Изобретение относится в общем к бесступенчатым трансмиссиям (БТ), и в частности к изменяющим передаточное отношение составным частям ("вариаторам") БТ того типа, которая имеет полосу и желобочные колеса. В конструкции этого типа БТ предусмотрена беспрерывная, гибкая и в значительной степени неэластичная полоса, обычно имеющая форму ремня, проходящего по двум узлам шкивов, которые вращаются на двух параллельных, но размещенных на расстоянии осях, лежащих в общей радиальной плоскости. Ширина полосы не изменяется, при этом два желобочные колеса каждого узла шкива имеют общую ось, однако величина осевого зазора между ними может изменяться и таким образом изменяется радиус окружности, по которой двигается полоса в контакте с узлом шкива. Если желобочные колеса первого из двух узлов раздвигаются в осевом направлении, то в результате этого радиус окружности контакта полосы уменьшается, при этом желобочные колеса второго узла должны сближаться для увеличения радиуса, таким образом поддерживая натяжение ремня. В это же время, если первый и второй узлы считаются соответственно как входной и выходной элементы вариатора, то передаваемое передаточное отношение уменьшается. С другой стороны, если желобочные колеса первого узла сблизились в осевом направлении, а желобочные колеса второго узла разошлись, то в результате этого передаточное отношение возрастает. Все время в ходе работы желобочные колеса и первого и второго узлов должны перемещаться в осевом направлении с силой, достаточной для создания трения между шкивом и ремнем, величина которого достаточна для передачи между ними требуемого тягового усилия. Обычно одно желобочное колесо каждого узла шкива неподвижно закреплено на своем валу, в то время как другое установлено с возможностью скольжения на валу с помощью осевых шлицев, при этом плоскость желобочного колеса, наиболее отдаленная от ремня, представляет собой поверхность поршня, двигающегося в цилиндре, сообщенном с источником жидкости, находящейся под гидравлическим давлением, который создает требуемое осевое усилие. Очевидно, что если одно желобочное колесо каждого узла шкива зафиксировано и при этом другое желобочное колесо установлено с возможностью осевого перемещения, как только что это было описано, то любое изменение передаточного отношения должно сопровождаться легким осевым смещением ремня относительно каждого узла шкива. Средства для предотвращения любого неблагоприятного эффекта этого явления хорошо известны специалисту в данной области техники, в том числе осевое реверсирование положения двух желобочных колес, зафиксированного и подвижного, между двумя узлами шкивов, таким образом, что направление осевого сдвига ремня в узле, в котором желобочные колеса сближаются, соответствует соответствующему сдвигу ремня в другом узле, в котором желобочные колеса расходятся.
При управлении вариаторами этого типа для оператора было обычным изменять передаточное отношение тем, что стало известным в данной области техники как "регулирование передаточного отношения", что представляет собой так сказать прямую команду на гидравлические органы управления двух подвижных желобочных колес для того, чтобы вызвать заранее определенное расхождение одной пары желобочных колес и относительное заранее определенное сближение другой пары, поддерживая при этом достаточную осевую нагрузку на оба узла шкивов для поддержания необходимой силы трения между ремнем и желобочным колесом. В противовес этому последние усовершенствования в области техники, относящейся к ротационно-тяговым БТ с тороидальной траекторией, продемонстрировали преимущества так называемого "регулирования крутящего момента", когда по желанию оператора, путем перемещения акселераторной педали или другого элемента управления, ведущий крутящий момент определенной величины прикладывается к вариатору или через ведущий вал (т.е. нагрузка крутящим моментом на двигатель) или через определенный выходной крутящий момент, прикладываемый к ведомому валу. Примеры управляющих систем этого типа для БТ, и примеры БТ с тороидальной траекторией, хорошо подходящих для такого управления, могут быть найдены в патентных публикациях WO 93/21031 и ЕР-В-0444086 соответственно.
Иногда делались предложения включить некоторые элементы регулирования крутящего момента в БТ, в которой использован вариатор того типа, который имеет полосу и желобочные колеса. Одно такое предложение появилось в научном докладе 730003 под заголовком "Расчетное Уравнение для Бесступенчатой Клиноременной Трансмиссии, в которой регулируются скорость и крутящий момент", представленном на Международном Автомобильно-инженерном Конгрессе и Выставке в Детройте, Штат Мичиган, в январе 1973 года. В вариаторе, представленном этим предложением, один из двух узлов шкивов проявлял некоторую способность чувствовать крутящий момент, вызванную способностью одного из желобочных колес двигаться по спирали относительно вала, на котором оно было установлено, в то время как другой узел шкива не был чувствительным к крутящему моменту, однако чувствовал входную скорость. Доклад предлагает использование таких БТ в некоторых специализированных транспортных средствах, таких как снегоходы. Тем не менее, следует заметить, что управляющие движения оператора такого транспортного средства будут без всякого сомнения связаны через акселераторную педаль с движениями регулятора транспортного средства, при этом Доклад не содержит раскрытия того, что относительные движения желобочных колес должны быть под прямым контролем оператора или связаны с его управляющими движениями. В результате чего можно сделать вывод, что эта БТ имеет ограниченную способность управляемости из-за того, что любая выходная нагрузка - так сказать, результат выходной скорости и выходного крутящего момента - есть, в пределах передаточного отношения вариатора, только простая равновесная комбинация входной скорости и входного крутящего момента. БТ с такой ограниченной способностью к управляемости не отвечает требованиям, предъявляемым к современным транспортным средствам. Существует и другое ограничение вариатора, описанного в Докладе, которое заключается в том, что его невозможно использовать для того типа БТ, который в настоящее время очень необходим для практического использования в автомобилях, когда рабочий интервал расширяется для того, чтобы он работал в более чем одном так называемом "режиме", в каждом из которых вариатор продвигается от одного конца интервала передаточных отношений к другому его концу. В таких мультирежимных моделях является обычным, чтобы энергия циркулировалась по вариатору по замкнутому циклу в одном из этих режимов, в ходе которого выходная мощность вариатора и его подводимая мощность действуют как два входных сигнала на планетарную передачу и достигается особое значение передаточного отношения, так называемое "зубчатое нейтральное положение", когда вся передаваемая энергия циркулируется по замкнутому циклу таким образом, что выход трансмиссии и, следовательно, автомобиль находиться в неподвижном состоянии. На практике необходимо, чтобы в большинстве автомобильных трансмиссий, которые имеют такой рециркуляционный режим, вариатор искал зубчатое нейтральное положение, когда, к примеру, двигатель начинает работать и достигает скорость холостого хода в то время как транспортное средство находиться все еще в состоянии покоя. Доклад не раскрывает возможность существования режима рециркуляции мощности, при котором достигается зубчатое нейтральное положение, а при отсутствии команды водителя описанный вариатор просто ищет одно предельное значение своего диапазона передаточных отношений.
БТ, выполненная в соответствии с настоящим изобретением, отличается также от того вида вариатора, который показан в описании патентной заявки США US-A- 5217412. Как неоднократно заявлялось в этом Описании, она относится к БТ, в которой оператор создает то или иное значение передаточного отношения вариатора и изменения в значении крутящего момента не будут иметь прямого эффекта на значение передаточного отношения. В соответствии с настоящим изобретением прямого регулирования значения передаточного отношения не существует; путем изменения величины воздействия на педаль акселератора или на другой орган управления оператор создает тот или иной крутящий момент на одном или другом валу вариатора и, в рамках рабочих пределов, этот крутящий момент будет поддерживаться даже при изменении значения передаточного отношения. Другое отличие от патентной заявки US-A-5217412 заключается в том, что для эффективного "регулирования крутящего момента" желательно для связи между по меньшей мере одним из узлов шкивов и его валом создать силу, зависящую как от величины крутящего момента, так и от его направления; эта сила действует таким образом, что стремиться изменить величину осевого разведения желобочных колес. В патентной заявке US-A-5217412 существует только одна чувствующая крутящий момент связь (деталь 24) между двумя секциями вала одного из шкивов. Когда она работает таким образом, что чувствует крутящий момент, то при этом не создается какой-либо прямо относящейся осевой силы, прилагаемой для стимулирования относительного движения шкивных желобочных колес.
Особенность, в основном присущая БТ ременчатого типа с возможностью управления крутящим моментом, заключается в том - существует ли чувствующая крутящий момент связь между узлом шкива и его валом, так чтобы создавать возможность движения шкива по валу и создавать силу между шкивом и валом, являющуюся функцией величины и направления крутящего момента, всякий раз когда этот вал передает крутящий момент на ремень противодействие на связи создает силу, стремящуюся развести желобочные колеса, и всякий раз, когда этот вал принимает крутящий момент от ремня соответствующая сила стремится свести желобочные колеса вместе. Таким образом, содержание настоящего изобретения должно быть отличено от БТ ременчатого типа, показанной в описании Патентной заявки США US-A-5173084, в которой существует чувствующая потенциально крутящий момент связь между каждым узлом шкива и его соответствующим валом. Тем не менее, в Патентной заявке США US-A-5173084 действие двух потенциально чувствующих крутящий момент связей между узлами шкивов и их соответствующими валами различно. Относящиеся к крутящему моменту силы, созданные в этих двух связях, действуют в унисон на оба узла шкивов, стремясь или сблизить колеса всякий раз, когда энергия передается от входного вала (12) к выходному валу (14), или развести их, когда энергия передается в обратную сторону. Как это ясно объяснено в описании патентной заявки, к примеру в кол. 5 строки 23- 32, это сделано для упрощения и/или уменьшения объема гидравлических насосов. Управление крутящим моментом не достигается БТ, описанной в этом описании, и даже не упомянута какая-либо возможность управления крутящим моментом. Было особенно отмечено, что действие чувствующих крутящий момент связей, описанных в описании Патентной заявки US-A-5173084, так же как и в уже упомянутом Докладе 730003, предотвращает их от использования в многорежимных БТ, в которых при определенных обстоятельствах требуется использование вариатора - к примеру при работе на холостом ходу - для поиска зубчатого нейтрального положения.
Настоящее изобретение возникло из понимания - как БТ того типа, которая имеет полосу и желобочные колеса, может быть улучшена за счет того, что станет способной регулировать крутящий момент до такой степени, которая удовлетворяла бы требования, предъявляемые к современным транспортным средствам, и которая сравнима с управляемостью уже упомянутой БТ с тороидальной траекторией.
Изобретение определено формулой изобретения, содержание которой включено в описание настоящего изобретения, и раскрывает БТ, которые будут описаны со ссылками на сопровождающие чертежи, часть которых представляют собой диаграммы и выполнены схематично, и на которых
Фиг. 1 представляет собой осевой разрез, проходящий по элементам известного вариатора, содержащего ремень и желобочные колеса.
Фиг. 2 представляет собой подобный вид, проходящий по вариатору, выполненному в соответствии с настоящим изобретением, в сочетании с элементами гидравлической схемы управления
Фиг. 3 показывает некоторые существенные элементы двухрежимной БТ, использующей вариатор, показанный на фиг. 2.
Фиг. 4 - то же, что и фиг.2, но показывает альтернативный вариант вариатора.
Фиг. 5 - чертеж гидравлической схемы.
Фиг. 6 - осевой разрез, проходящий по желобочным колесам БТ, использующей схему, показанную на фиг. 5.
Фиг. 7 представляет собой осевой разрез, проходящий по другому вариатору.
Фиг. 8 показывает гидравлическую схему, подсоединенную к вариатору, показанному на фиг. 7.
Фиг. 9 и 10 - то же, что и фиг. 7, но показывают другие вариаторы.
Фиг. 11 показывает гидравлическую схему, присоединенную к вариаторам, показанным на фиг. 9 и 10.
Фиг. 12 представляет собой осевой разрез, проходящий по следующему вариатору.
По ходу описания чертежей элементы, выполняющие по-существу подобные функции, могут, где позволяет контекст, обозначаться одними и теми же ссылочными номерами.
Фиг. 1 показывает вариатор, в котором ремень или цепь 1, гибкая, но нерастяжимая и с постоянной шириной, передает тяговое усилие между первым узлом 2 шкива, содержащим желобочные колеса 3,4 и вал 5, и вторым узлом 6 шкива, содержащим желобочные колеса 7,8 и вал 9. Валы 5 и 9 установлены с возможностью вращения вокруг разведенных, но параллельных осей 10 и 11 соответственно. Желобочные колеса 3 и 7 закреплены на соответствующих валах, однако желобочное колесо 4 закреплено на валу 5 с помощью шлицевого соединения 12 и, таким образом, способно совершать некоторое относительное осевое перемещение. Таким же образом желобочное колесо 8 закреплено на валу 9 с помощью шлицевого соединения 13. Желобочные колеса 4 и 8 действуют как поршни, перемещаемые в гидравлических цилиндрах 15 и 16, соответственно, при этом цилиндры сообщены через блок 17 управления как с управляющим элементом 18, так и с источником 19 гидравлической энергии.
Валы 5 и 9 являются соответственно входным и выходным элементами вариатора, при этом стрелки Тin, Nin, Тout, Nout обозначают соответственно входной крутящий момент, входную скорость, выходной крутящий момент и выходную скорость вариатора. Блок 17 управления действует таким образом, что создает гидравлическое давление PT в цилиндре 16, достаточное для поддержания натяжения ремня, и давление PT+PR в цилиндре 15, где PR представляет собой приращение, зависящее от величины опускания педали 18, при этом в том случае, если это приращение положительно, то оно вызывает сближение желобочных колес 3 и 4, которое приводит к увеличению значения передаточного отношения, если приращение отрицательно, то оно вызывает расхождение желобочных колес 3 и 4 и уменьшение значения передаточного отношения. Тем не менее, с желобочными колесами 3 и 7, закрепленными на соответствующих валах 5 и 9, и желобочными колесами 4 и 8, установленными на этих валах только с ограниченной свободой перемещения в осевом направлении, не существует какого-либо пути, при отсутствии гидравлического давления, под действием которого любое из желобочных колес может двигаться автоматически, изменять передаточное отношение в ответ на изменение крутящего момента, передаваемого по вариатору. Таким образом, это становиться неприемлемым для БТ, работающей в одном, двух и более режимах, в которых рециркуляция происходит в по меньшей мере одном из этих режимов. В таком вариаторе также не просто, из-за того что этот вариатор не чувствует крутящий момент, определить наиболее благоприятное значение давления PT, которое, для долговечности и производительности, в наименьшей степени согласовалось бы с непроскальзыванием ремня.
С каждым изменением команды с блока 17 управления значение величины давления PR изменяется, как только узел 2 шкива раскрывается или закрывается, то узел 6 совершает обратный ход, таким образом обеспечивается - через размещенные с противоположных сторон цилиндры 15 и 16 - то, что центральная линия 20 ремня 1 остается по существу в одной и той же радиальной плоскости относительно валов 5 и 9.
В соответствующем вариаторе, выполненным согласно настоящему изобретению и показанном на фиг. 2, желобочные колеса 3 и 4 узла 2 установлены на валу 5 с возможностью движения с помощью спиральных шлицев 21, 22, соответственно, при этом эти шлицы имеют различные направления спиралеобразной образующей, а желобочные колеса 7 и 8 узла 6 установлены на валу 9 с помощью осевых шлицев 23, 24. Желобочные колеса 3 и 7 установлены как поршни, имеющие возможность передвижения в цилиндрах 25 и 26, а камеры цилиндров 15 и 25 сообщены между собой и таким образом имеют равное гидравлическое давление, так же как и цилиндры 16 и 26. Спиральное зацепление между желобочными колесами 3, 4 и их валом 5 может на практике быть выполнено в виде шариковых дорожек, при этом позиция 27 указывает на шарики. "Направления" спиральных линий 21, 22 должны быть выбраны таким образом, чтобы соответствовать направлениям вращения, показанным стрелками NIN и NOUT, за счет чего любой крутящий момент, передаваемый между желобочным колесом и ремнем, увеличивает пропорциональную осевую силу как на желобочном колесе, так и на валу, и любое приложение крутящего момента приведет к изменению значения передаточного числа для уменьшения крутящего момента. Управление вариатором будет осуществляться так же, как это показано на фиг. 1, путем изменения положения элемента 18 посредством гидравлического блока 17 управления, однако сейчас отдельные насосы 30,31 подают жидкость к двум узлам 2 и 6 шкивов. Насос 30 подает жидкость к цилиндрам 15 и 25 узла 2 через впускной проход 32, а насос 31 подает жидкость к цилиндрам 16 и 26 узла 6 через впускной проход 33. Жидкость затем уходит из цилиндров узлов 2 и 6 через выпускные проходы 34 и 35 соответственно, откуда по управляющим клапанам 36,37 к стоку 38. Основное назначение клапана 39 переменного сопротивления, расположенного между клапанами 36, 37 и стоком 38, и так же управляемым от узла 17, установить "основное значение" PT давления в цилиндрах, достаточного в любое время, когда осуществляется тяговое усилие, для поддержания достаточного натяжения между желобочнами колесами и ремнем. Сейчас, всякий раз, когда ведущие условия таковы, что усилие передается от узла 2 к узлу 6, узел 17 управляет клапаном 36 и заставляет открываться клапан 37. Основное давление PT таким образом установлено в цилиндрах 16 и 26, а в цилиндрах 15 и 25 узла 2 установлено давление PT+PC, где PC является функцией передаваемого крутящего момента, который желает оператор (с помощью педали 18), и подбирает наружное осевое давление, которое желобочные колеса 3, 4 будут осуществлять в ответ на этот желаемый крутящий момент. Если передача является величиной, зависимой от крутящего момента в обратном направлении, то блок 17 управляет клапаном 37 и открывает клапан 36, таким образом основное давление PT устанавливается в цилиндрах 15, 25, а PT плюс PC в цилиндрах 16, 26 узла 6. Этот контроль величины PC означает, что осевые нагрузочные силы, воздействующие на два узла шкивов, напрямую реагируют на команды оператора, и их величины могут быть представлены как заранее определенная функция величины этой команды.
В варианте изобретения, показанном на фиг.4, желобочное колесо узла 2 установлено на спиралеобразном шариковом винте 22 и, как и прежде, работает в пределах цилиндра 15, но желобочное колесо 3 установлено на осевом шлице 42, выполненном на втулке 41, выполненной за одно целое с желобочным колесом 4. Желобочные колеса 3 и 4 таким образом вращаются вместе, но они способны совершать ограниченное относительное осевое движение, и обойма 43 упорного подшипника, установленного на фланце 44, выполненном за одно целое с валом 5, фиксирует относительное осевое положение этого вала и желобочного колеса 4. В узле 6 желобочное колесо 8 установлено на прямых шлицах 24 и двигаются, как и прежде, как поршень в цилиндре 16, но желобочное колесо 7 теперь просто постоянно соединено с валом 9. Однозаходный шариковый винт 22 сейчас воспринимает крутящий момент от обоих желобочных колес узла 2, так как осевой шлиц 42 воспринимает крутящий момент от желобочного колеса 3 к желобочному колесу 4, откуда через винт 22 к валу 5. Как это показано на фиг . 1, расположение цилиндров 15 и 16 с противоположных сторон обеспечивает то, что как только желобочные колеса одного из узлов 2,6 расходятся, в то время как колеса другого узла сходятся, и наоборот, то проекция центральной линии 20 ремня 1 остается по-существу постоянной.
На практике было бы так же желательно избежать любого рассогласования, которое может возникнуть по любой причине в ходе работы между идеальной силой зажима на ремне и значениями давлений в цилиндрах 15, 25 и 16, 26, особенно по направлению к пределам диапазона передаточного отношения, когда ремень находиться вблизи от его максимального и минимального радиусов на каждом узле шкива. Хотя это и не идентично по своему эффекту, аспекты такой особенности БТ, выполненной в соответствии с настоящим изобретением, могут быть сравнены с особенностями "гидравлического концевого стопора" для ротационно-тяговой БТ с тороидальной траекторией, описанной например в патентных описаниях GB-B-2023753, ЕР-В-0133330 и ЕР-В-0444086. На фиг.2 расположение и размер выпускных проходов 34 и 35 и расположение проходов 45 и 46 способствует созданию такого эффекта "конечного стопора", хотя будет ясно, что другие не показанные особенности были бы на практике также необходимы для обеспечения того, чтобы синхронизация и величина эффекта были бы подходящими. В узле 2 шкива размер и расположение выпускного прохода 34 выбраны таким образом относительно цилиндра 15, чтобы, если желобочные колеса 3 и 4 стремятся разойтись в осевом направлении за заранее определенный предел, то желобочное колесо 4 будет в конечном счете полностью закрывать проход 34, перекрывая общий выход для жидкости двух сообщенных цилиндров 25 и 15, таким образом давление в этих двух цилиндрах возрастет до величины давления в насосе 30 и таким образом будет противостоять дальнейшему расхождению желобочных колес. С другой стороны, если желобочные колеса приближаются одно к другому ближе, чем это было заранее определено, то проход 45 будет открыт. Этот проход сообщается прямо или косвенно со сливом 38 через клапан 39, но под управлением перепускного клапана 36. Таким образом это уменьшает давление в цилиндрах 15, 25 и препятствует дальнейшему приближению желобочных колес. В узле 6 шкива расположение и выбор размеров прохода 35 и положение прохода 46 будет работать на подобный эффект.
Будет принято во внимание, что действие такого механизма "гидравлического конечного стопора" на практике может не только успешно достигнуть цели в предотвращении сильного увеличения сжимающей силы между желобочным колесом и ремнем или от ее сильного уменьшения на каждом из узлов шкивов, но также иметь связанный с этим эффект стремления сохранить радиус контакта ремня и желобочного колеса в заранее определенных пределах. В этой связи фиг. 2 так же показывает и механические "концевые стопоры" на шкиве в виде колец 29, установленных с возможностью вращения на валах 5, 9 между желобочными колесами узлов 2 и 6, которые физически предотвращают контакт ремня 1 с каждым из желобочных колес, к примеру если гидравлические стопоры не способны предотвратить расхождение желобочных колес на большую величину, при которой ремень может контактировать с валами. Нет такой необходимости в таких колесах в варианте, показанном на фиг.4, где втулка 41 узла 2 и вал 9, показанный на фиг. 6, вращаются в согласованном режиме с желобочными колесами 3,4 и 7,8 соответственно. Конечно, возможны и многие другие варианты физических стопоров для предотвращения расхождения или сближения желобочных колес за выбранные пределы.
Фиг. 3 показывает существенные элементы двухрежимной БТ, в которой первичный двигатель 50 приводит во вращение вал 5 узла 2 шкива (как это показано на фиг. 2) со скоростью NI и также, через ремень 51, передающий вращение с постоянным передаточным отношением, которое сокращает ведущую скорость до величины 1/2 NI, на одну половину низкорежимной муфты 52. Другая половина этой муфты соединена с опорой 53 планетарной шестерни планетарной передачи 54, зубчатое колесо 55 с внутренним зацеплением которой соединено и с выходным элементом 56 БТ и с одной из половин 57 высокорежимной муфты 58. Другая половина 59 этой муфты и центральное зубчатое колесо 60 планетарной передачи 54 оба подсоединены к выходному валу 9 вариатора, к так сказать к общему валу желобочных колес 7 и 8.
Для иллюстрации действия транспортного средства, содержащего БТ, показанную на Фиг.2 и 3, сущность операций будет сейчас объяснена с момента состояния покоя. Оператор сможет управлять линией передачи транспортного средства с помощью обычного рычага переключения тяги управления (имеющей вход в блок 17, обозначенного схематически позицией 47), имеющего по меньшей мере стандартные N,P,D и R позиции.
Когда двигатель 50 начинает работать с рычагом переключения тяги управления в положениях "N" или "Р", то обе муфты 52 и 58 находятся в положении расцепления. При выборе положения "D" муфта 52 начнет занимать положение сцепления. Если транспортное средство находится в неподвижном состоянии и вариатор не имеет передаточное отношение, известное в данной области техники как "нейтральная передача" (т.е. значение передаточного отношения, которое для ограниченного вращения входного вала 5 создает нулевое вращение выходного элемента 56), то тормозящий крутящий момент будет приложен к вариатору муфтой 52. До тех пор пока акселераторную педаль 18 будут держать в нажатом положении для снижения величины вращения оба клапана 37 и 36 управления будут открыты и не будет перепада давления в двух узлах 2, 6 шкивов. Тем не менее обычно будет существовать "основное" давление, обеспеченное клапаном 39, как это уже было объяснено. Принимающая планетарная передача 54 имеет передаточное отношение E=2, при этом ремень 51 имеет постоянное передаточное отношение, равное 1/2, как это уже было объяснено. В неподвижном положении транспортного средства ремень 51 будет пытаться привести в движение выходной вал 9 вариатора, через муфту 52 и планетарную передачу 54, со скоростью, величина которой равна 3/2NI. Вал 9 может в действительности вращаться со скоростью, величина которой равна, ну скажем, 1/2 NI, и если это так, то он будет пытаться разогнать как себя, так и входной вал 2 вариатора. Ускоряющий крутящий момент на последнем будет создавать через действие винтовые шариковые дорожки 21, 22 осевые силы, сводящие два желобочных колеса 3, 4 узла 2 шкива один к другому, таким образом увеличивая передаточное отношение. Силам не будет оказано какое-либо сопротивление, потому что не существует перепада давления в узлах 2 и 6 шкивов.
Если значение передаточного отношения отклонится от установленного значения, то крутящий момент на входном валу 5 будет реверсирован и осевые силы разведут желобочные колеса одно от другого. Таким образом, без любого внешнего управления этот чувствительный к крутящему моменту вариатор найдет правильное для принятия передаточное отношение перед тем как транспортное средство выйдет из положения покоя на свой низкоскоростной режим, это так сказать тот режим, при котором муфта 52 находится в положении сцепления, муфта 58 в положении расцепления и энергия рециркулирует по вариатору.
Когда педаль 18 держат сейчас в опущенном положении, то блок 17 управления регистрирует команду и, зная режим и текущее значение передаточного отношения (с помощью входных сигналов, показанных схематически позициями 61, 62), интерпретирует эту команду в виде выходного крутящего момента или нагрузки от крутящего момента на двигатель. Для того, чтобы двигаться вперед с низкоскоростным режимом необходимо, чтобы значение передаточного отношения вариатора уменьшилось с 3/2 до 1/2. Таким образом энергия передается от узла 6 к узлу 2, и желобочные колеса 7,8, установленные на выходном валу 9, должны двигаться навстречу один к другому. Это вызывается открывающим клапаном 36 блока управления, а подъем давления в сообщающихся цилиндрах 16, 26 вызывается путем увеличения переменного сопротивления в клапане 37.
Осевая нагрузка на желобочные колеса 7, 8 будет сейчас приложена совокупностью сжимающего давления (создаваемого клапаном 39) и перепада давления, созданного клапаном 37 управления крутящим моментом. Осевая нагрузка на желобочные колеса 3, 4, установленные на валу 5, будет приложена этим же сжимающим давлением (PT) и силой от спирали. Так как углы конических поверхностей всех желобочных колес равны, то из этого следует, что когда сила, созданная перепадом (т. е. управление крутящим моментом) давления, сбалансирует силу от спирали, то передаточное отношение вариатора будет устойчивым. Так как осевая сила от спирали является функцией входного крутящего момента вариатора, то перепад давления должен сам по себе являться функцией этого крутящего момента, будет ли контролирующее крутящий момент давление прилагаться к узлу 2 шкива через клапан 36, или к узлу 6 через клапан 37. Перепад давления конечно представляет собой также функцию "выходного" крутящего момента вариатора, модулированного мгновенным передаточным отношением вариатора.
Если условия позволяют, то перепад давления приведет вариатор к более низкому значению его передаточного отношения, к 1/2. Тогда блок 17 вызовет расцепление низкорежимной муфты 52 и одновременное сцепление высокорежимной муфты 58, при этом значения передаточных отношений вариатора и планетарной передачи были выбраны таким образом, что изменение является изменением, известным в данной области техники как "синхронное" и не вызывающее мгновенное изменение скорости вращения выходного элемента 56. С находящейся в положении сцепления муфтой 58, и таким образом с передачей в "высокоскоростном режиме", дальнейшее нажатие оператором на педаль 18 вызовет обратное вращение вариатора по всему его диапазону передаточного отношения, от 1/2, где он в настоящее время находится, к его максимальному значению 2. В течение этого режима, всякий раз когда энергия должна передаваться от первичного двигателя 50, скручивающая нагрузка будет определяться клапаном 36 управления давлением.
Действие клапана 39 в установлении основной "сжимающей силы" между желобочными колесами и ремнем было уже описано. Необходимо обратить внимание, что полезная энергопередающая сила между желобочными колесами и ремнем представляет собой тангенциальную силу и что существует верхний предел доли осевой сжимающей силы, как это определено клапаном 39, при котором эта тангенциальная сила может быть без проскальзывания. Этот предел определен коэффициентом трения между желобочными колесами и ремнем. С другой стороны, чрезмерная сжимающая сила сократит долговечность и эффективность.
Когда БТ настроена управлением крутящего момента, то просто вычислить тангенциальную силу при любом значении передаточного отношения и таким образом определить оптимальную сжимающую силу. Значение передаточного отношения измеряется просто, и блок 17 получает электрический входной сигнал этого измерения, обозначенный позицией 62. Тангенциальная сила представляет собой функцию крутящего момента, разделенного радиусом контакта между ремнем и желобочным колесом, а этот радиус сам по себе является функцией значения передаточного отношения. Входной сигнал к клапану 39 от блока 17 программирует клапан регулировать гидравлическое давление в цилиндрах 15, 25 и 16, 26, так чтобы найти эту оптимальную силу.
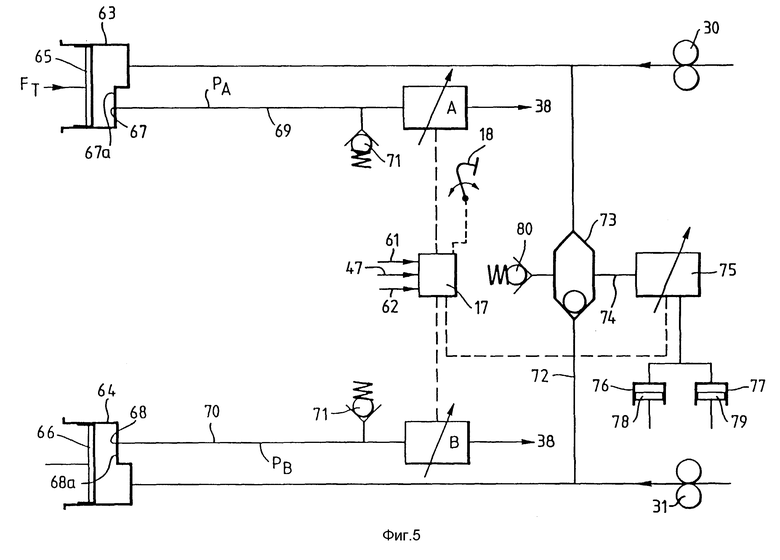
На фиг. 5 насосы 30 и 32 доставляют жидкость в цилиндры 63, 64, имеющие поршни 65, 66. При нормальной работе линии возврата жидкости из этих цилиндров в дренаж 38 осуществляется через выходные отверстия 67 и 68, по линиям 69 и 70, и клапаны А и В управления соответственно, при этом значения давления в линиях 69 и 70 составляют PA и PB соответственно. Для предотвращения возникновения давлений PA и PB, значения которых превышают заранее определенные значения, предусмотрен выпускной клапан 71. В ротационно-тяговой БТ с тороидальной траекторией и с возможностью управления крутящим моментом, в такой, которая описана, к примеру, в описании Европейской патентной заявки ЕР-В-0444086, детали 65 и 66 находятся в определенном соотношении с противоположными поверхностями гидравлического поршня двойного действия, соединенного с несущим элементом одного из роликов, ориентация которого изменяет для изменения значения передаваемого передаточного отношения. В вариаторе чувствующей крутящий момент БТ, имеющей ремень и желобочные колеса, показанном например на предыдущих фигурах, цилиндры 63 и 64 обычным образом сообщены соответственно с каждым из двух узлов 2 и 6 шкивов вариатора, и в этом примере выполнения изобретения значения давлений, подаваемых на эти два узла, регулируются таким образом, чтобы создать в одном из таких узлов арифметическую сумму желаемой силы зажимы и силы, связанной с крутящим моментом, а в другом узле только силу зажима. Сила зажима побуждает желобочные колеса вступить с ремнем в соответственно устойчивый передающий тяговое усилие контакт, а сила, связанная с крутящим моментом, уравновешивает, в равновесии, осевую силу от чувствительного к крутящему моменту винта или подобного ему механизма. В этом примере выполнения изобретения давления, созданные клапанами A и B в цилиндрах 63 и 64, соответствуют только связанным с крутящим моментом силам. Силы зажима создаются отдельно, описание этого процесса следует. Нагнетание жидкости насосами 30,31 осуществляется по линии 72, подсоединенной к двум входным отверстиям клапана 73, который пропускает только большее в данный момент времени из давлений PA, PB, и отсекает меньшее. Выходная линия 74 проходит через клапан 75 понижения давления к цилиндрам 76, 77, установленным параллельно и содержащих поршни 78, 79 соответственно. Поршень 78 подпирает в осевом направлении одно желобочное колесо и передает на это желобочное колесо силу зажима. Таким же образом поршень 79 прикладывает силу зажима к другому желобочному колесу, при этом взаимосвязь между поршнями 65, 66, 78 и 79 будет объяснена со ссылкой на фиг. 6.
Прежде всего следует заметить, что из-за того, что цилиндры 76 и 77 установлены параллельно за, по ходу движения жидкости, клапаном 75 в этих цилиндрах существует одинаковое давление. И это, конечно, необходимо потому, что одинаковое тяговое усилие должно передаваться на оба желобочные колеса. Во-вторых, любое движение поршня 78 в одном направлении будет фактически сбалансировано движением поршня 79 в другом направлении и наоборот. Таким образом фактически вся жидкость, перемещенная из цилиндра 76, течет в цилиндр 77, и наоборот, таким образом уменьшается необходимость для насосов 30 и 31 приспосабливать потоки жидкости в зависимости от движений двух зажимающих поршней 78 и 79. Следует заметить так же, что только один из двух насосов питает цилиндры зажима в какой-либо момент времени. Все это позволяет использовать насосы меньшей мощности по сравнению с тем случаем, когда от цилиндров 63 и 64 требовалось вырабатывать и ответное крутящему моменту усилие и усилие зажима, как на предыдущих фигурах.
Если бы жидкость под давлением, превышающим выпускные давления насосов 30 и 31, подавалась напрямую (через клапан 73) в цилиндры 76 и 77, то в этом случае усилия зажима, создаваемые поршнями 78 и 79, были бы в общем случае очень велики. Клапан 75 осуществляет уменьшение давления с коэффициентом, по-существу пропорциональным значению мгновенного передаточного отношения вариатора, потому что сила зажима должна быть функцией тягового усилия на ремне, которое, в свою очередь является функцией крутящего момента и радиуса окружности контакта ремня с желобочным колесом, т.е. меры передаточного отношения. Давление, которое создает усилие зажима, пропорционально только крутящему моменту и, таким образом, должно видоизменяться мгновенным передаточным отношением для выработки желаемого усилия зажима. Для защиты контура от опасного увеличения гидравлического давления в результате какой-либо неисправности, в линиях 69 и 70 установлены обратные клапаны 71 для предохранения ответной крутящему моменту операции и такой же клапан 80, подсоединенный к клапану 73, для защиты операции зажима. Тем не менее, клапан 75 должен быть того типа, который возвращается в полностью открытое положение, передавая полное давление насоса к цилиндрам 76 и 77, для обеспечения беспрерывности передачи тягового усилия, даже к примеру в случае неисправности в центральном регулировочном механизме.
В режиме нормальной работы клапаны A и B будут обычно регулироваться центральным программируемым электронным блоком 17 управления, получающим (через 61,62 и 47) входные сигналы, указывающие на скорость транспортного средства и двигателя, выбор зубчатой передачи и другие относящиеся к делу параметры, и особенно от водителя через педаль 18 акселератора. Размещение выходных проходов 67 и 68 цилиндров в приподнятых уступах (67a и 68a), образованных на задних стенках соответствующих цилиндров, обеспечивает эффект "конечного стопора" как гарантию безопасности от неправильных действий, в соответствии со способами, хорошо известными в данной области техники. Если поршень 65 выходит за пределы своего нормального хода и подходит близко к уступу 67a, то увеличивается сопротивление выходного прохода, а с ним и давление жидкости в цилиндре 63, вплоть до максимальной регулировки обратного клапана 80, таким образом увеличивая сопротивление дальнейшему движению поршня за свои пределы.
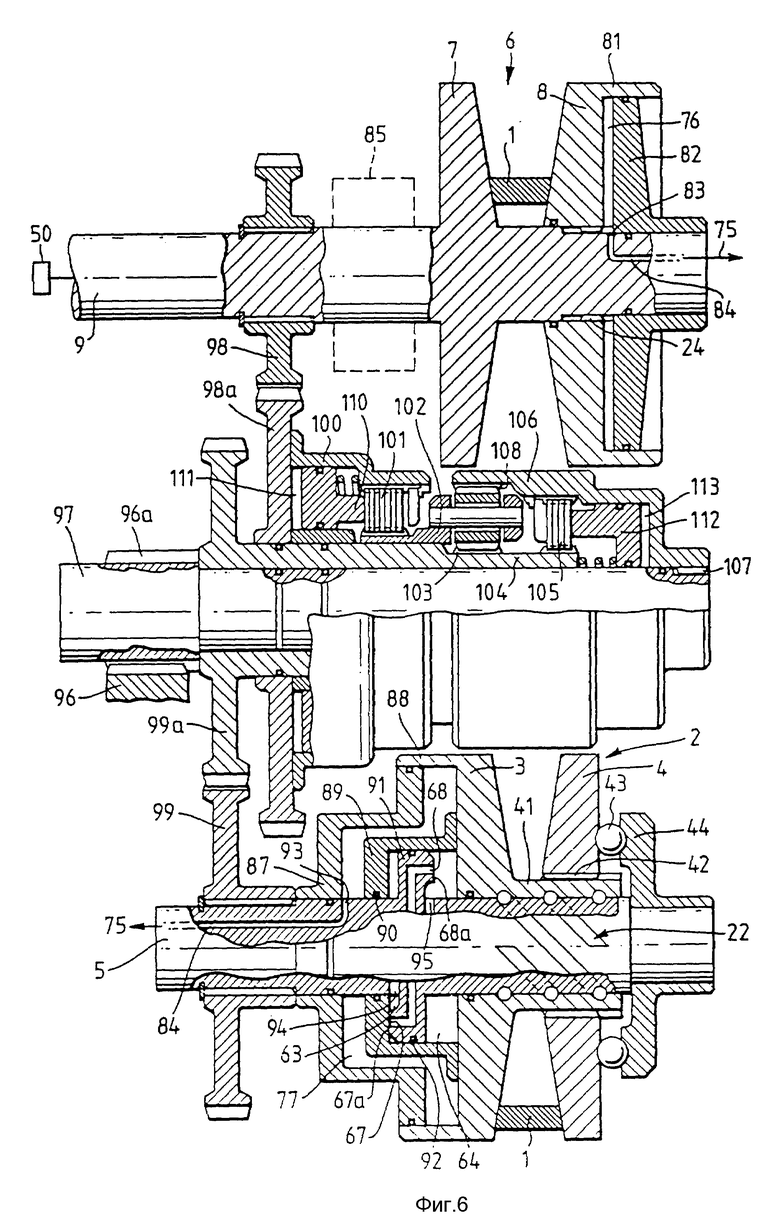
Фиг. 6 показывает БТ, в которой применен гидравлический контур, показанный на фиг. 5. Вариатор содержит узел 6 шкива, имеющий желобочные колеса 7 и 8, и узел 2 шкива, имеющий желобочные колеса 3 и 4. Ремень 1 передает движение от одного узла шкива на другой узел шкива. Желобочное колесо зафиксировано на валу 9, который в этой конструкции приводиться в действие первичным двигателем 50, а желобочное колесо установлено на валу 9 посредством шлицевого соединения 24, так что возможно ограниченное относительное осевое движение между валом и этим желобочным колесом. Желобочное колесо 8 несет фланец 81 с образованием кольцеобразного пространства переменного объема, ограниченного валом 9, желобочным колесом 8, фланцем 81 и круглой пластиной 82, установленной на валу. Сжимающее давление, действующее на узел 6 шкива, образуется в этом пространстве, которое таким образом согласуется с указанным цилиндром 76 на Фиг. 5 и которое сообщено через входной канал 83 и канал 84 с понижающим давление клапаном 75.
Желобочное колесо 3 другого узла 2 шкива соединено с валом 5 с помощью спиралеобразного шлица 22. Второе желобочное колесо 4 узла 2 установлено посредством шлицевого соединения 42 на втулочном удлинении 41 первого желобочного колеса 3, так чтобы два желобочных колеса 3, 4 могли двигаться в осевом направлении, но не могли вращаться один относительно другого. Шариковая упорная обойма, поддерживаемая фланцем 44, закрепленным на валу 5, ограничивает перемещение желобочного колеса 4 вправо, как это показано на фиг. 6. Как это видно на фиг. 4, спиралеобразный шлиц 22 обеспечивает направленную в оба конца чувствующую крутящий момент связь между узлом 2 шкива и валом 5: желобочные колеса 3, 4 будут стремиться разойтись, когда крутящий момент одно направление вращения, и сблизиться, когда он в другом направлении вращения. Ступенчатое кольцо 87 закреплено на валу 5 по его внутреннему ободу, и по его наружному ободу образует уплотненную скользящую посадку с фланцем 88, выполненном на желобочном колесе 3. Ступенчатое кольцо 89 меньшего размера закреплено на желобочном колесе 3 и образует с ним уплотненную скользящую посадку в позиции 90. Кольцо 91 установлено на валу 5 и внешний обод этого кольца образует уплотненную скользящую посадку 92 с внутренней стенкой кольца 89. Между ними вал 5, желобочное колесо 3 и кольца 87, 89 и 91 таким образом ограничивают три кольцеобразные камеры переменного объема. Эти камеры обозначены позициями 77, 63, и 64 на фиг. 6. Камера 77 сообщена через входной проход 93 и канал 84 с понижающим давление клапаном 75 и обеспечивает силу зажима. Канал 84 проходит в осевом направлении по валу 5, так же как и по валу 9. Жидкость поступает в цилиндры 63 и 64 из насосов 30,31, не показанных на фиг. 6, по проходам 94 и 95, соответственно, и далее она уходит по проходам 67 и 68, как это показано так же на фиг. 5. В конструкции, показанной на фиг. 6, эффективно, когда два цилиндра 63 и 64 имеют общую геометрическую ось и разделены зафиксированным кольцом 91, при этом расположенная с левой стороны поверхность кольца 89 становится поршнем 65, а левая поверхность желобочного колеса становится поршнем 66. Следует заметить, что на фиг. 6, так же как и на фиг. 5, проходы 67 и 68 образованы в ступенчатых поверхностях 67a, 68a соответственно, и таким образом они лежат по осям соответственных входных проходов 94 и 95 для обеспечения уже описанного эффекта ограничения движения в конечном положении.
В варианте осуществления, показанном на фиг. 6, вал 9 может удобно приводить в движение насосное устройство 85, показанное прерывистыми линиями и содержащее гидравлические насосы 30 и 31. Последнее ведущее зубчатое колесо 96 БТ находиться в зацеплении с зубчатым колесом 96a, установленным на третьем валу 97, при этом зубчатое колесо 98, установленное на валу 9, находится в зацеплении с зубчатым колесом 98a, так же имеющим с валом 97 общую геометрическую ось, а зубчатое колесо 99, установленное на валу 5, находится в зацеплении с зубчатым колесом 99a, также имеющем с валом 97 общую геометрическую ось. Рабочий диапазон вариатора, показанного на фиг. 6, расширен путем обеспечения его средствами работы в двух последовательных режимах, обозначенных как "низкий" и "высокий". Если принять, что вал 9 вращается с постоянной скоростью, то обычный низкий режим будет развиваться от состояния, в котором ремень 1 двигается от максимального к минимальному радиусу поперек узла 6 шкива (а в противоположном направлении - поперек узла 2), и в течение этого времени конечное ведущее колесо 96 начинает вращение с максимальной скорости в противоположном направлении, замедляет вращение до полной остановки (состояние, известное из уровня техники как "нейтральная скорость") и затем ускоряет вращение в прямом направлении до тех пор, пока ремень не займет положение с минимальным радиусом на узла 6 шкива. В этот момент одновременно приводятся в действие муфты (конструкции которых будут описаны) для отключения низкого режима и включения высокого, при этом передаточные отношения и размеры выбраны таким образом, что позволяют достичь того, что известно в данной области техники как "синхронное изменение", не включая мгновенного изменения передаваемого передаточного отношения. При высоком режиме ремень продвигается назад к максимальному радиусу на узле 6 шкива и к минимальному на узле 2, и конечное зубчатое колесо 96 продолжает ускоряться до своей окончательной, максимально ускоренной скорости.
Для достижения этих двух режимов зубчатое колесо 98 несет фланец 100, поддерживающий одну половину низкорежимной муфты 101, другая половина которой несет опору планетарной шестерни эпициклического зубчатого узла. Солнечное зубчатое колесо 103 этого узла установлено на трубчатом удлинении 104, поддерживаемом зубчатым колесом 99a, при этом и удлинение и зубчатое колесо установлено с возможностью вращения вокруг оси 97. Удлинение 105 также несет одну половину высокорежимной муфты 105, другая половина которой поддерживается фланцем 106, который закреплен на валу 97 в позиции 107 и которое так же несет кольцеобразное зубчатое колесо 108 эпициклического узла. При работе в низком режиме муфты 101 и 105 соответственно включаются и выключаются, и эпициклический узел смешивает входные сигналы от вала 9 (посредством опоры 102 планетарной шестерни) и вала 5 (посредством солнечного зубчатого колеса 103) для приведение в действие кольцеобразного зубчатого колеса и, таким образом, вал 97 и конечное ведущее зубчатое колесо 96. В точке "синхронного изменения" муфты 101 и 105 соответственно выключается и выключается, после чего прямая связь валов 9 и 97 посредством зубчатых колес 98,98а прерывается, и вал 97 приводится в движение напрямую только от вала 5 посредством зубчатых колес 99 и 99a, фланца 104, высокорежимной муфты 105 и фланца 106. Поршень и гидравлические цилиндры, используемые для приведения в действие муфты 101, 105, показаны под позициями 110, 111, и 112, 113 соответственно.
Следует заметить, что действие чувствительной к крутящему моменту связи между желобочным колесом и валом (например позиция 22 в примере на фиг. 6) в ответ на изменение команды заключается в эффекте поиска более низкой скорости вала, по которому передается энергия (позиция 5 на этой фигуре), по сравнению со скоростью вала (9), по которому энергия подается на вариатор. Другими словами ответ заключается в том, что вариатор стремиться найти значение передаточного отношения, которое уменьшает передаваемую энергию. Следует отметить и некоторые другие характеристики осуществления изобретения, показанные на фиг. 6. Прежде всего то, что две муфты (101, 105) и эпициклический узел установлены на отдельном от узлов 6 и 2 валу (97). Это сделано для того, чтобы получить трансмиссию с маленькими расстояниями между осями, пригодную для установки в транспортных средствах с поперечной установкой двигателя. Во-вторых, в принципе не имеет никакого значения, к какому из узлов 2,6 шкивов будет присоединена чувствительная к крутящему моменту связь (22). В-третьих, преимущество установки чувствительной к крутящему моменту связи 22 и всех связанных с ней гидравлических проходов и каналов на и в валу 5 заключается в том, что оба конца этого вала потенциально незагружены, при этом доступ для гидравлического соединения проще, чем по валу 9, у которого один конец подсоединен к первичному двигателю 50.
В примере, показанном на фиг. 7 и фиг. 8, ремень 1 передает тяговое усилие между узлом 2 шкива, установленным на валу 5, и узлом 6 шкива, установленном на валу 9. В этом примере вал 5 соединен с первичным двигателем 50, а вал 9 будет подсоединен обычным образом посредством дополнительных элементов, которые не показаны и не является частью настоящего изобретения, к последнему выходному зубчатому колесу 96 БТ, в котором одним из компонентов является вариатор. Узел 2 шкива содержит желобочное колесо 4, при этом спиралеобразная шариковая обойма 22 установлена между этим желобочным колесом и валом 5, и таким образом это желобочное колесо и вал способны совершать ограниченное относительное перемещение, содержащее как вращательную, так и осевую составляющую. Желобочное колесо 4 также установлено с возможностью двигаться в качестве поршня в пределах гидравлического цилиндра 15, сформированного корпусом, установленным на валу 5. Узел 2 шкива также содержит второе желобочное колесо 3, установленного в позиции 42 с помощью шлицевого соединения на втулке 41, выполненной на первом желобочном колесе 4. Деталь 42 позволяет относительно осевое перемещение между частями 3 и 41, но она уплотнена для предотвращения утечки жидкости через шлиц. Шариковая обойма 43, установленная на радиальном фланце 44, закрепленном на валу 5, позволяет желобочному колесу 3 вращаться вокруг вала, однако предотвращает его от относительного движения справа налево. Таким образом, пример, показанный на фиг. 7 в целом подобен примерам, показанным на предыдущих фигурах. Тем не менее, желобочное колесо 3 выполнено с выточкой 119 и радиальным фланцем 120, установленном на втулке 41, несущим уплотнение 121. Части 42, 41, 120, 121 и 119 взаимодействуют для определения границ второго гидравлического цилиндра 122.
Конструкция другого узла 6 шкива на выходном валу 9 такая же, но элементы расположены в обратном направлении, слева направо, и соответствующие элементы указаны одними и теми же ссылочными номерами, но с индексами ', т.е. первое и второе желобочные колеса 4' и 3'. Направление витков шариковых дорожек 22 и 22' выполнены таким образом, что когда энергия передается от вала 5 к валу 9, то направление витков спирали шариковой дорожки 22 стремиться создать силу, стремящуюся развести или, так сказать, переместить в осевом направлении в разные стороны желобочные колеса на валу 5, при этом направление витков спирали шариковой дорожки 22' стремится создать силу, стремящуюся свести желобочные колеса на валу 5. Если энергия перемещается в обратном направлении, направление действия сил также меняется на обратное. Прямые шлицы 42 и 42' создает возможность такого движения, но при этом предотвращает относительное вращательное движение между двумя желобочными колесами.
В контуре управления, показанном на фиг. 8 и 11, предусмотрены насосы 30 и 31, и центральный блок 17 управления, при этом клапаны А и В регулируют давления в цилиндрах, сближая желобочные колеса вместе. Эти давления рассчитываются таким образом, что перпендикулярная нагрузка на ремень (или цепь) была достаточна для предотвращения соскальзывания, но и не чрезмерна, и, таким образом, эти осевые силы, зависимые от крутящего момента, от шариковых винтов были сбалансированы алгебраически. Перпендикулярная нагрузка первоначально представляет собой коэффициент трения между ремнем и желобочным колесом и сумой входного и выходного крутящих моментов. Последнее значение может быть выражено как функция крутящего момента, значение которого под контролем, которое таким образом известно, и скоростное отношение вариатора (которое можно легко измерить). Таким образом оптимальная перпендикулярная нагрузка (сжимающая сила) может поддерживаться по всему рабочему диапазону.
Если желобочные колеса, по любой из причин, выйдут за пределы нормального рабочего диапазона, то в этом случае сработают "гидравлические стопоры", хорошо известные в данной области техники. Таким же образом, как это показано на фиг.5, выпускные линии 69, 70, выходящие из двух цилиндров 15 и 15', установлены в уступах 67a, 68a, которые соосны частям днищ, где впускные линии входят в цилиндры от насосов 30, 31 соответственно. По мере того как желобочное колесо приближается к одному из уступов 67a или 68a, перед тем, как оно фактически коснется этого уступа, оно закрывает выпускной проход и, таким образом, стремится увеличить сопротивление в соответствующей линии прохода жидкости, таким образом препятствуя дальнейшему продвижению желобочного колеса путем увеличения давления жидкости в цилиндре выше того значения, которое оно имело бы в случае, если бы оно определялось только соответствующим управляющим клапаном A или B.
Как это ясно показано на фиг.8 отдельные гидравлические цилиндры 15, 122; 15', 122' примера, описанного на фиг. 7 и 8, позволяют каждому источнику (30 и 31) энергии быть сообщенным напрямую и с "большим" или "зависящим от крутящего момента" цилиндром (15 и 15') одного узла шкива и с "маленьким" или "зажимающим" цилиндром (122' и 122) другого узла. Следует также заметить, что все еще желательно, чтобы перпендикулярная нагрузка на ремне была бы достаточно высока для предотвращения проскальзования, особенно когда гидравлический стопор увеличивает давление для противодействия перегрузке крутящего момента в вариаторе. Для обеспечения этого эффекта углы винтовой линии шариковых винтов должны быть выше определенного значения, установленного параметрами вариатора, в частности используемый коэффициент трения и, как в случае, показанном на фиг. 8, площади большого и маленького поршней.
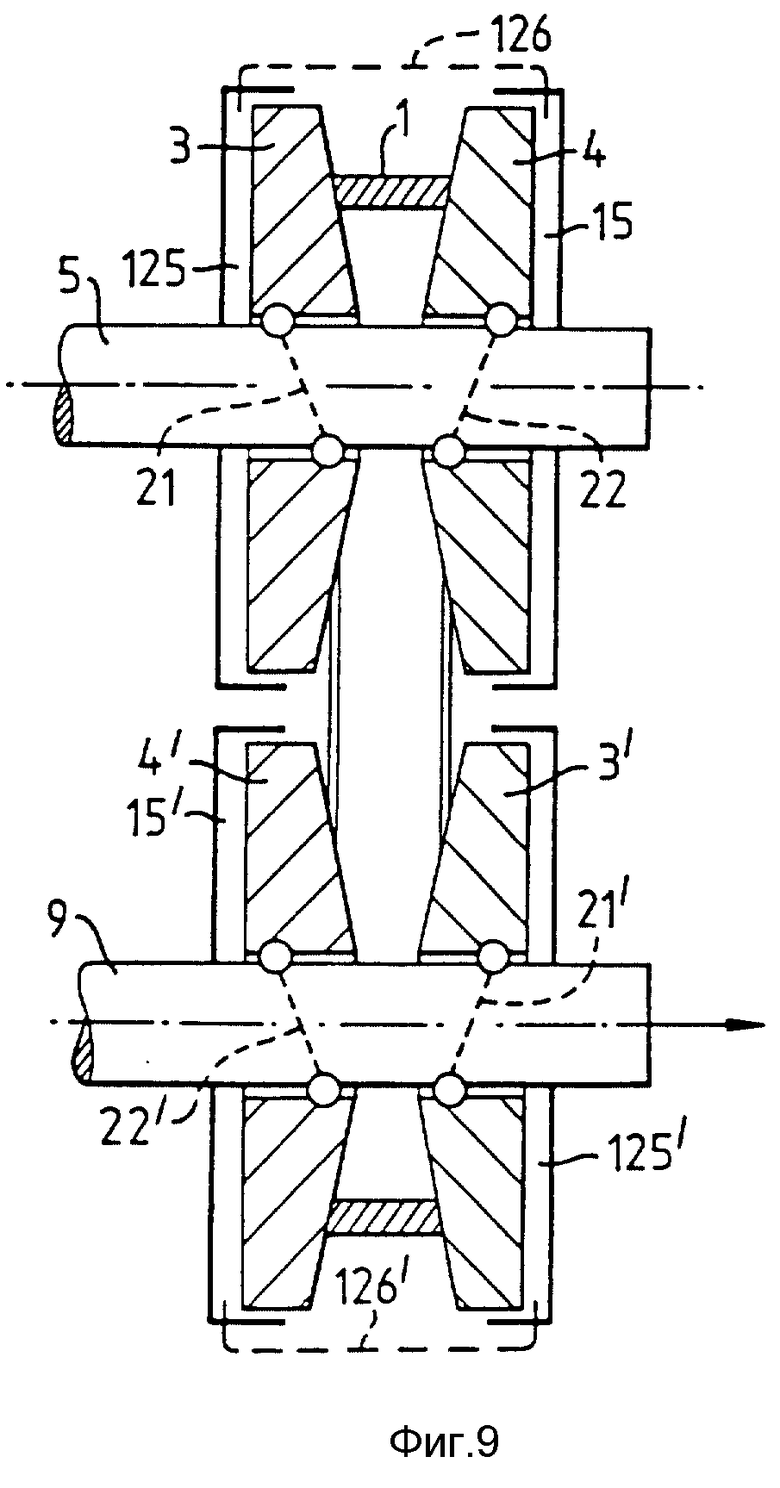
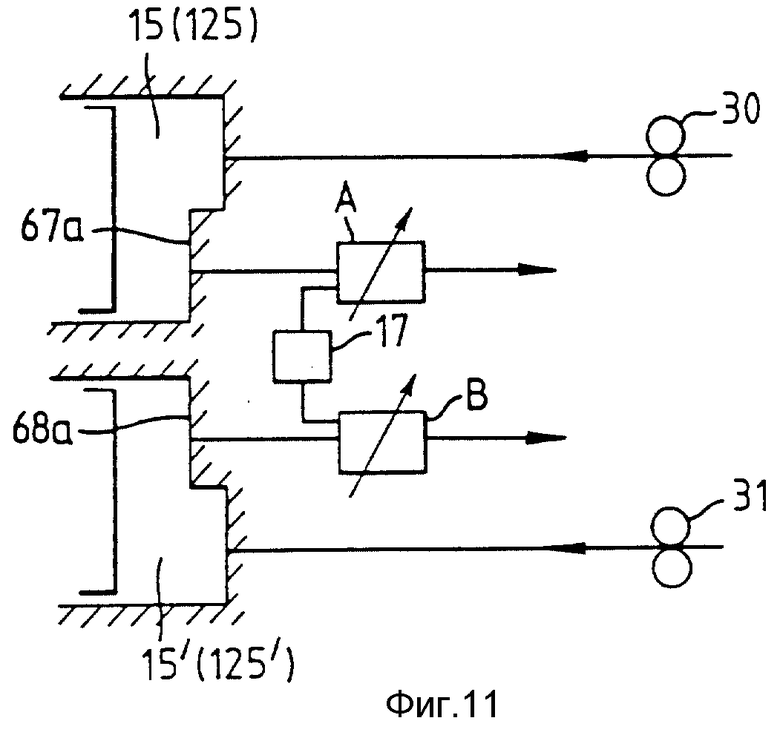
В примерах осуществления изобретения, описанных на фиг. 9 и 10, ссылочные номера, которые уже были использованы на фиг. 7, продолжают обозначать подобные элементы. Тем не менее, на фиг. 9 вместо того, что только одно желобочное колесо (4, 4') каждого узла шкива установлено на спиралеобразной шариковой дорожке (22, 22'), то теперь второе желобочное колесо (3, 3') в каждом узле так же установлено (так же, как и для узла 2 на фиг. 2) на такой же шариковой дорожке (21, 21'), при этом шариковые дорожки каждого узла имеют противоположные направления. Более того, цилиндры, показанные на фиг. 7, не предусмотрены и два желобочных колеса каждого узла по контуру идентичны, при этом желобочные колеса 3 и 3' действуют как поршни в пределах подобных корпусов, установленных на валах 5 и 9, при этом результирующие цилиндры 15 и 125, 15' и 125' гидравлически сообщены по линиям, обозначенным позициями 126 и 126'. В вариаторе, показанном на фиг.10, сходность с вариатором, показанном на фиг. 7, еще ближе, единственное существенное отличие заключается в том, что в нем не предусмотрены цилиндры 122 и 122'. Желобочные колеса 3 и 3' каждого узла таким образом имеют более простую форму, но все еще перемещаются по шлицам 42 и 42', установленным на втулках 41, 41', которые приводятся в движение желобочными колесами 4 и 4', при этом шариковые дорожки 43 и 43' предотвращают совершение желобочными колесами осевого перемещения в обратном направлении. В примере осуществления изобретения, показанном на фиг. 10, таким образом существует одно средство, при помощи которого осевая гидравлическая сила прикладывается к каждому из узлов шкивов, а именно посредством цилиндров 15 и 15' на желобочных колеса 4 и 4'. Для каждого варианта осуществления изобретения, показанного на фиг. 9 и 10, фиг. 11 показывает основные элементы гидравлического контура, содержащего, так же как и на фиг. 7, центральный запрограммированный блок 17 управления, два насоса 30 и 31, и два клапана A и B управления. Насос 30 и клапан А сообщены с цилиндром 15 (и, как это показано на фиг. 9, цилиндр 125 посредством связи 126) одного узла шкива, и насос 31 и клапан В сообщены с цилиндром 15' (и, как это показано на фиг.9, цилиндр 125' посредством связи 126') другого узла шкива. Хотя для простоты на фиг. 9 и 10 не показано, что цилиндры 15 и 15' могут, как это показано на фиг. 11, выполнены с ступенчатыми стопорами 67a и 68a для создания эффекта "конечного стопора", как это было уже объяснено со ссылками на фиг.8.
Фиг. 12 показывает пример осуществления изобретения согласно второму аспекту настоящего изобретения, в котором вариатор с регулируемым крутящим моментом, в основном такого же типа, как и тот, который показан на фиг. 6, просто и экономично адаптирован таким образом, чтобы создать возможность параллельной установки более чем одной комбинации узлов шкивов и ремня, на общем впускном и выпускном валах, и таким образом выровнять крутящие моменты на всех отдельных ремнях, но увеличивать общий крутящий момент, который может быть приложен к вариатору, и увеличить, таким образом, общее тянущее усилие, которое он может передавать. Хотя фиг. 6 показывает вариатор с двумя ремнями, ясно, что этот принцип может так же быть применен и к вариатору, у которого более чем два ремня. Как станет ясно из нижеследующего описания в вариаторе, показанном на фиг. 12, способы установки узлов шкивов на впускном и выпускном валах несходны: крепления шариковых дорожек зафиксированы на выпускном валу. Таким образом симметрия, существующая на фиг. 5, не показана, и, следовательно, гидравлический контур, сравнимый с тем, который показан на фиг. 8, не может быть использован.
На фиг. 12 вал 9, ведомый таким же образом, как и на фиг. 6, первичным двигателем 50, приводит в движение два ремня 1 посредством двух узлов 6 шкивов. Выпускные желобочные колеса 7 этих двух узлов зафиксированы на валу 9, в то время как впускные желобочные колеса 8 находятся в зацеплении с валом 24 посредством прямолинейных шлицев 24 и, таким образом, способны совершать ограниченное осевое перемещение. Цилиндр 76 с переменным объемом установлен между желобочным колесом 8 и валом 9, при этом он изолирован при помощи кольцеобразных уплотнений 127.
Ремни 1 находятся в зацеплении с узлами 2 шкивов на другом валу 5, который подсоединен, как и раньше, к конечной передаче 96. Выпускные желобочные колеса 4 этих узлов шкивов установлены на валу 5 посредством спиралеобразных шариковых дорожек 22 и выполнены с втулкообразными удлинениями 41, на которых установлены внутренние желобочные колеса 3 посредством прямолинейных шлицев 42. Внутренние желобочные колеса 3 предохранены от взаимного сближения посредством шариковых или роликовых дорожек 43, установленных на противоположных поверхностях фланца 44, установленного на валу 5. Каждый из выпускных валов 4 зафиксирован на профилированном кольце 89, которое образует уплотненную, скользящую посадку с валом 5 в позиции 90. Другое профилированное кольцо 87, которое образует с валом 5 со стороны своей внутренней опорной поверхности неподвижную и уплотненную посадку, образует уплотненную, но скользящую посадку со стороны своей внешней опорной поверхности, которая напротив наружных фланцев 88 колец 89. Уплотненные гидравлические цилиндры 77 с переменным объемом, выполненные с входным проходом 93, таким образом установлены между кольцами 89 и 87. Кольцеобразный элемент 91 по своему внутреннему радиусу образует с валом 5 уплотненную посадку, при этом по наружному радиусу образует уплотненную посадку напротив внутренних фланцев 129 колец 89. Таким образом, блоки и прилегающие элементы образуют уплотненные гидравлические цилиндры 63 и 64, 64a и 63a взаимно изменяющегося объема. Цилиндры 63 и 63a имеют входные проходы 94 для впуска жидкости, образованные в валу 5, цилиндры 64 и 64a так же имеют подобные впускные проходы 95, при этом элементы 91 образованы с выходными отверстиями 68 и 67, сообщающимися с цилиндрами 64 и 63a, соответственно.
Соответствующий подсоединенный гидравлический контур по существу показан на фиг. 5. Посредством каналов (не показанных), образованных в валу 5 насос 30 подает жидкость к цилиндру 63 (и 63a) через входные отверстия 94, при этом насос 31 подает жидкость к цилиндру 64 (и 64a) через входные отверстия 95, и выходные проходы 67, 68 от цилиндров подсоединены к дренажу 38 посредством клапанов A, B управления соответственно. Так же как это показано на фиг. 8 клапаны А и В настраиваются центральным программируемым электронным блоком 17 управления БТ таким образом, что равнодействующие сил, созданных давлениями в цилиндрах 64 и 64a, равны и каждая из них представляет "зависимый от крутящего момента" компонент общей осевой конечно-нагрузочной силы, приложенной на каждый из узлов 2 шкивов. Посредством клапана 73 (который выбирает для передачи более высокое из двух давлений давление) и третьего управляемого клапана 75 один или другой из насосов 30 и 31 также сообщен с цилиндрами 76 и 77 для оказания давления с соответствующей силой зажима между ремнем и желобочным колесом на узлах 6 шкивов, и сжимающий компонент общей осевой конечной нагрузки на узлы 2 шкивов. Следует отметить, что сжимающие силы на двух валах равны между собой, и они обеспечиваются одинаковым давлением в цилиндрах равной площади; "регуляторы крутящего момента" цилиндры 63 и 64, 64a и 63a не создают собственного усилия на этих валах, поскольку давления уравновешиваются силами от спиралеобразных шариковых дорожек 22.
Следует отметить, что входной вал 9 должен содержать только один гидравлический канал для подачи жидкости от клапана 75 в цилиндр 76 посредством входного отверстия 83, тогда как во входном валу 5 должно быть намного большее число гидравлических каналов для подачи жидкости во множество показанных проходов и каналов. В общем случае это выгодно, поскольку оба конца вала 5 являются потенциально свободными, давая возможность более легко обеспечить гидравлические связи, чем в случае вала 9, у которого один конец соединен с первичным двигателем 50.







Изобретение относится к бесступенчатым трансмиссиям типа полоса - желобочные колеса. Бесступенчатая трансмиссия содержит блок управления (17), управляемый оператором посредством педали (18) акселератора или другого органа управления, два узла шкивов, каждый из которых включает вал и два желобочных колеса, изменяющий передаточное отношение компонент в виде по меньшей мере одной полосы, находящейся в приводном контакте с двумя узлами шкивов, чувствительную к крутящему моменту связь, которая представляет собой шариковинтовое сцепление между по меньшей мере одним узлом шкива и его валом, средство для создания между ними осевой силы, которая представляет собой функцию величины и направления крутящего момента и передается узлом шкива, и нагрузочные средства. Бесступенчатая трансмиссия, выполненная таким образом, способна регулировать крутящий момент до такой степени, которая удовлетворяла бы требования, предъявляемые к современным транспортным средствам. 17 з.п.ф-лы, 12 ил.
Приоритет по пунктам:
20.12.93 по пп. 1 - 13, 16 и 18;
02.06.94 по пп.14 и 15;
26.08.94 по п.17.
| US 5173084 A, 22.09.92 | |||
| DE 4036683 A, 23.05.91 | |||
| СПОСОБ ПОЛУЧЕНИЯ ДИФТОРАМИНОАЛКАНОВ | 0 |
|
SU232979A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Бесступенчато-регулируемая коническая фрикционная передача | 1981 |
|
SU1722246A3 |

