Изобретение относится к приборостроению, конкретно к средствам измерения разности давлений в жидких или газообразных средах между двумя источниками, находящимися, как правило, на расстоянии, существенно превышающем габариты дифференциального датчика давления. Изобретение может быть использовано в нефтегазодобывающей, нефтеперерабатывающей, нефтехимической, химической, пищевой и других отраслях промышленности, где требуется технологический контроль давления в жидких и газообразных средах.
Известен преобразователь давления APR-2200D для измерения плотности жидкости в открытых и закрытых емкостях (Интеллектуальный гидростатический преобразователь давления для измерения плотности APR-2200D, http://www.aplisens.ru/catalog/APR-2200D.pdf). Он содержит дифференциальный датчик давления с двумя вынесенными для увеличения базы измерения диафрагменными приемниками давления, которые по трубкам, заполненным жидкостью с известными физическими свойствами, передают давление на входы дифференциального датчика.
Недостатками устройства являются:
- наличие диафрагм, создающих дополнительные погрешности при передаче давления на входы дифференциального датчика, что снижает точность измерений;
- изменение температуры и давления жидкости внутри трубок и диафрагменных приемников давления вызывает изменение ее объема, вследствие чего диафрагмы получают перемещение; в случае разности температур внутри трубок и диафрагменных приемников давления диафрагмы имеют разное перемещение, что создает дополнительную разность давлений в трубках и приводит к ошибкам измерений;
- большие габариты диафрагм; возможность уменьшения габаритов ограничена, так как вызывает прогрессивное увеличение жесткости диафрагм, что приводит к резкому снижению точности измерений; большие габариты диафрагм ограничивают область применения приборов, например, в трубах или скважинах малого диаметра.
Известен преобразователь давления с вынесенной герметичной диафрагмой и контуром коррекции и способ измерения давления (патент RU №2145703 от 28.02.1995).
Преобразователь, в частности, содержит дифференциальный датчик давления с двумя вынесенными диафрагменными приемниками давления, связанными с входами дифференциального датчика давления трубками, заполненными жидкостью с известными физическими свойствами (фиг.11). Преобразователь имеет средства для контроля температуры жидкости в трубках и выносных приемниках давления (фиг.10), что позволяет минимизировать погрешность измерения давления при изменении температуры жидкости в трубках и приемниках.
Недостатком преобразователя является наличие диафрагм, создающих дополнительные погрешности при передаче давления на дифференциальный датчик давления.
Другим недостатком являются большие габариты диафрагм. Возможность уменьшения габаритов ограничена, так как вызывает прогрессивное увеличение жесткости диафрагм, что приводит к резкому снижению точности измерений. Большие габариты диафрагм ограничивают область применения приборов, например, в трубах или скважинах малого диаметра.
Известен плотномер-расходомер жидких или газообразных сред (патент RU №2359247 от 19.11.2007). Устройство, в частности, содержит дифференциальный датчик давления 13, соединенный с вынесенными нижним 6 и верхним 9 приемниками давления подводящими трубками 4, заполненными жидкостью с известными физическими свойствами, которая непосредственно контактирует с рабочей средой и не смешивается с ней. Устройство имеет датчик температуры 11 жидкости в подводящей трубке 4, соединяющей дифференциальный датчик давления 13 с верхним приемником давления 9.
Недостатком устройства является наличие непосредственного контакта жидкости в подводящих трубках 4 с рабочей средой, текущей в основной трубе 3. Движущаяся в основной трубе среда в зоне приемников давления 6 и 9 вовлекает в совместное движение контактирующую с ней жидкость в трубках 4 и уносит ее вместе с потоком рабочей среды. Постепенно жидкость в трубках частично заменяется рабочей средой, что приводит к снижению точности измерений.
Другим недостатком является необходимость подбора свойств жидкости в трубках в зависимости от свойств рабочей среды. В ряде технологических процессов, например в химической, пищевой, фармацевтической промышленности и ряде других производств, недопустим контакт рабочей среды с посторонними средами, что ограничивает область применения устройства.
Известно устройство для гидростатического измерения плотности жидкостей, текущих по трубопроводу (а.с. SU №197250 от 19.04.1966, прототип).
Устройство содержит корпус 2, в котором установлены два измерительных элемента, состоящих из разделителей 9 и пружин 10, которые по существу представляют собой дифференциальные датчики давления. Измерительные элементы разделяют внутреннее пространство корпуса на три камеры: внутреннюю камеру 8, расположенную между измерительными элементами, и две концевые камеры 7, расположенные на концах корпуса устройства. Все камеры заполнены жидкостью с известными физическими свойствами. Каждая камера гидравлически связана со своим источником давления с помощью диафрагменных камер 4, 5 и трубок 6, также заполненных жидкостью с известными физическими свойствами. Разность давлений между концевыми камерами и внутренней камерой преобразуется в перемещение соответствующих измерительных элементов, которые воздействуют на электромеханический суммирующий преобразователь, сигнал с которого подается на вторичный прибор.
Недостатком устройства является наличие диафрагменных камер в точках отбора давления, создающих дополнительные погрешности при передаче давления на измерительные элементы.
Другой недостаток связан с разницей температур жидкости внутри трубок и связанных с ними диафрагменных камерах. Разница температур вызывает различное изменение объема заполняющей их жидкости, вследствие чего диафрагмы перемещаются неодинаково и создают различное дополнительное давление на дифференциальные датчики, что приводит к ошибкам измерений.
Недостатком являются также большие габариты диафрагменных камер. Возможность уменьшения габаритов ограничена, так как вызывает прогрессивное увеличение жесткости диафрагм, что приводит к резкому снижению точности измерений. Большие габариты диафрагм ограничивают область применения приборов, например в трубах или скважинах малого диаметра.
Задачей изобретения является повышение точности измерений, уменьшение габаритов измерительных устройств и расширение области их применения.
Это достигается исключением из измерительных цепей выносных отборников давления, являющихся источниками дополнительных погрешностей измерений и увеличения габаритов приборов.
Дифференциальный преобразователь давления в зависимости от условий применения может существовать в трех вариантах исполнения:
- основной вариант служит для применения в обычных условиях;
- погружной вариант используется для измерения градиентов давления в емкостях или трубах, заполненных жидкостью или газом;
- вариант с гибким корпусом применяется там, где источники давления имеют сложную ориентацию в пространстве, или накладывают монтажные ограничения на габариты прибора, или расположены на значительном удалении друг от друга.
В основном варианте исполнения дифференциальный преобразователь давления содержит корпус, в котором установлены два дифференциальных датчика давления, разделяющих внутреннюю полость корпуса на три камеры. Камеры, расположенные на концах корпуса, служат для приема давления от источников давления. Камера, расположенная между дифференциальными датчиками давления, заполнена жидкостью с известными физическими свойствами и гидравлически связана с одной из камер для приема давления, расположенной на конце корпуса, через разделитель сред с подвижной перегородкой. Дополнительно камера, расположенная между дифференциальными датчиками давления, имеет малое поперечное сечение, а дифференциальный преобразователь давления снабжен датчиком давления и датчиком температуры жидкости в камере между дифференциальными датчиками давления, а также датчиком угла наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали.
В погружном варианте дифференциальный преобразователь давления имеет все признаки основного варианта исполнения устройства. Особенностью является то, что в обеих камерах для приема давления, расположенных на концах корпуса, выполнены сквозные отверстия для подвода давления окружающей среды к дифференциальным датчикам давления по самому короткому пути.
В варианте с гибким корпусом дифференциальный преобразователь давления имеет все признаки основного варианта исполнения устройства за исключением датчика угла наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали. Особенностью устройства является выполнение средней части корпуса в виде гибкой трубки малого диаметра, обеспечивающей легкость присоединения преобразователя к источникам давления, которые имеют сложную ориентацию в пространстве, или накладывают монтажные ограничения на габариты прибора, или расположены на значительном удалении друг от друга. Особенностью устройства также является применение интегрального датчика температуры жидкости, находящейся в гибкой трубке.
Совпадающими признаками прототипа и изобретения являются корпус с установленными в нем двумя дифференциальными датчиками давления, разделяющими внутреннюю полость корпуса на три камеры. Далее, камера, расположенная между дифференциальными датчиками давления, заполнена жидкостью с известными физическими свойствами, и камеры, расположенные на концах корпуса, служат для приема давления от источников давлений. Основным отличительным признаком изобретения является наличие гидравлической связи камеры, расположенной между дифференциальными датчиками давления, с одной из камер для приема давления, расположенной на конце корпуса, через разделитель сред с подвижной перегородкой. Дополнительными отличительными признаками являются выполнение камеры между дифференциальными датчиками давления в виде канала малого поперечного сечения; наличие датчика давления и датчика температуры жидкости в камере, расположенной между дифференциальными датчиками давления; наличие датчика наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали; сквозные отверстия в камерах, расположенных на концах корпуса, для подачи давления внешней среды на дифференциальные датчики давления по самому короткому пути; выполнение средней части корпуса в виде гибкой трубки малого диаметра и наличие интегрального датчика температуры жидкости, находящейся в гибкой трубке.
Основным функциональным отличием изобретения от известных устройств является использование двух дифференциальных датчиков давления для измерения разницы давлений от двух источников. В прототипе и в других известных устройствах для измерения разницы давлений используется только один дифференциальный датчик давления. Именно эта особенность изобретения позволяет размещать дифференциальные датчики давления вблизи источников давления и отказаться от использования выносных отборников давления со всеми присущими им недостатками.
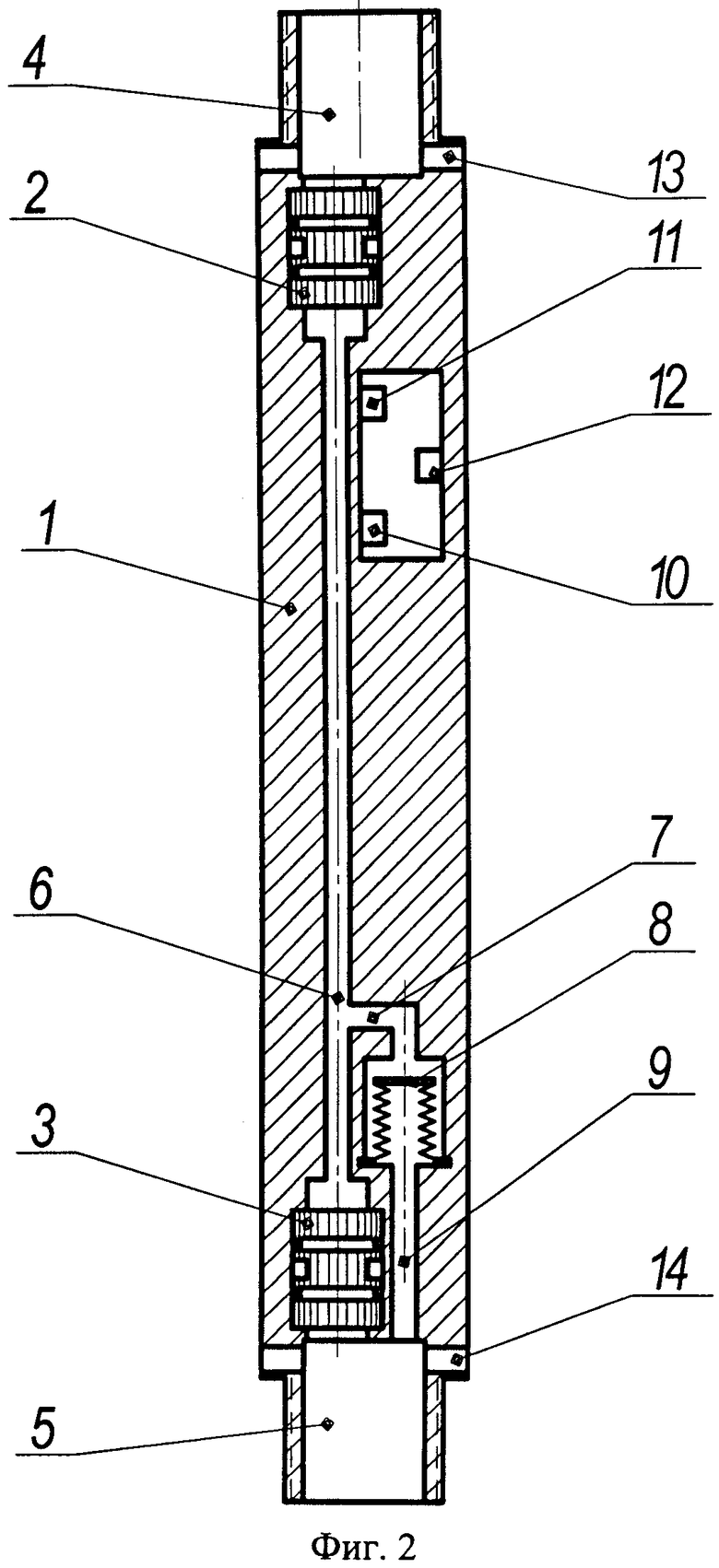
На фиг.1 приведен основной вариант исполнения дифференциального преобразователя давления в продольном разрезе.
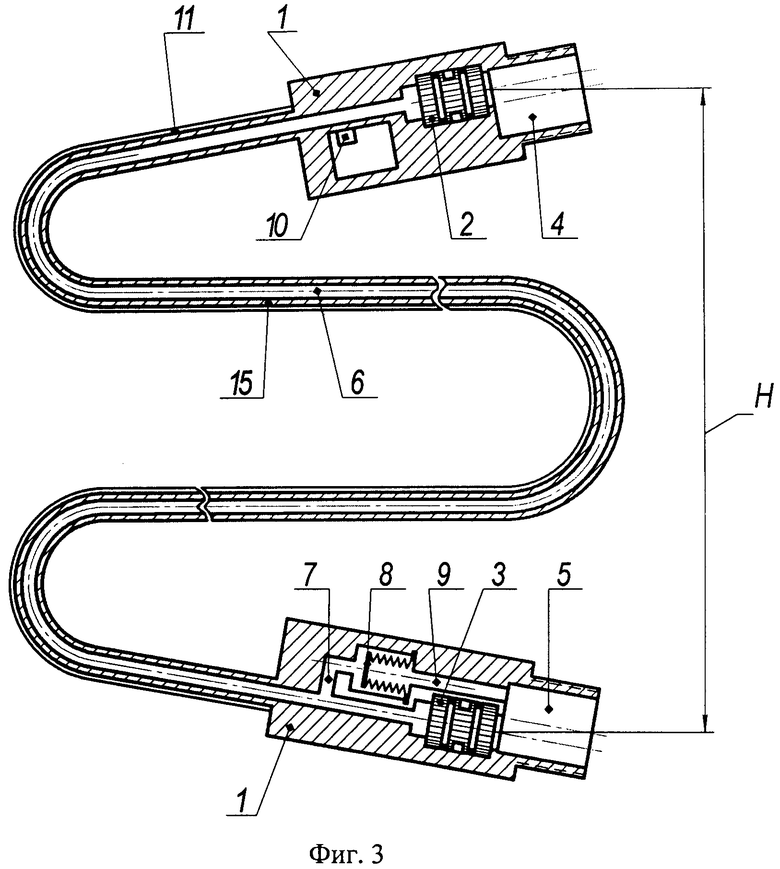
На фиг.2 изображен погружной вариант исполнения дифференциального преобразователя давления в продольном разрезе.
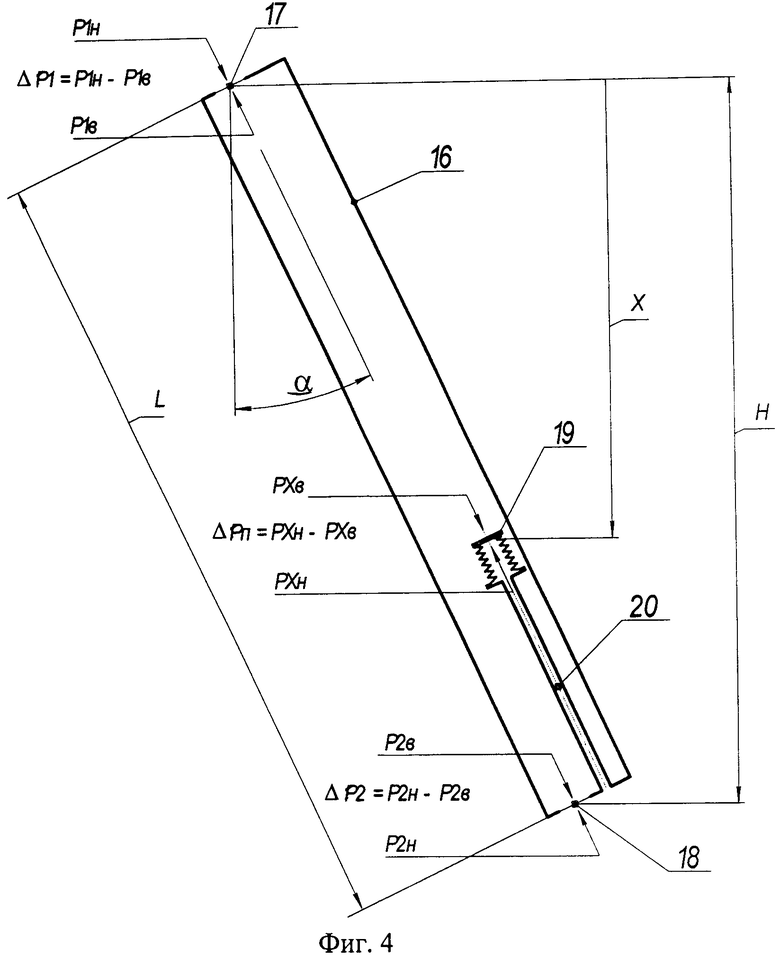
На фиг.3 представлен вариант исполнения дифференциального преобразователя давления с гибким корпусом в продольном разрезе.
На фиг.4 приведена гидравлическая схема дифференциального преобразователя давления.
В основном варианте исполнения (фиг.1) дифференциальный преобразователь давления содержит корпус 1, в котором установлены дифференциальные датчики давления 2 и 3, разделяющие внутреннюю полость корпуса на три камеры. Камеры 4 и 5, расположенные на концах корпуса, служат для приема давления от источников. Камера 6, расположенная между дифференциальными датчиками давления, выполнена в виде канала с малым поперечным сечением и заполнена жидкостью с известными физическими свойствами. Она гидравлически связана каналом 7 с одной из камер, расположенной на конце корпуса (в данном случае с камерой 5) через разделитель сред с подвижной перегородкой 8 и канал 9. Малое поперечное сечение камеры 6 обеспечивает малый объем жидкости в этой камере, малое изменение ее объема при изменении давления и температуры и, следовательно, снижает требования к конструкции разделителя сред. Минимальное сечение камеры в каждом конкретном приборе определяется исходя из допустимых пределов снижения точности измерений, вызванных силами вязкого трения жидкости о стенки камеры. Разделитель сред 8 с подвижной перегородкой может быть выполнен в различных конструктивных вариантах, в том числе в виде сильфона с закрытым торцом, как это показано на фиг.1. Дополнительно дифференциальный преобразователь давления снабжен датчиком давления 10 и датчиком температуры 11 жидкости в камере 6, а также датчиком 12 угла наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали. Дифференциальный преобразователь давления имеет электронную схему (не показана), которая по сигналам от датчиков 2, 3, 10, 11, 12 рассчитывает разницу давлений в камерах 4 и 5 и (или) плотность внешней среды. Она также выводит результаты вычислений на экран дифференциального преобразователя давления или (и) дисплей другого прибора или (и) передает результаты вычислений в сеть (не показана). Электронная схема может быть размещена как в корпусе прибора, так и во внешнем корпусе, связанном с датчиками прибора необходимыми коммуникационными линиями или частично в том и другом корпусах.
Порядок функционирования электронной схемы рассмотрен ниже при описании работы дифференциального преобразователя давления.
Дифференциальный преобразователь давления, представленный на фиг.2, предназначен для погружения в емкости и трубы, заполненные жидкостью или газом, с целью измерения градиентов давления или плотности внешней среды. Поэтому в корпусе 1 в зонах камер 4 и 5 выполнены сквозные отверстия 13 и 14 для подвода давления окружающей среды непосредственно к дифференциальным датчикам давления 2 и 3 по самому короткому пути. В остальном устройства на фиг.2 и фиг.1 полностью идентичны.
Дифференциальный преобразователь давления, показанный на фиг.3, предназначен для установки в тех местах, где гнезда для подсоединения к источникам давления имеют сложную ориентацию в пространстве или ограничения по монтажным габаритам или расположены на большом удалении друг от друга. С целью облегчения монтажа средняя часть корпуса 1 выполнена в виде гибкой трубки 15 малого диаметра. Внутренний канал 6 трубки заполнен жидкостью с известными физическими свойствами. Он гидравлически связывает между собой дифференциальные датчики давления 2 и 3. В корпусе 1 установлен датчик 10 давления жидкости в канале 6. Канал 6 через канал 7, разделитель сред с подвижной перегородкой 8 и канал 9 гидравлически связан с одной из камер для приема давления (в данном случае 5). Датчик 11 температуры жидкости в канале 6 выполнен в виде интегрального сенсора, контактирующего с трубкой 15 на всем ее протяжении. Он может быть выполнен, например, в виде платиновой или медной проволоки, накрученной на внешнюю поверхность трубки. Датчик угла наклона оси, проходящей через центры датчиков 2 и 3, к вертикали в этом варианте исполнения прибора не используется. Расстояние Н (фиг.3) между центрами дифференциальных датчиков 2 и 3 по вертикали, необходимое для подсчета перепада давления, измеряется при монтаже прибора и вручную вводится в программу работы электроники.
Рассмотрим работу дифференциального преобразователя давления, используя гидравлическую схему устройства, приведенную на фиг.4. На схеме изображен корпус преобразователя 16, заполненный жидкостью с известными физическими свойствами. На верхнем и нижнем торцах корпуса показаны чувствительные элементы 17 и 18 дифференциальных датчиков давления. В корпусе установлен разделитель сред с подвижной перегородкой 19, через которую давление среды от нижнего торца корпуса по каналу 20 передается на жидкость, находящуюся внутри корпуса.
На схеме и в тексте использованы следующие обозначения:
L - номинальное расстояние между центрами чувствительных элементов дифференциальных датчиков давления;
Н - расстояние по вертикали между центрами чувствительных элементов дифференциальных датчиков давления;
Х - расстояние по вертикали от центра чувствительного элемента верхнего дифференциального датчика давления до центра подвижной перегородки разделителя сред;
α - угол отклонения от вертикали оси, соединяющей центры чувствительных элементов дифференциальных датчиков давления;
ρB - плотность жидкости внутри корпуса преобразователя (на схеме не указана);
ρH - плотность среды, окружающей корпус преобразователя (на схеме не указана);
g - ускорение свободного падения;
P1H - давление жидкости на верхний чувствительный элемент с внешней стороны корпуса;
P1B - давление жидкости на верхний чувствительный элемент с внутренней стороны корпуса;
ΔP1=P1H-P1B - перепад давления на верхнем чувствительном элементе;
P2H - давление жидкости на нижний чувствительный элемент с внешней стороны корпуса;
P2B - давление жидкости на нижний чувствительный элемент с внутренней стороны корпуса;
Δр2=p2H-p2B - перепад давления на нижнем чувствительном элементе;
PXH - давление жидкости на подвижную перегородку с внешней стороны корпуса;
PXB - давление жидкости на подвижную перегородку с внутренней стороны корпуса;
ΔPП=PXH-PXB - перепад давления на подвижной перегородке.
Найдем математическое уравнение, связывающее перепады давления на дифференциальных датчиках давления с разницей давлений внешней среды, действующей на верхний 17 и нижний 18 датчики давления.
Исходя из принятых обозначений, определим давление PXH внешней жидкости с плотностью ρH на подвижную перегородку 19 в зависимости от давления P2H. Оно равно давлению P2H минус гравитационное давление внешней жидкости на перепаде высот Н-Х

С учетом перепада давления ΔРП на подвижной перегородке получаем

Давление Р1В выразим через PXB, вычитая гидростатическое давление жидкости внутри корпуса с плотностью ρВ на перепаде высот Х

Давление Р2В определим через Р1В прибавляя гидростатическое давление жидкости внутри корпуса с плотностью ρВ на перепаде высот Н

Определим перепад давления ΔP1=P1H-P1B, используя выражение (3)

Перепад давления ΔP2=P2H-P2B определим, используя уравнение (4)
ΔP2=P2H-P2B=Р2Н-Р2Н+ρHg(H-X)+ΔРП+ρBgX-ρBgH=
=ΔРП-ρBg(H-X)+ρHg(H-X)=ΔРП+(ρН-ρВ)g(H-X), или окончательно

Рассмотрим разницу ΔP1-ΔP2, используя выражения (5) и (6)
ΔP1-ΔP2=(P1H-P2H)+ΔРП+ρHg(H-X)+ρBgX-ΔРП-(ρН-ρВ)g(H-X)=
=(P1H-P2H)+ρHgH-ρHgX+ρBgX-ρHgH+ρHgX+ρBgH-ρBgX=
=(P1H-P2H)+ρBgH или

Таким образом, как показывает уравнение (7), измеряемая прибором разница давлений Р1Н-Р2Н в камерах 4 и 5 (фиг.1-3) равна разнице перепадов давлений ΔP1 и ΔР2 на верхнем и нижнем дифференциальных датчиках давления 2 и 3 (фиг.1-3) за вычетом гидростатического перепада давления жидкости в камере между дифференциальными датчиками давления.
Существенно, что ни перепад давления на подвижной перегородке ΔрП, ни положение подвижной перегородки относительно дифференциальных датчиков (координата X) никак не влияют на результат измерений.
В уравнение (7) входит текущая плотность ρВ жидкости в камере между дифференциальными датчиками давления. Она зависит от ее физических свойств, величины абсолютного давления в жидкости и ее температуры. Давление в жидкости и температура могут меняться в широких пределах в процессе эксплуатации прибора. Поэтому необходимо при каждом измерении определять эти величины и вычислять текущую плотность жидкости в камере 6.
Если прибор применяется для измерения градиентов давления в емкостях или трубах, то по его показаниям можно определять плотность ρН окружающей среды при условии, что скорость движения среды относительно прибора и скважины равна нулю. В противном случае необходимо учитывать дополнительный перепад давления, обусловленный силами трения среды о ствол скважины и корпус прибора, а также динамический перепад давления, если скорость потока среды в зонах расположения дифференциальных датчиков давления не одинакова.
В этом случае перепад давления между чувствительными элементами 18 и 17 равен гидростатическому перепаду давления во внешней среде между уровнями расположения этих элементов. То есть с учетом (7) имеем соотношение
Р2Н-Р1Н=ΔР2-ΔР1+ρBgH=ρHgH.
Из него следует:

Расстояние по вертикали Н между центрами чувствительных элементов можно выразить через номинальное расстояние между ними L и угол α наклона оси, проходящей через центры чувствительных элементов, к вертикали Н=L. Подставляя это выражение в (7) и (8) получаем


Если дифференциальный преобразователь давления (фиг.2) используется для измерения плотности внешней среды и находится в составе комплексного прибора, имеющего датчик давления внешней среды, то датчик давления 10 жидкости в камере 6 может отсутствовать, так как давление в камере 6 отличается от давления внешней среды незначительно. Разницу в основном определяет перепад давления на подвижной перегородке 8, который не может быть выше предела измерения дифференциального датчика давления, иначе он будет поврежден. Как показывают теоретические оценки, для обеспечения высокой точности работы плотномера с измерительной базой 1 метр пределы измерения дифференциальных датчиков давления не должны превышать 1 атмосферы. Если оценка давления в камере 6 осуществляется по показаниям датчика давления внешней среды, то ошибка в одну или менее атмосферы вызовет незначительную погрешность при определении плотности жидкости, заполняющей камеру 6, из-за ее малой сжимаемости, и она не окажет существенного влияния на точность измерений.
Для обеспечения работы прибора его электронная схема должна выполнять следующие функции:
- определять перепады давления на дифференциальных датчиках давления;
- определять абсолютное давление жидкости в камере между дифференциальными датчиками давления и ее температуру;
- рассчитывать текущую плотность жидкости в камере между дифференциальными датчиками давления;
- определять угол наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали (за исключением варианта прибора с гибким корпусом);
- определять перепад давления между источниками давления по формуле (9);
- определять плотность внешней среды по формуле (10);
- осуществлять вывод результатов измерений на собственный дисплей или (и) дисплей другого прибора или (и) выводить полученную информацию в сеть.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОТНОМЕР ГИДРОСТАТИЧЕСКИЙ СКВАЖИННЫЙ | 2011 |
|
RU2483284C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ С ВЫНЕСЕННОЙ ГЕРМЕТИЧНОЙ ДИАФРАГМОЙ И КОНТУРОМ КОРРЕКЦИИ И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1995 |
|
RU2145703C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ И УРОВНЯ ЖИДКОСТИ | 2015 |
|
RU2604477C1 |
| ИЗМЕРИТЕЛЬ РАСХОДА ЖИДКОСТИ ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ | 2007 |
|
RU2365878C2 |
| Способ настройки измерительного канала расхода среды с сужающим устройством | 2018 |
|
RU2682540C1 |
| Дифференциальный датчик давления | 1989 |
|
SU1811596A3 |
| Датчик разности давлений | 1990 |
|
SU1760418A1 |
| ТОПЛИВНЫЙ ЭЛЕМЕНТ СО ВСТРОЕННЫМ УПРАВЛЕНИЕМ ТЕКУЧИМИ СРЕДАМИ | 2006 |
|
RU2399121C2 |
| СТРУЙНЫЙ РАСХОДОМЕР И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2421690C2 |
| ГЛУБИННЫЙ ДАТЧИК РАСХОДА БУРОВОГО РАСТВОРА | 2011 |
|
RU2485309C1 |
Изобретение относится к нефтегазодобывающей, нефтеперерабатывающей, нефтехимической, химической, пищевой и другим отраслям промышленности, где требуется контроль давления в жидких и газообразных средах. Техническим результатом изобретения является повышение точности измерения разности давлений, уменьшение габаритов измерительных устройств и расширение области их применения. Дифференциальный преобразователь давления содержит корпус с двумя дифференциальными датчиками давления, разделяющими внутреннюю полость корпуса на три камеры, две из которых, расположенные на концах корпуса, служат для подсоединения к источникам давления, а камера, расположенная между дифференциальными датчиками давления, заполнена жидкостью с известными физическими свойствами. Камера между дифференциальными датчиками давления имеет разделитель сред с подвижной перегородкой, гидравлически связанный с одной из камер, служащей для подсоединения к источнику давления. 4 ил., 10 з.п. ф-лы.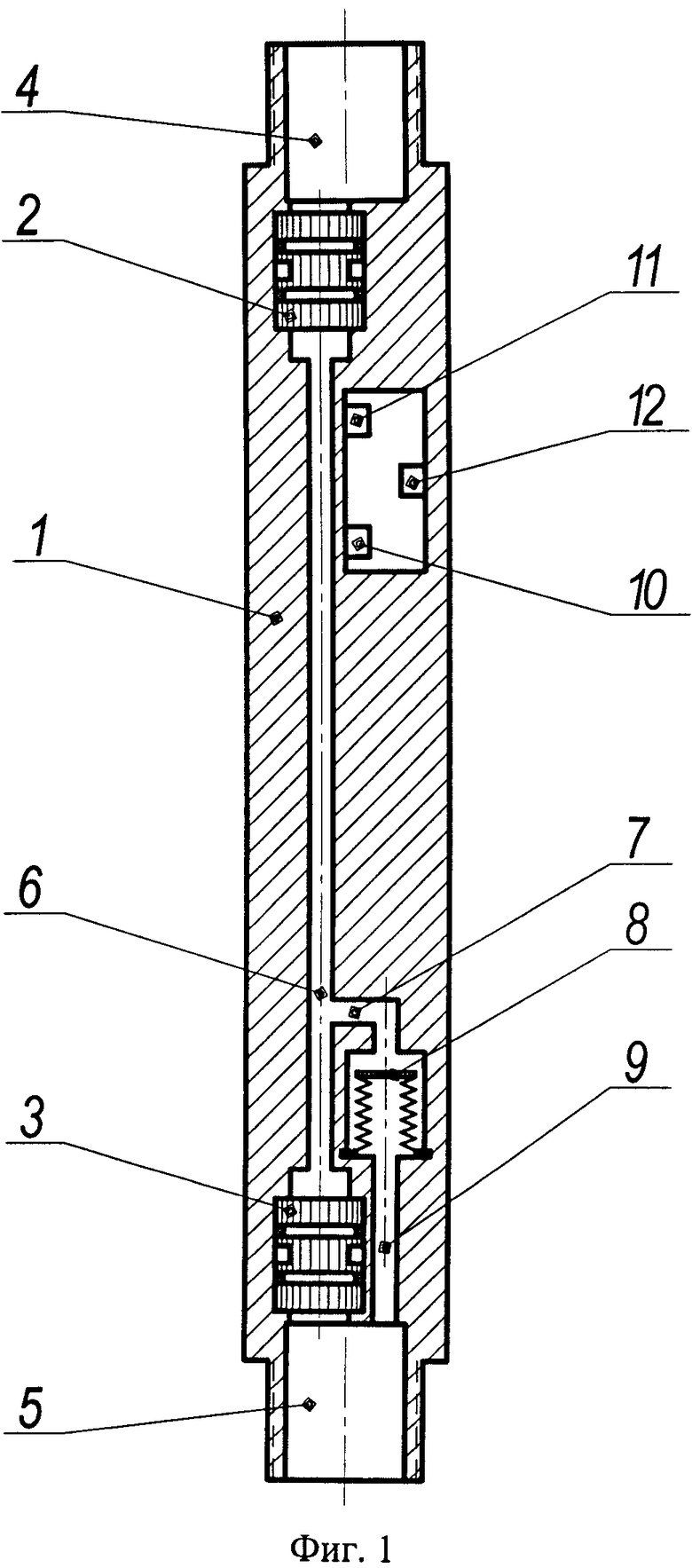
1. Дифференциальный преобразователь давления, содержащий корпус с двумя дифференциальными датчиками давления, разделяющими внутреннюю полость корпуса на три камеры, две из которых, расположенные на концах корпуса, служат для подсоединения к источникам давления, а камера, расположенная между дифференциальными датчиками давления, заполнена жидкостью с известными физическими свойствами, отличающийся тем, что камера между дифференциальными датчиками давления имеет разделитель сред с подвижной перегородкой, гидравлически связанный с одной из камер, служащей для подсоединения к источнику давления.
2. Дифференциальный преобразователь давления по п.1, отличающийся тем, что камера, расположенная между дифференциальными датчиками давления, выполнена в виде канала малого поперечного сечения.
3. Дифференциальный преобразователь давления по п.2, отличающийся тем, что средняя часть корпуса выполнена в виде гибкой трубки малого диаметра.
4. Дифференциальный преобразователь давления по п.3, отличающийся тем, что датчик температуры жидкости, находящийся в камере между дифференциальными датчиками давления, выполнен в виде интегрального сенсора температуры, контактирующего с гибкой трубкой на всем ее протяжении.
5. Дифференциальный преобразователь давления по п.1, отличающийся тем, что камеры для подсоединения к источникам давления имеют сквозные каналы для подвода давления окружающей среды к дифференциальным датчикам давления по кратчайшему пути.
6. Дифференциальный преобразователь давления по п.5, отличающийся тем, что средняя часть корпуса выполнена в виде гибкой трубки малого диаметра.
7. Дифференциальный преобразователь давления по п.6, отличающийся тем, что датчик температуры жидкости, находящийся в камере между дифференциальными датчиками давления, выполнен в виде интегрального сенсора температуры, контактирующего с гибкой трубкой на всем ее протяжении.
8. Дифференциальный преобразователь давления по п.1, отличающийся тем, что он содержит датчик давления и датчик температуры жидкости, находящийся в камере, расположенной между дифференциальными датчиками давления.
9. Дифференциальный преобразователь давления по п.8, отличающийся тем, что камеры для подсоединения к источникам давления имеют сквозные каналы для подвода давления окружающей среды к дифференциальным датчикам давления по кратчайшему пути.
10. Дифференциальный преобразователь давления по п.1, отличающийся тем, что он содержит датчик угла наклона оси, проходящей через центры дифференциальных датчиков давления, к вертикали.
11. Дифференциальный преобразователь давления по п.10, отличающийся тем, что камеры для подсоединения к источникам давления имеют сквозные каналы для подвода давления окружающей среды к дифференциальным датчикам давления по кратчайшему пути.
| 0 |
|
SU197250A1 | |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ СО СДВОЕННЫМИ ДАТЧИКАМИ | 1994 |
|
RU2143665C1 |
| ПЛОТНОМЕР ЖИДКИХ ИЛИ ГАЗООБРАЗНЫХ СРЕД | 2007 |
|
RU2348918C2 |
| Преобразователь разности давлений | 1979 |
|
SU775642A1 |
| WO 8703088 A1, 21.08.1987. | |||

