Данная заявка притязает на приоритет заявки на патент Китая №200910105103.3, озаглавленной "METHOD, APPARATUS and SYSTEM FOR TIME SYNCHRONIZATION OF XDSL" и поданной 16 января 2009 года, которая полностью содержится в данном документе по ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области связи, а более конкретно к способу, устройству и системе для временной синхронизации цифровой абонентской линии (DSL).
Уровень техники
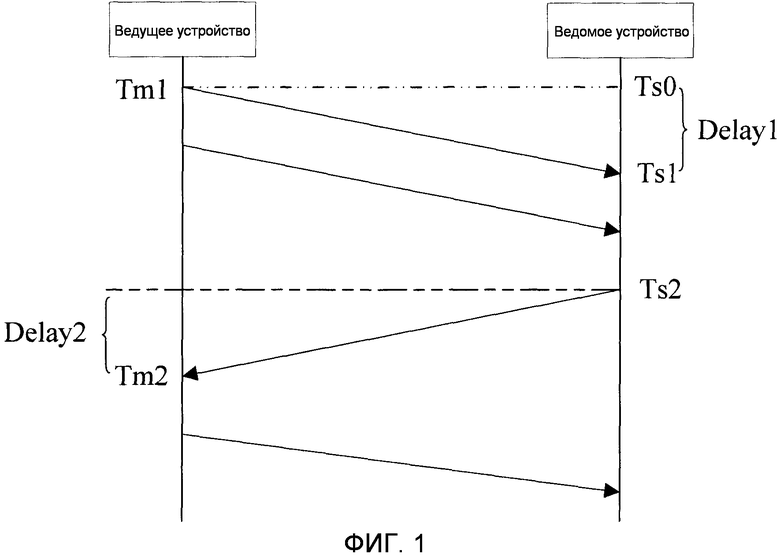
С появлением мобильной связи третьего поколения (3G) и других усовершенствованных технологий цифровой мобильной связи число фемтосот увеличивается, чтобы удовлетворять требованию. Временная синхронизация с высокой точностью требуется для фемтосоты. В общем, модуль восстановления тактовой синхронизации включается в сетевой терминал. Следовательно, тактовая синхронизация (т.е. частотная синхронизация) должна легко обеспечиваться для фемтосоты. Тем не менее временную синхронизацию очень трудно обеспечить. Некоторые технические проблемы должны быть разрешены. Фиг.1 является принципиальной схемой, показывающей схему достижения точной временной синхронизации, предложенную в данной области техники. При условии, что Offset (Смещение) является смещением между ведомым тактовым генератором и ведущим тактовым генератором, Delay1 является задержкой на распространение из ведущего тактового генератора в ведомый тактовый генератор, a Delay2 является задержкой на распространение из ведомого тактового генератора в ведущий тактовый генератор. Затем следующее может быть известно из фиг.1, а именно:
Ts0=Tm1+Offset
Ts1-Ts0=Delay1
- далее, Offset=Ts1-Tm1-Delay1
- аналогично, Tm2=Ts2-Offset+Delay2
- таким образом, Offset=Ts2-Tm2+Delay2
Если задержка из ведущего тактового генератора в ведомый тактовый генератор равна задержке из ведомого тактового генератора в ведущий тактовый генератор, т.е. Delay1=Delay2, то:
Offset=(Ts1+Ts2-Tm1-Tm2)/2. (1)
Таким образом, смещение между ведомым тактовым генератором и ведущим тактовым генератором получается такое, что ведомый тактовый генератор может точно синхронизироваться с ведущим тактовым генератором.
Тем не менее, в случае, если устройство х-цифровой абонентской линии (xDSL) функционирует в мобильном транзитном соединении, ведущее устройство соответствует оборудованию на центральной станции (СО), а ведомое устройство соответствует пользовательскому оборудованию (СРЕ). Канал между СО-оборудованием и СРЕ усложняется и проходит через аналоговую схему СО-оборудования, кабель, аналоговую схему СРЕ, а также схемы обработки цифровых сигналов в СО-оборудовании и СРЕ. Как результат, задержка в нисходящей линии связи из СО-оборудования в СРЕ не обязательно может быть равной задержке в восходящей линии связи из СРЕ в СО-оборудования; т.е., в общем, Delay1≠Delay2. Согласно некоторым результатам измерений разность между Delay1 и Delay2 превышает 1 мкс. Следовательно, смещение между тактовым генератором СО и тактовым генератором СРЕ не может извлекаться непосредственно с помощью формулы (1).
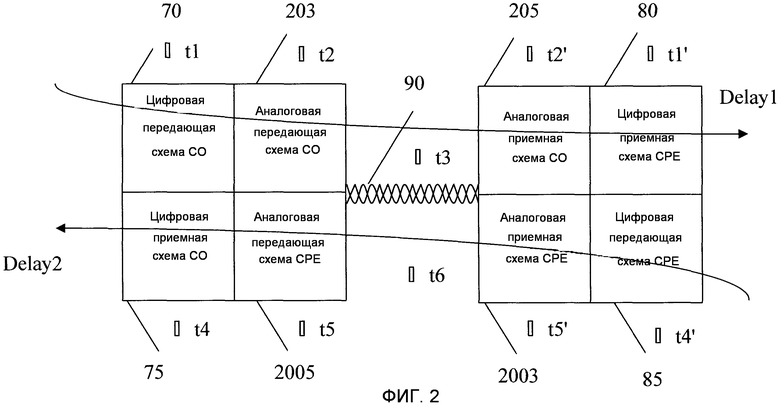
Как показано на фиг.2, нисходящая задержка включает в себя задержку Δt1 цифровой передающей схемы 70 СО, задержку Δt2 аналоговой передающей схемы 203 СО, нисходящую задержку Δt3 витой пары 90, задержку Δt2' аналоговой приемной схемы 205 СРЕ и задержку Δt1' цифровой приемной схемы СРЕ 80; и восходящая задержка включает в себя задержку Δt4 цифровой приемной схемы 75 СО, задержку Δt5 аналоговой приемной схемы 2005 СО, восходящую задержку Δt6 витой пары 90, задержку Δt5' аналоговой передающей схемы 2003 СРЕ и задержку Δt4' цифровой передающей схемы 85 СРЕ. В общем, Delay1=Δt1+Δt2+Δt3+Δt2'+Δt1'≠Delay2=Δt4+Δt5+Δt6+Δt5'+Δt4', и разность между двумя задержками, в общем, превышает 1 мкс.
Приемное xDSL-устройство обнаруживает кадровую границу и реализует кадровую синхронизацию во время инициализации. В фактических случаях незначительная ошибка может существовать при алгоритме синхронизации, и точность синхронизации ограничивается посредством частоты дискретизации, и ошибка кадровой синхронизации может влиять на точность временной синхронизации. Если начало указанного кадра записывается в качестве временной метки Tm1 (на стороне СО) или временной метки Ts2 (на стороне СРЕ) посредством передающего устройства, ошибка вводится, когда временная метка Ts1 (на стороне СРЕ) или временная метка Tm2 записывается посредством приемного устройства с помощью алгоритма для кадровой синхронизации. Вследствие ошибки кадровой синхронизации ошибка, введенная посредством записи Ts1 на стороне СРЕ или Tm2 на стороне СО, является очень большой. В частности, ошибка даже больше, когда Tm2 записывается посредством СО в восходящем направлении на низкой частоте дискретизации.
Delay1 также может получаться посредством прямого измерения задержки в нисходящем канале. Таким образом, смещение между СО и СРЕ может непосредственно получаться, т.е. Offset=Ts1-Tm1-Delay1. Тем не менее в настоящее время измерение задержки xDSL-канале (в частности, витой паре) не является достаточно точным, в частности, когда длина контура является слишком большой, возникают большие шумы в контуре, или возникают мостовые отводы в контуре.
Сущность изобретения
Варианты осуществления настоящего изобретения позволяют точно получать задержку канала, корректировать время тактового генератора, считываемое посредством СО-оборудования и посредством СРЕ, и достигать временной синхронизации между СРЕ и СО-оборудованием посредством вычисления смещения между тактовым генератором СРЕ и тактовым генератором СО-оборудования.
Вариант осуществления настоящего изобретения предоставляет способ для временной синхронизации цифровой абонентской линии (DSL). Способ включает в себя:
- прием, посредством первого устройства, второго символа, передаваемого посредством второго устройства, и получение времени Ts1, указывающего момент, когда второй символ принимается;
- передачу, посредством первого устройства, первого символа во второе устройство и получение времени Ts2, указывающего момент, когда первый символ передается;
- получение, посредством первого устройства, времени Tm2, указывающего момент, когда первый символ принимается посредством второго устройства, и времени Tm1, указывающего момент, когда второй символ передается посредством второго устройства;
- вычисление, посредством первого устройства, смещения между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и задержке первого устройства; и
- регулирование, посредством первого устройства, тактового генератора первого устройства согласно смещению, чтобы достигать синхронизации;
при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством первого устройства, время Tm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством первого устройства.
Вариант осуществления настоящего изобретения предоставляет DSL-устройство. DSL-устройство включает в себя:
- передающий блок, выполненный с возможностью передавать первый символ и получать время Ts2, указывающее момент, когда первый символ передается;
- приемный блок, выполненный с возможностью принимать второй символ, передаваемый посредством второго устройства, и получать время Ts1, указывающее момент, когда второй символ принимается, и получать время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства;
- процессорный блок, выполненный с возможностью получать задержку DSL-устройства, вычислять смещение между тактовым генератором DSL-устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и задержке DSL-устройства и регулировать тактовый генератор DSL-устройства согласно смещению, при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством первого устройства, время Tm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством первого устройства.
Вариант осуществления настоящего изобретения предоставляет систему для временной синхронизации DSL. Система включает в себя первое устройство и второе устройство, при этом:
первое устройство передает первый символ во второе устройство и принимает второй символ, передаваемый посредством второго устройства, получает время Ts2, указывающее момент, когда первый символ передается посредством первого устройства, время Ts1, указывающее момент, когда второй символ принимается посредством первого устройства, время Tm1, указывающее момент, когда второй символ передается посредством второго устройства, и время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, вычисляет смещение между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и регулирует тактовый генератор первого устройства согласно смещению, чтобы синхронизироваться с тактовым генератором второго устройства; и
второе устройство принимает первый символ и передает второй символ, получает время Tm1 и время Tm2 и передает время Tm1 и время Tm2 в первое устройство,
при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством DSL-устройства, время Tm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством DSL-устройства.
Согласно вариантам осуществления настоящего изобретения может разрешаться проблема в том, что возникает неясная кадровая граница, когда кадровая граница восстанавливается через алгоритм приемного терминала; ошибка синхронизации между приемным терминалом и передающим терминалом может вычисляться согласно конкретному символу, передаваемому посредством передающего терминала, и затем ошибка метки времени, возникающая за счет неясной кадровой границы, может быть скорректирована согласно ошибке синхронизации. Между тем, смещение между тактовым генератором СРЕ и тактовым генератором СО-оборудования может получаться посредством вычисления задержки канала так, что временная синхронизация между тактовым генератором СРЕ и тактовым генератором СО-оборудования может точно достигаться согласно смещению.
Краткое описание чертежей
Фиг.1 является принципиальной схемой, иллюстрирующей принцип временной синхронизации, заданный в IEEE 1588v2;
фиг.2 является принципиальной схемой задержки на нисходящее распространение и задержки на восходящее распространение;
фиг.3 является блок-схемой последовательности операций способа синхронизации согласно первому варианту осуществления настоящего изобретения;
фиг.4 является принципиальной схемой, идентифицирующей элементы, составляющие задержку на нисходящее распространение;
фиг.5 является принципиальной схемой, идентифицирующей элементы, составляющие задержку на восходящее распространение;
фиг.6 является блок-схемой последовательности операций способа синхронизации согласно второму варианту осуществления настоящего изобретения;
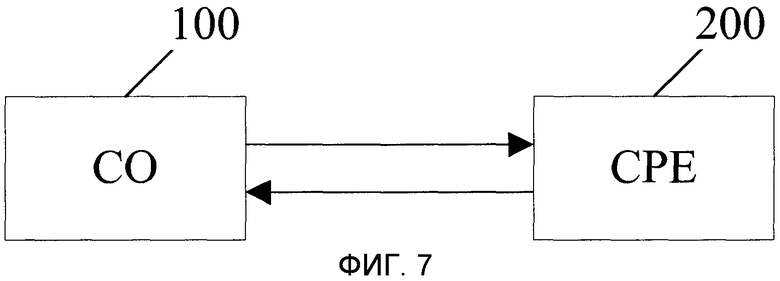
фиг.7 является принципиальной схемой системы согласно настоящему изобретению; и
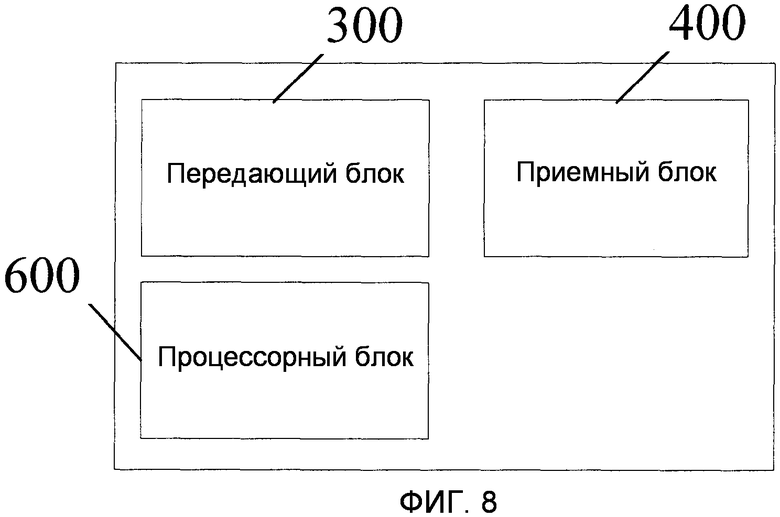
фиг.8 является принципиальной схемой устройства согласно настоящему изобретению.
Подробное описание вариантов осуществления
Далее понятно описывается настоящее изобретение со ссылкой на прилагаемые чертежи.
Первый вариант осуществления настоящего изобретения предоставляет способ для временной синхронизации xDSL. Способ включает в себя следующие этапы:
- передачу, посредством первого устройства, первого символа во второе устройство и получение времени Ts2, указывающего момент, когда первый символ передается;
- прием, посредством первого устройства, второго символа, передаваемого посредством второго устройства, и получение времени Ts1, указывающего момент, когда второй символ принимается;
- получение, посредством первого устройства, времени Tm2, указывающего момент, когда первый символ принимается посредством второго устройства, и времени Tm1, указывающего момент, когда второй символ передается посредством второго устройства;
- вычисление, посредством первого устройства, смещения между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и задержке первого устройства; и
- регулирование, посредством первого устройства, тактового генератора первого устройства согласно смещению, чтобы достигать синхронизации.
В следующих вариантах осуществления первое устройство рассматривается в качестве СРЕ, а второе устройство рассматривается в качестве СО; тем не менее специалисты в данной области техники могут понимать, что первое устройство также может быть СО, а второе устройство также может быть СРЕ.
Когда задержка в восходящей линии связи не равна задержке в нисходящей линии связи, смещение между тактовым генератором СРЕ и тактовым генератором СО получается при помощи определенного математического соотношения, существующего между задержкой Delay1 на нисходящее распространение и задержкой Delay2 на восходящее распространение, так что СРЕ (или СО) может регулировать локальный тактовый генератор согласно этому смещению.
Способ для временной синхронизации согласно первому варианту осуществления работает таким образом, что СРЕ сначала передает символ синхронизации, а затем СО передает символ синхронизации, этот конкретный процесс показывается на фиг.3.
На этапе 10 СРЕ передает первый символ и получает время Ts2, указывающее момент, когда первый символ передается.
Схема модуляции с несколькими дискретными несущими (DMT) используется в xDSL так, что сигнал передается в DMT-кадре. В этом случае временная синхронизация в xDSL также достигается в DMT-кадрах. Следовательно, первый символ, передаваемый посредством СРЕ, может быть DMT-кадром, и конкретный кадр, который должен выбираться, определяется посредством согласования между СРЕ и СО.
Во время инициализации СРЕ передает первый символ. Когда определенное положение первого символа записывается в буфер или D/A-модуль из буфера, СРЕ записывает соответствующее время Ts2 своего локального тактового генератора.
Конкретная точка, в которой временная метка инициируется для записи, также определяется посредством согласования между СО и СРЕ. Любое положение в первом символе может использоваться. В следующих вариантах осуществления начальное положение первого символа рассматривается в качестве примера.
На этапе 20 СО принимает первый символ, передаваемый посредством СРЕ, и получает время Tm2, указывающее момент, когда первый символ принимается.
CO принимает первый символ, передаваемый посредством СРЕ. Когда СО записывает выборку в начальном положении первого символа в буфер или выборка в начальном положении первого символа считывается посредством A/D-модуля из буфера, СО записывает соответствующее время Tm2' своего локального тактового генератора (т.е. инициируется действие для того, чтобы получать временную метку). Поскольку СО получает кадровую границу посредством вычисления с помощью определенного алгоритма, ошибка может быть введена, когда начальное положение вычисляется с помощью алгоритма. В этом случае время Tm2' должно быть скорректировано посредством СО.
Согласно разности фаз между фазой точки приема и фазой контрольной точки синусоидального сигнала (или косинусоидального сигнала) первого символа СО корректирует время Tm2' для времени Tm2, при этом время Tm2 является временем, указывающим момент, когда контрольная точка должна быть принята посредством СО. Точка приема является сигнальной точкой, в которой первый символ первоначально принимается посредством СО, и контрольная точка является сигнальной точкой, в которой первый символ первоначально передается посредством СРЕ.
Когда СО корректирует время Tm2' согласно синусоидальному сигналу в первом символе:
- фаза соответствующей точки в синусоидальном сигнале является фиксированной (например, 0°, 45°, 90° или любой другой угол), когда действие, чтобы получать временную метку, инициируется посредством СРЕ так, что эта точка может рассматриваться в качестве контрольной точки, и фаза контрольной точки получается, когда СО корректирует время Tm2'. В следующих вариантах осуществления 0° рассматривается в качестве примера.
СО получает положение синусоидального сигнала, в котором СО инициируется так, что оно получает временную метку, при этом положение является точкой приема, в которой первый символ принимается посредством СО, и вычисляет время, которое должно проходить от фазы точки приема до фазы контрольной точки. Затем согласно времени СО регулирует время Tm2' для времени Tm2.
СО также может проводить коррекцию при помощи множества синусоидальных сигналов в символе. Когда СРЕ записывает выборку в начальном положении первого символа в буфер или выборка в начальном положении первого символа считывается из буфера, каждый из синусоидальных сигналов в первом символе находится только в конкретной точке. СО рассматривает эти точки в качестве контрольных точек и знает соответствующие фазы контрольных точек в синусоидальных сигналах, когда СРЕ принимает временные метки. Например, контрольная точка в одном из синусоидальных сигналов располагается при 0°, одна контрольная точка располагается при 90°, одна контрольная точка располагается при 45°, и т.д.
После приема первого символа СО получает соответствующую точку приема из каждого из синусоидальных сигналов и получает фазу точки приема. Затем СО вычисляет время, прошедшее от фазы точки приема до фазы контрольной точки. Время является смещением временной метки, заданной посредством СО в каждом из синусоидальных сигналов. Фазы этих синусоидальных сигналов могут получаться через быстрое преобразование Фурье (FFT) в DMT-системе. Чтобы повышать точность оценки и уменьшать влияние шумов, смещение может быть средним этих нескольких вычислений или оцениваться с помощью FEQ-коэффициента обучаемого корректора частотной области (FEQ), идущего после FFT, поскольку компенсация углового смещения может выполняться посредством FEQ. Поскольку ошибка может быть введена во время кадровой DMT-синхронизации, может быть смещение между этими углами, полученными посредством СО и СРЕ. Смещение имеет линейное соотношение с частотами синусоидальных сигналов, и наклон линейного соотношения непосредственно отражает ошибку кадровой синхронизации. Смещение каждого из синусоидальных сигналов может быть проиллюстрировано в системе координат, и затем эти смещения соединяются посредством прямой. Наклон прямой является просто смещением временной метки, принимаемой посредством СО, вследствие ошибки синхронизации. Посредством влияния таких факторов, как шумы, эти угловые ошибки, полученные посредством фактического вычисления, могут не находиться строго на прямой. СО может получать оптимальную прямую для аппроксимации согласно определенному алгоритму оптимизации (например, методу наименьших квадратов) так, что СО может вычислять ошибку временных меток, принятых на дальнем конце, и корректирует временную метку Tm2' для временной метки Tm2 согласно этой ошибке.
Рассматривая признаки xDSL-системы, эти угловые ошибки также могут получаться при помощи FEQ-информации, и затем время Tm2' регулируется для времени Tm2 аналогичным образом.
На этапе 30 СО передает второй символ и получает время Tm1, указывающее момент, когда второй символ передается.
СО передает второй символ, который также может быть DMT-кадром. Когда СО записывает выборку в начальном положении второго символа в буфер или выборка в начальном положении второго символа считывается из буфера посредством D/A-модуля СО, значение времени локального тактового генератора на стороне СО принимается посредством СО (т.е. инициируется действие для того, чтобы получать временные метки), и получает время Tm1. Конкретная точка, в которой инициируется действие, чтобы получать время, также определяется посредством согласования между СО и СРЕ, и любое положение второго символа может использоваться в качестве конкретной точки. В следующих вариантах осуществления начальное положение второго символа рассматривается в качестве примера.
На этапе 40 СРЕ принимает второй символ, передаваемый посредством СО, и получает точное время Ts1, указывающее момент, когда второй символ принимается.
Когда выборка в начальном положении второго символа записывается в буфер или считывается из буфера посредством A/D-модуля, СРЕ инициирует действие, чтобы получать временные метки, и записывает значение времени локального тактового генератора на стороне СРЕ в качестве времени Ts1'. Поскольку СРЕ также вычисляет кадровую границу посредством определенного алгоритма, ошибка может быть введена в определении начального положения второго символа, и полученное время Ts1' также должно быть скорректировано посредством СРЕ.
Согласно разности фаз между фазой точки приема и фазой контрольной точки синусоидального сигнала (или косинусоидального сигнала) во втором символе, СРЕ корректирует временную метку Ts1' для временной метки Ts1, при этом временная метка Ts1 является временем, указывающим момент, когда контрольная точка должна быть принята. Точка приема является сигнальной точкой, в которой второй символ первоначально принимается посредством СРЕ, и контрольная точка является сигнальной точкой, в которой второй символ первоначально передается посредством СО.
Когда СРЕ использует один синусоидальный сигнал во втором символе, фаза соответствующей точки в этом синусоидальном сигнале является фиксированной, когда СО инициирует действие, чтобы записывать временную метку, таким образом, эта точка в синусоидальном сигнале может рассматриваться в качестве контрольной точки, и фаза точки получается, например, 0°. Следовательно, СРЕ может проводить коррекцию согласно этой контрольной точке.
СРЕ рассматривает соответствующую точку синусоидального сигнала, указывающую момент, когда второй символ принимается посредством СРЕ, в качестве точки приема и получает фазу этой точки. Затем СРЕ вычисляет время, прошедшее от этой фазы до фазы ближайшей контрольной точки, и регулирует время Ts1' для времени Ts1 согласно времени.
СРЕ также может использовать множество синусоидальных сигналов во втором символе. СРЕ знает фазы соответствующих точек этих синусоидальных сигналов, когда СО задает метки времени; например, соответствующая точка одного из синусоидальных сигналов располагается при 0°, одного при 90°, одного при 45° и т.д. Следовательно, СРЕ может рассматривать соответствующую точку каждого синусоидального сигнала в качестве контрольной точки. После приема второго символа СРЕ получает положение, в котором СРЕ задает метку времени для каждого из синусоидальных сигналов, и рассматривает эти точки в качестве точек приема. Затем СРЕ вычисляет время, прошедшее от фазы точки приема до фазы контрольной точки. Время является просто смещением метки времени, заданной посредством СРЕ в каждом из синусоидальных сигналов. Углы этих синусоидальных сигналов могут получаться через FFT в DMT-системе. Чтобы повышать точность оценки и уменьшать влияние шумов, смещение может получаться посредством усреднения после нескольких вычислений или посредством обучения корректора частотной области (FEQ) после FFT. Поскольку FEQ выполняет компенсацию углового смещения, обучаемый FEQ-коэффициент также может использоваться для того, чтобы оценивать угловое смещение каждого из синусоидальных сигналов. Поскольку кадровая DMT-синхронизация может иметь ошибку, могут быть смещения между этими углами, полученными посредством СРЕ и СО. Эти смещения имеют линейное соотношение с частотами синусоидальных сигналов, и наклон линейного соотношения непосредственно отражает ошибку кадровой синхронизации. Смещение каждого из синусоидальных сигналов может быть проиллюстрировано в системе координат, и эти смещения соединяются посредством прямой; и наклон прямой является просто смещением меток времени, заданных посредством СРЕ, вследствие ошибки синхронизации. Посредством влияния таких факторов, как шумы, эти угловые ошибки, полученные посредством фактического вычисления, могут не находиться строго на прямой. Соответственно, СРЕ может вычислять оптимальную прямую для аппроксимации согласно определенному алгоритму оптимизации (например, методу наименьших квадратов). Следовательно, СРЕ вычисляет смещение меток времени, заданных посредством СРЕ, и корректирует время Ts1' для времени Ts1 согласно смещению.
На этапе 50 СРЕ получает время Tm2 и время Tm1 СО.
СО передает время Tm1 и Tm2 в СРЕ через канал передачи сообщений.
СРЕ получает задержку на распространение СО и задержку на распространение СРЕ.
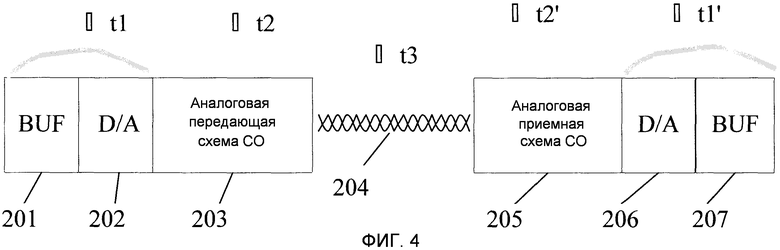
Задержка на распространение из СО в СРЕ показывается на фиг.4 и включает в себя:
- задержку цифровой передающей схемы СО, обозначенную посредством Δt1, которая включает в себя задержку BUF 201 и задержку D/A 202; и задержку цифровой приемной схемы СРЕ, обозначенную посредством Δt1', которая включает в себя задержку BUF 207 и задержку D/A 206. В некоторых системах задержки Δt1 и Δt1' являются фиксированными и могут считываться непосредственно из оборудования. В вычисление задержки должны быть включены обе из задержек. В некоторых других системах задержки Δt1 и Δt1' не являются фиксированными, таким образом, они должны исключаться во время вычисления. Также может быть возможным то, что часть обеих задержек является фиксированной и затем во время вычисления только фиксированная часть задержки включается;
- задержку аналоговой передающей схемы 203 СО, обозначенную посредством Δt2, и задержку аналоговой приемной схемы 205 СРЕ, обозначенную посредством Δt2'. Обе из задержек Δt2 и Δt2' возникают в устройствах и могут получаться на заводе или через обмен информацией между СРЕ и СО; и
- задержку символа на витой паре 204 из СО в СРЕ, обозначенную посредством Δt3, которая является неизвестной.
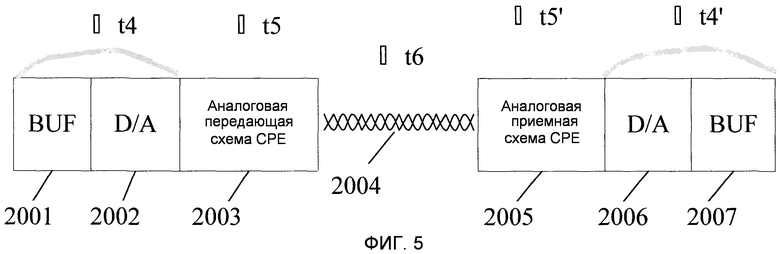
Задержка на распространение из СРЕ в СО показывается на фиг.5 и включает в себя:
- задержку цифровой передающей схемы СРЕ, обозначенную посредством Δt4, которая включает в себя задержку СРЕ BUF 2001 и задержку СРЕ D/A 2002; и задержку цифровой приемной схемы СО, обозначенную посредством Δt4', которая включает в себя задержку СО D/A 2006 и задержку BUF 2007. В некоторых системах обе из задержек Δt4 и Δt4' являются фиксированными и могут считываться непосредственно из оборудования. В некоторых других системах обе из задержек не являются фиксированными, и затем во время вычисления обе из задержек не включаются;
- задержку аналоговой передающей схемы 2003 СРЕ, обозначенную посредством Δt5, и задержку аналоговой приемной схемы 2005 СО, обозначенную посредством Δt5'. Поскольку обе из задержек Δt5 и Δt5' возникают в устройствах, они могут получаться на заводе или через обмен информацией между СО и СРЕ; и
- задержку сигнала на витой паре 2004 из СРЕ в СО, обозначенную посредством Δt6, которая является неизвестной.
СО передает задержки Δt1, Δt2, Δt4' и Δt5' в СРЕ через канал передачи сообщений, или предварительно сохраненные данные получаются посредством СРЕ.
На этапе 60 СРЕ вычисляет смещение между тактовым генератором СРЕ и тактовым генератором СО и регулирует тактовый генератор СРЕ согласно смещению.
СРЕ вычисляет смещение между тактовым генератором СРЕ и тактовым генератором СО согласно следующему:
Offset=Ts1-Tm2-Delay1, и
Offset=Tm2-Ts2+Delay2.
Во время процесса вычисления СРЕ устанавливает модель вычислений и разбивает Delay1 и Delay2. СРЕ сохраняет математическое соотношение между Delay1 и Delay2, например пропорцию Δt3=0,9Δt6 или Δt6=0,9Δt3. Пропорция может получаться через статистику. Offset может получаться с помощью следующих уравнений:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt1+Δt2+Δt3+Δt1'+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt4+Δt5+Δt6+Δt5'+Δt4')
или
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt2+Δt3+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt5+Δt6+Δt5')
Задержки Δt3 и Δt6 являются приблизительно идентичными или имеют пропорциональное соотношение. Допустим, что задержки Δt3 и Δt6 являются приблизительно идентичными. Offset может быть оценен посредством следующего уравнения:
Offset=(Ts1-Tm1-(Δt1+Δt2+Δt1'+Δt2')+Ts2-Tm2+(Δt4+Δt5+Δt4'+Δt5'))/2
или
Offset=(Ts1-Tm1-(Δt2+Δt2')+Ts2-Tm2+(Δt5+Δt5'))/2
Задержки Delay1 и Delay2 могут получаться с помощью оцененного Offset:
Delay1=Ts1-Tm1-Offset
Delay2=Ts2-Tm2+Offset
После получения смещения между тактовым генератором СРЕ и тактовым генератором СО СРЕ получает значение времени локального тактового генератора и регулирует время локального тактового генератора согласно полученному времени локального тактового генератора и смещению.
В вышеописанных вариантах осуществления СРЕ сначала передает символ, и затем СО принимает символ и дополнительно передает символ. В фактическом процессе мониторинга также является осуществимым то, что СО передает символ и затем СРЕ принимает символ и дополнительно передает символ. Второй случай описывается в нижеприведенном втором варианте осуществления, конкретный процесс которого показывается на фиг.6.
На этапе 15 СО передает второй символ и получает время Tm1, указывающее момент, когда второй символ передается.
Во время инициализации СО передает второй символ. Когда выборка в конкретном положении второго символа записывается в буфер посредством СО или считывается из буфера посредством D/A-модуля СО, действие получения временных меток инициируется, чтобы считывать значение времени локального тактового генератора СО и получать временную метку Tm1. Второй символ может быть DMT-кадром. Конкретная точка, в которой инициируется действие получения временных меток, также определяется посредством согласования между СО и СРЕ. Любое положение во втором символе может использоваться в качестве конкретной точки. В дальнейшем в этом документе начальное положение второго символа рассматривается в качестве примера в этом варианте осуществления.
На этапе 25 СРЕ принимает второй символ, передаваемый посредством СО, и получает точное время Ts1, указывающее момент, когда второй символ принимается.
Когда выборка в начальном положении второго символа записывается в буфер посредством СРЕ или считывается из буфера посредством A/D-модуля, действие получения временных меток инициируется для того, чтобы получать значение времени локального тактового генератора СРЕ, обозначенное посредством Ts1'. Поскольку СРЕ вычисляет кадровую границу посредством определенного алгоритма, ошибка может быть введена, когда начальное положение вычисляется посредством алгоритма. В этом случае время Ts1' должно быть скорректировано посредством СРЕ. Способ коррекции, используемый здесь, является идентичным способу коррекции СРЕ в первом варианте осуществления.
На этапе 35 СРЕ передает первый символ и получает время Ts2, указывающее момент, когда первый символ передается посредством СРЕ.
Во время инициализации СРЕ передает первый символ, который также может быть DMT-кадром. Когда выборка в конкретном положении первого символа записывается в буфер или считывается из буфера посредством D/A-модуля, действие получения временных меток инициируется посредством СРЕ, чтобы считывать значение времени локального тактового генератора СРЕ, обозначенное посредством Ts2. Конкретная точка, в которой инициируется действие получения временных меток, также определяется посредством согласования между СО и СРЕ. Любое положение в первом символе может использоваться. В дальнейшем в этом документе начальное положение первого символа рассматривается в качестве примера в этом варианте осуществления.
На этапе 45 СО принимает первый символ, передаваемый посредством СРЕ, и получает точное время Тт2, указывающее момент, когда первый символ принимается.
СО принимает первый символ, передаваемый посредством СРЕ. Когда выборка в начальном положении первого символа записывается в буфер или считывается из буфера посредством A/D-модуля, действие получения временных меток инициируется, чтобы считывать значение времени локального тактового генератора СО, обозначенное посредством Tm2'. Поскольку СО вычисляет кадровую границу посредством определенного алгоритма, временная метка Tm2' должна быть скорректирована посредством СО. Способ коррекции, используемый в данном документе, является идентичным способу коррекции СО в первом варианте осуществления.
На этапе 55 СРЕ получает время Tm1 и Tm2, полученное посредством СО.
СО передает время Tm1 и Tm2 в СРЕ через канал передачи сообщений.
СРЕ получает задержку СО и задержку СРЕ:
- задержку цифровой передающей схемы СО, обозначенную посредством Δt1, которая включает в себя задержку СО BUF 201 и задержку D/A 202; и задержку цифровой приемной схемы СРЕ, обозначенную посредством Δt1', которая включает в себя задержку СРЕ BUF 207 и задержку D/A 206. В некоторых системах обе из задержек являются фиксированными и могут считываться непосредственно из оборудования. В вычисление задержки на распространение должны быть включены обе из задержек. В некоторых других системах обе из задержек не являются фиксированными, таким образом, они должны исключаться во время вычисления. Также может быть возможным то, что часть двух задержек является фиксированной и затем во время вычисления только фиксированная часть включается;
- задержку аналоговой передающей схемы 203 СО, обозначенную посредством Δt2, и задержку аналоговой приемной схемы 205 СРЕ, обозначенную посредством Δt2'. Задержки Δt2 и Δt2' возникают в оборудовании и могут получаться на заводе или через обмен информацией между СРЕ и СО;
- задержку символа на витой паре 204 из СО в СРЕ, обозначенную посредством Δt3, которая является неизвестной.
Задержка на распространение из СРЕ в СО показывается на фиг.5 и включает в себя:
- задержку цифровой передающей схемы СРЕ, обозначенную посредством Δt4, которая включает в себя задержку СРЕ BUF 2001 и задержку СРЕ D/A 2002; и задержку цифровой приемной схемы СО, обозначенную посредством Δt4', которая включает в себя задержку СО D/A 2006 и задержку BUF 2007. В некоторых системах обе из задержек являются фиксированными и могут считываться непосредственно из оборудования. В некоторых других системах обе из задержек не являются фиксированными, и затем во время вычисления две задержки не включаются;
- задержку аналоговой передающей схемы 2003 СРЕ, обозначенную посредством Δt5, и задержку аналоговой приемной схемы 2005 СО, обозначенную посредством Δt5'. Поскольку обе задержки Δt5 и Δt5' возникают в устройствах, они могут получаться на заводе или через обмен информацией между СО и СРЕ;
- задержку сигнала на витой паре 2004 из СРЕ в СО, обозначенную посредством Δt6, которая является неизвестной.
СО передает задержки Δt1, Δt2, Δt4' и Δt5 в СРЕ через канал передачи сообщений; или альтернативно, СРЕ получает предварительно сохраненные данные, и тем самым СО может также не передавать информацию.
На этапе 65 СРЕ вычисляет смещение между тактовым генератором СРЕ и тактовым генератором СО Offset и регулирует время тактового генератора СРЕ согласно этому смещению.
СРЕ вычисляет смещение согласно следующим уравнениям:
Offset=Ts1-Tm2-Delay1, и
Offset=Ts2-Tm2+Delay2.
Во время процесса вычисления СРЕ устанавливает модель вычислений и разбивает Delay1 и Delay2. СРЕ сохраняет математическое соотношение между Delay1 и Delay2, например пропорцию Δt3=0,9Δt6 или Δt6=0,9Δt3. Конкретное математическое соотношение может получаться через статистику. Offset получается с помощью следующих уравнений:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt1+Δt2+Δt3+Δt1'+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt4+Δt5+Δt6+Δt5'+Δt4')
или
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt2+Δt3+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt5+Δt6+Δt5')
Поскольку задержки Δt3 и Δt6 являются приблизительно идентичными или имеют пропорциональное соотношение. Offset может быть оценен.
После того как Offset получается, связанные задержки Delay1 и Delay2 могут получаться:
Delay1=Ts1-Tm1-Offset
Delay2=Ts2-Tm2+Offset
После получения смещения между тактовым генератором СРЕ и тактовым генератором СО СРЕ получает время локального тактового генератора СРЕ и регулирует время локального тактового генератора согласно полученному времени локального тактового генератора и оцененному смещению.
Третий вариант осуществления настоящего изобретения предоставляет способ для временной синхронизации xDSL. Способ является применимым к случаю, когда задержки Delay1 и Delay2 могут получаться посредством SELT, или DELT, или других способов. Способ включает в себя следующие этапы.
На этапе 1 СО передает символ и получает время Tm1, указывающее момент, когда символ передается (или СРЕ передает символ и получает время Ts2, указывающее момент, когда символ передается), и этот символ может быть DMT-кадром.
На стадии инициализации СО передает символ. Когда СО записывает данные, дискретизированные в конкретном положении этого символа, в буфер или D/A-модуль СО считывает данные, дискретизированные в конкретном положении этого символа, из буфера, СО инициирует действие задания метки времени, считывает время локального тактового генератора СО и получает время Tm1. Конкретная точка, в которой инициируется действие задания метки времени, также определяется посредством согласования между СО и СРЕ, и любое положение в этом символе может использоваться. В дальнейшем в этом документе начальное положение этого символа рассматривается в качестве примера в этом варианте осуществления.
На этапе 2 СРЕ принимает символ, передаваемый посредством СО, и получает время Ts1 приема (или СО принимает символ, передаваемый посредством СРЕ, и получает время Tm2, указывающее момент, когда этот символ принимается).
Когда СРЕ записывает данные, дискретизированные в начальном положении этого символа, в буфер или A/D-модуль считывает данные, дискретизированные в начальном положении этого символа, из буфера, СРЕ инициирует действие задания метки времени и считывает локальное время Ts1' СРЕ. Поскольку СРЕ вычисляет кадровую границу посредством определенного алгоритма, начальное положение, вычисляемое посредством алгоритма, может иметь ошибку. В этом случае время Ts1' должно быть скорректировано посредством СРЕ. Способ коррекции является идентичным способу коррекции СРЕ в первом варианте осуществления.
На этапе 3 СРЕ получает время Tm1, передаваемое посредством СО (или СРЕ получает время Tm2, передаваемое посредством СО).
СО передает время Tm1 (или время Tm2) в СРЕ через канал передачи сообщений.
На этапе 4 СРЕ вычисляет смещение между тактовым генератором СРЕ и тактовым генератором СО согласно Offset=Ts1-Tm1-Delay1 или Offset=Ts2-Tm2+Delay2.
Поскольку Delay1 (или Delay2) измерен, смещение может разрешаться.
На этапе 4 СРЕ получает значение времени локального тактового генератора и регулирует время локального тактового генератора согласно полученному времени локального тактового генератора и смещения.
Четвертый вариант осуществления настоящего изобретения предоставляет способ для временной синхронизации DSL. Поскольку задержка существует вследствие обработки оборудования, задержка оборудования должна учитываться, когда вычисляется задержка на распространение символа. Таким образом, задержка СО-оборудования может не требоваться, когда Offset вычисляется посредством СРЕ. Конкретные этапы заключаются в следующем.
На первом этапе СО передает второй символ и получает время, указывающее момент, когда второй символ передается.
Во время инициализации, когда выборка в начальном положении второго символа записывается в буфер посредством СО или считывается из буфера посредством СО, действие получения временных меток инициируется, чтобы считывать время локального тактового генератора Tm1.
СО-оборудование получает задержку на цифровую передачу СО Δt1 и задержку на аналоговую передачу Δt2 и обрабатывает время, когда второй символ передается посредством СО-оборудования. В частности, Tm1=Tm1+At1+At2; и если задержка на цифровую передачу не является фиксированной, она может исключаться, и в этом случае Tm1=Tm1+At2.
На втором этапе СРЕ принимает второй символ и получает время, указывающее момент, когда второй символ принимается посредством СРЕ.
Когда выборка в начальном положении второго символа записывается в буфер посредством СРЕ или считывается из буфера посредством A/D-модуля, действие получения временных меток инициируется посредством СРЕ, чтобы считывать значение времени локального тактового генератора СРЕ, обозначенное посредством Ts1'. Поскольку СРЕ вычисляет кадровую границу посредством определенного алгоритма, ошибка может быть введена, когда начальное положение вычисляется посредством алгоритма. В этом случае время Ts1' должно быть скорректировано посредством СРЕ, и способ коррекции, используемый в данном документе, является идентичным способу СРЕ в первом варианте осуществления.
На третьем этапе СРЕ передает первый символ и получает время, указывающее момент, когда первый символ передается.
Во время инициализации СРЕ передает первый символ. Когда выборка в конкретном положении первого символа записывается в буфер посредством СРЕ либо выборка считывается в конкретном положении этого символа из буфера посредством D/A-модуля, действие получения временных меток инициируется, чтобы считывать время локального тактового генератора Ts2.
На четвертом этапе СО принимает первый символ и получает время, указывающее момент, когда первый символ принимается.
СО принимает первый символ, передаваемый посредством СРЕ. Когда выборка в начальном положении первого символа записывается в буфер посредством СО, выборка считывается в конкретном положении этого символа из буфера посредством A/D-модуля, действие получения временных меток инициируется, чтобы считывать значение времени локального тактового генератора Tm2'. Поскольку СО вычисляет кадровую границу посредством определенного алгоритма, ошибка может быть введена, когда начальное положение вычисляется посредством алгоритма. В этом случае время считывания Tm2' должно быть скорректировано посредством СО, и способ коррекции, используемый здесь, является идентичным способу в первом варианте осуществления.
Конкретная точка, в которой инициируется действие получения временных меток, определяется посредством согласования между СО и СРЕ. Любое положение в первом символе может использоваться, например, начальное положение первого символа.
СО получает задержку цифровой приемной схемы СО, обозначенную посредством Δt4, и задержку аналоговой приемной схемы, обозначенную посредством Δt5, и обрабатывает временные метки, указывающие момент, когда первый символ принимается посредством СО-оборудования. В частности, Tm2=Tm2-Δt4-Δt5. Если задержка на цифровой прием не является фиксированной, она может исключаться, и, следовательно, Tm2=Tm2-Δt5.
На пятом этапе СО передает время Tm1 и время Tm2 в СРЕ через канал передачи сообщений, и СРЕ вычисляет смещение между тактовым генератором СРЕ и тактовым генератором СО.
СРЕ получает задержку цифровой приемной схемы Δt1', задержку аналоговой приемной схемы Δt2', задержку цифровой передающей схемы Δt4' и задержку аналоговой передающей схемы Δt5 СРЕ.
СРЕ вычисляет смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt1'+Δt2'+Δt3), и
Offset=Ts2-Tm2+Delay1=Ts2-Tm2+(Δt4'+Δt5'+Δt6).
Альтернативно, задержка на цифровой прием и задержка на цифровую передачу не являются фиксированными и тем самым исключаются, и затем СРЕ вычисляет смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt2'+Δt3), и
Offset=Ts2-Tm2+Delay1=Ts2-Tm2+(Δt5'+Δt6).
В этом процессе СРЕ также может обрабатывать временную метку Ts2, указывающую момент, когда второй символ передан, и временную метку Ts1, указывающую момент, когда первый символ принят. Например, Ts1=Ts1-Δt1'-Δt2' или Ts1=Ts1-Δt2'; Ts2=Ts2-Δt4'-Δt5' или Ts2=Ts2-Δt5'. Таким образом, СРЕ вычисляет смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-Δt3, и
Offset=Ts2-Tm2+Delay1=Ts2-Tm2+Δt6.
Смещение оценено на основе пропорции между Δt3 и Δt6 или допущения, что задержки Δt3 и Δt6 являются приблизительно идентичными.
На шестом этапе СРЕ регулирует тактовый генератор СРЕ согласно смещению.
СРЕ получает значение времени локального тактового генератора и регулирует время локального тактового генератора согласно полученному локальному времени блокировки и оцененному смещению.
В вышеописанных вариантах осуществления именно СРЕ регулирует локальный тактовый генератор СРЕ так, что тактовый генератор СРЕ синхронизируется с тактовым генератором СО. На практике СО также может регулировать локальный тактовый генератор СО так, что локальный тактовый генератор СО синхронизируется с тактовым генератором СРЕ, когда способ синхронизации является аналогичным способу синхронизации, в котором СРЕ регулирует локальный тактовый генератор.
Способ, описанный в вышеописанных вариантах осуществления, учитывает влияние частоты дискретизации и может быть выполнен множество раз.
Один вариант осуществления настоящего изобретения предоставляет систему многоантенной связи. Как показано на фиг.7, система связи включает в себя СО 100 и СРЕ 200.
СРЕ 200 передает символ и получает время Ts2, указывающее момент, когда первый символ передается. СРЕ 200 передает первый символ, который является DMT-кадром, определенным посредством согласования между СО 100 и СРЕ 200 на стадии инициализации. СО 100 и СРЕ 200 определяют посредством согласования точку в первом символе в качестве опорной точки, которая может быть в любом положении в первом символе. В дальнейшем в этом документе начальное положение первого символа рассматривается в качестве примера.
Когда СРЕ 200 записывает данные, дискретизированные в начальном положении первого символа, в буфер или считывает данные, дискретизированные в начальном положении, из буфера, СРЕ 200 инициирует действие получения временных меток и считывает значение времени для времени Ts2 локального тактового генератора СРЕ 200.
СО 100 принимает первый символ, передаваемый посредством СРЕ 200, и получает время Tm2, указывающее момент, когда первый символ принимается. Когда СО 100 записывает данные, дискретизированные в начальном положении первого символа, в буфер или считывает данные, дискретизированные в начальном положении первого символа, из буфера, СО 100 инициирует действие получения временных меток и считывает значение времени для времени Tm2' локального тактового генератора. Поскольку СО 100 восстанавливает кадровую границу при помощи определенного алгоритма, ошибка может возникать, когда начальное положение первого символа определяется, и, следовательно, время должно быть скорректировано посредством СО 100.
Согласно разности фаз между фазой точки приема и фазой контрольной точки синусоидального сигнала (или косинусоидального сигнала) в первом символе, СО 100 корректирует временную метку Tm2' для временной метки Tm2, указывающую момент, когда СО 100 должна принимать контрольную точку. Точка приема является сигнальной точкой, в которой первый символ первоначально принимается посредством СО 100, и вышеуказанная контрольная точка является сигнальной точкой, в которой первый символ первоначально передается посредством СРЕ 200.
Когда СО 100 корректирует время Tm2' согласно одному синусоидальному сигналу в первом символе:
- фаза соответствующей точки этого синусоидального сигнала является фиксированной (например, 0°, 45°, 90° или любой другой угол), когда СРЕ 200 инициируется так, что оно получает временную метку, таким образом, во время процесса коррекции СО 100 может рассматривать эту точку в качестве контрольной точки и получать фазу контрольной точки. В следующих вариантах осуществления 0° рассматривается в качестве примера.
СО 100 получает положение в этом синусоидальном сигнале, в котором СО 100 инициируется так, что оно получает временную метку (причем положение является точкой приема, в которой первый символ принимается посредством СО 100), и вычисляет время, прошедшее от фазы точки приема до фазы контрольной точки. Затем СО 100 регулирует время Tm2' для времени Tm2 согласно времени.
СО 100 также может выполнять коррекцию при помощи множества синусоидальных сигналов в этом символе. Когда СРЕ 200 записывает начальное положение первого символа в буфер или считывает начальное положение первого символа из буфера, каждый из синусоидальных сигналов в первом символе находится в конкретной точке. СО 100 рассматривает эти точки в качестве контрольных точек и знает соответствующие фазы контрольных точек в этих синусоидальных сигналах, когда СРЕ 200 задает временные метки. Например, контрольная точка в одном из синусоидальных сигналов располагается при 0°, в одном при 90°, в одном при 45° и т.д.
После приема первого символа СО 100 получает соответствующую точку приема в каждом из синусоидальных сигналов и получает фазу точки приема. Затем СО 100 вычисляет время, прошедшее от фазы точки приема до фазы контрольной точки. Время является смещением метки времени, заданной посредством СО 100 в каждом из синусоидальных сигналов. Фазы этих синусоидальных сигналов могут получаться через FFT в DMT-системе. Чтобы повышать точность оценки и уменьшать влияние шумов, смещение может получаться посредством усреднения после нескольких вычислений или посредством обучения FEQ после FFT. Поскольку FEQ выполняет компенсацию углового смещения, обучаемый FEQ-коэффициент также может использоваться для того, чтобы оценивать угловое смещение каждого из синусоидальных сигналов. Поскольку кадровая DMT-синхронизация может иметь ошибку, могут быть смещения между этими углами, полученными посредством СО 100 и СРЕ 200. Эти смещения имеют линейное соотношение с частотами синусоидальных сигналов, и наклон линейного соотношения непосредственно отражает ошибку кадровой синхронизации. Смещение каждого из синусоидальных сигналов может быть нарисовано на координатах, и эти смещения соединяются посредством прямой; и наклон прямой является просто смещением временных меток, заданных посредством СО 100, вследствие ошибки синхронизации. Посредством влияния таких факторов, как шумы, эти угловые ошибки, полученные посредством фактического вычисления, могут не находиться строго на прямой. Соответственно, СО 100 может вычислять оптимальную прямую для аппроксимации согласно определенному алгоритму оптимизации (например, методу наименьших квадратов). Следовательно, СО 100 вычисляет ошибку временных меток, заданных посредством СРЕ, и корректирует время Tm2' для времени Tm2 согласно этой ошибке.
Рассматривая признаки xDSL-системы, эти угловые ошибки также могут получаться при помощи FEQ-информации, и затем время Tm2' регулируется для времени Tm2 аналогичным образом.
СО 100 передает второй символ и получает время Tm1, указывающее момент, когда второй символ передается. Когда СО 100 записывает данные, дискретизированные в начальном положении второго символа, в буфер или считывает данные, дискретизированные в начальном положении, из буфера, СО 100 инициирует действие получения временных меток и считывает значение времени для времени Tm1 локального тактового генератора СО 100. Конкретная точка, в которой инициируется действие получения временных меток, также определяется посредством согласования между СО и СРЕ, и любое положение во втором символе может использоваться. В этом варианте осуществления начальное положение второго символа рассматривается в качестве примера.
СРЕ 200 принимает второй символ, передаваемый посредством СО 100, и получает время Ts1, указывающее момент, когда второй символ принимается. Когда СРЕ 200 записывает данные, дискретизированные в начальном положении второго символа, в буфер или считывает данные, дискретизированные в начальном положении второго символа, из буфера, СРЕ 200 инициирует действие получения временных меток и считывает значение времени для времени Ts1' локального тактового генератора. Поскольку СРЕ 200 восстанавливает кадровую границу посредством определенного алгоритма, СРЕ 200 корректирует время Ts1' для времени Ts1 способом, аналогичным способу СО 100.
СО 100 передает время Tm1 и время Tm2 в СРЕ 200 через канал передачи сообщений. Если СРЕ 200 не сохраняет задержку на передачу и задержку на прием СО 100, СО 100 передает, через взаимодействие с СРЕ 200, задержку на передачу и задержку на прием СО 100 в СРЕ 200 через канал передачи сообщений.
Задержка на передачу и задержка на прием СО 100 включают в себя задержку Δt1 цифровой передающей схемы, задержку Δt2 аналоговой передающей схемы, задержку Δt5' аналоговой приемной схемы и задержку Δt4' цифровой приемной схемы.
СРЕ 200 получает задержку на передачу и задержку на прием СРЕ 200, которые включают в себя задержку Δt1' цифровой передающей схемы, задержку Δt2' аналоговой передающей схемы, задержку Δt5 аналоговой приемной схемы и задержку Δt4 цифровой приемной схемы. Эти задержки могут считываться непосредственно из СРЕ 200.
СРЕ 200 вычисляет смещение между тактовым генератором СРЕ 200 и тактовым генератором СО 100 согласно Ts1, Ts2, Tm1, Tm2, задержке СО 100 и задержке СРЕ 200.
В частности, СРЕ 200 вычисляет смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt1+Δt2+Δt3+Δt1'+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt4+Δt5+Δt6+Δt5'+Δt4'),
или
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt2+Δt3+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt5+Δt6+Δt5'),
- при этом СРЕ 200 сохраняет математическое соотношение между задержкой Delay1 и задержкой Delay2. В частности, через статистику может быть известно то, что задержка Δt3 и задержка Δt6 приблизительно равны друг другу или имеют относительное соотношение, например Δt3=0,9Δt6 или Δt6=0,9Δt3.
После получения смещения СРЕ 200 получает значение времени локального тактового генератора и регулирует время локального тактового генератора согласно полученному времени локального тактового генератора и смещению.
В вышеуказанной системе связи именно СРЕ 200 регулирует время локального тактового генератора так, что локальный тактовый генератор СРЕ 200 синхронизируется с тактовым генератором СО 100. Альтернативно, СО 100 также может регулировать тактовый генератор СО 100 так, что тактовый генератор СРЕ 200 синхронизируется с тактовым генератором СО 100, процесс синхронизации которого является идентичным процессу синхронизации, в котором регулируется тактовый генератор СРЕ 200.
Настоящее изобретение дополнительно предоставляет xDSL-устройство, которое может использоваться для СО и СРЕ. Как показано на фиг.8, устройство включает в себя передающий блок 300, приемный блок 400 и процессорный блок 600.
Передающий блок выполнен с возможностью передавать первый символ и получать время Ts2, указывающее момент, когда первый символ передается.
Приемный блок выполнен с возможностью принимать второй символ, передаваемый посредством второго устройства, и получать время Ts1, указывающее момент, когда второй символ принимается; и получать время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства.
Процессорный блок выполнен с возможностью получать задержку DSL-устройства, вычислять смещение между тактовым генератором DSL-устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и задержке DSL-устройства и регулировать тактовый генератор DSL-устройства согласно смещению.
В частности, передающий блок 300 передает первый символ и получает время Ts2, указывающее момент, когда первый символ передается. Первый символ может быть обучающим сигналом, передаваемым во время стадии инициализации, и этот сигнал может быть DMT-кадром.
Когда передающий блок 300 записывает данные, дискретизированные в начальном положении первого символа, в буфер или считывает данные, дискретизированные в начальном положении первого символа, из буфера, передающий блок 300 инициирует действие получения временных меток и считывает локальное время Ts2.
Приемный блок 400 принимает второй символ, передаваемый посредством противоположного терминала, и получает время Ts1, указывающее момент, когда второй символ принимается. Второй символ может быть обучающим сигналом, передаваемым во время стадии инициализации.
Приемный блок 400 дополнительно включает в себя модуль получения и модуль коррекции. Модуль получения принимает второй символ, получает время Ts1' тактового генератора DSL-устройства и получает время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства.
Модуль коррекции согласно разности фаз между фазой точки приема и фазой контрольной точки сигнала во втором символе, корректирует временную метку Ts1' для временной метки Ts1, указывающую момент, когда модуль получения должен принимать контрольную точку, и получает временную метку Ts1 для использования в качестве времени, указывающего момент, когда второй символ принимается посредством модуля получения. Точка приема является сигнальной точкой, в которой второй символ первоначально принимается посредством модуля получения, и контрольная точка является сигнальной точкой, в которой второй символ первоначально передается посредством второго устройства.
Когда модуль получения записывает данные, дискретизированные в начальном положении второго символа, в буфер или считывает данные, дискретизированные в начальном положении второго символа, из буфера, модуль получения инициирует действие получения временных меток и считывает значение времени для времени Ts1' локального тактового генератора. Поскольку граница второго символа восстанавливается посредством определенного алгоритма, ошибка может возникать, когда граница размещается. Соответственно, модуль коррекции, согласно разности фаз между фазой точки приема и фазой контрольной точки сигнала во втором символе, корректирует временную метку Ts1' для временной метки Ts1, указывающую момент, когда модуль получения должен принимать контрольную точку.
Модуль коррекции получает положение в синусоидальном сигнале, при этом модуль инициируется так, что он получает временную метку, принимает это положение в качестве точки приема и вычисляет время, прошедшее от фазы точки приема до фазы контрольной точки. Затем согласно времени модуль коррекции корректирует время Ts1' для времени Ts1.
Модуль коррекции также может использовать множество синусоидальных сигналов во втором символе. Модуль коррекции знает соответствующие углы соответствующих точек (т.е. контрольных точек) в этих синусоидальных сигналах, когда второе устройство задает временные метки. Например, контрольная точка в одном из синусоидальных сигналов располагается при 0°, в одном при 90°; в одном при 45° и т.д. Следовательно, после того как второй символ принимается посредством модуля получения, модуль коррекции получает положения, в которых модуль получения задает временные метки, которые являются точками приема, и вычисляет время, прошедшее от фазы каждой из точек приема до фазы соответствующей контрольной точки. Углы этих синусоидальных сигналов могут получаться через FFT в DMT-системе. Чтобы повышать точность оценки и уменьшать влияние шумов, смещение может получаться посредством усреднения после нескольких вычислений или посредством обучения FEQ после FFT. Поскольку FEQ выполняет компенсацию углового смещения, обучаемый FEQ-коэффициент также может использоваться для того, чтобы оценивать угловое смещение каждого из синусоидальных сигналов. Поскольку кадровая DMT-синхронизация может иметь ошибку, могут быть смещения между углами, полученными посредством модуля коррекции, и углами, полученными посредством противоположного устройства. Эти смещения имеют линейное соотношение с частотами синусоидальных сигналов, и наклон линейного соотношения непосредственно отражает ошибку кадровой синхронизации. Следовательно, модуль коррекции может иллюстрировать смещение каждого из синусоидальных сигналов в системе координат и соединять эти смещения в прямую, наклон которой является просто смещением временных меток, заданных посредством СРЕ, вследствие ошибки синхронизации. Посредством влияния таких факторов, как шумы, эти угловые ошибки, полученные посредством фактического вычисления, могут не находиться строго на прямой. СРЕ может вычислять оптимальную прямую для аппроксимации согласно определенному алгоритму оптимизации (например, методу наименьших квадратов). Модуль коррекции вычисляет ошибку временной метки СРЕ и корректирует время Ts1' для времени Ts1 согласно этой ошибке.
Модуль коррекции также может постоянно размещаться в устройстве связи, независимом от приемного блока 400.
Приемный блок 400 также может принимать, через сообщение, информацию канала, передаваемую посредством второго устройства, включающую в себя время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, время Tm1, указывающее момент, когда второй символ передается посредством второго устройства, и задержку на передачу и задержку на прием второго устройства. Задержка на передачу и задержка на прием второго устройства включают в себя: задержку Δt1 цифровой передающей схемы, задержку Δt2 аналоговой передающей схемы, задержку Δt5' аналоговой приемной схемы и задержку Δt4' цифровой приемной схемы.
Второе устройство также может обрабатывать время Tm2 и время Tm1 при помощи данных задержки второго устройства. Таким образом, второе устройство только должно передавать время Tm1 и время Tm2, которые обрабатываются, в DSL-устройство; например, Tm1=Tm1+Δt1+Δt2 или Tm1=Tm1+Δt2, Tm2=Tm2-Δt5-Δt4 или Tm2=Tm2-Δt5.
DSL-устройство также может обрабатывать время Ts1 и время Ts2; т.е. Ts1=Ts1-Δt1'-Δt2' или Ts1=Ts1-Δt2'; Ts2=Ts2-Δt4'-Δt5' или Ts2=Ts2-Δt5'.
Процессорный блок 600 получает задержку DSL-устройства, вычисляет смещение между тактовым генератором локального устройства и тактовым генератором второго устройства согласно времени Ts2, полученному посредством передающего блока, Ts1, Tm2, Tm1, полученным посредством приемного блока, и задержке DSL-устройства и регулирует тактовый генератор DSL-устройства согласно смещению.
Задержка устройства DLS включает в себя: задержку Δt1' цифровой передающей схемы, задержку Δt2' аналоговой передающей схемы, задержку Δt5 аналоговой приемной схемы и задержку Δt4 цифровой приемной схемы, все из которых могут непосредственно получаться, когда DSL-устройство доставляется с завода.
Процессорный блок 600 вычисляет смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt1+Δt2+Δt3+Δt1'+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt4+Δt5+Δt6+Δt5'+Δt4')
или
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-(Δt2+Δt3+Δt2')
Offset=Ts2-Tm2+Delay2=Ts2-Tm2+(Δt5+Δt6+Δt5'); или
DSL-устройство и второе устройство, после обработки передаваемого/принимаемого символа, вычисляют смещение согласно следующему:
Offset=Ts1-Tm1-Delay1=Ts1-Tm1-Δt3, и
Offset=Ts2-Tm2+Delay1=Ts2-Tm2+Δt6.
Процессорный блок 600 считывает время локального тактового генератора и регулирует локальное время согласно времени локального тактового генератора и смещению.
Второе устройство может быть СО или СРЕ, и DSL-устройство также может использоваться в качестве СО или СРЕ.
Как можно видеть из вышеуказанных вариантов осуществления, согласно настоящему изобретению, посредством коррекции локального времени, соответствующего временным меткам, локальное время может точно считываться посредством приемного устройства, и смещение между тактовым генератором СРЕ и тактовым генератором СО может вычисляться так, что тактовый генератор СРЕ может регулироваться согласно смещению, чтобы достигать синхронизации между тактовым генератором СО и тактовым генератором СРЕ.
Специалисты в данной области техники могут понимать, что все или часть этапов в способах вышеописанных вариантов осуществления могут выполняться посредством программы, работающей на связанных аппаратных средствах. Программа может быть сохранена на машиночитаемом носителе хранения данных, включающем в себя постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), магнитный диск или компакт-диск (CD).
Вышеописанное раскрытие сущности - это только несколько вариантов осуществления настоящего изобретения. Тем не менее настоящее изобретение не ограничено только этими вариантами осуществления, и любые модификации, которые могут быть очевидными для специалистов в данной области техники, должны попадать в объем защиты настоящего изобретения.

Изобретение относится к технике связи и может быть использовано для временной синхронизации цифровой абонентской линии. Технический результат - повышение точности временной синхронизации. Способ временной синхронизации цифровой абонентской линии (DSL) заключается в передаче посредством первого устройства первого символа во второе устройство и получении времени Ts2, указывающего момент, когда первый символ передается, в приеме посредством первого устройства, второго символа, передаваемого посредством второго устройства, и получении времени Ts1, указывающего момент, когда второй символ принимается, получении посредством первого устройства времени Tm2, указывающего момент, когда первый символ принимается посредством второго устройства, и времени Tm1, указывающего момент, когда второй символ передается посредством второго устройства, вычислении посредством первого устройства смещения между тактовым генератором первого устройства и тактовым генератором второго устройства согласно временам Ts1, Ts2, Tm1 и Tm2 и регулировке посредством первого устройства тактового генератора первого устройства со смещением, чтобы синхронизироваться с тактовым генератором второго устройства, при этом времена Ts1, Ts2, Tm1 и Тm2 соответствуют передаче/приему выборки в начальном положении первого или второго символа. 3 н. и 22 з.п. ф-лы, 8 ил.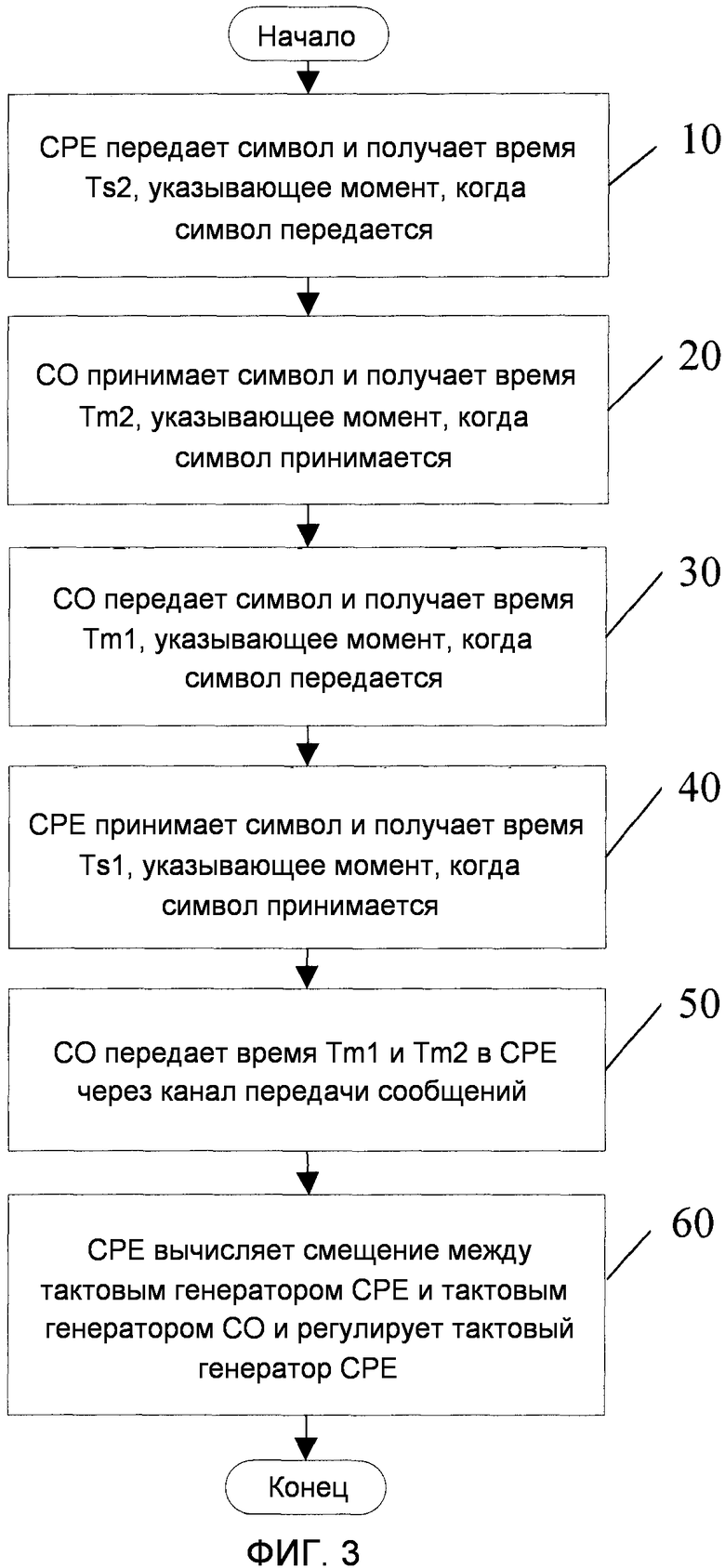
1. Способ временной синхронизации цифровой абонентской линии (DSL), содержащий этапы, на которых
принимают посредством первого устройства второй символ, передаваемый посредством второго устройства, и получают время Ts1, указывающее момент, когда второй символ принимается;
передают посредством первого устройства первый символ во второе устройство и получают время Ts2, указывающее момент, когда первый символ передается;
получают посредством первого устройства время Тm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства;
вычисляют посредством первого устройства смещение между тактовым генератором первого устройства и тактовым генератором второго устройства согласно временам Ts1, Ts2, Tm1 и Тm2; и
регулируют посредством первого устройства тактовый генератор первого устройства со смещением, чтобы синхронизироваться с тактовым генератором второго устройства,
при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством первого устройства, время Тm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством первого устройства.
2. Способ по п.1, дополнительно содержащий этап, на котором регулируют время Tm1 посредством добавления задержки, сформированной посредством второго устройства.
3. Способ по п.1, в котором вычисление посредством первого устройства смещения между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2, задержке Delay1 в тракте от второго устройства к первому устройству и задержке Delay2 в тракте от первого устройства ко второму устройству содержит этап, на котором
вычисляют посредством первого устройства смещение согласно следующему:
Offset=Ts1-Tm1-Delay1,
Offset=Ts2-Tm2+Delay2,
при этом задержка Delay1 в тракте вычисляется согласно задержке на передачу второго устройства и задержке на прием первого устройства, и задержка Delay2 в тракте вычисляется согласно задержке на передачу первого устройства и задержке на прием второго устройства.
4. Способ по п.3, в котором
вычисление задержки Delay1 в тракте согласно задержке на передачу второго устройства и задержке на прием первого устройства содержит этап, на котором вычисляют задержку Delay1 в тракте согласно задержке на аналоговую передачу второго устройства и задержке на аналоговый прием первого устройства;
вычисление задержки Delay2 в тракте согласно задержке на передачу первого устройства и задержке на прием второго устройства содержит этап, на котором вычисляют задержку Delay2 в тракте согласно задержке на аналоговую передачу первого устройства и задержке на аналоговый прием второго устройства.
5. Способ по п.4, в котором
вычисление задержки Delay1 в тракте согласно задержке на передачу второго устройства и задержке на прием первого устройства содержит этап, на котором вычисляют задержку Delay1 в тракте согласно задержке на аналоговую передачу второго устройства, задержке на цифровую передачу второго устройства, задержке на аналоговый прием первого устройства и задержке на цифровой прием первого устройства;
вычисление задержки Delay2 в тракте согласно задержке на передачу первого устройства и задержке на прием второго устройства содержит этап, на котором вычисляют задержку Delay2 в тракте согласно задержке на аналоговую передачу первого устройства, задержке на цифровую передачу первого устройства, задержке на аналоговый прием второго устройства и задержке на цифровой прием второго устройства.
6. Способ по п.1, в котором смещение между локальным тактовым генератором первого устройства и локальным тактовым генератором второго устройства оценивается при помощи времен Ts1, Ts2, Tm1 и Tm2.
7. Способ по п.1, в котором смещение вычисляется на основании допущения, что задержки на нисходящее и восходящее распространение витой пары являются приблизительно идентичными.
8. Способ по п.1, содержащий этап, на котором получают разность фаз между фазой точки приема и фазой контрольной точки, при этом точка приема является положением, в котором сигнал второго символа принимается посредством первого устройства, и контрольная точка является положением, в котором тот же самый сигнал второго символа передается посредством второго устройства.
9. Способ по п.1, в котором получение посредством первого устройства времени Ts1, указывающего момент, когда второй символ принимается, содержит этапы, на которых
считывают посредством первого устройства время Ts1' тактового генератора первого устройства, указывающее момент приема сигнала второго символа;
корректируют посредством первого устройства время Ts1' для момента Ts1 времени, указывающего момент, когда первое устройство должно принимать контрольную точку согласно разности фаз между фазой точки приема и фазой контрольной точки, при этом точка приема является положением, в котором сигнал второго символа принимается посредством первого устройства, и контрольная точка является положением, в котором сигнал второго символа передается посредством второго устройства; и
получают посредством первого устройства время Ts1 и используют его в качестве времени, указывающего момент, когда второй символ принимается.
10. Способ по п.9, в котором коррекция посредством первого устройства времени Ts1' для момента Ts1 времени, указывающего момент, когда первое устройство должно принимать контрольную точку согласно разности фаз между фазой точки приема и фазой контрольной точки, содержит этапы, на которых
когда множество сигналов во втором символе используется посредством первого устройства, получают посредством первого устройства фазу контрольной точки в каждом из сигналов;
получают посредством первого устройства фазу точки приема в каждом из сигналов;
вычисляют посредством первого устройства время, прошедшее от фазы точки приема до фазы контрольной точки в каждом из сигналов, чтобы получить множество значений времени;
получают посредством первого устройства смещение между метками времени, заданными посредством первого устройства согласно множеству значений времени; и
корректируют посредством первого устройства время Ts1' для времени Ts1 согласно смещению.
11. Способ по п.10, в котором получение посредством первого устройства времени Tm2, указывающего момент, когда первый символ принимается посредством второго устройства, содержит этапы, на которых
считывают посредством второго устройства время Тm2' тактового генератора второго устройства, указывающее момент приема сигнала первого символа;
корректируют посредством второго устройства время Тm2' для момента Тm2 времени, указывающего момент, когда второе устройство должно принимать контрольную точку согласно разности фаз между фазой в точке приема и в контрольной точке, при этом точка приема является положением, в котором сигнал первого символа принимается посредством второго устройства, и контрольная точка является положением, в котором сигнал первого символа передается посредством первого устройства; и
получают посредством второго устройства время Тm2 и используют его в качестве времени, указывающего момент, когда первый символ принимается.
12. Способ по п.11, в котором коррекция посредством второго устройства времени Тm2' для момента Тm2 времени, указывающего момент, когда второе устройство должно принимать контрольную точку согласно разности фаз между фазой точки приема и фазой контрольной точки, содержит этапы, на которых
при использовании множества сигналов в первом символе получают посредством второго устройства фазу контрольной точки в каждом из сигналов;
получают посредством второго устройства фазу точки приема в каждом из сигналов;
вычисляют посредством второго устройства время, прошедшее от фазы точки приема до фазы контрольной точки в каждом из сигналов, чтобы получить множество значений времени;
получают посредством второго устройства смещение между метками времени, заданными посредством второго устройства согласно множеству значений времени; и
корректируют посредством второго устройства время Тm2' для времени Тm2 согласно смещению.
13. Способ по п.1, в котором первый символ и второй символ являются кадрами с несколькими дискретными несущими (DMT).
14. Способ по п.1, в котором первое устройство является пользовательским оборудованием (СРЕ), а второе устройство является центральной станцией (СО).
15. Способ по п.1, в котором времена Тm2 и Тm1 отправляются в первое устройство по каналу передачи сообщений.
16. Способ по п.1, в котором времена Ts1, Ts2, Tm1 и Тm2 получают в конечной точке первого устройства витой пары или конечной точке второго устройства витой пары.
17. Устройство цифровой абонентской линии (DSL), содержащее
передающий блок, выполненный с возможностью передавать первый символ и получать время Ts2, указывающее момент, когда первый символ передается;
приемный блок, выполненный с возможностью принимать второй символ, передаваемый посредством второго устройства, и получать время Ts1, указывающее момент, когда второй символ принимается; получать время Тm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства;
процессорный блок, выполненный с возможностью получать задержку DSL-устройства, вычислять смещение между тактовым генератором DSL-устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Тm2 и регулировать тактовый генератор DSL-устройства согласно смещению, при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством первого устройства, время Тm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством первого устройства.
18. DSL-устройство по п.17, в котором приемный блок дополнительно выполнен с возможностью получения разности фаз между фазой точки приема и фазой контрольной точки, при этом точка приема является положением, в котором сигнал второго символа принимается посредством первого устройства, и контрольная точка является положением, в котором идентичный сигнал второго символа передается посредством второго устройства.
19. DSL-устройство по п.17, в котором приемный блок дополнительно содержит модуль получения и модуль коррекции, при этом
модуль получения принимает сигнал второго символа, получает время Ts1' тактового генератора DSL-устройства и получает время Тm2, указывающее момент, когда первый символ принимается посредством второго устройства, и время Tm1, указывающее момент, когда второй символ передается посредством второго устройства;
модуль коррекции корректирует время Ts1' для момента Ts1 времени, указывающего момент, когда модуль получения должен принимать контрольную точку согласно разности фаз между фазой точки приема и фазой контрольной точки, при этом точка приема является положением, в котором сигнал второго символа принимается посредством модуля получения, контрольная точка является положением, в котором сигнал второго символа передается посредством второго устройства, и модуль коррекции получает время Ts1 и использует его в качестве времени, указывающего момент, когда второй символ принимается посредством модуля получения.
20. DSL-устройство по п.19, в котором коррекция посредством модуля коррекции времени Ts1' для момента Ts1 времени, указывающего момент, когда модуль получения должен принимать контрольную точку согласно разности фаз между фазой точки приема и фазой контрольной точки, содержит
при использовании множества сигналов во втором символе получение посредством модуля коррекции фазы контрольной точки в каждом из сигналов;
получение посредством модуля коррекции фазы точки приема в каждом из сигналов;
вычисление посредством модуля коррекции времени, прошедшего от фазы точки приема до фазы контрольной точки в каждом из сигналов, чтобы получить множество значений времени;
получение посредством модуля коррекции смещения времени Ts1', полученного посредством модуля получения согласно множеству значений времени; и
коррекцию посредством модуля коррекции времени Ts1' для времени Ts1 согласно смещению.
21. DSL-устройство по п.17, в котором вычисление посредством процессорного блока смещения между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2, задержке Delay1 в тракте от второго устройства к первому устройству и задержке Delay2 в тракте от первого устройства ко второму устройству, вычисление смещения между тактовым генератором первого устройства и тактовым генератором второго устройства содержит:
Offset=Ts1-Tm1-Delay1,
Offset=Ts2-Tm2+Delay2,
при этом задержка Delay1 в тракте вычисляется согласно задержке на передачу второго устройства и задержке на прием первого устройства, и задержка Delay2 в тракте вычисляется согласно задержке на передачу первого устройства и задержке на прием второго устройства.
22. DSL-устройство по п.21, в котором
вычисление задержки Delay1 в тракте согласно задержке на передачу второго устройства и задержке на прием первого устройства содержит: вычисление задержки Delay1 в тракте согласно задержке на аналоговую передачу второго устройства и задержке на аналоговый прием первого устройства;
вычисление задержки Delay2 в тракте согласно задержке на передачу первого устройства и задержке на прием второго устройства содержит вычисление задержки Delay2 в тракте согласно задержке на аналоговую передачу первого устройства и задержке на аналоговый прием второго устройства.
23. DSL-устройство по п.17, в котором времена Ts1, Ts2, Tm1 и Tm2 получают в конечной точке первого устройства витой пары или конечной точке второго устройства витой пары.
24. DSL-устройство по п.17, в котором DSL-устройство является пользовательским оборудованием (СРЕ).
25. Система для синхронизации времени цифровой абонентской линии (DSL), содержащая первое устройство и второе устройство, в которой
первое устройство передает первый символ во второе устройство и принимает второй символ, передаваемый посредством второго устройства, получает время Ts2, указывающее момент, когда первый символ передается посредством первого устройства, время Ts1, указывающее момент, когда второй символ принимается посредством первого устройства, время Tm1, указывающее момент, когда второй символ передается посредством второго устройства, и время Tm2, указывающее момент, когда первый символ принимается посредством второго устройства, вычисляет смещение между тактовым генератором первого устройства и тактовым генератором второго устройства согласно Ts1, Ts2, Tm1, Tm2 и регулирует тактовый генератор первого устройства согласно смещению, чтобы синхронизироваться с тактовым генератором второго устройства; и
второе устройство принимает первый символ и передает второй символ, получает время Tm1 и время Tm2 и передает время Tm1 и время Tm2 в первое устройство,
при этом время Ts2 является моментом, когда выборка в начальном положении первого символа передается посредством первого устройства, время Тm2 является моментом, когда та же самая выборка в начальном положении первого символа принимается посредством второго устройства, время Tm1 является моментом, когда выборка в начальном положении второго символа передается посредством второго устройства, и время Ts1 является моментом, когда та же самая выборка в начальном положении второго символа принимается посредством первого устройства.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6137839 A, 24.10.2000 | |||
| CN 1282477 A, 31.01.2001 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАПРАВКИ ХОЛСТОВ В ПЛЮЩИЛЬНЫЕ ВАЛЫ ТРЕПАЛЬНОЙ МАШИНЫ | 1928 |
|
SU19981A1 |
| CN 101247169 A, 20.08.2008 | |||
| US 2004008661 A1, 15.01.2004 | |||
| US 7068746 В1, 27.06.2006 | |||
| SUNGWON LEE | |||
| Съемная ручка для утюгов | 1925 |
|
SU1588A1 |
| IEEE COMMUNICATIONS LETTERS | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

