Изобретение относится к способам и устройствам, обеспечивающим вертикальную посадку беспилотных летательных аппаратов с помощью парашютных систем.
Известен беспилотный самолет, легкосборная конструкция которого в процессе приземления распадается на части от ударных нагрузок для предохранения от разрушений (патент США №7237750 от 2007.07.03, В64С 1/00). Конструкция узлов соединения частей БЛА предусматривает при распаде амортизацию энергии ударов приземления.
Основным недостатком такой технологии посадки беспилотного самолета является то, что при планировании вблизи, как правило, загроможденной растительностью поверхности земли невозможно обеспечить стабильность глиссады планирования и динамических параметров БЛА вследствие повышенной турбулентности приземных воздушных слоев. Поэтому невозможно предусмотреть протяженность глиссады, место приземления и, соответственно, динамику ударных нагрузок на БЛА от конкретного рельефа и растительности поверхности земли. Подобные ударные нагрузки на БЛА, как правило, имеют сосредоточенный характер, что неизбежно приводит к разрушению максимально облегченных крыльевых конструкций БЛА. Именно поэтому данная технология посадки БЛА из-за ненадежности не получила распространения и применяется динамически более стабильная парашютная посадка.
Известны технология и система парашютной посадки беспилотного летательного аппарата (патент РФ №2456211 от 2012.07.20, B64D 17/80), в соответствии с которыми поворотные консоли крыла БЛА закреплены на его центроплане посредством шарниров и замков-фиксаторов. В полетном положении консоли крыла фиксируются замками-фиксаторами, которые приводятся в движение редуктором исполнительного привода системы управления БЛА. Консоли крыла при раскрытии купола парашюта шарнирно перемещаются вместе с куполом вверх, при этом их трехстепенные шарниры обеспечивают плавное перемещение купола. Посадка БЛА с консолями, сложенными в вертикальной плоскости, должна выполнить функцию подвесной системы и помочь избежать их повреждения в сильный ветер, когда большая парусность парашюта может привести к перевороту и ударам БЛА.
Основным недостатком данного устройства является то, что БЛА даже со сложенными консолями под действием парусности парашюта может волочиться по площадке приземления с поперечным движению положением фюзеляжа с хвостовым оперением, вследствие чего могут быть повреждены все его части, включая полезную нагрузку. К тому же приземление происходит на нижнюю поверхность фюзеляжа БЛА, где расположена его полезная нагрузка, которую в такой компоновке необходимо или демпфировать при приземлении специальным дополнительным устройством, или минимизировать вертикальную скорость снижения увеличением площади купола парашюта, что неизбежно увеличит его парусность. Механика укладывания парашютной системы в крыле вдоль его размаха существенно усложняет и ослабляет конструкцию крыла такого БЛА. При этом механизм складывания консолей крыла в такой кинематике сложен и снижает надежность БЛА в полете, т.к. требует отсутствия люфтов в осях поворота, а сервоприводы должны преодолевать большие усилия. В случае отказа авионики или их электромеханики в полете неизбежна катастрофа БЛА, что усложняет его эксплуатацию.
Известны также способ парашютной посадки БЛА с устройством освобождения парашюта от БЛА при приземлении (патент США №8191831 от 2012.06.05, МПК B64D 17/00, B64D 17/54). При выпуске с БЛА и раскрытии парашюта под ним раскрывают и надувают пневмодемпфер, которым амортизируют ударные нагрузки приземления. При приземлении БЛА по команде его системы управления посредством сервопривода открывают замок удерживания соединительного узла подвесной системы БЛА, вследствие чего он отделяется от приземлившегося БЛА и складывает купол, что предотвращает негативное воздействие его парусности.
К недостаткам данной технологии парашютной посадки следует отнести ненадежность, обусловленную необходимостью разворачивания парашютной системы из отсека на нижней поверхности фюзеляжа для подвешивания под парашютом верхней поверхности самолета. Вследствие этого он приземляется на нижнюю поверхность, на которой всегда расположена дорогая видеокамера, которую необходимо защищать от ударов пневмодемпфером, что существенно усложняет и утяжеляет конструкцию, при этом снижается надежность. Причем пневмодемпфер совсем не предохраняет крыло от ударов при приземлении после раскачивания БЛА под парашютом, что вынуждает укреплять крыло и, соответственно, утяжелять. К тому же сквозные щели в задних кромках крыла под элероны могут оставаться приоткрытыми из-за отклонения элеронов полетным управлением перед началом парашютной посадки и при приземлении крыло этими раскрытыми щелями может зацепиться за стебли растительности, вследствие такого рывка могут повредиться элероны совместно с шарнирными узлами их навески, механизмы которых выполняются и настраиваются прецезионно точно в силу их высокой полетной ответственности. За эти сквозные щели тоже могут зацепиться многочисленные стропы и металлический соединительный узел подвесной системы парашюта при задержке отсоединения от БЛА в ветер, причем воздействие парусности еще не сдутого парашюта радикально усугубит разрушающее воздействие рывков на элероны и их кинематику. Все это ужесточает требования к управлению парашютной посадкой, где команда на отделение парашюта от БЛА должна быть выполнена сразу после приземления БЛА или на минимально допустимой высоте перед приземлением, что может реализовываться или при визуальном контроле оператора, который должен вовремя осуществить радиокоманду на отделение парашюта. Это приводит к существенному эксплуатационному ограничению в виде необходимости точной посадки вблизи оператора, что очень проблематично даже при умеренном ветре. Если же отделение парашюта реализовывать автоматически посредством сенсорной системой срабатывания от контакта приземления, то это усложнит конструкцию и эксплуатацию, что также снизит надежность. В целом все это снижает надежность и ограничивает эксплуатационные возможности БЛА с данной технологией парашютной посадки.
Прототипом предлагаемого изобретения является способ парашютной посадки беспилотного самолета (патент РФ №2592961 от 31.12.2014 г., B64D 17/80, B64D 1/14), в соответствии с которым при раскрытии посадочного парашюта самолет переворачивают и производят снижение верхней поверхностью вниз, приземляют его на одну из законцовок консолей крыла и амортизируют энергию удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку и отделяют консоль от самолета.
Недостатками данного технического решения являются факторы недостаточной надежности приземления в аспекте вероятности повреждения беспилотного самолета. Очень критичные для его функционирования поворотные элементы его аэродинамического управления типа элеронов, элевонов или закрылков при приземлении вполне могут ударно натолкнуться на выступающие камни, неровности поверхности земли или ее растительности, что в силу рычажного приложения ударной нагрузки приведет к повреждению поворотных элементов совместно с кинематическими механизмами их сервоприводов, а также шарниров навески поворотных элементов на крыло. Даже небольшое нарушение геометрии их кинематики, причем, как правило, незаметное на первый взгляд, приведет к серьезным негативным последствиям вплоть до крушения беспилотного самолета в последующем полете.
Кроме этого, беспилотный самолет при парашютной посадке сносит по ветру в силу существенной парусности купола парашюта, вследствие чего приземление самолета происходит с горизонтальной составляющей скорости. При этом беспилотные самолеты, как правило, с повышенным аэродинамическим качеством удлиненных крыльев склонны авторотационно раскручиваться, причем с одновременным маятниковым раскачиванием в подвеске парашюта, которое присуще системе из двух соединенных и взаимодействующих эффективных аэродинамических тел «парашют - планер». Такое взаимодействие усугубляет колебательные процессы парашютных систем (см., например, Рысев О.В., Вишняк А.А., Чуркин В.М., Юрцев Ю.Н. «Динамика связанных тел в задачах движения парашютных систем». – М.: Машиностроение, 1992; также В.М. Чуркин, «К анализу динамики парашютной системы со свободно подвешенным грузом» - Электронный журнал «Труды МАИ». Выпуск № 49, 2011, www.mai.ru/science/trudy/), что в конечном итоге может привести к сложению горизонтальной составляющей скорости сноса самолета по ветру с горизонтальной составляющей скорости вращения крыла и даже резонансному эффекту. При этом при вращении одна из задних кромок консолей крыла обязательно идет по касательной вперед навстречу, например, стеблям или веткам растительности на поверхности приземления, причем вследствие ее конструктивной тонкости будет велика вероятность ее повреждения. К тому же обязательными конструктивными особенностями задних кромок консолей крыла являются щели поперечных сквозных прорезей в них под поворотные элементы аэродинамического управления типа элеронов, элевонов или закрылков. И попадание при приземлении в эти щели стеблей и веток растительности может привести к повреждению этих поворотных элементов и шарниров их навески на крыло совместно с механизмами кинематики их сервоприводов, что станет очень критичным ввиду их высокой ответственности и прецизионной настройке.
Целью изобретения в части технологии является повышение надежности и эффективности парашютной посадки беспилотного самолета и его полетной эффективности.
Поставленная цель достигается тем, что в способе посадки беспилотного самолета, включающем выпуск с него и раскрытие посадочного парашюта, в процессе которого самолет переворачивают и производят его снижение верхней поверхностью вниз под подвесной системой парашюта с приземлением, по меньшей мере, на одну из законцовок консолей крыла и амортизацией энергии удара работой на разрушение элемента фиксации кинематически шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку, отделение консоли от самолета, отсоединение части строп парашюта от подвесной системы самолета или отсоединение от нее всего парашюта, в процессе посадки поворотные элементы аэродинамического управления беспилотного самолета отклоняют вверх в сторону парашюта, при этом закрывают открытые сквозные щели поперечных вырезов в задних кромках крыла под поворотные элементы.
Открытые сквозные щели поперечных вырезов в задних кромках крыла под поворотные элементы аэродинамического управления могут быть закрыты посредством пластин, шарнирно установленых на верхней и/или нижней поверхностях участков консолей крыла, примыкающих к поперечным вырезам щелей в их задних кромках, причем оси шарниров пластин могут быть поперечны осям шарниров поворотных элементов управления, при этом пластины могут быть подпружиненно сопряжены подвижным контактом соответственно с верхней и/или нижней поверхностями боковых торцов поворотных элементов и могут быть поворачиваемыми от привода поворотных элементов управления.
Шарниры пластин могут быть устанавлены наклонно к вектору обтекающего воздушного потока, при этом до раскрытия парашюта, при его раскрытии и после его раскрытия пластины могут быть использованы в качестве дополнительных элементов аэродинамического управления спойлерного типа.
При посадке беспилотного самолета типа «бесхвостка» до раскрытия парашюта с помощью поворотных элементов в виде элевонов совместно с подвижно сопряженными с ними шарнирными пластинами может осуществляться аэродинамическое управление беспилотного самолета, при этом с их помощью при парашютном снижении может быть замедлено вращение самолета в подвеске парашюта.
Может быть использован беспилотный самолет, выполненный по интегральной схеме «бесхвостка», причем замок отсоединения парашюта или части его строп от подвесной системы парашюта может быть открыт посредством электромеханического привода, который включают при приземлении самолета.
Предлагаемый способ парашютной посадки беспилотного самолета иллюстрируется следующими графическими материалами, на которых изображены:
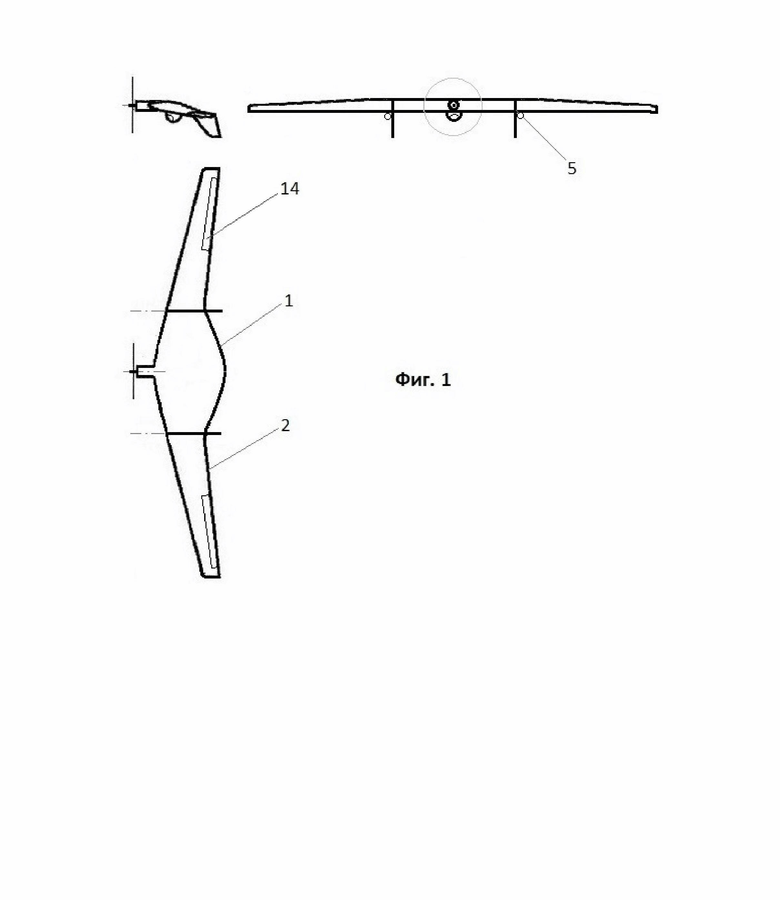
на фиг. 1 - схема варианта конструкции беспилотного самолета в 3-х проекциях его вида;
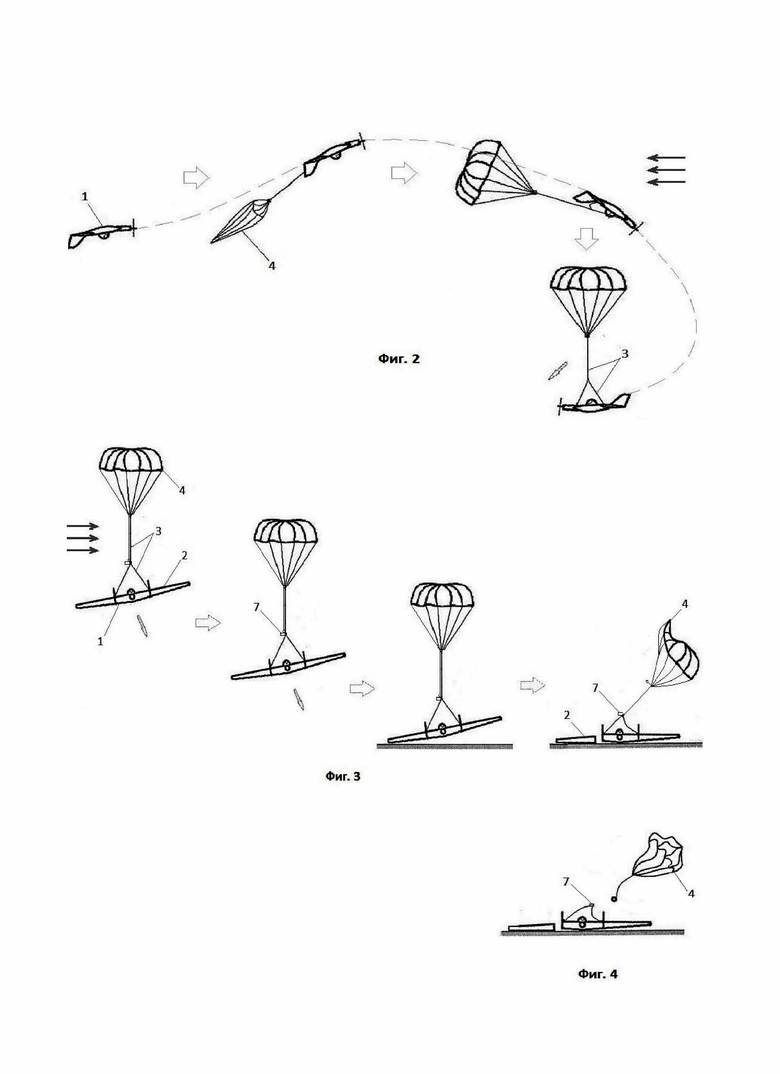
на фиг. 2 - последовательность иллюстраций динамики захода беспилотного самолета на посадку с раскрытием парашюта;
на фиг. 3 - последовательность иллюстраций динамики снижения беспилотного самолета под парашютом до приземления с гашением купола парашюта в варианте отцепки части его строп;
на фиг. 4 - иллюстрация схемы работы замка электромеханического привода гашения купола парашюта в варианте отцепки всего парашюта;
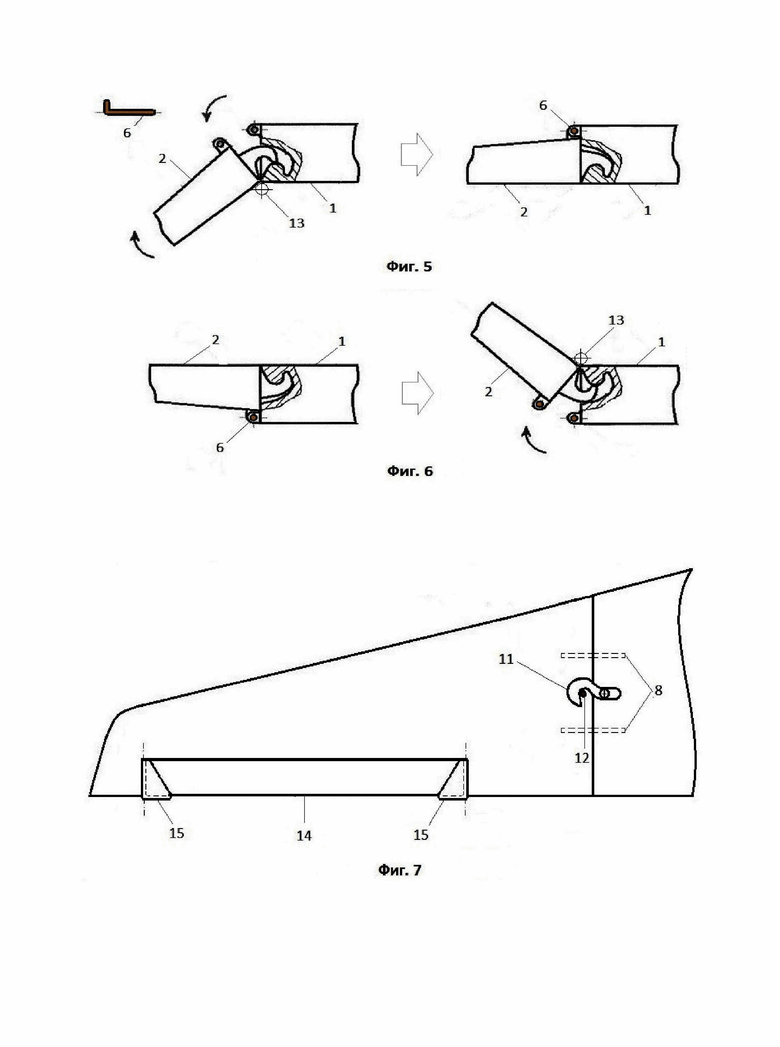
на фиг. 5 - последовательность иллюстраций варианта сборки беспилотного самолета с пристыковкой консоли крыла к его центроплану в конструктивном варианте разрушения стыковочных штырей тарированной величиной сдвига;
на фиг. 6 - последовательность иллюстраций динамики работы кинематически шарнирного складывания консоли с амортизацией ударной нагрузки при приземлении самолета с помощью разрушения специального элемента тарированной величиной сдвига;
на фиг. 7 - вид в плане схемы расположения поворотных элементов аэродинамического управления на консоли крыла беспилотного самолета и шарнирных пластин для всестороннего прикрытия сквозных щелей поперечных прорезей в задних кромках крыла в конструктивном варианте с разрушением стыковочных штырей тарированной величиной нагрузки их изгиба;
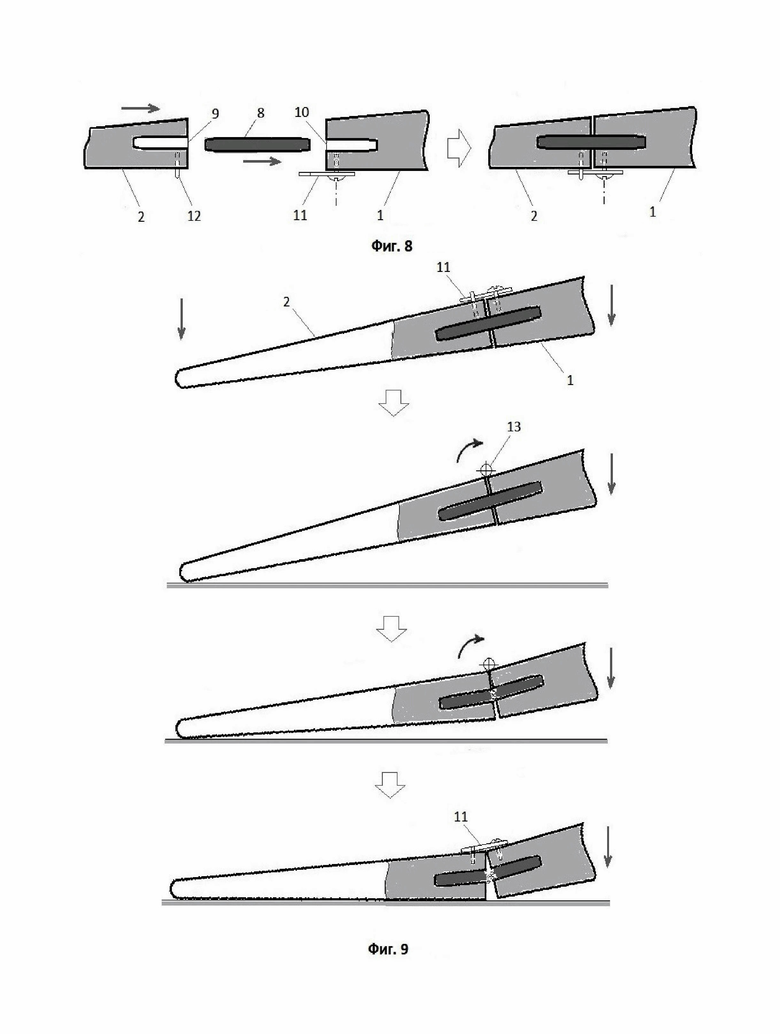
на фиг. 8 - вид в сечении схемы сборки беспилотного самолета пристыковкой консоли крыла к его центроплану с помощью стыковочных штырей с возможностью их разрушения тарированной величиной нагрузки изгиба;
на фиг. 9 - последовательность иллюстраций динамики кинематически шарнирного складывания консоли с амортизацией ударной нагрузки приземления беспилотного самолета в конструктивном варианте с разрушением стыковочных штырей тарированной величиной нагрузки изгиба;
на фиг. 10 - фотоиллюстрация отклоненного элевона управления с механизмом его сервопривода на крыле беспилотного самолета типа «бесхвостка» с открытой щелью поперечной прорези в задней кромке крыла (https://www.rbc.ru/rbcfreenews/658bc3119a7947710bcb4f78);
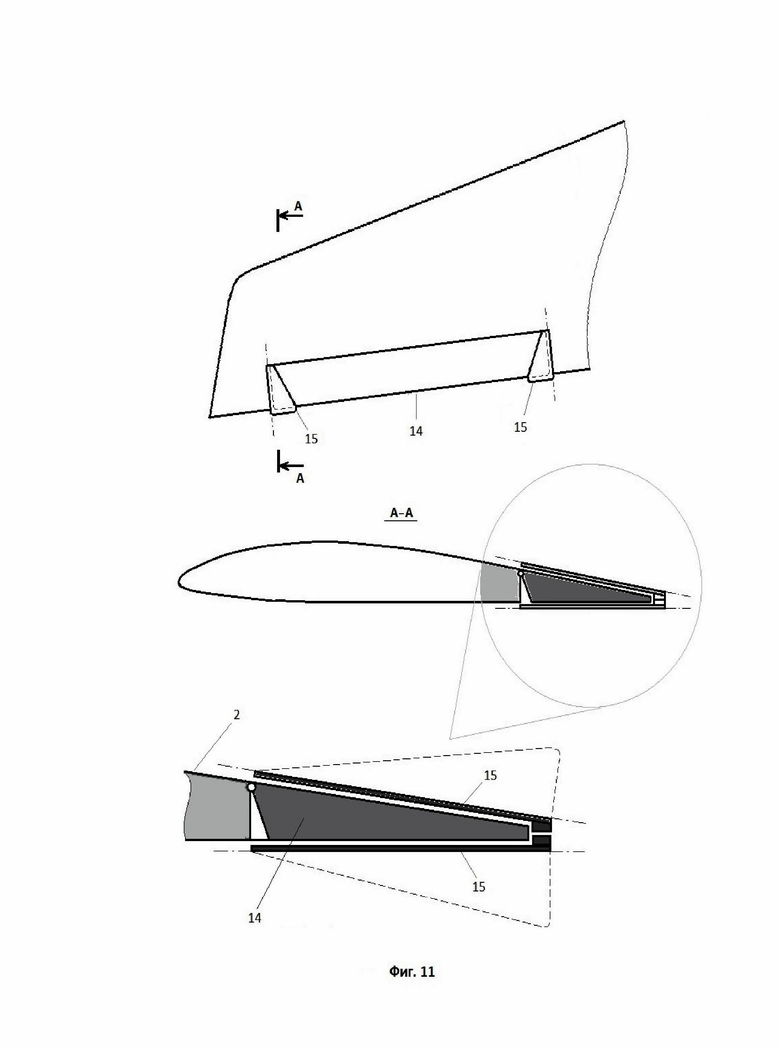
на фиг. 11 - схема поворотных элементов аэродинамического управления на консоли крыла беспилотного самолета и шарнирных пластин для всестороннего закрытия щелей поперечных прорезей в задних кромках крыла под поворотные элементы;
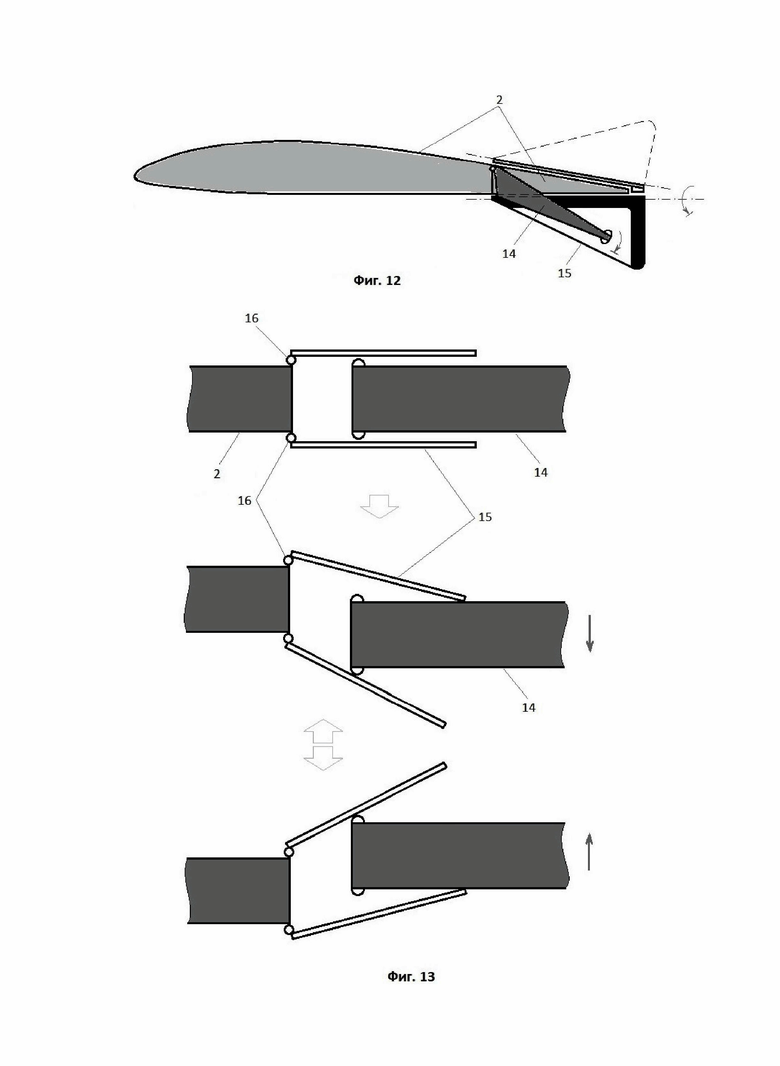
на фиг. 12 - схема иллюстрации взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин;
на фиг. 13 - последовательность иллюстраций взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин в варианте двусторонней их установки на верхнюю и нижнюю поверхности крыла при виде с торца его задней кромки;
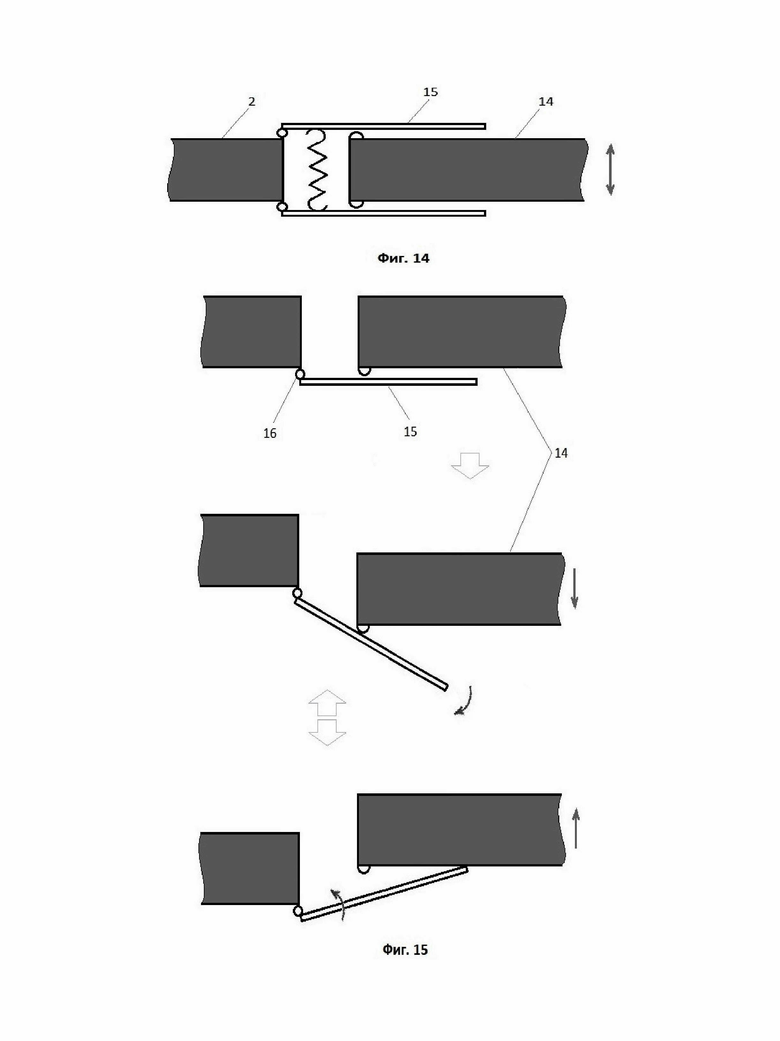
на фиг. 14 - вариант подпружинивания шарнирных пластин в варианте двусторонней их установки на верхнюю и нижнюю поверхности крыла при виде с торца его задней кромки;
на фиг. 15 - последовательность иллюстраций взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин в варианте односторонней их установки на нижнюю поверхность крыла при виде с торца его задней кромки;
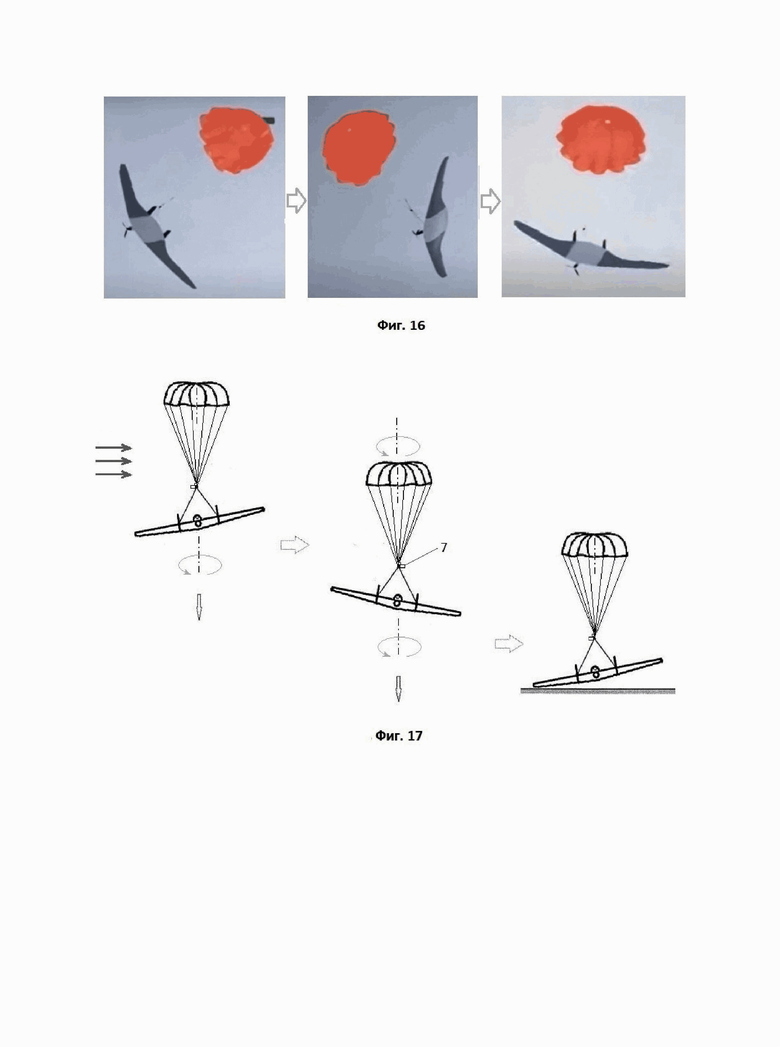
на фиг. 16 - последовательность фотоиллюстраций динамики вращения с раскачиванием беспилотного самолета интегральной схемы типа «бесхвостка» при снижении под парашютом;
на фиг. 17 - последовательность иллюстраций схемы динамики вращения с раскачиванием беспилотного самолета интегральной схемы типа «бесхвостка» при его снижении под парашютом и приземлении;
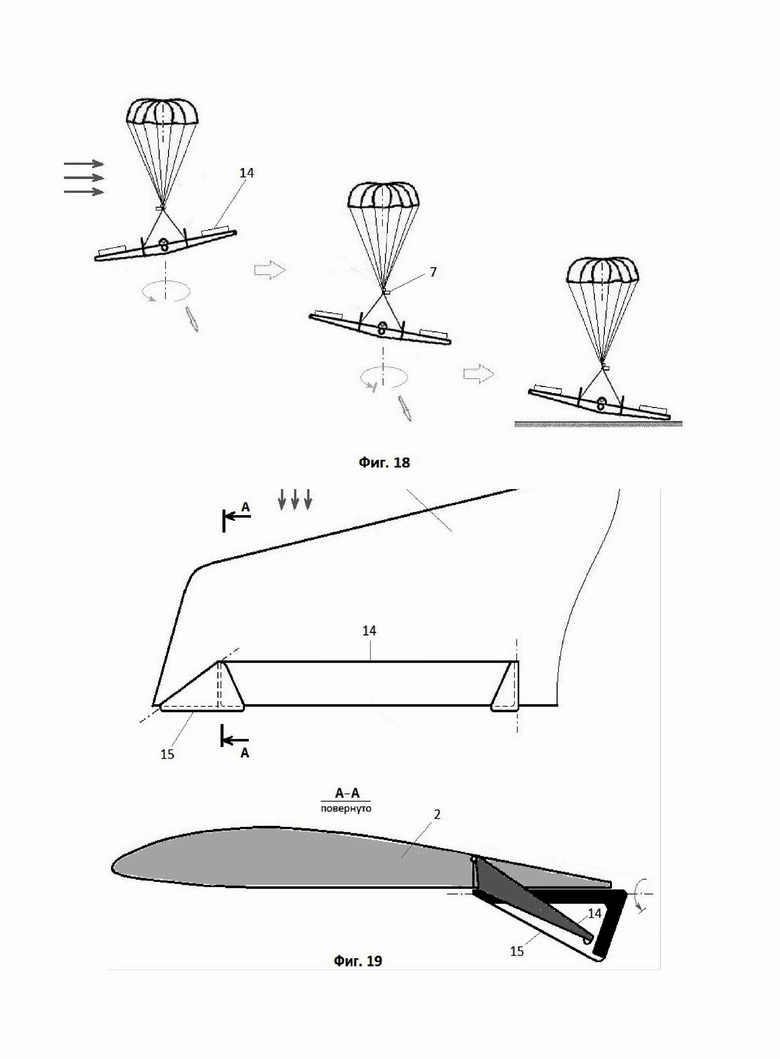
на фиг. 18 - последовательность иллюстраций схемы динамики управляемого замедления вращения беспилотного самолета интегральной схемы типа «бесхвостка» с помощью отклоненных вверх элевонов;
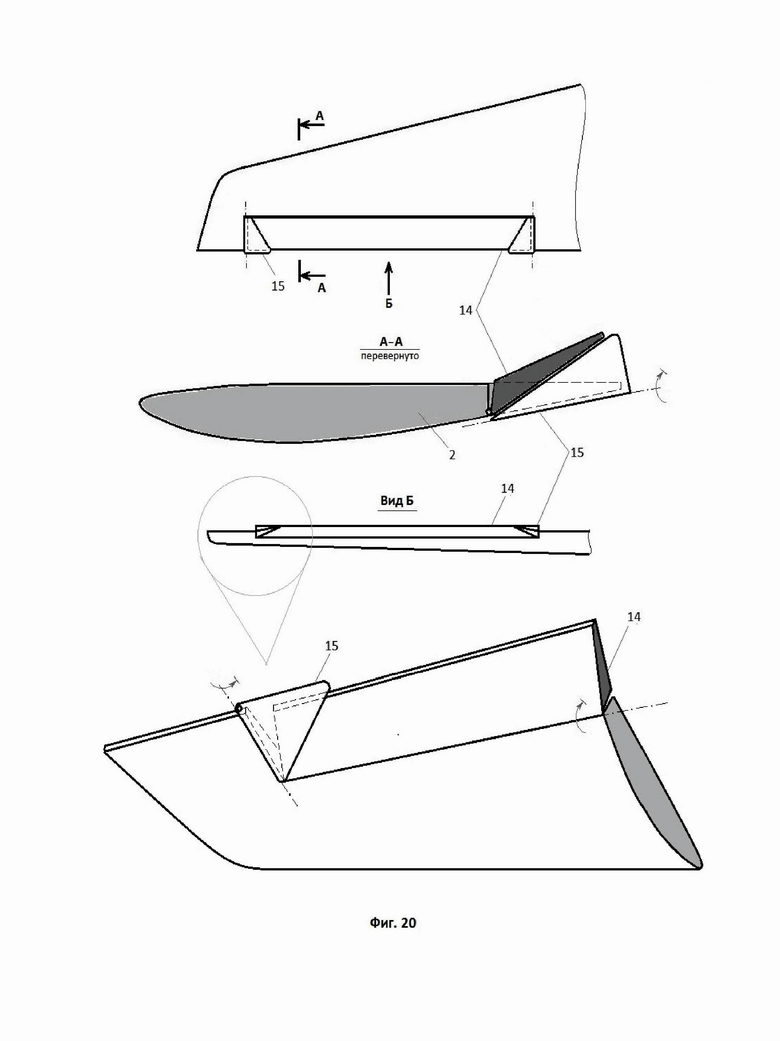
на фиг. 19 - схема поворотных элементов аэродинамического управления на консолях крыла беспилотного самолета и пластин со скошенными к воздушному потоку осями шарниров их установки на консоли крыла для дополнительного аэродинамического управления;
на фиг. 20 - схема перекрытия сквозных щелей поворотных элементов аэродинамического управления с помощью подвижно сопряженных с ними шарнирных пластин в варианте односторонней их установки на верхнюю поверхность крыла.
Предлагаемый способ парашютной посадки беспилотного самолета (фиг. 1) осуществляется следующим образом. При заходе на посадку над заданном местом по команде на посадку с летящего беспилотного самолета 1 выпускают и раскрывают парашют 4, который вытягивает соединенную с нижней поверхностью самолета его подвесную систему 3 (фиг. 2). С помощью связки парашюта 4 и подвесной системы 3 с нижней поверхностью самолета на последний воздействует пикирующий момент и он пикирует в привязном режиме и затем переходит в снижение под парашютом в перевернутом положении. Пикированию самолета, например, типа «бесхвостка» при выпуске парашюта будет содействовать и отклонение его элевонов вниз, которые после переворачивании самолета на спину в подвеске под парашютом окажутся отклоненными вверх в сторону парашюта, как показано последовательностью иллюстраций динамки снижения на фиг. 18. Щели поперечных сквозных прорезей в задних кромках крыла под поворотные элементы аэродинамического управления типа элеронов, элевонов или закрылков являются обязательными конструктивными особенностями любых беспилотных самолетов. К тому же поворотные элементы управления оборудованы прецизионными механизмами кинематики с сервоприводами (фиг. 10), и попадание при приземлении в эти щели стеблей и веток растительности может привести к критичным повреждениям или сбою прецизионной настройки этих высокоответственных элементов управления, шарниров их навески на крыло совместно с механизмами кинематики их сервоприводов. Для предотвращения таких рисков приземления открытые сквозные щели поперечных вырезов в задних кромках крыла под отклоненные вверх в сторону парашюта элевоны 14 прикрывают посредством пластин, шарнирно установленых на верхней и/или нижней поверхностях участков консолей крыла, примыкающих к поперечным вырезам щелей в их задних кромках (фиг. 10, 13, 14 и 15). При этом, так как оси шарниров этих пластин поперечны осям шарниров элевонов и пластины подпружиненно соприкасаются подвижным кулачковым контактом, соответственно, с верхней и/или нижней поверхностями боковых торцов элевонов, то пластины отклоняются как ведомые при поворачивании их приводом поворота элевонов (фиг. 11 и 12). Причем шарнирные пластины 15 прикрывают их открытые щели при всех положениях элевонов и одновременно работают в качестве аэродинамических гребней у задней кромки крыла. При этом, например, при установке осей шарниров пластин на нижней поверхности консолей крыла наклонно к вектору обтекающего самолет воздушного потока пластины могут быть использованы также в качестве дополнительных элементов аэродинамического управления спойлерного типа самолета в полете до раскрытия его парашюта, для привязного пикирования самолета при раскрытии парашюта и для снижения самолета под парашютом (фиг. 19). Например, при посадке беспилотного самолета типа «бесхвостка» до раскрытия парашюта с помощью поворотных элементов в виде элевонов 14 совместно с подвижно сопряженными с ними шарнирными пластинами 15 возможно осуществлять аэродинамическое управление самолета по каналу рысканья и т.д., при этом с их помощью при парашютном снижении возможно замедление вращения самолета в подвеске парашюта (фиг. 17). Дело в том, что в процессе снижения беспилотный самолет, например, типа «бесхвостка» с повышенным аэродинамическим качеством удлиненных крыльев имеет риск к авторотационному раскручиванию подобно лопастному ротору с одновременным маятниковым раскачиванием в подвеске парашюта, которое присуще системе из двух соединенных и взаимодействующих аэродинамических тел «парашют - самолет», как показано в динамке последовательностью иллюстраций на фиг. 16 и фиг. 17. Поэтому при снижениии беспилотного самолета типа «бесхвостка» под парашютом с помощью соответствующего управления элевонами совместно с подвижно сопряженными с ними шарнирными пластинами возможно также осуществлять аэродинамическое замедление вращения самолета в подвеске парашюта с помощью создания противовращательного момента путем варьирования сопротивлением консолей крыла, как показано в динамке последовательностью иллюстраций на фиг. 18.
Из-за раскачивания беспилотного самолета в подвеске парашюта его приземление может произойти с наклонным положением крыла, вследствие чего он приземлится на нижнюю по положению крыла его законцовку. Самолет, например, может быть специально подвешен под парашютом с наклонным положением к горизонту продольной оси крыла, вследствие чего он также приземлится на нижнюю законцовку крыла, как показано последовательностью иллюстраций динамики приземления самолета на фиг. 3. При этом законцовка консоли 2 крыла воспринимает ударную нагрузку и образует крутящий момент, который консоль подобно рычагу передает на кинематически шарнирный узел 5 ее навески на центроплан 1 самолета (фиг. 1). Консоль 2 кинематически шарнирно обратным сборке крыла образом (фиг. 5) провернется вокруг геометрической оси 13 контактного упора стыка боковых торцов консоли и центроплана (фиг. 6). При этом посадочная энергия удара амортизируется, например, работой на сдвиг одноразового элемента 6 фиксации шарнирного узла консолей, которые расфиксируют срезом этих элементов (фиг. 6), вследствие чего консоль 2 проворачивает шарнирный узел 5 и отделяется от самолета (фиг. 3 и 4).
Аналогично посадочная энергия удара может быть самортизирована, например, работой разрушения при изгибе стыковочных штырей 8 (фиг. 7, 8 и 9). Фиксирующие это состыкованное положение крюки 11 центроплана, своим зацеплением с ответными шпильками 12 на нижних поверхностях у торцов консолей и центроплана обеспечивают контактный упор их боковых торцов до приземления самолета. В момент приземления самолета на законцовку одной из консолей крыла аналогичным образом вследствие рычажной передачи ею крутящего момента на кинематически шарнирный узел ее навески произойдет изгибное разрушение стыковочных штырей и консоль 2 кинематически шарнирно провернется вокруг геометрической оси 13 контактного упора стыка боковых торцов консоли и центроплана (фиг. 9). То есть их стыковочный узел тоже будет расфиксирован, но уже тарированным по величине нагрузки изгибным разрушением штырей в качестве специально предназначенных для этого элементов, как показано в динамике вертикальной последовательностью иллюстраций на фиг. 9. Вследствие этого также произойдет кинематически шарнирное складывание консоли крыла и отстыковка ее от центроплана или самолета при выскальзывании шпильки 12 консоли из зацепления паза крюка 11.
Для приземлившегося беспилотного самолета типа «бесхвостка», например, интегральной схемы его положение на поверхности «лежа на спине» ввиду ее гладкой и округлой формы наиболее проблематично в аспекте риска негативного скольжения по загроможденной поверхности приземления под действием парусности парашюта. На заросшей растительностью поверхности это волочение самолета парусностью парашюта особо чревато риском зацепов открытым сквозными щелями, например, под элевоны с последующими их повреждениями. Поэтому и в вариантах односторонней установки шарнирных пластин 15 на нижнюю или на верхнюю поверхности крыла щели поперечных сквозных вырезов в задних кромках крыла будут постоянно прикрытыми с помощью шарнирных пластин как со стороны задних торцов кромок крыла, так и со стороны соответствующей приземлению поверхности крыла (фиг. 15, 19 и 20).
К тому же для предохранения такого беспилотного самолета замок 7 отсоединения части строп парашюта или всего парашюта от подвесной системы открывают посредством электромеханического привода, который включают при приземлении самолета. Например, это производят радиокомандой с наземной станции управления или со специального носимого пульта управления, с помощью которой открывается механизм запирания замка 7, который отсоединяет кольцо от замка и соединенные с ним стропы парашюта 4, вследствие чего его купол гасится вместе с риском парусности (фиг. 3 и 4). Причем это включение замка производят, например, в момент приземления самолета, или на очень небольшой высоте самолета от поверхности (от 0,5 м до 1 м), когда самолет уже не успеет увеличить вертикальную скорость снижения и ударную нагрузку приземления от нее.
Известен беспилотный самолет с парашютной системой посадки (патент РФ №2592961 от 31.12.2014 г., B64D 17/80, B64D 1/14), содержащий парашют со стропами и подвесной системой для самолета, две консоли его крыла, стыкуемые с самолетом посредством фиксируемых шарнирных узлов с возможностью поворота относительно параллельной хорде крыла оси и шарнирного складывания консолей при их расфиксации. Шарнирные узлы стыковки консолей крыла с самолетом выполнены легкоразъемными при разрушении одноразовых элементов их фиксации от тарированной нагрузки после поворота консолей в сторону нижней поверхности самолета, к которой прикреплена подвесная система парашюта. На подвесной системе парашюта установлен управляемый замок отсоединения от нее части строп парашюта или всего парашюта.
Целью изобретения в части устройства является повышение надежности работы системы парашютной посадки беспилотного самолета и его полетной эффективности.
Поставленная цель достигается тем, что в беспилотном самолете с парашютной системой посадки, содержащем парашют со стропами и подвесной системой для самолета, две консоли его крыла, стыкуемые с самолетом посредством фиксируемых кинематически шарнирных легкоразъемных узлов с возможностью поворота относительно параллельной хорде крыла оси в сторону нижней поверхности самолета при разрушении одноразовых элементов их фиксации от тарированной нагрузки, шарнирно установленные в сквозных вырезах кромок задних частей консолй крыла поворотные элементы аэродинамического управления, прикрепленную к нижней поверхности самолета подвесную систему парашюта, на которой установлен замок отсоединения от нее строп парашюта или их части, на верхней и нижней поверхностях крыла, примыкающих к боковым торцам вырезов под поворотные элементы, шарнирно установлены пластины, сопряженные подвижным контактом соответственно с верхней и нижней поверхностями боковых торцов поворотных элементов, причем оси шарниров пластин поперечны осям шарниров поворотных элементов, при этом пластины подпружинены в сторону их контакта с поворотными элементами управления.
Узлы стыковки консолей крыла с центропланом могут быть выполнены в виде не менее двух штырей, проходящих в соосные направляющие отверстия консолей и центроплана с продольными размаху крыла осями, на нижней поверхности у торцов центроплана могут быть установлены поворотные фиксирующие крюки, входящие в зацепление с ответными шпильками, закрепленными на нижних поверхностях консолей у их торцов, причем ширина паза зацепления крюков превышает диаметр шпилек, при этом штыри выполнены с возможностью разрушения от тарированной по величине нагрузки изгиба.
Беспилотный самолет с парашютной системой посадки может быть выполнен по схеме «бесхвостка» и оборудован в качестве органов аэродинамического управления элевонами, шарнирно установленными в сквозных вырезах кромок задних частей консолей крыла, при этом пластины могут быть подпружинены с помощью шарниров их установки.
Пластины могут быть установлены на верхней и нижней поверхностях боковых торцов поворотных элементов, при этом верхние и нижние пластины могут быть попарно соединены пружинами растяжения.
Предлагаемый беспилотный самолет с парашютной системой посадки иллюстрируется следующими графическими материалами, на которых изображены:
на фиг. 1 - схема варианта конструкции беспилотного самолета в 3-х проекциях его вида;
на фиг. 2 - последовательность иллюстраций динамики захода беспилотного самолета на посадку с раскрытием парашюта;
на фиг. 3 - последовательность иллюстраций динамики снижения беспилотного самолета под парашютом и его приземления;
на фиг. 5 - последовательность иллюстраций варианта сборки беспилотного самолета с пристыковкой консоли крыла к его центроплану в в конструктивном варианте разрушения стыковочных штырей тарированной величиной сдвига;
на фиг. 6 - последовательность иллюстраций динамики работы кинематически шарнирного складывания консоли с амортизацией ударной нагрузки при приземлении самолета с помощью разрушения специального элемента тарированной величиной сдвига;
на фиг. 7 - вид в плане схемы расположения поворотных элементов аэродинамического управления на консоли крыла беспилотного самолета и шарнирных пластин для всестороннего прикрытия сквозных щелей поперечных прорезей в задних кромках крыла в конструктивном варианте с разрушением стыковочных штырей тарированной величиной нагрузки их изгиба;
на фиг. 8 - вид в сечении схемы сборки беспилотного самолета пристыковкой консоли крыла к его центроплану с помощью стыковочных штырей с возможностью их разрушения тарированной величиной нагрузки изгиба;
на фиг. 9 - последовательность иллюстраций динамики кинематически шарнирного складывания консоли с амортизацией ударной нагрузки приземления беспилотного самолета в конструктивном варианте с разрушением стыковочных штырей тарированной величиной нагрузки изгиба;
на фиг. 10 - фотоиллюстрация беспилотного самолета интегральной схемы типа «бесхвостка» со сквозными щелями поперечных прорезей в задних кромках крыла под элевоны управления с механизмами их сервоприводов;
на фиг. 11 - схема поворотных элементов аэродинамического управления на консоли крыла беспилотного самолета и шарнирных пластин для всестороннего закрытия щелей поперечных прорезей в задних кромках крыла под поворотные элементы;
на фиг. 12 - схема иллюстрации взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин;
на фиг. 13 - последовательность иллюстраций взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин в варианте двусторонней их установки на верхнюю и нижнюю поверхности крыла при виде с торца его задней кромки;
на фиг. 14 - вариант подпружинивания шарнирных пластин в варианте двусторонней их установки на верхнюю и нижнюю поверхности крыла при виде с торца его задней кромки;
на фиг. 15 - последовательность иллюстраций взаимодействия поворотных элементов аэродинамического управления и подвижно сопряженных с ними шарнирных пластин в варианте односторонней их установки на нижнюю поверхность крыла при виде с торца его задней кромки;
на фиг. 16 - последовательность фотоиллюстраций динамики вращения с раскачиванием беспилотного самолета интегральной схемы типа «бесхвостка» при снижении под парашютом;
на фиг. 17 - последовательность иллюстраций схемы динамики вращения с раскачиванием беспилотного самолета интегральной схемы типа «бесхвостка» при его снижении под парашютом и приземлении;
на фиг. 18 - последовательность иллюстраций схемы динамики управляемого замедления вращения беспилотного самолета интегральной схемы типа «бесхвостка» с помощью отклоненных вверх элевонов;
на фиг. 19 - схема поворотных элементов аэродинамического управления на консолях крыла беспилотного самолета и пластин со скошенными к воздушному потоку осями шарниров их установки на консоли крыла для дополнительного аэродинамического управления;
на фиг. 20 - схема перекрытия сквозных щелей поворотных элементов аэродинамического управления с помощью подвижно сопряженных с ними шарнирных пластин в варианте односторонней их установки на верхнюю поверхность крыла.
Парашютная система посадки беспилотного самолета содержит парашют 4 со стропами и подвесной системой 3 для самолета, две консоли 2 его крыла, стыкуемые с его центропланом 1 самолета посредством фиксируемых кинематически шарнирных узлов 5 с возможностью кинематического поворота относительно оси, параллельной хорде крыла (фиг. 1). Перед взлетом производят сборку самолета навеской на его центроплан консолей 2 путем их стыковки, например, зацеплением с проворотом частей легкоразъемных кинематически шарнирных узлов 5 как показано в последовательности иллюстраций фиг. 5. Завершает навеску консолей фиксация их шарнирных узлов путем вставления одноразовых элементов 6, выполненных, например, в виде проволочных штырьков, в соосные отверстия сопрягаемых проушин центроплана и консолей крыла. Расфиксация кинематически шарнирных узлов 5 происходит при разрушении сдвигом одноразовых элементов 6 их фиксации от нагрузки момента поворота консолей в сторону нижней поверхности самолета при приземлении его в перевернутом положении, как показано в последовательности иллюстраций фиг. 6. При этом консоль 2 кинематически шарнирно провернется вокруг геометрической оси 13 контактного упора стыка боковых торцов консоли и центроплана. Таким образом в кинематически шарнирных узлах 5 ударная энергия приземления самолета амортизируется тарированной работой разрушения сдвигом одноразового элемента 6 фиксации узла навески консолей, которые расфиксируют последующим за сдвигом срезом этих элементов 6, вследствие чего консоль 2 проворачивает кинематически шарнирный узел и отделяется от самолета, как показано конечной фазой последовательности иллюстраций фиг. 3.
Подвесная система 3 под парашют 4 прикреплена к нижней поверхности самолета, на ней установлен замок 7 отсоединения от нее части строп парашюта или всех его строп при приземлении самолета, что также показано на конечной фазе последовательности иллюстраций фиг. 3. Подвесная система 3 самолета может быть также специально выполнена с наклонным к горизонту положением продольной оси крыла при подвесе на ней самолета под парашютом.
В другом варианте конструкции кинематически шарнирные узлы 5 стыковки консолей 2 крыла с его центропланом 1 выполнены в виде не менее двух штырей 8, например, прямоугольного сечения, которые вставляют при сборке самолета в соосные направляющие отверстия 9 консолей и отверстия 10 центроплана с продольными размаху крыла осями, как показано в последовательности иллюстраций сечений сборки центроплана с консолью на фиг. 8. Пристыкованное положение консолей с центропланом фиксируется с помощью поворотных крюков 11, шарнирно установленных на нижней поверхности центроплана у его торцов, которые входят в зацепление с ответными шпильками 12, закрепленными на нижних поверхностях консолей у их торцов, причем ширина паза зацепления фиксирующих крюков превышает диаметр шпилек (фиг. 7). Фиксирующие это состыкованное положение крюки 11 центроплана, своим зацеплением с ответными шпильками на нижних поверхностях у торцов консолей и центроплана обеспечивают контактный упор их боковых торцов до приземления самолета. В момент приземления перевернутого самолета на законцовку одной из консолей крыла вследствие рычажной передачи ею крутящего момента на кинематически шарнирный узел 5 ее навески произойдет изгибное разрушение стыковочных штырей 8 и консоль 2 кинематически шарнирно провернется вокруг геометрической оси 13 контактного упора стыка боковых торцов консоли и центроплана, как показано вертикальной последовательностью иллюстраций динамики их работы при приземлении в местных сечениях сборки на фиг. 9. То есть стыковочный кинематически шарнирный узел тоже будет расфиксирован, но уже тарированным разрушением штырей от изгиба в качестве специально предназначенных для этого элементов, вследствие чего также произойдет кинематически шарнирное складывание консоли 2 крыла и отстыковка ее от центроплана 1 самолета при выскальзывании шпильки 12 консоли из зацепления паза крюка 11.
На верхней и/или нижней поверхностях консолей 2 крыла, примыкающих к боковым торцам сквозных вырезов под поворотные элементы 14 аэродинамического управления, в виде элеронов, элевонов, или закрылков, шарнирно установлены пластины 15, сопряженные подвижным контактом соответственно с верхней и/или нижней поверхностями поворотных элементов 14 (фиг. 6, 10, 11 и 12). Причем оси шарниров пластин 15 поперечны осям шарниров поворотных элементов 14, при этом пластины подпружинены в сторону их контакта с поворотными элементами, например, с помощью подпружиненных шарниров 16 их установки. Или пластины 15, например, шарнирно установлены на верхней и нижней поверхностях боковых торцов поперечных сквозных вырезов под поворотные элементы 14, при этом верхние и нижние пластины попарно соединены пружинами растяжения (фиг. 14). При отклонениях поворотных элементов 14 они своими подвижными контактами сопряжения с шарнирными пластинами 15 отклоняют их аналогично кинематике действия кулачков, при этом щели сквозных поперечных вырезов в задних кромках крыла остаются постоянно закрытыми посредством шарнирных пластин 15 и со стороны задних торцов кромок крыла, и со стороны верхней и нижней его поверхностей, как показано на вертикальной последовательности иллюстраций на фиг. 13 и фиг. 15, изображающих при виде с заднего торца кромки крыла по обе стороны щели схему работы вышеописанных узлов с поворотным элементами 14 и шарнирными пластинами 15. Следует заметить, что и в вариантах односторонней установки шарнирных пластин 15 на нижнюю или на верхнюю поверхности крыла щели поперечных вырезов в задних кромках крыла также будут постоянно прикрыты с помощью шарнирных пластин как со стороны задних торцов кромок крыла, так и со стороны соответствующей приземлению поверхности крыла (фиг. 13, 14 и 15). Причем противоударное армирование пластин может быть выполнено, например, в виде закрепленных по их периметру силовыми композитнымии уголками, показанными черным цветом на фиг. 12.
Одной из основных концепций предлагаемых технологий парашютной посадки является амортизация кинетической энергии вертикально снижающегося самолета, причем с обеспечением максимальной энергоемкости при минимальном весе механизма поглощения энергии, т.к. именно работа разрушения материала способна поглощать максимально возможную величину энергии. При этом одноразовые разрушаемые элементы от тарированной величины нагрузки сдвига или изгиба в кинематически шарнирных узлах навески консолей крыла одновременно выполняют роль фиксаторов в данных легкосъемных узлах сборки крыла самолета, что в целом упрощает конструкцию и эксплуатацию самолета.
Приземление самолета на специально предназначенные для этого простые конструктивные элементы с минимальным добавлением веса надежно предохраняют от ударных нагрузок другие части самолета, особенно полезную нагрузку.
Отклонение в процессе посадки в сторону парашюта поворотных элементов аэродинамического управления беспилотного самолета с перекрытием шарнирными пластинами щелей от поперечных сквозных вырезов в задних кромках крыла обеспечат существенное снижение вероятности их повреждения от ударных вертикальных нагрузок приземления, а также и от касательных ударных зацепов щелями за стебли и ветки растительности. Исключается также негативное аналогичное воздействие на сервоприводы с кинематическими механизмами передачи управляющих усилий на поворотные элементы аэродинамического управления.
Возможности использования шарнирных пластин в качестве дополнительных элементов аэродинамического управления спойлерного типа позволят эффективно управлять беспилотным самолетом, например, по каналу рыскания, а в процессе парашютного снижения замедлять вращение самолета в подвеске парашюта, что также снизит негативное воздействие от касательных зацепов щелями за стебли и ветки растительности. К тому же шарнирные пластины повышают эффективность любых поворотных аэродинамических органов управления в силу перекрытия перетеканий и завихрений воздушного потока с увеличением прогала щелей при отклонении рулей, одновременно работая в качестве аэродинамических гребней для задней кромки крыла.
Потенциал энергоемкости предлагаемой технологии парашютной посадки позволяет без риска увеличить скорость снижения, что соответственно снизит влияние сноса ветром и повысит точность приземления беспилотных самолетов. При этом отсутствие необходимости применения для их парашютной посадки специальных пневматических демпферов позволяет существенно упростить и облегчить конструкцию самых распространенных малоразмерных беспилотных самолетов.
В перспективе это позволит автоматизировать процесс парашютной посадки и повысить эффективность применения беспилотных самолетов путем, например, их группового использования.

Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов и способам их посадки. Способ парашютной посадки беспилотного самолета включает выпуск и раскрытие посадочного парашюта, в процессе которого самолет переворачивают и производят его снижение верхней поверхностью вниз под подвесной системой парашюта. Приземление осуществляют на одну из законцовок консолей крыла с амортизацией энергии удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте. Беспилотный самолет содержит на верхней и/или нижней поверхностях консолей крыла, примыкающих к боковым торцам вырезов под поворотные элементы, шарнирно установленные пластины, сопряженные подвижным контактом соответственно с верхней и/или нижней поверхностями поворотных элементов. Оси шарниров пластин поперечны осям шарниров поворотных элементов, при этом пластины подпружинены в сторону их контакта с поворотными элементами. Обеспечивается повышение надежности и эффективности парашютной посадки беспилотного самолета и его полетной эффективности. 2 н. и 7 з.п. ф-лы, 20 ил.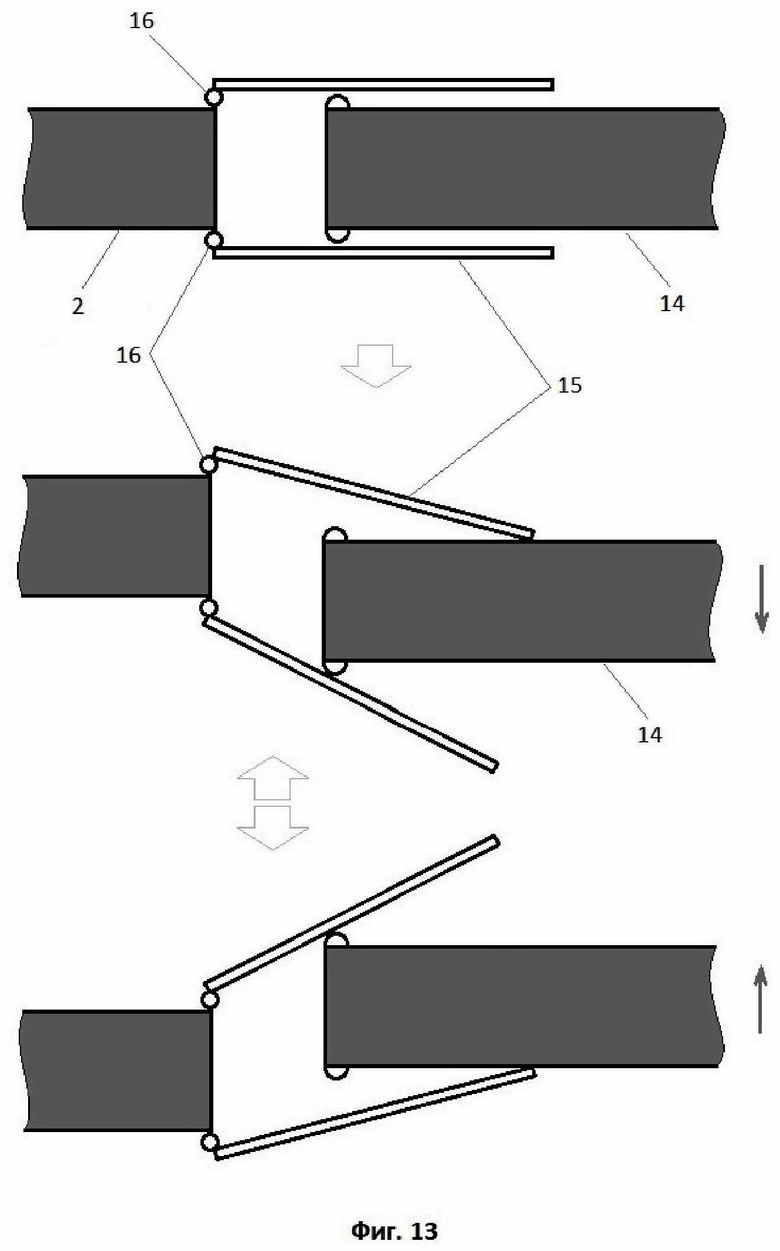
1. Способ парашютной посадки беспилотного самолета, включающий выпуск с него и раскрытие посадочного парашюта, в процессе которого самолет переворачивают и производят его снижение верхней поверхностью вниз под подвесной системой парашюта с приземлением, по меньшей мере, на одну из законцовок консолей крыла и амортизацией энергии удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку, отделение консоли от самолета, отсоединение части строп парашюта от подвесной системы самолета или отсоединение от нее всего парашюта, отличающийся тем, что в процессе посадки поворотные элементы аэродинамического управления беспилотного самолета отклоняют вверх в сторону парашюта, при этом закрывают открытые щели поперечных вырезов в задних кромках крыла под поворотные элементы.
2. Способ парашютной посадки беспилотного самолета по п.1, отличающийся тем, что открытые щели поперечных вырезов в задних кромках крыла под поворотные элементы аэродинамического управления закрывают посредством пластин, шарнирно установленных на верхней и/или нижней поверхностях участков консолей крыла, примыкающих к поперечным вырезам щелей в их задних кромках, причем оси шарниров пластин поперечны осям шарниров поворотных элементов управления, при этом пластины подпружиненно сопрягают подвижным контактом, соответственно, с верхней и/или нижней поверхностями боковых торцов поворотных элементов и поворачивают приводом поворотных элементов управления.
3. Способ парашютной посадки беспилотного самолета по п.2, отличающийся тем, что шарниры пластин устанавливают наклонно к вектору обтекающего самолет воздушного потока, при этом до раскрытия парашюта, при его раскрытии и после его раскрытия шарнирные пластины используют в качестве дополнительных элементов аэродинамического управления спойлерного типа беспилотного самолета.
4. Способ парашютной посадки беспилотного самолета по п.3, отличающийся тем, что при посадке беспилотного самолета типа «бесхвостка» до раскрытия парашюта с помощью поворотных элементов в виде элевонов совместно с подвижно сопряженными с ними шарнирными пластинами производят аэродинамическое управление беспилотного самолета, при этом с их помощью при парашютном снижении аэродинамически замедляют вращение самолета в подвеске парашюта.
5. Способ парашютной посадки беспилотного самолета по п.1, отличающийся тем, что используют беспилотный самолет, выполненный по интегральной схеме «бесхвостка», причем замок отсоединения парашюта или части его строп от подвесной системы открывают посредством электромеханического привода, который включают при приземлении самолета.
6. Беспилотный самолет с парашютной системой посадки, содержащий парашют со стропами и подвесной системой для самолета, две консоли его крыла, стыкуемые с самолетом или центропланом крыла посредством фиксируемых легкоразъемных узлов с возможностью шарнирного поворота относительно параллельной хорде крыла оси в сторону нижней поверхности самолета при разрушении одноразовых элементов их фиксации от тарированной нагрузки, шарнирно установленные в вырезах кромок задних частей консолей крыла поворотные элементы аэродинамического управления, прикрепленную к нижней поверхности самолета подвесную систему парашюта, на которой установлен замок отсоединения от нее части строп парашюта или всего парашюта, отличающийся тем, что на верхней и/или нижней поверхностях консолей крыла, примыкающих к боковым торцам вырезов под поворотные элементы, шарнирно установлены пластины, сопряженные подвижным контактом соответственно с верхней и/или нижней поверхностями поворотных элементов, причем оси шарниров пластин поперечны осям шарниров поворотных элементов, при этом пластины подпружинены в сторону их контакта с поворотными элементами.
7. Беспилотный самолет с парашютной системой посадки по п.6, отличающийся тем, что узлы стыковки консолей крыла с центропланом выполнены в виде не менее двух штырей, проходящих в соосные направляющие отверстия консолей и центроплана с продольными размаху крыла осями, на нижней поверхности у торцов центроплана установлены поворотные фиксирующие крюки, входящие в зацепление с ответными шпильками, закрепленными на нижних поверхностях консолей у их торцов, причем ширина паза зацепления крюков превышает диаметр шпилек, при этом штыри выполнены с возможностью разрушения от тарированной нагрузки изгиба в месте стыковки торцов консолей крыла с торцами его центроплана или самолета.
8. Беспилотный самолет с парашютной системой посадки по п.6, отличающийся тем, что он выполнен по схеме «бесхвостка» и оборудован в качестве органов аэродинамического управления элевонами, шарнирно установленными в вырезах кромок задних частей консолей крыла, при этом пластины подпружинены с помощью шарниров их установки.
9. Беспилотный самолет с парашютной системой посадки по п.6 или 8, отличающийся тем, что пластины шарнирно установлены на верхней и нижней поверхностях боковых торцов поперечных вырезов под поворотные элементы, при этом верхние и нижние пластины попарно соединены пружинами растяжения.
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА И ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА | 2014 |
|
RU2592961C2 |
| RU 2748623 C1, 28.05.2021 | |||
| US 8191831 B2, 05.06.2012 | |||
| WO 2007066895 A1, 14.06.2007 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2010 |
|
RU2456211C1 |

