. фиг. 1), в которой плоскость ОXПYП не совпадает с действительной плоскостью пуска, и, соответственно, отработка требуемых углов тангажа  и рыскания
и рыскания  (см. формулы (2)) не будет обеспечивать движение БР по попадающей траектории.
(см. формулы (2)) не будет обеспечивать движение БР по попадающей траектории.
Задачей предлагаемого изобретения является внесение в бортовой алгоритм терминального наведения БР изменений, которые позволят обеспечить движение БР по попадающей траектории при отработке расчетных управляющих параметров при наличии ошибки прицеливания во время пуска.
Технический результат достигается тем, что в каждом цикле наведения рассчитывают требуемые углы тангажа и рыскания в зависимости от направления и величины вектора ККС для достижения терминальных условий наведения, отличающийся тем, что на выходе системы азимутальной коррекции получают комплексированный сигнал, равный разности расчетного и действительного значений азимута полета; определяют ориентацию осей «скорректированной» приборной СК, отличной от приборной СК на угол поворота вокруг вертикальной оси, пропорциональный комплексированному сигналу; определяют проекции вектора ККС на оси «скорректированной» приборной СК.
Сущность изобретения поясняется приведенным ниже описанием и фигурой 1.
Суть предлагаемого способа терминального наведения БР заключается в том, что как и в ближайшем аналоге, наведение БР осуществляется путем прогноза дальнейшего управляемого полета, но управляющие параметры, обеспечивающие выполнение терминальных условий наведения, определяются с помощью проекций вектора ККС на оси «скорректированной» приборной СК  с учетом разности расчетного и действительного значения азимута полета БР.
с учетом разности расчетного и действительного значения азимута полета БР.
Способ терминального наведения БР на АУТ, обеспечивающий последующий полет по попадающей траектории, при наличии ошибки прицеливания включает:
1. Получение комплексированного сигнала с системы азимутальной коррекции по информации о расчетном и действительном значении азимута полета БР:

где АИНС - азимут полета, рассчитанный по информации с инерциальной навигационной системы;
АНС - азимут полета, рассчитанный по навигационным параметрам с позиционной навигационной системы.
2. Формирование матрицы направляющих косинусов для перехода к «скорректированной» приборной СК:

3. Прогноз АУТ, прогноз ПУТ, определение промаха, расчет баллистических производных, расчет поправки к текущему вектору скорости, расчет поправки к вектору кажущейся скорости, определение поправки к расчетному времени окончания АУТ, определение вектора требуемой кажущейся скорости и вектора ККС по формуле (1).
5. Определение вектора ККС в проекциях на оси «скорректированной» приборной СК:

6. Расчет управляющих параметров в виде требуемых углов тангажа  и рыскания
и рыскания  путем подстановки проекций вектора
путем подстановки проекций вектора  в формулы (2):
в формулы (2):
где

Таким образом, разработан способ терминального наведения БР на АУТ, при котором определяются требуемые управляющие параметры, учитывающие наличие ошибки прицеливания по азимуту во время старта и обеспечивающие движение БР по попадающей траектории.
Список литературы
1. Лысенко Л.Н. Наведение и навигация баллистических ракет: Учеб. пособие. - М.: Издательство МГТУ им. Н.Э. Баумана, 2020. - 448 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ ВЫВЕДЕНИЯ НА ОРБИТУ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ПАКЕТНОЙ СХЕМЫ НА УЧАСТКЕ ПОЛЕТА ДО ОТДЕЛЕНИЯ БОКОВЫХ БЛОКОВ | 2011 |
|
RU2481247C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ СТРЕЛЬБЫ РЕАКТИВНЫМИ СНАРЯДАМИ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ В УСЛОВИЯХ КОНТРБАТАРЕЙНОЙ БОРЬБЫ | 2014 |
|
RU2602162C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| Устройство обеспечения посадки возвращаемой многоразовой ступени ракеты-носителя | 2024 |
|
RU2841245C1 |
Изобретение относится к области ракетной техники и касается способа терминального наведения баллистической ракеты на активном участке траектории при наличии ошибки прицеливания. Способ заключается в том, что в каждом цикле наведения рассчитывают требуемые углы тангажа и рыскания в зависимости от направления и величины вектора командной кажущейся скорости для достижения терминальных условий наведения. При этом на выходе системы азимутальной коррекции получают комплексированный сигнал, равный разности расчетного и действительного значений азимута полета и определяют ориентацию осей скорректированной приборной системы координат, отличной от приборной системы координат на угол поворота вокруг вертикальной оси, пропорциональный комплексированному сигналу, и определяют проекции вектора командной кажущейся скорости на оси скорректированной приборной системы координат. Технический результат заключается в обеспечении движения баллистической ракеты по попадающей траектории при наличии ошибки прицеливания во время пуска. 1 ил.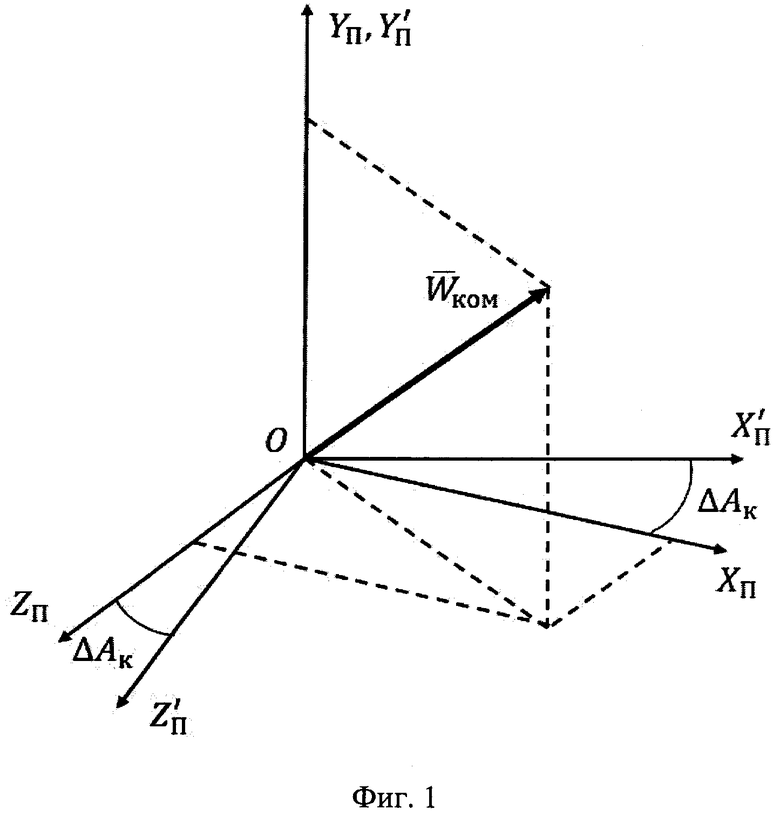
Способ терминального наведения баллистической ракеты на активном участке траектории при наличии ошибки прицеливания, заключающийся в том, что в каждом цикле наведения рассчитывают требуемые углы тангажа и рыскания в зависимости от направления и величины вектора командной кажущейся скорости для достижения терминальных условий наведения, отличающийся тем, что на выходе системы азимутальной коррекции получают комплексированный сигнал, равный разности расчетного и действительного значений азимута полета; определяют ориентацию осей «скорректированной» приборной системы координат, отличной от приборной системы координат на угол поворота вокруг вертикальной оси, пропорциональный комплексированному сигналу; определяют проекции вектора командной кажущейся скорости на оси «скорректированной» приборной системы координат.
| Лысенко Л.Н | |||
| "Наведение и навигация баллистических ракет: Учеб | |||
| пособие", М., Издательство МГТУ им | |||
| Н.Э | |||
| Баумана, 2007 г | |||
| Моноплан с несколькими двигателями | 1924 |
|
SU672A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| US 2022100926 A1, 31.03.2022. | |||

