ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству и способу для управления бесступенчатой трансмиссией ременного типа, чтобы выполнять управление с проскальзыванием ремня, при котором ремень, обмотанный вокруг шкивов, подвергается проскальзыванию с заданной скоростью проскальзывания.
УРОВЕНЬ ТЕХНИКИ
Известный контроллер бесступенчатой трансмиссии ременного типа сконфигурирован для выполнения управления с проскальзыванием ремня, при котором действующее вторичное гидравлическое давление понижается от такового во время нормального управления, чтобы осуществлять проскальзывание ремня, обмотанного вокруг шкивов, с заданной скоростью проскальзывания посредством следующих этапов:
(a) наложения заданного синусоидального изменения на командное вторичное гидравлическое давление или колебание командно вторичного гидравлического давления, и
(b) выполнения управления с проскальзыванием ремня посредством регулирования действующего вторичного гидравлического давления на основе элемента перемножения колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение.
Это устраняет необходимость в непосредственном детектировании скорости проскальзывания ремня и, тем самым, облегчает управление с проскальзыванием ремня (например, см. WO 2009/007450 A2 (PCT/EP2008/059092)).
ПРОБЛЕМЫ, НА РЕШЕНИЕ КОТОРЫХ НАПРАВЛЕНО ИЗОБРЕТЕНИЕ
Однако есть проблема с таким традиционным контроллером бесступенчатой трансмиссии ременного типа по той причине, что высокая скорость изменения крутящего момента, подаваемая на бесступенчатую трансмиссию ременного типа, повышает скорость изменения командного вторичного гидравлического давления, которое изменяется вслед за скоростью изменения входного крутящего момента, так что нельзя провести различие (различать) между составляющей командного вторичного гидравлического давления и колебательной составляющей для детектирования скорости проскальзывания из характеристики действующего вторичного гидравлического давления; таким образом, неуместно выполнять управление с проскальзыванием ремня на основании элемента умножения колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и составляющей, включенной в действующее передаточное отношение. Соответственно, большое проскальзывание ремня может возникать в зависимости от величины крутящего момента, подводимого к бесступенчатой трансмиссии ременного типа.
Ввиду решения вышеприведенной проблемы задачей настоящего изобретения является создание устройства и способа управления для бесступенчатой трансмиссии ременного типа, которые могут уменьшать энергопотребление привода вследствие уменьшения трения ремня, когда точность оценки состояния проскальзывания ремня высока, а также могут предохранять ремень от сильного проскальзывания во время управления с проскальзыванием ремня, когда точность оценки состояния проскальзывания ремня является низкой.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ
Для достижения вышеприведенной цели устройство управления для бесступенчатой трансмиссии ременного типа согласно настоящему изобретению включает в себя первичный шкив для приема подводимой мощности от источника привода, вторичный шкив для выдачи отдаваемой мощности на ведущее колесо и ремень, обмотанный вокруг первичного шкива и вторичного шкива, для регулирования передаточного отношения, определенного отношением радиусов движения ремня на шкивах, посредством регулирования первичного гидравлического давления на первичный шкив и вторичного гидравлического давления на вторичный шкив. Устройство дополнительно содержит средство управления с проскальзыванием ремня, сконфигурированное для колебания вторичного гидравлического давления и контроля разности фаз между колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение, чтобы оценивать состояние проскальзывания ремня, и регулировать действующее вторичное гидравлическое давление для уменьшения на основе оценки, чтобы поддерживать заданное состояние проскальзывания ремня, и средство определения разрешения управления с проскальзыванием ремня, сконфигурированное для разрешения средству управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемого на бесступенчатую трансмиссию ременного типа, является меньшей, чем заданное значение, при котором могут быть разделены отклонение в действующем вторичном гидравлическом давлении и колебательная составляющая, обусловленная колебанием, включенным в действующее вторичное гидравлическое давление.
РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
Таким образом, согласно устройству управления для бесступенчатой трансмиссии ременного типа средство определения разрешения управления с проскальзыванием ремня разрешает средству управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемая на бесступенчатую трансмиссию ременного типа, является меньшей, чем заданное значение. То есть при управлении с проскальзыванием ремня, поскольку состояние проскальзывания ремня оценивается с использованием колебательной составляющей, включенной в действующее вторичное гидравлическое давление посредством колебания, скорость изменения крутящего момента, подаваемая на бесступенчатую трансмиссию ременного типа, оказывает влияние на выделение колебательной составляющей, обусловленной колебанием, включенным в действующее вторичное гидравлическое давление. Когда скорость изменения входного крутящего момента является меньшей, чем заданное значение, отклонение действующего вторичного гидравлического давления и колебательная составляющая, обусловленная колебанием, могут разделяться. Между тем, когда скорость изменения входного крутящего момента превышает заданное значение, колебательная составляющая действующего вторичного гидравлического давления, обусловленная колебанием, пропадает, так что отклонение действующего вторичного гидравлического давления и колебательная составляющая, обусловленная колебанием, не могут быть разделены. В противоположность, когда скорость изменения входного крутящего момента с высокой точностью оценки состояния проскальзывания ремня ниже, чем заданное значение, управление с проскальзыванием ремня разрешается, уменьшая трение ремня, благодаря снижению гидравлического давления шкива, и снижая приводную нагрузку на механизм трансмиссии. Между тем, когда скорость изменения входного крутящего момента с высокой точностью оценки состояния проскальзывания ремня превышает заданное значение, управление с проскальзыванием ремня не разрешается, предохраняя ремень от сильного проскальзывания, как в случае, когда управление с проскальзыванием ремня разрешается независимо от скорости изменения входного крутящего момента. Это позволяет снижать энергопотребление привода вследствие уменьшения трения ремня, когда точность оценки состояния проскальзывания ремня высока, а также может предохранять ремень от сильного проскальзывания во время управления с проскальзыванием ремня, когда точность оценки состояния проскальзывания ремня низка.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - полная система из системы привода и системы управления транспортного средства, включающего в себя бесступенчатую трансмиссию ременного типа, применяемую с устройством и способом управления согласно первому варианту осуществления;
Фиг.2 - вид в перспективе механизма бесступенчатой трансмиссии ременного типа, применяемого с устройством и способом управления согласно первому варианту осуществления;
Фиг.3 - вид в перспективе части ремня механизма бесступенчатой трансмиссии ременного типа, применяемой с устройством и способом управления согласно первому варианту осуществления;
Фиг.4 - структурная схема управления регулированием давления в магистрали и регулированием вторичного гидравлического давления (нормального управления/управления с проскальзыванием ремня), выполняемых блоком 8 управления CVT (БУ CVT), согласно первому варианту осуществления;
Фиг.5 - базовая блок-схема последовательности операций способа для процесса переключения между нормальным управлением и управлением с проскальзыванием ремня (= BSC) над вторичным гидравлическим давлением, выполняемого блоком управления 8 CVT, согласно первому варианту осуществления;
Фиг.6 - блок-схема последовательности операций способа для полного процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.7 - блок-схема последовательности операций способа для процесса ограничения крутящего момента из процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.8 - блок-схема последовательности операций способа для процесса колебания и коррекции вторичного гидравлического давления из процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.9 - блок-схема последовательности операций способа для процесса возврата от управления с проскальзыванием ремня к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.10 - блок-схема последовательности операций способа для процесса ограничения крутящего момента из процесса возврата к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.11 - блок-схема последовательности операций способа для процесса ограничения передачи из процесса возврата к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления;
Фиг.12 - временная диаграмма, иллюстрирующая характеристику (пунктирная линия) входного крутящего момента трансмиссии, которая является крутящим моментом, подаваемым на бесступенчатую трансмиссию ременного типа при управлении с проскальзыванием ремня, и когда скорость изменения крутящего момента велика, и характеристику (сплошная линия) входного крутящего момента трансмиссии, которая является крутящим моментом, подаваемым на бесступенчатую трансмиссию ременного типа при управлении с проскальзыванием ремня, и когда скорость изменения крутящего момента мала;
Фиг.13 - временная диаграмма, иллюстрирующая характеристику (пунктирная линия) действующего вторичного гидравлического давления, когда скорость изменения крутящего момента у входного крутящего момента трансмиссии велика при управлении с проскальзыванием ремня, и характеристику (сплошная линия) действующего вторичного гидравлического давления, когда скорость изменения крутящего момента у входного крутящего момента трансмиссии мала;
Фиг.14 - временная диаграмма соответственных характеристик флажкового признака работы BSC, флажкового признака запрета F/B (вторичного) давления SEC, открывания акселератора, скорости транспортного средства, крутящего момента двигателя, передаточного числа, гидравлического давления SEC, величины коррекции тока SEC_SOL (вторичного соленоида) и разности фаз между колебанием давления SEC и колебанием передаточного числа в эпизоде движения во время перевода управления с нормального управления, управления с проскальзыванием ремня, управления возвратом к нормальному управлению; и
Фиг.15 - временная диаграмма управления ограничением крутящего момента для иллюстрации управления возвратом от управления с проскальзыванием ремня к нормальному управлению.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В дальнейшем, наилучший вариант для осуществления устройства и способа управления для бесступенчатой трансмиссии ременного типа будет описан с использованием первого варианта осуществления со ссылкой на прилагаемые чертежи.
Первый вариант осуществления изобретения
Прежде всего, описана структура устройства. Фиг.1 показывает полную систему из системы привода и системы управления транспортного средства, включающего в себя бесступенчатую трансмиссию ременного типа, применяемую с устройством и способом управления согласно первому варианту осуществления. Фиг.2 является видом в перспективе механизма бесступенчатой трансмиссии ременного типа, применяемого с устройством и способом управления согласно первому варианту осуществления. Фиг.3 представляет собой вид в перспективе части ремня механизма бесступенчатой трансмиссии ременного типа, применяемого с устройством и способом управления согласно первому варианту осуществления. В последующем, структуры системы описаны со ссылкой на фиг.1-3.
На фиг.1, система привода транспортного средства, включающая в себя бесступенчатую трансмиссию ременного типа, содержит двигатель 1, гидротрансформатор 2, механизм 3 переключения привода переднего хода/заднего хода, механизм 4 бесступенчатой трансмиссии ременного типа, механизм 5 последней понижающей ступени и ведущие колеса 6, 6.
Выходной крутящий момент двигателя 1 является регулируемым сигналом управления двигателем, подаваемым снаружи в дополнение к операции разгона от водителя. Двигатель 1 включает в себя исполнительный механизм 10 регулирования выходного крутящего момента для регулирования выходного крутящего момента посредством операции открывания/закрывания дроссельной заслонки, операции отсечки топлива и тому подобного.
Гидротрансформатор 2 является пусковым элементом с функцией увеличения крутящего момента и включает в себя блокировочную муфту 20, чтобы быть способным к непосредственному соединению выходного вала 11 двигателя (= входного вала гидротрансформатора) и выходного вала 21 гидротрансформатора, когда функция увеличения крутящего момента не требуется. Гидротрансформатор 2 составлен из ротора 23 гидротурбины, соединенного с выходным валом 11 двигателя через корпус 22 гидротрансформатора, центробежного насоса 24, соединенного с выходным валом 21 гидротрансформатора, и статора 26, установленного через муфту 25 свободного хода.
Механизм 3 переключения привода переднего хода/заднего хода переключает направление вращения, подведенного к механизму 4 бесступенчатой трансмиссии ременного типа, между нормальным направлением вращения во время движения вперед и обратным направлением движения во время движения назад. Механизм 3 переключения переднего хода/заднего хода включает в себя планетарную передачу 30 с двумя сателлитами, муфту 31 переднего хода и тормоз 32 заднего хода. Солнечная шестерня планетарной передачи 30 с двумя сателлитами соединена с выходным валом 21 гидротрансформатора, а ее водило соединено с входным валом 40 трансмиссии. Муфта 31 переднего хода зажата во время движения вперед, чтобы непосредственно соединять солнечную шестерню и водило планетарной передачи 30 с двумя сателлитами. Тормоз 32 заднего хода зажат во время движения назад, чтобы стопорить коронную шестерню планетарной передачи 30 с двумя сателлитами по отношению к корпусу.
Механизм 4 бесступенчатой трансмиссии 4 ременного типа имеет функцию бесступенчатой регулируемой передачи, чтобы бесступенчато менять передаточное отношение посредством изменения радиуса контакта ремня. Передаточное отношение является отношением входной частоты вращения входного вала 40 трансмиссии и выходной частоты вращения выходного вала 41 трансмиссии. Механизм 4 бесступенчатой трансмиссии ременного типа включает в себя первичный шкив 42, вторичный шкив 43 и ремень 44. Первичный шкив 42 составлен из неподвижного шкива 42a и скользящего шкива 42b. Скользящий шкив 42b плавно перемещается первичным гидравлическим давлением, введенным в камеру 45 первичного гидравлического давления. Вторичный шкив 43 составлен из неподвижного шкива 43a и скользящего шкива 43b. Скользящий шкив 43b плавно перемещается первичным гидравлическим давлением, введенным в камеру 46 вторичного гидравлического давления. Ремень 44, как показано на фиг.2, обмотан вокруг клиновидных поверхностей 42c, 42d желобчатого обода первичного шкива 42 и клиновидных поверхностей 43c, 43d желобчатого обода вторичного шкива 43. На фиг.3, ремень 44 сформирован из двух многослойных колец 44a, 44a, у которых большое количество колец наслоено изнутри наружу, а также большого количества элементов 44b обжимных разрезных пластин, помещенных между двумя многослойными кольцами 44a, 44a и соединенными друг с другом в форме кольца.
Каждый из элементов 44b включает в себя, по обеим сторонам, боковые поверхности 44c, 44c для контакта с поверхностями 42c, 42d желобчатого обода первичного шкива 42 и поверхностями 43c, 43d желобчатого обода вторичного шкива 43.
Механизм 5 последней понижающей ступени замедляет выходное вращение трансмиссии с выходного вала 41 трансмиссии механизма 4 бесступенчатой трансмиссии ременного типа и придает ему дифференциальную функцию для передачи его на правое и левое ведущие колеса 6, 6. Механизм 5 последней понижающей ступени вставлен между выходным валом 41 трансмиссии, промежуточным валом 50, правым и левым ведущими валами 51, 51 и включает в себя первую передачу 52, вторую передачу 53, третью передачу 54 и четвертую передачу с функцией замедления и зубчатую дифференциальную передачу 56 с функцией дифференциала.
Система управления бесступенчатой трансмиссии ременного типа содержит блок 7 регулирования гидравлического давления передачи и блок 8 управления CVT, как показано на фиг.1.
Блок 7 регулирования гидравлического давления передачи является блоком регулирования гидравлического давления для создания первичного гидравлического давления, вводимого в камеру 45 первичного гидравлического давления, и вторичного гидравлического давления, вводимого в камеру 46 вторичного гидравлического давления. Блок 7 регулирования гидравлического давления передачи содержит масляный насос 70, клапан 71 регулятора, соленоид 72 давления в магистрали, клапан 73 управления передачей, декомпрессионный клапан 74, соленоид 75 вторичного гидравлического давления, тягу 76 сервопривода, командный клапан 77 передачи и шаговый электродвигатель 78.
Клапан 71 регулятора использует разряженное давление из масляного насоса 70 в качестве источника давления для настройки давления PL в магистрали. Клапан 71 регулятора включает в себя соленоид 72 давления в магистрали для настройки давления масла из масляного насоса 70 на заданное давление PL в магистрали в ответ на команду из блока 8 управления CVT.
Клапан 73 управления передачей использует давление PL в магистрали, создаваемое клапаном 71 регулятора, в качестве источника давления для настройки первичного гидравлического давления, вводимого в камеру 45 первичного гидравлического давления. Золотник 73a клапана 73 управления передачей соединен с тягой 76 сервопривода, составляющей механизм механической обратной связи, и командный клапан 77 передачи, соединенный с одним концом тяги 76 сервопривода, приводится в действие шаговым электродвигателем 78, так что клапан управления передачей принимает обратную связь положения скольжения (действующего передаточного отношения ременной передачи) со скользящего шкива 42b первичного шкива 42, соединенного с другим концом тяги 76 сервопривода. То есть во время передачи, когда шаговый электродвигатель 78 приводится в действие в ответ на команду из блока 8 управления CVT, золотник 73a клапана 73 управления передачей переключается в положение для подачи/выпуска давления PL в магистрали в/из камеры 45 первичного гидравлического давления, чтобы настраивать первичное гидравлическое давление для получения целевого передаточного отношения, требуемого командой в положении привода шагового электродвигателя 78. По завершении передачи золотник 73a удерживается в закрытом положении в ответ на смещение тяги 76 сервопривода.
Декомпрессионный клапан 74 использует давление PL в магистрали, создаваемое клапаном 71 регулятора, в качестве источника давления для настройки вторичного гидравлического давления, вводимого в камеру 46 вторичного гидравлического давления, посредством снижения давления. Декомпрессионный клапан 74 содержит соленоид 75 вторичного гидравлического давления для уменьшения давления PL в магистрали до командного вторичного гидравлического давления в соответствии с командой из блока 8 управления CVT.
Блок 8 управления CVT сконфигурирован для выполнения различного управления, такого как регулирование передаточного отношения для выдачи на шаговый электродвигатель 78 команды управления для получения целевого передаточного отношения в соответствии со скоростью транспортного средства, уровнем открывания дросселя и тому подобным, регулирование давления в магистрали для выдачи на соленоид 72 давления в магистрали команды управления для получения целевого давления в магистрали в соответствии с уровнем открывания дросселя или тому подобным, регулирования вторичного гидравлического давления для выдачи на соленоид 75 вторичного гидравлического давления команды управления для получения целевого тягового усилия вторичного шкива в соответствии с входным крутящим моментом передачи или тому подобным, управление переключением переднего хода и заднего хода для управления зажиманием и отпусканием муфты 31 переднего хода и тормоза 32 заднего хода и управление блокировкой для управления зажиманием и отпусканием блокировочной муфты 20. Блок 8 управления CVT принимает различную информацию датчиков и информацию ключей с датчика 80 первичного вращения, датчика 81 вторичного вращения, датчика 82 вторичного гидравлического давления, датчика 83 температуры масла, ключа 84 схемы запрета, ключа 85 тормоза, датчика 86 открывания акселератора и других датчиков и ключей 87. Кроме того, он принимает информацию о крутящем моменте из блока 88 управления двигателем (БУД) и выдает требование крутящего момента в блок 88 управления двигателем.
Фиг.4 является структурной схемой управления регулированием давления в магистрали и регулированием вторичного гидравлического давления (нормального управления/управления с проскальзыванием ремня), выполняемых блоком 8 управления CVT согласно первому варианту осуществления.
Система регулирования гидравлического давления блока 8 управления CVT в первом варианте осуществления содержит вычислитель 90 базового гидравлического давления, регулятор 91 давления в магистрали, регулятор 92 вторичного гидравлического давления, регулятор 93 синусоидальных колебаний и корректор 94 вторичного гидравлического давления, как показано на фиг.4.
Вычислитель 90 базового гидравлического давления включает в себя вычислитель 90a входного крутящего момента для расчета входного крутящего момента передачи на основе информации о крутящем моменте (скорости вращения двигателя, времени впрыска топлива и тому подобного), из блока 88 управления двигателем (см. фиг.1), вычислитель 90b базового вторичного тягового усилия для расчета базового вторичного тягового усилия (усилия зажима ремня, необходимого для вторичного шкива 43) из входного крутящего момента передачи, полученного вычислителем 90a входного крутящего момента, вычислитель 90c требуемой разницы тяговых усилий передачи для расчета разности тяговых усилий, требуемой для передачи (разности в усилии зажима ремня между первичным и вторичным шкивами 42, 43), корректор 90d для коррекции рассчитанного базового вторичного тягового усилия на основе требуемой разности тяговых усилий для передачи и преобразователь 90e вторичного гидравлического давления для преобразования скорректированного вторичного тягового усилия в целевое вторичное гидравлическое давление. Он дополнительно включает в себя вычислитель 90f базового первичного тягового усилия для расчета базового первичного тягового усилия (усилия зажима ремня, требуемого первичным шкивом 42) из входного крутящего момента передачи, рассчитанного вычислителем 90a входного крутящего момента, корректор 90g для коррекции рассчитанного базового первичного тягового усилия на основе требуемой разности тяговых усилий для передачи, рассчитанной вычислителем 90c требуемой разности тяговых усилий, и преобразователь 90h первичного гидравлического давления для преобразования скорректированного первичного тягового усилия в целевое первичное гидравлическое давление.
Регулятор 91 давления в магистрали включает в себя определитель 91a целевого давления в магистрали для сравнения целевого первичного гидравлического давления, выведенного из преобразователя 90h первичного гидравлического давления, с командным вторым гидравлическим давлением, выданным из регулятора 92 вторичного гидравлического давления, и установки целевого давления в магистрали в целевое первичное гидравлическое давление, когда целевое первичное гидравлическое давление ≥ командного вторичного гидравлического давления, и установки целевого давления в магистрали во вторичное гидравлическое давление, когда целевое первичное гидравлическое давление < командного вторичного гидравлического давления, и преобразователь 91b гидравлического давления в ток для преобразования целевого давления в магистрали, определенного определителем 91a целевого давления в магистрали, в значение тока, подводимое к соленоиду, и выдачи преобразованного командного значения тока на соленоид 72 давления в магистрали клапана 71 регулятора.
При нормальном управлении регулятор 92 вторичного гидравлического давления выполняет регулирование с обратной связью с использованием действующего вторичного гидравлического давления, детектированного датчиком 82 вторичного гидравлического давления, для получения командного вторичного гидравлического давления, тогда как при управлении с проскальзыванием ремня он выполняет управление открыванием, не используя действующее вторичное гидравлическое давление, для получения командного вторичного гидравлического давления. Он включает в себя фильтр 92a нижних частот, благодаря которому фильтруется целевое вторичное гидравлическое давление из преобразователя 90e вторичного гидравлического давления, вычислитель 92b отклонения для вычисления отклонения между действующим вторичным гидравлическим давлением и целевым вторичным гидравлическим давлением, установщик 92c нулевого отклонения для установки отклонения в ноль, переключатель 92d отклонений для избирательного переключения между рассчитанным отклонением и нулевым отклонением и определитель 92e интегрального коэффициента усиления для определения интегрального коэффициента усиления по температуре масла. Кроме того, он включает в себя умножитель 92f для перемножения интегрального коэффициента усиления из определителя 92e интегрального коэффициента усиления и отклонения с переключателя 92d отклонений, интегратор 92g для интегрирования величины интегрального управляющего воздействия FB из умножителя 92f, сумматор 92h для прибавления интегрированной величины интегрального управляющего воздействия FB к целевому вторичному гидравлическому давлению из преобразователя 90e вторичного гидравлического давления и ограничитель 92i для установки верхнего и нижнего пределов для суммированного значения, чтобы получать командное вторичное гидравлическое давление (указываемое ссылкой как базовое вторичное гидравлическое давление при управлении с проскальзыванием ремня). Кроме того, он включает в себя сумматор 92j колебаний для добавления команды синусоидальных колебаний в базовое вторичное гидравлическое давление при управлении с проскальзыванием ремня, корректор 92k гидравлического давления для коррекции колеблющегося базового вторичного гидравлического давления на величину коррекции вторичного гидравлического давления до командного вторичного гидравлического давления и преобразователь 92m гидравлического давления в ток для преобразования командного вторичного гидравлического давления в значение тока, подводимое к соленоиду для выдачи преобразованного командного значения тока на соленоид 75 вторичного гидравлического давления. Следует отметить, что переключатель 92d отклонений сконфигурирован для выбора рассчитанного отклонения, когда флажковый признак работы BSC имеет значение 0 (во время нормального управления), и выбора нулевого отклонения, когда флажковый признак работы BSC имеет значение 1 (во время управления с проскальзыванием ремня).
Регулятор 93 синусоидальных колебаний включает в себя генератор 93a синусоидальных колебаний для выбора частоты колебаний и амплитуды колебаний, пригодных для управления с проскальзыванием ремня и применения синусоидального колебания гидравлического давления в соответствии с выбранной частотой и амплитудой, установщик 93b нулевых колебаний для отсутствия применения синусоидального гидравлического давления и переключатель 93c колебаний для избирательного переключения между колебанием и нулевым колебанием гидравлического давления. Следует отметить, что переключатель 93c колебаний сконфигурирован для выбора нулевых колебаний, когда флажковый признак работы BSC имеет значение 0 (во время нормального управления), и выбора синусоидального колебания гидравлического давления, когда флажковый признак работы BSC имеет значение 1 (во время управления с проскальзыванием ремня).
Корректор 94 вторичного гидравлического давления включает в себя вычислитель 94a действующего передаточного отношения для расчета передаточного числа действующего передаточного отношения из отношения скорости Npri первичного вращения датчика 80 первичного вращения и скорости Nsec вторичного вращения датчика 81 вторичного вращения, первый полосовой фильтр 94b для извлечения колебательной составляющей из сигнала, представляющего действующее вторичное гидравлическое давление Psec, полученное датчиком 82 вторичного гидравлического давления, и второй полосовой фильтр 94c для извлечения колебательной составляющей из данных, рассчитанных вычислителем 94a действующего передаточного отношения. Он дополнительно включает в себя умножитель 94d для умножения колебательных составляющих, извлеченных обоими полосовыми фильтрами 94b, 94c, фильтр 94e нижних частот для извлечения информации о разности фаз из результата умножения, определитель 94f величины коррекции вторичного гидравлического давления для определения величины коррекции вторичного гидравлического давления на основе информации о разности фаз из фильтра 94e нижних частот, установщик 94g нулевой величины коррекции для установки величины коррекции вторичного гидравлического давления в ноль и переключатель 94h величины коррекции для избирательного переключения между величиной коррекции вторичного гидравлического давления и нулевой величиной коррекции. Следует отметить, что переключатель 94h величины коррекции сконфигурирован для выбора нулевых величин коррекции, когда флажковый признак работы BSC имеет значение 0 (во время нормального управления), и выбора величины коррекции вторичного гидравлического давления, когда флажковый признак работы BSC имеет значение 1 (во время управления с проскальзыванием ремня).
Фиг.5 представляет собой базовую блок-схему последовательности операций способа для процесса переключения между нормальным управлением и управлением с проскальзыванием ремня (= BSC) над вторичным гидравлическим давлением, выполняемого блоком управления 8 CVT согласно первому варианту осуществления. В последующем описаны соответственные этапы на фиг.5.
На этапе S1, вслед за запуском посредством включения ключа, решением об отсутствии разрешения BSC или процессом возврата нормального управления на этапе S5, механизм 4 бесступенчатой трансмиссии ременного типа управляется нормально, а затем последовательность операций переходит на этап S2. Во время нормального управления флажковый признак работы BSC установлен в ноль.
На этапе S2, вслед за нормальным управлением на этапе S1, выполняется определение касательно того, удовлетворены или нет все условия разрешения BSC. Если результатом является Да (удовлетворены все условия разрешения BSC), последовательность операций переходит на этап S3, и выполняется управление с проскальзыванием ремня (BSC). Если результатом является Нет (не удовлетворено какое-нибудь из условий разрешения BSC), последовательность операций возвращается на этап S1, и выполняется нормальное управление. Примером условий разрешения BSC являются следующие:
(1) Несущая способность передаваемого крутящего момента механизма 4 бесступенчатой трансмиссии ременного типа стабильна (мала скорость изменения несущей способности передаваемого крутящего момента).
Это условие (1), например, определяется по удовлетворению следующих двух условий.
a. |скорость изменения командного крутящего момента| < заданное значение
b. |скорость изменения командного передаточного отношения| < заданное значение
(2) Точность оценки входного крутящего момента на первичный шкив 42 находится в пределах надежного диапазона.
Это условие (2), например, определяется на основе информации о крутящем моменте (оцененном крутящем моменте двигателя) из блока 88 управления двигателем, состояния блокировки преобразователя 2 крутящего момента, рабочего состояния педали тормоза, положения в диапазоне и тому подобного.
(3) Разрешенные условия в вышеприведенных (1), (2) продолжаются в течение заданной продолжительности времени.
На этапе S2, определяется, удовлетворены или нет все вышеприведенные условия (1), (2), (3).
На этапе S3, вслед за определением разрешения BSC на этапе S2 или определением продолжения BSC на этапе S4, управление с проскальзыванием ремня (с фиг.6 по фиг.8) выполняется для уменьшения подводимой мощности на ремень 44 механизма 4 бесступенчатой трансмиссии ременного типа и поддерживания ремня 44 в надлежащем состоянии проскальзывания без пробуксовки. Затем последовательность операций переходит на этап S4. Во время управления с проскальзыванием ремня флажковый признак работы установлен в 1.
На этапе S4, вслед за управлением с проскальзыванием ремня на этапе S3, выполняется определение касательно того, удовлетворены или нет все из следующих условий продолжения BSC. Если результатом является Да (удовлетворены все условия продолжения BSC), последовательность операций возвращается на этап S3, и управление с проскальзыванием ремня (BSC) продолжается. Если результатом является Нет (не удовлетворено какое-нибудь из условий продолжения BSC), последовательность операций переходит на этап S5, и выполняется процесс возврата нормального управления. Примером условий продолжения BSC являются следующие:
(1) Несущая способность передаваемого крутящего момента механизма 4 бесступенчатой трансмиссии ременного типа стабильна (мала скорость изменения несущей способности передаваемого крутящего момента).
Это условие (1), например, определяется по удовлетворению следующих двух условий.
a. |скорость изменения командного крутящего момента| < заданное значение
b. |скорость изменения командного передаточного отношения| < заданное значение
(2) Точность оценки входного крутящего момента на первичный шкив 42 находится в пределах надежного диапазона.
Это условие (2), например, определяется на основе информации о крутящем моменте (оцененном крутящем моменте двигателя) из блока 88 управления двигателем, состояния блокировки преобразователя 2 крутящего момента, рабочего состояния педали тормоза, положения в диапазоне и тому подобного. Определяется, удовлетворены или нет оба вышеприведенных условия (1), (2). То есть отличие между условиями разрешения BSC и условиями продолжения BSC состоит в том, что условия продолжения BSC исключают условие (3) продолжения из условий разрешения BSC.
На этапе S5, вслед за определением, что не удовлетворено какое-нибудь из условий продолжения BSC, процесс возврата нормального управления (см. фиг.9-11) выполняется для предохранения ремня 44 от проскальзывания, когда управление с проскальзыванием ремня возвращается к нормальному управлению. По завершении процесса последовательность операций переходит на этап S1 и переводится на нормальное управление.
Фиг.6 является блок-схемой последовательности операций способа для полного процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления. Фиг.7 представляет собой блок-схему последовательности операций способа для процесса ограничения крутящего момента из процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления. Фиг.8 является блок-схемой последовательности операций способа для процесса колебания и коррекции вторичного гидравлического давления из процесса управления с проскальзыванием ремня, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления.
Прежде всего, как очевидно из фиг.6, во время управления с проскальзыванием ремня, при котором продолжаются определение разрешения BSC и определение продолжения BSC, одновременно выполняются процесс (этап S31) запрета регулирования с обратной связью, в котором командное вторичное гидравлическое давление получается с использованием действующего вторичного гидравлического давления, процесс (этап S32) ограничения крутящего момента в качестве подготовки для возврата к нормальному управлению и процесс (этап S33) колебания и коррекции вторичного гидравлического давления для управления с проскальзыванием ремня.
На этапе S31, во время управления с проскальзыванием ремня, при котором продолжаются определение разрешения BSC и определение продолжения BSC, регулирование с обратной связью, при котором командное вторичное гидравлическое давление получается с использованием действующего вторичного гидравлического давления, детектированного датчиком 82 вторичного гидравлического давления, запрещается. То есть для получения командного вторичного гидравлического давления регулирование с обратной связью во время нормального управления запрещается и переключается на регулирование с разомкнутым контуром управления с проскальзыванием ремня, использующего нулевое отклонение. Затем, когда управление с проскальзыванием ремня переводится на нормальное управление, регулирование с обратной связью возвращается вновь.
На этапе S32, во время управления с проскальзыванием ремня, при котором продолжаются определение разрешения BSC и определение продолжения BSC, выполняется процесс ограничения крутящего момента на фиг.7. На этапе S321 блок-схемы последовательности операций способа на фиг.7 «требование ограничения крутящего момента из управления с проскальзыванием ремня» определено, чтобы быть крутящим моментом по требованию водителя.
На этапе S33, во время управления с проскальзыванием ремня, при котором продолжаются определение разрешения BSC и определение продолжения BSC, вторичное гидравлическое давление колеблется и корректируется по фиг.8. В последующем, описаны этапы блок-схемы последовательности операций способа на фиг.8.
На этапе S331 колеблется командное вторичное гидравлическое давление. То есть синусоидальное гидравлическое давление с заданной амплитудой и заданной частотой накладывается на командное вторичное гидравлическое давление. Последовательность операций переходит на этап S332.
На этапе S332, вслед за колебанием командного вторичного гидравлического давления на этапе S331, действующее вторичное гидравлическое давление детектируется датчиком 82 вторичного гидравлического давления, чтобы выявлять действующее передаточное отношение посредством расчета на основании информации о скоростях вращения с датчика 80 первичного вращения и датчика 81 вторичного вращения. Последовательность операций переходит на этап S333.
На этапе S333, вслед за детектированием действующего вторичного гидравлического давления и действующего передаточного отношения на этапе S332, каждое из действующего вторичного гидравлического давления и передаточного отношения подвергается обработке полосовым фильтром для извлечения их соответственных колебательных составляющих (синусоид) и их перемножения. Затем перемноженное значение подвергается обработке фильтром нижних частот и преобразуется в значение, выраженное амплитудой и разностью θ фаз (косинусоидой) между колебанием действующего вторичного гидравлического давления и у действующего передаточного отношения. Последовательность операций переходит на этап S334. Здесь, в тех случаях, когда A - амплитуда действующего вторичного гидравлического давления, а B - амплитуда колебаний действующего передаточного отношения, колебание действующего гидравлического давления выражается формулой (1): Asinωt. Колебание действующего передаточного отношения выражается формулой (2): Bsin (ωt+θ). Формулы (1) и (2) перемножаются и с использованием следующей формулы (3) суммы произведений:
sinαsinβ=-1/2{cos(α+β)-cos(α-β)}
получается следующая формула (4):
Asinωt×Bsin(ωt+θ)=(1/2)ABcosθ-(1/2)ABcos(2ωt+θ).
В формуле (4), (1/2)ABcos(2ωt+θω), так как удвоенная составляющая частоты колебаний уменьшается благодаря фильтру нижних частот, так что формула (4) становится следующей формулой (5):
Asinωt×Bsin(ωt+θ)≈(1/2)ABcosθ.
Таким образом, она может быть выражена формулой разности θ фаз в колебании между действующим вторичным гидравлическим давлением и действующим передаточным отношением.
На этапе S334, вслед за расчетом разности θ фаз в колебаниях передаточных отношений, выполняется определение касательно того, является или нет разность θ фаз такой, что 0≤ разность θ фаз < заданное значение в 1 (диапазон микропроскальзывания). Если результатом является Да (0≤ разность θ фаз < заданное значение в 1), последовательность операций переходит на этап S335, тогда как если результатом является Нет (заданное значение в 1≤ разность θ фаз), последовательность операций переходит на этап S336.
На этапе S335, вслед за определением касательно того, что 0≤ разность θ фаз < заданное значение в 1 (диапазон микропроскальзывания), на этапе S334, величина коррекции вторичного гидравлического давления устанавливается в -∆Psec. Последовательность операций переходит на этап S339.
На этапе S336, вслед за определением, что заданное значение в 1≤ разности θ фаз, на этапе S334, выполняется определение касательно того, является или нет разность θ фаз такой, что заданное значение в 1≤ разность θ фаз < заданное значение в 2 (диапазон целевого проскальзывания). Если результатом является Да (заданное значение в 1≤ разность θ фаз < заданное значение в 2), последовательность операций переходит на этап S337, тогда как если результатом является Нет (заданное значение в 2≤ разность θ фаз), последовательность операций переходит на этап S338.
На этапе S337, вслед за определением, что заданное значение в 1≤ разность θ фаз < заданное значение в 2 (диапазоне целевого проскальзывания), на этапе S336, величина коррекции вторичного гидравлического давления устанавливается в ноль, и последовательность операций переходит на этап S339.
На этапе S338, вслед за определением касательно того, что заданное значение в 2≤ разность θ фаз (диапазона перехода к микро/макропроскальзыванию), на этапе S336, величина коррекции вторичного гидравлического давления устанавливается в +∆Psec, и последовательность операций переходит на этап S339.
На этапе S339, вслед за установкой величин коррекции вторичного гидравлического давления на этапах S335, S337, S338, командное вторичное гидравлическое давление устанавливается в значение базового вторичного гидравлического давления + величина коррекции вторичного гидравлического давления. Затем последовательность операций заканчивается.
Фиг.9 является блок-схемой последовательности операций способа для процесса возврата от управления с проскальзыванием ремня к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления. Фиг.10 представляет собой блок-схему последовательности операций способа для процесса ограничения крутящего момента из процесса возврата к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления. Фиг.11 является блок-схемой последовательности операций способа для процесса ограничения передачи из процесса возврата к нормальному управлению, выполняемого блоком 8 управления CVT, согласно первому варианту осуществления.
Прежде всего, как очевидно из фиг.9, в то время как нормальное управление возвращается из управления с проскальзыванием ремня, начиная с завершения продолжения BSC, чтобы начать нормальное управление, одновременно выполняются процесс (этап S51) возврата регулирования с обратной связью, в котором командное вторичное гидравлическое давление получается с использованием действующего вторичного гидравлического давления, процесс (этап S52) ограничения крутящего момента в качестве подготовки для возврата к нормальному управлению, процесс (этап S53) переустановки колебания и коррекции вторичного гидравлического давления для управления с проскальзыванием ремня и процесс (этап S54) ограничения передачи, в котором ограничивается скорость передачи.
На этапе S51, в то время как нормальное управление возвращается из управления с проскальзыванием ремня, начиная с завершения продолжения BSC, чтобы начать нормальное управление, возвращается регулирование с обратной связью, при котором командное вторичное гидравлическое давление получается с использованием действующего вторичного гидравлического давления, детектированного датчиком 82 вторичного гидравлического давления.
На этапе S52, в то время как нормальное управление возвращается из управления с проскальзыванием ремня, от завершения продолжения BSC до начала нормального управления, выполняется процесс ограничения крутящего момента в качестве подготовки для возврата к нормальному управлению на фиг.10.
На этапе S53, в то время как нормальное управление возвращается из управления с проскальзыванием ремня, начиная с завершения продолжения BSC, чтобы начать нормальное управление, колебание и коррекция вторичного гидравлического давления на фиг.8 переустанавливаются для ожидания нормального управления.
На этапе S54, в то время как нормальное управление возвращается из управления с проскальзыванием ремня, начиная с завершения продолжения BSC, чтобы начать нормальное управление, выполняется процесс ограничения передачи, в котором скорость передачи ограничивается по фиг.11.
В последующем описаны этапы блок-схемы последовательности операций способа, показывающей процесс ограничения крутящего момента, на фиг.10. Ключевой момент этого процесса ограничения крутящего момента состоит в том, чтобы переключать управления на основе количественного соотношения между тремя значениями крутящего момента по требованию водителя, требованию ограничения крутящего момента из BSC и несущей способностью по крутящему моменту (рассчитанной несущей способностью по крутящему моменту). В материалах настоящей заявки крутящий момент по требованию водителя указывает ссылкой на крутящий момент двигателя, требуемый водителем, требование ограничения крутящего момента из BSC указывает ссылкой на величину ограничения крутящего момента, показанную в фазах (2), (3) на фиг.15. Несущая способность по крутящему моменту обычно является допустимой проектной несущей способностью по крутящему моменту и установлена в значение, более высокое, чем крутящий момент по требованию водителя, на запас регулирования с принятыми во внимание механическими отклонениями механизма 4 бесступенчатой трансмиссии ременного типа, с целью предотвращения проскальзывания ремня. Здесь, действующая несущая способность по крутящему моменту контролируется при регулировании вторичного гидравлического давления. Кроме того, рассчитанная несущая способность по крутящему моменту указывает ссылкой на несущую способность по крутящему моменту во время процесса возврата (фазы (3) на фиг.15) BSC (фазы (2) на фиг.15). Рассчитанная несущая способность по крутящему моменту, более точно, является значением, основанным на или рассчитанным из действующего вторичного гидравлического давления и действующего передаточного отношения (рассчитанной несущей способности по крутящему моменту одного из двух шкивов 42, 43, к которым подводится крутящий момент двигателя, то есть первичного шкива 42).
На этапе S521 выполняется определение касательно того, является или нет крутящий момент по требованию водителя большим, чем требование ограничения крутящего момента из BSC. Если результатом является Да, последовательность операций переходит на этап S522, тогда как, если результатом является Нет, последовательность операций переходит на этап S525.
На этапе S522, вслед за определением, что крутящий момент по требованию водителя больше, чем требование ограничения крутящего момента из BSC, на этапе S521, делается определение касательно того, является или нет рассчитанная несущая способность по крутящему моменту большей, чем требование ограничения крутящего момента из BSC. Если результатом является Да, последовательность операций переходит на этап S523, тогда как, если результатом является Нет, последовательность операций переходит на этап S524.
На этапе S523, вслед за определением, что расчетная несущая способность по крутящему моменту > требования предельного значения крутящего момента из BSC, на этапе S522, требование предельного значения крутящего момента из BSC устанавливается в меньшее требования предельного значения крутящего момента из BSC (предыдущее значение) +∆T и расчетной допустимой несущей способности по крутящему моменту. Последовательность операций переходит на Возврат.
На этапе S524, вслед за определением, что рассчитанная несущая способность по крутящему моменту ≤ требования ограничения крутящего момента из BSC, на этапе S522, требование ограничения крутящего момента из BSC устанавливается в меньшее из требования ограничения крутящего момента из BSC (предыдущего значения) и крутящего момента по требованию водителя. Последовательность операций переходит на Возврат.
На этапе S525, вслед за определением, что крутящий момент по требованию водителя ≤ требования ограничения крутящего момента из BSC, на этапе S521, делается определение касательно того, является или нет рассчитанная несущая способность по крутящему моменту большей, чем требование ограничения крутящего момента из BSC. Если результатом является Да, последовательность операций переходит на этап S527, тогда как, если результатом является Нет, последовательность операций переходит на этап S528.
На этапе S526, вслед за определением, что рассчитанная несущая способность по крутящему моменту ≤ требования ограничения крутящего момента из BSC, на этапе S525, требование ограничения крутящего момента из BSC устанавливается в меньшее из требования ограничения крутящего момента из BSC (предыдущего значения) и крутящего момента по требованию водителя. Последовательность операций переходит на Возврат.
На этапе S527, вслед за определением, что рассчитанная несущая способность по крутящему моменту > требования ограничения крутящего момента из BSC, на этапе S525, требование ограничения крутящего момента из BSC отменяется. Последовательность операций заканчивается.
В последующем описаны этапы блок-схемы последовательности операций способа, показывающей процесс ограничения передачи посредством ограничения целевой скорости первичного вращения, на фиг.11.
На этапе S541, рассчитывается целевой крутящий момент инерции. Последовательность операций переходит на этап S542.
На этапе S542, вслед за расчетом целевого крутящего момента инерции на этапе S541, целевая скорость изменения первичного вращения рассчитывается из целевого крутящего момента инерции. Затем последовательность операций переходит на этап S543.
На этапе S543, вслед за расчетом целевой скорости изменения первичного вращения на этапе S542, рассчитывается ограниченная целевая скорость первичного вращения, не превышающая целевую скорость изменения первичного вращения, и последовательность операций переходит на этап S544.
На этапе S544, вслед за расчетом ограниченной целевой скорости изменения первичного вращения на этапе S543, управление передачей выполняется на основе ограниченной целевой скорости первичного вращения, и последовательность операций переходит на этап S545.
На этапе S545, вслед за управлением передачей на этапе S544, выполняется определение касательно того, завершено или нет управление передачей на основании ограниченной целевой скорости первичного вращения, или достигла ли действующая скорость первичного вращения ограниченной целевой скорости первичного вращения. Если результатом является Да (завершение управления передачей), последовательность операций заканчивается, тогда как если результатом является Нет (в середине управления передачей), последовательность операций возвращается на этап S541.
Теперь будет описана работа устройства и способа управления для механизма 4 бесступенчатой трансмиссии ременного типа согласно первому варианту осуществления. Она будет поделена на четыре части, операции определения разрешения и продолжения BSC, операции определения разрешения и продолжения BSC на основании |скорость изменения командной передачи| < заданное значение, операция управления с проскальзыванием ремня (работа BSC) и операция управления возвратом от BSC к нормальному управлению.
Операции определения разрешения и продолжения BSC
В начале движения транспортного средства действие переходит на этап S2 с этапа S1 на блок-схеме последовательности операций способа по фиг.5. До тех пор пока не удовлетворены все условия определения разрешения BSC на этапе S2, последовательность операций с этапа S1 по этап S2 повторяется для продолжения нормального управления. То есть удовлетворение всех условий определения разрешения BSC на этапе S2 определено, чтобы быть условием начала управления BSC.
Условия разрешения BSC в первом варианте осуществления являются следующими:
(1) Несущая способность передаваемого крутящего момента механизма 4 бесступенчатой трансмиссии ременного типа стабильна (мала скорость изменения несущей способности передаваемого крутящего момента). Это условие (1), например, определяется по удовлетворению следующих двух условий.
a. |скорость изменения командного крутящего момента| < заданное значение
b. |скорость изменения командного передаточного отношения| < заданное значение
(2) Точность оценки входного крутящего момента на первичный шкив 42 находится в пределах надежного диапазона.
Это условие (2), например, определяется на основе информации о крутящем моменте (оцененном крутящем моменте двигателя) из блока 88 управления двигателем, состояния блокировки преобразователя 2 крутящего момента, рабочего состояния педали тормоза, положения в диапазоне и тому подобного.
(3) Разрешенные условия в вышеприведенных (1), (2) продолжаются в течение заданной продолжительности времени.
На этапе S2, определяется, удовлетворены или нет все вышеприведенные условия (1), (2), (3).
Таким образом, управлению с проскальзыванием ремня разрешено начинаться, если несущая способность по крутящему моменту передачи механизма 4 бесступенчатой трансмиссии ременного типа должна быть стабильной, и точность оценки входного крутящего момента на первичный шкив 42 непрерывно находится в пределах надежного диапазона в течение заданной продолжительности времени во время нормального управления.
Как приведено выше, управлению с проскальзыванием ремня разрешено начинаться при удовлетворении всех условий разрешения BSC, так что он способен начинать управление с проскальзыванием ремня в предпочтительном диапазоне с гарантированной высокой точностью управления.
После того как разрешение BSC определено на этапе S2, на этапе S3 управление с проскальзыванием ремня выполняется для уменьшения подводимой мощности на ремень 44 механизма 4 бесступенчатой трансмиссии ременного типа и поддерживания ремня 44 в надлежащем состоянии проскальзывания без пробуксовки. Затем, на этапе S4, вслед за управлением с проскальзыванием ремня на этапе S3, выполняется определение касательно того, удовлетворены или нет все из условий продолжения BSC. До тех пор пока удовлетворяются все условия продолжения BSC, последовательность операций с этапа S3 по этап S4 повторяется для продолжения управления с проскальзыванием ремня (BSC).
Здесь, условия продолжения BSC в первом варианте осуществления являются условиями (1), (2) разрешения BSC и исключают условие продолжения в течение заданной продолжительности времени (3) из условий разрешения BSC. Вследствие этого, можно предотвращать продолжение управления с проскальзыванием ремня с негарантированной точностью управления, поскольку управление с проскальзыванием ремня немедленно останавливается и возвращается к нормальному управлению, если одно из условий (1), (2) не удовлетворено во время управления с проскальзыванием ремня.
Операции определения разрешения и продолжения BSC на основании |скорость изменения командного крутящего момента| < заданное значение
Определение разрешения управления с проскальзыванием ремня согласно первому варианту осуществления сконфигурировано для разрешения управления с проскальзыванием ремня при условиях, включающих в себя, что скорость изменения командного крутящего момента, указывающая скорость изменения крутящего момента, подаваемую на механизм 4 бесступенчатой трансмиссии ременного типа, является меньшей, чем заданное значение.
Другими словами, рассматривается время, когда скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа (= скорость изменения входного крутящего момента), мала, как проиллюстрировано сплошной линией на фиг.12, и время, когда скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа, велика. В то время как скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа, мала, колебательная составляющая, обусловленная колебанием, остается на характеристике действующего вторичного гидравлического давления, как показано сплошной линией на фиг.13, и отклонение действующего гидравлического давления, обусловленное изменением входного крутящего момента, и колебательной составляющей, обусловленной колебанием, могут разделяться. То есть высока точность состояния проскальзывания ремня, оцененного по контролируемой разности фаз с использованием колебательной составляющей, обусловленной колебанием, включенным в характеристику действующего вторичного гидравлического давления.
Между тем, в то время как скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа, велика, колебательная составляющая, обусловленная колебанием, включенным в действующее вторичное гидравлическое давление, пропадает, как показано в зоне C пунктирной линии на фиг.13, так что отклонение действующего вторичного гидравлического давления, обусловленное изменением входного крутящего момента, и колебательной составляющей, обусловленной колебанием, разделяться не могут. То есть низка точность состояния проскальзывания ремня, оцененного по контролируемой разности фаз с использованием колебательной составляющей, обусловленной колебанием, включенным в характеристику действующего вторичного гидравлического давления.
В противоположность, согласно первому варианту осуществления, при |скорость изменения командного крутящего момента| < заданное значение и при высокой точности оценки состояния проскальзывания ремня, управление с проскальзыванием ремня разрешается. Это имеет следствием снижение трения ремня, благодаря снижению вторичного гидравлического давления и уменьшению приводной нагрузки на механизм трансмиссии посредством снижения вторичного гидравлического давления. Как результат, может улучшаться практическая топливная экономичность двигателя 1.
Между тем, при |скорость изменения командного крутящего момента| ≥ заданное значение и при низкой точности оценки состояния проскальзывания ремня, управление с проскальзыванием ремня не разрешается. Это предохраняет ремень от сильного проскальзывания во время управления с проскальзыванием ремня, которое возникает, когда управление с проскальзыванием ремня разрешено без удовлетворенного условия по скорости передачи. То есть во время управления с проскальзыванием ремня усилие зажима ремня уменьшается вследствие снижения вторичного гидравлического давления. Ремень с низким усилием зажима может подвергаться сильному проскальзыванию с возрастанием входного крутящего момента у механизма трансмиссии.
Затем, касательно условия разрешения BSC, что |скорость изменения командного крутящего момента| < заданного значения, заданное значение, которое является порогом для определения величины скорости изменения командного крутящего момента, устанавливается в скорость изменения входного крутящего момента, которая определяется в качестве ограничения для предоставления возможности выделения колебательной составляющей, включенной в действующее вторичное гидравлическое давление, а также в передаточном числе действующего передаточного отношения, и гарантирования точности оценки состояния проскальзывания ремня на основании выделенных колебательных составляющих. То есть в регуляторе 93 синусоидальных колебаний на фиг.4 система управления с проскальзыванием ремня сконфигурирована для наложения синусоидального гидравлического давления на командное вторичное гидравлическое давление для колебания и оценки состояния проскальзывания ремня по колебательной составляющей, включенной в действующее вторичное гидравлическое давление вследствие колебания, и оценки в действующем передаточном числе передаточного отношения. Вследствие этого, необходимым условием для осуществления управления с проскальзыванием ремня является то, что колебательная составляющая, включенная в действующее вторичное гидравлическое давление, и составляющая в передаточном числе действующего передаточного отношения ограничены, чтобы гарантировать точность оценки состояния проскальзывания ремня на основе выделенных колебательных составляющих. Другими словами, заданное значение устанавливается для скорости изменения входного крутящего момента, которое определено в качестве ограничения для предоставления возможности извлечения колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и составляющей в передаточном числе действующего передаточного отношения, и обеспечения точности оценки состояния проскальзывания ремня на основании извлеченных колебательных составляющих, постепенным увеличением скорости изменения крутящего момента, подаваемой на механизм 4 бесступенчатой трансмиссии во время управления с проскальзыванием ремня. Соответственно, посредством предоставления скорости изменения входного крутящего момента возможности находиться в предельном диапазоне, в котором выделяются колебательные составляющие, включенные в действующее вторичное гидравлическое давление и передаточное число действующего передаточного отношения, обеспечивается возможность расширять диапазон скорости изменения входного крутящего момента, при которой разрешено управление с проскальзыванием ремня наряду с тем, что гарантируется точность оценки состояния проскальзывания ремня.
Согласно первому варианту осуществления управление с проскальзыванием ремня разрешено, когда скорость изменения командного крутящего момента ниже, чем заданное значение. Другими словами, разрешение управления с проскальзыванием ремня определяется не по скорости изменения крутящего изменения, в действительности подаваемого на механизм 4 бесступенчатой трансмиссии ременного типа, но по целевому входному крутящему моменту, определенному посредством расчета. Разрешения для запуска и продолжения управления с проскальзыванием ремня определяются в момент времени, когда скорость изменения командного крутящего момента рассчитывается по текущему входному крутящему моменту и целевому входному крутящему моменту. Соответственно, оно способно определять разрешения для запуска и продолжения управления с проскальзыванием ремня на основе оцененной информации, такой как скорость изменения командного крутящего момента, до того, как скорость изменения крутящего момента, поданная на механизм 4 бесступенчатой трансмиссии ременного типа, изменяется в действительности.
Операция управления с проскальзыванием ремня (работа BSC)
В начале управления с проскальзыванием ремня вторичное гидравлическое давление установлено в значение для получения усилия зажима, чтобы не вызывать пробуксовку ремня с оцененным запасом, так что удовлетворено условие, что разность θ фаз ниже, чем заданное значение 1. На блок-схеме последовательности операций способа по фиг.8 повторяется последовательность операций с этапа S331 → этап S332 → этап S333 → этап S334 → этап S335 до этапа S339, и каждый раз, когда повторяется последовательность операций, командное вторичное гидравлическое давление уменьшается в ответ на коррекцию на -∆Psec. Затем, до тех пор пока разность θ фаз в 1 или более не достигает заданного значения в 2, последовательность операций переходит с этапа S331 → этап S332 → этап S333 → этап S334 → этап S336 → этап S337 на этап S339 на фиг.8 для поддержания командного вторичного гидравлического давления. При разности θ фаз, являющейся заданным значением в 2 или более, последовательность операций переходит с этапа S331 → этап S332 → этап S333 → этап S334 → этап S336 → этап S338 на этап S339 для увеличения командного вторичного гидравлического давления в ответ на коррекцию на +∆Psec. При управлении с проскальзыванием ремня скорость проскальзывания поддерживается, так что разность θ фаз подпадает под диапазон заданных значений от 1 или более до меньших чем 2.
Управление с проскальзыванием ремня описано со ссылкой на временную диаграмму на фиг.14. В момент t1 времени вышеприведенные условия (1), (2) разрешения BSC удовлетворяются и продолжаются (условие (3) разрешения BSC). С момента t2 времени до момента t3 времени, по меньшей мере, одно из вышеприведенных условий (1), (2) продолжения BSC становится неудовлетворенным, а флажковый признак работы BSC и флажковый признак запрета F/B давления SEC (флажковый признак запрета обратной связи по вторичному давлению) установлены для управления с проскальзыванием ремня. Немного до момента t3 времени нажимается акселератор, так что, по меньшей мере, одно из условий продолжения BSC становится неудовлетворенным, и управление для возврата к нормальному управлению выполняется с момента t3 времени до момента t4 времени. После момента t4 времени выполняется нормальное управление.
Таким образом, как очевидно из характеристики открывания акселератора, характеристики скорости транспортного средства, характеристики крутящего момента двигателя, а также характеристики величины коррекции тока соленоида у соленоида 75 вторичного гидравлического давления во время определения равномерного хода, указанного стрелкой E на фиг.14, при управлении с проскальзыванием ремня, разность θ фаз между колебательными составляющими вторичного гидравлического давления, обусловленными колебанием, и передаточным числом, контролируется для увеличения или уменьшения значения тока. Следует отметить, что соленоид 75 вторичного гидравлического давления нормально открыт (всегда открыт) и уменьшает вторичное гидравлическое давление наряду с подъемом значения тока.
Действующее передаточное отношение поддерживается, чтобы быть практически постоянным посредством управления с проскальзыванием ремня, хотя оно колеблется с малой амплитудой, как показано на характеристике действующего передаточного отношения (Передаточного числа) на фиг.14. Разность θ фаз, как показано на характеристиках разности фаз колебания давления SEC и колебания передаточного числа на фиг.14, постепенно увеличивается со временем от момента t2 времени, когда скорость проскальзывания является приблизительно нулевой, и достигает целевого значения (целевой скорости проскальзывания). Вторичное гидравлическое давление, как показано на характеристике гидравлического давления SEC на фиг.14, уменьшается со временем с момента t2 времени, когда обеспечен запас, как указано стрелкой F, и в конце достигает значения заданного минимального давления, добавленного амплитудой гидравлического давления, которое находится на уровне гидравлического давления с запасом регулирования до действующего минимального давления. В то время как управление с проскальзыванием ремня продолжается в течение длительного времени, действующее вторичное гидравлическое давление поддерживается в диапазоне амплитуд заданного минимального давления плюс амплитуда гидравлического давления для поддержания целевого значения разности θ фаз (скорости проскальзывания).
Таким образом, уменьшение вторичного гидравлического давления посредством управления с проскальзыванием ремня имеет следствием снижение трения ремня, действующего на ремень 44, и снижение приводной нагрузки на механизм 4 бесступенчатой трансмиссии ременного типа посредством снижения трения ремня. Как результат, можно улучшать практическую топливную экономичность двигателя 1 без оказания влияния на эксплуатационные качества передвижения во время управления с проскальзыванием ремня на основании определения разрешения BSC.
Операция управления возвратом от BSC к нормальному управлению
Во время управления с проскальзыванием ремня наряду с тем, что продолжаются определения разрешения и продолжения BSC, процесс ограничения крутящего момента на этапе S32 по фиг.6 выполняется установкой требования ограничения крутящего момента из управления с проскальзыванием ремня в качестве крутящего момента по требованию водителя на этапе S321 на фиг.7. В последующем операция ограничения крутящего момента для возврата к нормальному управлению описана со ссылкой на фиг.10 и 15.
Блок 88 управления двигателем имеет предельную величину крутящего момента в качестве крутящего момента двигателя верхнего предела управления и управляет действующим крутящим моментом двигателя 1, чтобы не превышал предельную величину крутящего момента. Эта предельная величина крутящего момента определяется согласно различным требованиям. Например, входной крутящий момент верхнего предельного значения у механизма 4 бесступенчатой трансмиссии ременного типа устанавливается в требование ограничения крутящего момента во время нормального управления (фазы (1) на фиг.15), и блок 8 управления CVT отправляет требование ограничения крутящего момента во время нормального управления в блок 88 управления двигателем. Блок 88 управления двигателем выбирает минимальное из требований ограничения крутящего момента из различных регуляторов в качестве предельной величины крутящего момента.
Более точно, в момент t5 времени фаза (1) нормального управления переводится на управление с проскальзыванием ремня, и требование ограничения крутящего момента из BSC отправляется в блок 88 управления двигателем в фазе (2), как показано на характеристике предельной величины крутящего момента на фиг.15. Однако требование ограничения крутящего момента из BSC во время BSC (фазы (2) на фиг.15) предназначено для заблаговременной подготовки к ограничению крутящего момента на фиг.10 и практически не функционирует в качестве ограничения крутящего момента во время BSC (фазы (2) на фиг.15).
Затем, в момент t6 времени продолжение BSC прекращается и переводится на управление для возврата к нормальному управлению. В момент t6 времени требование ограничения крутящего момента выдается вследствие того, что крутящий момент по требованию водителя > требования ограничения крутящего момента из BSC, и рассчитанная несущая способность по крутящему моменту ≤ требования ограничения крутящего момента из BSC. Поэтому последовательность операций с этапа S521 → этап S522 → этап S524 до Возврата на блок-схеме последовательности операций способа на фиг.10 повторяется для поддержания требования ограничения крутящего момента из BSC (предыдущего значения) на этапе S524.
После этого, в момент t7 времени, крутящий момент по требованию водителя > требования ограничения крутящего момента из BSC, и рассчитанная несущая способность по крутящему моменту > требования ограничения крутящего момента из BSC. Последовательность операций с этапа S521 → этап S522 → этап S523 до Возврата повторяется для постепенного увеличения требования ограничения крутящего момента из BSC, чтобы было (предыдущим значением + ∆T). Наряду с этим градиентом роста, постепенно нарастает действующий крутящий момент.
Вследствие нарастания требования ограничения крутящего момента из BSC начиная с момента t7 времени, в момент t8 времени крутящий момент по требованию водителя ≤ требования ограничения крутящего момента из BSC, и рассчитанная несущая способность по крутящему моменту > требования ограничения крутящего момента из BSC. Последовательность операций переходит с этапа S521 → этап S525 → этап S527 на Конец в блок-схеме последовательности операций способа на фиг.10. На этапе S527 предельное значение крутящего момента из BSC отменяется.
В этом примере последовательность операций пропускает этап S526, который выполняется, когда акселератор управляется в качестве нажатого или возвращенного (отпущенного) в течение короткого промежутка времени. Более точно, этап S526 пропускается, когда управление с проскальзыванием ремня отменяется нажатием на акселератор, и акселератор отпускается, как только начинается управление возвратом.
Благодаря управлению ограничением крутящего момента для ограничения скорости изменения входного крутящего момента у механизма 4 бесступенчатой трансмиссии ременного типа при возврате от управления с проскальзыванием ремня к нормальному управлению, можно предохранять входной крутящий момент у механизма 4 бесступенчатой трансмиссии ременного типа от становления чрезмерно большим относительно усилия зажима ремня и предохранять ремень 44 от проскальзывания.
Кроме того, при управлении для возврата к нормальному управлению от управления с проскальзыванием ремня, если передаточное отношение механизма 4 бесступенчатой трансмиссии ременного типа изменяется с обычной скоростью передачи наряду с тем, что скорость изменения входного крутящего момента уменьшается под вышеприведенным управлением с проскальзыванием ремня, заметно происходит снижение входного крутящего момента, обусловленное изменением инерции вращения. Это может заставлять водителя ощущать излишнее замедление (толчок тяги). Ввиду этого скорость изменения передаточного отношения ограничивается наряду с ограничением скорости изменения входного крутящего момента у механизма 4 бесступенчатой трансмиссии ременного типа.
То есть по прекращении продолжения BSC и переводе на управление для возврата к нормальному управлению, последовательность операций от этапа S541 → этап S542 → этап S543 → этап S544 до этапа S545 в блок-схеме последовательности операций способа на фиг.11 повторяется до завершения передачи, чтобы управлять передачей на основе ограниченной скорости целевого первичного вращения.
Таким образом, ограничение скорости изменения первичного вращения, а именно снижение скорости передачи, позволяет уменьшать изменение инерции вращения и предотвращать снижение входного крутящего момента у механизма трансмиссии. Как результат, можно предохранять водителя от ощущения излишнего замедления (толчка тяги).
Затем, в последующем описаны результаты устройства и способа управления для механизма 4 бесступенчатой трансмиссии ременного типа согласно первому варианту осуществления.
(1) Устройство управления для механизма 4 бесступенчатой трансмиссии ременного типа, включающего в себя первичный шкив 42 для приема подводимой мощности от источника привода (двигателя 1), вторичный шкив 43 для выдачи отдаваемой мощности на ведущие колеса 6, 6, и ремень 44, обмотанный вокруг первичного шкива 42 и вторичного шкива 43, для регулирования передаточного отношения, определенного отношением диаметров движения ремня 44 на шкивах, регулированием первичного гидравлического давления на первичный шкив 42 и вторичного гидравлического давления на вторичный шкив 43, устройство управления дополнительно содержит средство (этап S3) управления с проскальзыванием ремня, сконфигурированное для колебания вторичного гидравлического давления и контроля разности фаз между колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение, чтобы оценивать состояние проскальзывания ремня, и регулировать действующее вторичное гидравлическое давление для уменьшения на основе оценки, чтобы обеспечивать заданное состояние проскальзывания ремня, и средство (этап S2) определения разрешения управления с проскальзыванием ремня, сконфигурированное для разрешения средству управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа, является меньшей, чем заданное значение, при котором отклонение в действующем вторичном гидравлическом давлении и колебательная составляющая, обусловленная колебанием, включенным в действующее вторичное гидравлическое давление, могут быть разделены. Таким образом, оно способно предоставить устройство управления для механизма 4 бесступенчатой трансмиссии ременного типа, которое может уменьшать энергопотребление привода посредством уменьшения трения ремня, когда точность оценки состояния проскальзывания ремня высока, и может предохранять ремень 44 от сильного проскальзывания во время управления с проскальзыванием ремня, когда точность оценки состояния проскальзывания ремня низка.
2) Средство (этап 2) определения разрешения управления с проскальзыванием ремня устанавливает заданное значение скорости изменения входного крутящего момента в скорость изменения входного крутящего момента, которая определена в качестве ограничения, чтобы предоставлять возможность выделения колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и составляющей в передаточном числе действующего передаточного отношения, и обеспечения точности оценки состояния проскальзывания ремня на основании выделенных колебательных составляющих. Таким образом, можно увеличивать частоту и время продолжения управления для управления с проскальзыванием ремня во время движения посредством максимального расширения диапазона условий передачи для управления с проскальзыванием ремня относительно скорости изменения входного крутящего момента с гарантированной точностью оценки управления с проскальзыванием ремня.
(3) Средство (этап S2) определения разрешения управления с проскальзыванием ремня сконфигурировано для разрешения средству (этапу S3) управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня, когда скорость изменения командного крутящего момента является меньшей, чем заданное значение. Таким образом, оно способно определять разрешение для запуска управления с проскальзыванием ремня на основе оцененной информации, такой как скорость изменения командного крутящего момента, до того как скорость изменения крутящего момента, поданная на механизм 4 бесступенчатой трансмиссии ременного типа, изменяется в действительности.
(4) Способ управления для механизмами 4 бесступенчатой трансмиссии ременного типа посредством управления с проскальзыванием ремня, в котором состояние проскальзывания ремня между первичным шкивом 42, вторичным шкивом 43 и ремнем 44 регулируется гидравлическим давлением, способ содержит этапы колебания гидравлического давления для регулирования гидравлического давления на основе перемноженного значения колебательной составляющей, включенной в действующее гидравлическое давление, и колебательной составляющей действующего передаточного отношения, и разрешения управления с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемая на механизм 4 бесступенчатой трансмиссии ременного типа, является меньшей, чем заданное значение, при котором колебательная составляющая, обусловленная колебанием, включенным в действующее гидравлическое давление, может быть отделена от отклонения действующего гидравлического давления. Таким образом, он способен предоставить способ управления для механизма 4 бесступенчатой трансмиссии ременного типа, который может уменьшать энергопотребление привода посредством уменьшения трения ремня, когда точность оценки состояния проскальзывания ремня высока, и может предохранять ремень 44 от сильного проскальзывания во время управления с проскальзыванием ремня, когда точность оценки состояния проскальзывания ремня низка.
(5) При управлении с проскальзыванием ремня состояние проскальзывания ремня оценивается посредством контроля разности фаз, рассчитанной из перемноженного значения, для регулирования гидравлического давления на основе оценки, чтобы поддерживать заданное состояние проскальзывания ремня. Таким образом, можно стабильно поддерживать заданное состояние проскальзывания ремня во время управления с проскальзыванием ремня, точно узнавая изменение состояния проскальзывания ремня посредством контроля разности фаз, коррелированной с состоянием проскальзывания ремня. Как результат, при управлении с проскальзыванием ремня, посредством которого трение ремня стабильно снижается, можно реализовывать целевое снижение энергопотребления привода.
Хотя устройство и способ управления для бесступенчатой трансмиссии ременного типа согласно настоящему изобретению были описаны в показателях примерного первого варианта осуществления, они не ограничены ими. Должно быть понятно, что могут быть произведены варианты и дополнения конструкции, без выхода из объема настоящего изобретения, определяемого прилагаемой формулой изобретения.
Первый вариант осуществления описал пример, где контур гидравлического давления типа односторонней настройки, регулируемый шаговым электродвигателем, используется для блока 7 регулирования гидравлического давления передачи. Однако также может использоваться блок регулирования гидравлического давления передачи другого типа односторонней настройки или типа двухсторонней настройки.
Первый вариант осуществления описал пример, где колеблется только вторичное гидравлическое давление. Однако, например, первичное гидравлическое давление вместе со вторичным гидравлическим давлением могут одновременно колебаться в одной и той же фазе системой управления прямого действия. В качестве альтернативы, первичное гидравлическое давление вместе со вторичным гидравлическим давлением могут колебаться в одной и той же фазе посредством колебания давления в магистрали.
Первый вариант осуществления описал пример средства колебания, где командное вторичное гидравлическое давление наделяется надлежащими колебательными составляющими. В качестве альтернативы, значения тока соленоида могут наделяться надлежащими колебательными составляющими.
Первый вариант осуществления описал пример применения транспортного средства с двигателем, включающего в себя бесступенчатую трансмиссию ременного типа. Настоящее изобретение также применимо к гибридному транспортному средству, включающему в себя бесступенчатую трансмиссию ременного типа, электрическому транспортному средству, включающему в себя бесступенчатую трансмиссию ременного типа, и тому подобному. Вкратце, оно применимо к любому транспортному средству, включающему в себя бесступенчатую трансмиссию ременного типа, которая выполняет управление передачей гидравлического давления.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - двигатель
2 - гидротрансформатор
3 - механизм переключения привода переднего хода/заднего хода
4 - механизм бесступенчатой трансмиссии ременного типа
40 - входной вал трансмиссии
41 - выходной вал трансмиссии
42 - первичный шкив
43 - вторичный шкив
44 - ремень
45 - камера первичного гидравлического давления
46 - камера вторичного гидравлического давления
5 - механизм последней понижающей ступени
7 - блок регулирования гидравлического давления передачи
70 - масляный насос
71 - клапан регулятора
72 - соленоид давления в магистрали
73 - клапан управления передачей
74 - декомпрессионный клапан
75 - соленоид вторичного гидравлического давления
76 - тяга сервопривода
77 - командный клапан передачи
78 - шаговый электродвигатель
8 - блок управления CVT
80 - датчик первичного вращения
81 - датчик вторичного вращения
82 - датчик вторичного гидравлического давления
83 - датчик температуры масла
84 - ключ схемы запрета
85 - ключ тормоза
86 - датчик открывания акселератора
87 - другие датчики и ключи
88 - блок управления двигателем
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2498132C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2009 |
|
RU2483235C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2485372C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2490533C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕСCТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2503864C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2505727C1 |
| УСТРОЙСТВО РЕКУПЕРАТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2658614C1 |
| УСТРОЙСТВО РЕКУПЕРАТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2660088C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666088C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2673306C1 |
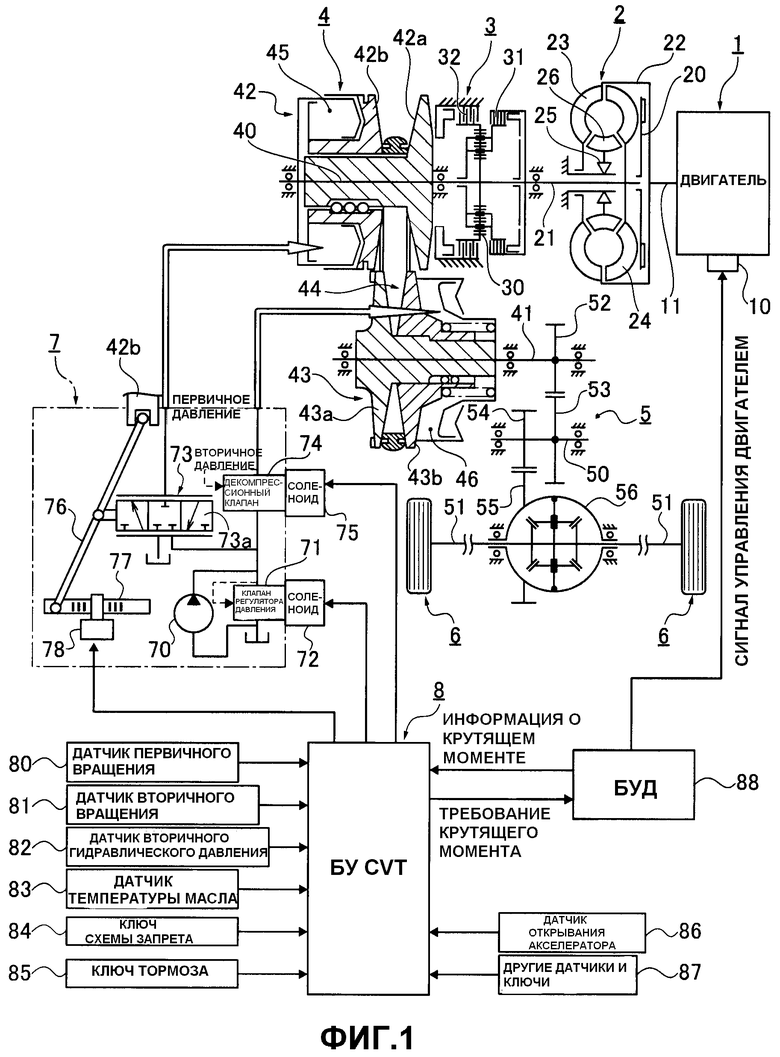
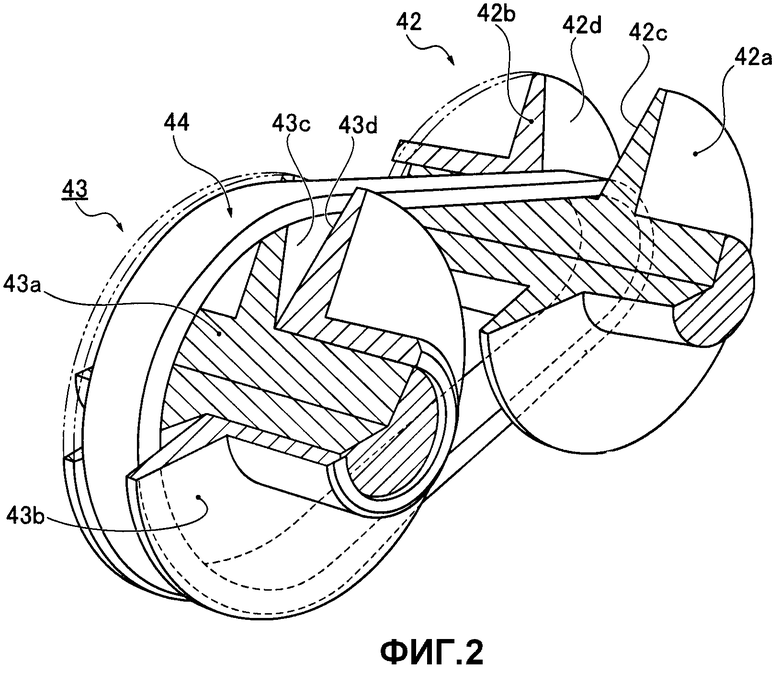
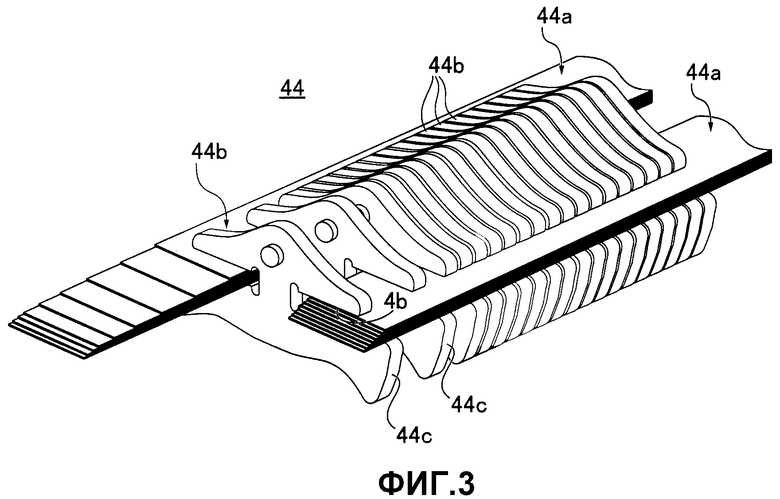
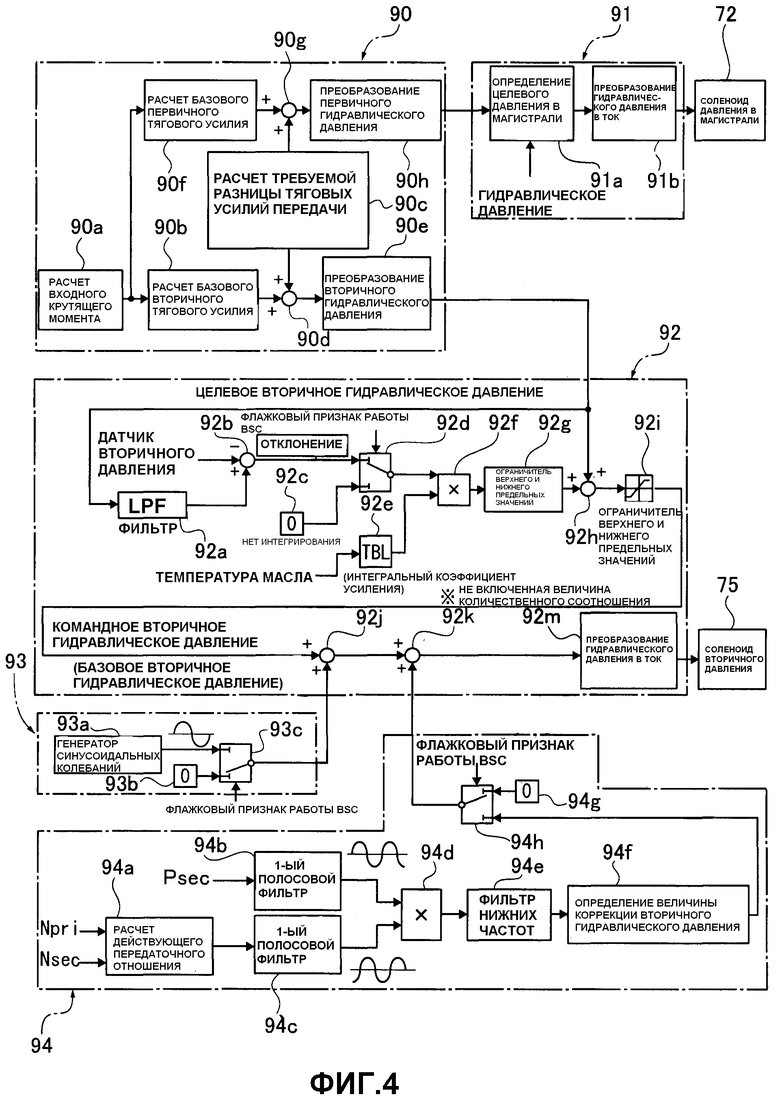
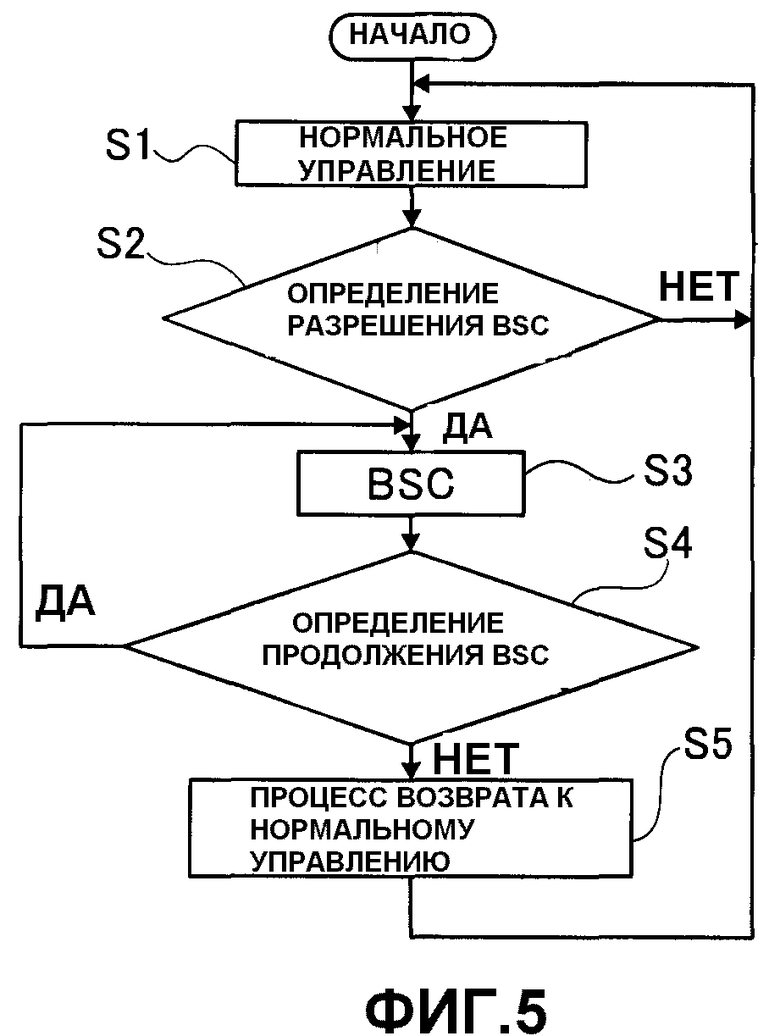
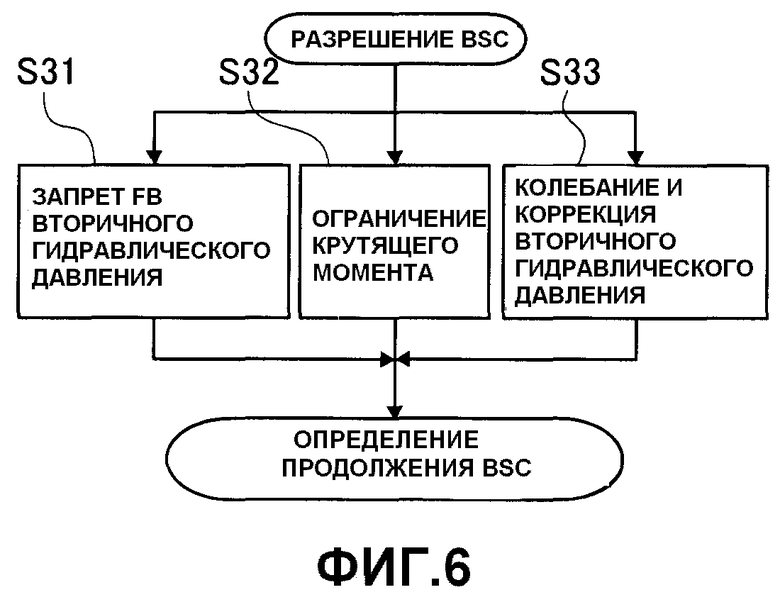

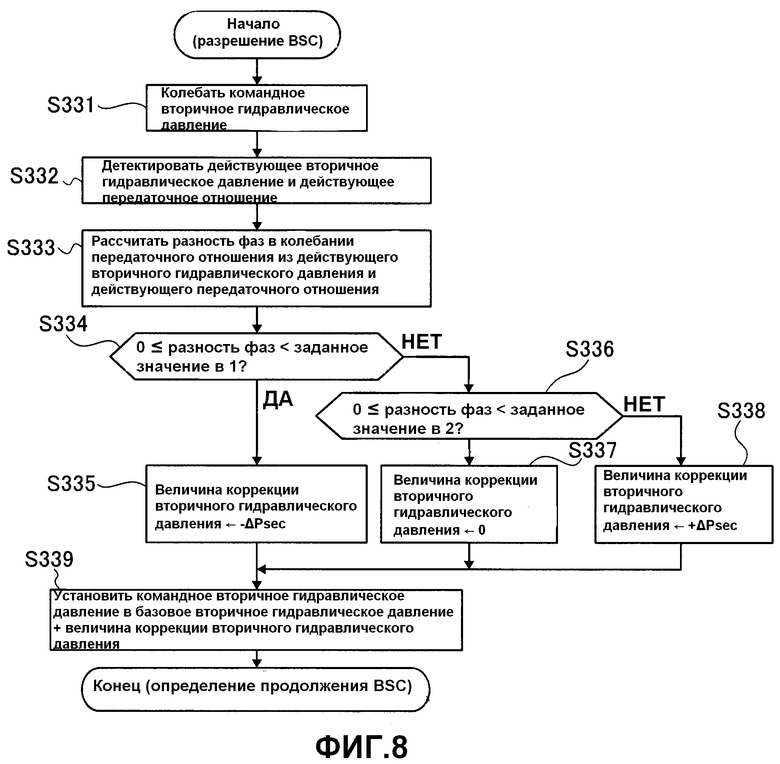
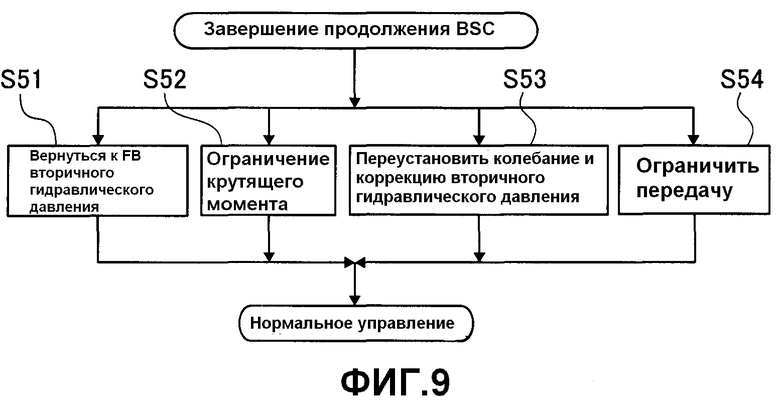
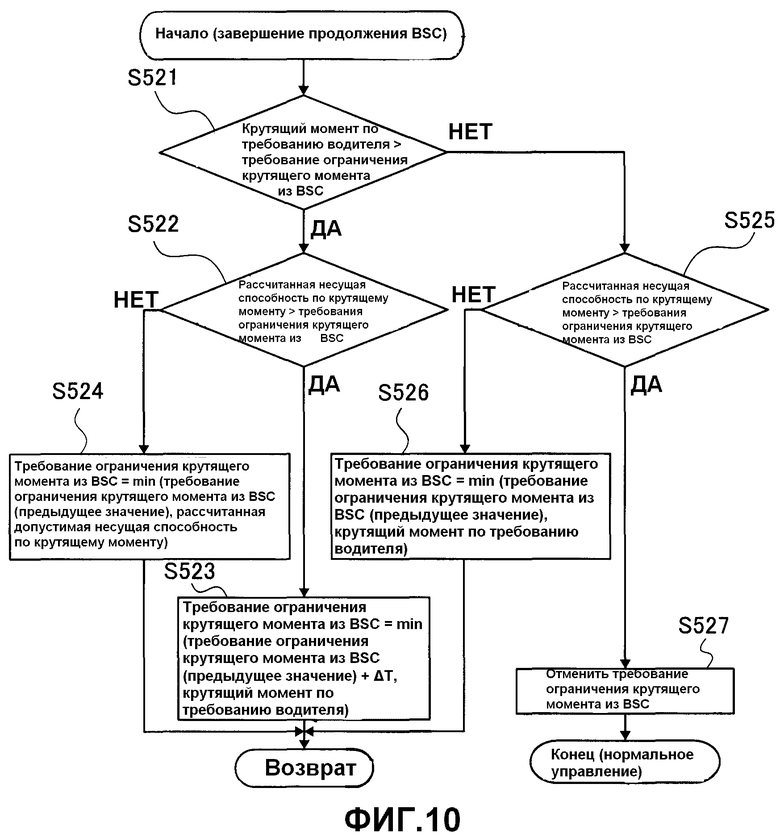



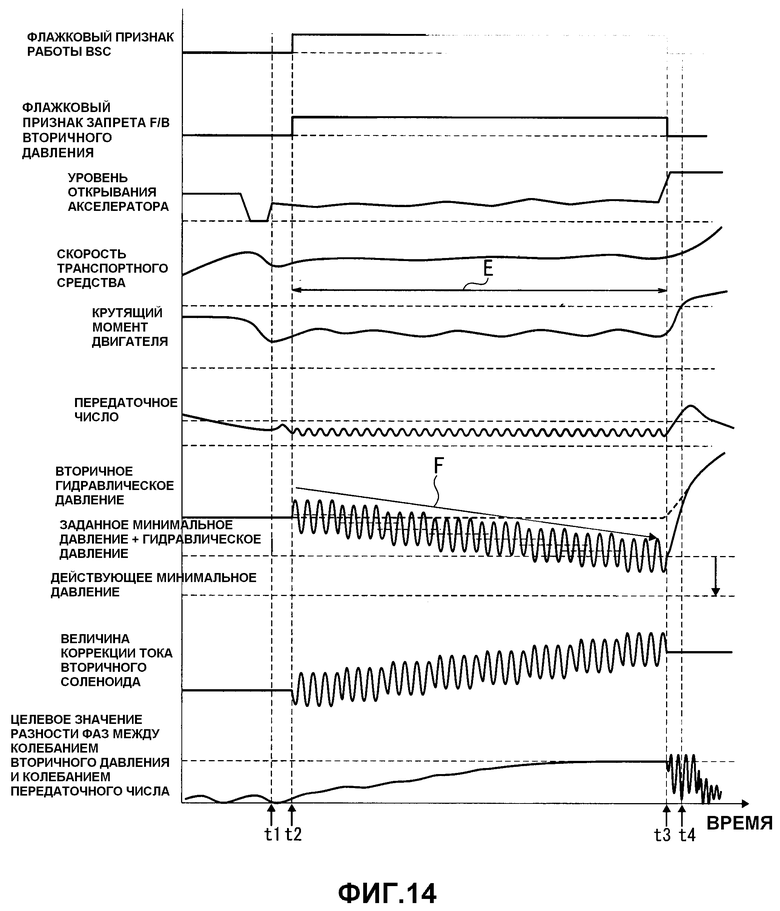
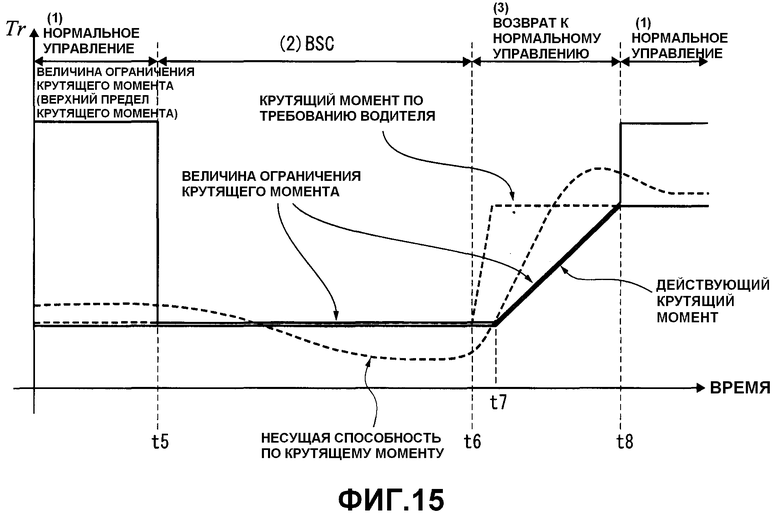
Группа изобретений относится к устройству и способу управления бесступенчатой трансмиссией. Устройство содержит первичный и вторичный шкивы, ремень, средство управления с проскальзыванием ремня, средство определения разрешения управления с проскальзыванием ремня. Средство управления с проскальзыванием ремня выполнено с возможностью колебания вторичного гидравлического давления и контроля разности фаз между колебательными составляющими. Средство определения разрешения управления с проскальзыванием ремня выполнено с возможностью разрешения средству управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня. Управление с проскальзыванием ремня осуществляется, когда скорость изменения крутящего момента является меньшей, чем заданное значение. Способ управления по первому варианту включает этапы, на которых регулируют гидравлическое давление на основе перемноженного значения колебательной составляющей, разрешают управление с проскальзыванием ремня. Способ управления по второму варианту включает этапы, на которых регулируют гидравлическое давление на основе разности фаз между колебательными составляющими, разрешают управление с проскальзыванием ремня. Одна из колебательных составляющих включена в действующее гидравлическое давление, а другая в действующее передаточное отношение. Технический результат заключается в снижении энергопотребления привода. 3 н. и 2 з.п. ф-лы, 15 ил.
1. Устройство управления для бесступенчатой трансмиссии ременного типа, содержащее первичный шкив для приема подводимой мощности от источника привода, вторичный шкив для выдачи отдаваемой мощности на ведущее колесо, и ремень, обмотанный вокруг первичного шкива и вторичного шкива, для регулирования передаточного отношения, определенного отношением радиусов движения ремня на шкивах, посредством регулирования первичного гидравлического давления на первичный шкив и вторичного гидравлического давления на вторичный шкив, при этом устройство дополнительно содержит: средство управления с проскальзыванием ремня, выполненное с возможностью колебания вторичного гидравлического давления и контроля разности фаз между колебательной составляющей, включенной в действующее вторичное гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение, чтобы оценивать состояние проскальзывания ремня, и регулирования действующего вторичного гидравлического давления для его уменьшения на основе оценки, чтобы поддерживать заданное состояние проскальзывания ремня, и средство определения разрешения управления с проскальзыванием ремня, выполненное с возможностью разрешения средству управления с проскальзыванием ремня выполнять управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемого на бесступенчатую трансмиссию ременного типа, является меньшей, чем заданное значение, при котором могут быть разделены отклонение в действующем вторичном гидравлическом давлении и колебательная составляющая, обусловленная колебанием, включенным в действующее вторичное гидравлическое давление.
2. Способ управления для бесступенчатой трансмиссии ременного типа посредством управления с проскальзыванием ремня, при котором состояние проскальзывания ремня между первичным шкивом, вторичным шкивом и ремнем регулируется гидравлическим давлением, включающий этапы, на которых: при управлении с проскальзыванием ремня колеблют гидравлическое давление для регулирования гидравлического давления на основе перемноженного значения колебательной составляющей, включенной в действующее гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение, и разрешают управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемая на бесступенчатую трансмиссию ременного типа, является меньшей, чем заданное значение, при котором колебательная составляющая, обусловленная колебанием, включенным в действующее гидравлическое давление, может быть отделена от отклонения действующего гидравлического давления.
3. Способ по п.2, дополнительно включающий этап, на котором при управлении с проскальзыванием ремня оценивают состояние проскальзывания ремня посредством контроля разности фаз, рассчитанной из перемноженного значения, и регулируют гидравлическое давление на основе такой оценки, чтобы поддерживать заданное состояние проскальзывания ремня.
4. Способ управления для бесступенчатой трансмиссии ременного типа посредством управления с проскальзыванием ремня, при котором состояние проскальзывания ремня между первичным шкивом, вторичным шкивом и ремнем регулируется гидравлическим давлением, включающий этапы, на которых: при управлении с проскальзыванием ремня колеблют гидравлическое давление для регулирования гидравлического давления на основе разности фаз между колебательной составляющей, включенной в действующее гидравлическое давление, и колебательной составляющей, включенной в действующее передаточное отношение, и разрешают управление с проскальзыванием ремня, когда скорость изменения крутящего момента, подаваемая на бесступенчатую трансмиссию ременного типа, является меньшей, чем заданное значение, при котором колебательная составляющая, обусловленная колебанием, может выделяться из отклонения в действующем гидравлическом давлении.
5. Способ по п.4, при котором заданное значение скорости изменения крутящего момента устанавливается в предельном диапазоне, в котором могут быть выделены колебательная составляющая, включенная в действующее гидравлическое давление, и колебательная составляющая, включенная в действующее передаточное отношение.
| JP 2003065428 A, 05.03.2003 | |||
| JP 2004293652 A, 21.10.2004 | |||
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ С ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ | 1994 |
|
RU2133895C1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 1991 |
|
RU2012833C1 |

