Изобретение относится к машиностроению, конкретно к технике сейсмической защиты народно-хозяйственных объектов, таких как атомные станции, химические предприятия, тепловые электростанции и др. объекты и строительные сооружения большой массы.
Заявленный способ направлен на повышение эффективности защиты потенциально опасных объектов и обеспечение возможности расширения географии строительства, вплоть до зон с предельными уровнями землетрясений и др. видов сейсмической активности.
Известны различные способы сейсмической защиты объектов амортизации от сейсмических и ударных нагрузок.
Например, известен способ амортизации, по которому защищаемый объект устанавливают в сооружении на упругодемпфирующих опорах, при этом значения собственных частот амортизации задают ниже частот воздействия. См. стр.78-79, п.п.1…3, стр.81 в кн. Круглов Ю.А., Туманов Ю.А. Ударовирозащита машин, оборудования и аппаратуры. - Л.: Машиностроение. Ленигр. отд-ние, 1986.
Этот известный способ обладает рядом недостатков, основным из которых является невозможность обеспечения стабильного пространственного положения АО при длительной эксплуатации, ограничена эффективность амортизации, т.к. для эффективной защиты АО при минимальном значении хода требуется, чтобы характеристики амортизаторов обеспечивали не просто низкочастотные колебания по спектру, лежащие ниже частот воздействия. Требуется создание режима апериодического движения, возможное при сверхкритическом демпфировании, что в свою очередь требует применения не просто упругих и демпфирующих элементов, но применения амортизаторов пневмогидравлического типа и двухштоковых схем компоновки амортизаторов.
Известен способ амортизации, реализуемый при работе устройства - системы амортизации, снабженной пневмогидравлическими амортизаторами, содержащими корпус с полостью для сжатого газа, основной шток, дополнительный шток и гидравлические полости (патент Российской Федерации №2178846 от 28.12.1999 г. кл. F16F 9/20).
Этот известный способ амортизации состоит в том, что при внешнем динамическом нагружении на амортизируемый объект (далее - АО или объект), находящийся в стационарном исходном положении, передается реакция амортизаторов, состоящая из суммы упругой и демпфирующей составляющих, и которую с помощью задаваемых силовых характеристик амортизаторов ограничивают до допустимой величины. Упругую характеристику амортизаторов задают ступенчатого типа для обеспечения стабильного положения АО в пространстве. От действия реакции амортизаторов объект совершает движение, штоки амортизаторов совершают рабочие ходы и после окончания внешних нагрузок под действием реакций амортизаторов объект совершает колебательное затухающее движение.
По отношению к заявленному способу данный способ амортизации является наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату и принят за прототип.
Недостатком известного способа амортизации является то, что характеристика упругой силы (далее - упругой реакции), передаваемая на АО, является ступенчатой, что совершенно необходимо для обеспечения стабильного положения АО при эксплуатации, но при проходе через исходное положение, а также при выходе из исходного положения с ходом на растяжение или сжатие на АО действует скачкообразно-ступенчато изменяющаяся сила, создающая на АО повышенный уровень вибраций. Ступеньку упругой характеристики получают путем задания площади штока основного или следящего при соответсвующем зарядном давлении.
Упругую силу соотносят с весовой нагрузкой на амортизатор, т.к. она нужна для восприятия стационарной весовой нагрузки.
При работе системы амортизации при весе G для сжатия амортизатора необходимо приложить силу, например (1,2…3,0)G, а при растяжении, например, шток выйдет при уровне силы (0,2…0,5)G. При сжатии происходит рост упругой реакции, а при растяжении - ее падение. Ступенька упругой характеристики имеет принципиальную природу возникновения: она вызвана различием площадей основного и дополнительного (следящего) штоков, которые выбираются преимущественно из конструктивных соображений, исходя из коаксиальной компоновки штоков, а именно толщины стенки полого штока, рассчитанной на перепад давлений в сотни атмосфер, требований по поперечной жесткости сборки штоков, которая при работе должна перемещаться в продольном направлении в условиях поперечных нагрузок. При «большой» ступеньке энергопоглощающие свойства амортизатора увеличиваются, при «малой» снижаются и опеделяются разностью площадей основного и дополнительного штоков. При создании систем амортизации, как правило, стремятся к увеличению полноты диаграммы энергопоглощения «усилие - ход», которая является важной для минимизации перемещения АО от внешнего нагружения.
Наличие ступеньки упругой характеристики, повышая энергопоглощающие свойства амортизации, увеличивает вибрационные нагрузки на амортизируемый объект при динамическом воздействии.
Это явление также имеет принципиальный характер и обусловлено как величиной ступенчатого изменения упругой реакции в начальный момент выхода из исходного положения и при проходе исходного положения в процессе работы, так и малым временем нарастания силы, измеряемым единицами миллисекунд, вследствие незначительности упругого удлинения амортизатора в этом режиме работы, т.о. происходит резкое изменение упругой реакции, что неблагоприятно сказывается на динамике нагружения АО при работе системы амортизации. Например, упругое удлинение амортизатора пневмогидравического типа при изменении напряжений сжатия или растяжения в сечении штока от 0 до 50% σт, что соответствует нагружению при коэффициенте запаса прочности 2, составляет величину всего 0,5…0,8 мм. Таким образом, такая жесткая ступенька принципиально предопределяет малые времена нарастания упругой реакции амортизатора при динамическом режиме работы амортизатора от внешнего нагружения
Настоящее изобретение - заявляемый способ амортизации устраняет указанные недостатки и позволяет уменьшить вибрационные нагрузки на амортизируемый объект.
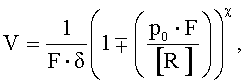
Указанный технический результат достигается тем, что ступенчатую упругую характеристику амортизатора получают путем вычитания реакции дополнительного штока из реакции основного штока, причем это вычитание реакции дополнительного штока производят при ходе амортизатора на растяжение из исходного положения, величину ступеньки получают путем задания величины площади дополнительного штока в диапазоне 10…40% от величины площади основного штока и задания величины зарядного давления газа в амортизаторе, а протяженность участка нарастания-спада упругой реакции из исходного положения в переходной зоне задают в пределах 2…5% располагаемого хода сжатия-растяжения амортизатора, для чего между корпусом амортизатора и дополнительным штоком устанавливают упругий элемент в виде пружины с рабочим ходом 2…5% располагаемого хода сжатия-растяжения амортизатора, а объем газовой полости амортизатора задают из соотношения:
 ,
,
в котором F - площадь штока амортизатора при ходе сжатия,
p0 - зарядное давление,
[R] - допустимое значение упругой реакции амортизатора, передаваемой на сооружение,
δ - ход амортизатора, необходимый для восприятия внешней нагрузки, знак «-» соответствует растяжению, знак «+» - ходу сжатия амортизатора.
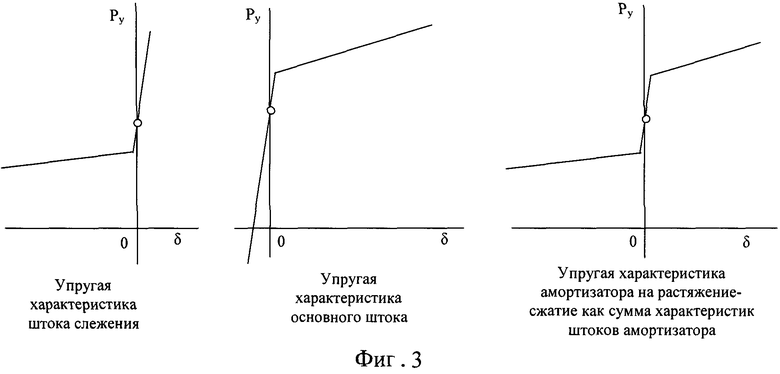
Таким образом, в заявленном способе реализуется новый неклассический принцип получения ступеньки упругой характеристики: не суммированием двух односторонних характеристик штоков, как показано для прототипа на фиг.3, а созданием единой базовой упругой характеристики основного штока на полном ходе растяжения-сжатия амортизатора с вычитанием из нее односторонней характеристики следящего (или дополнительного) штока в фазе работы амортизатора на растяжение из исходного положения.
Этот новый принцип позволяет выполнить упругий элемент как узел, обеспечивающий переходный участок нарастания реакции на участке ступеньки и рассчитанный на передачу только реакции следящего (дополнительного) штока, конструктивно компактным и с заданной протяженностью. В исходном положении упругий элемент частично обжат заданной величиной части ступеньки от весовой нагрузки, что составляет, например, 5…20% от весовой нагрузки, при обжатии происходит переход от частичного к полному обжатию упругого элемента, и далее работа по участку упругой характеристики, определяемой сжимаемостью газа, а при растяжении плавное снижение упругого усилия - разгрузка упругого элемента до полной потери контакта между штоками и далее работа по участку упругой характеристики, определяемой расширением газовой полости.
Диапазон 2…5% располагаемого хода сжатия-растяжения амортизатора в переходной зоне выбран из объективных законов механики. При скоростях распространения звука в силовых железобетонных конструкциях оснований, отвечающим промышленным нормам сейсмостойкого строительства, 2500…3500 м/с и диапазоне частот колебаний объекта амортизации (5…10)…(250…500) Гц, опасных для механической прочности, см. кн. А.Ленк, Ю.Ренитц. Механические испытания приборов и аппаратов. - М.: Мир, 1976, время нарастания реакции составляет 0,003…0,008 с. Заявленный амортизатор обеспечивает времена нарастания упругой реакции от 0,03…0,05 до 0,3…0,5 с. В результате уровень возбуждения упругих колебаний в объекте амортизации при работе системы амортизации по заявленному способу понижается в 3…5 раз, что является эффективным результатом в технике сейсмозащиты.
Другим объективным критерием назначения этого диапазона являются упругие деформации скального массива в основании. Известно, что при землетрясениях амплитуда колебания основания, передаваемая от источника сейсмического возмущения, ограничена упругой деформативностью скального массива, при превышении ее происходит разрушение скального массива, что ограничивает передачу сейсмического возмущения. В качестве физической величины предельной упругой деформации массива следует принять величину 0,4…0,5 м. Принимая как верхнюю оценку ход амортизатора равным величине перемещения основания, ход пружины составляет 10…25 мм (или 2…5%), что обеспечивает, как показано выше, благоприятное динамическое нагружение амортизируемого объекта.
Нижний порог диапазона величин ступеньки упругой характеристики ограничен требованиями по стабильности пространственного положения амортизируемого объекта в исходном положении. Для преодоления трения (составляющего 2,0…2,5%) и настройки весовой нагрузки на середину ступеньки ±5% необходим не менее чем двойной запас восстанавливающих сил.
Верхнее значение диапазона ограничено требованиями по динамической эффективности.
В части задания объема газовой полости амортизатора, необходимой для реализации заявленного способа:
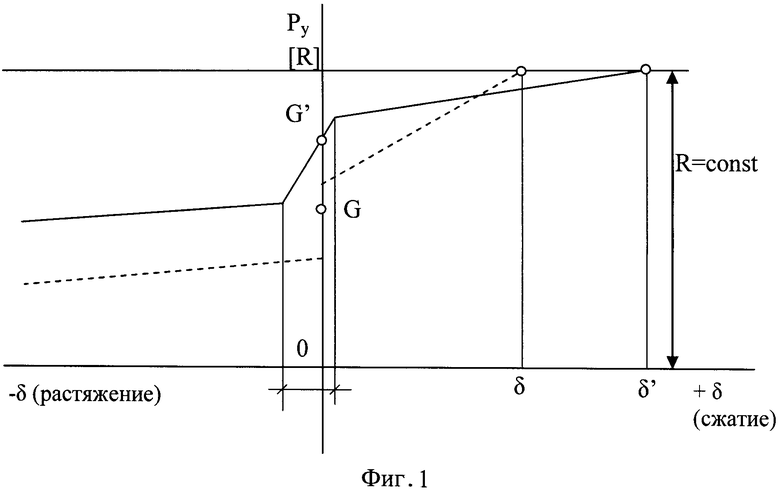
Упругая характеристика заявленного амортизатора (сплошная линия) в сравнении с упругой характеристикой известного амортизатора (пунктир) приведена на фигуре 1 где G и G' - весовая нагрузка для известного и заявленного режима, соответственно δ и δ' - ход штоков амортизаторов. Давление в газовой полости, создающее упругую реакцию амортизатора, определяется соотношением:
где p0 - зарядное давление;
V - номинальный объем газовой полости, соответствующий исходному положению амортизатора;
χ- показатель адиабаты (χ=1,3 для адиабатического процесса);
ΔV=F·δ - объем жидкости, вытесненный при ходе сжатия амортизатора, приводит к уменьшению объема газовой полости.
При максимальном ходе δ' упругая реакция R' не должна превышать значение [R]. Из соотношения (1) получим соотношение для назначения объема V газовой полости амортизатора, при котором его упругая реакция PY не превышает значение [R]:
с учетом того, что 
где F - площадь штока амортизатора при ходе сжатия;
p0 - зарядное давление;
[R] - допустимое значение упругой реакции амортизатора, передаваемой на основание;
входящие в соотношение (3) конструктивные параметры:
δ - ход амортизатора, необходимый для восприятия внешней нагрузки, знак «-» соответствует растяжению, знак «+» - ходу сжатия амортизатора.
Заявленный способ открывает целую серию технических решений - устройств амортизации, в которых по иному формируется ступенька упругой характеристики и практически отсутствуют ограничения по ее уменьшению. Ступенька может быть выполнена любой необходимой величины в заявленном диапазоне при сохранении конструктивно-компоновочных решений амортизаторов.
Перечень фигур графических изображений:
Фиг.1 - Упругая характеристика амортизатора пневмогидравлического типа по заявленному (сплошная линия) и известному (пунктир) способам.
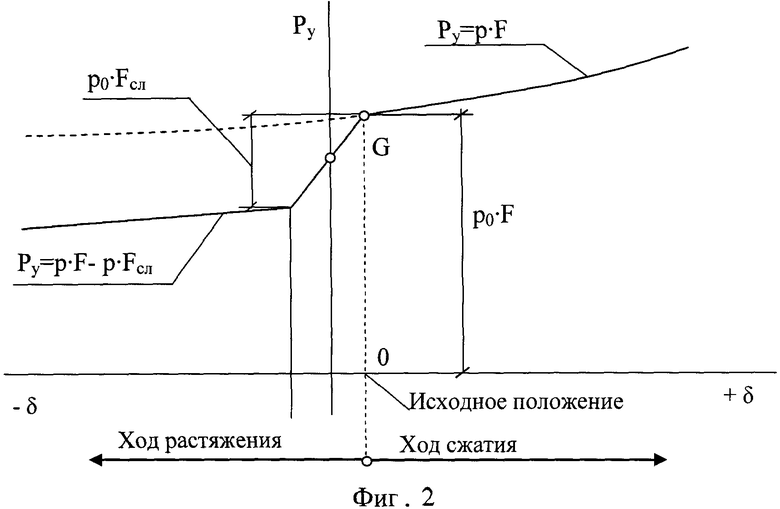
Фиг.2 - Получение ступеньки упругой характеристики амортизатора по заявленному способу.
Фиг.3 - Схема формирования ступеньки упругой характеристики в известном двухштоковом пневмогидравлическом амортизаторе (прототип).
Фиг.4 - Схема пневмогидравлического амортизатора, реализующего заявленный способ (заявка на амортизатор подана одновременно с заявкой на данный способ).
Заявленный способ реализуется следующим образом.
Для иллюстрации рассмотрим заявленный способ на примере технического решения пневмогидравлического амортизатора по заявке того же заявителя, поданной одновременно с заявкой на данный способ, и конструктивная схема которого приведена на фиг.4.
Между защищаемым объектом и сооружением устанавливают упругодемпфирующие связи в виде двухсторонних пневмогидравлических амортизаторов со ступенчатой упругой характеристикой на растяжение и сжатие, которую получают путем задания рабочих площадей штоков и задания величины зарядного давления в амортизаторе, при действии внешних динамических нагрузок передают от сооружения через амортизатор на объект усилие, ограниченное по величине и состоящее из суммы упругой и демпфирующей сил, при этом ступеньку упругой характеристики амортизатора получают путем вычитания реакции дополнительного штока из реакции основного штока при ходе амортизатора из исходного положения на растяжение, величину ступеньки получают путем задания величины площади дополнительного штока в диапазоне 10…40% от величины площади основного штока, и задания величины давления газа, протяженность участка нарастания-спада упругой реакции из исходного положения в переходной зоне задают в пределах 2…5% располагаемого хода сжатия-растяжения амортизатора, для чего между корпусом амортизатора и дополнительным штоком устанавливают упругий элемент в виде пружины с рабочим ходом 2…5% располагаемого хода сжатия-растяжения амортизатора, а объем газовой полости амортизатора задают из соотношения:
где F - площадь штока амортизатора при ходе сжатия;
p0 - зарядное давление;
[R] - допустимое значение упругой реакции амортизатора, передаваемой на основание;
входящие в соотношение (3) конструктивные параметры:
δ - ход амортизатора, необходимый для восприятия внешней нагрузки, знак «-» соответствует растяжению, знак «+» - ходу сжатия амортизатора, а рабочую точку положения весовой нагрузки помещают в пределах переходного участка сжатия упругого элемента между основным и дополнительным штоком.
В исходном состоянии штоки амортизатора находятся в положении: основной шток выдвинут на полный рабочий ход для обеспечения последующего хода сжатия и дополнительно на часть хода упругой пружины, дополнительный шток полностью обжат весовой нагрузкой от амортизируемого объекта для обеспечения последующего хода растяжения и находится внутри амортизатора.
Реакция от веса G, см. фиг.2, находится на ступенчатом переходном участке характеристики. Пружина с рабочим ходом 2…5% располагаемого хода сжатия-растяжения амортизатора обжата частично, начало ее обжатия - в точке «0» на оси абсцисс - на фиг.2 обозначено как «исходное положение». (При исключении дополнительного штока упругая характеристика (показана пунктиром на фиг.2) амортизатора вырождается в характеристику традиционного одноштокового амортизатора). При фазе колебания основания вниз происходит падение упругой реакции. График упругой силы Py (δ) отслеживает движение по переходному участку ступеньки, пружина между основным и дополнительным штоками сжимается и при изменении реакции от значения Py=p F на величину (p0 Fсл) сжатие пружины заканчивается и далее начинается выход дополнительного штока, ограничивающего падение реакции на амортизаторе. Таким образом, задавая величину площади дополнительного штока в указанном диапазоне 10…40% от величины площади основного штока и задавая необходимую величину давления газа, достигают повышение динамической эффективности амортизатора за счет создания конструктивно регулируемой ступеньки: одно базовое решение амортизатора позволяет получать ступеньку упругой характеристики в диапазоне 10…40%.
Для обеспечения вписывания реакций, развиваемых амортизатором в установленные ограничения, особенно это актуально при модернизации существующих объектов, где эти ограничения объективно существуют, необходимо управлять темпом роста упругой реакции Py(δ), по ходу амортизатора, как показано на фиг.1.
При увеличении весовой нагрузки и увеличении рабочего хода (при модернизации) необходимо значительное снижение (уменьшение) крутизны упругой характеристики основного штока, т.к. нужно вписаться в старые уровни нагрузок при увеличенном весе и ходе.
Установленное ограничение упругой реакции Py(δ) выполняется в том случае, если объем V газовой полости амортизатора задают из соотношения:
где входящие в соотношение конструктивные параметры представляют собой:
F - площадь штока амортизатора при ходе сжатия;
p0 - зарядное давление;
[R] - допустимое значение упругой реакции амортизатора, передаваемой на основание;
δ - ход амортизатора, необходимый для восприятия внешней нагрузки, знак «-» соответствует растяжению, знак «+» - ходу сжатия амортизатора, а рабочую точку положения весовой нагрузки помещают в пределах переходного участка сжатия упругого элемента между основным и дополнительным штоком.
Данный способ может быть реализован рядом технических решений амортизаторов.
Так, например, одновременно с данной заявкой подана тем же заявителем заявка на изобретение «Пневмогидравлический амортизатор», реализующий заявляемый способ. Конструктивная схема устройства амортизатора представлена на фиг.4. График упругой реакции при вариации весовой нагрузки на амортизатор и при вариации величины хода сжатия амортизатора показан на фиг.3. На фигуре показаны некоторые возможные варианты упругих характеристик амортизатора и «вписывание» их в установленный уровень ограничения [R].
Заявленный способ может применяться в различных отраслях народного хозяйства, преимущественно там, где требуется размещение объектов в сейсмоопасных зонах.
В качестве амортизируемого объекта может быть атомная станция, химическое предприятие, тепловая электростанция, строительные сооружения массой до тысяч и десятков тысяч тонн.
Заявленный способ открывает перспективу создания целого ряда устройств - амортизаторов пневмогидравлического типа повышенной эффективности и позволяет существенно, в несколько раз поднять эффективность защиты потенциально опасных объектов, расширить географию строительства, вплоть до зон с предельными уровнями землетрясений и др. видов сейсмической активности, и является прогрессивным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481507C1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1994 |
|
RU2079747C1 |
| Способ сейсмоизоляции объектов и амортизационное устройство (варианты) для его осуществления | 2022 |
|
RU2787418C1 |
| АМОРТИЗАТОР ДЛЯ СИСТЕМ УДАРОЗАЩИТЫ | 2011 |
|
RU2465495C1 |
| Адаптивная система сейсмозащиты объектов | 2024 |
|
RU2840271C1 |
| Адаптивная система сейсмозащиты объектов | 2024 |
|
RU2840272C1 |
| УСТРОЙСТВО для АМОРТИЗАЦИИ СЕЙСМИЧЕСКИХ | 1973 |
|
SU376615A1 |
| Амортизационное устройство для сейсмоизоляции объектов (варианты) | 2023 |
|
RU2799276C1 |
| УСТРОЙСТВО ДЛЯ АМОРТИЗАЦИИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ШАХТНОМ СООРУЖЕНИИ | 2011 |
|
RU2457376C1 |
| Адаптивная система сейсмозащиты объектов (варианты) | 2023 |
|
RU2820180C1 |
Изобретение относится к машиностроению. Способ заключается в том, что между защищаемым объектом и сооружением устанавливают упругодемпфирующие связи в виде двухсторонних пневмогидравлических амортизаторов со ступенчатой упругой характеристикой на растяжение и сжатие. При действии внешних динамических нагрузок передают от сооружения через амортизатор на объект усилие, ограниченное по величине и состоящее из суммы упругой и демпфирующей сил. Ступеньку упругой характеристики амортизатора получают путем вычитания реакции дополнительного штока из реакции основного штока при ходе амортизатора из исходного положения на растяжение. Величину ступеньки получают путем задания величины площади дополнительного штока в диапазоне 10…40% от площади основного штока и давления газа. Протяженность участка нарастания-спада упругой реакции из исходного положения в переходной зоне задают в пределах 2…5% располагаемого хода сжатия-растяжения амортизатора. Между корпусом амортизатора и дополнительным штоком устанавливают упругий элемент в виде пружины с рабочим ходом 2…5% располагаемого хода сжатия-растяжения амортизатора. Рассчитывают объем газовой полости амортизатора. Рабочую точку положения весовой нагрузки помещают в пределах переходного участка сжатия упругого элемента между основным и дополнительным штоком. Достигается повышение эффективности амортизатора, снижение нагрузок, передаваемых на сооружение, и снижение массы и габаритов амортизаторов. 4 ил.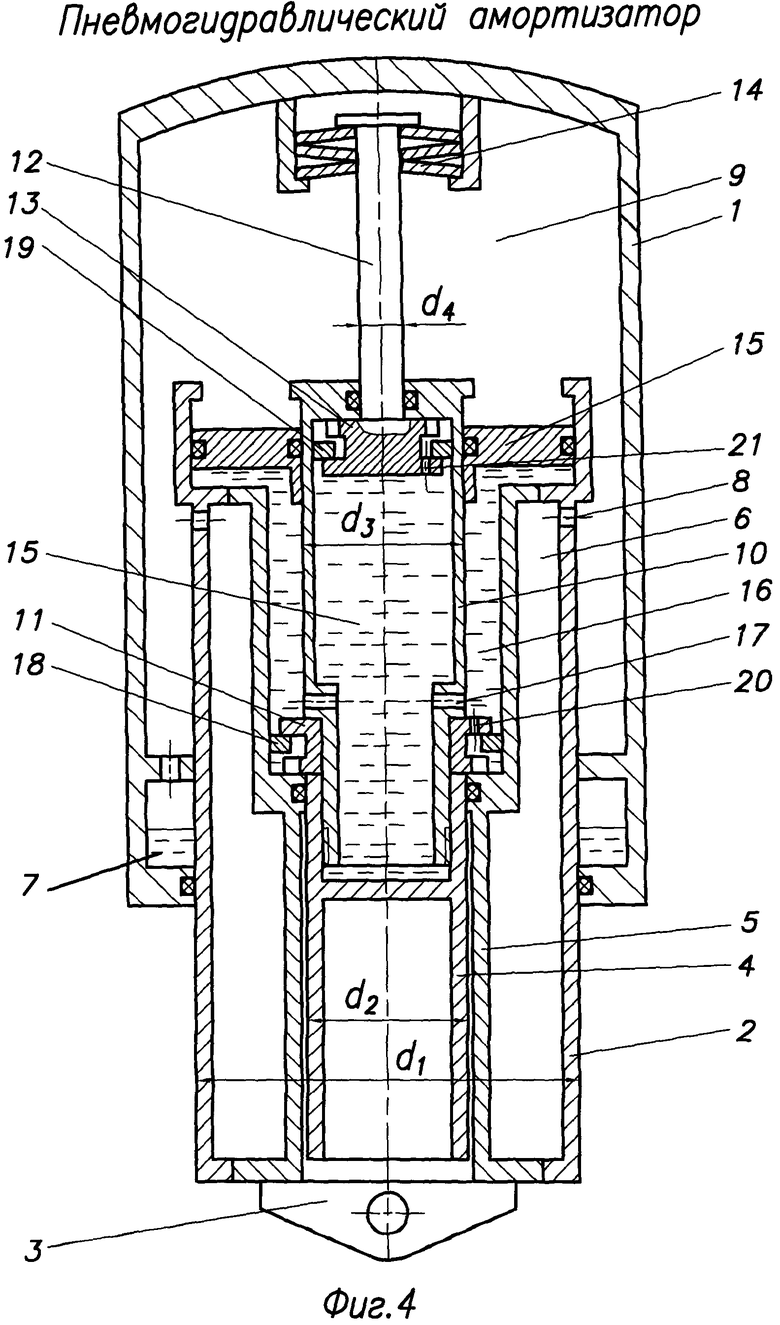
Способ амортизации, по которому устанавливают между защищаемым объектом и сооружением упругодемпфирующие связи в виде двухсторонних пневмогидравлических амортизаторов со ступенчатой упругой характеристикой на растяжение и сжатие, которую получают путем задания рабочей площади каждого из штоков и величины зарядного давления в амортизаторе, при действии внешних динамических нагрузок передают от сооружения через амортизатор на объект усилие, ограниченное по величине и состоящее из суммы упругой и демпфирующей сил, отличающийся тем, что, с целью повышения динамической эффективности амортизатора путем передачи более благоприятного динамического нагружения на амортизируемый объект, снижения нагрузок, передаваемых на сооружение, и снижения массы и габаритов амортизаторов, ступеньку упругой характеристики амортизатора получают путем вычитания реакции дополнительного штока из реакции основного штока при ходе амортизатора из исходного положения на растяжение, величину ступеньки получают путем задания величины площади дополнительного штока в диапазоне 10…40% от величины площади основного штока и задания величины давления газа, протяженность участка нарастания - спада упругой реакции из исходного положения в переходной зоне задают в пределах 2…5% располагаемого хода сжатия-растяжения амортизатора, для чего между корпусом амортизатора и дополнительным штоком устанавливают упругий элемент в виде пружины с рабочим ходом 2…5% располагаемого хода сжатия-растяжения амортизатора, а объем газовой полости амортизатора задают из соотношения
где F - площадь штока амортизатора при ходе сжатия,
р0 - зарядное давление,
[R] - допустимое значение упругой реакции амортизатора, передаваемой на основание,
δ - ход амортизатора, необходимый для восприятия внешней нагрузки,
χ - показатель адиабаты, знак «-» соответствует растяжению, знак «+» - ходу сжатия амортизатора, а рабочую точку положения весовой нагрузки помещают в пределах переходного участка сжатия упругого элемента между основным и дополнительным штоками.
| ДВУСТОРОННИЙ АМОРТИЗАТОР | 1999 |
|
RU2178846C2 |
| Гидропневматическая рессора подвески транспортного средства | 1972 |
|
SU564790A3 |
| DE 4116399 А1, 19.11.1992 | |||
| Устройство для сортировки и укладки пиломатериалов | 1983 |
|
SU1163920A1 |

