Настоящее изобретение относится к электронным цепям. Более конкретно, настоящее изобретение относится к новым и усовершенствованным способу и устройству для компенсации частотной погрешности гетеродина (Г) путем снятия характеристик (Г) во времени.
Прецизионные генераторы частоты жизненно необходимы для работы разнообразных электронных систем и устройств. Генераторы частоты в электронных устройствах используются как тактовые генераторы, а также используются как гетеродины (Г) для настройки электронных устройств на нужные коммуникационные каналы.
Имеется много типов прецизионных генераторов частоты. Конкретный тип генератора частоты для конкретной задачи определяется в соответствии с ограничивающими условиями конкретной задачи. Атомные часы обладают чрезвычайной степенью точности по частоте, однако их размер, стоимость и отсутствие диапазона настройки сильно ограничивают их реальное применение в электронных системах. Аналогично, точные генераторы частоты можно создавать на основе пьезоэлектрического эффекта кристаллов кварца. Небольшой размер и относительная точность генераторов частоты на базе кристаллов кварца делают их популярными для большинства бытовых электронных устройств.
Тип и степень точности генератора частоты определяются в соответствии с задачей. Приемники, используемые в Глобальной Системе Определения Местоположения Абонента (ГСОМА), требуют (Г) с высокой степенью точности, чтобы быстро синхронизироваться и поддерживать синхронизацию с сигналами, передаваемыми на несущих частотах ГСОМА со спутников. Обзор системы ГСОМА поможет пояснить требования к точности частоты (Г) приемника системы ГСОМА.
ГСОМА широко используется для определения координат. ГСОМА определяет положение, используя принципы геометрии. По орбитам вокруг Земли перемещается группировка спутников системы ГСОМА. Приемник может определить свое точное местоположение, зная положения спутников и рассчитывая расстояние от приемника до каждого из множества спутников.
Приемник системы ГСОМА рассчитывает расстояние от спутника до приемника, определяя время, которое требуется сигналу, переданному со спутника, для достижения приемника. Когда приемник определит расстояние до спутника, он «знает», что он находится в геометрическом месте точек, равноудаленных от спутника. Спутник представляется точечным источником, а геометрическим местом точек, равноудаленных от некоторой точки, является сферическая поверхность. Когда приемник определит расстояние до второго спутника, он «знает», что он находится где-то на второй сферической поверхности. Однако количество потенциальных положений сильно сокращается, когда известно расстояние до двух спутников. Это объясняется тем, что приемник находится где-то на пересечении двух сферических поверхностей. Линией пересечения двух сферических поверхностей является окружность. Поэтому приемник «знает», что находится в круге, являющемся плоскостью пересечения. Определение расстояния от приемника до третьего спутника дает третью сферическую поверхность. Третья сферическая поверхность пересекает первые две поверхности, а также пересекает круг, являющийся плоскостью пересечения первой и второй сферических поверхностей. Пересечение трех сферических поверхностей дает две отдельные точки, в которых может находиться приемник. После того как определены две точки, образованные пересечением трех сферических поверхностей, приемник может оценить, которая из этих двух точек является истинным его местоположением, либо приемник может определить расстояние до четвертого спутника.
Приемник может оценить, которая из этих двух точек является истинным его местоположением, после определения расстояния до трех спутников. Это можно сделать, поскольку одна из точек не является вероятным местоположением. Истинной точкой будет та, которая находится у поверхности Земли, тогда как неправильная точка будет расположена либо очень высоко над поверхностью Земли, либо очень глубоко под ее поверхностью. Если определить расстояние до четвертого спутника, будет известно точное положение приемника. Точное положение по четырем спутникам определяется потому, что пересечение четырех сферических поверхностей дает только одну точку.
Основной проблемой в реализации глобальной системы позиционирования является точное определение расстояния от спутника до приемника. Расстояние от спутника до приемника рассчитывают, измеряя время прохождения сигнала от спутника до приемника. Каждый спутник передает две несущие частоты, каждая из которых модулируется уникальным псевдослучайным кодом. Одна из несущих работает на частоте 1575,42 МГц, а вторая работает на частоте 1227,60 МГц. Приемник демодулирует принятый сигнал для извлечения псевдослучайного кода. Локально генерируемый псевдослучайный код синхронизируется с демодулированным псевдослучайным кодом. Задержка между двумя псевдослучайными кодами представляет время прохождения переданного сигнала. Затем можно определить расстояние до спутника, умножая время прохождения сигнала на скорость света.
Все передающие спутники синхронизированы по времени. Однако мобильный приемник лишь слабо синхронизирован со спутниками. Эта слабая синхронизация приемника со спутниками вводит ошибки в расчет положения. Как указано выше, определенное время прохождения соответствует определенному расстоянию. Геометрическим местом точек, равноудаленных от какой-либо точки, является сферическая поверхность с радиусом, равным этому расстоянию. Однако если известно лишь, что время прохождения лежит в пределах определенного временного интервала, то есть измеренное время плюс/минус некоторая ошибка, то и расстояние будет определено в пределах соответствующего интервала величин. Толщина сферической оболочки равна ошибке в измеренном расстоянии. Пересечение трех сферических оболочек, каждая из которых соответствует оценочному расстоянию до отдельного спутника, дает два тела, одно из которых представляет положение приемника. Вспомним, что в случае дискретных расстояний пересечение трех сферических поверхностей дает две точки, а не два тела.
Проблема временной синхронизации отчасти решается измерением расстояния до четвертого спутника. Во-первых, ошибке синхронизации присваивается предполагаемое значение, которое может быть равно даже нулю. Затем определяют расстояние до трех спутников. Как объяснялось выше, пересечение трех сферических поверхностей, определенных по результатам измерений этих трех расстояний, дает две отдельные точки, одна из которых является положением приемника. Расстояние до четвертого спутника определяет четвертую сферическую поверхность. Идеально, в случае отсутствия ошибки синхронизации четвертая сферическая поверхность пересекается с остальными тремя сферическими поверхностями только в одной точке. Однако если имеется ошибка синхронизации, четыре сферические поверхности не пересекаются. Ошибки синхронизации между спутниками нет. Поэтому ошибка синхронизации между приемником и одним из спутников одинакова с ошибкой синхронизации между приемником и любым из спутников группировки. Ошибку синхронизации можно определить, изменяя величину предполагаемой ошибки синхронизации. Ошибка синхронизации определяется, когда четыре сферические поверхности пересекутся в единственной точке.
Ошибка синхронизации - это только одна из проблем, которые требуют внимания при определении положения с помощью системы ГСОМА. Приемник ГСОМА, определяющий положение, должен иметь небольшие физические размеры и относительно низкую стоимость. Ограничения по размерам и стоимости становятся все более важными, когда приемник системы ГСОМА реализуется в приборе, рассчитанном на бытовое применение. К новым требованиям к беспроводным телефонам относится способность определения местоположения вызывающего абонента. Знание конкретного местоположения звонящего важно в случае звонков в службы спасения, например в США - в службу 911. Тем не менее, несмотря на физические ограничения, приемник должен быстро отыскивать и принимать спутниковые сигналы.
В конструкции приемника должен быть найден компромисс между стоимостью, чувствительностью к принимаемому сигналу и временем поиска. В конструкции приемника нельзя вывести на максимум все параметры одновременно. Существенные улучшения чувствительности приемника или времени поиска приводят к увеличению стоимости.
Основным фактором, усложняющим поиск и прием спутникового сигнала, является погрешность частоты, вносимой гетеродином (Г) приемника. (Г) используется в приемнике для понижающего преобразования принятого сигнала в узкополосный сигнал. Затем узкополосный сигнал подвергается обработке. В случае сигнала, принимаемого со спутника системы ГСОМА, узкополосный сигнал коррелирует со всеми возможными псевдослучайными кодами для определения, от какого спутника пришел сигнал определения времени прохождения сигнала. Процесс поиска и приема сильно усложняется частотной погрешностью (Г). Любая частотная погрешность, вносимая (Г), создает дополнительное пространство поиска, которое следует охватить. Более того, частотная погрешность (Г) представляет отдельное расстояние, в котором нужно измерять время прохождения. Таким образом, пространство поиска увеличивается с увеличением частотной погрешности, поскольку поиск времени прохождения следует проводить во всех возможных частотных погрешностях.
Реальная или обнаруженная частотная погрешность (Г) определяется многими параметрами. На частоту (Г) влияют температура цепи и перепад температур на печатной плате. Кроме того, стабильность опорной частоты, используемой для (Г), непосредственно влияет на частотную стабильность (Г). Дополнительный вклад в частотную погрешность вносит доплеровский сдвиг, вызванный скоростью перемещения приемника. Даже в ситуациях, когда (Г) приемника идеально точен, могут возникнуть частотные погрешности, вызванные доплеровским эффектом. Такой эффект может внести очевидное увеличение или очевидное уменьшение частоты, передаваемой со спутника. Хотя и спутниковый (Г), и (Г) приемника могут быть идеально стабильными, сигнал на приемнике может иметь очевидный сдвиг по частоте. Доплеровский сдвиг, вызванный перемещением приемника, в самом приемнике не корректируется и дополняет частотную погрешность, уже имеющуюся в приемнике.
Необходим способ уменьшения частотной погрешности (Г) для уменьшения области поиска, которая должна быть охвачена при обработке узкополосного сигнала. Сокращение области поиска пространства позволяет снизить сложность поиска, что в свою очередь позволяет повысить чувствительность приемника и уменьшить время поиска и приема.
Настоящее изобретение представляет собой новый и усовершенствованный способ и устройство для уменьшения частотной погрешности гетеродина (Г) путем снятия характеристик (Г) во множестве рабочих условий и введения компенсации в (Г) в соответствии с рабочими условиями.
При работе в первом режиме приемник использует внешний источник частоты, имеющий небольшую частотную погрешность. Приемник использует этот внешний источник как генератор опорной частоты. Используя внешний источник как генератор опорной частоты, приемник оценивает частотную погрешность (Г). Одновременно с оценкой частоты приемник следит за различными заранее определенными параметрами, которые влияют на точность и частотную стабильность (Г). Примерами параметров, влияющих на точность (Г), являются рабочая температура и перепады температур на печатной плате. Величины отслеживаемых параметров и частота (Г) вводятся в ячейки запоминающего устройства. Альтернативно, частотная погрешность может храниться в форме таблицы. Это позволяет получить последовательность таблиц данных, характеризующих (Г).
(Г) можно переключить на второй режим повышенной точности, при котором выходную частоту (Г) регулируют для уменьшения частотной погрешности. Во втором режиме повышенной точности приемник больше не использует внешний источник частоты. Приемник продолжает отслеживать заранее определенные параметры, которые использовались для характеризации (Г). Затем приемник использует текущие результаты и сравнивает их с измеренными величинами, ранее введенными в запоминающее устройство. Затем на базе предыдущей характеризации вводится коррекция (Г) для исправления оцененной ошибки.
В альтернативном варианте погрешность частоты вводится в приемник так, чтобы можно было упростить процесс приема сигнала. В другом варианте (Г) работает в режиме повышенной точности, где частотная погрешность компенсируется на выходе (Г), но информация о погрешности также передается в приемник. В еще одном варианте первый режим, при котором характеризуется частотная погрешность, работает одновременно со вторым режимом.
Признаки, цели и преимущества настоящего изобретения будут более понятны из нижеследующего подробного описания со ссылками на чертежи, где одинаковыми позициями обозначены одинаковые компоненты и на которых:
фиг.1 - блок-схема приемника;
фиг.2 - блок-схема гетеродина;
фиг.3 - схема, иллюстрирующая пространство поиска;
фиг.4 - блок-схема приемника с характеризацией (Г);
фиг.5 - блок-схема альтернативного варианта приемника с характеризацией (Г);
фиг.6А-6В - алгоритм процесса характеризации (Г) и
фиг.7 - алгоритм процесса компенсации (Г).
На фиг.1 приведена блок-схема общего приемника 100. Антенна 102 служит интерфейсом между передаваемыми сигналами и приемником 100. Антенна 102 настраивается на оптимальный прием сигналов, передаваемых в L-диапазоне (300-1550 МГц), когда приемник используется как приемник системы ГСОМА. Для приемника ГСОМА источником передаваемых сигналом является орбитальная группировка спутников ГСОМА. Сигналы, принятые антенной 102, подаются на понижающий преобразователь 110. Понижающий преобразователь 110 преобразует радиосигналы, принятые антенной 102, в узкополосные сигналы, которые в дальнейшем обрабатываются. Основными компонентами понижающего преобразователя 110 являются смесители 112 и гетеродин (Г) 114. Понижающий преобразователь 110 также может содержать фильтры и усилители (не показаны) для повышения качества полученного узкополосного сигнала. Принятый сигнал подается от антенны 102 на смеситель 112 в понижающем преобразователе 110. Производимые в понижающем преобразователе 110 фильтрация или усиление сигнала не показаны для упрощения блок-схемы и ее функциональных компонентов. Смеситель 112 эффективно умножает принятый сигнал на сигнал (Г) 114. Полученный на выходе сигнал смесителя 112 центрирован на двух первичных частотах. Одна частотная составляющая выходного сигнала смесителя 112 центрирована на сумме центральной частоты принятого сигнала и рабочей частоты (Г) 114. Вторая частотная составляющая выходного сигнала смесителя 112 центрирована на разности между центральной частотой полученного сигнала и рабочей частотой (Г). В понижающем преобразователе 110 используются два смесителя 112-113, когда принимаемый сигнал подвергается квадратурной модуляции. Принятый сигнал подается на вход обоих смесителей 112-113. На второй вход первого смесителя 112 подается сигнал (Г) 114. На второй вход второго смесителя 113 подается сигнал (Г) 114, смещенный на 90 градусов в фазовращателе (не показан). Полученный выходной сигнал первого смесителя 112 обозначен как инцидентный фазовый выход (I), а полученный выходной сигнал второго смесителя обозначен как квадратурный фазовый выход (Q).
Выходные сигналы I и Q понижающего преобразователя 110 подаются на соответствующие фильтры 122 и 124, которые используются для удаления нежелательных частотных составляющих из смесителей 112-113 и для предварительного формирования сигнала пониженной частоты перед последующей его обработкой.
Прошедшие фильтр сигналы I и Q подаются на банк корреляторов 130. Корреляторы 130 обрабатывают сигналы I и Q, используют технологии цифровой обработки. Корреляторы 130 оцифровывают сигналы I и Q в аналого-цифровых преобразователях (АЦП), что необходимо для их дальнейшей обработки. Корреляторы 130 используются для определения сдвига по фазе принятых со спутников сигналов, когда приемник 100 используется для определения положения в системе ГСОМА. При первом включении приемник не имеет заранее введенных сведений о своем местоположении. Приемник 100 определяет свое исходное местоположение, проводя поиск по всем возможным псевдослучайным кодам, передаваемым каждым спутником. Кроме того, приемник 100 должен провести поиск среди всех возможных фаз всех возможных псевдослучайных кодов. Этот поиск производится множеством корреляторов, работающих параллельно для сокращения времени поиска, затрачиваемого приемником 100. Каждый коррелятор работает на одной псевдослучайной последовательности. Коррелятор пытается определить фазовый сдвиг внутренне генерируемого псевдослучайного кода относительно кода, принятого со спутника. Псевдослучайные коды, которые не соответствуют спутниковому сигналу, не имеют корреляции из-за случайной природы кодов. Кроме того, правильный псевдослучайный код не имеет корреляции с принятым сигналом, если фазы сигналов этих двух кодов не совпадают. Таким образом, корреляторы 130 определяют корреляцию в том корреляторе, где псевдослучайный код совпадает с кодом принятого сигнала, когда фазы двух сигналов также совпадают.
Результаты коррелятора подаются на пиковый детектор 140. Множество корреляторов работают параллельно и одновременно выдают результаты на пиковый детектор 140. Пиковый детектор 140 определяет наиболее вероятные псевдослучайные коды и фазовые сдвиги для принятых сигналов.
В системе ГСОМА для каждого из спутников используются ортогональные коды. Это позволяет всем спутникам одновременно осуществлять передачу на одной частоте. Таким образом, на приемник одновременно приходит информация от множества источников. Множество корреляторов 130 работают независимо друг от друга и могут определить фазу принятого псевдослучайного кода в присутствии других ортогональных кодов. Следовательно, пиковый детектор 140 одновременно получает номера корреляции, идентифицирующие множество псевдослучайных кодов и фазовый сдвиг для этих кодов. Поскольку каждому спутнику присвоен псевдослучайный код, идентификация псевдослучайного кода означает идентификацию спутника, являющегося его источником. Кроме того, определение фазового сдвига кода определяет время прохождения этого сигнала. Процессор 150 анализирует информацию, поступающую от пикового детектора 140, для расчета положения приемника 100. Одновременное определение псевдослучайного кода и фазовых сдвигов кодов позволяет процессору 150 оценивать положение приемника по мере обновления данных на пиковом детекторе 140.
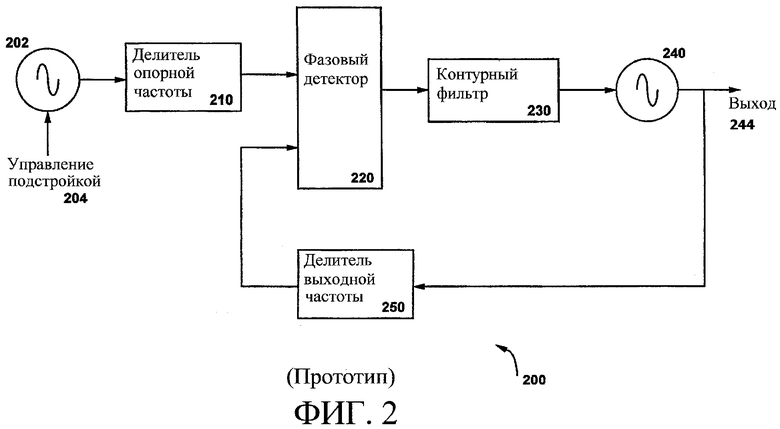
Однако процесс поиска осложняется, если частота (Г) 114 в понижающем преобразователе 110 неточна. На фиг.2 показана блок-схема типичного (Г) 200 с системой фазовой автоподстройки частоты (ФАПЧ). Задающий генератор 202 частоты используется в качестве генератора опорной частоты для системы ФАПЧ. Задающий генератор 202 частоты может быть генератором с фиксированной частотой или стабилизированным генератором с управлением по напряжению (ГУН) с небольшим диапазоном настройки. В мобильных телефонах в качестве задающего генератора 202 частоты может использоваться кристаллический генератор с температурной компенсацией и управлением по напряжению (VCTCXO, Voltage Controlled Temperature Compensated Crystal Oscillator). Если в качестве задающего генератора 202 частоты используется ГУН, используется линия 204 управления подстройкой опорной частоты.
Выход задающего генератора 202 частоты подается на делитель 210 опорной частоты. Делитель 210 используется для понижения частоты задающего генератора 202 частоты. Это важно, поскольку выходная частота системы ФАПЧ пропорциональна частоте на входе фазового детектора 220. Выход делителя 210 подается на один вход фазового детектора 220.
Генератор 240 с управлением по напряжению генерирует выходной сигнал 244 системы ФАПЧ. Генератор 240 должен быть способен настраиваться в требуемом частотном диапазоне системы ФАПЧ. Напряжение, подаваемое на управляющую линию генератора 240, задает рабочую частоту. Выходной сигнал 244 системы ФАПЧ может использоваться как входной сигнал для смесителей в понижающем преобразователе. Выходной сигнал 244 системы ФАПЧ также подается на вход выходного делителя 250. Выходной делитель 250 масштабирует частоту выходного сигнала 244 так, что частота на входе фазового детектора 220 (масштабированный выходной сигнал задающего генератора 204), умноженная на масштабный коэффициент выходного делителя 250, дает требуемую выходную частоту. Выходной сигнал выходного делителя 250 подается на второй вход фазового детектора 220.
Фазовый детектор 220 сравнивает выходной сигнал задающего делителя 210 с выходным сигналом выходного делителя 250 и генерирует на выходе сигнал ошибки. Сигнал ошибки, выходящий с фазового детектора 220, подается на контурный фильтр 230. Контурный фильтр 230 ограничивает полосу сигнала ошибки, поступающего от фазового детектора 220. Выходной сигнал контурного фильтра 230 используется как управляющее напряжение для генератора 240 с управлением по напряжению. Таким образом, очевидно, что точность выходного сигнала 244 системы ФАПЧ определяется точностью задающего генератора 202 частоты.
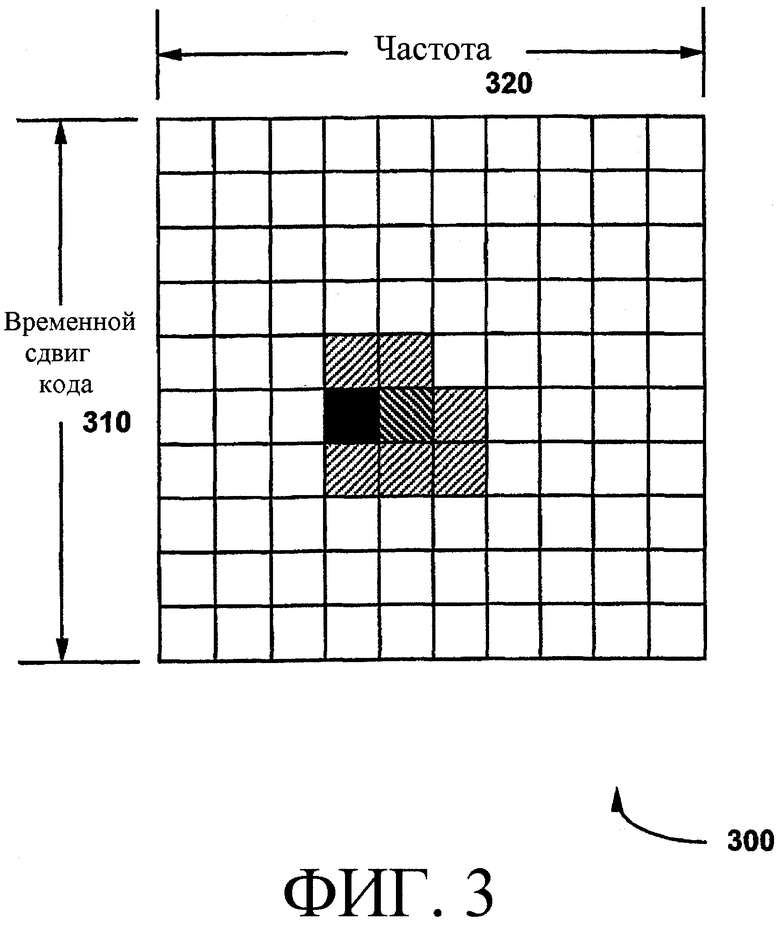
Частотные погрешности (Г) осложняют процесс поиска. Полная область 300 поиска, которую должен охватить каждый коррелятор, показана на фиг.3. Каждый коррелятор в приемнике системы ГСОМА должен вести поиск среди всех вероятных временных сдвигов кода. На фиг.3 область 310 поиска временных сдвигов кода показана как вертикальная область поиска. Каждый элемент дискретизации в области 310 поиска представляет наименьшую определяемую разность фаз. Небольшая длина псевдослучайного кода, используемая в системе ГСОМА, составляет 1023 бит. Область 310 поиска временных сдвигов кода должна перекрывать все потенциальные фазы кода, если псевдослучайная природа кода приводит к пренебрежимо малой корреляции для всех сдвигов фазы, превышающих 0. Поэтому в области 310 поиска для однозначной идентификации псевдослучайного кода требуется, по меньшей мере, 1023 элемента дискретизации.
Из фиг.3 видно, что увеличение области 320 поиска частоты пропорционально увеличивает общую область 300 поиска. Область 320 поиска частоты представляет дополнительную поисковую размерность, поскольку частотная погрешность является взаимно исключающей с любой фазовой ошибкой кода. Каждый элемент дискретизации в области 320 поиска частоты представляет минимально определяемый частотный диапазон. Размер этого минимально определяемого диапазона частот является функцией от количества замеров и общего времени интеграции. Минимально определяемый частотный диапазон уменьшается с увеличением общего времени интеграции. Кроме того, для получения требуемого определяемого частотного диапазона необходимо достаточное количество замеров. Увеличение дрейфа (Г) приводит к увеличению области 320 поиска частоты.
Приемник коррелирует результаты замеров в каждом элементе дискретизации полной области 300 поиска. Успешные результаты накапливаются для еще большего улучшения отношения сигнал/шум принятого сигнала. Дрейф частоты (Г) приводит к тому, что накопление происходит в нескольких элементах дискретизации, соответствующих дрейфу частоты. Это «размазывание» сигнала показано на фиг.3 в форме нескольких заштрихованных элементов дискретизации. (Г), в котором дрейф частоты отсутствует, дает накопление в одном единственном элементе дискретизации. Это значительно улучшает идентификацию сигнала за счет лучшего отношения сигнал/шум.
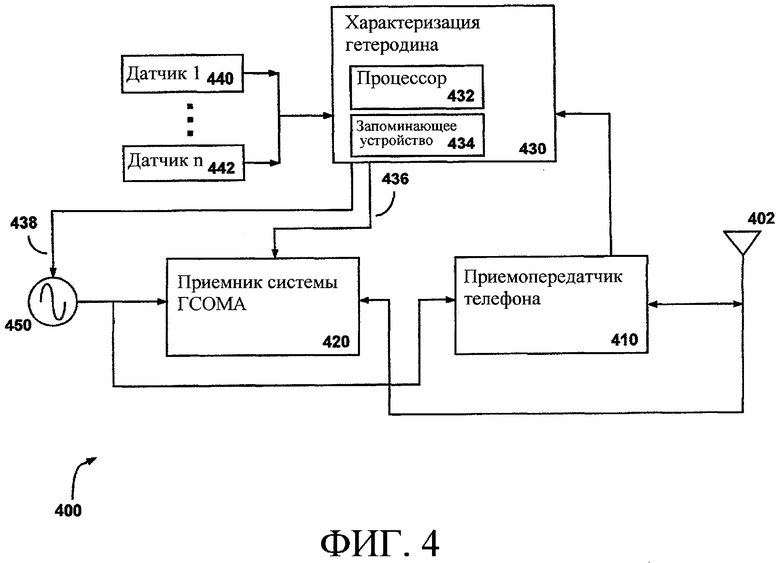
На фиг.4 показана блок-схема цепи стабилизации (Г) в беспроводном телефоне 400, имеющем функцию ГСОМА. Беспроводной телефон 400 содержит встроенный телефонный приемопередатчик 410, который обеспечивает коммуникации по системе беспроводной телефонной связи. Телефон 400 также содержит встроенный приемник системы ГСОМА, позволяющий определять местоположение. В варианте, показанном на фиг.4, беспроводной телефон 400 работает либо в режиме телефона, либо в режиме приемника системы ГСОМА, одновременно оба режима работать не могут. Однако если в телефоне 400 имеются достаточные вычислительные мощности, и телефонный режим, и режим определения местоположения могут работать одновременно.
Радиочастотные сигналы (РЧС) подаются на телефон и уходят от телефона через антенну 402. К РЧС, проходящим через антенну 402, относятся и входящие, и выходящие сигналы телефонного приемопередатчика 410, и принимаемые сигналы для приемника 420 системы ГСОМА. В варианте, показанном на фиг.4, приемник 420 системы ГСОМА и телефонный приемопередатчик 410 используют один и тот же (Г) 450. Как обсуждалось выше, неточность (Г) 450 приводит к увеличению области поиска для приемника 420 системы ГСОМА. Поэтому в варианте, показанном на фиг.4, для характеризации (Г) 450 используется информация, полученная телефонным приемопередатчиком 410 так, что, когда приемник 420 системы ГСОМА выполняет поиск, частотная погрешность (Г) 450 минимизируется.
Для характеризации внутреннего (Г) 450 на беспроводной телефон 400 подается внешний сигнал, имеющий высокую частотную стабильность. В беспроводных системах, таких как множественный доступ с кодовым разделением каналов (МДКРК) определенной в стандарте 95-В Ассоциации промышленности средств связи (TIA)/Ассоциации электронной промышленности (EIA) СТАНДАРТ СОВМЕСТИМОСТИ МОБИЛЬНЫХ И БАЗОВЫХ СТАНЦИЙ ДЛЯ ДВУХМОДОВЫХ СИСТЕМ С РАСШИРЕННЫМ СПЕКТРОМ, базовыми станциями непрерывно передаются сигналы. Эти сигналы, которые непрерывно передаются базовыми станциями, включают контрольный канал и канал синхронизации. Оба этих сигнала имеют высокую частотную стабильность, и любой из них может использоваться как внешний опорный сигнал, необходимый для характеризации (Г) 450.
Беспроводной телефон 400, предназначенный для работы в системе МДКРК, например, описанной в стандарте 95-B TIA/EIA, содержит встроенный в приемник искатель, который непрерывно определяет присутствие контрольных сигналов. В беспроводном телефоне 400 приемник, входящий в состав приемопередатчика 410, принимает контрольный сигнал, передаваемый базовой станцией (не показана).
Беспроводной телефон 400 способен использовать наличие контрольного сигнала для улучшения приема сигналов в режиме ГСОМА. Приемник использует стабильный по частоте контрольный сигнал как внешний опорный сигнал для определения частотной погрешности (Г) 450. Частотная погрешность, определенная приемником, подается на цепь 430 характеризации гетеродина. Кроме того, по всему беспроводному телефону 400 распределены датчики 440, 442, отслеживающие факторы, влияющие на частотную погрешность (Г) 450. Датчики 440, 442 могут отслеживать факторы, к которым помимо прочих относятся температура, перепады температуры, работа высокочастотного усилителя мощности, рабочий цикл высокочастотного усилителя мощности, напряжение аккумулятора, накопленное время работы, влажность или любые другие переменные, которые влияют на частотную погрешность (Г) 450. Датчик 440 подает сигнал на цепь 430 характеризации гетеродина. Множество оцифрованных величин, соответствующих показаниям датчика 440, усредняются, и полученная средняя величина вносится в массив в запоминающем устройстве 434. Если датчик 440 выдает аналоговый сигнал, цепь 430 характеризации гетеродина оцифровывает этот сигнал прежде, чем он будет усреднен, и вводит усредненную величину в запоминающее устройство 434. Если датчик 440 выдает цифровую величину, то цепи 430 характеризации гетеродина не требуется далее кондиционировать сигнал, и усредненная величина просто вводится в запоминающее устройство. Процессор 432, образующий часть цепи 430 характеризации гетеродина, выполняет функцию усреднения.
Цепь 430 характеризации гетеродина также усредняет множество показаний частотной погрешности, определенных приемопередатчиком 410 телефона. Усредненный показатель частотной погрешности запоминается в запоминающем устройстве 434 и ассоциируется с соответствующими усредненными данными датчиков 440-442. Таким образом, каталогизируется «снимок» рабочей среды и соответствующей частотной погрешности (Г) 450. Цепь 430 характеризации гетеродина продолжает накапливать показания датчика 440 и данные о соответствующей частотной погрешности во время работы устройства в режиме беспроводного телефона. Когда беспроводной телефон 400 работает в режиме приемника системы ГСОМА, цепь 430 характеризации гетеродина использует ранее введенные в память показания датчика 440 и информацию о частотной погрешности, чтобы помочь приемнику 420 системы ГСОМА в приеме сигнала.
Для того чтобы помочь в приеме сигнала ГСОМА, цепь 430 характеризации гетеродина считывает величины каждого из датчиков 440-442. Затем процессор 432 сравнивает текущие величины на датчиках 440-442 с массивом ранее сохраненных данных. Вероятная погрешность (Г) 450 определяется, когда текущие данные датчиков 440-442 соответствуют данным, ранее введенным в запоминающее устройство. Таким образом, цепь 430 характеризации гетеродина определяет вероятную частотную погрешность (Г) 450. Затем цепь 430 характеризации гетеродина генерирует сигнал ошибки, который подается на управляющую линию 438 (Г) для компенсации частотной погрешности. В одном варианте сигнал ошибки преобразуется из цифрового в аналоговый и подается на (Г) с использованием в качестве цифроаналогового преобразователя супердискретизирующего дельта-сигма модулятора с большим динамическим диапазоном. Цепь 430 характеризации гетеродина альтернативно может посылать значение частотной погрешности на приемник 420 системы ГСОМА по информационной шине 436. Знание частотной погрешности позволяет приемнику 420 системы ГСОМА сузить область поиска и получить сигнал с меньшим количеством вычислений. Цепь 430 характеризации гетеродина альтернативно может комбинировать эти две коррекции. Цепь 430 характеризации гетеродина может указывать приемнику 420 системы ГСОМА на величину частотной погрешности при первоначальном включении режима ГСОМА, а затем может корректировать любой дрейф частоты, выдавая сигнал по управляющей линии 438 (Г), пока телефон 400 остается в режиме приемника ГСОМА. Активная коррекция частотного дрейфа (Г) 450 минимизирует размазывание сигнала, возникающее при дрейфе частоты (Г) 450, по множеству элементов дискретизации при накоплении последовательных корреляций.
Компенсация частотной погрешности (Г) 450 с помощью сигнала, передаваемого по управляющей линии 438, может осуществляться на (Г) 200 с системой ФАПЧ, как показано на фиг.2. Возвращаясь к фиг.2, вспомним, что выходная частота 244 пропорциональна выходу задающего генератора 202 частоты. Поскольку коэффициент усиления ГУН задающего генератора 202 известен, можно определить изменение выходной частоты 244 для данного изменения регулировочного напряжения 204. Таким образом, цепь 430 характеризации гетеродина по фиг.4 может рассчитывать напряжение для привода линии 204 регулировки (Г) 200 с системой ФАПЧ для компенсации установленной частотной погрешности.
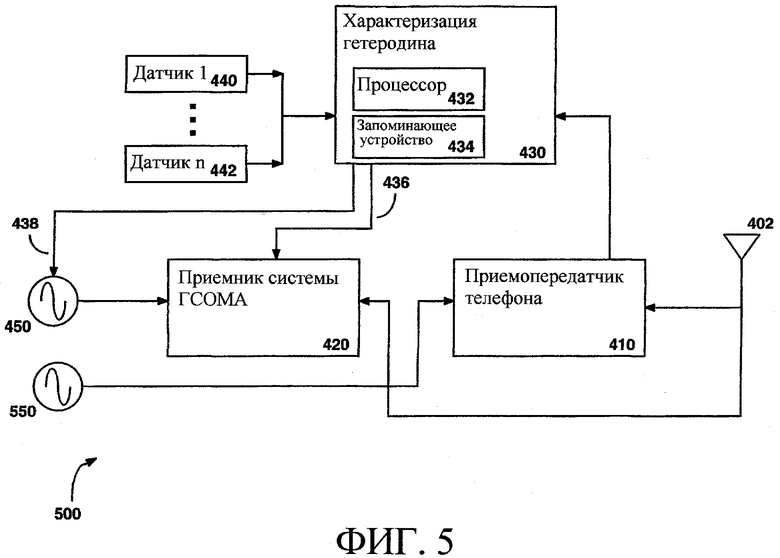
Альтернативный вариант беспроводного телефона 500 показан на фиг.5. Беспроводной телефон 500 по фиг.5 содержит и телефонный приемопередатчик 410, и приемник 420 системы ГСОМА, как описано выше. Однако в беспроводном телефоне 500 по фиг.5 телефонный приемопередатчик 410 использует первый (Г) 550, отделенный от приемника 420 системы ГСОМА, или второй (Г) 450. Здесь термины «первый» и «второй» используются для различения гетеродинов, используемых в телефонном приемопередатчике 410 и в приемнике 420 системы ГСОМА. Термины «первый (Г)» и «второй (Г)» не используются для описания множества гетеродинов, применяемых в приемнике, требующем многочисленных частотных преобразований. Работа цепи 430 характеризации гетеродина несколько отличается, поскольку используются два отдельных гетеродина 450 и 550. Телефонный приемопередатчик 410 может непрерывно принимать контрольный сигнал и выдавать информацию о соответствующей частотной погрешности на цепь 430 характеризации гетеродина. Частотная погрешность первого (Г) 550 телефонного приемопередатчика 410 по существу используется как «заместитель» частотной погрешности второго (Г) 450 приемника 420 системы ГСОМА. Когда используются два (Г) 450 и 550, беспроводному телефону 500 не требуется работать в отдельных режимах телефона и приемника ГСОМА, если в нем имеются достаточные вычислительные мощности. Вместо этого система характеризации частотной погрешности работает независимо и одновременно для коррекции частотной погрешности второго (Г) 450 приемника 420 системы ГСОМА.
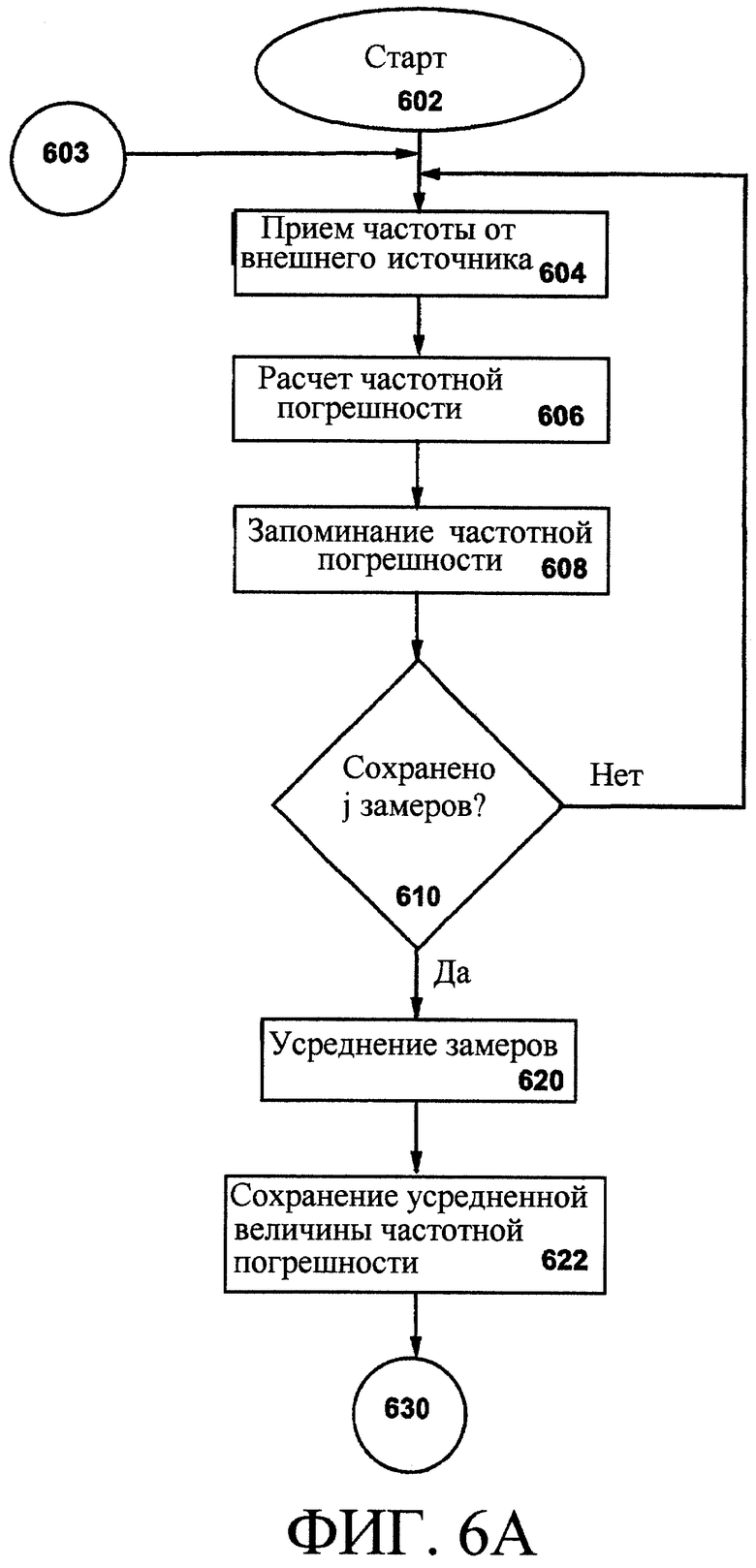
На фиг.6А и 6В показана блок-схема процесса характеризации (Г). Как показано на фиг.6А, процесс начинается с блока 602. Блок 602 может представлять начало процесса характеризации (Г) управляющим процессором. После того как процесс запущен, алгоритм переходит к блоку 604, где осуществляется прием от внешнего источника частоты. Сигнал от внешнего источника частоты может вводиться в приемник или передаваться через эфир, как описано в отношении приемника по фиг.4 или 5. Внешний источник частоты используется в блоке 606 как источник опорной частоты для расчета погрешности (Г). Если в качестве внешнего источника частоты используется контрольный сигнал МДКРК, частотную погрешность (Г) определяет приемник МДКРК. Алгоритм переходит к блоку 608 и вводит в запоминающее устройство величину частотной погрешности, определенную в блоке 606. Далее алгоритм переходит к блоку 610 принятия решения, где определяется, было ли сохранено заранее определенное число j замеров частотной погрешности. Заранее определенное число j представляет число замеров, которые усредняются. Это число может находиться в диапазоне от единицы до максимума, определяемого производительностью аппаратных средств и временными ограничениями устройства. Если сохранено число замеров, меньшее, чем j, алгоритм возвращается к блоку 604 для проведения дополнительных замеров. После сохранения заранее определенного числа замеров j алгоритм переходит к блоку 620, где происходит усреднение результатов j замеров частотной погрешности. В альтернативном варианте может рассчитываться скользящее среднее частотной погрешности. Преимуществом скользящего среднего является способность характеризации частоты (Г) по очень длительным периодам времени. Недостаток заключается в том, что скользящее среднее может иметь замедленную реакцию на изменения в рабочей среде, которые приводят к частотной погрешности (Г).
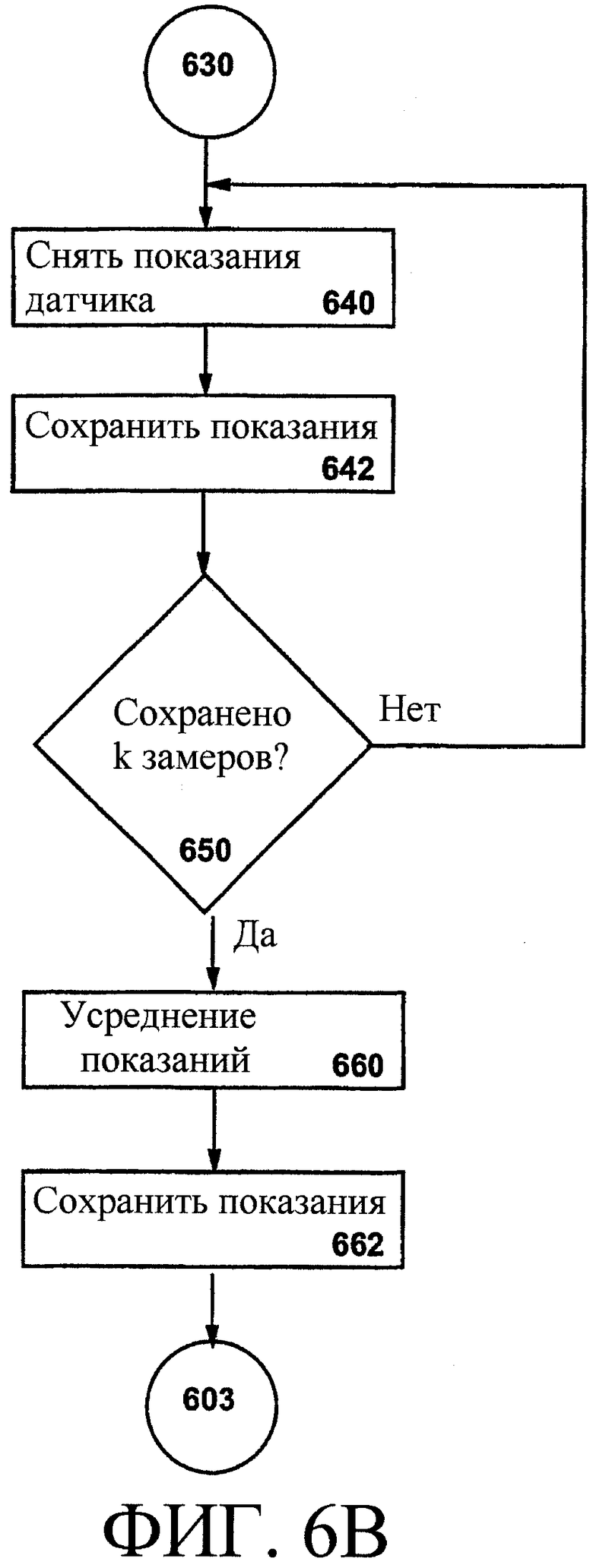
После усреднения замеров алгоритм переходит к блоку 622, где средняя величина частотной погрешности вводится в запоминающее устройство. После этого алгоритм переходит к точке 630. Точка 630 не представляет функцию алгоритма. Она используется просто для связи фиг.6А с фиг.6В. Продолжение работы алгоритма представлено на фиг.6В, где в блоке 640 считываются показания датчиков. Требуются показания, по меньшей мере, одного датчика, и верхний предел показаний датчика ограничивается только количеством аппаратных средств и вычислительной мощностью, имеющейся в устройстве. Каждое показание датчика вводится в запоминающее устройство в блоке 642. Затем алгоритм переходит к блоку 650 принятия решения для определения, введено ли в запоминающее устройство второе заранее определенное число k показаний каждого датчика. Если второе заранее определенное число k показаний датчиков еще не достигнуто, алгоритм возвращается на блок 640 и собирает дополнительное количество показаний. После достижения второго заранее определенного числа k алгоритм переходит к блоку 660, где показания каждого датчика усредняются по k ранее введенным в запоминающее устройство величинам. Как и в случае усреднения множества величин частотной погрешности, количество усредняемых показаний датчика может выбираться конструктором. Усредненные показания датчика вводятся в запоминающее устройство на блоке 662. Процесс характеризации (Г) в этой точке завершается, и алгоритм может либо завершиться, либо продолжать процесс характеризации, возвращаясь в точку 630, как показано на фиг.6В.
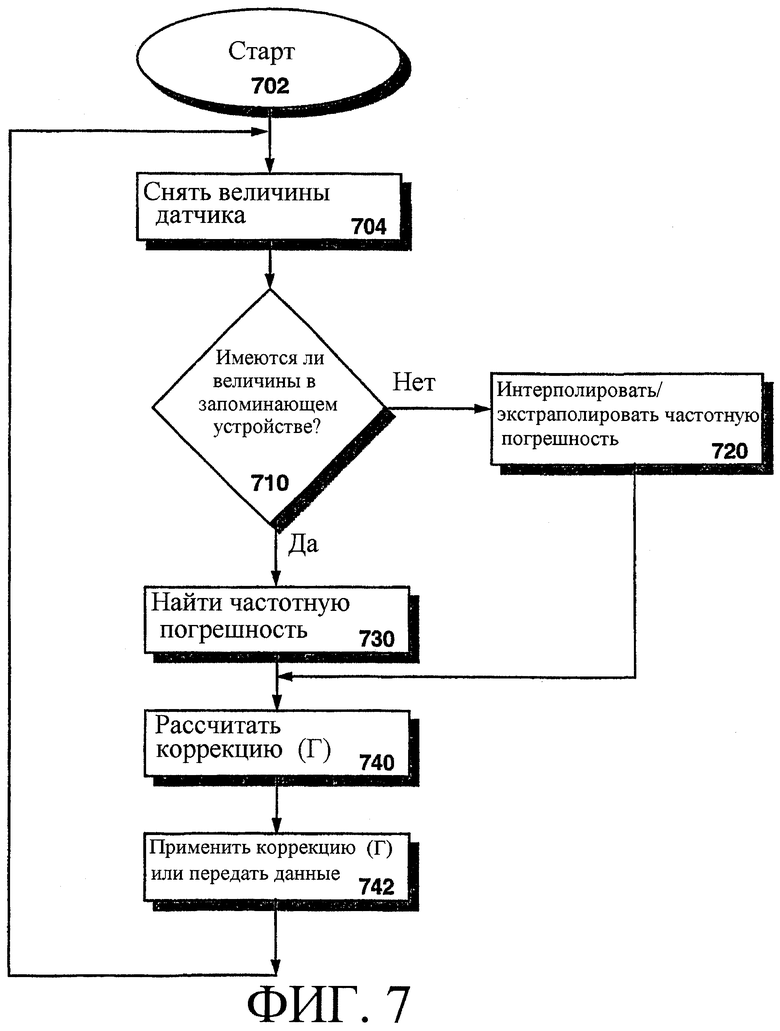
На фиг.7 показана блок-схема алгоритма компенсации (Г), которая работает один раз при, по меньшей мере, одном цикле алгоритма характеризации. Алгоритм начинается в блоке 702. Старт может представлять включение режима ГСОМА в беспроводном телефоне, в котором реализованы и телефонный приемопередатчик, и приемник системы ГСОМА. Альтернативно, старт может представлять конец одного цикла алгоритма характеризации (Г), где компенсация (Г) происходит непрерывно, как и процесс характеризации (Г).
Алгоритм затем переходит к блоку 704, где считываются показания датчиков. Эти показания представляют последние по времени показания датчиков. Алгоритм переходит к блоку 704, где показания датчиков сравниваются с ранее сохраненными показаниями. Если показания датчиков совпадают с ранее сохраненными величинами, имеющимися в массиве характеризации, то алгоритм переходит к блоку 730, где в массиве ищется величина частотной погрешности, соответствующая сохраненным показаниям датчиков. Однако если величины показаний датчиков в массиве характеризации (Г) еще не представлены, алгоритм переходит к блоку 720, где рассчитывается частотная погрешность методом интерполяции или экстраполяции сохраненных показаний датчиков для совпадения с последними по времени показаниями датчиков и, тем самым, генерирования оценочной величины частотной погрешности (Г). Из любого из блоков 720 или 730 алгоритм переходит к блоку 740, где рассчитывается нужная коррекция (Г) на базе оценочной величины частотной погрешности (Г). Коррекция (Г) рассчитывается путем определения частотной погрешности в массиве характеризации (Г) и расчета управляющего сигнала для (Г) на основе знания функции преобразования, устанавливающей отношение сигнала в управляющей линии (Г) к выходной частоте. Когда управляющая линия (Г) является линией генератора, управляемого напряжением ГУН, функция преобразования определяется коэффициентом усиления ГУН. После определения коррекции (Г) алгоритм переходит на блок 742. На блоке 742 алгоритм применяет к (Г) рассчитанную коррекцию. Альтернативно или дополнительно к применению коррекции (Г) алгоритм может передать данные в приемник системы ГСОМА. Эти данные могут состоять из установленной частотной погрешности (Г) и любой коррекции, введенной в (Г). Используя эту информацию и компенсированный (Г), приемник системы ГСОМА может быстрее и более эффективно принимать сигналы.
Вышеприведенное описание предпочтительных вариантов осуществления позволяет любому специалисту в данной области использовать настоящее изобретение. Специалистам будут очевидны различные изменения, которые могут быть внесены в описанные варианты осуществления, и описанные общие принципы могут быть применены к другим вариантам без применения изобретательских способностей. Таким образом, настоящее изобретение не ограничивается описанными выше вариантами осуществления, но должно определяться в самом широком смысле, соответствующем описанным выше принципам и отличительным признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ЧАСТОТЫ ГЕТЕРОДИНА ПОСРЕДСТВОМ КОНТРОЛЯ ВНЕШНИХ УСЛОВИЙ | 2001 |
|
RU2333598C2 |
| УПРАВЛЕНИЕ ГЕНЕРАТОРОМ ОПОРНОЙ ЧАСТОТЫ ДЛЯ БЕСПРОВОДНЫХ УСТРОЙСТВ, ИМЕЮЩИХ ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ | 2009 |
|
RU2487471C2 |
| БЫСТРОЕ ОБНАРУЖЕНИЕ И СИНХРОНИЗАЦИЯ СИГНАЛА ДЛЯ ПЕРЕДАЧ ДОСТУПА | 1998 |
|
RU2236088C2 |
| АППАРАТУРА ПЕРЕДАЧИ НАВИГАЦИОННЫХ СИГНАЛОВ, СПОСОБ ПЕРЕДАЧИ НАВИГАЦИОННЫХ СИГНАЛОВ И АППАРАТУРА ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ МЕСТОПОЛОЖЕНИЯ | 2011 |
|
RU2561721C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О МЕСТОНАХОЖДЕНИИ | 2002 |
|
RU2287180C2 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| ДЕМОДУЛЯТОР НИЗКОЙ МОЩНОСТИ С МИНИМАЛЬНЫМ КОЛИЧЕСТВОМ ОТВОДОВ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2008 |
|
RU2448413C2 |
| СИСТЕМА ДЛЯ МОДУЛИРОВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ В ЯЧЕИСТОЙ ТЕЛЕФОННОЙ СИСТЕМЕ С КОДОВЫМ РАЗДЕЛЕНИЕМ МНОЖЕСТВЕННОГО ДОСТУПА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2125344C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| КАНАЛ ДОСТУПА С ОГРАНИЧЕННЫМИ ВРЕМЕНАМИ ПРИХОДА | 2005 |
|
RU2343648C2 |
Изобретение относится к электронным цепям приемников, используемых в Глобальной Системе Определения Местоположения Абонента. Достигаемым техническим результатом является уменьшение частотной погрешности гетеродина приемника путем введения компенсации в соответствии с рабочими условиями. Частотная погрешность гетеродина минимизируется с помощью характеризации гетеродина. Опорный сигнал от внешнего источника, содержащий минимальную частотную погрешность, подается на электронное устройство. Внешний сигнал используется как опорная частота для оценки частотной погрешности внутреннего источника частоты. Электронное устройство отслеживает параметры, которые влияют на точность частоты внутреннего источника. Одним из параметров, влияющих на частоту внутреннего источника, является температура. Электронное устройство собирает и запоминает величины таких параметров, а также величины соответствующей им частотной погрешности внутреннего источника частоты. Полученная характеристика внутреннего источника частоты используется для его компенсации, когда на него не поступает внешний опорный сигнал. 2 н. и 15 з.п. ф-лы, 7 ил.
| Фронтальный дождеватель | 1973 |
|
SU483090A1 |
| WO 9714049 А2, 17.04.1997 | |||
| ПРИЕМНИК ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ И ИЗМЕРИТЕЛЬ УРОВНЯ ДЛЯ НЕГО | 1996 |
|
RU2097922C1 |
| ДЕМОДУЛЯТОР ШИРОКОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2128399C1 |

