Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству рекуперативного управления скоростью транспортного средства, которое увеличивает скорость вращения входного вала трансмиссии, с которым соединяется электромотор, посредством понижения передаточного числа бесступенчатой трансмиссии, когда существует запрос для увеличения величины рекуперации во время замедления.
Уровень техники
[0002] Традиционно, известно устройство управления гибридным транспортным средством, которое выполняет понижение передаточного числа, чтобы увеличивать передаточное отношение трансмиссии при выполнении рекуперативного управления, для того, чтобы улучшать рекуперативную эффективность (например, ссылка на патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Японская выложенная патентная заявка №2007-50866
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Однако в традиционном устройстве, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, и скорость вращения на входе трансмиссии уменьшается, уменьшение выполняется посредством повышения передаточного числа, в противоположность понижению передаточного числа, которое увеличивает скорость вращения на входе трансмиссии. Когда выполняется повышение передаточного числа, скорость вращения уменьшается с хорошей реакцией тем же образом, что и при понижении передаточного числа, и темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии увеличивается. Кроме того, если выполняется управление трансмиссией с обратной связью, при котором нижняя предельная скорость вращения (скорости вращения масляного насоса, который создает необходимое гидравлическое давление для трансмиссии) задается в качестве целевой скорости вращения, последующая реакция фактической скорости вращения на входе трансмиссии относительно командного значения скорости вращения на входе трансмиссии задерживается. Следовательно, существует проблема в том, что, при уменьшении скорости вращения на входе трансмиссии на основе запроса для уменьшения величины рекуперации, происходит провал, при котором фактическая скорость вращения на входе трансмиссии падает ниже нижней предельной скорости вращения.
[0005] Принимая во внимание проблемы, описанные выше, целью настоящего изобретения является предоставление устройства рекуперативного управления скоростью транспортного средства для пресечения провала, при котором скорость вращения на входе трансмиссии падает ниже нижней предельной скорости вращения, при уменьшении скорости вращения на входе трансмиссии на основе запроса для уменьшения в величине рекуперации во время рекуперативного управления скоростью.
Средство достижения цели
[0006] Для того чтобы добиваться вышеописанной цели, настоящее изобретение содержит бесступенчатую трансмиссию, электромотор, соединенный с входным валом бесступенчатой трансмиссии, и который регенерирует энергию во время замедления, и масляный насос, соединенный со стороной входного вала бесступенчатой трансмиссии, в котором скорость вращения для создания необходимого гидравлического давления для бесступенчатой трансмиссии во время замедления задается в качестве нижней предельной скорости вращения.
Это транспортное средство снабжается контроллером, который, когда существует запрос для увеличения в величине рекуперации во время замедления, выполняет рекуперативное управление скоростью для понижения передаточного числа бесступенчатой трансмиссии в сторону низкого передаточного отношения и увеличение скорости вращения входного вала трансмиссии, с которым соединяется электромотор.
Контроллер выполняет управление, чтобы делать темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии ниже темпа изменения увеличения скорости вращения для скорости вращения на входе трансмиссии, и скорость вращения на входе трансмиссии уменьшается на основе запроса для уменьшения в величине рекуперации во время рекуперативного управления скоростью.
Результаты изобретения
[0007] Следовательно, контроллер выполняет управление, чтобы делать темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии ниже темпа изменения увеличения скорости вращения для скорости вращения на входе трансмиссии, когда скорость вращения на входе трансмиссии уменьшается на основе запроса для уменьшения в величине рекуперации во время рекуперативного управления скоростью.
Т.е. при уменьшении скорости вращения на входе трансмиссии на основе запроса для уменьшения в величине рекуперации, уменьшение происходит с более пологим уклоном по сравнению с тем, когда происходит увеличение скорости вращения на входе трансмиссии, и достигает нижней предельной скорости вращения с углом раскрытия, который пересекает нижнюю предельную скорость вращения, формируя большой угол.
Следовательно, даже если существует задержка последующей реакции вследствие управления трансмиссией с обратной связью, представляется возможным пресекать провал, в котором фактическая скорость вращения на входе трансмиссии падает ниже нижней предельной скорости вращения.
Краткое описание чертежей
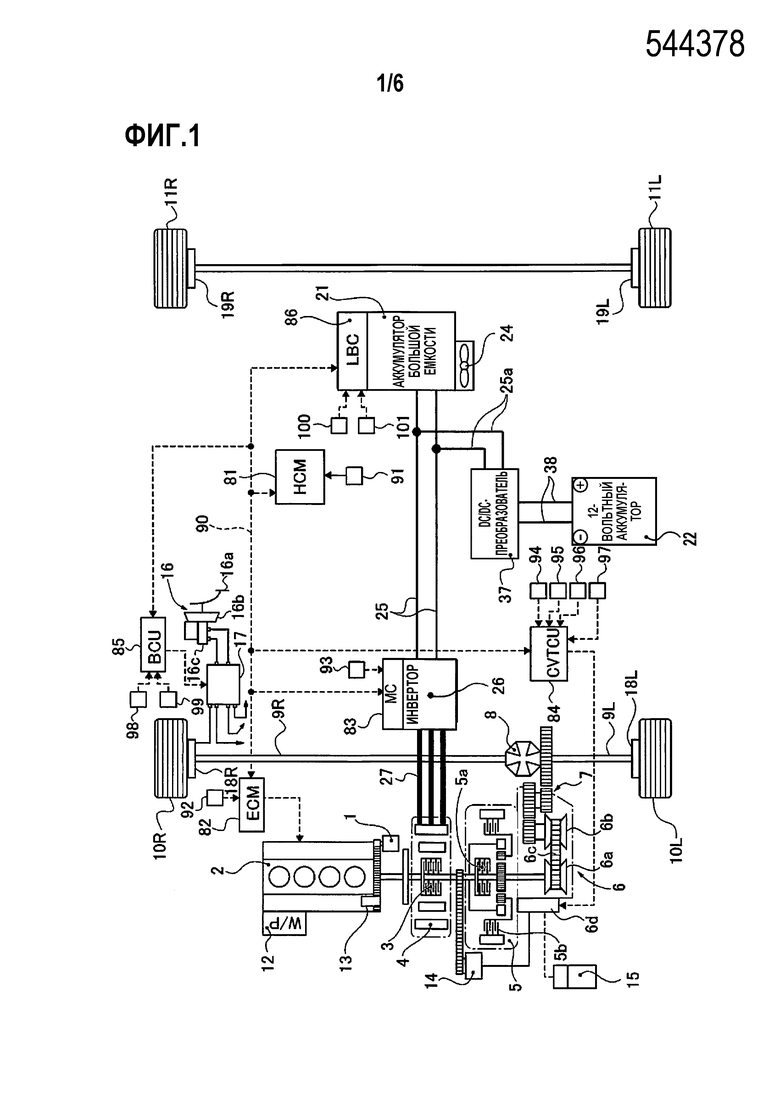
[0008] Фиг. 1 - это общий схематичный чертеж, иллюстрирующий FF-гибридное транспортное средство, к которому применяется устройство рекуперативного управления скоростью первого варианта осуществления.
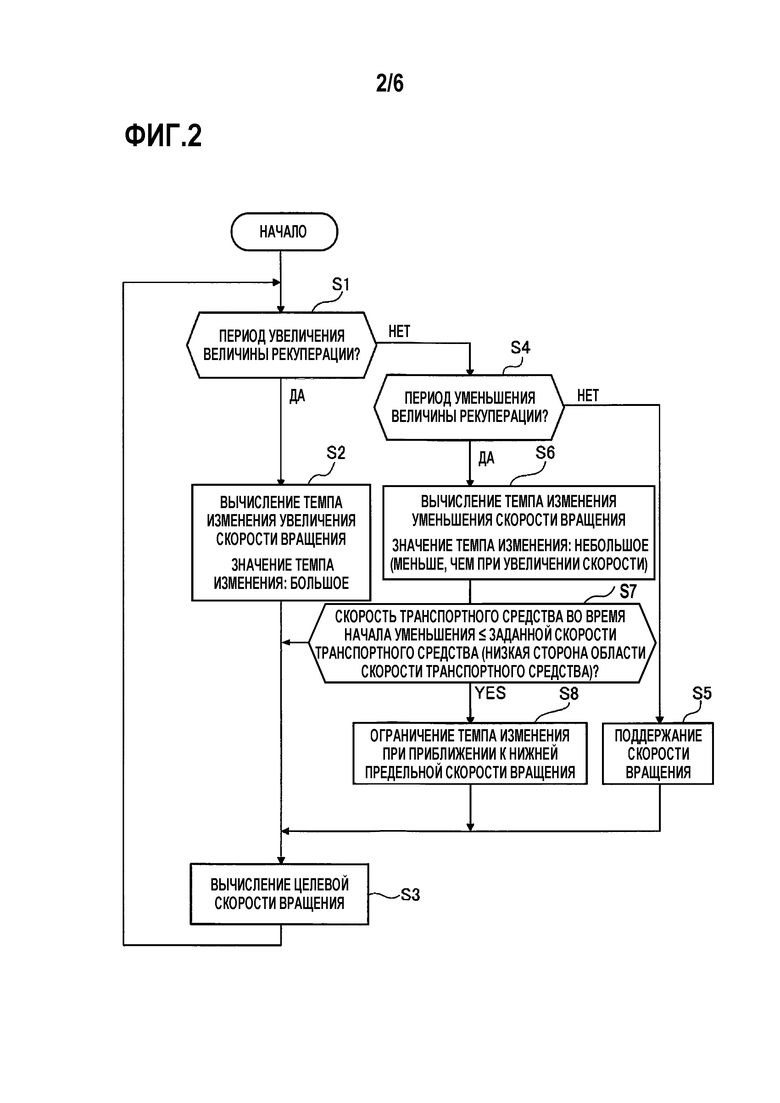
Фиг. 2 - это блок-схема, иллюстрирующая процесс для рекуперативного управления скоростью, выполняемый в модуле гибридного управления первого варианта осуществления.
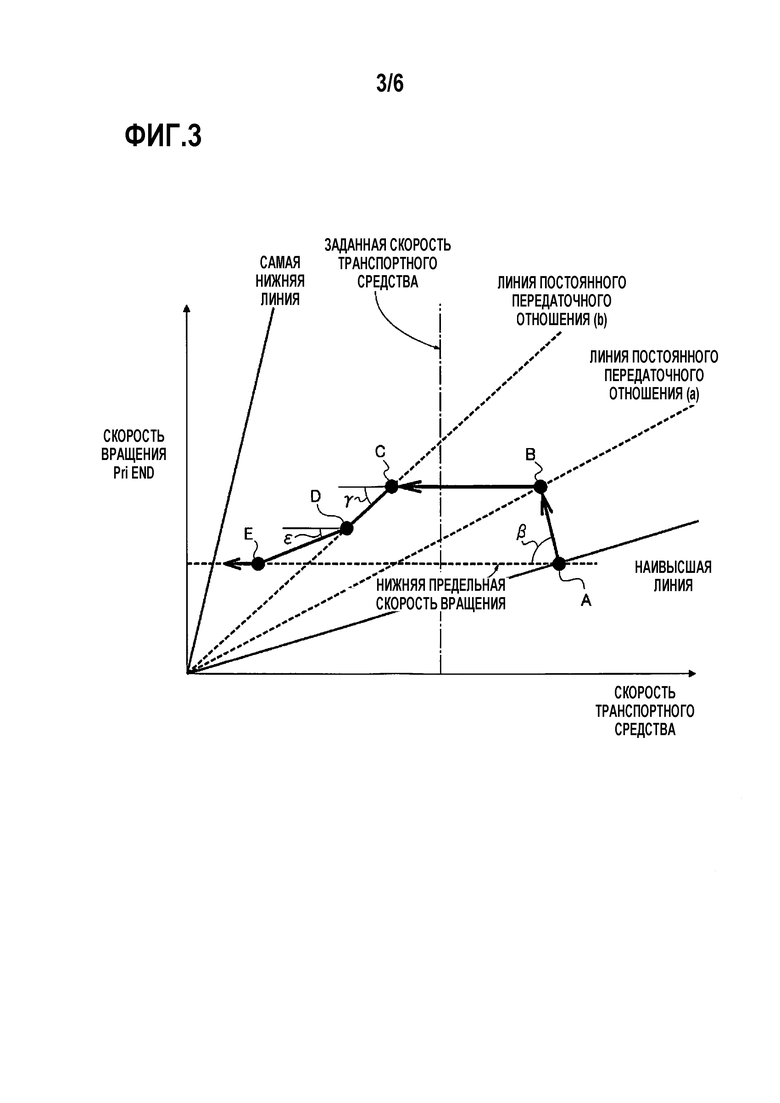
Фиг. 3 - это карта изменения передаточного числа, иллюстрирующая вычисленные значения темпа изменения увеличения скорости вращения и вычисленные значения темпа изменения уменьшения скорости вращения в процессе рекуперативного управления скоростью первого варианта осуществления.
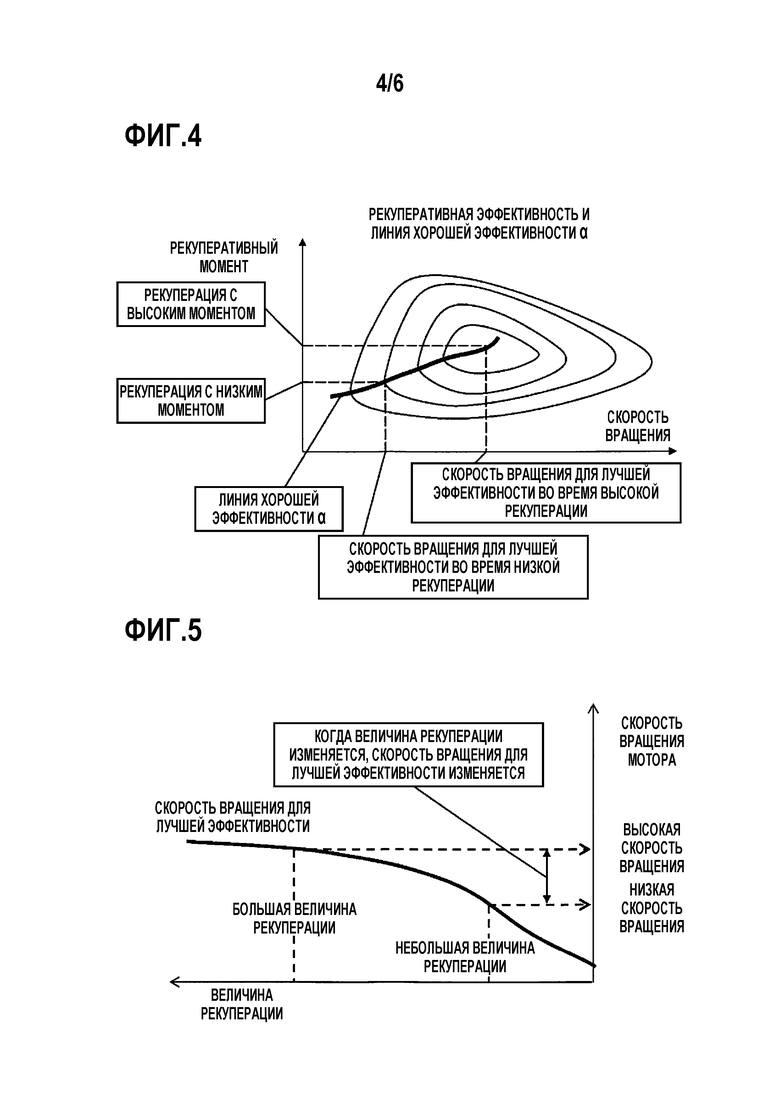
Фиг. 4 - это график характеристики, иллюстрирующий рекуперативную эффективность и линию хорошей топливной экономичности α, которая становится основной для определения соотношения между скоростью вращения и рекуперативным крутящим моментом во время рекуперации, и процесс рекуперативного управления скоростью первого варианта осуществления.
Фиг. 5 - это график относительной характеристики, иллюстрирующий соотношение между скоростью вращения мотора и величиной рекуперации посредством вращения с наилучшей эффективностью для вычисления целевой скорости вращения в процессе рекуперативного управления скоростью первого варианта осуществления.
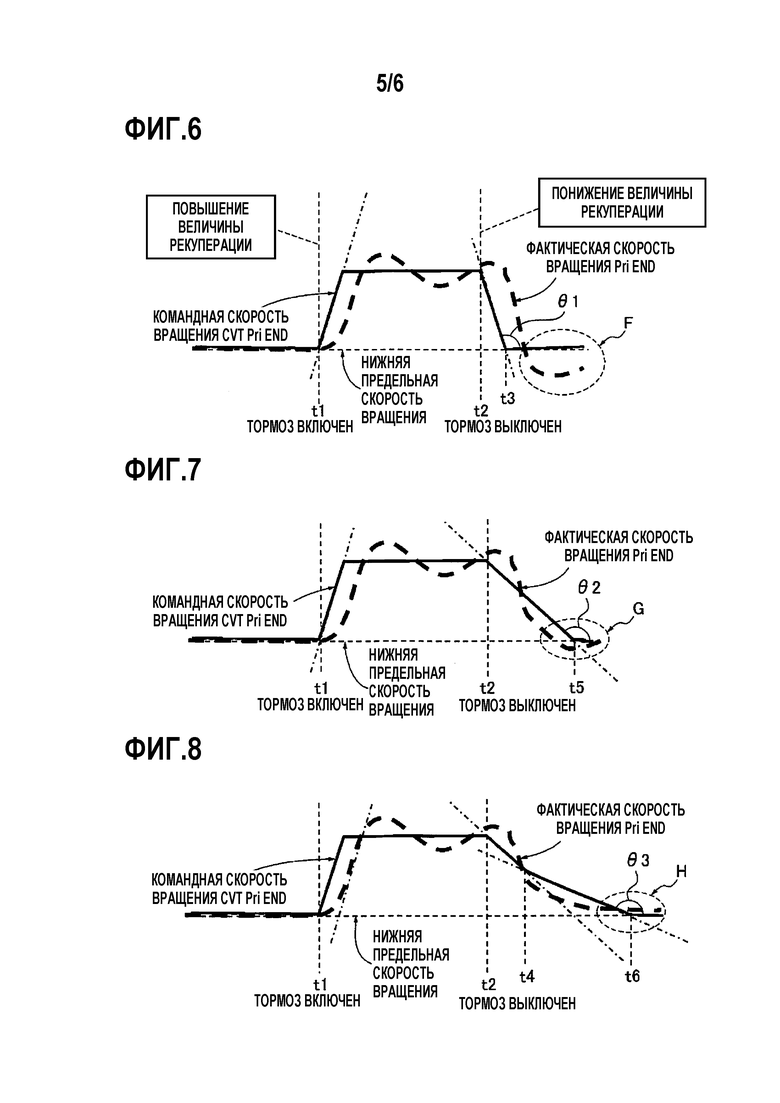
Фиг. 6 - это временная диаграмма, иллюстрирующая характеристику каждой из командной скорости вращения Pri end и фактической скорости вращения Pri end, относительно нижней предельной скорости вращения, когда увеличение величины рекуперации (повышение величины рекуперации) посредством понижения передаточного числа на основе операции нажатия тормоза, и уменьшение величины рекуперации (понижение величины рекуперации) посредством повышения передаточного числа на основе операции возврата тормоза, выполняются в процессе рекуперативного управления скоростью сравнительного примера.
Фиг. 7 - это временная диаграмма, иллюстрирующая характеристику каждой из командной скорости вращения Pri end и фактической скорости вращения Pri end, относительно нижней предельной скорости вращения, когда увеличение величины рекуперации (повышение величины рекуперации) посредством понижения передаточного числа на основе операции нажатия тормоза, и уменьшение величины рекуперации (понижение величины рекуперации) вдоль линии постоянного передаточного отношения на основе операции возврата тормоза, выполняются в процессе рекуперативного управления скоростью первого варианта осуществления.
Фиг. 8 - это временная диаграмма, иллюстрирующая характеристику каждой из командной скорости вращения Pri end и фактической скорости вращения Pri end, относительно нижней предельной скорости вращения, когда увеличение величины рекуперации (повышение величины рекуперации) посредством понижения передаточного числа, и уменьшение величины рекуперации (понижение величины рекуперации) вдоль линии постоянного передаточного отношения и линии понижения передаточного числа на основе операции возврата тормоза, выполняются в процессе рекуперативного управления скоростью первого варианта осуществления.
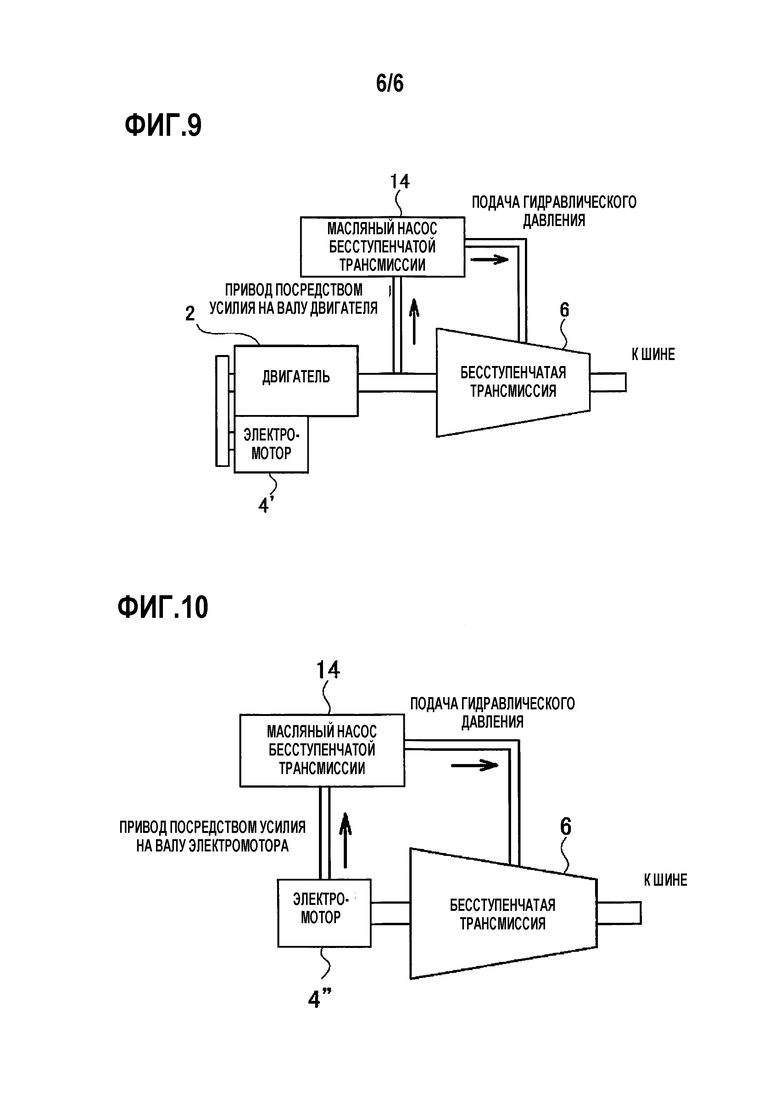
Фиг. 9 - это схематичный чертеж, иллюстрирующий пример системы приведения в движение оборудованного двигателем транспортного средства, к которому может быть применено рекуперативное управление скоростью настоящего изобретения.
Фиг. 10 - это чертеж в схематичном виде, иллюстрирующий пример системы приведения в движение электрического транспортного средства, к которому может быть применено рекуперативное управление скоростью настоящего изобретения.
Варианты осуществления для выполнения изобретения
[0009] Предпочтительный вариант осуществления для реализации устройства рекуперативного управления скоростью транспортного средства настоящего изобретения описывается ниже на основе первого варианта осуществления, иллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация.
Устройство рекуперативного управления скоростью согласно первому варианту осуществления применяется к FF-гибридному транспортному средству (один пример транспортного средства), имеющему левое и правое передние колеса в качестве ведущих колес и имеющему бесступенчатую трансмиссию ременного типа. "Общая конфигурация системы" и "конфигурация процесса рекуперативного управления скоростью" будут отдельно описаны относительно конфигурации устройства рекуперативного управления скоростью для FF-гибридных транспортных средств в первом варианте осуществления.
[0011] [Общая конфигурация системы]
Фиг. 1 иллюстрирует общий вид системы FF-гибридного транспортного средства, к которому применяется устройство рекуперативного управления скоростью первого варианта осуществления. Общая конфигурация системы FF-гибридного транспортного средства будет описана ниже на основе фиг. 1.
[0012] Система приведения в движение FF-гибридного транспортного средства снабжается поперечно расположенным двигателем 2, первой муфтой 3 сцепления (обозначенной аббревиатурой "CL1"), мотор-генератором 4 (обозначенным аббревиатурой "MG"), второй муфтой 5 сцепления (обозначенной аббревиатурой "CL2") и бесступенчатой трансмиссией 6 ременного типа (обозначенной аббревиатурой "CVT"), как иллюстрировано на фиг. 1. Выходной вал бесступенчатой трансмиссии 6 ременного типа соединяется с возможностью передачи приводного усилия с левым и правым передними колесами 10R и 10L, через механизм 7 конечной понижающей передачи, дифференциальную передачу 8 и левый и правый приводные валы 9R и 9L. Левое и правое задние колеса 11R, 11L конфигурируются в качестве ведомых колес.
[0013] Поперечно расположенный двигатель 2 является двигателем, расположенным с находящимся впереди стартерным мотором 1 и направлением коленчатого вала в поперечном направлении транспортного средства, содержащим электрический водяной насос 12 и датчик 13 вращения коленчатого вала, который обнаруживает обратное вращение поперечно расположенного двигателя 2. Поперечно расположенный двигатель 2 содержит, в качестве способов запуска двигателя, "режим MG-запуска", который выполняет проворачивание коленчатого вала посредством мотор-генератора 4, в то же время зацепляя с проскальзыванием первую муфту 3 сцепления, и "режим запуска от стартера", который выполняет проворачивание коленчатого вала посредством стартерного мотора 1, который имеет 12-вольтный аккумулятор 22 в качестве источника питания. "Режим запуска от стартера" выбирается, только когда удовлетворяются ограниченные условия, такие как очень низкие температурные условия.
[0014] Мотор-генератор 4 является трехфазным синхронным мотором переменного тока с постоянными магнитами, соединенным с поперечно расположенным двигателем 2 через первую муфту 3 сцепления. Мотор-генератор 4 использует аккумулятор 21 большой емкости, описанный позже, в качестве источника питания, и инвертор 26, который преобразует постоянный ток в трехфазный переменный ток во время снабжения энергией и преобразует трехфазный переменный ток в постоянный ток во время рекуперации, соединяется с катушкой статора через AC-проводку 27. Первая муфта 3 сцепления, вставленная между поперечно расположенным двигателем 2 и мотор-генератором 4, является приводимой в действие гидравлическим образом сухой или мокрой многодисковой муфтой, в которой полное зацепление/зацепление с проскальзыванием/расцепление управляются посредством гидравлического давления первой муфты.
[0015] Вторая муфта 5 сцепления является приводимой в действие гидравлическим образом сухой многодисковой фрикционной муфтой, вставленной между мотор-генератором 4 и левым и правым передними колесами 10R и 10L, которые являются ведущими колесами, в которой полное зацепление/зацепление с проскальзыванием/расцепление управляются посредством гидравлического давления второй муфты. Вторая муфта 5 сцепления в первом варианте осуществления конфигурируется посредством отведения муфты 5a переднего хода и обратного тормоза 5b, предусмотренного в механизме прямого/обратного переключения, сконфигурированного посредством планетарных шестерней. Т.е. муфта 5a переднего хода используется в качестве второй муфты 5 сцепления во время движения передним ходом, а обратный тормоз 5b используется в качестве второй муфты 5 сцепления во время движения задним ходом.
[0016] Бесступенчатая трансмиссия 6 ременного типа содержит первичный шкив 6a, вторичный шкив 6b и ремень 6c, который обмотан вокруг двух шкивов 6a и 6b. Кроме того, эта бесступенчатая трансмиссия является трансмиссией, которая добивается бесступенчатого передаточного отношения трансмиссии посредством изменения диаметра намотки ремня 6c посредством первичного давления и вторичного давления, которые подаются в первичную масляную камеру и вторичную масляную камеру. Бесступенчатая трансмиссия 6 ременного типа содержит, в качестве гидравлических источников энергии, главный масляный насос 14 (механический привод), вращательным образом приводимый в действие валом мотора мотор-генератора 4 (=входной вал трансмиссии), и вспомогательный масляный насос 15 (привод мотора), который используется в качестве вспомогательного насоса. Бесступенчатая трансмиссия содержит блок 6d клапана управления, который использует линейное давление PL, создаваемое посредством регулирования давления на выходе насоса от гидравлического источника энергии, в качестве исходного давления, чтобы создавать давление первой муфты, давление второй муфты, а также первичное давление и вторичное давление бесступенчатой трансмиссии 6 ременного типа. Масляный насос, который является целью для нижней предельной скорости вращения первого варианта осуществления, является главным масляным насосом 14, который вращательным образом приводится в действие посредством мотор-генератора 4 (электрического мотора), установленного в качестве источника приведения в движение для движения.
[0017] Первая муфта 3 сцепления, мотор-генератор 4 и вторая муфта 5 сцепления конфигурируют так называемую гибридную систему приведения в движение с одним мотором и двумя муфтами сцепления, имеющую, в качестве основных режимов приведения в движение, "EV-режим", "HEV-режим" и "WSC-режим".
"EV-режим" является режимом электрического транспортного средства, в котором первая муфта 3 сцепления расцеплена, а вторая муфта 5 сцепления сцеплена, и в котором мотор-генератор 4 является единственным источником приведения в движение; движение посредством такого "EV-режима" называется "EV-движением". "HEV-режим" является режимом гибридного транспортного средства, в котором обе муфты 3 и 5 зацеплены и в котором поперечно расположенный двигатель 2 и мотор-генератор 4 являются источниками приведения в движение; движение посредством "HEV-режима" называется "HEV-движением". "WSC-режим" является режимом зацепления с проскальзыванием для CL2, в котором скорость вращения мотора мотор-генератора 4 управляется в "HEV-режиме" или "EV-режиме", и вторая муфта 5 сцепления зацепляется с проскальзыванием с перегрузочной способностью по моменту зацепления, соответствующей требуемой движущей силе. Когда транспортное средство останавливается, устанавливая "WSC-режим", в котором вторая муфта 5 сцепления сцепляется с проскальзыванием, представляется возможным вращать мотор-генератор 4.
[0018] Тормозная система FF-гибридного транспортного средства содержит блок 16 приведения в действие тормоза, блок 17 управления давлением тормозной жидкости, блоки 18R и 18L тормозов левого и правого передних колес, блоки 19R и 19L тормозов левого и правого задних колес, как иллюстрировано на фиг. 1. В тормозной системе, когда мотор-генератор 4 выполняет рекуперацию во время операции торможения, совместное рекуперативное управление выполняется относительно запрошенного тормозного усилия на основе задействования педали, в соответствии с чем, фрагмент, полученный вычитанием рекуперативного тормозного усилия из требуемого тормозного усилия, распределяется гидравлическому тормозному усилию.
[0019] Блок 16 приведения в действие тормоза содержит педаль 16a тормоза, усилитель 16b отрицательного давления, который использует отрицательное давление на впуске поперечно расположенного двигателя 2, и главный цилиндр 16c и т.п. Этот блок 16 рекуперативного совместного торможения формирует предварительно определенное давление главного цилиндра согласно силе нажатия на педаль тормоза от водителя, которая прикладывается к педали 16a тормоза, и является просто сконфигурированным блоком, который не использует электрический усилитель.
[0020] Блок 17 управления давлением тормозной жидкости содержит, в то время как не показано, электрический масляный насос, соленоидный клапан для повышения давления, соленоидный клапан для понижения давления, клапан для переключения масляного канала и т.п. Посредством управления для блока 17 управления давлением тормозной жидкости посредством блока 85 управления тормозом 85 вызываются функция формирования гидравлического давления колесного цилиндра, когда тормоз не задействуется, и функция регулировки гидравлического давления колесного цилиндра, когда тормоз задействуется. Примеры управлений, которые используют функцию создания гидравлического давления, когда тормоз не задействуется, включают в себя регулирование тягового усилия (TCS-регулирование), управление поведением транспортного средства (VDC-управление), управление аварийным тормозом (автоматическое управление тормозом) и т.п. Примеры управлений, которые используют функцию регулировки гидравлического давления во время операции торможения, включают в себя совместное рекуперативное управление, антиблокировочное управление тормозом (ABS-управление) и т.п.
[0021] Тормозные блоки 18R и 18L левого и правого передних колес соответственно предусматриваются на левом и правом передних колесах 10R и 10L, и тормозные блоки 19R и 19L левого и правого задних колес соответственно предусматриваются на левом и правом задних колесах 11R и 11L и прикладывают гидравлическое тормозное усилие к каждому из колес. Тормозные блоки 18R, 18L, 19R и 19L снабжаются колесными цилиндрами, которые не показаны, к которым подается давление тормозной жидкости, создаваемое блоком 17 управления давлением тормозной жидкости.
[0022] Система подачи энергии FF-гибридного транспортного средства снабжается аккумулятором 21 большой емкости в качестве источника питания мотор-генератора 4, и 12-вольтным аккумулятором 22 в качестве источника питания нагрузки системы 12В, как иллюстрировано на фиг. 1.
[0023] Аккумулятор 21 высокой емкости является аккумуляторной батарей, которая устанавливается в качестве источника питания мотор-генератора 4, и, например, литиево-ионный аккумулятор, в котором модуль гальванического элемента, сконфигурированный с помощью многочисленных элементов, устанавливается внутри корпуса аккумуляторной батареи, используется для этого. Распределительная коробка, которая собирает в одно целое релейную схему для выполнения подачи/отсечки/распределения большого тока, встраивается в аккумулятор 21 большой емкости, и к нему дополнительно присоединяется блок 24 охлаждающего вентилятора, имеющий функцию охлаждения аккумулятора, и контроллер 86 литиевого аккумулятора, который наблюдает за состоянием заряда аккумулятора (SOC аккумулятора) и температурой аккумулятора.
[0024] Аккумулятор 21 большой емкости и мотор-генератор 4 соединяются с DC-электропроводкой 25 и инвертором 26 через AC-электропроводку 27. Контроллер 83 мотора для выполнения управления снабжением энергией/рекуперацией присоединяется к инвертору 26. Т.е. инвертор 26 преобразует постоянный ток от DC-электропроводки 25 в трехфазный переменный ток для AC-электропроводки 27 во время снабжения электроэнергией, когда мотор-генератор 4 приводится в действие посредством разряда аккумулятора 21 большой емкости. Кроме того, инвертор преобразует трехфазный переменный ток из AC-электропроводки 27 в постоянный ток для DC-электропроводки 25, во время рекуперации для зарядки аккумулятора 21 большой емкости с выработкой энергии посредством мотор-генератора 4.
[0025] 12-вольтный аккумулятор 22 является аккумуляторной батареей, установленной в качестве источника питания для нагрузки системы в 12В, включающей в себя стартерный мотор и вспомогательные механизмы; например, используется свинцовый аккумулятор, установленный на транспортном средстве с двигателем внутреннего сгорания или т.п. Аккумулятор 21 большой емкости и 12-вольтный аккумулятор 22 соединяются с DC-ветвью электропроводки 25a, DC/DC-преобразователем 37 и электропроводкой 38 аккумулятора. DC/DC-преобразователь 37 преобразует несколько сотен вольт от аккумулятора 21 большой емкости в 12В, который конфигурируется, чтобы управлять величиной заряда 12-вольтного аккумулятора 22 посредством управления DC/DC-преобразователем 37 с помощью модуля 81 гибридного управления.
[0026] Электронная система управления FF-гибридного транспортного средства содержит модуль 81 гибридного управления (обозначенный аббревиатурой "HCM") в качестве электронного блока управления, который имеет интегрированную функцию управления, чтобы соответствующим образом управлять потреблением энергии всего транспортного средства, как иллюстрировано на фиг. 1. Модуль 82 управления двигателем (обозначенный аббревиатурой "ECM"), контроллер 83 мотора (обозначенный аббревиатурой "MC") и блок 84 управления CVT (обозначенный аббревиатурой "CVTCU") предусматриваются в качестве других электронных блоков управления. Кроме того, предусматриваются блок 85 управления тормозом (обозначенный аббревиатурой "BCU") и контроллер 86 литиевого аккумулятора (обозначенный аббревиатурой "LBC"). Эти электронные блоки 81, 82, 83, 84, 85 и 86 управления соединяются так, чтобы иметь способность обмениваться двухсторонней информацией посредством линии 90 связи локальной сети контроллеров ("CAN") и совместно использовать информацию друг с другом.
[0027] Модуль 81 гибридного управления выполняет различные встроенные управления на основе входной информации от других электронных блоков 82, 83, 84, 85 и 86 управления и переключателя 91 зажигания и т.п.
[0028] Модуль 82 управления двигателем получает входную информацию от модуля 81 гибридного управления, датчика 92 скорости вращения двигателя и т.п. Модуль управления двигателем выполняет управление запуском, управление впрыском топлива, управление зажиганием, управление прекращением подачи топлива, управление вращением на холостом ходу двигателя и т.д. для поперечно расположенного двигателя 2 на основе этих частей входной информации.
[0029] Контроллер 83 мотора получает входную информацию от модуля 81 гибридного управления, датчика 93 скорости вращения мотора и т.п. Контроллер мотора выполняет управление холостым ходом мотора, управление медленным вращением мотора, управление рекуперацией и управление снабжением электропитанием мотор-генератора 4, согласно командам управления для инвертора 26, на основе этих битов входной информации.
[0030] Блок 84 управления CVT получает входную информацию от модуля 81 гибридного управления, датчика 94 величины открытия позиции акселератора, датчика 95 скорости транспортного средства, переключателя 96 замедления, датчика 97 температуры масла ATF и т.п. Блок управления CVT выполняет управление гидравлическим давлением зацепления для первой муфты 3 сцепления, управление гидравлическим давлением зацепления для второй муфты 5 сцепления, управление гидравлическим давлением изменения передаточного числа бесступенчатой трансмиссии 6 ременного типа посредством первичного давления и вторичного давления, и т.п., выводя команды управления блоку 6d клапана управления на основе этих битов входной информации.
[0031] Блок 85 управления тормозом получает входную информацию от модуля 81 гибридного управления, переключателя 98 тормоза, датчика 99 хода тормоза и т.п. Блок управления тормозом выводит команды управления блоку 17 управления давлением тормозной жидкости на основе этих битов входной информации. Блок 85 управления тормозом выполняет TCS-управление, VDC-управление, автоматическое управление тормозом, совместное рекуперативное управление, ABS-управление и т.п.
[0032] Контроллер 86 литиевого аккумулятора управляет SOC аккумулятора, температурой аккумулятора и т.п. для аккумулятора 21 большой емкости на основе входной информации от датчика 100 напряжения аккумулятора, датчика 101 температуры аккумулятора и т.п.
[0033] [Конфигурация процесса рекуперативного управления скоростью]
Фиг. 2 иллюстрирует последовательность операций процесса рекуперативного управления скоростью, который выполняется посредством модуля 81 гибридного управления (контроллера) согласно первому варианту осуществления. Каждый этап на фиг. 2, показывающий конфигурацию процесса рекуперативного управления скоростью, который начинается на основе запроса для увеличения величины рекуперации посредством операции нажатия тормоза, и заканчивается, когда командная скорость вращения Pri end (= командному значению скорости вращения на входе трансмиссии) достигает нижней предельной скорости вращения посредством уменьшения командного значения на основе запроса для уменьшения величины рекуперации посредством операции возврата тормоза, будет описан ниже.
[0034] На этапе S1 определяется, является или нет период периодом увеличения величины рекуперации для увеличения командной скорости вращения Pri end бесступенчатой трансмиссии 6 ременного типа, на основе запроса для увеличения величины рекуперации посредством операции нажатия тормоза. Если Да (это - период увеличения величины рекуперации), процесс переходит к этапу S2, а если Нет (это - не период увеличения величины рекуперации), процесс переходит к этапу S4.
Здесь, "запрос для увеличения величины рекуперации" выдается посредством операции нажатия тормоза, выполняемой с намерением замедляться, когда скорость вращения мотор-генератора 4 и главного масляного насоса 14 устанавливаются в нижнюю предельную скорость вращения, в движении по инерции, вызванном отпусканием педали акселератора. Кроме того, "период увеличения величины рекуперации" ссылается на период, в котором, когда существует запрос для увеличения величины рекуперации, начинается понижение передаточного числа бесступенчатой трансмиссии 6 ременного типа, и командная скорость вращения Pri end увеличивается до целевой скорости вращения, которая определяется по лучшей рекуперативной эффективности.
[0035] На этапе S2, следом за определением на этапе S1, что это - период увеличения величины рекуперации, вычисляется темп изменения увеличения скорости вращения Pri end посредством понижения передаточного числа бесступенчатой трансмиссии 6 ременного типа (значение темпа изменения: большое), и процесс переходит к этапу S3.
Здесь, "темп изменения увеличения скорости вращения Pri end" предоставляется в качестве темпа изменения увеличения, когда скорость понижения передаточного числа бесступенчатой трансмиссии 6 ременного типа посредством гидравлического давления в это время является максимальной скоростью трансмиссии. Например, на фиг. 3, когда рабочая точка (VSP, APO), во время, когда выдается запрос для увеличения величины рекуперации, является точкой A на наивысшей линии, увеличение вызывается быстро от точки A до точки B, достигая целевой скорости вращения, с большим значением β темпа изменения для быстрого увеличения командной скорости вращения Pri end. Впрочем, "целевая скорость вращения" определяется по лучшей рекуперативной эффективности. Кроме того, задавая "темп изменения увеличения скорости вращения Pri end" в большое значение β темпа изменения, некоторая степень перерегулирования возникает в фактической скорости вращения Pri end в области достижения точки B; однако в отличие от случая недорегулирования, перерегулирование не ведет к недостатку количества масла и т.д. и, таким образом, разрешается.
[0036] На этапе S3, следом за вычислением темпа изменения увеличения скорости вращения на этапе S2, вычисляется целевая скорость вращения для скорости вращения Pri end, и процесс возвращается к этапу S1.
Здесь, "целевая скорость вращения в периоде увеличения величины рекуперации" должна быть скоростью вращения Pri end, с которой целевая величина рекуперации получается согласно лучшей рекуперативной эффективности, когда максимальная величина рекуперации относительно запроса замедления от водителя посредством операции нажатия тормоза задается в качестве целевой величины рекуперации. Например, соотношение между рекуперативным моментом и скоростью вращения становится лучшей рекуперативной эффективностью, когда находится на линии лучшей эффективности α, как иллюстрировано на фиг. 4. Это соотношение перечерчивается, когда соотношение между величиной рекуперации и скоростью вращения мотора является характеристикой, иллюстрированной на фиг. 5; когда определяется величина рекуперации (= рекуперативный момент x скорость вращения мотора: целевая величина рекуперации), скорость вращения мотора, которая достигает лучшей рекуперативной эффективности (= скорости вращения Pri end), также определяется. Когда величина рекуперации (= целевая величина рекуперации) изменяется, скорость вращения для лучшей рекуперативной эффективности также будет изменяться.
Что касается "целевой скорости вращения в периоде поддержания величины рекуперации", скорость вращения Pri end, которая достигается в периоде увеличения величины рекуперации, задается в качестве целевой скорости вращения.
"Целевая скорость вращения в периоде уменьшения величины рекуперации" должна быть нижней предельной скоростью вращения, которая определяется в качестве скорости вращения насоса для главного масляного насоса 14 для получения количества масла для создания необходимого гидравлического давления для бесступенчатой трансмиссии 6 ременного типа во время замедления. Здесь, "необходимое гидравлическое давление" является гидравлическим давлением, с помощью которого представляется возможным переключать передачу во время замедления (переключение для возврата к низкой передаче) с подходящим прижимным усилием CVT.
[0037] На этапе S4, следом за определением на этапе S1, что это - не период увеличения величины рекуперации, определяется, является ли период или нет периодом уменьшения величины рекуперации для уменьшения командной скорости вращения Pri end бесступенчатой трансмиссии 6 ременного типа, на основе запроса для уменьшения величины рекуперации. Если Да (это - период уменьшения величины рекуперации), процесс переходит к этапу S6, а если Нет (это - не период уменьшения величины рекуперации), процесс переходит к этапу S5.
Здесь, "запрос для уменьшения величины рекуперации" выдается посредством операции возврата тормоза или операции снятия ноги с тормоза, выполняемой в случае движения с рекуперативным замедлением, вызванным нажатием тормоза. Кроме того, "период уменьшения величины рекуперации" ссылается на период, в котором, когда существует запрос для уменьшения величины рекуперации, командная скорость вращения Pri end уменьшается до нижней предельной скорости вращения, посредством выполнения управления, отличного от управления повышением передаточного числа, такого как управление постоянным передаточным отношением или управление понижением передаточного числа, в качестве управления передаточным числом бесступенчатой трансмиссии 6 ременного типа.
[0038] На этапе S5, следом за определением на этапе S4, что это - период поддержания величины рекуперации, значение темпа изменения скорости вращения Pri end задается в ноль, и скорость вращения Pri end удерживается посредством понижения передаточного числа бесступенчатой трансмиссии 6 ременного типа согласно уменьшению скорости транспортного средства, и процесс переходит к этапу S3. Например, на фиг. 3, когда достигается целевая скорость вращения в точке B, значение темпа изменения скорости вращения Pri end задается в ноль от точки B до точки C, и посредством понижения передаточного числа бесступенчатой трансмиссии 6 ременного типа согласно уменьшению в v, скорость вращения Pri end поддерживается в целевой скорости вращения.
[0039] На этапе S6, следом за определением на этапе S4, что это - период уменьшения величины рекуперации, вычисляется степень изменения уменьшения скорости вращения Pri end, сопровождающая уменьшение скорости транспортного средства, когда бесступенчатая трансмиссия 6 ременного типа поддерживает передаточное отношение (значение темпа изменения: небольшое), и процесс переходит к этапу S7.
Здесь, "темп изменения уменьшения скорости вращения Pri end" предоставляется в качестве темпа изменения уменьшения, когда передаточное отношение бесступенчатой трансмиссии 6 ременного типа в это время сохраняется, и командная скорость вращения Pri end уменьшается вдоль линии постоянного передаточного отношения согласно уменьшению скорости транспортного средства. Например, на фиг. 3, когда командная скорость вращения Pri end начинает уменьшаться в точке C, значение темпа изменения устанавливается в небольшое значение T темпа изменения, с которым командная скорость вращения Pri end уменьшается с пологим уклоном вдоль линии (b) постоянного передаточного отношения, от точки C до точки D.
[0040] На этапе S7, следом за вычислением темпа изменения уменьшения скорости вращения на этапе S6, определяется, находится или нет скорость транспортного средства во время начала уменьшения в области низкой скорости транспортного средства на стороне низкого передаточного отношения ниже заданной скорости транспортного средства. Если Да (скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства), процесс переходит к этапу S8, а если Нет (скорость транспортного средства во время начала уменьшения > заданной скорости транспортного средства), процесс переходит к этапу S3.
Здесь, "заданная скорость транспортного средства" задается в значение на стороне низкой скорости транспортного средства (стороне низкого передаточного отношения), при котором толчок начинается восприниматься от "натягивания" скорости вращения на входе трансмиссии, для которой рекуперативный момент предоставляется при уменьшении скорости вращения Pri end вдоль линии постоянного передаточного отношения.
[0041] На этапе S8, следом за определением на этапе S7, что скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства, при приближении к нижней предельной скорости вращения, темп изменения уменьшения скорости вращения на этапе S6 задается даже в меньший темп изменения уменьшения предельной скорости вращения, и процесс переходит к этапу S3.
Здесь, "темп изменения уменьшения предельной скорости вращения" должен быть темпом изменения уменьшения скорости вращения, который получается посредством переключения с линии постоянного передаточного отношения на линию понижения передаточного отношения, когда фактическая скорость вращения Pri end становится равной или меньше заданной скорости вращения, которая приближается к нижней предельной скорости вращения. Например, на фиг. 3, при достижении точки D, когда фактическая скорость вращения Pri end становится заданной скоростью вращения, значение темпа изменения задается в небольшое значение ε темпа изменения, с которым командная скорость вращения Pri end уменьшается вдоль линии понижения передаточного отношения, от точки D до точки E (точки достижения нижней предельной скорости вращения).
[0042] Далее описываются операции.
"Операция процесса рекуперативного управления скоростью", "операция рекуперативного управления скоростью" и "характерная операция рекуперативного управления скоростью" будут отдельно описаны, относительно операций устройства рекуперативного управления скоростью FF-гибридных транспортных средств согласно первому варианту осуществления.
[0043] [Операция процесса рекуперативного управления скоростью]
Операция процесса рекуперативного управления скоростью будет описана ниже на основе блок-схемы последовательности операций на фиг. 2.
[0044] Во время периода увеличения величины рекуперации на основе операции нажатия тормоза последовательность операций, которая проходит с этапа S1 → этап S2 → этап S3 в блок-схеме последовательности операций на фиг. 2, повторяется. На этапе S2 вычисляется темп изменения увеличения скорости вращения Pri end посредством понижения передаточного числа бесступенчатой трансмиссии 6 ременного типа (значение темпа изменения: большое). На этапе S3 скорость вращения Pri end для получения величины рекуперации согласно лучшей рекуперативной эффективности вычисляется в качестве целевой скорости вращения. Т.е. во время периода увеличения величины рекуперации, темп изменения увеличения скорости вращения Pri end задается в значение β темпа изменения, чтобы выполнять управление понижением передаточного числа бесступенчатой трансмиссии 6 ременного типа, в результате чего командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа быстро увеличивается от нижней предельной скорости вращения до целевой скорости вращения.
[0045] Во время периода поддержания величины рекуперации на основе операции поддержания величины нажатия тормоза последовательность операций, которая проходит от этапа S1 → этап S4 → этап S5 → этап S3 в блок-схеме последовательности операций на фиг. 2, повторяется. На этапе S5 значение темпа изменения скорости вращения Pri end задается в ноль, и скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа удерживается. На этапе S3 скорость вращения Pri end, достигнутая во время периода увеличения величины рекуперации, вычисляется в качестве целевой скорости вращения. Т.е. во время периода поддержания величины рекуперации, темп изменения увеличения скорости вращения Pri end задается в ноль, чтобы выполнять управление понижением передаточного числа бесступенчатой трансмиссии 6 ременного типа, в результате чего изменение передаточного числа проходит в соответствии с уменьшением в скорости вращения, так, чтобы удерживать командную скорость вращения Pri end.
[0046] Во время периода уменьшения величины рекуперации на основе операции возврата тормоза, и когда скорость транспортного средства во время начала уменьшения превышает заданную скорость транспортного средства, последовательность операций, которая проходит от этапа S1 → этап S4 → этап S6 → этап S7 → этап S3 в блок-схеме последовательности операций на фиг. 2, повторяется. На этапе S6, вычисляется темп изменения уменьшения скорости вращения Pri end, сопровождающий уменьшение скорости транспортного средства, когда бесступенчатая трансмиссия 6 ременного типа поддерживает передаточное отношение (значение темпа изменения: небольшое). На этапе S3 нижняя предельная скорость вращения, которая является скоростью вращения главного масляного насоса 14, который создает необходимое гидравлическое давление для бесступенчатой трансмиссии 6 ременного типа во время снятия ноги с педали акселератора, вычисляется в качестве целевой скорости вращения. Т.е. во время периода уменьшения величины рекуперации, когда скорость транспортного средства во время начала уменьшения > заданной скорости транспортного средства, темп изменения уменьшения скорости вращения Pri end задается в значение γ темпа изменения, чтобы выполнять управление поддержанием передаточного отношения бесступенчатой трансмиссии 6 ременного типа, таким образом, командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа уменьшается от целевой скорости вращения до нижней предельной скорости вращения с пологим уклоном.
[0047] С другой стороны, во время периода уменьшения величины рекуперации на основе операции возврата тормоза, и когда скорость транспортного средства во время начала уменьшения равна или меньше заданной скорости транспортного средства, последовательность операций, которая проходит от этапа S1 → этап S4 → этап S6 → этап S7 → этап S8 → этап S3 в блок-схеме последовательности операций на фиг. 2, повторяется. На этапе S8, при приближении к нижней предельной скорости вращения, темп изменения уменьшения скорости вращения на этапе S6 задается даже в меньший темп изменения уменьшения предельной скорости вращения. Т.е. во время периода уменьшения величины рекуперации, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства, темп изменения уменьшения скорости вращения Pri end переключается со значения γ темпа изменения на значение ε (<γ) темпа изменения, чтобы выполнять управление понижением передаточного числа бесступенчатой трансмиссии 6 ременного типа, таким образом, командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа уменьшается до нижней предельной скорости вращения с более пологим уклоном.
[0048] [Операция рекуперативного управления скоростью]
"Операция рекуперативного управления скоростью в сравнительном примере (фиг. 6)", "операция рекуперативного управления скоростью, когда скорость транспортного средства во время начала уменьшения > заданной скорости транспортного средства (фиг. 7) и "операция рекуперативного управления скоростью, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства (фиг. 8)" будут отдельно описаны, относительно операции рекуперативного управления скоростью.
[0049] (Операция рекуперативного управления скоростью в сравнительном примере: фиг. 6)
Если существует запрос для увеличения величины рекуперации посредством операции нажатия тормоза, и скорость вращения на входе трансмиссии для бесступенчатой трансмиссии должна быть увеличена, выполняется понижение передаточного числа. С другой стороны, сравнительный пример должен быть сконфигурирован так, что, если существует запрос для уменьшения величины рекуперации посредством операции возврата тормоза, и скорость вращения на входе трансмиссии для бесступенчатой трансмиссии должна быть уменьшена, выполняется повышение передаточного числа, в противоположность увеличению.
В случае сравнительного примера, когда повышение передаточного числа выполняется при уменьшении скорости вращения на входе трансмиссии, скорость вращения уменьшается с хорошей реакцией тем же образом, что и понижение передаточного числа для увеличения скорости вращения на входе трансмиссии, как иллюстрировано характеристикой командной скорости вращения Pri end после времени t2 понижения величины рекуперации на фиг. 6. Т.е. если темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии увеличивается, командная скорость вращения Pri end достигает нижней предельной скорости вращения в короткий период времени от времени t2 до времени t3 на фиг. 6, и угол θ1 раскрытия, пересекающийся с нижней предельной скоростью вращения, становится небольшим углом.
Кроме того, если выполняется управление трансмиссией с обратной связью, в котором нижняя предельная скорость вращения задается в качестве целевой скорости вращения, когда скорость вращения на входе трансмиссии уменьшается, последующая реакция фактической скорости вращения Pri end (характеристика штриховой линией) относительно командной скорости вращения Pri end (характеристика сплошной линией) задерживается.
Следовательно, при уменьшении скорости вращения на входе трансмиссии на основе запроса прекращения рекуперации, происходит провал, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения, как иллюстрировано характеристикой в области, указанной стрелкой F на фиг. 6.
[0050] (Операция рекуперативного управления скоростью, когда скорость транспортного средства во время начала уменьшения > заданной скорости транспортного средства: фиг. 7)
В противоположность сравнительному примеру, описанному выше, в первом варианте осуществления, во время периода уменьшения величины рекуперации, когда скорость транспортного средства во время начала уменьшения > заданной скорости транспортного средства, темп изменения уменьшения скорости вращения Pri end задается в значение γ темпа изменения. Затем, выполняется управление поддержанием передаточного отношения бесступенчатой трансмиссии 6 ременного типа, таким образом, командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа уменьшается от целевой скорости вращения до нижней предельной скорости вращения.
[0051] Если управление для поддержания передаточного отношения выполняется при уменьшении командной скорости вращения Pri end от целевой скорости вращения до нижней предельной скорости вращения таким образом, в противоположность понижению передаточного числа, которая увеличивает командную скорость вращения Pri end, скорость вращения уменьшается постепенно, как иллюстрировано характеристикой командной скорости вращения Pri end после времени t2 на фиг. 7. Т.е. если темп изменения уменьшения скорости вращения для командной скорости вращения Pri end уменьшается, командная скорость вращения Pri end достигает нижней предельной скорости вращения, требуя время от времени t2 до времени t5 на фиг. 7, и угол θ2 (>θ1) раскрытия, пересекающийся с нижней предельной скоростью вращения, становится большим углом.
Следовательно, в то время как последующая реакция фактической скорости вращения Pri end (характеристика штриховой линией) относительно командной скорости вращения Pri end (характеристика сплошной линией) задерживается посредством управления трансмиссией с обратной связью, при уменьшении скорости вращения Pri end на основе запроса прекращения рекуперации, формирование провала, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения, пресекается, как иллюстрировано характеристикой в области, указанной стрелкой G на фиг. 7.
[0052] (Операция рекуперативного управления скоростью, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства: фиг. 8)
В противоположность сравнительному примеру, описанному выше, в первом варианте осуществления, во время периода уменьшения величины рекуперации, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства, темп изменения уменьшения скорости вращения Pri end переключается со значения γ темпа изменения на значение ε (< γ) темпа изменения. Затем, выполняется управление понижением передаточного числа бесступенчатой трансмиссии 6 ременного типа, таким образом, командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа уменьшается до нижней предельной скорости вращения.
[0053] Если переключение на управление для понижения передаточного числа выполняется при уменьшении командной скорости вращения Pri end от целевой скорости вращения до нижней предельной скорости вращения таким образом, в противоположность понижению передаточного числа, которое увеличивает командную скорость вращения Pri end, скорость вращения уменьшается постепенно, как иллюстрировано характеристикой командной скорости вращения Pri end после времени t2 на фиг. 8. Т.е. поскольку темп изменения уменьшения скорости вращения для командной скорости вращения Pri end дополнительно уменьшается со времени t4, командная скорость вращения Pri end достигает нижней предельной скорости вращения, требуя длительного времени от времени t2 до времени t6 на фиг. 8, и угол θ3 (> θ2 > θ1) раскрытия, пересекающийся с нижней предельной скоростью вращения, становится большим углом.
Следовательно, в то время как последующая реакция фактической скорости вращения Pri end (характеристика штриховой линией) относительно командной скорости вращения Pri end (характеристика сплошной линией) задерживается посредством управления трансмиссией с обратной связью, при уменьшении скорости вращения Pri end на основе запроса прекращения рекуперации, формирование провала, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения, пресекается, как иллюстрировано характеристикой в области, указанной стрелкой H на фиг. 8.
[0054] [Характерная операция рекуперативного управления скоростью]
Первый вариант осуществления был сконфигурирован, чтобы выполнять управление, чтобы делать темп изменения уменьшения скорости вращения для командной скорости вращения Pri end ниже темпа изменения увеличения скорости вращения для командной скорости вращения Pri end, когда командная скорость вращения Pri end уменьшается на основе запроса для уменьшения величины рекуперации во время рекуперативного управления скоростью.
Т.е. при уменьшении командной скорости вращения Pri end на основе запроса для уменьшения в величине рекуперации, уменьшение происходит с более пологим уклоном по сравнению с увеличением командной скорости вращения Pri end, и достигает нижней предельной скорости вращения с углом раскрытия, который пересекает нижнюю предельную скорость вращения, формируя большой угол. Следовательно, даже если существует задержка последующей реакции вследствие управления трансмиссией с обратной связью, представляется возможным пресекать провал, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения.
Следовательно, при уменьшении скорости вращения на входе трансмиссии на основе запроса для уменьшения в величине рекуперации во время рекуперативного управления скоростью, представляется возможным пресекать провал, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения. Таким образом, в результате пресечения провала фактической скорости вращения Pri end, проблема с точки зрения защиты функционирования CVT, такой как недостаток в количестве масла вследствие уменьшения скорости вращения главного масляного насоса 14, может быть решена.
[0055] Первый вариант осуществления был сконфигурирован, чтобы выполнять управление передаточным числом посредством управления, отличного от повышения передаточного числа, в качестве управления передаточным числом бесступенчатой трансмиссии 6 ременного типа, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью.
Т.е. понижение передаточного числа выполняется, когда командная скорость вращения Pri end бесступенчатой трансмиссии 6 ременного типа увеличивается на основе запроса начала рекуперации, и понижение передаточного числа также выполняется при поддержании командной скорости вращения Pri end. Следовательно, когда оно переключается на повышение передаточного числа при увеличении командной скорости вращения Pri end, операции клапанов, которые подают гидравлическое давление в первичную масляную камеру и вторичную масляную камеру, реверсируются, и будут проходить слишком далеко на стороне повышения передаточного числа сверх целевого передаточного отношения вследствие задержки реакции клапана. Фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения вследствие этого чрезмерного повышения передаточного числа, что способствует провалу.
Следовательно, посредством выполнения управления, отличного от управления повышением передаточного числа, такого как управление постоянным передаточным отношением или управление понижением передаточного числа, при уменьшении командной скорости вращения Pri end, провал, который сопровождает повышение передаточного числа для переключения направления изменения передаточного отношения, пресекается.
[0056] В первом варианте осуществления, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, командная скорость вращения Pri end уменьшается вдоль линии постоянного передаточного отношения бесступенчатой трансмиссии 6 ременного типа. Затем, когда командная скорость вращения Pri end приближается к нижней предельной скорости вращения, выполняется управление, чтобы уменьшать командную скорость вращения Pri end посредством переключения от линии постоянного передаточного отношения на линию понижения передаточного отношения.
Т.е. если командная скорость вращения Pri end уменьшается вдоль линии постоянного передаточного отношения бесступенчатой трансмиссии 6 ременного типа, существуют ситуации, в которых угол раскрытия, который пересекает нижнюю предельную скорость вращения, не становится достаточно большим углом. Даже в такой ситуации, если переключается с линии постоянного передаточного отношения на линию понижения передаточного отношения, достаточной большой угол обеспечивается в качестве угла раскрытия, который пересекает нижнюю предельную скорость вращения.
Следовательно, при уменьшении командной скорости вращения Pri end, представляется возможным пресекать провал, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения, независимо от условий начала уменьшения.
[0057] Первый вариант осуществления был сконфигурирован, чтобы выполнять управление, чтобы уменьшать скорость вращения на входе трансмиссии, посредством переключения с линии постоянного передаточного отношения на линию понижения передаточного отношения, когда рабочая точка (VSP, APO) во время начала уменьшения находится в области на стороне низкого передаточного отношения.
Например, когда рабочая точка (VSP, APO) находится в области скорости транспортного средства с низким передаточным отношением, такой как, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства, влияние на сокращение и уменьшение фактической скорости вращения Pri end становится сильным, вследствие рекуперативного момента, который действует на входной вал бесступенчатой трансмиссии 6 ременного типа. Следовательно, когда удовлетворяется условие, в котором влияние на уменьшение фактической скорости вращения Pri end является сильным, представляется возможным пресекать провал, в котором фактическая скорость вращения Pri end падает ниже нижней предельной скорости вращения.
[0058] Далее описываются преимущества.
Преимущества, перечисленные ниже, могут быть получены с помощью устройства рекуперативного управления скоростью для FF-гибридного транспортного средства согласно первому варианту осуществления.
[0059] (1) В транспортном средстве (FF-гибридном транспортном средстве), имеющем бесступенчатую трансмиссию (бесступенчатую трансмиссию 6 ременного типа): электромотор (мотор-генератор 4), соединенный со стороной входного вала бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа), и который регенерирует энергию во время замедления; масляный насос (главный масляный насос 14), соединенный со стороной входного вала бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа), в котором скорость вращения для создания необходимого гидравлического давления для бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа) во время замедления задается в качестве нижней предельной скорости вращения; предусматривается контроллер (модуль 81 гибридного управления), который, когда существует запрос (операция нажатия тормоза) для увеличения величины рекуперации во время замедления, выполняет рекуперативное управление скоростью для понижения передаточного числа бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа) в сторону низкого передаточного отношения, и увеличения скорости вращения входного вала трансмиссии, с которым соединяется электромотор (мотор-генератор 4); и контроллер (модуль 81 гибридного управления) выполняет управление, чтобы делать темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии (командной скорости вращения Pri end) ниже темпа изменения увеличения скорости вращения для скорости вращения на входе трансмиссии (командной скорости вращения Pri end), когда скорость вращения на входе трансмиссии (командная скорость вращения Pri end) уменьшается на основе запроса (операция возврата тормоза) для уменьшения величины рекуперации во время рекуперативного управления скоростью.
Соответственно, при уменьшении скорости вращения на входе трансмиссии (командной скорости вращения Pri end) на основе запроса для уменьшения величины рекуперации во время рекуперативного управления скоростью, представляется возможным пресекать провал, в котором фактическая скорость вращения на входе трансмиссии (фактическая скорость вращения Pri end) падает ниже нижней предельной скорости вращения.
[0060] (2) Когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, контроллер (модуль 81 гибридного управления) выполняет управление передаточным числом посредством управления, отличного от управления повышением передаточного числа, в качестве управления передаточным числом бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа).
Соответственно, в дополнение к результатам из пункта (1), посредством выполнения управления, отличного от управления повышением передаточного числа, такого как управление постоянным передаточным отношением или управление понижением передаточного числа, при уменьшении скорости вращения на входе трансмиссии (командной скорости вращения Pri end), представляется возможным пресекать провал, который сопровождает повышение передаточного числа для переключения направления изменения передаточного отношения.
В частности, когда существует запрос (операция возврата педали тормоза) для уменьшения величины рекуперации во время рекуперативного управления скоростью, и скорость вращения на входе трансмиссии уменьшается, если трансмиссия повышает передачу, учитывая лучшую рекуперативную эффективность, повышение передаточного числа будет переключаться на понижение передаточного числа, когда скорость вращения на входе трансмиссии достигает нижней предельной скорости вращения. Таким образом, при переключении с повышения передаточного числа на понижение передаточного числа, т.е. когда направление переключения передачи реверсируется, существует риск того, что скорость вращения на входе трансмиссии проваливается и падает ниже нижней предельной скорости вращения, вследствие задержки реакции трансмиссии (задержки реакции гидравлического давления, задержки механической реакции механизма трансмиссии).
В отличие от этого, как описано в пункте (2), посредством выполнения управления передаточным числом, отличного от управления повышением передаточного числа (поддержания (ограничения) передаточного отношения в это время, т.е. запрета повышения передаточного числа), когда существует запрос (операция возврата педали тормоза) для уменьшения величины рекуперации во время рекуперативного управления скоростью, направление изменения передаточного числа не будет реверсироваться, когда скорость вращения на входе трансмиссии достигает нижней предельной скорости вращения, и представляется возможным пресекать провал скорости вращения на входе трансмиссии и падение ниже нижней предельной скорости вращения.
[0061] (3) Контроллер (модуль 81 гибридного управления) выполняет управление, чтобы уменьшать скорость вращения на входе трансмиссии (командную скорость вращения Pri end) вдоль линии постоянного передаточного отношения бесступенчатой трансмиссии (бесступенчатой трансмиссии 6 ременного типа), когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, и переключается с линии постоянного передаточного отношения на линию понижения передаточного отношения, чтобы уменьшать скорость вращения на входе трансмиссии (командную скорость вращения Pri end), когда скорость вращения на входе трансмиссии (командная скорость вращения Pri end) приближается к нижней предельной скорости вращения.
Соответственно, в дополнение к результатам пункта (2), при уменьшении скорости вращения на входе трансмиссии (командной скорости вращения Pri end), представляется возможным пресекать провал, в котором фактическая скорость вращения на входе трансмиссии (фактическая скорость вращения Pri end) падает ниже нижней предельной скорости вращения, независимо от условий начала уменьшения.
В частности, как описано выше в пункте (3), при уменьшении скорости вращения на входе трансмиссии, посредством понижения передаточного числа, когда скорость вращения на входе трансмиссии приближается к нижней предельной скорости вращения, представляется возможным уменьшать величину изменения понижения передаточного числа (изменение в темпе изменения для понижения передаточного числа), когда скорость вращения на входе трансмиссии достигает нижней предельной скорости вращения, и предотвращать провал скорости вращения на входе трансмиссии и падение ниже нижней предельной скорости вращения.
[0062] (4) Контроллер (модуль 81 гибридного управления) выполняет управление, чтобы уменьшать скорость вращения на входе трансмиссии, посредством переключения с линии постоянного передаточного отношения на линию понижения передаточного отношения, когда рабочая точка (VSP, APO) во время начала уменьшения находится в области на стороне низкого передаточного отношения.
Соответственно, в дополнение к результатам пункта (3), когда удовлетворяется условие, в котором влияние на уменьшение фактической скорости вращения на входе трансмиссии (фактической скорости вращения Pri end) является сильным, представляется возможным пресекать провал, в котором (фактическая скорость вращения на входе трансмиссии (фактическая скорость вращения Pri end) падает ниже нижней предельной скорости вращения.
[0063] Устройство рекуперативного управления скоростью транспортного средства настоящего изобретения было описано выше на основе первого варианта осуществления, но конкретные его конфигурации не ограничиваются первым вариантом осуществления, и различные модификации и дополнения в конструкции могут быть выполнены без отступления от рамок изобретения согласно каждому пункту формулы изобретения.
[0064] В первом варианте осуществления был показан пример, в котором, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, управление передаточным числом бесступенчатой трансмиссии 6 ременного типа выполняется посредством управления постоянным передаточным отношением, когда скорость вращения во время начала уменьшения > заданной скорости транспортного средства, и выполняется посредством управления, которое объединяет управление постоянным передаточным отношением и управление понижением передаточного числа, когда скорость транспортного средства во время начала уменьшения ≤ заданной скорости транспортного средства. Однако управление постоянным передаточным отношением может быть выполнено в качестве управления передаточным числом бесступенчатой трансмиссии независимо от состояния скорости транспортного средства или состояния передаточного отношения, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью. Кроме того, управление, которое объединяет управление постоянным передаточным отношением и управление понижением передаточного числа, может быть выполнено в качестве управления передаточным числом бесступенчатой трансмиссии независимо от состояния скорости транспортного средства или состояния передаточного отношения, когда существует запрос уменьшения величины рекуперации во время рекуперативного управления скоростью. Кроме того, управление понижением передаточного числа может быть выполнено в качестве управления передаточным числом бесступенчатой трансмиссии независимо от состояния скорости транспортного средства или состояния передаточного отношения, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью.
[0065] В первом варианте осуществления был показан пример, в котором бесступенчатая трансмиссия 6 ременного типа, в которой ремень 6c наматывается вокруг первичного шкива 6a и вторичного шкива 6b, и давление Ppri первичного шкива и давление Psec вторичного шкива являются гидравлическим давлением для переключения передач, используется в качестве бесступенчатой трансмиссии. Однако бесступенчатая трансмиссия может быть примером, который использует также бесступенчатую трансмиссию тороидального типа.
[0066] В первом варианте осуществления был показан пример, в котором устройство рекуперативного управления скоростью настоящего изобретения применяется к FF-гибридному транспортному средству согласно системе привода с одним мотором и двумя муфтами сцепления. Однако устройство рекуперативного управления скоростью настоящего изобретения может быть применено к FR-гибридному транспортному средству, или гибридному транспортному средству, отличному от типа приведения в движение с одним мотором, двумя муфтами сцепления, такому как система прямого соединения двигателя и мотора, или механизм распределения мощности. Кроме того, устройство может быть применено к любому транспортному средству, снабженному масляным насосом 14 бесступенчатой трансмиссии, такому как оборудованное двигателем транспортное средство, в котором мотор-генератор 4 добавляется к коленчатому валу, как иллюстрировано на фиг. 9. Дополнительно, устройство может быть применено к электрическому транспортному средству (включающему в себя транспортные средства на топливных элементах), которые приводятся в движение посредством мотор-генератора 4, как иллюстрировано на фиг. 10.
Устройство рекуперативного управления скоростью транспортного средства содержит контроллер. Контроллер выполняет рекуперативное управление скоростью для понижения передаточного числа бесступенчатой трансмиссии в сторону низкого передаточного отношения и увеличения скорости вращения входного вала трансмиссии, с которым соединяется электромотор, когда существует запрос для увеличения величины рекуперации во время замедления. Достигается предотвращение снижения скорости вращения входного вала трансмиссии ниже нижней предельной скорости вращения. 3 з.п. ф-лы, 10 ил.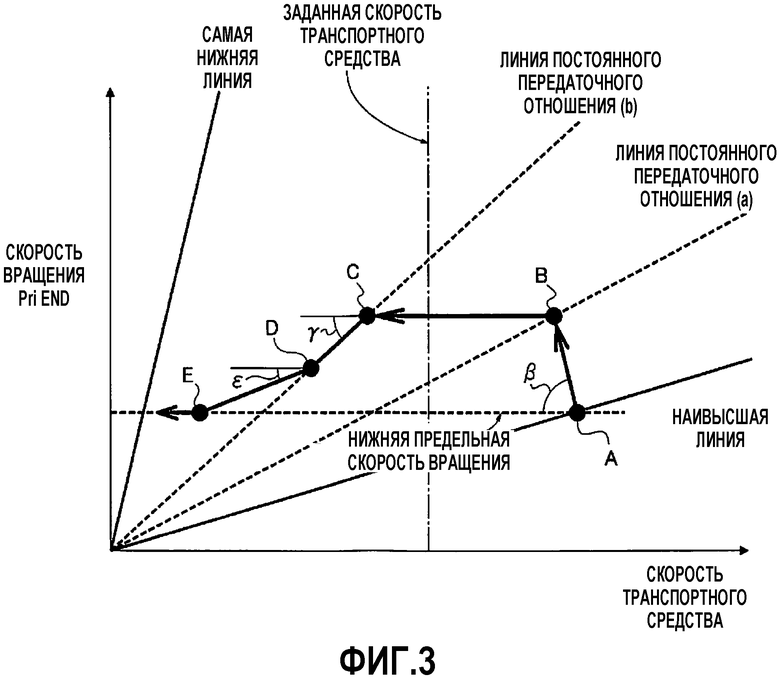
1. Устройство рекуперативного управления скоростью транспортного средства для транспортного средства, имеющего:
бесступенчатую трансмиссию,
электромотор, соединенный со стороной входного вала бесступенчатой трансмиссии, и который регенерирует энергию во время замедления, и
масляный насос, соединенный со стороной входного вала бесступенчатой трансмиссии, в котором скорость вращения для создания необходимого гидравлического давления для бесступенчатой трансмиссии во время замедления задается в качестве нижней предельной скорости вращения;
устройство рекуперативного управления скоростью транспортного средства, содержащее:
контроллер, который выполняет рекуперативное управление скоростью для понижения передаточного числа бесступенчатой трансмиссии в сторону низкого передаточного отношения и увеличения скорости вращения входного вала трансмиссии, с которым соединяется электромотор, когда существует запрос для увеличения величины рекуперации во время замедления;
при этом контроллер выполняет управление, чтобы делать темп изменения уменьшения скорости вращения для скорости вращения на входе трансмиссии ниже темпа изменения увеличения скорости вращения для скорости вращения на входе трансмиссии, когда скорость вращения на входе трансмиссии уменьшается на основе запроса для уменьшения величины рекуперации во время рекуперативного управления скоростью.
2. Устройство рекуперативного управления скоростью транспортного средства по п. 1, в котором, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, контроллер выполняет управление передаточным числом посредством управления, отличного от управления повышением передаточного числа, в качестве управления передаточным числом для бесступенчатой трансмиссии.
3. Устройство рекуперативного управления скоростью транспортного средства по п. 2, в котором контроллер выполняет управление, чтобы уменьшать скорость вращения на входе трансмиссии вдоль линии постоянного передаточного отношения бесступенчатой трансмиссии, когда существует запрос для уменьшения величины рекуперации во время рекуперативного управления скоростью, и переключается с линии постоянного передаточного отношения на линию понижения передаточного отношения, чтобы уменьшать скорость вращения на входе трансмиссии, когда скорость вращения на входе трансмиссии приближается к нижней предельной скорости вращения.
4. Устройство рекуперативного управления скоростью транспортного средства по п. 3, в котором контроллер выполняет управление, чтобы уменьшать скорость вращения на входе трансмиссии, посредством переключения с линии постоянного передаточного отношения на линию понижения передаточного отношения, когда рабочая точка во время начала уменьшения находится в области на стороне низкого передаточного отношения.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

