Изобретение относится к радиосвязи и может быть использовано для формирования частотно-манипулированных, а также частотно-модулированных сигналов или для их демодуляции.
Известен способ демодуляции высокочастотных частотно-модулированных сигналов (ЧМС), состоящий в том, что на частотный демодулятор, состоящий из двух параллельных контуров, определенным образом связанных друг с другом, и двух нелинейных элементов подается высокочастотный ЧМС. В результате формируется квазилинейный участок левого склона амплитудно-частотной характеристики (АЧХ) двух контуров, вследствие чего осуществляется преобразование ЧМС в амплитудно-частотно-модулированный сигнал (АЧМС). При этом амплитуда АЧМС изменяется по закону изменения частоты входного ЧМС. Этот сигнал далее испытывает такие же преобразования, как и в амплитудном демодуляторе [Нелинейные радиотехнические устройства / Под общей редакцией Н.Л.Теплова. М.: Воениздат, 1982, с.182-198, Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. Это означает, что на нелинейных элементах спектр АЧМС разрушается (разлагается) на низкочастотные и высокочастотные составляющие. Далее с помощью фильтра нижних частот выделяется низкочастотная составляющая, амплитуда которой изменяется по закону изменения частоты входного ЧМС. Затем, с помощью разделительной емкости, включенной в продольную цепь (последовательно), устраняется постоянная составляющая, возникшая на нелинейных элементах в результате взаимодействия с АЧМС. После этого низкочастотные колебания, содержащие полезную информацию, выделяются на низкочастотной нагрузке. Это режим демодуляции. Если в качестве входного высокочастотного сигнала используется гармонический сигнал, а на нелинейные элементы подается низкочастотный управляющий сигнал, то в общем случае на выходе будет сформирован высокочастотный сигнал с изменяемыми амплитудой, частотой и фазой. Это режим модуляции.
Недостаток такого способа и устройства его реализации состоит в том, что в режиме демодуляции для выделения низкочастотного сигнала, амплитуда которого изменяется в соответствии с законом изменения фазы высокочастотного, левый склон АЧХ формируют только путем выбора параметров двух контуров. Параметры реактивных и резистивных линейных элементов остальной части схемы частотного демодулятора и частотные характеристики нелинейных элементов при формировании заданного левого склона АЧХ не учитываются. Другим недостатком является отсутствие возможности коррекции коэффициента амплитудной модуляции АЧМС, что при прохождении через резонансные цепи приводит к уменьшению этой характеристики, то есть к известному явлению частичной амплитудной демодуляции АЧМС или к снижению помехоустойчивости. Третьим недостатком необходимо считать то, что в режиме модуляции амплитуда, частота и фаза сформированного высокочастотного сигнала изменяются по неизвестным законам, поскольку схема синтезирована только по критерию обеспечения операции демодуляции. Однако при частотной модуляции необходимо формирование ЧМС с постоянной амплитудой, частота которого изменяется по закону изменения амплитуды управляющего сигнала. К недостаткам следует также отнести отсутствие фильтрации входного сигнала в режиме частотной демодуляции за счет формирования необходимой формы АЧХ.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ демодуляции ЧМС, состоящий в том, что для демодуляции ЧМС используют частотный детектор, состоящий из каскадно-соединенных амплитудного ограничителя, преобразователя ЧМС в АЧМС в виде параллельного колебательного контура и обычного амплитудного демодулятора с одним нелинейным элементом. Далее процесс выделения низкочастотной составляющей осуществляется так же, как описано выше. Если частота несущего сигнала ЧМС расположена на левом склоне АЧХ контура, то амплитуда АЧМС изменяется по закону изменения частоты входного ЧМС [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292]. При необходимости между источником модулированных сигналов и нелинейным элементом или между нелинейным элементом и нагрузкой включают реактивный или резистивный четырехполюсник для согласования и дополнительной селекции сигнала и помехи. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного фазомодулированного колебания. Это режим демодуляции. Если в качестве входного высокочастотного сигнала используется гармонический сигнал, а на нелинейный элемент подается низкочастотный управляющий сигнал, то в общем случае на выходе будет сформирован высокочастотный сигнал с изменяемыми амплитудой, частотой и фазой. Это режим модуляции.
Недостаток способа и устройства его реализации состоит в том, что в режиме демодуляции после преобразования ЧМС в АЧМС коэффициент амплитудной модуляции АЧМС не контролируется и, как правило, бывает незначительным по величине, что ухудшает помехоустойчивость [Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988, стр.286-292. Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986, стр.247-252]. Этот недостаток связан с наличием колебательного контура для преобразования ЧМС в АЧМС, параметры которого не определены из условия формирования склона АЧХ с заданной крутизной. Третий недостаток связан с тем, что классическая теория радиотехнических цепей предполагает, что нелинейный элемент является чисто резистивным и безынерционным, в связи с чем никак не реагирует на изменение частоты и фазы входного сигнала, а реагирует только на изменение амплитуды. Между тем, повседневный опыт проектировщиков показывает, что нелинейные элементы имеют внутренние емкости и индуктивности, которые оказывают существенное влияние на формирование зависимости их проводимости (сопротивления или элементов матрицы проводимостей или сопротивлений) от частоты. Особенно существенно это проявляется с повышением частоты, к чему в настоящее время в основном стремятся проектировщики новых систем и средств радиосвязи. Основным недостатком необходимо считать то, что в режиме модуляции амплитуда, частота и фаза сформированного высокочастотного сигнала изменяются по неизвестным законам, поскольку схема синтезирована только по критерию обеспечения операции демодуляции. Это не позволяет уменьшить номенклатуру радиоустройств и унифицировать частотные модуляторы и демодуляторы в интересах производства. К недостаткам следует также отнести отсутствие фильтрации входного сигнала в режиме частотной демодуляции за счет формирования необходимой формы АЧХ.
Таким образом, основные недостатки всех существующих способов и устройств частотной модуляции и демодуляции совпадают и состоят в отсутствии возможности эффективного совмещения этих функций с помощью одного устройства.
Техническим результатом изобретения является обеспечение операции формирования ЧМС с изменяемой частотой по закону изменения амплитуды управляющего (информационного) низкочастотного сигнала и операций демодуляции и фильтрации ЧМС с усилением амплитуды за счет преобразования ЧМС в АЧМС с помощью высокочастотной части демодулятора с заданной крутизной склона АЧХ при заданной девиации частоты ЧМС в режиме модуляции и заданном коэффициенте амплитудной модуляции АЧМС в режиме демодуляции на высокочастотной нагрузке с помощью одного устройства, что повышает помехоустойчивость приемника, уменьшает номенклатуру и унифицирует частотные модуляторы и демодуляторы. В дальнейшем в режиме модуляции под высокочастотным сигналом будем понимать сигнал, возникающий в момент включения источника постоянного напряжения (скачка амплитуды), а под низкочастотным - управляющий или информационный сигнал. В режиме демодуляции под высокочастотным сигналом будем понимать ЧМС, а под низкочастотным - огибающую сформированного АЧМС в результате взаимодействия изменяемой частоты ЧМС и квазилинейного левого склона АЧХ всего устройства частотной модуляции и демодуляции. Возможность изменения варианта включения нелинейного элемента является дополнительным способом увеличения квазилинейных участков склона АЧХ в режиме демодуляции и модуляционной характеристики в режиме модуляции.
1. Указанный результат достигается тем, что в способе частотной модуляции и демодуляции высокочастотных сигналов, состоящем во взаимодействии высокочастотных и низкочастотных сигналов с устройством частотной модуляции и демодуляции, выполненном из реактивного четырехполюсника, двухэлектродного нелинейного элемента, фильтра нижних частот, разделительной емкости и низкочастотной нагрузки, в режиме демодуляции высокочастотный сигнал преобразовывают в амплитудно-частотно-модулированный сигнал путем подачи высокочастотного сигнала на левый склон АЧХ устройства частотной модуляции и демодуляции, с помощью двухэлектродного нелинейного элемента разрушают спектр амплитудно-частотно-модулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют низкочастотную составляющую, с помощью разделительной емкости устраняют постоянную составляющую, на низкочастотную нагрузку подают информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения частоты входного высокочастотного сигнала, в режиме модуляции двухэлектродный нелинейный элемент подключают к источнику информационного низкочастотного сигнала, частоту высокочастотного сигнала изменяют с изменением амплитуды информационного низкочастотного сигнала, дополнительно перед фильтром нижних частот в поперечную цепь вводят высокочастотную нагрузку, двухэлектродный нелинейный элемент выбирают активным с отрицательным дифференциальным сопротивлением и включают его между четырехполюсником и введенной высокочастотной нагрузкой в поперечную цепь, в режиме модуляции формируют модулированный по частоте высокочастотный сигнал с заданным законом изменения частоты, соответствующим закону изменения амплитуды информационного низкочастотного сигнала, путем обеспечения условий баланса фаз и баланса амплитуд на заданном диапазоне изменения высокой частоты и соответствующем диапазоне изменения амплитуды информационного низкочастотного сигнала, снимают частотно-модулированный сигнал с высокочастотной нагрузки, в режиме демодуляции преобразование частотно-модулированного сигнала в амплитудно-частотно-модулированный сигнал, его усиление и фильтрацию осуществляют путем формирования квазилинейного левого склона и заданной формы амплитудно-частотной характеристики устройства модуляции и демодуляции за счет реализации необходимых частотных зависимостей параметров четырехполюсника с помощью следующих математических выражений:

соответствующих элементов классической матрицы передачи четырехполюсника а, b, с, d; d - оптимальная частотная зависимость одного из элементов классической матрицы передачи; m∂ - оптимальная зависимость модуля передаточной функции высокочастотной части устройства частотной модуляции и демодуляции от частоты в режиме демодуляции, удовлетворяющая условию физической реализуемости; φ∂ - заданная линейно убывающая зависимость фазы передаточной функции высокочастотной части устройства частотной модуляции и демодуляции от частоты в режиме демодуляции, удовлетворяющая условию обеспечения линейности левого склона АЧХ; r0, x0 - заданные частотные зависимости действительной и мнимой составляющих сопротивления источника частотно-модулированного сигнала в режиме демодуляции, равные частотным зависимостям действительной и мнимой составляющих сопротивления воображаемого источника высокочастотных сигналов, возникающих в момент включения источника постоянного напряжения, в режиме модуляции; rн, хн - заданные частотные зависимости действительной и мнимой составляющих сопротивления высокочастотной нагрузки в обоих режимах; gн - расчетная частотная зависимость действительной составляющей проводимости высокочастотной нагрузки в обоих режимах; g∂, b∂ - заданные зависимости действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента от частоты несущего сигнала входного частотно-модулированного сигнала и амплитуды сформированного амплитудно-частотно-модулированного сигнала в режиме демодуляции; g, b - заданные зависимости действительной и мнимой составляющих сопротивления активного двухполюсного нелинейного элемента от высокой частоты генерируемого сигнала и амплитуды низкочастотного управляющего сигнала в режиме модуляции; остальные величины имеют смысл промежуточных обозначений в интересах упрощения математических выражений.
2. Указанный результат достигается тем, что в устройстве частотной модуляции и демодуляции высокочастотных сигналов, включенном между источником высокочастотных сигналов и низкочастотной нагрузкой и состоящем из линейного реактивного четырехполюсника, двухэлектродного нелинейного элемента, подключенного в режиме модуляции к источнику низкочастотного управляющего сигнала, фильтра нижних частот и разделительной емкости, дополнительно перед фильтром нижних частот введена высокочастотная нагрузка в поперечную цепь, в качестве двухэлектродного нелинейного элемента использован активный двухэлектродный нелинейный элемент с отрицательным дифференциальным сопротивлением, который включен между четырехполюсником и введенной высокочастотной нагрузкой в поперечную цепь, четырехполюсник выполнен в виде перекрытого Т-образного соединения из четырех реактивных двухполюсников с сопротивлениями x1n, x2n, x3n, x4n, соответственно, первый, второй и четвертый двухполюсники сформированы из двух параллельно соединенных последовательных контуров с параметрами L1k, C1k, L2k, C2k, параметры этих двухполюсников выбраны из условий формирования квазилинейного склона и заданной формы амплитудно-частотной характеристики в режиме частотной демодуляции и условий обеспечения баланса амплитуд и баланса фаз в заданном диапазоне изменения частоты и заданном диапазоне изменения амплитуды низкочастотного управляющего сигнала в режиме частотной модуляции с помощью определенных математических выражений:


классической матрицы передачи четырехполюсника a, b, c, d на заданных четырех частотах ωn=2πfn; n=1, 2, 3, 4 - номера заданных частот; d - оптимальные значения одного из элементов классической матрицы передачи на заданных четырех частотах; m∂n - оптимальные значения модуля передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на четырех заданных частотах в режиме демодуляции, удовлетворяющие условию физической реализуемости; φ∂n - заданные линейно убывающие значения фазы передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на заданных четырех частотах в режиме демодуляции, удовлетворяющие условию обеспечения линейности левого склона АЧХ; r0n, x0n - заданные значения действительной и мнимой составляющих сопротивления источника частотно-модулированного сигнала в режиме демодуляции, равные значениям действительной и мнимой составляющих сопротивления воображаемого источника высокочастотных сигналов, возникающих в момент включения источника постоянного напряжения, в режиме модуляции на заданных четырех частотах; rнn, хнn - заданные значения действительной и мнимой составляющих сопротивления высокочастотной нагрузки в обоих режимах на заданных четырех частотах; gнn - расчетные значения действительной составляющей проводимости высокочастотной нагрузки в обоих режимах на заданных четырех частотах; g∂n, b∂n - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды амплитудно-частотно-модулированного сигнала в режиме демодуляции; gn, bn - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды низкочастотного управляющего сигнала в режиме модуляции; k=1, 2, 4 - номера первого, второго и четвертого двухполюсников перекрытого Т-образного соединения четырех реактивных двухполюсников; x3n - заданные значения сопротивлений третьего двухполюсника на заданных четырех частотах; остальные величины имеют смысл промежуточных обозначений в интересах упрощения математических выражений.
На фиг.1 показана структурная схема устройства частотной модуляции и демодуляции высокочастотных сигналов (прототип), реализующего способ-прототип.
На фиг.2 показана структурная схема предлагаемого устройства частотной модуляции и демодуляции по п.2, реализующего предлагаемый способ-прототип по п.1.
На фиг.3 приведена структурная схема четырехполюсника (согласующе-фильтрующего устройства (СФУ)) предлагаемого устройства частотной модуляции и демодуляции по п.2, изображенного на фиг.2.
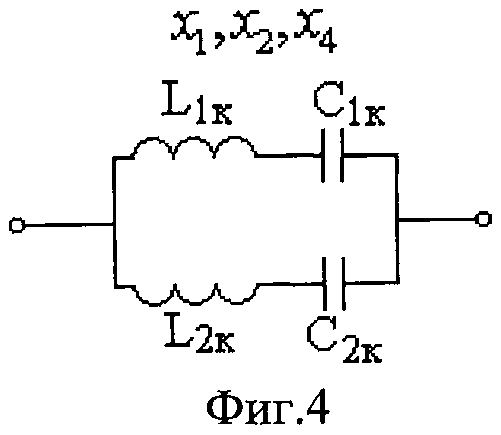
На фиг.4 приведена принципиальная схема первого, второго и четвертого двухполюсников, формирующих четырехполюсник (фиг.3) предлагаемого устройства частотной модуляции и демодуляции по п.2, изображенного на фиг.2.
Устройство-прототип (фиг.1) в режиме демодуляции содержит источник 1 высокочастотных сигналов (ЧМС) с сопротивлением z0=r0+jx0, четырехполюсник 2, двухполюсный (двухэлектродный) нелинейный элемент 3, фильтр нижних частот 4 на элементах R, C, разделительную емкость 5 на элементе Ср и низкочастотную нагрузку 6 на элементах Rн, Сн. В режиме модуляции к нелинейному элементу подключают источник управляющего (первичного или информационного) низкочастотного сигнала (на фиг.1 не показан).
Принцип действия устройства частотной модуляции и демодуляции высокочастотных сигналов (прототипа) состоит в следующем.
В режиме демодуляции частотно-модулированный (высокочастотный) сигнал от источника 1 подают на левый склон АЧХ реактивного четырехполюсника 2, представляющего собой параллельный колебательный контур и включенного между источником ЧМС - 1 и нелинейным элементом - 3, преобразовывают тем самым ЧМС в АЧМС, с помощью нелинейного элемента 3 разрушают спектр АЧМС на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью фильтра нижних частот 4 и поступают в низкочастотную нагрузку 6. Разделительная емкость 5 устраняет постоянную составляющую. В результате на выходе устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения частоты входного высокочастотного частотно-модулированного колебания.
В режиме модуляции изменение емкости варикапа контура под действием управляющего сигнала источника приводит к дополнительному изменению амплитуды, частоты и фазы входного ЧМС в общем случае по неконтролируемому закону. Остальные недостатки способа и устройства его реализации (прототипа) описаны выше.
Высокочастотная часть структурной схемы обобщенного предлагаемого устройства модуляции и демодуляции (до фильтра нижних частот) по п.2 (фиг.2) состоит из каскадно-соединенных источника высокочастотных сигналов 1, реактивного четырехполюсника 2, активного двухполюсного нелинейного элемента 3 и высокочастотной нагрузки 7. Низкочастотная часть структурной схемы содержит фильтр нижних частот 4, разделительную емкость 5 и низкочастотную нагрузку 6. В режиме модуляции источник ЧМС - 1 отключают, к нелинейному элементу подключают источник управляющего низкочастотного сигнала и источник постоянного напряжения (на фиг.2 не показаны). Реактивный четырехполюсник 2 выполнен в виде перекрытого Т-образного соединения четырех реактивных двухполюсников (фиг.3) с сопротивлениями x1 - 8, x2 - 9, x3 - 10, x4 - 11 соответственно. Первый, второй и четвертый двухполюсники сформированы из двух параллельно соединенных последовательных контуров с параметрами L1k, C1k, L2k, C2k (фиг.4). Параметры этих двухполюсников выбраны из условий формирования квазилинейного склона и заданной формы амплитудно-частотной характеристики в режиме частотной демодуляции и условий обеспечения баланса амплитуд и фаз в заданном диапазоне изменения частоты и заданном диапазоне изменения амплитуды низкочастотного управляющего сигнала в режиме частотной модуляции с помощью определенных математических выражений.
Принцип действия данного устройства состоит в том, что в режиме демодуляции при подаче ЧМС от источника 1 с сопротивлением z0 в результате специального выбора значений элементов двухполюсников будет сформирован левый склон АЧХ и заданная форма АЧХ высокочастотной части. Это обеспечивает заданный коэффициент амплитудной модуляции АЧМС, усиление и фильтрацию, что повышает помехоустойчивость приемника. Одновременно спектр АЧМС разрушается при помощи нелинейного элемента 3, включенного между четырехполюсником и высокочастотной нагрузкой в продольную цепь. Низкочастотное колебание выделяется с помощью фильтра нижних частот - 4. В результате низкочастотное колебание, амплитуда которого изменяется по закону изменения частоты входного ЧМС, выделяется на низкочастотной нагрузке 6.
В режиме модуляции на высокочастотной нагрузке формируется ЧМС с заданным законом изменения частоты, соответствующим закону изменения амплитуды низкочастотного сигнала. Принцип работы. При включении источника постоянного напряжения (на фиг.2 не показан) в силу скачкообразного изменения амплитуды во всей цепи возникают колебания, спектр которых занимает весь частотный радиодиапазон. Амплитуды этих колебаний быстро затухают. Однако, благодаря наличию внутренней обратной связи, в двухполюсном нелинейном элементе, например туннельном диоде - 1, на участке с падающей вольт-амперной характеристикой возникает отрицательное дифференциальное сопротивление (возникновение отрицательного сопротивления свидетельствует о выборе рабочей точки на падающем участке вольт-амперной характеристики), которое в силу синтеза четырехполюсника - 3 по заданному критерию компенсирует потери во всей цепи. Амплитуда колебания с заданной частотой усиливается до определенного уровня и затем ограничивается. Синтез четырехполюсника - 3 осуществлен по критерию совпадения реальных частотных зависимостей сопротивлений первого, второго и четвертого двухполюсников на четырех частотах с оптимальными характеристиками, обеспечивающими изменение частоты генерируемого сигнала по закону, соответствующему закону изменения амплитуды управляющего сигнала.
Благодаря этому колебание с заданной несущей частотой усиливается до момента увеличения амплитуды этого колебания до уровня, при котором амплитуда выходит за пределы падающего участка вольт-амперной характеристики. Наступает стационарный режим. В этом режиме изменение действительной и мнимой составляющих проводимости нелинейного элемента - 1 под действием управляющего сигнала приводит к изменению частоты генерируемого сигнала по закону изменения амплитуды низкочастотного управляющего сигнала. Сформированный ЧМС снимают с высокочастотной нагрузки.
Докажем возможность реализации указанных свойств.
Пусть на вход модулятора/демодулятора в режиме демодуляции воздействует частотно-модулированное колебание  , где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; Δω - девиация (максимальное отклонение) частоты; Ω - частота первичного информационного низкочастотного сигнала. Частота ЧМС изменяется по закону производной фазы
, где Uн, ωн - амплитуда и частота несущего высокочастотного колебания; Δω - девиация (максимальное отклонение) частоты; Ω - частота первичного информационного низкочастотного сигнала. Частота ЧМС изменяется по закону производной фазы  .
.
Если пределы изменения частоты частотно-модулированного сигнала (ЧМС) не выходят за границы левого квазилинейного склона амплитудно-частотной характеристики (АЧХ) демодулятора, то произойдет преобразование ЧМС в амплитудно-частотно-модулированный сигнал (АЧМС). При этом амплитуда АЧМС будет изменяться по закону (cos(Ωt)), то есть по закону изменения частоты входного ЧМС. Далее преобразование сигнала происходит так же как и в амплитудном демодуляторе.
Таким образом, основная задача при осуществлении частотной демодуляции состоит в обеспечении условий, при которых формируется квазилинейный участок левого склона АЧХ демодулятора в заданной полосе частот, границы которой совпадают или соизмеримы с крайними значениями частот диапазона изменения частоты ЧМС.
Входной модулированный высокочастотный сигнал Sвх и преобразованный с помощью высокочастотной части демодулятора (до фильтра нижних частот) высокочастотный сигнал Sвых связаны между собой следующим образом: Sвых=S21Sвх, где входным и выходным сигналом подразумевается входное и выходное напряжения; S21 - коэффициент передачи.
Пусть коэффициент передачи высокочастотной части частотного модулятора и демодулятора в режиме демодуляции задан следующим образом:

где m∂, φ∂ - заданные зависимости модуля и фазы коэффициента передачи от частоты, причем в полосе частот, в пределах которой сохраняется активность используемых активных диодов, значения модулей могут быть заданы больше единицы.
Пусть известны зависимости сопротивления источника сигнала Z0=r0+jx0, нагрузки Zн=rн+jxн и проводимости двухполюсного нелинейного элемента y∂=g∂+jb∂ от частоты (аргумент ω=2πf для простоты опущен). Кроме того, y∂=g∂+jb∂ зависит от амплитуды сформированного АЧМС (от амплитуды огибающей). Таким образом, каждому заданному значению амплитуды АЧМС соответствует определенное значение действительной и мнимой составляющих проводимости нелинейного элемента на заданной частоте. Для простоты записи аргументы ω=2πf (круговая частота) и U, I (напряжение или ток амплитуды АЧМС) опущены.
Требуется определить частотные характеристики четырехполюсника и двухполюсников, из которых сформирован четырехполюсник, а также минимальное количество элементов и значения параметров двухполюсников, при которых обеспечивались бы заданные частотные зависимости модулей m∂ и фаз φ∂ коэффициента передачи (1).
Пусть четырехполюсник содержит только реактивные элементы. Таким образом, с учетом условия взаимности (x12=-x21) СФУ может характеризоваться матрицей сопротивления

и соответствующей классической матрицей передачи:

где |х|=-х11-x22-x21 2 - определитель матрицы (2).
Известна классическая матрица передачи двухполюсного нелинейного элемента:

Перемножим матрицы (3) и (4). С учетом условий нормировки [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971, с.34-36] нормированную матрицу передачи высокочастотной части демодулятора (до фильтра нижних частот) запишем в следующем виде:

Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971, с.39], с учетом (5) получим выражение для коэффициента передачи:

Квадратный корень из (6) можно представить в виде комплексного числа  где
где
 ;
;  ; x1=r0rн-x0xн; y1=r0xн+x0rн.
; x1=r0rн-x0xн; y1=r0xн+x0rн.
После денормировки коэффициента передачи (6) путем умножения на  последнее выражение изменяется a1=rн; b1=xн. Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом
последнее выражение изменяется a1=rн; b1=xн. Денормированный коэффициент передачи связан с физически реализуемой передаточной функцией следующим образом  .
.
Для получения взаимосвязей, оптимальных по критерию обеспечения заданных частотных зависимостей модулей и фаз передаточной функции высокочастотной части демодулятора, подставим (6) в (1) и после разделения действительной и мнимой частей между собой получим систему двух уравнений:

Решение системы (7) имеет форму взаимосвязей между элементами матрицы сопротивлений СФУ или аппроксимирующих функций частотных зависимостей этих элементов, оптимальных по критерию (1):

В интересах дальнейших рассуждений путем использования известных соотношений между элементами матрицы сопротивлений и элементами классической матрицы передачи запишем взаимосвязи (8) в терминах элементов классической матрицы передачи (при этом порядок получающихся в дальнейшем уравнений уменьшается):

где  ;
;  ;
;  ; а, b, с, d - элементы классической матрицы передачи.
; а, b, с, d - элементы классической матрицы передачи.
Поскольку информация заключена в огибающей АЧМС, то частотную зависимость модуля m∂ передаточной функции на левом склоне АЧХ необходимо выбирать линейной. Кроме того, частотная зависимость модуля m∂ должна удовлетворять условию физической реализуемости (18). Частотная зависимость фазы φв передаточной функции может быть выбрана произвольно, или исходя из каких-либо других физических соображений. В данном изобретении она выбирается из условия обеспечения линейности левого склона АЧХ. Для этого она должна быть линейно убывающей и меняющей знак с положительного на отрицательный на частоте, равной максимальной частоте ЧМС. На этой частоте величина m∂ будет максимальной.
Пусть в режиме частотной модуляции известны зависимости сопротивления Z0=r0+jx0 воображаемого источника сигнала, возникающего в момент включения источника постоянного напряжения, нагрузки Zн=rн+jxн и проводимости нелинейного элемента y=g+jb от частоты (аргумент ω=2πf для простоты опущен). Диапазон изменения частоты в режиме модуляции соответствует диапазону изменения частоты в режиме демодуляции. Это означает, что частотные зависимости сопротивлений источника ЧМС и нагрузки одинаковы в обоих режимах. В общем случае частотные зависимости проводимости нелинейного элемента в режиме модуляции y=g+jb отличны от частотных зависимостей проводимости нелинейного элемента в режиме демодуляции y∂=g∂+jb∂, потому что действительная и мнимая составляющие проводимости нелинейного элемента зависят еще и от амплитуды низкочастотного управляющего сигнала в режиме модуляции и от амплитуды АЧМС в режиме демодуляции. Таким образом, каждому заданному значению амплитуды низкочастотного сигнала соответствует определенное значение действительной и мнимой составляющих проводимости нелинейного элемента на заданной частоте. Для простоты записи аргументы ω=2πf (круговая частота) и U, I (напряжение или ток амплитуды низкочастотного сигнала) опущены.
Нелинейный элемент и реактивный четырехполюсник характеризуются следующими матрицами передачи:

Умножим матрицу передачи реактивного четырехполюсника на матрицу передачи нелинейного элемента. С учетом Z0, Zн [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971, с.34-36] получим выражение для нормированной классической матрицы передачи устройства генерации и частотной демодуляции:
Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния, с учетом (11) получим выражение для коэффициента передачи:

Физически реализуемая передаточная функция связана с коэффициентом передачи простым соотношением:  .
.
Условие обеспечения стационарного режима генерации (условие баланса амплитуд и баланса фаз) соответствует равенству нулю знаменателя коэффициента передачи (12). После разделения комплексного уравнения, сформированного из этого равенства, на действительную и мнимую части, получим систему двух уравнений:

где А=1+rнg-хнb; В=rнb+xнg.
Решение системы (13) имеет вид взаимосвязей между элементами матрицы сопротивлений четырехполюсника:

В интересах дальнейших рассуждений путем использования известных соотношений между элементами матрицы сопротивлений и элементами классической матрицы передачи запишем взаимосвязи (14) в терминах элементов классической матрицы передачи (при этом порядок получающихся в дальнейшем уравнений уменьшается):

Индекс м введен для обозначения режима модуляции.
Для того чтобы одно и то же устройство выполняло функции частотного демодулятора и частотного модулятора, необходимо, чтобы оптимальные частотные аппроксимирующие функции (9) и (15) были попарно равны (решения, полученные для обоих режимов сшиваются). Из этих равенств следуют ограничения на частотные характеристики еще двух элементов классической матрицы передачи:

где A=Dм-D∂; B=Eм-E∂; D=Fм-F∂;  - качество устройства модуляции и демодуляции, характеризующее меру различия проводимости нелинейного элемента в режимах модуляции и демодуляции с учетом действительной составляющей проводимости нагрузки
- качество устройства модуляции и демодуляции, характеризующее меру различия проводимости нелинейного элемента в режимах модуляции и демодуляции с учетом действительной составляющей проводимости нагрузки  . Оптимальные частотные характеристики (9), (16) или (15), (16) должны удовлетворять условиям физической реализуемости (условию взаимности четырехполюсника):
. Оптимальные частотные характеристики (9), (16) или (15), (16) должны удовлетворять условиям физической реализуемости (условию взаимности четырехполюсника):

Условие (17) позволяет определить оптимальную амплитудно-частотную характеристику высокочастотной части предлагаемого устройства в режиме демодуляции:

Три независимые оптимальные частотные характеристики элементов классической матрицы передачи из (9), (16) или (15), (16) для элементов α, β, γ (элемент d в силу (17) является зависимым) означают, что реактивный четырехполюсник (СФУ) должен содержать минимум три независимых двухполюсника, частотные зависимости сопротивлений которых необходимо определять на основе использования (9), (16) или (15), (16) для элементов α, β, γ. Для этого надо выбрать типовую схему СФУ, определить элементы α, β, γ, выраженные через сопротивления реактивных двухполюсников, и подставить их в (9), (16) или (15), (16). Сформированную таким образом систему трех уравнений нужно решить относительно сопротивлений выбранных трех двухполюсников. Полученные математические выражения будут являться оптимальными частотными зависимостями (аппроксимирующими функциями) сопротивлений этих двухполюсников по критерию обеспечения заданной формы АЧХ в режиме демодуляции и обеспечения условий баланса амплитуд и баланса фаз в режиме модуляции в заданной полосе частот. Если количество двухполюсников в СФУ больше трех, то частотные характеристики остальных двухполюсников могут быть выбраны произвольно или из каких-либо других физических соображений, например, из условий физической реализуемости.
В соответствии с изложенным алгоритмом получены оптимальные частотные зависимости сопротивлений первого, второго и четвертого двухполюсников выбранной схемы СФУ в виде перекрытого Т-образного соединения четырех реактивных двухполюсников (фиг.3):

где n=1, 2… - номера частот интерполяции, введенные в интересах реализации полученных аппроксимаций (19). Сопротивления x3n третьего двухполюсника могут быть выбраны произвольно или исходя из каких-либо других физических соображений. Индекс n необходимо также внести и в остальные используемые исходные и расчетные величины r0n, x0n, rнn, xнn, g∂n, b∂n, gn, bn, m∂n, φ∂n и другие.
Для реализации оптимальных аппроксимаций (19) методом интерполяции необходимо сформировать первый, второй и четвертый двухполюсники с сопротивлениями x1n, x2n, x4n из не менее чем N (числа частот интерполяции) реактивных элементов, найти выражения для их сопротивлений, приравнять их оптимальным значениям сопротивлений двухполюсников на заданных частотах, определенным по формулам (19), и решить сформированную таким образом систему N уравнений относительно N выбранных параметров реактивных элементов. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например, из условия физической реализуемости. Пусть каждый из двухполюсников с сопротивлениями х1n, х2n, х4n сформирован из двух параллельно соединенных последовательных контуров L1k, C1k, L2k, C2k (фиг.4) (k=1, 2, 4 - номер двухполюсника (фиг.3)). Для N=4 составим три системы четырех уравнений:

Реализация оптимальных аппроксимаций частотных характеристик четырехполюсника в виде перекрытого Т-образного звена (19) с помощью (21) обеспечивает в режиме частотной модуляции увеличение диапазона изменения частоты генерируемого сигнала (девиации частоты), поскольку реализует условие баланса амплитуд и баланса фаз на четырех частотах заданной заданного диапазона изменения частоты и заданных соответствующих четырех значениях амплитуды низкочастотного управляющего сигнала. Это позволяет при разумном выборе положений заданных частот относительно друг друга ω1-ω2, ω1-ω3, ω1-ω4, ω2-ω3, ω2-ω4, ω3-ω4 расширить линейный участок модуляционной характеристики. В режиме частотной демодуляции это позволяет сформировать заданную форму АЧХ с квазилинейным участком левого склона АЧХ. Варьирование значений свободных параметров предлагаемого устройства позволяет еще больше увеличить квазилинейные участки склона АЧХ в режиме демодуляции и модуляционной характеристики в режиме модуляции. Однако эта задача выходит за рамки предлагаемого изобретения.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способ и устройство частотной модуляции и демодуляции высокочастотных сигналов, обеспечивающие формирование квазилинейного склона АЧХ в заданном диапазоне частот с заданной формой АЧХ, что позволяет осуществить преобразование ЧМС в АЧМС с заданным коэффициентом амплитудной модуляции АЧМС, усиление, фильтрацию в режиме демодуляции и формирование квазилинейной частотной модуляционной характеристики в заданном диапазоне изменения амплитуды управляющего сигнала в режиме модуляции с помощью многофункционального устройства, состоящего из нелинейного двухэлектродного элемента, подключенного к источнику низкочастотного управляющего сигнала и включенного между выходом реактивного четырехполюсника и высокочастотной нагрузкой в поперечную цепь, фильтра нижних частот, разделительной емкости и низкочастотной нагрузки, причем четырехполюсник выполнен в виде перекрытого Т-образного звена из четырех реактивных двухполюсников, первый, второй и четвертый из которых сформированы из двух параллельно соединенных последовательных контуров, параметры которых определены по соответствующим математическим выражениям.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная перечисленная выше последовательность операций позволяет с помощью одного радиоустройства осуществлять частотную демодуляцию и модуляцию высокочастотных сигналов с квазилинейным участком левого склона АЧХ и заданной формой АЧХ в интересах преобразования ЧМС в АЧМС, усиления и фильтрации в режиме демодуляции и квазилинейной частотной модуляционной характеристикой для формирования ЧМС в режиме модуляции за счет реализации условий баланса амплитуд и баланса фаз в заданном диапазоне изменения частоты и диапазоне изменения амплитуды управляющего сигнала.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью активные полупроводниковые диоды (туннельные диоды, ЛПД, диоды Ганна и т.д.), индуктивности и емкости, сформированные в заявленную схему реактивных двухполюсников, входящих в заявленную схему четырехполюсника. Значения сопротивлений двухполюсников x1, x2, x4, индуктивностей и емкостей могут быть определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении операций фильтрации, частотной модуляции, частотной демодуляции и усиления амплитуды высокочастотных сигналов с помощью одного устройства, что приводит к уменьшению номенклатуры радиоустройств и их унификации в интересах производства.


Изобретение относится к средствам для формирования частотно-манипулированных, а также частотно-модулированных сигналов или их демодуляции с одновременными фильтрацией и усилением. Технический результат заключается в повышении помехоустойчивости приемника. В режиме демодуляции высокочастотный сигнал преобразовывают в амплитудно-частотно-модулированный сигнал путем подачи высокочастотного сигнала на левый склон АЧХ устройства частотной модуляции и демодуляции, с помощью двухэлектродного нелинейного элемента разрушают спектр амплитудно-частотно-модулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют низкочастотную составляющую, с помощью разделительной емкости устраняют постоянную составляющую, на низкочастотную нагрузку подают информационный низкочастотный сигнал, в режиме модуляции двухэлектродный нелинейный элемент подключают к источнику информационного низкочастотного сигнала, частоту высокочастотного сигнала изменяют с изменением амплитуды информационного низкочастотного сигнала, при этом перед фильтром нижних частот в поперечную цепь вводят высокочастотную нагрузку и включают двухэлектродный нелинейный элемент между четырехполюсником и введенной высокочастотной нагрузкой в поперечную цепь. 2 н.п. ф-лы, 4 ил.
1. Способ частотной модуляции и демодуляции высокочастотных сигналов, состоящий во взаимодействии высокочастотных и низкочастотных сигналов с устройством частотной модуляции и демодуляции, выполненном из реактивного четырехполюсника, двухэлектродного нелинейного элемента, фильтра нижних частот, разделительной емкости и низкочастотной нагрузки, в режиме демодуляции высокочастотный сигнал преобразовывают в амплитудно-частотно-модулированный сигнал путем подачи высокочастотного сигнала на левый склон АЧХ устройства частотной модуляции и демодуляции, с помощью двухэлектродного нелинейного элемента разрушают спектр амплитудно-частотно-модулированного сигнала на высокочастотные и низкочастотные составляющие, с помощью фильтра нижних частот выделяют низкочастотную составляющую, с помощью разделительной емкости устраняют постоянную составляющую, на низкочастотную нагрузку подают информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения частоты входного высокочастотного сигнала, в режиме модуляции двухэлектродный нелинейный элемент подключают к источнику информационного низкочастотного сигнала, частоту высокочастотного сигнала изменяют с изменением амплитуды информационного низкочастотного сигнала, отличающийся тем, что перед фильтром нижних частот в поперечную цепь вводят высокочастотную нагрузку, двухэлектродный нелинейный элемент выбирают активным с отрицательным дифференциальным сопротивлением и включают его между четырехполюсником и введенной высокочастотной нагрузкой в поперечную цепь, в режиме модуляции формируют модулированный по частоте высокочастотный сигнал с заданным законом изменения частоты, соответствующим закону изменения амплитуды информационного низкочастотного сигнала, путем обеспечения условий баланса фаз и баланса амплитуд на заданном диапазоне изменения высокой частоты и соответствующем диапазоне изменения амплитуды информационного низкочастотного сигнала, снимают частотно-модулированный сигнал с высокочастотной нагрузки, в режиме демодуляции преобразование частотно-модулированного сигнала в амплитудно-частотно-модулированный сигнал, его усиление и фильтрацию осуществляют путем формирования квазилинейного левого склона и заданной формы амплитудно-частотной характеристики устройства модуляции и демодуляции за счет реализации необходимых частотных зависимостей параметров четырехполюсника с помощью следующих математических выражений:
 ;
;  ;
;
 , где
, где  ;
;  ;
;
 ;
;  ;
;
; A=Dм-D∂;
;
;
; A=Dм-D∂;
B=Eм-Е∂; D=Fм-F∂;  ;
;  ;
;
 ;
;

 ;
;
 ;
; 
 ;
;
α, β, γ - оптимальные частотные зависимости отношений соответствующих элементов классической матрицы передачи четырехполюсника а, b, с, d; d - оптимальная частотная зависимость одного из элементов классической матрицы передачи; m∂ - оптимальная зависимость модуля передаточной функции высокочастотной части устройства частотной модуляции и демодуляции от частоты в режиме демодуляции, удовлетворяющая условию физической реализуемости; φ∂ - заданная линейно убывающая зависимость фазы передаточной функции высокочастотной части устройства частотной модуляции и демодуляции от частоты в режиме демодуляции, удовлетворяющая условию обеспечения линейности левого склона АЧХ; r0, x0 - заданные частотные зависимости действительной и мнимой составляющих сопротивления источника частотно-модулированного сигнала в режиме демодуляции, равные частотным зависимостям действительной и мнимой составляющих сопротивления воображаемого источника высокочастотных сигналов, возникающих в момент включения источника постоянного напряжения, в режиме модуляции; rн, xн - заданные частотные зависимости действительной и мнимой составляющих сопротивления высокочастотной нагрузки в обоих режимах;
gн - расчетная частотная зависимость действительной составляющей проводимости высокочастотной нагрузки в обоих режимах; g∂, b∂ - заданные зависимости действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента от частоты несущего сигнала входного частотно-модулированного сигнала и амплитуды сформированного амплитудно-частотно-модулированного сигнала в режиме демодуляции; g, b - заданные зависимости действительной и мнимой составляющих сопротивления активного двухполюсного нелинейного элемента от высокой частоты генерируемого сигнала и амплитуды низкочастотного управляющего сигнала в режиме модуляции; остальные величины имеют смысл промежуточных обозначений в интересах упрощения математических выражений.
2. Устройство частотной модуляции и демодуляции высокочастотных сигналов, включенное между источником высокочастотных сигналов и низкочастотной нагрузкой и состоящее из линейного реактивного четырехполюсника, двухэлектродного нелинейного элемента, подключенного в режиме модуляции к источнику низкочастотного управляющего сигнала, фильтра нижних частот и разделительной емкости, отличающееся тем, что перед фильтром нижних частот введена высокочастотная нагрузка в поперечную цепь, в качестве двухэлектродного нелинейного элемента использован активный двухэлектродный нелинейный элемент с отрицательным дифференциальным сопротивлением, который включен между четырехполюсником и введенной высокочастотной нагрузкой в поперечную цепь, четырехполюсник выполнен в виде перекрытого Т-образного соединения из четырех реактивных двухполюсников с сопротивлениями x1n, x2n, x3n, x4n соответственно, первый, второй и четвертый двухполюсники сформированы из двух параллельно соединенных последовательных контуров с параметрами L1k, C1k, L2k, C2k параметры этих двухполюсников выбраны из условий формирования квазилинейного склона и заданной формы амплитудно-частотной характеристики в режиме частотной демодуляции и условий обеспечения баланса амплитуд и баланса фаз в заданном диапазоне изменения частоты и заданном диапазоне изменения амплитуды низкочастотного управляющего сигнала в режиме частотной модуляции с помощью определенных математических выражений:
 ;
;  ;
;  ;
;  ,
,
где  ;
;  ;
;
х=а2с1-а1с2, y=a2d1+b2c1-a1d2-b1c2; z=b2d1-b1d2;




 ;
;
 ;
;


 ;
;
 ;
;


 ;
;
 ;
;
 ;
;
 ;
;  ;
;  ;
;
;  ;
;  ;
;
 ;
;  ;
;
; A=Dм-D∂;
;
;
; A=Dм-D∂;
B=Eм-Е∂; D=Fм-F∂;  ;
;  ;
;

 ;
;  ;
;

 ; α, β, γ - оптимальные отношения соответствующих элементов классической матрицы передачи четырехполюсника а, b, с, d на заданных четырех частотах ωn=2πfn; n=1, 2, 3, 4 - номера заданных частот; d - оптимальные значения одного из элементов классической матрицы передачи на заданных четырех частотах; m∂n - оптимальные значения модуля передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на четырех заданных частотах в режиме демодуляции, удовлетворяющие условию физической реализуемости; φ∂n - заданные линейно убывающие значения фазы передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на заданных четырех частотах в режиме демодуляции, удовлетворяющие условию обеспечения линейности левого склона АЧХ; r0n, x0n - заданные значения действительной и мнимой составляющих сопротивления источника частотно-модулированного сигнала в режиме демодуляции, равные значениям действительной и мнимой составляющих сопротивления воображаемого источника высокочастотных сигналов, возникающих в момент включения источника постоянного напряжения, в режиме модуляции на заданных четырех частотах; rнп, xнп - заданные значения действительной и мнимой составляющих сопротивления высокочастотной нагрузки в обоих режимах на заданных четырех частотах; gнп - расчетные значения действительной составляющей проводимости высокочастотной нагрузки в обоих режимах на заданных четырех частотах; g∂n, b∂n - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды амплитудно-частотно-модулированного сигнала в режиме демодуляции; gn, bn - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды низкочастотного управляющего сигнала в режиме модуляции; k=1, 2, 4 - номера первого, второго и четвертого двухполюсников перекрытого Т-образного соединения четырех реактивных двухполюсников; x3n - заданные значения сопротивлений третьего двухполюсника на заданных четырех частотах; остальные величины имеют смысл промежуточных обозначений в интересах упрощения математических выражений.
; α, β, γ - оптимальные отношения соответствующих элементов классической матрицы передачи четырехполюсника а, b, с, d на заданных четырех частотах ωn=2πfn; n=1, 2, 3, 4 - номера заданных частот; d - оптимальные значения одного из элементов классической матрицы передачи на заданных четырех частотах; m∂n - оптимальные значения модуля передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на четырех заданных частотах в режиме демодуляции, удовлетворяющие условию физической реализуемости; φ∂n - заданные линейно убывающие значения фазы передаточной функции высокочастотной части устройства частотной модуляции и демодуляции на заданных четырех частотах в режиме демодуляции, удовлетворяющие условию обеспечения линейности левого склона АЧХ; r0n, x0n - заданные значения действительной и мнимой составляющих сопротивления источника частотно-модулированного сигнала в режиме демодуляции, равные значениям действительной и мнимой составляющих сопротивления воображаемого источника высокочастотных сигналов, возникающих в момент включения источника постоянного напряжения, в режиме модуляции на заданных четырех частотах; rнп, xнп - заданные значения действительной и мнимой составляющих сопротивления высокочастотной нагрузки в обоих режимах на заданных четырех частотах; gнп - расчетные значения действительной составляющей проводимости высокочастотной нагрузки в обоих режимах на заданных четырех частотах; g∂n, b∂n - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды амплитудно-частотно-модулированного сигнала в режиме демодуляции; gn, bn - заданные значения действительной и мнимой составляющих проводимости активного двухполюсного нелинейного элемента на заданных четырех частотах и четырех значениях амплитуды низкочастотного управляющего сигнала в режиме модуляции; k=1, 2, 4 - номера первого, второго и четвертого двухполюсников перекрытого Т-образного соединения четырех реактивных двухполюсников; x3n - заданные значения сопротивлений третьего двухполюсника на заданных четырех частотах; остальные величины имеют смысл промежуточных обозначений в интересах упрощения математических выражений.
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2354039C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2371835C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2366076C1 |
| US 6850575 B1, 01.02.2005. | |||

