Изобретение относится к измерительной технике и предназначено для прецизионного измерения расстояний. Преимущественное назначение - измерение больших расстояний с высокой точностью и задание эталонных расстояний.
Известны способы определения длины измеряемого отрезка, в которых измеряют фазовые сдвиги модулированного или немодулированного сигнала с использованием, например, фазометров или оптических мостов, где измеряемый отрезок является одним из плеч моста [патенты US: 4531833; 4413904; 4105332; 4190362; 4403857; 5880822; А.А.Генике, А.М.Афанасьев. Геодезические свето- и радиодальномеры. М., Недра, 1988 г.]. Недостатком их является необходимость использования контрольных эталонных отрезков, а также вклад в неопределенность результата измерений процессов, происходящих в излучающих, фокусирующих, отражающих, детектирующих и других узлах. Известен также способ определения длины отрезка, в котором используют оптический резонатор, состоящий из неподвижного зеркала и подвижного зеркала, при перемещении которого считают события резонанса и по их количеству и длине волны используемого монохроматического света определяют пройденное зеркалом расстояние [патент US 3661464]. Недостатком этого способа является сложность используемого оборудования, пропорциональность ошибки измеряемой длине, т.к. абсолютная ошибка, с которой определена длина волны, умножается на число длин волн, укладывающихся на измеряемом отрезке, а также большие затраты времени на измерение.
Известны многочисленные способы (и устройства для их осуществления) для определения длины отрезка (расстояния), заключающиеся в том, что измеряют время прохождения измеряемого расстояния электромагнитной волной от источника сигнала до приемника (часто с отражением от зеркала), широко используемые, например, в геодезии и в системах навигации, в т.ч. спутниковых [Например: Шебшаевич B.C. и др. Сетевые спутниковые радионавигационные системы. - М.: Радио и связь, 1993, с.305-309; RU 94018148, US 2008/0007711 A1]. Недостатком их являются ошибки (временные сдвиги), вносимые процессами в излучателях, отражателях и детекторах, требующие коррекции с использованием эталонных мер длины, что делает их неприемлемыми в качестве собственно эталонов расстояния. Если время прохождения сигнала от источника до приемника определяют как разность времени регистрации сигнала приемником и времени излучения сигнала источником, то необходима коррекция, т.к. фиксируемое в обоих случаях время отличается от времени прохождения сигналом концов (конца) измеряемого отрезка из-за конечного (не определенного строго) времени срабатывания электронных управляющих и детектирующих устройств источника и приемника, из-за геометрической разнесенности концов измеряемого отрезка и точек, в которых происходит излучение и детектирование сигнала, и т.п. [US 5880821]. Коррекцию производят корректирующими добавками ко времени излучения сигнала и/или ко времени регистрации после прохождения сигналом измеряемого расстояния. Корректирующие добавки времени и определяют, собственно, между какими именно точками определяется расстояние. Известен также оптический дальномер, измеряющий расстояние по времени прохождения сигнала до отражателя и обратно и использующий один и тот же детектор для фиксирования моментов отправки и возвращения сигнала [US 4770526], но эти сигналы подают на детектор по различным световодам (разные пути и их оптические длины), что также приводит к необходимости коррекции измеряемого времени с помощью эталонных отрезков. Дополнительным недостатком этих способов и устройств их осуществляющих является необходимость регулярного проведения такой корректировки (калибровки), т.к. свойства устройств (например, быстродействие электронных элементов и узлов, длина и свойства световодов, геометрия всего устройства) зависят от таких факторов, как температура, влажность, продолжительность работы, срок службы и т.д. При проведении прецизионных измерений такую корректировку со сличением необходимо неоднократно повторять даже в ходе определения длины одного отрезка, т.к. за время набора статистики меняются параметры дальномера.
Целью предлагаемого изобретения является создание возможности прямого высокоточного измерения и задания расстояний на основе определения метра без использования эталонных мер длины, в т.ч. задание эталонных отрезков, повышение точности измерения больших расстояний, ускорение и упрощение процедуры измерения.
Указанная цель в предлагаемом изобретении достигается тем (базовая процедура), что датчики приемников, содержащих высокоточные (высокостабильные) часы с накапливаемой за время измерения ошибкой Δt<Δl/c, где Δt - накапливаемая за время измерения неточность определения времени, Δl - предельно допустимая ошибка измерения расстояния, с - скорость распространения сигнала, располагают на требуемом расстоянии друг от друга, сигнал заданной формы подают вдоль и извне соединяющего датчики отрезка и определяют время регистрации этого сигнала по заданному алгоритму каждым из приемников, а расстояние определяют на основании формулы l=c(t2-t1+τ), где l - определяемое расстояние, с - скорость распространения сигнала, t1 и t2 - время регистрации сигнала первым и вторым приемником соответственно, τ - поправка.
Под приемником здесь понимается устройство, включающее датчик сигнала, высокоточные (высокостабильные) часы и средство фиксирования времени по анализу сигнала, поступившего на детектор. Например, время может фиксироваться по переднему фронту сигнала при достаточной его крутизне или - для исключения влияния ослабления сигнала с расстоянием - время может фиксироваться по экстремуму сигнала, или по какой-либо другой вехе сигнала, а использование коротких, фемтосекундных, световых импульсов упрощает эту задачу. При необходимости исключения влияния посторонних сигналов приемники и/или их датчики выполняют селективными.
Поправка τ (алгебраическая величина) компенсирует возможную временную несимметричность приемников: например, у приемников может отличаться время реагирования на сигнал, поступивший на датчик. Ниже приводится способ нахождения τ для данного сочетания приемников или его исключения.
Под нестабильностью часов за время измерения понимается ошибка в определении времени, которая может возникнуть за время измерения.
Предлагаемый способ соответствует современному определению длины как расстояния, проходимого светом за определенное время (1 метр - по соглашению - это расстояние, которое свет проходит в вакууме за 1/299792458 секунды), и основан на достигнутой высокой точности и стабильности часов, особенно атомных часов (стандартов частоты), имеющих уже размеры, удобные для транспортировки.
Предлагаемым способом можно задавать с большой точностью расстояния (эталонные расстояния), величина которых ограничивается только возможностью доставки приемника к концам измеряемого отрезка и предельной дальностью регистрации используемого сигнала детектором. Это особенно существенно для создания эталонов больших длин. Погрешность при измерении предложенным способом (при отсутствии или компенсации влияния среды распространения сигнала) практически не зависит от измеряемого расстояния и определяется только расхождением хода часов (нестабильностью) за время измерения.
Вариант способа, при котором используют одинаковые по конструкции (одинаковая конструкция и подобраны комплектующие с одинаковыми параметрами) и геометрии (форма и размеры всех элементов) приемники позволяет уменьшить временную неопределенность, которая у аналогов связана с временной несимметричностью трактов излучения и детектирования сигналов. В этом случае временные задержки в обоих приемниках одинаковы с высокой точностью и компенсируют друг друга: если в первом по ходу сигнала приемнике зафиксировано время, отстающее на какую-то величину от момента попадания сигнала на детектор, то и на втором отставание будет практически таким же, т.е. разность зафиксированных моментов времени, по которой вычисляется расстояние, не зависит от задержек при регистрации в приемниках. Абсолютного совпадения параметров приемников добиться невозможно, поэтому в данном случает речь идет об области применения, где допустима получаемая точность, т.е. можно пренебречь неполным выполнением условия τ=0. Для данного варианта способа существенна синхронизация не только хода часов, но и их показаний (текущего времени - общий ноль отсчета). Синхронизацию часов производят по известной процедуре как дистанционно, так и не дистанционно, т.е. в лабораторных условиях по известным процедурам. После не дистанционной синхронизации часов их устанавливают, в составе приемников, по концам измеряемого отрезка. При необходимости учитывают релятивистские эффекты, связанные с перемещениями часов после их синхронизации. При дистанционной синхронизации перемещения приемников не требуется.
Для уменьшения влияния индивидуальных характеристик приемников производят измерение предложенным способом (по базовой процедуре) по меньшей мере дважды: первый раз - так, как описано выше (получают l1), а второй - поменяв местами приемники (получают l2), - а расстояние определяют как среднее арифметическое этих двух измерений, т.е. l=lcp=(l1+l2)/2. Смену мест производят параллельным переносом приемников. При различии временных задержек реагирования приемников на поступающие на их датчики сигналы и/или при различии показаний часов на постоянную величину этот способ исключает влияние этих различий на окончательный результат измерения расстояния, т.к. в одном случае эти различия приводят к завышению результата измерения расстояния, а в другом - к такому же занижению, что компенсируется при вычислении среднего арифметического результатов измерений до и после обмена местами приемников. Другими словами, поправка τ после обмена приемников местами меняет знак, поэтому на величину lcp не влияет. Смену мест производят с точностью, превышающей требуемую точность измерения расстояния. Если положение датчиков относительно узлов крепления у приемников отличается, то в данном варианте способа определяется не расстояние между датчиками (которое после обмена местами приемников меняется), а среднее арифметическое расстояний между датчиками до и после переноса приемников, т.е. тот отрезок, на который переносятся приемники при обмене их местами. Последнее имеет место и при использовании неодинаковых приемников.
Без использования двух приемников с высокоточными часами, как это предлагается в настоящем изобретении, а с использованием, например, источника сигнала, фиксирующего момент излучения, и одного приемника с часами [US 3464770], исключить таким приемом τ было бы нельзя.
Влияние индивидуальных особенностей приемников может быть исключено также тем, что первое измерение производят по базовой процедуре (получают 11), а при втором измерении (по той же базовой процедуре) приемники оставляют на прежних местах, а сигнал подают с противоположной стороны измеряемого отрезка, т.е. измерение производят при противоположном направлении распространения сигнала (получают l2). Результат вычисляют как среднее арифметическое двух измерений: l=lcp=(l1+l2)/2. При этом, как и в варианте со сменой мест приемников, исключается влияние τ, но определяется уже именно расстояние между датчиками, поэтому конструкция должна обеспечивать определение положения датчиков с точностью, превышающей требуемую точность измерения расстояния.
Излучение с двух противоположных сторон измеряемого отрезка предлагается подавать следующими способами:
- производят измерения по базовой процедуре при одном положении источника сигнала, а затем переносят этот же источник на другую сторону от измеряемого отрезка и повторяют измерения;
- используют два источника сигнала, расположенные по разные стороны измеряемого отрезка, и производят измерения по базовой процедуре сначала с использованием одного источника, а затем - с использованием другого;
- используют сигнал от одного источника и фиксируют времена детектирования приемниками этого сигнала, а также сигнала, отраженного в обратную сторону отражателем (зеркалом, микроуголковым отражателем и т.п.), который устанавливают по другую от источника сигнала сторону измеряемого отрезка. При этом фиксируется четыре момента времени: два - при распространении сигнала в одну сторону, и два - на обратном пути сигнала. По каждой паре вычисляют расстояние и находят их среднее арифметическое.
При использовании вариантов способа со сменой мест приемников и со сменой направления распространения сигнала ноль отсчет времени у часов может не совпадать - это не повлияет на результат измерения расстояния.
Используя вариант способа со сменой мест приемников или со сменой направления распространения сигнала, определяют величину временной поправки: τ=(l0-lcp)/c, где l0=c·(t2-t1), а lcp определяют по любому из этих вариантов. Это значение τ можно использовать и при измерении других расстояний по базовой процедуре с использованием данных приемников.
Как показано выше, в варианте с обменом местами приемников определяют расстояние переноса, а в варианте со сменой направления сигнала определяют расстояние между датчиками приемников. Для повышения удобства работы можно так отрегулировать положение датчиков относительно установочных узлов приемников, чтобы оба эти способа давали один и тот же результат, т.е. чтобы расстояние между датчиками было равно расстоянию между вехами узлов крепления приемников (см. ниже в описании устройства для осуществления способа). Для этого последовательно применяют способ со сменой мест приемников и способ со сменой направления распространения сигнала, вычисляют разницу полученных результатов, производят уменьшающую эту разницу коррекцию положения датчика относительно его узла крепления и повторяют приведенную выше в этом пункте процедуру до получения приемлемого расхождения результатов, т.е. точности, при которой можно пренебречь величиной τ при использовании этих приемников.
При необходимости получения отрезка (например, эталона) заданной длины устанавливают детекторы по концам отрезка, отмеренного грубо, а затем один или оба приемника перемещают, чередуя эти перемещения с проведением измерения по предлагаемому способу, до получения требуемого отрезка. Зная требуемое расстояние и точно измерив предложенным способом имеющееся (приблизительно равное требуемому) расстояние между приемниками, нетрудно произвести нужную коррекцию положения приемника, например микровинтами.
Для минимизации случайных ошибок - по всем предложенным вариантам способа - измерения повторяют необходимое число раз и результаты подвергают необходимой математической (статистической) обработке.
Для исключения влияния среды (например, при использовании световых сигналов) повторяют измерения на другой частоте излучения и вычисляют истинное расстояние по известным алгоритмам.
Для осуществления предложенного способа определения расстояния (в частности, эталонного) предлагается устройство, включающее источник или источники сигнала заданной формы, приемники с датчиками сигнала и с высокоточными часами с нестабильностью Δt<Δl/c, где Δt - накапливаемая за время измерения неточность определения времени используемыми в приемниках часами, Δl - предельно допустимая ошибка измерения расстояния, с - скорость распространения сигнала, которые снабжены средством для регистрации времени поступления сигналов от датчиков по заданному алгоритму, а также средства, позволяющие установить излучатель (излучатели) и датчики приемников на одной прямой в среде распространения сигнала, и блок управления, включающий средства для съема информации с приемников, обработки (в т.ч. передачи) и отображения информации.
Сигнал может быть как электромагнитным (включая радиоволны, оптическую и рентгеновскую области спектра, гамма-излучение), акустическим (в заданных проводниках сигналов), а также корпускулярным. Соответствующими должны быть источники и датчики.
В варианте, когда все узлы и компоненты приемников выполнены одинаковыми по конструкции и геометрии, а также в варианте с подачей сигнала с двух сторон от измеряемого отрезка, определяемое предложенным способом расстояние является расстоянием между датчиками и, следовательно, между любыми двумя геометрически тождественными точками приемников. Для целей сличения каждый из приемников имеет служащий вехой элемент с конструктивно выделенной любым известным способом точкой, расположение которой относительно датчика одинаково у всех приемников.
Предпочтительными датчиками являются датчики с малой протяженностью чувствительной области вдоль направления распространения сигнала и точно определяемой ее локализацией. В вариантах способа, где определяемым расстоянием является расстояние между датчиками, протяженность чувствительной области датчика должна быть меньше допустимой ошибки при определении длины. Для диапазона радиоволн датчиками могут являться тонкие проволочные или пленочные (плоскости которых перпендикулярны направлению распространения сигнала, а упомянутая протяженность может составлять нанометры) антенны, для которых это требование легко выполняется. В оптической и рентгеновской областях также можно использовать датчики, выполненные по тонкопленочной технологии (например, фотодиоды и фотосопротивления), или микроскопические («точечные») датчики. Для больших расстояний, на определение которых, в основном, и направлено предлагаемое изобретение, проблемы попадания одного датчика в тень от другого при подаче сигнала нет (в частности, и благодаря дифракции сигнала), но, при необходимости, датчики могут быть выполнены прозрачными, например на основе прозрачных (полупрозрачных) полупроводниковых пленок, или могут быть смещены относительно друг друга в поперечном для измеряемого отрезка направлении.
При требуемых, например в метрологии, точностях измерения расстояния существенное значение приобретают уже времена прохождения электрических сигналов в трактах приема и обработки, т.е. размеры электронных элементов и проводников, поэтому наиболее приемлемым является интегральное исполнение тракта от детектора до регистратора времени (в одном чипе, например).
Датчик может иметь также две чувствительные области (например, для фиксирования сигналов с противоположных направлений), но при этом расстояние между этими областями вдоль измеряемого отрезка должно быть точно известно или равно нулю. Такой датчик будем считать далее одним датчиком, а не двумя.
Для создания возможности использования предлагаемого устройства для определения расстояния до подвижных объектов, а также для повышения удобства работы, особенно при больших измеряемых расстояниях, средства съема информации с приемников предлагается выполнить беспроводными.
Для надежного повторения измерения одного и того же отрезка (например, для контроля с помощью других приемников или с целью метрологического сличения) устройство может содержать установочные узлы для точного воспроизведения позицирования приемников, выполненные любым известным способом. Подобное средство необходимо и для осуществления варианта предлагаемого способа со сменой позиций приемников. Так как при этом варианте способа определяемое расстояние равно расстоянию, на которое переносят приемники, то каждый установочный узел для позиционирования приемника должен иметь элемент с выделенной точкой, служащей вехой для точного обозначения края отрезка, причем узлы для позиционирования с вехами должны быть геометрически идентичны между собой с точностью большей, чем требуемая точность определения длины. Точка может быть выделена конструктивно (вершина пирамиды или конуса, например) или может определяться другими элементами конструкции (перекрестие оптической системы и т.п.). При обмене приемников местами расстояние между вехами должно сохраниться с заданной точностью.
Для осуществления варианта предложенного способа, в котором измерение повторяют при противоположном направлении распространения сигнала, а расстояние определяют как среднее арифметическое результатов, полученных при том и другом измерениях, предлагаемое устройство включает второй самостоятельный источник сигналов (не обязательно таких же сигналов, как у первого) или вторичный источник. Вторичным источником здесь назван отражатель сигнала или реизлучатель. Сигнал от первого (самостоятельного) источника проходит через первый датчик (при этом регистрируется время t1), затем проходит второй датчик (при этом регистрируется время t2), попадает на вторичный источник и направляется им обратно, затем, на обратном пути, проходит через второй датчик (при этом регистрируется время t3) и, наконец, через первый (при этом регистрируется время t4). Расстояние определяется по формуле l=lcp=c[(t2-t1)+(t4-t3)]/2=(l1+l2)/2, где l1=c(t2-t1+τ), l2=c(t4-t3-τ), а τ взаимно уничтожаются.
Если вторичным источником служит отражатель, то расстояние от второго датчика до этого отражателя должно быть достаточным для того, чтобы удвоенное время его прохождения сигналом было больше временного разрешения системы регистрации второго приемника (иначе отраженный сигнал не будет регистрироваться приемником, еще не готовым для этого) и больше длительности сигнала, если конструкция датчика и алгоритм срабатывания требуют этого. Для увеличения этого времени в качестве вторичного источника может быть использован реизлучатель с задержкой. Он может быть, в частности, выполнен в виде линии задержки с отражателем. Например, для сигнала оптического диапазона линией задержки может служить достаточно протяженный светопровод с высоким коэффициентом преломления или световод достаточной длины (который можно смотать), а отражателем - торец световода с зеркальным покрытием. Особых требований к стабильности оптических характеристик этих элементов линии задержки нет. Временем задержки будет двойное время прохождения сигналом линии задержки.
Реизлучатель может быть выполнен и в виде излучателя, испускающего сигнал с заданной временной задержкой после попадания на него первичного сигнала. Например, реизлучатель может содержать датчик сигнала (или использовать сигнал с датчика второго приемника), схему задержки и управления, а также излучатель сигнала. Данный вариант предпочтительнее при больших расстояниях, когда отраженный сигнал возвращается слишком ослабленным. В этом варианте реизлучатель может излучать сигнал другого типа или с другими характеристиками, например с другой длиной волны, чем у первичного сигнала.
Сравнение результатов измерения расстояния, полученных по базовой процедуре и с применением способа со сменой направления распространения сигнала (lcp), позволяет, при отсутствии других влияющих на величину τ факторов (среды, например), определить поправку τ: если l=lcp=c(t2-t1+τ), то τ=[lcp-c(t2-t1)]/c.
В качестве поправки используют величину τ(l0-lcp)/c, где l0(t2-t1)/c, а lcp определяют по п.4 или по п.5.
Использование в предлагаемом устройстве в качестве источника электромагнитного сигнала мазера или лазера значительно увеличивает диапазон измеряемых расстояний и упрощает юстировку, т.е. установку датчиков и, если предусмотрено, отражателя или реизлучателя, вдоль луча, используя вспомогательный видимый луч. Импульсному сигналу излучения мазера или лазера придают форму, соответствующую выбранной логике для определения момента регистрации сигнала.
Для уменьшения влияния среды и упрощения конструкций источников и/или датчиков в качестве сигнала используют пучки элементарных частиц. В случае использования γ-частиц скорость сигнала совпадает со скоростью света. В случае же использования, например, α- или β-частиц источник сигнала может, в зависимости от конструкции датчиков и алгоритма идентификации сигнала, содержать средство для формирования посылок с одинаковыми скоростями частиц с точностью, например, до Δс<сΔl/l, где Δс - максимальный разброс скоростей частиц, l - определяемое расстояние, с - скорость распространения сигнала, т.е. в данном случае частиц, Δl -допустимая погрешность измерения расстояния.
Влияние среды (состав, плотность, температура, влажность, неоднородность и т.п.) на скорость распространения в ней электромагнитных волн искажает результаты измерения. Известны способы учета этого влияния [например, US 4355894]. Одним из известных способов исключения связанных с этим ошибок является проведение измерений на двух частотах сигнала и соответствующий расчет [Физическая энциклопедия, «БРЭ». М., 1994, статья «Светодальнометрия»]. Другим известным способом является проведение измерений в среде с хорошо известными параметрами или в вакууме. Оба этих приема легко осуществимы при использовании предлагаемого изобретения. Предлагаемый способ безразличен к частоте сигнала, а многочастотные и перестраиваемые источники, в т.ч. мазеры и лазеры, существуют и доступны - это обеспечивает осуществимость первого приема, т.е. проведения измерений на разных частотах и последующее вычисление расстояния. Поместить датчики приемников, другие их узлы или целиком все устройство в один замкнутый объем (например, в трубу, в т.ч. с прозрачным для сигнала торцом), в котором создан вакуум или создана другая среда (газообразная, жидкая или твердая), не представляется трудной задачей - это обеспечивает осуществимость второго приема, т.е. проведения измерения в заданной среде. Можно также поместить датчики в объем твердотельного проводника сигнала, например «точечные» датчики, ввести в тело световода (волновода), в торец которого вводится сигнал. В последнем случае измеряется оптическая длина пути сигнала в световоде, и если световод не прямолинейный, то измеряться будет оптическая длина пути сигнала в световоде от первого датчика до второго (аналогично и при использовании акустического сигнала, распространяющегося по проволоке).
Расстояние от источника сигнала до первого датчика не влияет на работу устройства и может быть выбрано из конструктивных требований. Например, взаимное расположение излучателя источника и датчика первого приемника (или же целиком источника и/или первого приемника) может быть зафиксировано на общей для них платформе так, чтобы сигнал от источника проходил через первый датчик при любых смещениях платформы и при дальнейшей юстировке устройства их взаимное расположение не менялось, а лишь подбиралось положение, при котором второй датчик оказывался на прямой, проходящей через излучатель сигнала и первый детектор. Аналогичным образом и второй датчик со вторым источником (первичным или вторичным) могут быть зафиксированы относительно друг друга (с тем только отличием, что время возврата сигнала должно быть больше времени возврата приемника в режим приема). Фиксатором взаимного положения источников и приемников могут быть и дополнительные элементы узлов для фиксирования приемников.
Для упрощения юстировки в случае использования второго источника второй датчик предлагается выполнить «точечным», т.е. протяженность чувствительной области которого вдоль возможных направлений сигнала меньше допустимой ошибки измерения, а вторичный источник выполнить в виде обратного отражателя (например, катафота - растра из микроскопических уголковых отражателей и т.п.) большой площади: такой площади, чтобы телесный угол, под которым он виден из точки расположения датчика, перекрывал возможные направления поступления сигнала. Линией задержки при этом может служить расположенный между вторым датчиком и обратным отражателем слой материала с большим коэффициентом преломления сигнала. При этом исполнении достаточно, чтобы сигнал от источника, прошедший через датчик первого приемника, попал на датчик второго приемника, а юстировки зеркала не требуется.
На схеме (см. чертеж) приведена иллюстрация способа в варианте с повторением базовой процедуры при противоположном направлении сигнала. Подробности (включая систему управления источником и приемниками, систему съема, обработки и отображения информации, узлы крепления, вехи, рассеянная часть сигнала и т.д.) не приведены.
Обозначения:
1 - источник сигнала,
2 - первый приемник с часами,
3 - второй приемник с часами,
4 - реизлучатель (зеркало),
5 - датчики сигнала («точечные»),
6 - сигнал (стрелками указаны направления до и после отражения).
Примером конкретного исполнения может служить устройство, в котором:
- источником сигнала служит фемтосекундный лазер с длительностью импульса 10 фс, установленный на расстоянии 1 м перед датчиком первого приемника, излучение которого, для удобства юстировки, продублировано излучением в непрерывном режиме в видимой области спектра;
- два установленных на расстоянии 100 м друг от друга приемника, каждый из которых содержит «точечный» датчик из бескорпусного фотодиода, цезиевые атомные часы, блок регистрации времени по сигналам с датчика, блок преобразования информации и блок беспроводной передачи данных (Wi-Fi);
- функцию узлов точного позицирования выполняют геометрически тождественные друг другу трехточечные опоры, основания которых снабжены направляющими, микрометрическими парами (Конструирование приборов. Под ред. В. Краузе. М., Машиностроение, 1987 г., с.196-198), вехами в виде стальных пирамид и элементами для обеспечения одинаковой ориентации опор с вехами;
- вторичным источником служит серебряное зеркало, установленное на расстоянии 1 м за датчиком второго приемника;
- блоком управления служит ноутбук, снабженный средствами беспроводной связи (Wi-Fi), обеспечивающий, с помощью специализированной программы автоматическое и ручное дистанционное управление источником сигнала, съем информации с приемников, вычисление расстояния по заданным алгоритмам, повтор измерений заданное количество раз или в течение заданного времени, статистическую обработку информации, отображение результатов (кроме измеренного расстояния, это могут быть: параметры сигнала, схема измерений, результаты отдельных измерений, графическое изображение разброса, число измерений, дисперсия, коэффициент преломления среды распространения сигнала, дата, номер, графики, таблицы и т.п.).
Примером использования предлагаемого способа является следующий порядок действий с использованием устройства, описанного выше как пример конкретного исполнения:
- задают на блоке управления (ноутбуке) выбранный вариант способа измерения,
- задают параметры сигнала;
- устанавливают с возможной предварительной точностью узлы позиционирования приемников и обеспечивают одинаковую ориентацию опор с вехами,
- во вспомогательном режиме непрерывного излучения лазера вводят, с помощью механизма узлов позиционирования, в видимый луч лазера датчики приемников и юстируют зеркало (второй источник) так, чтобы отраженный луч совпал с падающим;
- проводят серию измерений при данном положении компонентов устройства: измеряют t1 t2, t3 и t4 (времена, зафиксированные двумя приемниками на пути луча туда и обратно);
- собирают эти результаты и вычисляют l=lcp=c[(t2-t1)+(t4-t3)]/2, усредняют его по проведенному ряду измерений, проводят статистическую обработку;
- повторяют измерения на другой длине волны, по сравнению полученных результатов исключают погрешность, вносимую средой, и вычисляют истинное расстояние между датчиками;
- меняют местами приемники, повторяют все описанные операции и определяют новое расстояние между датчиками, которое может не совпадать с расстоянием между ними до переноса приемников;
- по сравнению результатов измерения расстояний между датчиками до и после переноса приемников производят коррекцию положения датчика относительно приемника для уменьшения или исключения разницы между этими расстояниями и повторяют весь процесс до тех пор, пока эта разница не станет допустимой, т.е. пока τ не станет пренебрежимо малой.
После этого можно считать, в пределах допустимой ошибки, что τ=0 в течение некоторого времени, определяемого экспериментально, т.к. параметры приборов меняются со временем по внешним и внутренним причинам.
После описанной коррекции положения датчиков достаточно измерения при одном направлении сигнала (без измерения при обратном направлении сигнала и без перестановки приемников), чтобы получить расстояние между датчиками: оно будет совпадать с расстоянием между вехами на узлах позицирования, причем и при измерении других расстояний. Т.е. после описанной процедуры любые расстояния описанным устройством можно определять без потери точности при одном направлении сигнала, но только в течение упомянутого выше времени сохранения параметров приборов.
Использование сигналов с длительностью меньше, чем Δl/с, позволяет не заботиться о логике регистрации сигнала и обходиться меньшим числом измерений для набора необходимой статистки. При допустимой погрешности Δ1=1 мкм, длительность импульса должна быть порядка 3 фс.
Предложенный способ измерения расстояния и устройство для его осуществления обеспечивают сведение измерения расстояния к измерению только времени в широком интервале расстояний. В нем максимально исключено использование элементов, влияющих на измеряемый промежуток времени. При этом не требуются какие-либо контрольные эталонные отрезки и нет особых требований к характеристикам излучателей (в т.ч. зеркал и реизлучателей), в частности, не требуется когерентности сигнала. Определение больших расстояний, в т.ч. с субмикронной точностью, которое обеспечивает предлагаемое изобретение, необходимо для использования в спутниковых системах определения координат (в т.ч. для контроля и коррекции систем самих спутников и определяемых коорднат), в других системах навигации, в т.ч. в системах подводной навигации (в случае использования акустического сигнала и соответствующих источников и приемников), для геофизических исследований (сдвиги земной поверхности, перемещение континентов, деформации земной коры, являющиеся предвестниками землетрясений и др.), для измерений в космосе и т.п. При использовании предлагаемого изобретения в варианте с использованием электромагнитного сигнала аппаратная составляющая абсолютной погрешности измерения не зависит от измеряемого расстояния, т.к. скорость света задана точно (в отличие от скорости других сигналов), следовательно, относительная погрешность уменьшается с увеличением измеряемого расстояния (обратная пропорция), что особенно существенно при метрологическом применении изобретения. Предлагаемый способ позволяет также отсеивать переотраженные сигналы, т.к. они приходят позже, т.е. проводить временную селекцию сигналов, что, в частности, повышает помехозащищенность. Предлагаемое устройство для осуществления предлагаемого способа позволяет с высокой точностью решать и обратную задачу: определение скорости сигнала по времени прохождения им известного расстояния от датчика до датчика.
Предлагается также (как частный предельный случай, близкий по логике работы предложенному выше способу и составляющий с ним единый изобретательский замысел) способ измерения расстояния между концами отрезка, заключающийся в том, что измеряют время прохождения сигнала вдоль измеряемого отрезка до установленного в конце отрезка отражателя и обратно, отличающийся от описанного выше аналога [US 4770526] тем, что датчик установлен непосредственно в начале измеряемого отрезка, и определяют именно моменты выхода сигнала на измеряемую дистанцию (t1) и возврата его (t2) без необходимости регулярного введения корректирующих поправок, а расстояние определяют по формуле l=c(t2-t1+τ)/2. Приемник не вносит своего вклада в τ и остается только вклад среды и зеркала. Влияние среды может быть исключено методом повторения измерения на другой частоте сигнала или проведением измерения в вакууме. Вклад, вносимый в ошибку отражателем, определяют с учетом его конструкции (например, многослойное диэлектрическое зеркало имеет толщину сравнимую с допустимой ошибкой измерения, и возникает соответствующая неопределенность местонахождения конца измеряемого отрезка). При определенной однажды поправке τ при заданном положении вехи относительно отражателя или, другой вариант, при определенном однажды положении вехи относительно отражателя при принятом условии τ=0 этот способ также позволяет задавать эталонные расстояния, но не предназначен для использования корпускулярных сигналов и сигналов, эффективное отражение которых связано с техническими трудностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ МОДУЛЯТОР | 2014 |
|
RU2563120C2 |
| ЭКРАН И ОПТИЧЕСКИЙ КОММУТАТОР | 2009 |
|
RU2473936C2 |
| ИСТОЧНИК ИЗЛУЧЕНИЯ, СЛУЧАЙНЫЙ ЛАЗЕР И ЭКРАН | 2013 |
|
RU2644984C2 |
| ОПТИЧЕСКИЙ МОДУЛЯТОР (ВАРИАНТЫ) | 2017 |
|
RU2654828C2 |
| ОПТИЧЕСКИЙ МОДУЛЯТОР | 2017 |
|
RU2655463C2 |
| УСТРОЙСТВО ДЛЯ ВАКУУМНОЙ УКУПОРКИ | 2015 |
|
RU2585472C2 |
| УСТРОЙСТВО ДЛЯ ВАКУУМНОЙ УКУПОРКИ | 2015 |
|
RU2619225C9 |
| ЗАДНЯЯ ПОДСВЕТКА ЖИДКОКРИСТАЛЛИЧЕСКОГО ЭКРАНА (ВАРИАНТЫ) | 2006 |
|
RU2330318C1 |
| ТВЕРДОТЕЛЬНЫЙ ТЕПЛОВОЙ НАСОС И ЖИДКОКРИСТАЛЛИЧЕСКИЙ ЭКРАН С НИМ | 2006 |
|
RU2339062C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МИКРОПРИБОРА | 2009 |
|
RU2425430C2 |
Изобретение относится к измерительной технике и предназначено для прецизионного измерения расстояний. Техническим результатом является прямое высокоточное измерение и задание расстояний, повышение точности измерения больших расстояний, ускорение и упрощение процедуры измерения. Способ измерения расстояния заключается в том, что измеряют время прохождения сигналом заданного отрезка. Датчики приемников, содержащих высокоточные часы с накапливаемой за время измерения ошибкой определения времени располагают на требуемом расстоянии друг от друга. Сигнал заданной формы подают вдоль и извне соединяющего датчики отрезка и определяют время регистрации этого сигнала по заданному алгоритму каждым из приемников. Расстояние определяют на основании формулы l=c(t2-t1+τ), где l - определяемое расстояние, t1 и t2 - время регистрации сигнала первым и вторым приемником соответственно, τ - поправка. Устройство для определения расстояния включает источник сигнала заданной формы, приемники с датчиками этого сигнала, с высокоточными часами, средства для установки излучателя и датчики приемников на одной прямой в среде распространения сигнала, а также блок управления. 2 н. и 27 з.п. ф-лы, 1 ил.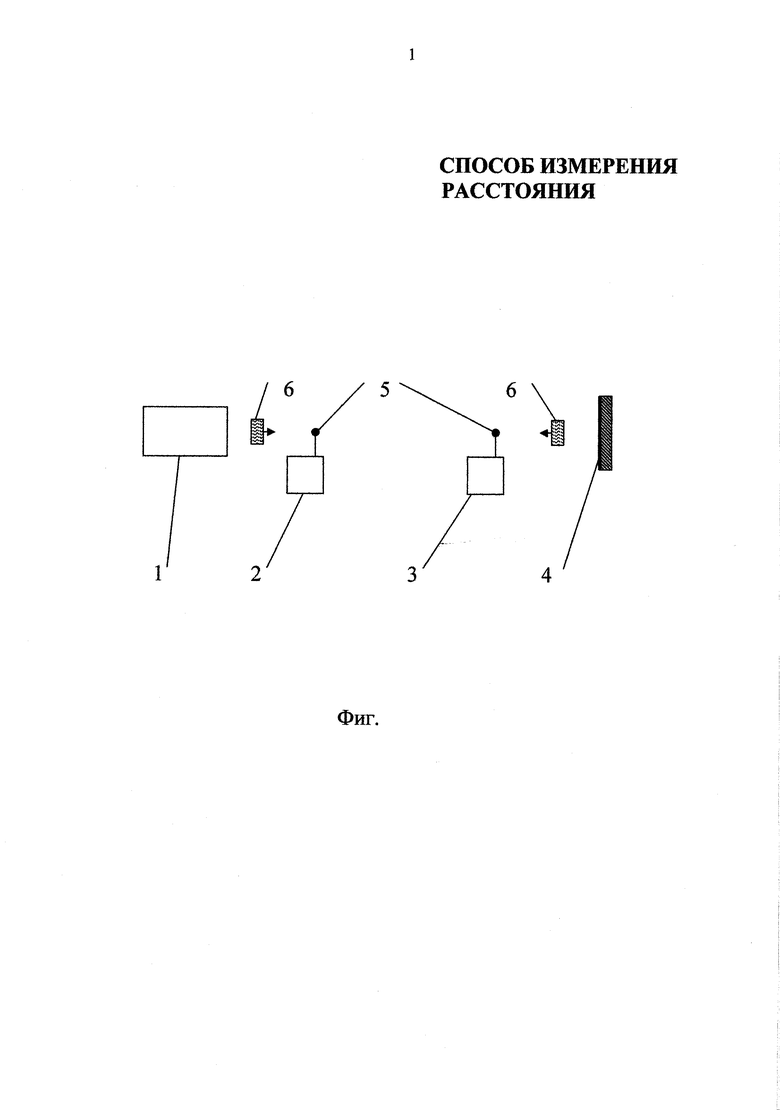
1. Способ измерения расстояния, заключающийся в том, что измеряют время прохождения сигналом заданного отрезка, отличающийся тем, что датчики приемников, содержащих высокоточные часы с накапливаемой за время измерения ошибкой определения времени Δt<Δl/c, где Δl - предельно допустимая ошибка измерения расстояния, с - скорость распространения сигнала, располагают на требуемом расстоянии друг от друга, сигнал заданной формы подают вдоль и извне соединяющего датчики отрезка и определяют время регистрации этого сигнала по заданному алгоритму каждым из приемников, а расстояние определяют на основании формулы l=c(t2-t1+τ), где l - определяемое расстояние, t1 и t2 -время регистрации сигнала первым и вторым приемником соответственно, τ - поправка.
2. Способ по п.1, отличающийся тем, что используют одинаковые по конструкции и геометрии приемники.
3. Способ по пп.1 и 2, отличающийся тем, что часы приемников синхронизируют.
4. Способ по п.1, отличающийся тем, что измерение повторяют, поменяв местами приемники, а расстояние определяют как среднее арифметическое результатов (l=lср), полученных при том и другом расположении приемников.
5. Способ по п.1, отличающийся тем, что измерение повторяют при противоположном направлении распространения сигнала, а расстояние определяют как среднее арифметическое результатов (l=lср), полученных при том и другом направлениях распространения сигнала.
6. Способ по п.1, отличающийся тем, что в качестве поправки используют величину τ=[lcp-c(t2-t1)]/c, где lср определяют по п.4 или 5.
7. Способ по п.4, отличающийся тем, что измерение повторяют при противоположном направлении распространения сигнала, а расстояние определяют как среднее арифметическое результатов (l=lср), полученных при том и другом направлениях распространения сигнала, вычисляют разницу полученных результатов, производят уменьшающую эту разницу коррекцию положения датчика относительно узла его крепления и повторяют проведенную выше процедуру до получения приемлемого расхождения результатов, т.е. точности, при которой можно пренебречь τ.
8. Способ по п.1, отличающийся тем, что один или оба приемника перемещают, чередуя с проведением описанного измерения, до получения требуемой длины отрезка.
9. Устройство для определения (эталонного) расстояния по времени прохождения сигналом заданного отрезка, отличающееся тем, что включает источник или источники сигнала заданной формы, приемники с датчиками этого сигнала, с высокоточными часами, регистрирующими время по сигналам датчиков и с накапливаемой за время измерения ошибкой определения времени Δt<Δl/c, где Δl - предельно допустимая ошибка измерения расстояния, с - скорость распространения сигнала, и средства, позволяющие установить излучатель (или излучатели) и датчики приемников на одной прямой в среде распространения сигнала, а также блок управления, включающий средства для управления источниками, для съема информации с приемников, обработки и отображения информации.
10. Устройство по п.9, отличающееся тем, что средства съема информации с приемников выполнены беспроводными.
11. Устройство по п.9, отличающееся тем, что приемники выполнены одинаковыми по конструкций и геометрии.
12. Устройство по п.9, отличающееся тем, что содержит установочные узлы для точного позицирования приемников.
13. Устройство по п.12, отличающееся тем, что установочные узлы для позиционирования приемников имеют служащие вехами для точного обозначения краев отрезка элементы с выделенной точкой, причем установочные узлы с вехами геометрически идентичны друг другу с точностью большей, чем требуемая точность определения длины.
14. Устройство по п.9, отличающееся тем, что каждый из приемников имеет служащий вехой элемент с выделенной точкой, расположение которой относительно датчика одинаково у обоих приемников.
15. Устройство по п.9, отличающееся тем, что включает два источника с возможностью подачи сигнала с разных сторон измеряемого отрезка.
16. Устройство по п.15, отличающееся тем, что вторым источником служит отражатель сигнала.
17. Устройство по п.15, отличающееся тем, что вторым источником служит реизлучатель сигнала.
18. Устройство по п.17, отличающееся тем, что реизлучатель содержит линию задержки сигнала.
19. Устройство по пп.17 и 18, отличающееся тем, что реизлучатель выполнен в виде линии задержки с отражателем.
20. Устройство по п.9, отличающееся тем, что источник сигнала - радиочастотный.
21. Устройство по п.21, отличающееся тем, что радиочастотным источником служит мазер.
22. Устройство по п.9, отличающееся тем, что источник сигнала - оптический.
23. Устройство по п.22, отличающееся тем, что источником оптического сигнала служит лазер.
24. Устройство по из пп.9, 21-23, отличающееся тем, что источник сигнала способен излучать сигналы по меньшей мере на двух частотах.
25. Устройство по п.9, отличающееся тем, что взаимное расположение излучателя и ближайшего к нему датчика зафиксировано на общей для них платформе так, чтобы сигнал от источника проходил через датчик при любом положении платформы.
26. Устройство по п.9, отличающееся тем, что второй датчик выполнен «точечным», а вторичный источник выполнен в виде обратного отражателя такой площади, чтобы телесный угол, под которым он виден из точки расположения датчика, перекрывал возможные направления поступления сигнала.
27. Устройство по п.9, отличающееся тем, что содержит средство для создания между датчиками требуемой среды (твердой, жидкой, газовой или вакуума).
28. Устройство по п.9, отличающееся тем, что источник сигнала - акустический.
29. Устройство по п.9, отличающееся тем, что источником сигнала является источник элементарных частиц.
| US 2003234869 А1, 25.12.2003 | |||
| US 5880821 А, 09.03.1999 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2267743C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1992 |
|
RU2041481C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ЧАСТОТНОЙ ПОГРЕШНОСТИ ГЕТЕРОДИНА | 2001 |
|
RU2280261C2 |

