Изобретение относится к области ракетной техники, а именно к устройствам управления складываемого крыла гиперзвукового летательного аппарата ЛА и может быть использовано в конструкции механизмов управления раскрываемых крыльев.
Наличие складываемых конструкций продиктовано необходимостью уменьшения габаритов ЛА.
Наиболее близким по набору существенных признаков является техническое решение по патенту РФ №2258895 С1, 2005 г., которое и было принято авторами за аналог.
Данное техническое решение представляет собой блок рулевого привода управления снаряда, содержащий вал вращения, соединенный с рулем, рычаг, закрепленный на валу, и рулевую машинку, установленную в корпусе снаряда, шток которой шарнирно соединен с рычагом.
Такая традиционная схема не может быть применена для управления элевоном, закрепленной на задней кромке складываемого крыла гиперзвуковой ракеты, из-за возможной значительной несоосности между осью вала вращения и осью поворота элевона, возникающей как вследствие технологии изготовления составных частей ракеты (корпус, крыло, элевон) и сборки, так и вследствие температурных деформаций, корпуса ракеты и крыла, возникающих во время полета ракеты. Температурные деформации возникают из-за неравномерного нагрева (до 1500°С), а также свойств различных материалов, применяемых в конструкции.
Целью предлагаемого изобретения является обеспечение управления элевоном расположенного на складываемом крыле, независимо от температурных деформаций составных частей ракеты и от технологических погрешностей, возникающих при изготовлении деталей и узлов ракеты, а также при сборке ракеты.
Указанная цель достигается тем, что механизм управления элевоном содержит рулевую машинку, шарнирно закрепленную с рычагом. Рычаг жестко закреплен на валу. С одной стороны вал со сферической опорой, установленной в корпусе ракеты, составляет подвижное шлицевое соединение. С другой стороны вал шарнирно соединен с обоймой. Обойма шарнирно соединена с поводком, при этом ось шарнирного соединения поводка и обоймы совмещена с осью вращения крыла, а ось шарнирного соединения обоймы с валом расположена под 90° к оси шарнирного соединения поводка. На обойме выполнен паз, а на поводке имеется зуб. После вывода ракеты на заданную траекторию раскрывается крыло и фиксируется в этом положении на корпусе ракеты, при этом в конце раскрытия крыла зуб поводка, продвигаясь, входит в паз, выполненный на обойме. После раскрытия крыла при перемещении штока рулевой машинки рычаг, вал со сферической опорой и поводок, вращаясь совместно, поворачивают элевон. При этом температурные деформации составных частей ракеты и технологических погрешностей, а также несовмещение оси вращения поводка механизма, жестко закрепленного на элевоне, с осью вращения крыла компенсируется перемещениями вала относительно сферической опоры, угловыми перемещениями сферической опоры относительно корпуса и угловыми перемещениями обоймы относительно вала.
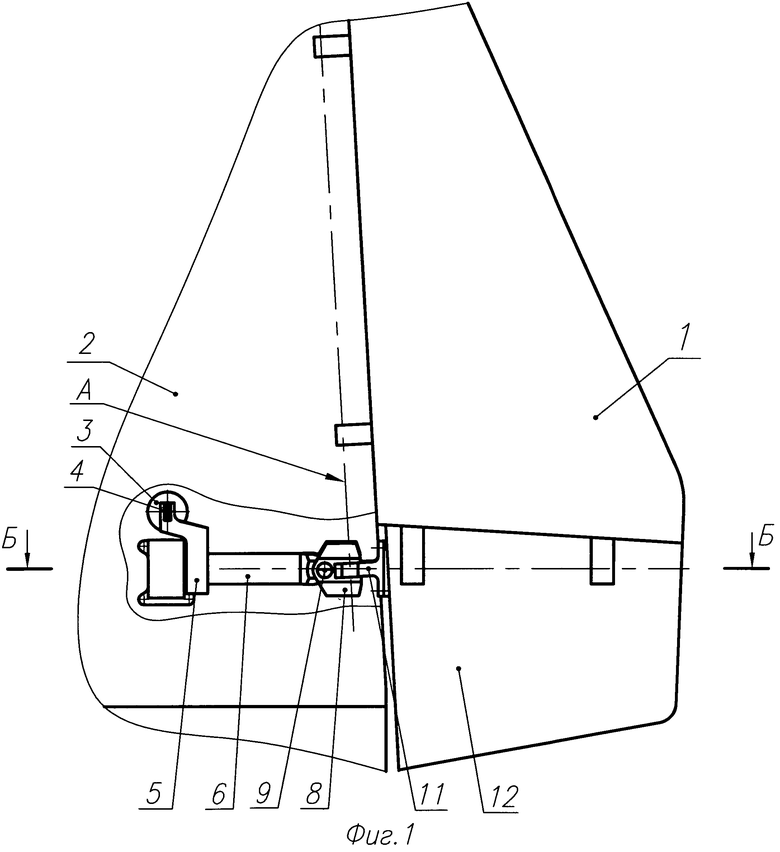
Предложенное техническое решение поясняется чертежами, где на фиг. 1-4 представлены общий вид крыла с механизмом управления, вид по направлению полета, вид против направления полета и сечения по отдельным элементам конструкции механизма управления элевоном.
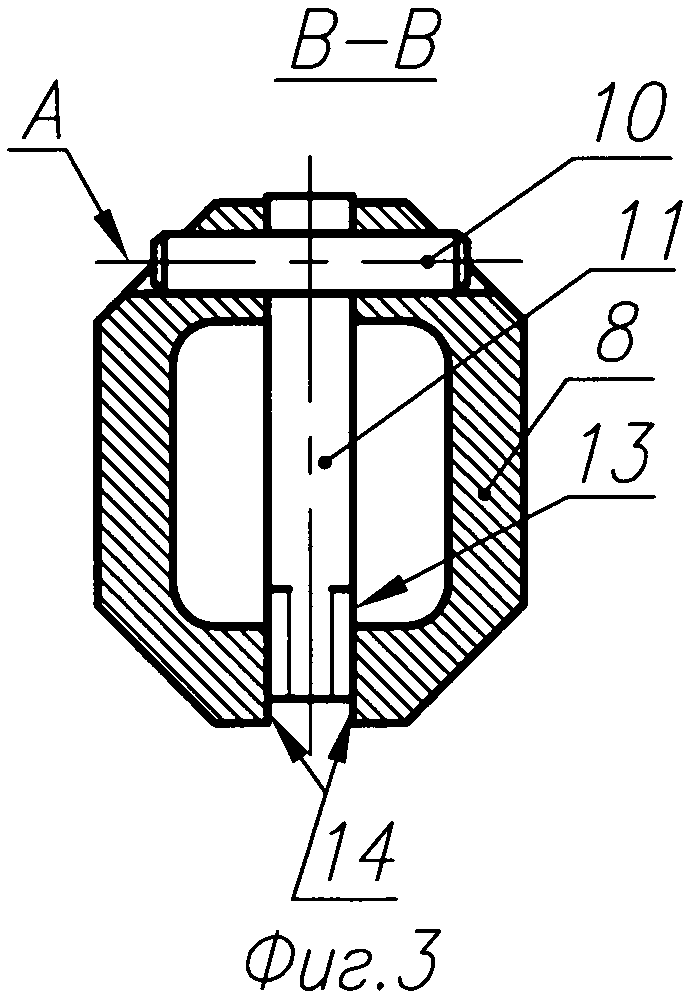
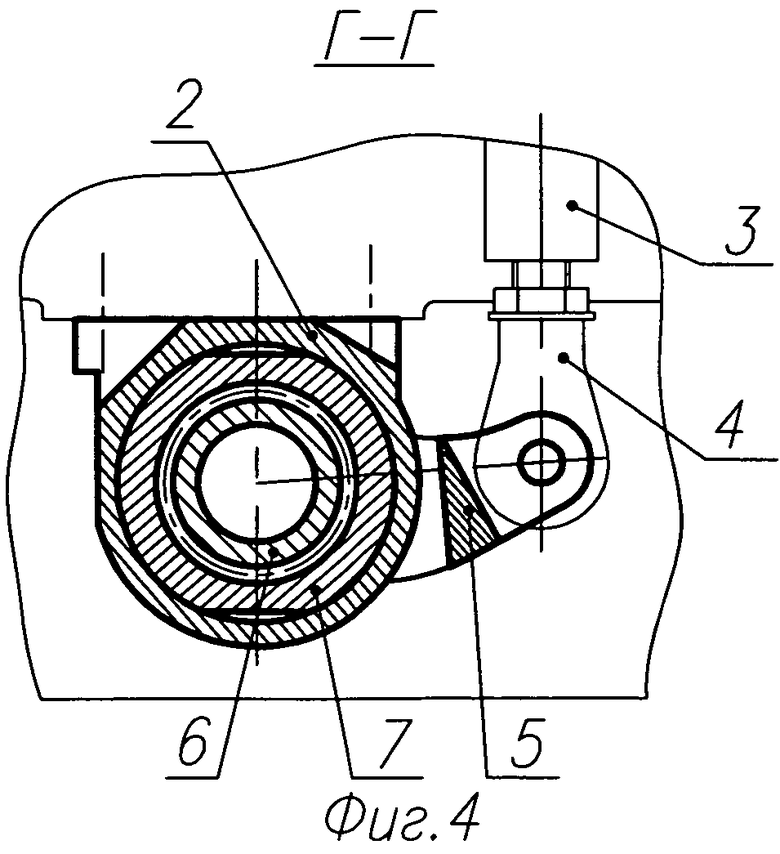
Предлагаемое устройство состоит из крыла (крыло в раскрытом положении), шарнирно установленного на корпусе ракеты 2, рулевой машинки 3, закрепленной в корпусе ракеты 2, штока 4, шарнирно соединенного с рычагом 5, жестко закрепленным на валу 6. С одной стороны вал 6 составляет подвижное шлицевое соединение со сферической опорой 7, установленной в корпусе ракеты 2. С другой стороны вал шарнирно соединен с обоймой 8 при помощи оси 9. Обойма 8 при помощи оси 10 шарнирно соединена с поводком 11, жестко закрепленным на элевоне 12, шарнирно установленном на задней кромке крыла 1, при этом ось А вращения крыла соосна с осью 10 вращения поводка 11. На поводке имеется зуб 13, который при раскрытии крыла входит в паз 14 обоймы 8.
Устройство работает следующим образом. При раскрытии крыла 1 и фиксации его в этом положении на корпусе ракеты 2 зуб 13 поводка 11, в конце раскрытия крыла, продвигаясь, входит в паз 14 обоймы 8. При подаче управляющего сигнала рулевая машинка 3 посредством рычага 5 шарнирно соединена со штоком 4 рулевой машинки, поворачивает вал 6 со сферической опорой 7, совместно с обоймой 8 и с поводком 11, зуб 13 которого расположен в пазу 14 обоймы 8, и управляет отклонением элевона 12.
При этом возможные относительные перемещения, вызываемые неравномерным нагревом крыла 1, элевона 12 и корпуса ракеты 2, а также несоосность оси вращения поводка 11 механизма, жестко закрепленного на элевоне 12 с осью вращения крыла А компенсируется продольными перемещениями вала 6, угловыми перемещениями сферической опоры 7 относительно корпуса 2 и угловыми перемещениями обоймы 8 относительно вала 6.
Предложенная конструкция механизма позволяет компенсировать технологические несовпадения оси вращения крыла и оси вращения поводка 11, обеспечивает управление элевоном 12 складываемого крыла 1 гиперзвуковой ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕВОНОМ | 2012 |
|
RU2518486C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕВОНОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2785389C1 |
| МЕХАНИЗМ СОЕДИНЕНИЯ-РАЗДЕЛЕНИЯ ЭЛЕВОНА СКЛАДЫВАЕМОГО КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2509682C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2482434C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2478907C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2482433C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РУЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2783794C1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2013 |
|
RU2559676C2 |
| Автомобиль с летными свойствами | 2022 |
|
RU2783544C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА, ИМЕЮЩЕГО ПЕРЕДНЕЕ И ЗАДНЕЕ ДЫШЛА | 1969 |
|
SU256521A1 |
Изобретение относится к области ракетной техники и касается устройств управления элевонов складываемого крыла ракеты. Механизм управления элевоном состоит из размещенного на корпусе ракеты вала вращения, соединенного с элевоном, шарнирно установленным на задней кромке крыла, рычага, закрепленного на валу, и рулевой машинки, установленной в корпусе ракеты, шток которой шарнирно соединен с рычагом. Вал, расположенный в корпусе ракеты, жестко соединен с рычагом, шарнирно соединенным со штоком рулевой машинки. Один конец вала со сферической опорой, установленной в корпусе ракеты, составляет подвижное шлицевое соединение. На другом конце вала шарнирно закреплена обойма, шарнирно соединенная с поводком, жестко закрепленным на элевоне складываемого крыла. Ось шарнирного соединения поводка и обоймы совмещена с осью вращения крыла. На поводке выполнен зуб. На обойме выполнен паз, в котором размещен зуб поводка. Достигается обеспечение управления элевоном, расположенным на складываемом крыле, независимо от температурных деформаций составных частей ракеты и от технологических погрешностей при изготовлении и сборке. 4 ил.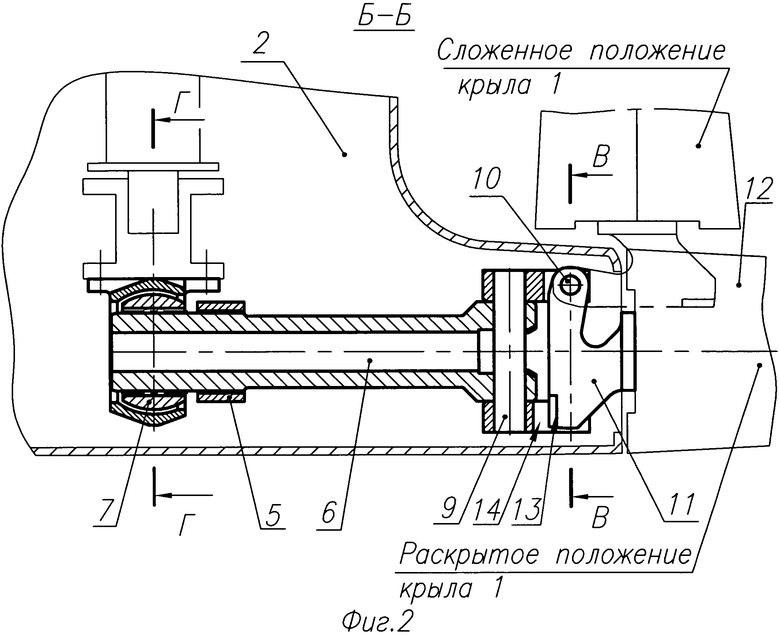
Механизм управления элевоном, состоящий из размещенного на корпусе ракеты вала вращения, соединенного с элевоном, шарнирно установленным на задней кромке крыла, рычага, закрепленного на валу, и рулевой машинки, установленной в корпусе ракеты, шток которой шарнирно соединен с рычагом, отличающийся тем, что вал, расположенный в корпусе ракеты, жестко соединен с рычагом, шарнирно соединенным со штоком рулевой машинки, закрепленной в корпусе ракеты, при этом один конец вала со сферической опорой, установленной в корпусе ракеты, составляет подвижное шлицевое соединение, а на другом конце вала шарнирно закреплена обойма, шарнирно соединенная с поводком, жестко закрепленным на элевоне складываемого крыла, при этом ось шарнирного соединения поводка и обоймы совмещена с осью вращения крыла, на поводке выполнен зуб, на обойме выполнен паз, в котором размещен зуб поводка.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2004 |
|
RU2258865C1 |
| US 3563495 A, 16.02.1971 | |||
| US 4884766 A, 05.12.1989 | |||
| УСТРОЙСТВО РАСКЛАДЫВАНИЯ И ФИКСАЦИИ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2400695C1 |

