Хорошо известны и широко используются лифты, содержащие кабину, а также противовес, приводной двигатель, приводной блок, подающий питание к приводному двигателю и управляющий им, и аварийный источник питания. При нормальной работе приводной блок подключен к сети и получает от нее питание, которое подает к приводному двигателю, управляя, таким образом, перемещением кабины лифта в соответствии с командами, полученными от системы управления лифта. Лифт такого типа раскрыт, например, в заявке WO 2005/040027 А1, заявителем по которой является заявитель настоящей заявки и которая полностью включена в настоящее описание по ссылке. В заявках РСТ/ЕР 2005/000174 и РСТ/ЕР 2005/000175, заявителем по которым также является заявитель настоящей заявки и которые полностью включены в настоящее описание по ссылке, раскрыты похожие объекты. Как известно из указанного уровня техники, при аварийной ситуации для проведения спасательного рейса, например рейса на пониженной скорости к ближайшей подходящей площадке, питание можно подавать от аварийного источника питания, который обычно содержит перезаряжаемую аккумуляторную батарею. Перезаряжаемая аккумуляторная батарея аварийного источника питания обычно поддерживается в максимально заряженном состоянии с целью обеспечения достаточной емкости для выполнения какой-либо аварийной работы. Несмотря на это существует потребность в аккумуляторной батарее, имеющей достаточную емкость для обеспечения надежной доставки кабины лифта к ближайшей подходящей площадке. Однако аккумуляторные батареи являются относительно дорогими, в связи с чем существует "потребность в аккумуляторной батарее, имеющей минимально возможные размеры.
Традиционные приводные блоки содержат электрически переключаемые полупроводники, такие как МОП-транзисторы или биполярные транзисторы с изолированным затвором (БТИЗ), которые создают низкочастотные шумы при работе с частотой переключения в спектре низкочастотных шумов. Таким образом, традиционные приводные блоки работают с частотой переключения в таком диапазоне, который позволяет избежать образования раздражающего шума в здании и/или кабине лифта.
Таким образом, целесообразно предложить способ эксплуатации лифта в аварийном режиме и соответствующий лифт, который позволяет уменьшить размер аккумуляторной батареи для аварийной подачи электроэнергии.
Приведенные варианты реализации настоящего изобретения включают способ эксплуатации лифта в аварийном режиме, содержащего кабину, приводной двигатель и приводной блок, подающий питание на приводной двигатель и управляющий им, и аварийный источник питания, причем приводной блок имеет заданную нормальную рабочую частоту переключения, а согласно способу:
a) подают питание от аварийного источника питания,
b) переводят приводной блок в аварийный режим,
c) определяют характеристику фактических условий аварийной эксплуатации,
d) устанавливают частоту переключения приводного блока в зависимости от указанной характеристики фактических условий аварийной эксплуатации.
Другие приведенные варианты реализации настоящего изобретения включают лифт, содержащий кабину, приводной двигатель и приводной блок, который соединен с приводным двигателем и который выполнен с возможностью подачи питания на приводной двигатель и управления им, и аварийный источник питания, причем приводной блок имеет заданную нормальную рабочую частоту переключения, а лифт выполнен с возможностью в аварийной ситуации:
a) получать питание от аварийного источника питания,
b) переводить приводной блок в аварийный режим,
c) определять характеристику фактических условий аварийной эксплуатации,
d) устанавливать частоту переключения приводного блока в зависимости от указанной характеристики фактических условий аварийной эксплуатации.
Ниже представлено подробное описание вариантов реализации настоящего изобретения со ссылками на сопроводительные чертежи, на которых:
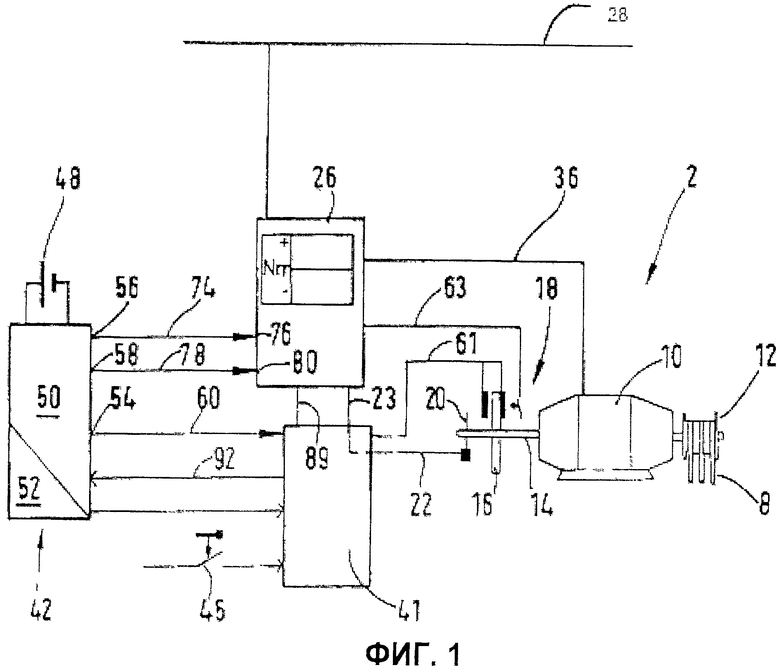
фиг.1 показывает схематический вид частей лифта согласно первому варианту реализации настоящего изобретения,
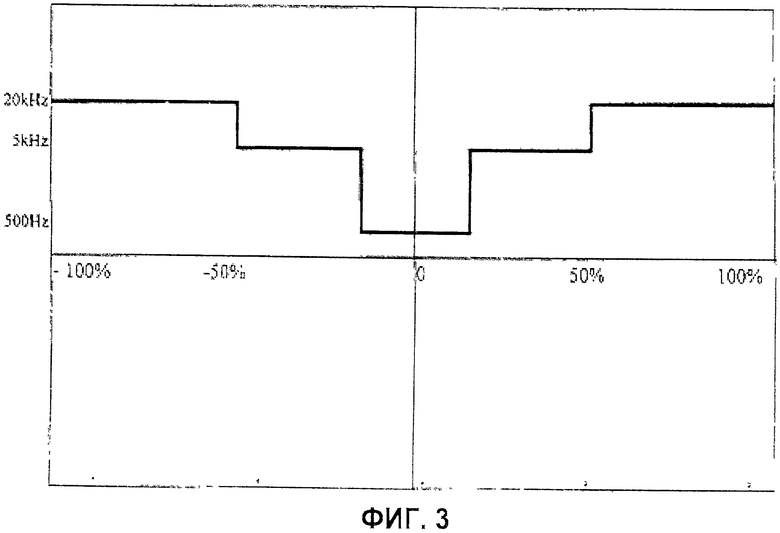
фиг 2 подробно показывает схематический вид лифта согласно второму варианту реализации настоящего изобретения,
фиг.3 иллюстрирует график, на котором показаны разные частоты переключения в зависимости от фактических условий аварийной работы.
На фиг 1 и 2 показаны похожие варианты реализации. На всех чертежах одинаковые элементы обозначены одинаковыми ссылочными номерами.
На фиг.1 показана часть лифта 2, содержащая подъемный трос 8, приводимый в действие приводным двигателем 10 посредством тягового шкива 12. Трос 8 может включать обычные канаты или стальные ремни с покрытием и т.д. Двигатель 10 приводит в действие шкив 12 напрямую или через зубчатую передачу. С тяговым шкивом 12 соединен тормозной диск 16, который в настоящем варианте реализации прикреплен к валу 14 двигателя 10. Тормозной диск 16 является частью тормоза 18.
К валу 14 двигателя 10 также прикреплен диск 20 датчика положения, передающий управляющую информацию о положении или скорости по линии 22 к сервисной панели 41 и через панель 41 к приводному блоку 26. Блок 26 подает питание к двигателю 10 по линии 36. При нормальной работе блок 26 подсоединен к электрической сети 28. Блок 26 будет описан далее со ссылкой на фиг.2.
Вместо диска 20 могут быть установлены два кодирующих устройства, одно устройство с высоким разрешением для работы в нормальном режиме и второе устройство, соединенное с панелью 41, для работы в аварийном режиме.
Лифт 2 также содержит аварийный источник 42 питания. Источник 42 содержит перезаряжаемую аккумуляторную батарею 48 и цепь 52 защитной сигнализации и зарядки. Кроме того, источник 42 может содержать усилитель 50 напряжения для подачи разного выходного напряжения. Усилитель 50 может быть необходим для подачи более высокого выходного напряжения, чем обычное напряжение батареи 48. Согласно настоящему варианту реализации аварийный источник питания подает три разных выходных напряжения, т.е. низкое напряжение к выходу 54, высокое напряжение к выходу 56 и промежуточное напряжение к выходу 58. В зависимости от конкретного лифта величина напряжений может меняться. Однако обычно напряжение постоянного тока для подъема тормоза 18 и питания электрических управляющих устройств, например регулятора скорости и т.д., составляет 24 В, напряжение переменного тока для питания цепи безопасности лифта составляет 110 В, а напряжение постоянного тока для питания блока 26 и затем двигателя 10 составляет 520 В (обычное напряжение переменного тока в промежуточном контуре 98, который описан ниже, составляет 400 В). Напряжение для питания блока 26 зависит от особенностей его конструкции. Обычно для питания блока 26 требуется некоторое минимальное входное напряжение, даже несмотря на то, что выходное напряжение для питания двигателя 10 при работе в аварийном режиме будет значительно меньше.
Как показано на фиг.1, низкое напряжение подается по линии 60 к панели 41 и от нее может быть распределено к тормозу 18 по линии 61, соединяющей панель 41 с тормозом 18. В другом варианте низкое напряжение подается по линии 60 к блоку 26 по линии 63, соединяющей указанный блок с тормозом 18. В этом случае блок 26 может управлять тормозом 18. Вместо двух может быть образована только одна линия 61 или 63. Линия 89 передает от панели 41 к блоку 26 низкое напряжение и/или коммуникационную информацию.
Блок 26 предпочтительно выполнен с возможностью определения параметров движения кабины лифта, т.е. положения, направления перемещения, скорости и/или ускорения кабины, исходя из электрических показателей, т.е. рекуперированной мощности от двигателя 10, если он работает в режиме генератора, и/или мощности, подводимой к двигателю 10 в активном режиме двигателя. Следует отметить, что указанными электрическими показателями являются напряжение, электрический ток, частота и т.д. Блок 26 может содержать память для хранения электрических показателей, так что в случае остановки кабины при аварийной ситуации важные характеристики лифта 2 могут быть считаны из указанной памяти. В другом варианте, обеспечивается возможность определять соответствующие характеристики при работе лифта 2 в аварийном режиме. Кроме того, обеспечивается возможность считывать такие электрические показатели дополнительно к уже хранящейся информации, полученной при предыдущей работе.
Блок 26 подает переменное питание к двигателю 10 для управления его скоростью. Обычно питание подается в форме переменных по ширине электрических импульсов. С этой целью блок 26 содержит управляющий блок, например процессор, который управляет одним или несколькими электрическими переключателями. Обычно указанные электрические переключатели включают такие полупроводниковые устройства, как МОП-транзисторы или БТИЗы. Такие устройства имеют потери на переключении, которые приблизительно пропорциональны количеству переключений в единицу времени. С другой стороны, переключение может создавать шум, который раздражает пользователей лифта в здании. Соответственно, обычно блок 26 имеет заданное переключающее напряжение, которое установлено с обеспечением компромиссного соотношения между потерями в мощности и создаваемым шумом. При использовании традиционных приводных блоков частота переключения устанавливается один раз и не изменяется в дальнейшем.
Вариант реализации, показанный на фиг.2, в основном соответствует показанному на фиг.1 и иллюстрирует лифт 2, содержащий кабину 4 и противовес 6. Кабина 4 и противовес 6 подвешены на подъемном тросе 8. Трос 8 приводится в действие приводным двигателем 10 посредством тягового шкива 12. Дополнительно к варианту реализации, показанному на фиг.1, показан индикатор 64 дверной области (ИДО), соединенный с датчиком 68 дверной области по линии 70. В показанном на фиг.2 варианте реализации индикатор 64 соединен с отдельным регулятором 24 скорости по линии 66. Альтернативно или дополнительно может быть обеспечена сигнальная линия, которая проходит непосредственно от датчика 68 к регулятору 24. Датчик 68 подает сигнал на регулятор 24 при приближении кабины 4 к площадке 72. Соответственно, регулятор 24 может прервать подачу питания к тормозу 18 в случае превышения скорости кабины 4 или достижения кабиной 4 площадки. Подобный индикатор дверной области и регулятор скорости могут быть обеспечены в варианте реализации, показанном на фиг.1.
Блок 26 соединен с основным источником 28 питания лифта 2 по линии 30 и принимает управляющие сигналы по линии 32. Управляющее устройство 34 лифта соединено с традиционными кнопками вызова в холле и в кабине лифта (не показаны) и принимает от них запросы о перемещении. Информация о фактическом рабочем состоянии подается на устройство 34, которое на основании этой информации определяет оптимальную последовательность перемещения и т.д. и подает соответствующие управляющие сигналы к блоку 26 для управления кабиной 4.
Блок 26 содержит выпрямитель 94 и инвертор 96. Выпрямитель 94 и инвертор 96 соединены посредством промежуточного контура 98 постоянного тока. Выпрямитель 94 выпрямляет переменный ток, поступающий по линии 30, и подает результирующее напряжение в промежуточный контур 98 постоянного тока.
В предпочтительном варианте реализации выпрямитель включает управляемый выпрямитель или конвертер 94, который, в отличие от пассивного выпрямителя, позволяет рекуперировать электроэнергию в электрическую сеть 28. Инвертор 96 может быть VVVF инвертором (VVVF -переменное напряжение, переменная частота), который изменяет выходное напряжение и выходную частоту для управления двигателем 12 в соответствии с управляющими сигналами, полученными от управляющего устройства 34. Как выпрямитель 94, так и инвертор 96 содержат переключатели, которые, как уже упоминалось, управляются соответствующим управляющим устройством наподобие микропроцессора. Каждое из устройств может иметь свое собственное управляющее устройство, однако также может быть обеспечено одно общее управляющее устройство. Выпрямитель 94 и инвертор 96 также могут иметь разную частоту переключения.
Лифт 2 содержит главный выключатель 86, который расположен в основной линии 30 питания. Он служит для отсоединения главного источника питания 28 от лифта 2 перед запуском аварийного режима работы для обеспечения определенных условий работы, даже если во время аварийного режима основной источник питания будет вновь подключен. Переключатель 86 может быть соединен с соответствующими средствами запуска работы в аварийном режиме механически или электрически.
В показанных на фиг.1 и 2 вариантах реализации обеспечены средства для запуска работы в аварийном режиме. Показанный на фиг.1 вариант реализации содержит сервисную панель 41, которая активируется посредством так называемой кнопки 45 оттормаживания. Аналогично, показанный на фиг.2 вариант реализации содержит тормозной переключатель 44, который в замкнутом положении подает аварийное питание по линии 60 к тормозу 18 и поднимает его. Как только регулятор 24 определяет приближение кабины 4 к требуемой площадке 72 или превышение скорости, он прерывает аварийную подачу питания к тормозу 18 посредством управляющего переключателя 62 для управления скоростью, который в частности является полупроводниковым устройством, так что тормоз опускается и останавливает кабину. Вместо указанных средств ручного управления может быть установлена автоматическая система. Для выполнения этой задачи может быть приспособлен блок 26.
Как правило, в случае аварии, например при перебое в питании, отказе элемента системы и т.д., лифт отключается, прекращается подача питания от основного источника питания к лифту 2. В таком состоянии управляющее устройство для управления приводом в аварийном режиме, такое как блок 26, может выявить аварийное состояние. С этой целью блок 26 (и, соответственно, управляющее устройство для управления в аварийном режиме) может получать электроэнергию от источника 42 питания или может содержать собственное накопительное устройство наподобие конденсатора и т.д. Впоследствии он может опрашивать необходимые компоненты в отношении их способности к выполнению аварийной работы и начинать аварийную работу после успешного выполнения указанного опроса. С этого момента автоматическое управление в аварийном режиме может быть до некоторой степени идентично работе в аварийном режиме, запущенной вручную.
Лифт 2, содержащий кабину 4 и противовес 6, может иметь различные характеристики фактических условий аварийной работы в зависимости от загрузки кабины 4, остановленной в аварийной ситуации, (i) кабина 4 и противовес 6 могут быть в уравновешенном состоянии, т е. необходимо быстро переместить кабину 4 и противовес 6 к требуемой площадке 72, (ii) кабина 4 и противовес 6 могут быть в незначительно неуравновешенном состоянии, в котором требуется быстро инициировать перемещение кабины и противовеса, (iii) кабина 4 и противовес 6 находятся по существу в неуравновешенном состоянии, так что при отсутствии должного управления кабина будет постоянно ускоряться после подъема тормоза.
Очевидно, что при условиях (i) и (ii) к двигателю 10 необходимо подать питание от источника 42, тогда как при условии (iii) двигатель 10 работает в качестве генератора и подает мощность обратно в блок 26. Настоящее изобретение обеспечивает эффективную подачу питания к двигателю 10 и/или управление рекуперированной мощностью от двигателя 10 путем настройки частоты переключения приводного блока, т.е выпрямителя 94 и/или инвертора 96, в зависимости от характеристики фактических условий аварийной работы, что позволяет осуществить оптимизированную работу. С этой целью блок 26 определяет характеристику фактических условий аварийной работы, например какого-либо из вышеуказанных условий (i), (ii) и (iii). Кроме того, вместо определения различий между тремя указанными условиями система может определять уравновешенное или неуравновешенное состояние или определять множество других условий, отличающихся от трех указанных.
Указанное определение может основываться на информации о лифте, например информации о мощности, запасенной во время предыдущей операции, или фактической информации, которая может быть получена, например, путем подъема тормоза, который удерживает кабину и противовес на месте посредством приводного двигателя и блока 26. Кроме того, информацию о фактическом состоянии лифта можно одновременно получить от обоих источников лифта 2.
На основании данной информации блок 26 может определить оптимальное значение частоты его переключения. На фиг 3 показана простая, но эффективная схема установки частоты переключения в зависимости от сбалансированности кабины 4 и противовеса 6. На фиг.3 по горизонтальной оси показано условно уравновешенное/неуравновешенное состояние в процентах, на которой 0% указывает на уравновешенное состояние,+100% указывает на полностью неуравновешенное состояние, при котором кабина 4 в шахте подтянута вверх под весом противовеса 6, -100% указывает на полностью неуравновешенное состояние, в котором кабина 4 в шахте подтягивает противовес 6 вверх. По вертикальной оси показана частота переключения, нормальное значение которой принять равным 5 кГц.
В аварийной ситуации в уравновешенном или незначительно неуравновешенном состоянии, т.е. при вышеуказанных условиях (i) и (ii), частота переключения блока 26 значительно уменьшается: в настоящем варианте реализации - до 500 Гц. Это приводит к тому, что значительно уменьшаются потери при переключении, так что активная работа двигателя 10, питаемого от источника 42, может быть более эффективной. Благодаря пониженной частоте переключения, уровень шума, образуемого в условиях аварийной работы, является допустимым. При незначительно более неуравновешенном состоянии, т.е. приблизительно до 50%, частота переключения устанавливается в пределах традиционной частоты, которая обычно не изменяется. Двигатель 10 будет активно работать в данном рабочем диапазоне, вырабатывая энергии не более, чем может быть потреблено лифтом 2, в частности тормозом и/или электрическим/электронным оборудованием. Только при переходе в определенное неуравновешенное состояние, т.е. за 50%, как показано на фиг.3, приводной двигатель вырабатывает электроэнергию, которую необходимо рассеивать другими устройствами, отличными от традиционных потребителей лифта 2. С этой целью частота переключения значительно увеличивается в настоящем варианте реализации - до 20 кГц. Вследствие этого увеличиваются потери при переключении, так что блок 26 будет работать как потребитель электроэнергии и будет рассеивать рекуперированную мощность.
Как уже упоминалось, значения частоты переключения, соответствующие неуравновешенному состоянию и, в частности, показанные на фиг.3, являются обычными и на данном этапе рассматриваются изобретателями как фактические. Верхний предел частоты переключения установлен с обеспечением компромиссного соотношения между уменьшением срока службы переключающих устройств блока 26 по причине увеличения тепловой нагрузки при спасательных операциях с одной стороны и подлежащей рассеянию мощности с другой. Как правило, верхний предел частоты переключения в 2-5 раз превышает нормальную частоту. Обычно при аварийной работе увеличение частоты переключения приводит к увеличению скорости кабины, которое происходит из-за, того, что при аварийной работе лифт 2 находится только в режиме максимального энергопотребления, а блок 10 в генераторном аварийном режиме может работать только при скорости, которая соответствует выходной мощности, соответствующей максимальному энергопотреблению. Таким образом, увеличение частоты переключения приводит к увеличению скорости работы в аварийном режиме и уменьшению времени спасения заблокированных пассажиров. С другой стороны, это свойство позволяет исключить или уменьшить емкости резисторов динамического торможения, которые необходимы в традиционных нерекуперативных лифтах 2 для рассеяния рекуперированной двигателем 10 мощности. Следует отметить, что настоящее изобретение не ограничивается рекуперативными лифтами, хотя они относятся к предпочтительному варианту реализации. Кроме того, преимущества настоящего изобретения, т.е. уменьшение частоты переключения ниже нормальной для более эффективной работы двигателя 10 и т д., можно использовать в нерекуперативных лифтах.
При необходимости рассеяния рекуперированной мощности для блока 26 (и управления в аварийном режиме, соответственно) предпочтительно включать все имеющиеся потребители лифта 2.
На фиг.3 проиллюстрирована ступенчатая установка частоты переключения, при этом следует заметить, что предпочтительным считается постепенное изменение частоты переключения. Например, для дополнительного уменьшения времени спасения заблокированных пассажиров, можно сначала значительно уменьшить частоту переключения даже при по существу неуравновешенном состоянии, поддерживая ускорения кабины 4 до достижения определенной скорости, которая немного ниже аварийной, и постепенно или ступенчато увеличить частоту переключения для установления требуемой скорости спасательной операции.
Настоящее изобретение, как видно по меньшей мере из предпочтительных вариантов его реализации, позволяет минимизировать размеры аккумуляторной батареи, исключить дополнительные электрические схемы, например резисторы динамического торможения, и максимизировать скорость спасательной операции. Это позволяет снизить стоимость компонентов и эксплуатационные расходы на обслуживание аккумуляторных батарей, которые необходимо регулярно менять во время технического обслуживания.
Проиллюстрированные варианты реализации изобретения, как описано выше, позволяют подбирать, в частности изменять, частоту переключения приводного блока во время аварийной работы. Следовательно, можно значительно уменьшить частоту переключения, так как при аварийной работе приводной двигатель активно перемещает кабину лифта. Это значительно снижает потери приводного блока, так как потери пропорциональны количеству переключений полупроводниковых устройств. Таким образом, энергопотребление может быть значительно снижено и, как следствие, уменьшена емкость аккумуляторной батареи. Несмотря на повышение, уровень шума, производимый приводным блоком при аварийной работе, остается допустимым.
Кроме того, можно значительно увеличить частоту переключения приводного блока с целью увеличения потерь. Это является особенно преимущественным в случае рекуперативных лифтов, которые в определенных рабочих условиях рекуперируют электроэнергию и возвращают указанную энергию к главному источнику питания при нормальной работе. При аварийной работе рекуперация электроэнергии обратно в сеть, главным образом, невозможна. В этом случае возникает задача по рассеянию рекуперированной от электродвигателя мощности. Поскольку в таком состоянии аккумуляторная батарея аварийного источника питания полностью заряжена, невозможно вернуть рекуперированную мощность в эту батарею. С другой стороны, включение всех потребителей лифта, например освещения и т.д., обычно бывает недостаточно для потребления всей рекуперированной мощности. Известным способом рассеяния этой мощности является использование дополнительных схем, например резисторов динамического торможения. Однако их использование существенно увеличивает производственные расходы. Следовательно, проиллюстрированные варианты реализации настоящего изобретения позволяют уменьшить расходы благодаря использованию рекуперативных лифтов без использования каких-либо дополнительных схем для рассеяния мощности при аварийной работе.
Однако предпочтительно включать все имеющиеся потребители во время аварийной работы, при которой требуется рассеяние рекуперированной мощности, т.е., как указано выше, в соответствии с характеристиками условий аварийной эксплуатации. Кроме того, следует отметить, что путем увеличения рассеяния рекуперированной мощности во время аварийной работы, можно увеличить скорость перемещения кабины лифта при проведении спасательных работ и, таким образом, уменьшить время извлечения заблокированных пассажиров из кабины лифта.
Кроме ситуаций, в которых требуется уменьшение или увеличение частоты переключения, существуют ситуации, в которых изменение частоты переключения не требуется, например если достаточно только силы тяжести, действующей на кабину лифта и/или противовес, для перемещения кабины лифта при заданной традиционной частоте переключения и если не требуется рассеивать дополнительную мощность.
При аварийной работе постоянное изменение частоты переключения может быть предпочтительным для подачи оптимального питания на приводной двигатель или оптимального рассеяния электрической энергии. Таким образом, кабине лифта можно придать ускорение в начале аварийного рейса с характеристикой аварийной эксплуатации, при которой кабина лифта медленно ускоряется под действием силы тяжести, и уменьшить частоту переключения для экономной работы приводного двигателя. Некоторое время спустя или по достижении требуемой скорости частота переключения приводного двигателя может быть резко или постепенно изменена, так что в конце концов кабина лифта перемещается с заданной аварийной скоростью.
Несмотря на то, что изобретение описано со ссылками на проиллюстрированные варианты реализации, для специалиста очевидно, что без выхода за рамки настоящего изобретения могут быть внесены различные изменения, а элементы могут быть заменены эквивалентными. Кроме того, без выхода за рамки настоящего изобретения могут быть выполнены различные преобразования с целью приспособить конкретную ситуацию или материал для реализации идеи настоящего изобретения. Таким образом, настоящее изобретение не ограничено отдельными раскрытыми вариантами реализации и включает все варианты реализации, охватываемые измененной формулой изобретения.
Изобретение относится к области подъемников и предназначено для эксплуатации лифта в аварийном режиме. Лифт (2) содержит кабину (4), приводной двигатель (10), приводной блок (26). При эксплуатации лифта (2) в аварийном режиме подают питание от аварийного источника питания (48), переводят блок (26) в аварийный режим, определяют характеристику фактических условий аварийной эксплуатации и устанавливают частоту переключения приводного блока (26) в зависимости от указанной характеристики фактических условий эксплуатации и увеличивают в аварийном режиме частоту переключения относительно нормальной частоты при перемещении кабины (4) под действием силы тяжести. Достигается уменьшение размера аварийного источника питания. 2 н. и 23 з.п. ф-лы, 3 ил.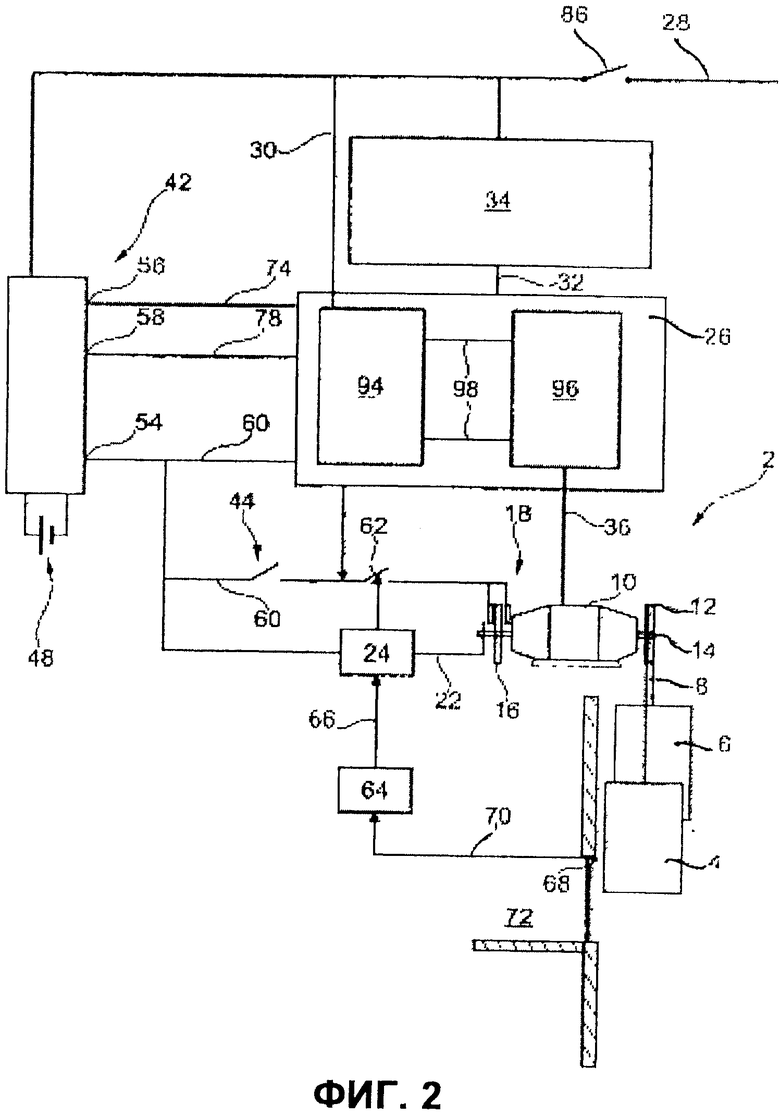
1. Способ эксплуатации в аварийном режиме лифта, содержащего кабину, приводной двигатель, приводной блок, подающий питание на приводной двигатель и управляющий им, и аварийный источник питания, причем приводной блок имеет заданную нормальную рабочую частоту переключения, а согласно способу:
a) подают питание от аварийного источника питания,
b) переводят приводной блок в аварийный режим,
c) определяют характеристику фактических условий аварийной эксплуатации,
d) устанавливают частоту переключения приводного блока в зависимости от указанной характеристики фактических условий аварийной эксплуатации и
e) увеличивают в аварийном режиме частоту переключения относительно нормальной рабочей частоты переключения при перемещении кабины под действием силы тяжести.
2. Способ по п.1, согласно которому приводной блок содержит выпрямитель и инвертор, выпрямитель соединен с источником переменного тока для подачи постоянного тока к инвертору при нормальной работе, инвертор соединен с приводным двигателем, приводной двигатель и приводной блок выполнены с возможностью работы в нормальном режиме с обеспечением рекуперации мощности, когда приводной двигатель приводится в действие силой тяжести, действующей на кабину, и обеспечением подачи указанной мощности обратно к источнику переменного тока.
3. Способ по п.1, согласно которому приводной блок содержит выпрямитель и инвертор, который имеет заданную нормальную рабочую частоту переключения, и согласно которому устанавливают частоту переключения инвертора.
4. Способ по п.1, согласно которому приводной блок содержит выпрямитель и инвертор, причем выпрямитель имеет заданную нормальную рабочую частоту переключения, а согласно способу дополнительно устанавливают частоту переключения выпрямителя.
5. Способ по п.1, содержащий шаг остановки кабины в ответ на аварийную ситуацию перед выполнением шага а).
6. Способ по п.1, согласно которому определяют параметр фактического состояния лифта и в зависимости от указанного параметра изменяют частоту переключения.
7. Способ по п.6, согласно которому параметром является загрузка кабины и противовеса.
8. Способ по п.6, согласно которому параметром является скорость кабины.
9. Способ по п.6, согласно которому параметром является электрический ток, проходящий через инвертор.
10. Способ по п.6, согласно которому на основе указанного параметра определяют необходимость подачи питания на приводной двигатель для перемещения кабины и уменьшают частоту переключения относительно нормальной рабочей частоты переключения, если для перемещения кабины на приводной двигатель необходимо подать питание.
11. Способ по п.6, согласно которому на основе указанного параметра определяют возможность перемещения кабины под действием силы тяжести и увеличивают частоту переключения относительно нормальной рабочей частоты переключения в случае перемещения кабины под действием силы тяжести.
12. Способ по п.11, согласно которому частоту переключения увеличивают, только когда скорость кабины превышает предельное значение.
13. Способ по п.11 или 12, согласно которому частоту переключения увеличивают только до степени, необходимой для рассеяния избыточной мощности, производимой приводным двигателем.
14. Лифт, содержащий кабину, приводной двигатель, приводной блок, который соединен с приводным двигателем и который выполнен с возможностью подачи питания на приводной двигатель и управления им, и аварийный источник питания, причем приводной блок имеет заданную нормальную рабочую частоту переключения, а лифт выполнен с возможностью в аварийной ситуации:
a) получать питание от аварийного источника питания,
b) переводить приводной блок в аварийный режим,
c) определять характеристику фактических условий аварийной эксплуатации,
d) устанавливать частоту переключения приводного блока в зависимости от указанной характеристики фактических условий аварийной эксплуатации и
e) увеличивать в аварийном режиме частоту переключения относительно нормальной рабочей частоты переключения при перемещении кабины под действием силы тяжести.
15. Лифт по п.14, в котором приводной блок содержит выпрямитель и инвертор, выпрямитель соединен с источником переменного тока для подачи постоянного тока к инвертору при нормальной работе, инвертор соединен с приводным двигателем, приводной двигатель и приводной блок выполнены с возможностью рекуперировать мощность, когда приводной двигатель приводится в действие силой тяжести, действующей на кабину, и подавать указанную мощность обратно к источнику переменного тока.
16. Лифт по п.14, который выполнен с возможностью осуществлять аварийную остановку в аварийном режиме перед подачей питания от аварийного источника питания.
17. Лифт по п.14, который выполнен с возможностью определять в аварийном режиме параметр фактического состояния лифта и возможностью устанавливать частоту переключения в зависимости от указанного параметра.
18. Лифт по п.17, в котором указанным параметром является загрузка кабины и противовеса.
19. Лифт по п.17, в котором указанным параметром является скорость кабины.
20. Лифт по п.17, в котором указанным параметром является электрический ток, вырабатываемый приводным двигателем.
21. Лифт по п.17, в котором инвертор имеет заданную нормальную рабочую частоту переключения и который выполнен с возможностью устанавливать в аварийном режиме частоту переключения инвертора.
22. Лифт по п.14, в котором выпрямитель имеет заданную нормальную рабочую частоту переключения и который выполнен с возможностью устанавливать в аварийном режиме частоту переключения выпрямителя.
23. Лифт по п.14, который выполнен с возможностью определять в аварийном режиме на основе указанного параметра необходимость перемещения кабины под действием силы тяжести или необходимость подачи питания на приводной двигатель для перемещения кабины и соответственно увеличивать частоту переключения относительно нормальной рабочей частоты переключения при перемещении кабины под действием силы тяжести и уменьшать частоту переключения относительно нормальной рабочей частоты переключения при необходимости подачи питания на приводной двигатель для перемещения кабины.
24. Лифт по п.23, который выполнен с возможностью увеличивать частоту переключения, только когда скорость кабины превышает предельное значение.
25. Лифт по п.23 или 24, который выполнен с возможностью увеличивать частоту переключения только до степени, необходимой для рассеяния избыточной мощности, производимой приводным двигателем.
| US 4548299 А, 22.10.1985 | |||
| JP 4016470 А, 21.01.1992 | |||
| US 4742892 А, 10.05.1988 | |||
| JP 2005162376 А, 23.06.2005 | |||
| US 6732838 В1, 11.05.2004 | |||
| СПОСОБ ТОРМОЖЕНИЯ КОРОТКОЗАМКНУТОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2089037C1 |

