Изобретение относится к области испытательной и измерительной техники и позволяет определять координаты объекта в характерных точках траектории движения или на местности.
Известен способ используемый в работе «Устройства для определения местоположения объекта», патент DE №4314216A1, МПК G01S 5/06, опубл. 03.11.1994, позволяющий с достаточно высокой точностью определять пространственные координаты объекта. Согласно данному способу определяют координаты локализуемого объекта, например, транспортного средства на дорожном участке при помощи четырех приемных элементов Еik, один из которых BE, служит в качестве опорного приемного элемента. Путем осреднения произведения из сигнала каждого из приемных элементов Еik и сопряженного комплексного приемного сигнала опорного приемного элемента BE определяют разность rik пути прохода сигнала от объекта до соответствующего приемного элемента Еik по отношению к пути прохода r+rik от объекта до опорного приемного элемента. На основании полученных данных для приемного элемента Еik определяют сигнальные разности rik путей прохода и для известных координат Yik, Zik места расположения приемного элемента Eik применительно к заданной системе координат X, Y, Z координаты Xz, Yz, Zz места расположения локализируемого объекта. Как следует из описания, этот способ относится в первую очередь к области радиотехники и основан на приеме строго детерминированных сигналов, в частности с известной частотой и фазой. Это можно обеспечить излучением сигнала с требуемыми характеристиками с помощью передающей антенны в направлении предполагаемого местоположения объекта и организации последующего приема отраженного сигнала. Такой вариант применения способа требует наличия априорной информации о границах области ожидаемого местоположения (или появления) объекта. Кроме того, приемные элементы должны быть специальным образом «нацелены» на эту область. Другим вариантом реализации этого способа может быть прием сигнала, излучаемого самим объектом. В этом случае необходима установка на объект устройства, обеспечивающего излучение сигнала с требуемыми характеристиками, в направлении приемных элементов и ориентация последних на область ожидаемого нахождения объекта. В случае, когда излучаемый сигнал имеет недетерминированные характеристики, использование этого способа представляется затруднительным. Например, когда излучаемый объектом сигнал имеет импульсный широкополосный или гармонический характер, его спектр будет представлен рядом частот, который может не содержать гармоники ожидаемой частоты.
Известен способ, реализуемый при работе «Системы для определения местоположения объекта», патент US №5446701, МПК G01S 3/80, опубл. 29.08.1995, согласно которому при определении местоположения объекта устанавливается область нахождения объекта, графически представляемая с помощью двух цилиндрических координатных систем, имеющих соответствующие точки начала координат. В пределах установленной области датчики, регистрирующие возмущение воздушной среды, размещаются в трех измерительных точках (ИТ) с известными координатами. Датчиками регистрируют сигнал от объекта, определяют моменты времени ti, соответствующие достижению сигналом каждого из датчиков и интервалы времени Δti, соответствующие задержке распространения сигнала относительно одного из датчиков, выбранного за базовый. Затем определяют, каким координатам первой координатной системы соответствует первое время задержки, и каким координатам второй координатной системы соответствует второе время задержки. После этого оценивают соответствие найденных координат точек некоторому допуску. В данном способе использование трех датчиков позволяет определить только две координаты объекта, что представляет информацию о местоположении объекта на плоскости, определяемой этими датчиками. В преимущественном варианте использования этот способ позволяет определять координаты объекта только при нахождении его в предопределенной области. Этот способ как наиболее близкий по технической сущности выбран в качестве прототипа.
Заявляемый способ направлен на решение технической задачи определения пространственных координат объекта в характерных точках траектории полета или на местности.
Техническим результатом использования изобретения является получение пространственных (горизонтальных и высотной) координат объекта, расширение телесного угла определения координат до 4π (возможность определения координат объекта с любого направления относительно центра фигуры, образуемой датчиками), повышение точности определения координат.
Техническая задача решается следующим образом. Способ определения координат объекта включает размещение датчиков, регистрирующих возмущение воздушной среды, в ИТ с известными координатами, регистрацию датчиками сигнала от объекта, определение моментов времени ti, соответствующих достижению сигналом каждого из датчиков, и интервалов времени Δti, соответствующих задержке распространения сигналов относительно одного из датчиков, выбранного за базовый, определение координат объекта на основании полученных данных и координат ИТ. В отличие от прототипа в заявляемом способе датчики размещают не менее чем в четырех ИТ с известными координатами, образующих пространственную фигуру. Определяют расстояния Rzi, пройденные сигналом от объекта за определенные ранее интервалы Δti. В области поиска задают точки Sk, для которых определяют расстояния RSki до каждого из датчиков. Rzi и RSki определяют с учетом данных о состоянии невозмущенной воздушной среды. За координаты объекта принимают координаты такой точки Sk, для которой выражение

принимает минимальное значение.
В (1) RSki - расстояние от i-ого датчика до некоторой точки Sk, принадлежащей области поиска, i=1÷N; N≥4; Rk - расстояние от базового датчика до точки Sk; Rzi - расстояния, пройденные сигналом от объекта за интервалы времени Δti.
Размещение датчиков не менее чем в четырех измерительных точках позволяет определить пространственные координаты объекта. В случае, когда датчики расположены в одной плоскости, телесный угол определения пространственных координат составляет 2π. При этом решениями, минимизирующими выражение (1), будут координаты двух точек, симметричных относительно плоскости, образуемой измерительными точками. В контексте задачи не всегда возможно выбрать подходящую из указанных точек. Устранить это позволяет размещение измерительных точек в виде пространственной фигуры, что дает возможность расширить телесный угол определения пространственных координат до 4π и однозначно определить пространственные координаты объекта в каком бы направлении не находился объект относительно пространственной фигуры. Таким образом, физическая природа распространения воздушных возмущений и размещение датчиков в виде пространственной фигуры расширяют область определения координат заявляемого способа до размеров, определяемых дальностью распространения регистрируемых воздушных возмущений.
Использование данных о состоянии невозмущенной воздушной среды для определения Rzi и RSki позволяет использовать в расчетах фактическую скорость распространения сигнала для конкретных условий и этим повысить точность определения координат.
Использование выражения (1) позволяет использовать для расчета численные методы решения: метод случайного поиска, наименьших квадратов, Ньютона, градиентного спуска. Например, метод Ньютона применительно к этой задаче имеет сходимость 10-30 итераций в зависимости от точности начальных условий поиска.
Сопряжение датчиков с ПЭВМ посредством адаптера сбора данных позволяет в реальном времени определять координаты источников возмущения воздушной среды и создать систему мониторинга.
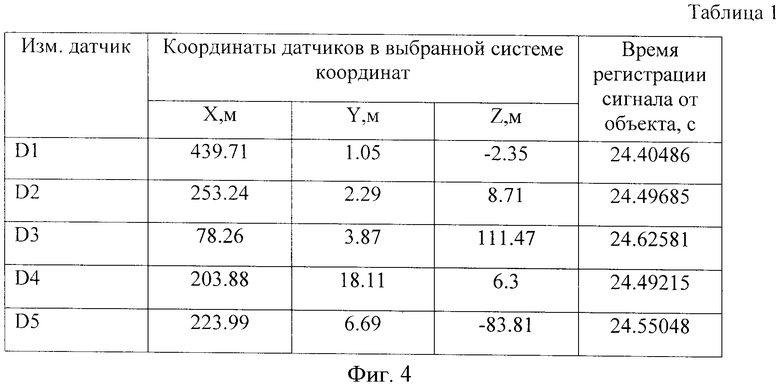
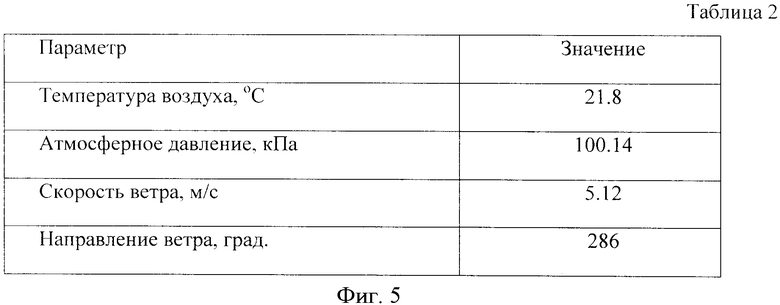
Способ поясняется чертежами. На фиг.1 приведена схема постановки измерений, на фиг.2 - графики измерений возмущений воздушной среды, на фиг.3 - сопоставление результатов определения высоты объекта в характерных точках траектории заявляемым способом и непрерывного измерения высоты барометрическим методом, на фиг.4 - таблица 1 координат измерительных точек в выбранной системе пространственных координат и время регистрации сигнала от объекта каждым из датчиков, на фиг.5 - таблица 2 параметров невозмущенной воздушной среды.
Способ определения координат объекта реализуется следующим образом. Выбирают схему размещения ИТ, которая обладает наименьшей чувствительностью к случайным и систематическим ошибкам способа (см. фиг.1).
Число размещаемых ИТ - не менее четырех ИТ, не лежащих в одной плоскости, образующих пространственную фигуру (1, 2, 3, 4 на фиг.1; пятый датчик, участвующий в расчетах, на фиг.1 не показан).
Перед проведением испытаний выполняют геодезическую привязку всех ИТ к системе пространственных координат испытательной площадки (полигона) 6.
В каждой ИТ устанавливают датчик, регистрирующий возмущение воздушной среды от объекта 5, который может быть запущен, например, с площадки 6.
Датчики подключают к автономному устройству или через адаптер сбора данных к ПЭВМ (на фиг.1 не показаны).
По результатам измерений получают следующие данные (см. фиг.2).
Один из датчиков выбирают за базовый, например датчик dl, размещенный в ИТ1. Определяют времена прихода сигнала от объекта до каждого из датчиков (t1, t2, t3, t4, t5).
Определяют интервалы времени Δti, соответствующие задержке распространения сигнала относительно одного из датчиков, выбранного за базовый: Δt2=t2-t1, Δt3=t3-t1 и т.д.
Определяют расстояния Rzi (Rz2=Cзв*Δt2, Rz3=Cзв*Δt3, Rz4=Cзв*Δt4, Rz4, Rz5=C3B*Δt5), пройденные сигналом от объекта за соответствующие интервалы времени Δti, с учетом данных о невозмущенной воздушной среде, т.е. с учетом температуры воздуха (см. табл.2 фиг.5).
В области поиска задают точки Sk(XSk, YSk, ZSk), для каждой из которых определяют расстояния RSki до каждого из датчиков (до датчика d1 расстояние RSk1=((XSk-Х1)2+(YSk-Y1)2+(ZSk-Z1)2)1/2, для датчика d2 расстояние RSk2=((ХSk-Х2)2+(YSk-Y2)2+(ZSk-Z2)2)1/2 и т.д.).
С использованием расстояний Rzi, RSki и известных координат ИТ определяют координаты объекта 5. За координаты объекта 5 принимают координаты такой точки Sk, для которой выражение (1) принимает минимальное значение.
Для отработки и применения предлагаемого способа использовались общеизвестные технические средства:
1. В случае возмущений воздушной среды, имеющих импульсный характер (воздушная ударная волна) - датчики измерения импульсных давлений воздушной среды (ВНИИЭФ, ДИДОI или ENDEVCO, тип 8510В-1).
2. В случае регистрации акустических возмущений воздушной среды - микрофоны динамические МД-380 или аналогичные.
3. Адаптер сбора аналоговых данных с количеством измерительных каналов не менее 4 (ADLINK Technology Inc., модуль аналогового ввода-вывода DAQ-2010).
4. Экранированные измерительные линии, соединяющие датчики и схему запуска с регистратором (кабель ГПЭУ 6/012).
Работоспособность способа подтверждена в экспериментах по его отработке, в которых пространственные координаты размещения объекта были известны заранее. Кроме того, он успешно применялся в полигонных условиях. В экспериментах с объектами, оснащенными барометрическим датчиком измерения высоты подъема способ показал хорошее совпадение результатов с измерениями высоты подъема барометрическим датчиком, установленным на изделии. Сопоставление результатов измерения высоты приведено на фиг.3.
Решение задачи определения координат объекта производилось следующим образом. Согласно заявляемому способу была выбрана схема установки ИТ, количество ИТ - 5. В каждой ИТ было размещено по одному микрофону динамическому МД-380 и выполнена геодезическая привязка ИТ к системе пространственных координат измерительной площадки (см. фиг.4). По окончании проверок был произведен запуск объекта 5.
Датчиками в ИТ1, ИТ2, ИТ3, ИТ4, ИТ5 были зарегистрированы сигналы от объекта 5 в виде возмущения воздушной среды, вызванного срабатыванием элементов объекта 5.
Определены моменты времени t1, t2, t3, t4, t5, соответствующие достижению сигналом каждого из датчиков, соответственно d1, d2, d3, d4, d5 (см. фиг.2 и табл.1 фиг.4).
Датчик d1 выбран за базовый.
С использованием величин t1, t2, t3, t4, t5 определены интервалы времени Δti, соответствующие задержке распространения сигнала относительно одного из датчиков, выбранного за базовый: Δt2=0.09199 c, Δt3=0.22095 c, Δt4=0.08729 с, Δt5=0.14562 с (в данном случае относительно датчика dl, установленного в ИТ1).
С использованием интервалов времени Δti и данных о состоянии невозмущенной воздушной среды (см. табл.2 фиг.5) были определены расстояния, преодоленные сигналами за интервалы задержек Δt2, Δt3, Δt4, Δt5. В простейшем случае может быть использована формула Rzi=Cзв*Δti, где скорость звука (Сзв) определяется по формуле Сзв=20.084*[Тв+273]1/2, Тв - температура воздушной среды. Эта формула известна из технической литературы.
С использованием значений Rzi и известных координат ИТ определили координаты объекта. В расчете были учтены ветровой снос и градиент температуры, влияющий на скорость распространения возмущений в воздушной среде (см. табл.2 фиг.5).
Расчет выполнялся следующим образом. На каждой итерации выбирается точка Sk(XSk, YSk, ZSk) пространства с известными координатами и определяются расстояния RSk от точки Sk до каждого из датчиков. На фиг.1 в качестве примера пунктиром показана одна из точек Sk - точка S1. Для нее определяются величины R1 - расстояние от точки S1 до базовой точки 1, расстояния RS12, RS13, RS14, RS15 (RS15 на фиг.1 не показано). Выражение (1) для точки S1 имеет вид
(RS12-(R1+Rz2))2+(RS13-(R1+Rz3))2+(RS14-(R1+Rz4))2+(RS15-(R1+Rz5))2.
Расчет выполнялся на ПЭВМ методом градиентного поиска. Вычислялся градиент функции, представленной выражением (1), который определяет направление скорейшего возрастания функции. Для искомых координат (XSk, YSk, ZSk) делается приращение в направлении антиградиента (скорейшего убывания функции). Расчет прекращается, когда последующие итерации не уменьшают значение функции. Координаты точки Sk(XSk, YSk, ZSk), при которых было достигнуто минимальное значение функции, представленной выражением (1), принимаются за координаты объекта. Искомые координаты объекта составили Х=564 м, Y=1186 м, Z=169 м. Как видно из фиг.3, эти данные хорошо согласуются с результатами измерения высоты барометрическим датчиком измерения высоты, установленным на изделии.
При практическом применении способа неоднократно подтверждена надежность регистрации возмущений воздушной среды на расстояниях до 3000 м и технический результат, заключающийся в надежном определении пространственных (горизонтальных и высотной) координат ОИ, расширении телесного угла определения координат до 4π (возможность определения координат объекта с любого направления относительно центра фигуры, образуемой датчиками), повышении точности определения координат за счет использования в расчетах параметров невозмущенной воздушной среды и параметров стандартной атмосферы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА | 2015 |
|
RU2610908C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2006 |
|
RU2339052C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВСТРЕЧИ ОБЪЕКТА ИСПЫТАНИЯ С ПРЕГРАДОЙ | 2014 |
|
RU2547839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2005 |
|
RU2285890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2009 |
|
RU2394204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА ПРИ ДВИЖЕНИИ ОБЪЕКТА ОБСТРЕЛА | 2018 |
|
RU2704955C1 |
| Способ испытания термобарической боевой части | 2024 |
|
RU2838827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУГАСНОГО ДЕЙСТВИЯ ОБЪЕКТА ИСПЫТАНИЙ | 2013 |
|
RU2519614C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006794C1 |


Изобретение позволяет определять координаты объекта в характерных точках траектории движения или на местности. Способ определения координат объекта включает размещение датчиков, регистрирующих возмущение воздушной среды, в измерительных точках с известными координатами. Датчики размещаются не менее чем в четырех измерительных точках. Датчиками регистрируют сигнал от объекта, определяют моменты времени ti, соответствующие достижению сигналом каждого из датчиков, и интервалы времени Δti, соответствующие задержке распространения сигнала относительно одного из датчиков, выбранного за базовый. Определяют расстояния Rzi, пройденные сигналом от объекта за определенные ранее интервалы времени Δti, с учетом данных о состоянии невозмущенной воздушной среды. С использованием расстояний Rzi и координат измерительных точек находят координаты объекта следующим образом. В области поиска задают точки Sk, для которых определяют расстояния RSki до каждого из датчиков. Rzi и RSki определяют с учетом данных о состоянии невозмущенной воздушной среды. За координаты объекта принимают координаты такой точки Sk, для которой выражение Σ(RSki-(Rk+Rzi))2 принимает минимальное значение. В выражении RSki - расстояние от i-ого датчика до некоторой точки Sk, принадлежащей области поиска, i=1÷N; N≥4; Rk - расстояние от базового датчика до точки Sk; Rzi - расстояния, пройденные сигналом от объекта за интервалы времени Δti. Достигаемым техническим результатом изобретения является повышение точности определения координат объекта. 5 ил.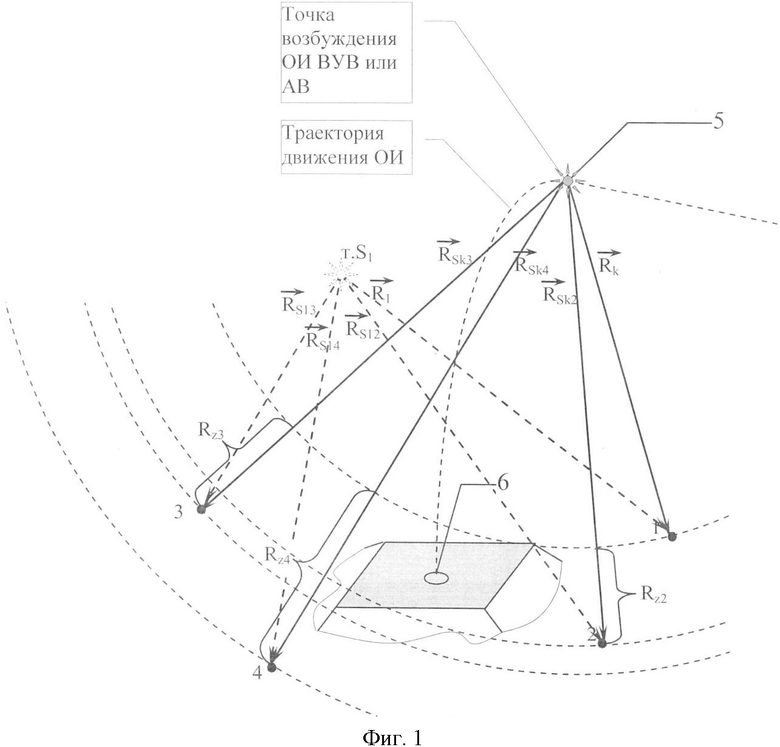
Способ определения координат объекта, включающий размещение датчиков, регистрирующих возмущение воздушной среды, в измерительных точках с известными координатами, регистрацию датчиками сигнала от объекта, определение моментов времени ti, соответствующих достижению сигналом каждого из датчиков, и интервалов времени Δti, соответствующих задержке распространения сигнала относительно одного из датчиков, выбранного за базовый, определение координат объекта на основании полученных данных и координат измерительных точек, отличающийся тем, что датчики размещают не менее чем в четырех измерительных точках с известными координатами, образующих пространственную фигуру, определяют расстояния Rzi, пройденные сигналом от объекта за определенные ранее интервалы времени Δti, в области поиска задают точки Sk, для которых определяют расстояния RSki до каждого из датчиков, при этом Rzi и RSki определяют с учетом данных о состоянии невозмущенной воздушной среды, а за координаты объекта принимают координаты такой точки Sk, для которой выражение Σ(RSki-(Rk+Rzi))2 имеет минимальное значение,
где RSki - расстояние от i-ого датчика до некоторой точки Sk, принадлежащей области поиска, i=1÷N; N≥4;
Rk - расстояние от базового датчика до точки Sk;
Rzi - расстояния, пройденные сигналом от объекта за интервалы времени Δti.
| US 5446701 A, 29.08.1995 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| Способ определения координат дефектов в одномерных объектах | 1985 |
|
SU1272219A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ИСПЫТАНИЙ В МОМЕНТ ЕГО ПОДРЫВА | 2005 |
|
RU2285890C1 |
| GB 1371173 А, 23.10.1974 | |||
| US 5241518 А, 31.08.1993 | |||
| US 4031501 А, 21.06.1977. | |||

