Изобретение относится к области ракетной техники, а именно к складным аэродинамическим поверхностям (крыльям, рулям, стабилизаторам) и механизмам их раскрытия, и может быть использовано в конструкции механизмов раскрытия складываемых, находящихся под обтекателем крыльев двухступенчатых ракет.
Ракеты с раскрывающимися аэродинамическими поверхностями (крыльями, рулями, стабилизаторами) широко и давно известны (патент США №3650496, 1972 г.; патенты РФ №2243488, F42B 10/14, 2004 г.; №2284450, F42B 10/14, 2006 г. и др.). Это ракеты, стартующие либо из транспортно-пусковых контейнеров, либо со стартово-разгонных ступеней и находящихся при разгоне под обтекателем. Наличие складываемых конструкций продиктовано уменьшением габаритов средств доставки ракет.
Наиболее близким по набору существенных признаков является техническое решение по патенту РФ №2365866, F42B 10/14, 2008 г., которое и было принято авторами за ближайший аналог.
Данное техническое решение представляет собой складной руль, шарнирно закрепленный на корпусе ракеты и жестко фиксируемый после раскрытия. Руль переводится из сложенного положения в раскрытое с помощью механизма раскрытия руля, расположенного внутри вала привода управления рулем и представляющего в данном конкретном случае пружинный толкатель. В качестве механизма раскрытия можно было бы использовать (особенно в случае больших шарнирных моментов при раскрытии) устройства с другим принципом действия, например, пиротолкатели, пневмо- и гидромеханизмы.
Указанное устройство представляет собой компактное устройство с малыми габаритными размерами и может быть признано рациональным для одноступенчатых ракет с аэродинамическими поверхностями (рулями) малой площади.
Однако для вытянутых вдоль корпуса аэродинамических поверхностей (несущих крыльев) сверхзвуковых и гиперзвуковых ракет, включающих в себя для достижения заданной скорости полета разгонные (отделяемые) ступени, данное техническое решение использовать нецелесообразно, так как такие крылья, как правило, устанавливаются не менее чем на двух значительно разнесенных по длине корпуса шарнирных опорах, а для их раскрытия (из-за большой скорости полета и значительной площади крыльев) требуются значительные усилия для преодоления больших шарнирных моментов при раскрытии. Это приводит к значительному увеличению массы (паразитной после раскрытия крыльев) размещенных на маршевой ступени механизмов раскрытия и систем, обеспечивающих их функционирование, и к уменьшению полезного объема внутри самой ракеты для размещения других систем ракеты.
Указанные недостатки устраняются тем, что механизм раскрытия крыла конструктивно отделен от шарнирно установленного на корпусе маршевой ступени ракеты крыла, размещен на разгонной (отделяемой) ступени ракеты и взаимодействует с крылом посредством двух пальцев механизма, утопленных в гнездах, размещенных в задней кромке крыла. Наличие двух пальцев позволяет приложить момент на поворот крыла непосредственно к кромке крыла (в двух точках) и гарантированно повернуть крыло, в том числе и составное - с вращающимся элероном (элевоном) в задней части крыла. Выполнить такую операцию с составным крылом одним пальцем (контакт с кромкой в одной точке в виде сосредоточенной в точке силы) достаточно проблематично - крыло вместо того, чтобы раскрываться, может просто сложиться по линии вращения элерона (элевона) и в конце концов сломаться.
В то же время для того, чтобы предложенная конструкция была работоспособной, и крыло гарантированно раскрылось, необходимо очень строгое совмещение осей вращения крыла и раскрывающего крыло вращающегося рычага механизма раскрытия как по направлению (оси вращения должны иметь одинаковую пространственную ориентацию), так и по геометрическому расположению (в плоскостях, перпендикулярных направлению осей, оси должны находиться в одной точке). Если это условие не будет соблюдено, то из-за расхождения траекторий движения пальцев механизма раскрытия и соответствующих им гнезд в кромке крыла возникают значительные монтажные напряжения, которые могут вообще остановить процесс раскрытия (крыло может «зависнуть» в промежуточном положении) и в конечном итоге привести к выходу из строя либо крыла, либо механизма раскрытия крыла.
Добиться указанного выше идеального совмещения осей вращения крыла и вращающегося рычага механизма раскрытия крыла чисто технологическими средствами не представляется возможным ввиду повышенной сложности конструкции ракеты. При небольших расхождениях можно было бы предоставить основанию рычага в плоскости, перпендикулярной направлению осей вращения, небольшую двухстепенную свободу (передавать на рычаг от привода только вращающий момент, жестко не фиксируя при этом сам рычаг относительно оси вращения). Но это все приводит к снижению жесткостных характеристик конструкции, что нежелательно при повышенном уровне вибраций.
Данная задача (обеспечение гарантированного раскрытия при условии несовмещения осей вращения крыла и вращающегося рычага механизма раскрытия крыла) в предлагаемой конструкции решена следующим образом.
Если взять два протяженных рычага с заведомо разными осями вращения, то при любом положении одного из рычагов, второй рычаг всегда можно установить параллельно первому. Поэтому, вращая один рычаг, можно, не встречая никакого сопротивления, повернуть второй рычаг, единственно, что при этом будет изменяться расстояние между рычагами, характер изменения которого зависит от взаимного расположения осей вращения рычагов. Таким образом, компенсация несовпадения осей вращения рычагов сводится к обеспечению изменяемого расстояния между параллельными рычагами. В предлагаемой конструкции роль подобного компенсатора выполняют два параллельных шарнирно соединенных между собой и образующих параллелограмм рычага. Один из рычагов снабжен пальцами, взаимодействующими с гнездами в задней кромке крыла, без возможности перемещения относительно крыла, второй установлен на вращающемся посредством привода стержне механизма раскрытия, при этом (с целью обеспечения переменного расстояния между рычагами) второй рычаг установлен с возможностью перемещения вдоль оси стержня без возможности проворота относительно последнего - это обеспечивает прилегание первого рычага к кромке крыла.
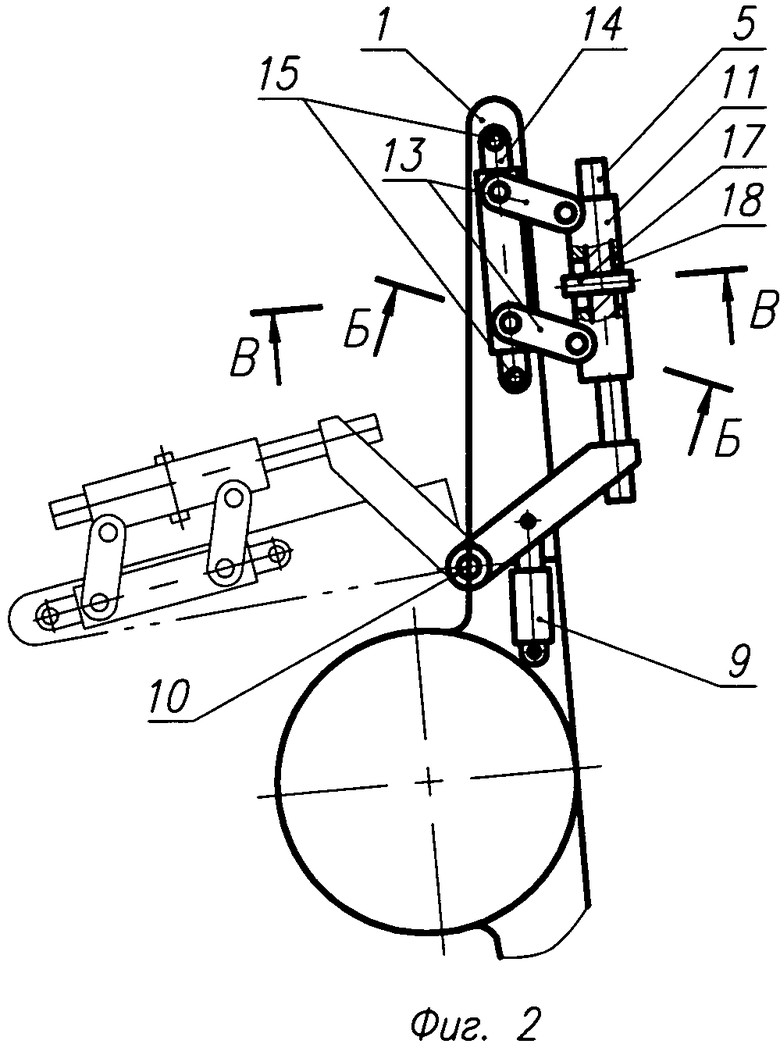
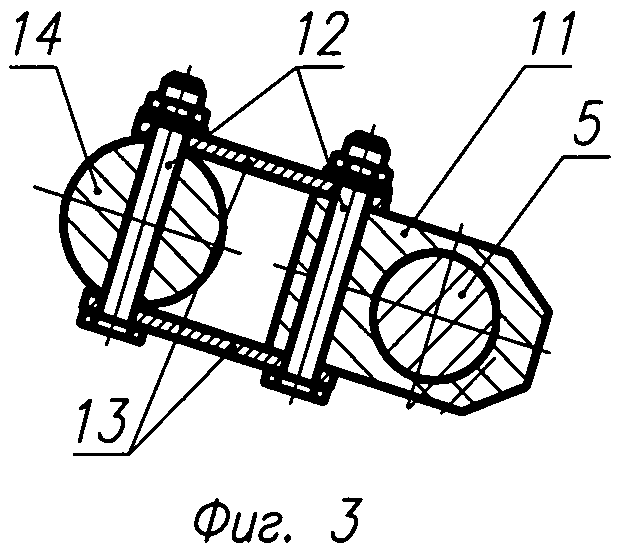
Предложенное техническое решение поясняется чертежами - на фиг.1-4 представлены общий вид крыла с механизмом раскрытия (вид сбоку), вид против направления полета и сечения по отдельным элементам конструкции механизма раскрытия крыла.
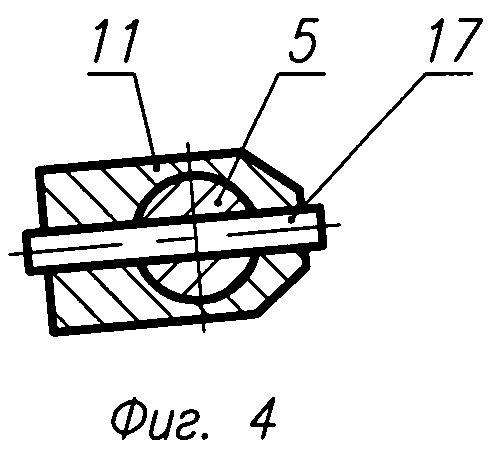
Предлагаемое устройство состоит из фиксируемого в раскрытом положении (узлы фиксации условно не показаны) крыла 1, шарнирно установленного на двух опорах 2 на корпусе маршевой ступени 3 ракеты, механизма раскрытия крыла, выполненного в виде прилегающего к задней кромке 4 крыла 1 вращающегося стержня 5, ось вращения 6 которого размещена в опорном кронштейне 7, жестко закрепленного на разгонной (отделяемой) ступени 8 ракеты, и привода 9. При этом опорный кронштейн 7 установлен так, что оси шарнирных опор 2 крыла 1 и ось вращения 6 стержня 5 являются составными частями единой оси 10 (оси вращения опор 2 и стержня 5 совмещены по направлению), а на самом стержне 5 с минимальными зазорами размещен с возможностью перемещения вдоль его продольной оси рычаг 11, который шарнирно на осях 12 посредством двух пар тяг 13 соединен с параллельным ему рычагом 14. На рычаге 14 жестко установлены разнесенные по его длине два пальца 15, которые в свою очередь заведены (утоплены) в гнезда 16, жестко закрепленные на задней кромке 4 крыла. На стержне 5 установлен штифт 17, препятствующий провороту рычага 11 относительно стержня и обеспечивающий тем самым постоянное в процессе раскрытия прилегание рычага 14 к кромке 4 крыла 1, а на рычаге 11, в свою очередь, под штифт 17 для обеспечения возможности перемещения рычага относительно стержня выполнены продольные сквозные пазы 18. В общем случае крыло 1 может быть выполнено составным и включать в себя помимо основной части 1 еще и вращающуюся по оси 19, образуемой шарнирами 20, аэродинамическую поверхность управления (элевон, элерон) 21, которая в сложенном положении крыла может слегка покачиваться на своей оси вращения 19 (из-за наличия люфтов в шарнирах).
Устройство работает следующим образом:
При подаче управляющегося сигнала привод 9 поворачивает стержень 5, а вместе с ним посредством параллельных рычагов 11 и 14 и крыло 1 с помощью установленных на рычаге 14 двух пальцев 15, взаимодействующих с гнездами 16 в задней кромке 4 крыла, из сложенного положения в раскрытое до фиксации крыла на своих фиксаторах. Наличие исходного несовпадения осей вращения крыла и вращающегося стержня механизма раскрытия крыла, как указывалось выше, компенсируется при раскрытии изменением расстояния между рычагами 11 и 14, а установка рычага 11 на стержне 5 с минимальными зазорами на достаточно протяженной базе позволяет максимально снизить влияние кинематических люфтов на жесткость конструкции. С этого момента механизм раскрытия крыла больше не нужен и при разделении ступеней ракеты отбрасывается вместе с разгонной ступенью ракеты. Наличие в зацеплении с гнездами 12 крыла одновременно двух разнесенных по длине рычага 5 пальцев 11 позволяет раскрывать и составные крылья (с вращающимся на своей оси элероном или элевоном в задней части крыла) и ограничить действующие на заднюю кромку крыла усилия при раскрытии. Следует также заметить, что при определенной конфигурации пальцев (выполнение контактирующей с гнездом поверхности пальца сферической) предложенная конструкция механизма позволяет компенсировать и небольшие расхождения в пространственной ориентации осей вращения крыла и вращающегося стержня механизма раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2478907C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2482433C1 |
| Механизм раскрытия консолей крыла летательного аппарата | 2016 |
|
RU2652035C1 |
| МЕХАНИЗМ РАСКРЫТИЯ И СТОПОРЕНИЯ КРЫЛЬЕВ РАКЕТЫ | 2017 |
|
RU2675275C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕВОНОМ | 2012 |
|
RU2505776C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕВОНОМ | 2012 |
|
RU2518486C2 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ РАКЕТЫ | 2013 |
|
RU2520846C1 |
| Способ парашютной посадки беспилотных самолетов и беспилотный самолет с системой парашютной посадки | 2023 |
|
RU2834660C1 |
| РАСКРЫВАЕМЫЙ РУЛЬ РАКЕТЫ | 2014 |
|
RU2568974C1 |
| РАСКРЫВАЕМЫЙ РУЛЬ РАКЕТЫ | 2013 |
|
RU2520812C1 |
Изобретение относится к области ракетной техники, а именно к складным аэродинамическим поверхностям и механизмам их раскрытия. Раскрываемое шарнирно закрепленное на корпусе крыло и механизм раскрытия крыла, выполненный в виде вращающегося стержня с установленными на нем с возможностью перемещения вдоль его оси с фиксацией от взаимного проворота двумя шарнирно соединенными между собой и образующими параллелограмм рычагами, размещены на разных ступенях двухступенчатой ракеты. Ось вращения стержня установлена соосно с осью вращения крыла. Крыло раскрывается за свою заднюю кромку с помощью двух пальцев, установленных на одном из рычагов механизма раскрытия. Технический результат заключается в обеспечении более легкого раскрытия крыла и снижении массы ракеты. 4 ил.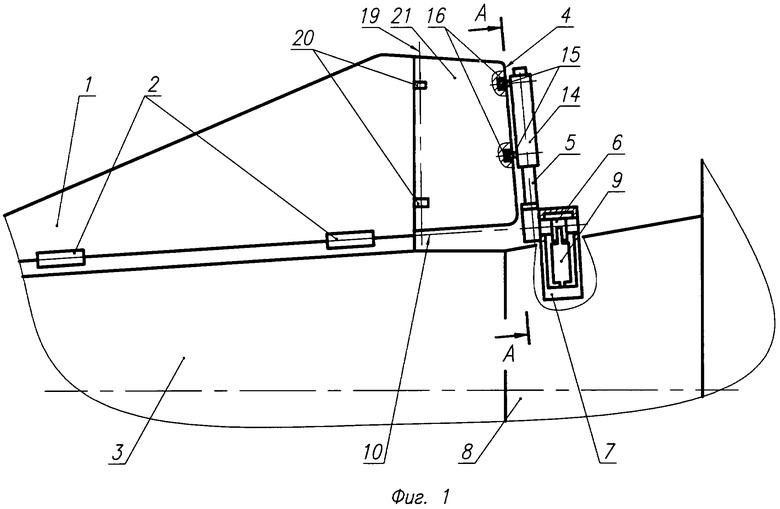
Раскрываемое крыло двухступенчатой ракеты, состоящее из фиксируемого в раскрытом положении шарнирно закрепленного на корпусе ракеты крыла и механизма раскрытия крыла с приводом, отличающееся тем, что крыло и механизм раскрытия крыла установлены автономно на разных ступенях ракеты, механизм раскрытия крыла выполнен в виде вращающегося стержня и установленных на стержне двух шарнирно соединенных между собой и образующих параллелограмм рычагов, при этом ось вращения крыла и ось вращения стержня, закрепленная в опорном кронштейне, совмещены по направлению, один из двух рычагов размещен на стержне с возможностью перемещения вдоль его оси с фиксацией от взаимного проворота, другой рычаг снабжен двумя разнесенными по его длине пальцами, взаимодействующими с гнездами, закрепленными на задней кромке крыла.
| СКЛАДНОЙ РУЛЬ УПРАВЛЯЕМОЙ РАКЕТЫ | 2008 |
|
RU2365866C1 |
| US 3125956 A, 24.03.1964 | |||
| US 3650496 A, 21.03.1972 | |||
| ЗАПИРАЮЩЕЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛИЧЕСКОЙ ДВЕРИ | 2001 |
|
RU2194838C1 |

