ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка в целом относится к области управления лифтами, а более конкретно, к способу и системе эвакуации лифта, и контроллеру.
УРОВЕНЬ ТЕХНИКИ
При развитии технологии управления лифтами повышаются требования в отношении безопасности и устойчивости к отказам у клиентов системы лифта. В целом, когда система лифта установлена в здании, необходимо, чтобы система лифта обладала функцией аварийной эвакуации, которая могла бы быстро инициировать открытие двери после перехода в выравненное положение в случае отказа электрической сети, для безопасной эвакуации пассажиров. Существует несколько схем для реализации аварийной эвакуации лифта при отказе электрической сети.
1. Для аварийной эвакуации лифта может быть предусмотрена система бесперебойного питания/источник бесперебойного питания (UPS) или автоматическое устройство эвакуации (ARD). При отказе электрической сети, некоторая емкость энергии, хранящейся в батарее, преобразуется в электрическую энергию для подачи электрического питания на частотный преобразователь в форме однофазного переменного тока (AC) (в основном имитируя 220 В питание от электросети, и некоторые из них имеют волны прямоугольной формы), заменяя нормальный трехфазный источник питания переменного тока 380 В. В условиях подачи питания с низким напряжением, контроллер управляет двигателем для медленного перемещения в выравненное положение. Однако затраты на UPS и ARD являются высокими, а запас энергии в батарее ограничен. После нескольких операций эвакуации энергия батареи будет почти полностью израсходована.
2. Кабина лифта может проскользить в выравненное положение с помощью контактора со схемой «звезда-треугольник». Трехфазная обмотка двигателя имеет короткое замыкание за счет контактора со схемой «звезда-треугольник». Частотный преобразователь не функционирует. Ток короткого замыкания двигателя может генерировать сопротивление крутящему моменту, которое уравновешивается с крутящим моментом нагрузки, так что кабина лифта может перейти в соседнее выравненное положение с малой скоростью. После приема сигнала выравненной зоны или сигнала области двери, шкивный тормоз быстро замыкается для остановки кабины лифта в выравненном положении. Данный способ может предотвратить затраты на подачу питания от UPS и ARD, однако скорость скольжения кабины лифта, обеспечиваемая контактором со схемой «звезда-треугольник», является низкой, поэтому возврат в выравненное положение занимает много времени. Кроме того, шкивный тормоз работает, когда скорость движения лифта не равняется нулю, что оказывает негативное воздействие на пассажиров.
3. Скольжение кабины лифта может выполняться посредством электрического устройства. Данный способ имеет тот же принцип, что и у контактора со схемой «звезда-треугольник». Однако трехфазная обмотка двигателя имеет короткое замыкание ввиду выключателей частотного преобразователя, а не механического контактора со схемой «звезда-треугольник». Следовательно, здесь имеют место те же проблемы, что были описаны выше.
4. В этой схеме определяется регенерация энергии двигателя. В патентном документе CN107128756A была представлена схема, в которой при недоступности трехфазной входной мощности во время перемещения лифта, стратегия управления в двигателе меняется для генерирования возобновляемой энергии с целью поддержания напряжения постоянного тока (DC) в шине и возврата кабины лифта в выравненное положение плавным и контролируемым образом. Однако данная схема реализуется перед тем, как напряжение постоянного тока в шине упало до низкого уровня, и она не предусматривает то, каким образом можно вернуть кабину лифта в выравненное положение плавным образом, когда лифт уже прекратил перемещение, а напряжение постоянного тока в шине уже упало до нуля.
5. Кабина лифта может скользить путем блокировки волны ШИМ частотного преобразователя. Когда контроллер лифта обнаруживает, что имеет место отказ лифта и он остановился при отсутствии подачи электропитания, волна ШИМ частотного преобразователя блокируется, а шкивной тормоз отпускается для того, чтобы двигатель мог скользить. В это время, частотный преобразователь работает в неконтролируемом состоянии выпрямления, а регенерируемая энергия двигателя заряжает шину постоянного тока через диод обратной цепи IGBT. Когда напряжение постоянного тока в шине возрастает до заранее определенного порогового значения или скольжение двигателя достигает заранее определенного значения скорости, контроллер лифта начинает переключение на управление скоростью двигателя с замкнутым контуром, а затем управляет кабиной лифта для плавного возврата в выравненное положение. Проблема данной схемы заключается в том, что при ее начале скорость скольжения является слишком высокой, что оказывает негативное воздействие на пассажиров.
В заключение, в решениях уровня техники имеют место определенные проблемы, такие как высокие затраты, низкая степень удобства или слишком низкое напряжение постоянного тока в шине для работы при отказе электрической сети.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящей заявки заключается в представлении способа и системы для эвакуации лифта, и контроллера, которые направлены на указанные выше проблемы решений уровня техники, такие как высокие затраты, низкая степень удобства или слишком низкое напряжение постоянного тока в шине для работы при отказе электрической сети.
В одном аспекте представлен способ эвакуации лифта, который включает:
переключение источника питания с первичного источника питания на резервный источник питания, переключение двигателя в состояние короткого замыкания и обеспечение перехода кабины лифта в состояние скольжения кабины при обнаружении того, что первичный источник питания недоступен,
снятие состояния короткого замыкания двигателя и осуществление на двигателе управления с разомкнутым контуром после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени таким образом, чтобы модуль инвертора выдавал напряжение на двигатель в соответствии с заранее определенной стратегией; причем двигатель использует энергию, генерируемую операцией скольжения кабины для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, примененного модулем инвертора;
осуществление на двигателе управления с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью;
снижение скорости вращения двигателя до нуля и остановку двигателя на основе управления с замкнутым контуром, и последующую остановку скольжения кабины таким образом, чтобы кабина лифта остановилась в выравненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выравненного положения.
Во втором аспекте представлен контроллер, который содержит:
блок управления скольжением кабины, выполненный с возможностью переключения источника питания с первичного источника питания на резервный источник питания, переключения двигателя в состояние короткого замыкания и обеспечения перехода кабины лифта в состояние скольжения кабины при обнаружении того, что первичный источник питания недоступен,
блок управления с разомкнутым контуром, который выполнен с возможностью снятия состояния короткого замыкания двигателя и осуществления на двигателе управления с разомкнутым контуром после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией; причем двигатель использует энергию, генерируемую скольжением кабины для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, примененного модулем инвертора;
блок управления с замкнутым контуром, который выполнен с возможностью осуществления на двигателе управления с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью;
блок управления тормозом, который выполнен с возможностью снижения скорости вращения двигателя до нуля и остановки двигателя на основе управления с замкнутым контуром, и последующей остановки операции скольжения кабины таким образом, чтобы кабина лифта остановилась в выравненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выравненного положения.
В третьем аспекте представлен контроллер, который содержит память и процессор, причем память выполнена с возможностью хранения компьютерной программы, которая может быть исполнена процессором, причем при исполнении компьютерной программы процессором происходит реализация этапов описанного выше способа эвакуации лифта.
В четвертом аспекте представлена система для эвакуации лифта, которая содержит модуль выпрямителя, шину постоянного тока высокой мощности, модуль инвертора, понижающий преобразователь, переключатель, резервный источник питания, преобразователь постоянного тока в постоянный ток и контроллер, описанный выше; причем модуль выпрямителя, шина постоянного тока высокой мощности и модуль инвертора соединены последовательно;
понижающий преобразователь соединен с шиной постоянного тока высокой мощности для понижения напряжения шины постоянного тока высокой мощности и выдачи напряжения с пониженной мощностью;
резервный источник питания соединен с понижающим преобразователем для захвата электропитания из понижающего преобразователя для заряда при нормальной подаче питания;
переключатель соединен с понижающим преобразователем, резервным источником питания, контроллером и преобразователем постоянного тока в постоянный ток, соответственно, для выбора по меньшей мере одного источника выдачи постоянного тока из понижающего преобразователя и резервного источника питания под управлением контроллера;
преобразователь постоянного тока в постоянный ток содержит входной порт и множество выходных портов, причем входной порт соединен с переключателем, а множество выходных портов, соответственно, соединен с модулем инвертора, контроллером и другими устройствами, связанными с перемещением лифта, для реализации преобразования напряжения источника выдачи постоянного тока, выбранного переключателем, и выдачи рабочего напряжения на модуль инвертора, контроллер и другие устройства, связанные с перемещением лифта.
Благодаря реализации способа и системы для эвакуации лифта, и контроллера, в соответствии с настоящей заявкой, можно достичь нескольких преимуществ. В настоящем изобретении двигатель переключается в состояние короткого замыкания перед активацией проскальзывания кабины лифта, так что проскальзывание кабины может начаться с малой скоростью для обеспечения того, чтобы кабина лифта не ускорялась быстро, тем самым улучшая устойчивость и безопасность начала во время операции по эвакуации. После этого реализуется управление с разомкнутым контуром, а после него следует управление с замкнутым контуром. Отрицательное напряжение подводится в двигатель через управление с разомкнутым контуром, так что двигатель может заряжать шину постоянного тока высокой мощности для улучшения плавного переключения на управление с замкнутым контуром. Управление с замкнутым контуром обеспечивает двигателю возможность более плавного запуска в процессе возврата в выравненное положение, а при стоянке, скорость двигателя может быть быстро снижена до нуля на основе управления с замкнутым контуром. Таким образом, чувство безвыходности, вызванное непосредственным замыканием шкивного тормоза, будет отсутствовать, а удобство и устойчивость процесса эвакуации могут быть повышены. Резюмируя вышесказанное, в настоящей заявке отсутствует необходимость в обеспечении UPS или ARD, и затраты на аппаратное обеспечение являются низкими, при этом лифт может реализовывать устойчивое управление началом, возвратом в выравненное положение и стоянку, когда первичный источник питания недоступен, а напряжение шины постоянного тока падает до очень низкого значения или даже до нуля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более ясного описания варианта реализации настоящего изобретения или технического решения из уровня техники, в представленном далее описании будут вкратце описаны чертежи, используемые в варианте реализации или уровне техники. Очевидно, что на описанных ниже чертежах представлены лишь варианты реализации настоящего изобретения. Специалист в данной области техники, не прилагая каких-либо творческих усилий, также сможет получить чертежи, отличные от представленных чертежей.
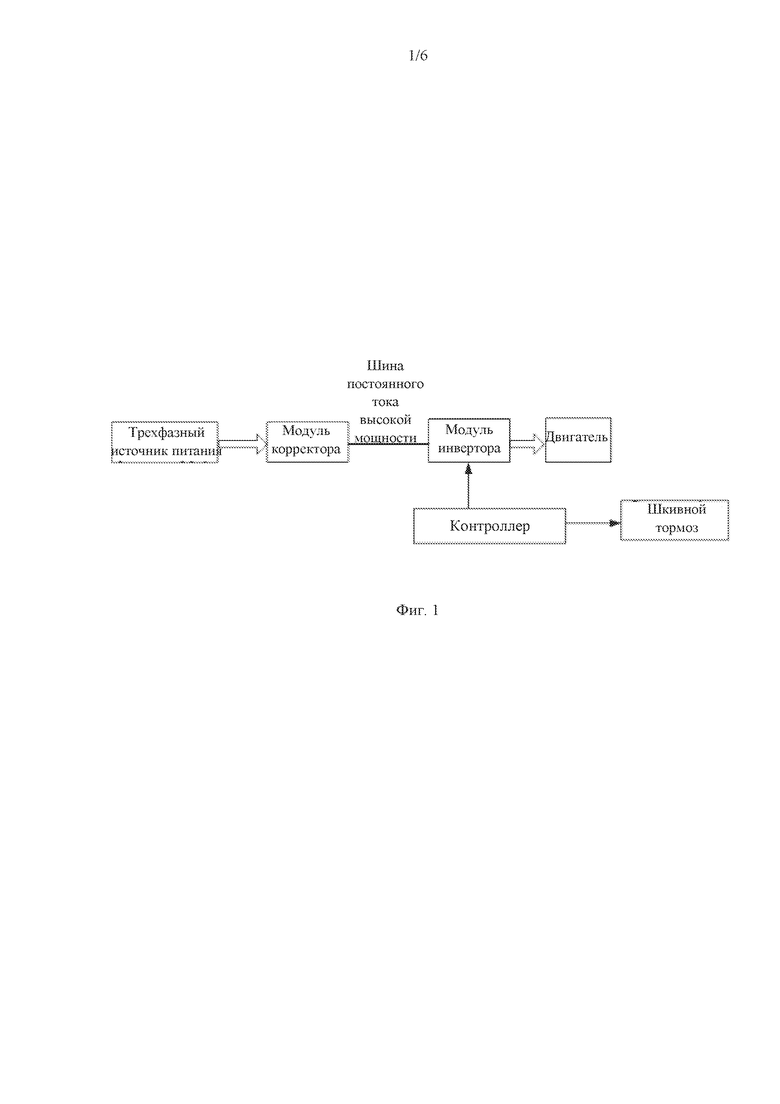
Фиг. 1 представляет собой схематическое изображение работы лифта.
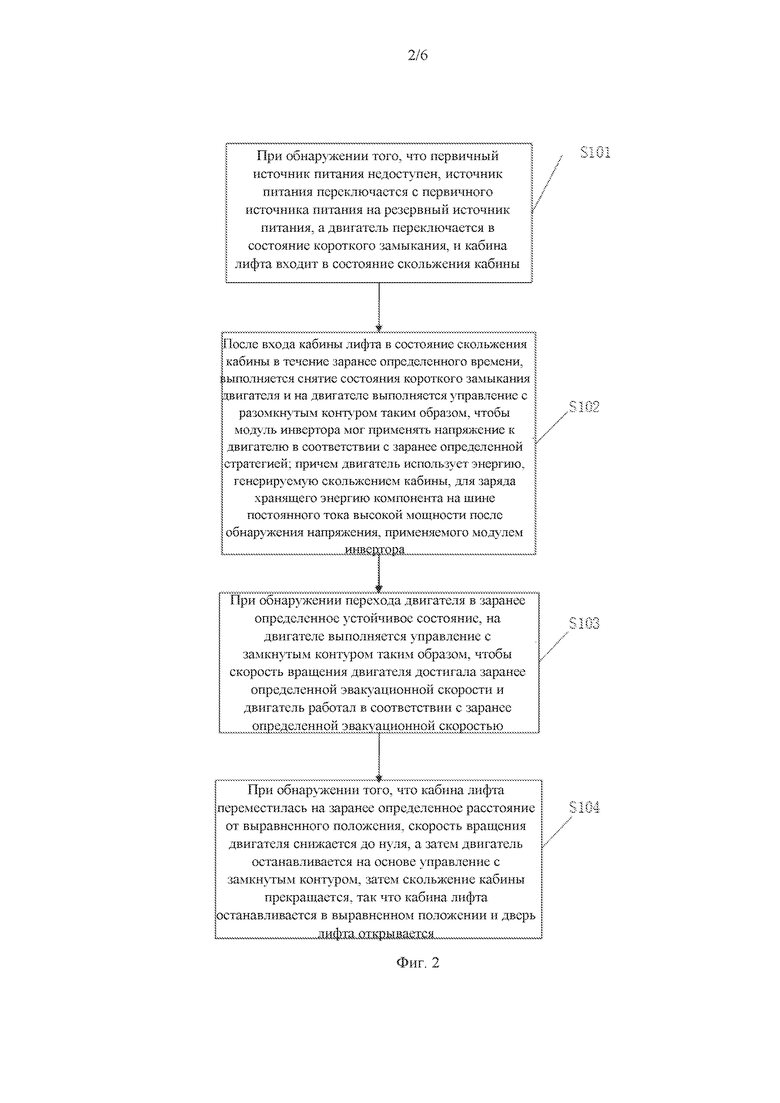
Фиг. 2 представляет собой схему способа эвакуации лифта, в соответствии с первым вариантом реализации настоящего изобретения.
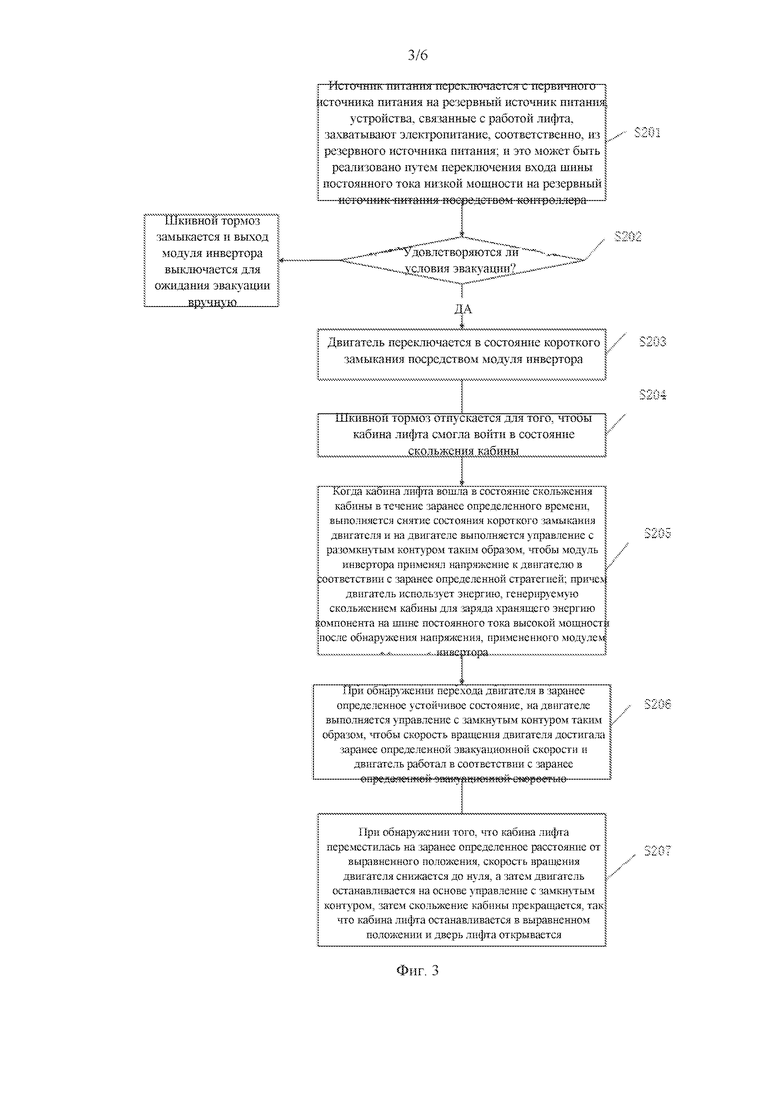
Фиг. 3 представляет собой схему способа эвакуации лифта, в соответствии со вторым вариантом реализации настоящего изобретения.
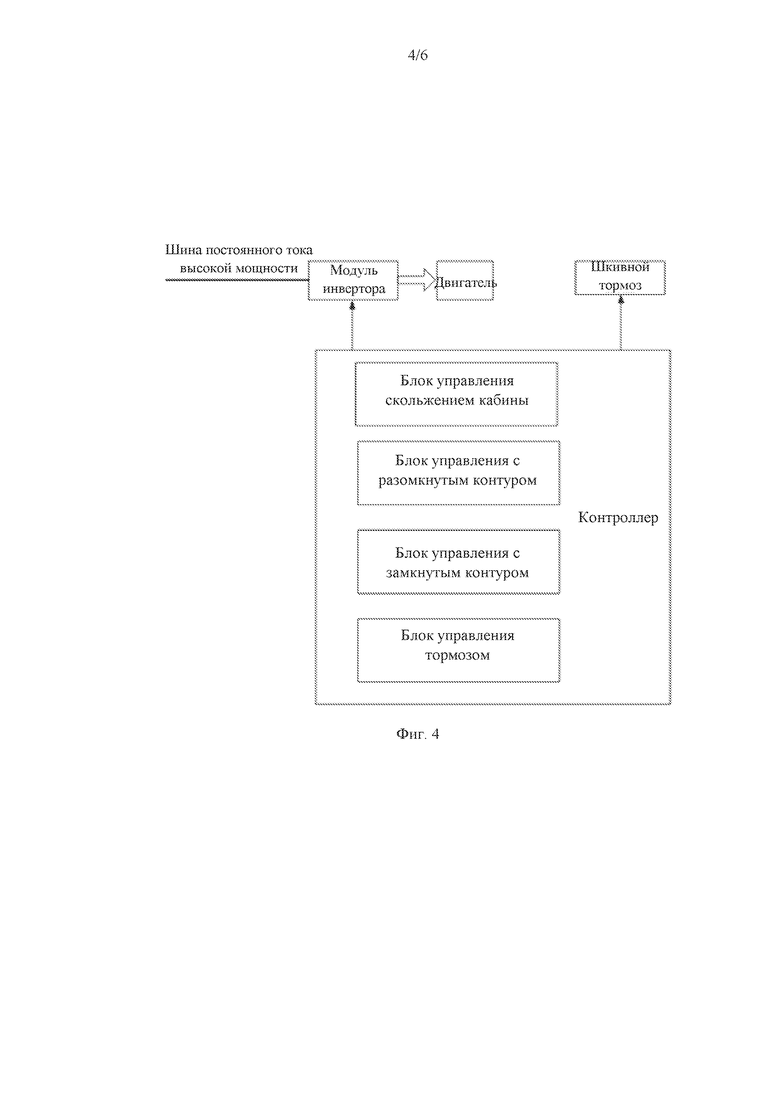
Фиг. 4 представляет собой конструктивную схему контроллера, в соответствии с третьим вариантом реализации настоящего изобретения.
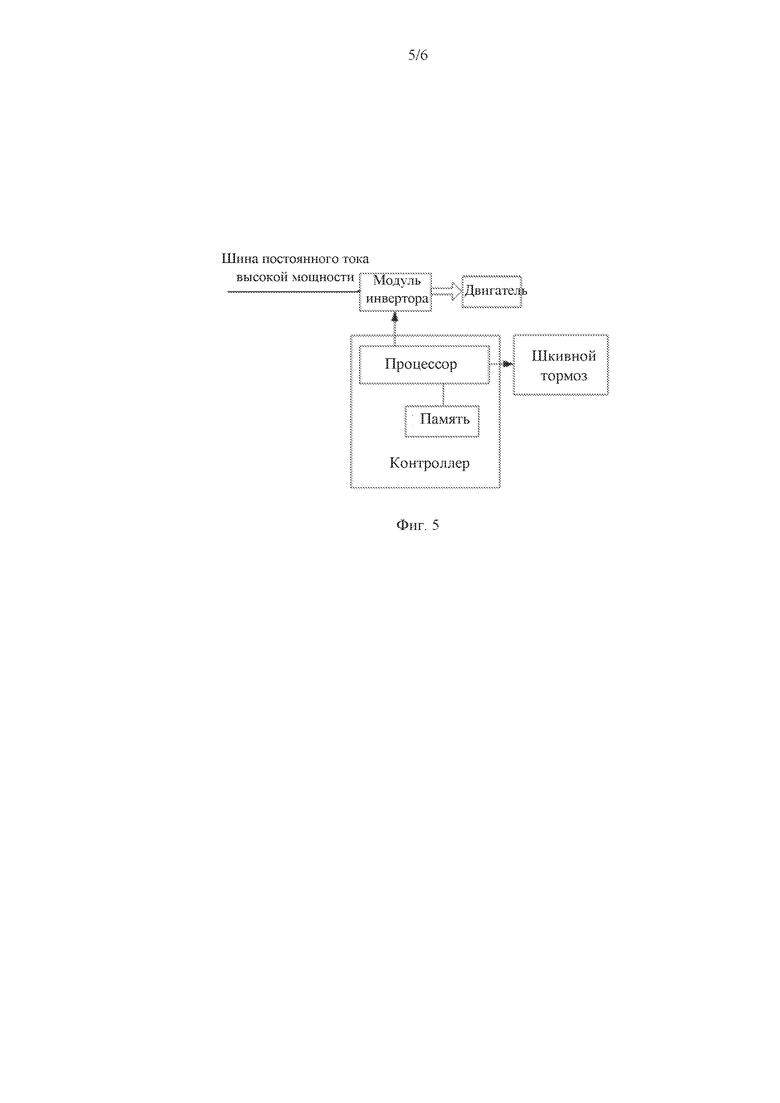
Фиг. 5 представляет собой конструктивную схему контроллера, в соответствии с четвертым вариантом реализации настоящего изобретения.
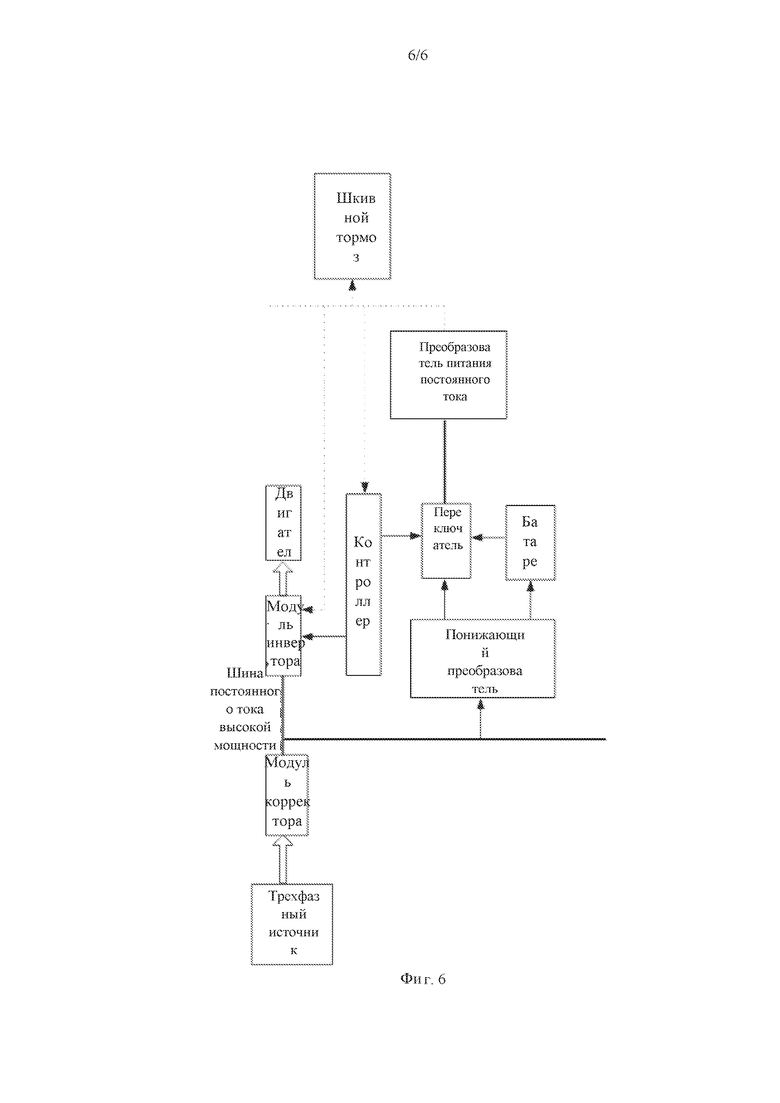
Фиг. 6 представляет собой схему системы для эвакуации лифта, в соответствии с пятым вариантом реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА РЕАЛИЗАЦИИ
Для упрощения понимания настоящего изобретения, далее будет представлено более исчерпывающее описание настоящего изобретения со ссылкой на соответствующие чертежи. Типичные варианты реализации настоящего изобретения показаны на прилагаемых чертежах. Однако настоящее изобретение может быть реализовано во множестве различных форм и не ограничивается вариантами реализации, описанными в настоящем документе. Напротив, эти варианты реализации представлены для того, чтобы сделать описание более подробным и исчерпывающим.
Если иное не определено, все технические и научные термины, используемые в настоящем документе, имеют те же самые значения, которые в целом известны специалисту в области техники, к которой относится настоящее изобретение. Термины, используемые в описании настоящего изобретения, представлены лишь с целью описания конкретных вариантов реализации и не предназначены для ограничения настоящего изобретения.
Фиг. 1 представляет собой схематическое изображение работы лифта, в соответствии с настоящей заявкой. Как показано, переменный ток, выдаваемый из трехфазного источника питания, преобразуется в постоянный ток после выпрямления модулем выпрямителя, а затем выдается на модуль инвертора через шину постоянного тока высокой мощности. Затем, модуль инвертора преобразует постоянный ток в переменный ток с регулируемым напряжением для управления скоростью двигателя и приведения в действие кабины лифта для перемещения вверх и вниз посредством двигателя. С одной стороны, контроллер управляет модулем инвертора для управления работой двигателя, а с другой стороны, он управляет другими элементами работы лифта, такими как шкивной тормоз и т.д.
Общий замысел настоящего изобретения заключается в следующем. Сначала, при обнаружении того, что первичный источник питания недоступен, источник питания переключается с первичного источника питания на резервный источник питания, а двигатель переключается в состояние короткого замыкания, и кабина лифта входит в состояние скольжения кабины. Затем, после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени, выполняется снятие состояния короткого замыкания двигателя и на двигателе выполняется управление с разомкнутым контуром таким образом, чтобы модуль инвертора мог применять напряжение к двигателю в соответствии с заранее определенной стратегией. Двигатель использует энергию, генерируемую скольжением кабины, для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, применяемого модулем инвертора. При обнаружении перехода двигателя в заранее определенное устойчивое состояние, на двигателе выполняется управление с замкнутым контуром таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью. Наконец, при обнаружении того, что кабина лифта переместилась на заранее определенное расстояние от выравненного положения, скорость вращения двигателя снижается до нуля, а затем двигатель останавливается на основе управление с замкнутым контуром, затем скольжение кабины прекращается, так что кабина лифта останавливается в выравненном положении и дверь лифта открывается.
Для обеспечения улучшенного понимания приведенных выше технических решений, они будут описаны подробно в сочетании с чертежами описания и конкретными способами реализации. Следует понимать, что конкретные признаки вариантов реализации и варианты реализации настоящего изобретения представляют собой подробное описание технических решений из настоящей заявки, а не ограничение технических решений из настоящей заявки. В случае отсутствия конфликта, варианты реализации и технические признаки в варианте реализации настоящего изобретения могут быть скомбинированы друг с другом.
Первый вариант реализации
Фиг. 2 представляет собой схему способа эвакуации лифта, в соответствии с первым вариантом реализации настоящего изобретения. Способ исполняется контроллером на Фиг. 1, при этом подробное описание процесса реализации способа является следующим.
На этапе S101, при обнаружении того, что первичный источник питания недоступен, источник питания переключается с первичного источника питания на резервный источник питания, а двигатель переключается в состояние короткого замыкания, и кабина лифта входит в состояние скольжения кабины.
Переключение двигателя в состояние короткого замыкания означает, что двигатель входит в состояние блокировки сигнала. Например, все переключатели верхнего плеча моста в модуле инвертора, соединенного с двигателем, выключаются, а все переключатели нижнего плеча моста в модуле инвертора включаются одновременно, так что состояние блокировки сигнала у двигателя реализуется электронно.
Этапы способа в данном варианте реализации могут быть реализованы контроллером на Фиг. 1 при взаимодействии с другими устройствами, связанными с перемещением двигателя (такими как модуль инвертора, шкивной тормоз и т.д.). Следовательно, когда первичный источник питания недоступен, также должен быть обеспечен источник питания для контроллера и других устройств, связанных с перемещением лифта. Таким образом, в данном варианте реализации, когда первичный источник питания доступен, источник резервного питания и устройства, связанные с перемещением лифта, захватывают электропитание из шины постоянного тока с высокой мощностью для заряда или работы после снижения напряжения. Когда первичный источник питания недоступен, источник питания переключается с первичного источника питания на резервный источник питания, так что устройства, связанные с перемещением лифта, захватывают электропитание, соответственно, из резервного источника питания для перемещения. Например, шина постоянного тока низкой мощности в целом предусмотрена в системе лифта и запитывается непосредственно от резервного источника питания во время аварийной эвакуации, а резервный источник питания заряжается шиной постоянного тока высокой мощности, когда первичный источник питания доступен. Таким образом, по мере того, как система лифта возвращается к нормальной работе в течение определенного периода времени, может быть обеспечено то, что резервный источник питания имеет достаточно электропитания для следующей эвакуации.
На этапе S102, после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени, выполняется снятие состояния короткого замыкания двигателя и на двигателе выполняется управление с разомкнутым контуром таким образом, чтобы модуль инвертора мог применять напряжение к двигателю в соответствии с заранее определенной стратегией. Двигатель использует энергию, генерируемую скольжением кабины, для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, применяемого модулем инвертора.
В частности, выходным напряжением модуля инвертора можно управлять для того, чтобы сделать мощность двигателя отрицательной (например, если направление напряжения, применяемого модулем инвертора, противоположно направлению тока двигателя, мощность двигателя может быть отрицательной). Под отрицательной мощностью двигателя подразумевается, что энергия, генерируемая двигателем при скольжении, передается на шину постоянного тока высокой мощности.
На этапе S103, при обнаружении перехода двигателя в заранее определенное устойчивое состояние, на двигателе выполняется управление с замкнутым контуром таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью.
Ввиду того, что изменение хранящего энергию компонента на шине постоянного тока высокой мощности двигателем на этапе S102 будет повышать выходное напряжение шины постоянного тока высокой мощности, может быть обеспечено плавное переключение при переключении этого этапа на управление с разомкнутым контуром. Это вызвано тем, что если шина постоянного тока высокой мощности не имеет достаточно выходного напряжения, но прямо переключается на управление с замкнутым контуром, есть вероятность того, что выход контроллера будет интенсивным ввиду слишком низкого напряжения шины, что приведет к потере управления.
На этапе S104, при обнаружении того, что кабина лифта переместилась на заранее определенное расстояние от выравненного положения, скорость вращения двигателя снижается до нуля, а затем двигатель останавливается на основе управление с замкнутым контуром, затем скольжение кабины прекращается, так что кабина лифта останавливается в выравненном положении и дверь лифта открывается.
В данном варианте реализации двигатель переключается в состояние короткого замыкания перед активацией проскальзывания кабины лифта, так что проскальзывание кабины может начаться с малой скоростью для обеспечения того, чтобы кабина лифта не ускорялась быстро, тем самым улучшая устойчивость и безопасность начала во время операции по эвакуации. После этого реализуется управление с разомкнутым контуром, а после него следует управление с замкнутым контуром. Отрицательное напряжение подводится в двигатель через управление с разомкнутым контуром, так что двигатель может заряжать шину постоянного тока высокой мощности для повышения напряжения шины постоянного тока высокой мощности и для улучшения плавного переключения на управление с замкнутым контуром. Управление с замкнутым контуром обеспечивает двигателю возможность более плавного запуска в процессе возврата в выравненное положение, а при стоянке, скорость двигателя может быть быстро снижена до нуля на основе управления с замкнутым контуром. Таким образом, чувство безвыходности, вызванное непосредственным замыканием шкивного тормоза, будет отсутствовать, а удобство и устойчивость процесса эвакуации могут быть повышены. Резюмируя вышесказанное, в настоящей заявке отсутствует необходимость в обеспечении UPS или ARD, и затраты на аппаратное обеспечение являются низкими, при этом кабина лифта может реализовывать устойчивое управление началом, возвратом в выравненное положение и стоянку, когда первичный источник питания недоступен, а напряжение шины постоянного тока падает до очень низкого значения или даже до нуля.
Второй вариант реализации
Когда первичный источник питания доступен, источник резервного питания (такой как батарея) и устройства, связанные с перемещением лифта (такие как модуль инвертора, шкивной тормоз и т.д.), захватывают электропитание из шины постоянного тока с высокой мощностью для заряда или работы после снижения напряжения. Когда источник первичного питания недоступен, система лифта сначала сообщит об отказе и остановится, и в это время двигатель остановится до тех пор, пока обслуживающий персонал вручную или высокоуровневое программное обеспечение для управления автоматически не начнут реализацию способа эвакуации, представленного далее на Фиг. 3 данного варианта реализации. Подобным образом, способ исполняется контроллером на Фиг. 1.
На этапе S201, источник питания переключается с первичного источника питания на резервный источник питания, устройства, связанные с перемещением лифта, захватывают электропитание, соответственно, из резервного источника питания. Это может быть реализовано путем переключения входа шины постоянного тока низкой мощности на резервный источник питания посредством контроллера.
На этапе S202 выполняется проверка того, удовлетворяются ли условия эвакуации; если да, то способ переходит на этап S203, а в противном случае, шкивной тормоз замыкается и выход модуля инвертора блокируется для ожидания эвакуации вручную.
Условия эвакуации включают в себя то, что состояние резервного источника питания является устойчивым, а модуль инвертора, соединенный с двигателем, работает безотказно. Здесь, под устойчивым состоянием резервного источника питания подразумевается, что выходное напряжение резервного источника питания находится в пределах нормального рабочего диапазона.
На этапе S203 двигатель переключается в состояние короткого замыкания посредством модуля инвертора. Например, переключатели верхнего плеча мостка модуля инвертора выключаются, тогда как переключатели нижнего плеча моста модуля инвертора включаются. При этом переключатели верхнего и нижнего плеча мостка представляют собой биполярные транзисторы с изолированным затвором (IGBT).
На этапе S204, шкивной тормоз отпускается для того, чтобы кабина лифта смогла войти в состояние скольжения кабины. Это может быть реализовано путем управления контактором шкивного тормоза для его включения посредством контроллера.
На этапе S205, когда кабина лифта вошла в состояние скольжения кабины в течение заранее определенного времени, выполняется снятие состояния короткого замыкания двигателя и на двигателе выполняется управление с разомкнутым контуром таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией; причем двигатель использует энергию, генерируемую скольжением кабины для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, примененного модулем инвертора.
Предпочтительно, управление модулем инвертора выполняется для подачи напряжения uq на q-ось двигателя и напряжения ud на d-ось двигателя; при этом напряжение ud равняется 0. Когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности меньше чем αRsIq, напряжение uq равняется –Umax. Когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности больше или равняется αRsIq, напряжение uq равняется –αRsIq. При этом Rs - это сопротивление статора двигателя, Iq - это составляющая q-оси трехфазного тока двигателя, обнаруживаемая в режиме реального времени, а α - это коэффициент, который, предпочтительно, меньше чем 0,5.
На этапе S206, при обнаружении перехода двигателя в заранее определенное устойчивое состояние, на двигателе выполняется управление с замкнутым контуром таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью.
Когда двигатель находится в состоянии скольжения кабины, постоянный магнит двигателя вращается для генерирования противодействующей электродвижущей силы в обмотке статора двигателя. Под совместным действием напряжения uq, применяемого к двигателю, в обмотке статора вырабатывается ток. Крутящий момент, образуемый этим током, может предотвратить то, что скорость скольжения кабины, обеспечиваемая двигателем, будет продолжать возрастать. Чем выше скорость скольжения кабины, обеспечиваемая двигателем, тем больше противодействующая электродвижущая сила, генерируемый ток статора и крутящий момент. Таким образом, ускорение скорости скольжения кабины снижается, а также может быть снижена даже скорость скольжения кабины. Наконец, крутящий момент статора и сила притяжения достигнут равновесия, и работа двигателя достигнет заранее определенного устойчивого состояния. Заранее определенное устойчивое состояние относится к состоянию, когда скорость двигателя и тока остаются устойчивыми. Так называемая устойчивость означает, что колебания скорости и тока находятся в пределах допустимого диапазона ошибки. Чем больше указанный выше коэффициент α, тем выше скорость двигателя в устойчивом состоянии. Когда скорость и тока двигателя поддерживаются устойчивыми, может быть выбрано управление двигателем с замкнутым контуром, которое включает следующие этапы.
На этапе S2061, после того, как скорость и ток двигателя поддерживались устойчивыми, двигатель переключается с управления с разомкнутым контуром на управление с замкнутым контуром. В ходе процесса переключения происходит инициализация скорости с замкнутым контуром, тока крутящего момента с замкнутым контуром и тока возбуждения с замкнутым контуром для управления с замкнутым контуром в соответствии с текущей скоростью, тока двигателя и выходу модуля инвертора в ходе управления с разомкнутым контуром. Конкретный процесс имеет следующие аспекты.
В первом аспекте заданная скорость для скорости с замкнутым контуром устанавливается, как скорость вращения, возвращаемая двигателем в момент переключения, и, между тем, выходное значение скорости с замкнутым контуром устанавливается, как q-осевой ток крутящего момента в момент переключения.
Во втором аспекте заданный ток крутящего момента для тока крутящего момента с замкнутым контуром устанавливается, как q-осевой ток крутящего момента в момент переключения, и, между тем, выходное значение тока крутящего момента с замкнутым контуром устанавливается, как напряжение uq, применяемое к q-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром.
В третьем аспекте заданный ток возбуждения для тока возбуждения с замкнутым контуром устанавливается, как d-осевой ток возбуждения в момент переключения, и, между тем, выходное значение тока возбуждения с замкнутым контуром устанавливается, как напряжение ud, применяемое к d-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром.
Таким образом, при переключении на управление с замкнутым контуром, может быть обеспечено точное соответствие заданного значения и выходного значения управления с замкнутым контуром с фактическими условиями работы, и может быть реализовано бесподрывное переключение с управления с разомкнутым контуром на управление с замкнутым контуром.
На этапе S2062, заданная скорость для скорости с замкнутым контуром увеличивается до заранее заданной эвакуационной скорости, заданный ток крутящего момента для тока крутящего момента с замкнутым контуром устанавливается, как выходное значение скорости с замкнутым контуром, и заданный ток возбуждения для тока возбуждения с замкнутым контуром снижается до нуля.
Здесь, повышение до заранее заданной эвакуационной скорости и снижение до нуля могут представлять собой любые режимы повышения или снижения в соответствии с заданной кривой или определенным наклоном. В этом отношении нет ограничений, поэтому она может повышаться или снижаться по всей линии хода.
Когда заданная скорость для скорости с замкнутым контуром повышается до заранее заданной эвакуационной скорости, окончательная скорость двигателя и ток стремятся быть устойчивыми под управлением с замкнутым контуром.
На этапе S207, при обнаружении того, что кабина лифта переместилась на заранее определенное расстояние от выравненного положения, скорость вращения двигателя снижается до нуля, а затем двигатель останавливается на основе управление с замкнутым контуром, затем скольжение кабины прекращается, так что кабина лифта останавливается в выравненном положении и дверь лифта открывается.
В частности, в процессе скольжения кабины, при обнаружении сигнала области двери или сигнала выравненной зоны, происходит обнаружение того, что кабина лифта и выравненное положение отделены заранее заданным расстоянием, а затем заданная скорость скорости с замкнутым контуром модифицируется до нуля. Когда значение скорости вращения, возвращаемое двигателем, равняется нулю, шкивный тормоз замыкается для остановки скольжения кабины, а дверь кабины лифта открывается.
Предпочтительно, если напряжение шины постоянного тока высокой мощности выше чем начальное напряжение тормозного контура в приведенном выше процессе скольжения кабины на этапах S210-S207, тормозной контур активируется и высокое напряжение поглощается через тормозной резистор в тормозном контуре.
Кроме того, контроллер в целом может быть разделен на частотный контроллер и контроллер лифта. Контроллер инвертора, модуль инвертора и модуль выпрямителя на Фиг. 1 образуют частотный преобразователь в общем понимании. В приведенном выше процессе скольжения кабины, включающем этапы S201-S207, если в рабочей среде частотного преобразователя обнаружен сбой, шкивный тормоз замыкается, сигнал широтно-импульсной модуляции (ШИМ), выдаваемый на модуль инвертора, блокируется, и выдается соответствующая информация о сбое.
Кроме того, в приведенном выше процессе скольжения кабины, включающем этапы S201-S207, при наличии какого-либо сбоя, влияющего на работу двигателя, определяется то, превышает ли количество раз входа в состояние скольжения кабины заранее определенное количество раз скольжения кабины, например, три раза. Если это так, то шкивный тормоз замыкается и все переключатели верхнего и нижнего плеча моста в модуле инвертора, соединенном с двигателем, выключаются для ожидания эвакуации. В противном случае, двигатель переключается в состояние короткого замыкания и кабина лифта снова входит в состояние скольжения кабины.
Третий вариант реализации
Ссылаясь на Фиг. 4, в настоящем варианте реализации раскрыт контроллер, основанный на таком же техническом замысле. Контроллер содержит:
блок управления скольжением кабины, выполненный с возможностью переключения источника питания с первичного источника питания на резервный источник питания, переключения двигателя в состояние короткого замыкания и обеспечения перехода кабины лифта в состояние скольжения кабины при обнаружении того, что первичный источник питания недоступен,
блок управления с разомкнутым контуром, который выполнен с возможностью снятия состояния короткого замыкания двигателя и осуществления на двигателе управления с разомкнутым контуром после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией; причем двигатель использует энергию, генерируемую скольжением кабины для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, примененного модулем инвертора;
блок управления с замкнутым контуром, который выполнен с возможностью осуществления на двигателе управления с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью;
блок управления тормозом, который выполнен с возможностью снижения скорости вращения двигателя до нуля и остановки двигателя на основе управления с замкнутым контуром, и последующей остановки скольжения кабины таким образом, чтобы кабина лифта остановилась в выравненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выравненного положения.
В предпочтительном варианте реализации блок управления с разомкнутым контуром дополнительно содержит шину постоянного тока высокой мощности, который выполнен с возможностью управления модулем инвертора для подачи напряжения uq на q-ось двигателя и напряжения ud на d-ось двигателя; причем напряжение ud равняется 0. Когда максимальное выходное напряжение шины постоянного тока высокой мощности меньше чем αRsIq, напряжение uq равняется максимальному выходному напряжению шины постоянного тока высокой мощности. Когда максимальное выходное напряжение шины постоянного тока высокой мощности больше или равняется αRsIq, напряжение uq равняется –αRsIq. При этом Rs - это сопротивление статора двигателя, Iq - это составляющая q-оси трехфазного тока двигателя, обнаруживаемая в режиме реального времени, а α - это коэффициент, который, предпочтительно, меньше чем 0,5.
В предпочтительном варианте реализации блок управления с замкнутой обратной связью дополнительно содержит:
блок переключения, который выполнен с возможностью переключения двигателя с управления с разомкнутым контуром на управление с замкнутым контуром после обеспечения устойчивости скорости двигателя и тока, причем в ходе процесса переключения происходит инициализация скорости с замкнутым контуром, тока крутящего момента с замкнутым контуром и тока возбуждения с замкнутым контуром для управления с замкнутым контуром в соответствии с текущей скоростью и током двигателя и выходом модуля инвертора в ходе управления с разомкнутым контуром;
блок регулировки, который выполнен с возможностью повышения заданной скорости для скорости с замкнутым контуром до заранее заданной эвакуационной скорости, установки заданного тока крутящего момента для тока крутящего момента с замкнутым контуром, как выходного значения скорости с замкнутым контуром, и снижения заданного тока возбуждения для тока возбуждения с замкнутым контуром до нуля.
В более предпочтительном варианте реализации блок переключения дополнительно содержит:
блок инициализации скорости с замкнутым контуром, который выполнен с возможностью установки заданной скорости для скорости с замкнутым контуром, как скорости вращения, возвращаемой двигателем в момент переключения, и, между тем, установки выходного значения скорости с замкнутым контуром, как q-осевого тока крутящего момента в момент переключения;
блок инициализации тока крутящего момента с замкнутым контуром, который выполнен с возможностью установки заданного тока крутящего момента для тока крутящего момента с замкнутым контуром, как q-осевого тока крутящего момента в момент переключения, и, между тем, установки выходного значения тока крутящего момента с замкнутым контуром, как напряжения uq, применяемого к q-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром;
блок инициализации тока возбуждения с замкнутым контуром, который выполнен с возможностью установки заданного тока возбуждения для тока возбуждения с замкнутым контуром, как d-осевого тока возбуждения в момент переключения, и, между тем, установки выходного значения тока возбуждения с замкнутым контуром, как напряжения ud, применяемого к d-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром.
В более предпочтительном варианте реализации блок управления тормозом дополнительно содержит:
блок модификации скорости, который выполнен с возможностью модификации заданной скорости для скорости с замкнутым контуром до нуля при обнаружении сигнала области двери или выравненной зоны;
блок управления шкивным тормозом и дверью, который выполнен с возможностью замыкания шкивного тормоза для прерывания скольжения кабины для остановки кабины лифта в выравненном положении и открытия двери кабины лифта, когда значение скорости вращения, возвращаемое двигателем, равняется нулю.
Другие подробности могут относиться к первому и второму вариантам реализации, которые не будут повторяться здесь.
Следует отметить, что представленное выше описание включает в себя различные модули (и, подобным образом, блоки). Как правило, эти модули включают в себя аппаратное обеспечение и/или комбинацию аппаратного и программного обеспечения (например, «замороженного» (solidified) программного обеспечения). Эти модули также могут включать в себя читаемые на компьютере носители информации (такие как постоянные носители информации), содержащие инструкции (такие как программные инструкции). При исполнении этих инструкций процессором могут быть выполнены различные функциональные признаки настоящего изобретения. Следовательно, объем настоящей заявки не ограничивается конкретными аппаратными и/или программными признаками в модулях, которые явным образом указаны в вариантах реализации, если это явным образом не требуется. В качестве неограничивающего примера, программные инструкции (такие как те, которые хранятся в непостоянной памяти и/или постоянной памяти) могут быть исполнены одним или более контроллерами.
Четвертый вариант реализации
Ссылаясь на Фиг. 5 и основываясь на том же самом техническом замысле, в настоящем варианте реализации раскрыт контроллер, который содержит память и процессор, причем память выполнена с возможностью хранения компьютерной программы, которая может быть исполнена процессором, причем при исполнении компьютерной программы процессором происходит реализация этапов способа эвакуации лифта, описанного в первом и втором вариантах реализации.
Пятый вариант реализации
Ссылаясь на Фиг. 6, в пятом варианте реализации раскрыта система эвакуации лифта, содержащая модуль выпрямителя, шину постоянного тока высокой мощности 540-570 В, модуль инвертора, понижающий преобразователь, переключатель, резервный источник питания, преобразователь постоянного тока в постоянный ток и контроллер, описанный в третьем и четвертом вариантах реализации. Модуль выпрямителя, шина постоянного тока высокой мощности и модуль инвертора соединены последовательно. Модуль выпрямителя выпрямляет подачу трехфазного питания от сети внешнего питания в напряжение постоянного тока и вводит его в шину постоянного тока высокой мощности 540-570 В. Модуль инвертора преобразует мощность постоянного тока в шине постоянного тока высокой мощности в мощность переменного тока и выдает мощность переменного тока на двигатель под управлением контроллера.
Понижающий преобразователь соединен с шиной постоянного тока высокой мощности для понижения напряжения шины постоянного тока высокой мощности и выдачи мощности постоянного тока с пониженным напряжением.
Резервный источник питания соединен с понижающим преобразователем для захвата электропитания из понижающего преобразователя для заряда при нормальной подаче питания.
Переключатель соединен с понижающим преобразователем, резервным источником питания, контроллером и преобразователем постоянного тока в постоянный ток, соответственно, для выбора одного источника выдачи постоянного тока из понижающего преобразователя и резервного источника питания под управлением контроллера.
Преобразователь постоянного тока в постоянный ток содержит входной порт и множество выходных портов, причем входной порт соединен с переключателем, а множество выходных портов, соответственно, соединен с модулем инвертора, контроллером и другими устройствами, связанными с перемещением лифта, для реализации преобразования напряжения источника выдачи постоянного тока, выбранного переключателем, и выдачи рабочего напряжения на модуль инвертора, контроллер и другие устройства, связанные с перемещением лифта. Например, преобразователь постоянного тока в постоянный ток может выполнять преобразование напряжения на источнике выдачи постоянного тока, выбранном переключателем для получения выдаваемой мощности постоянного тока 5 В, 24 В, ± 15 В.
В частности, в этом варианте реализации резервный источник питания представляет собой батарею, а переключатель может представлять собой реле. Общий порт реле соединен с преобразователем постоянного тока в постоянный ток через шину постоянного тока низкой мощности 24 В, нормально замкнутый контакт реле соединен с пониающим преобразователем, нормально разомкнутый контакт реле соединен с батареей, а катушка реле соединена с контроллером.
Можно увидеть, что шина постоянного тока низкой мощности 24 В, как правило, запитывается от шины постоянного тока высокой мощности 540-570 В после снижения напряжения. При аварийной эвакуации она запитывается непосредственно от батареи, которая заряжается шиной постоянного тока высокой мощности 540-570 в ходе нормальной работы. Таким образом, по мере того, как система лифта возвращается к нормальной работе в течение определенного периода времени, может быть обеспечено то, что батарея имеет достаточно питания для следующей эвакуации.
Конкретный процесс эвакуации в варианте реализации может относиться к первому и пятому вариантам реализации, которые не будут повторяться здесь.
Резюмируя вышесказанное, благодаря реализации способа и системы для эвакуации лифта, и контроллера, в соответствии с настоящей заявкой, можно достичь нескольких преимуществ. В настоящем изобретении двигатель переключается в состояние короткого замыкания перед активацией проскальзывания кабины лифта, так что проскальзывание кабины может начаться с малой скоростью для обеспечения того, чтобы кабина лифта не ускорялась быстро, тем самым улучшая устойчивость и безопасность начала во время операции по эвакуации. После этого реализуется управление с разомкнутым контуром, а после него следует управление с замкнутым контуром. Отрицательное напряжение подводится в двигатель через управление с разомкнутым контуром, так что двигатель может заряжать шину постоянного тока высокой мощности для улучшения плавного переключения на управление с замкнутым контуром. Управление с замкнутым контуром обеспечивает двигателю возможность более плавного запуска в процессе возврата на выравненный уровень, а при стоянке, скорость двигателя может быть быстро снижена до нуля на основе управления с замкнутым контуром. Таким образом, чувство безвыходности, вызванное непосредственным замыканием шкивного тормоза, будет отсутствовать, а удобство и устойчивость процесса эвакуации могут быть повышены. Резюмируя вышесказанное, в настоящей заявке отсутствует необходимость в обеспечении UPS или ARD, и затраты на аппаратное обеспечение являются низкими, при этом лифт может реализовывать устойчивое управление началом, возвратом на выравненный уровень и стоянку, когда первичный источник питания недоступен, а напряжение шины постоянного тока падает до очень низкого значения или даже до нуля.
Такие слова, как «равняется», «между тем» или другие подобные термины не ограничиваются абсолютным равенством или тождественностью математических терминов. При реализации прав, описанных в настоящей заявке, они могут быть подобными в проектном смысле или в пределах допустимого диапазона ошибки.
Приведенное выше описание относится к различным элементам. Как правило, эти блоки и модули включают в себя аппаратное обеспечение и/или комбинацию аппаратного и программного обеспечения (например, «замороженного» (solidified) программного обеспечения). Следует отметить, что в приведенном выше описании различных блоков эти блоки разделены лишь для обеспечения ясности. Однако на практике границы между различными блоками могут быть нечеткими. Следовательно, объем настоящей заявки не ограничивается обязательными границами между различными аппаратными и/или программными элементами, если явным образом не требуется иное.
Вариант реализации настоящего изобретения описан выше в сочетании с прилагаемыми чертежами. Однако настоящее изобретение не ограничивается указанными выше конкретными вариантами реализации. Указанные выше конкретные варианты реализации являются лишь схематическими, а не ограничительными. Средний специалист в данной области техники сможет выполнить множество форм без выхода за рамки объема, защищаемого целью и формулой настоящего изобретения. Все они входят в объем защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕСПЕРЕБОЙНОЙ РАБОТЫ ДВИГАТЕЛЯ ЛЕБЕДКИ ЛИФТА, ПРИВОД ЛИФТА И СПОСОБ ОБЕСПЕЧЕНИЯ БЕСПЕРЕБОЙНОЙ ПОДАЧИ ПИТАНИЯ НА ДВИГАТЕЛЬ ЛЕБЕДКИ ЛИФТА | 2006 |
|
RU2401792C1 |
| СИСТЕМА ПИТАНИЯ ЛИФТА И ЗДАНИЯ С УПРАВЛЕНИЕМ ВТОРИЧНЫМ ИСТОЧНИКОМ ПИТАНИЯ | 2008 |
|
RU2490201C2 |
| Лифт | 2018 |
|
RU2760796C2 |
| Устройство и способ управления движением кабины лифта | 2015 |
|
RU2655257C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТА В АВАРИЙНОМ РЕЖИМЕ | 2008 |
|
RU2484003C2 |
| Преобразователь частоты со встроенным источником резервного питания | 2016 |
|
RU2644385C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ ОТ НЕСКОЛЬКИХ ИСТОЧНИКОВ В СИСТЕМЕ ПИТАНИЯ ЛИФТА | 2008 |
|
RU2495813C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ ОТ НЕСКОЛЬКИХ ИСТОЧНИКОВ НА ОСНОВАНИИ МОДЕЛИ ИСПОЛЬЗОВАНИЯ ЛИФТА | 2008 |
|
RU2516911C2 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| Система эвакуации и навигации в зданиях | 2020 |
|
RU2760114C1 |
Предложены способ и система для эвакуации лифта и контроллер. Переключают двигатель в состояние короткого замыкания, кабину лифта переводят в состояние скольжения при обнаружении того, что первичный источник питания недоступен. По прошествии заранее заданного времени снимают состояния короткого замыкания двигателя и осуществляют на двигателе управление с разомкнутым контуром таким образом, чтобы модуль инвертора применял напряжение к двигателю. При этом двигатель использует энергию, генерируемую скольжением для заряда хранящего энергию компонента на шине постоянного тока высокой мощности после обнаружения напряжения, примененного модулем инвертора. Осуществляют на двигателе управление с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости. Снижают скорость вращения двигателя до нуля и останавливают двигатель на основе управления с замкнутым контуром. Далее останавливают скольжение кабины таким образом, чтобы кабина лифта остановилась в выровненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выровненного положения. Описанный способ обеспечивает возможность управления лифтом с плавным запуском, обратным выравниванием и остановкой кабины, когда первичный источник питания недоступен, а напряжение шины постоянного тока падает до очень низкого или даже до нуля. 3 н. и 14 з.п. ф-лы, 6 ил.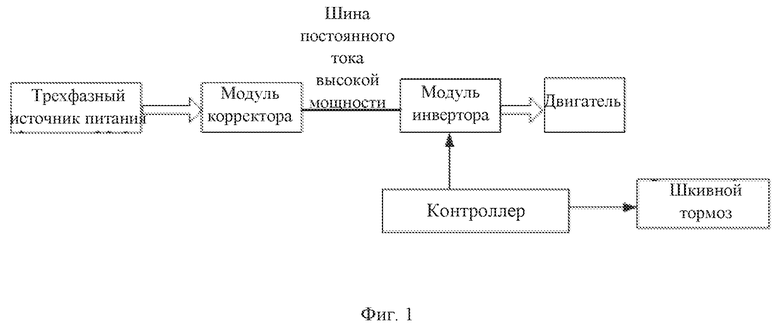
1. Способ эвакуации лифта, включающий следующие этапы:
переключение источника питания с первичного источника питания на резервный источник питания, переключение двигателя в состояние короткого замыкания и обеспечение перехода кабины лифта в состояние скольжения кабины при обнаружении того, что первичный источник питания недоступен,
снятие состояния короткого замыкания двигателя и осуществление на двигателе управления с разомкнутым контуром после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией; причем двигатель заряжает хранящий энергию компонент на шине постоянного тока высокой мощности энергией, вырабатываемой скольжением кабины, после обнаружения напряжения, примененного модулем инвертора;
осуществление на двигателе управления с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью;
снижение скорости вращения двигателя до нуля и остановку двигателя на основе управления с замкнутым контуром, и последующую остановку скольжения кабины таким образом, чтобы кабина лифта остановилась в выровненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выровненного положения.
2. Способ эвакуации лифта по п. 1, отличающийся тем, что этап выполнения управления с разомкнутым контуром на двигателе таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией, дополнительно включает:
управление модулем инвертора для подачи напряжения uq на q-ось двигателя и напряжения ud на d-ось двигателя; при этом напряжение ud равняется 0; причем когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности меньше, чем αRsIq, напряжение uq равняется –Umax; когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности больше или равняется αRsIq, напряжение uq равняется –αRsIq; при этом Rs - это сопротивление статора двигателя, Iq - это составляющая q-оси трехфазного тока двигателя, обнаруживаемая в режиме реального времени, а α - это коэффициент.
3. Способ эвакуации лифта по п. 1, отличающийся тем, что этап выполнения управления с замкнутым контуром на двигателе при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью, дополнительно включает:
переключение двигателя с управления с разомкнутым контуром на управление с замкнутым контуром и инициализацию скорости с замкнутым контуром, тока крутящего момента с замкнутым контуром и тока возбуждения с замкнутым контуром для управления с замкнутым контуром в соответствии с текущей скоростью и током двигателя, и выходом модуля инвертора при управлении с открытым контуром в ходе процесса переключения, после чего скорость двигателя и ток поддерживаются стабильными;
повышение заданной скорости для скорости с замкнутым контуром до заранее заданной эвакуационной скорости, установку заданного тока крутящего момента для тока крутящего момента с замкнутым контуром как выходного значения скорости с замкнутым контуром, и снижение заданного тока возбуждения для тока возбуждения с замкнутым контуром до нуля.
4. Способ эвакуации лифта по п. 3, отличающийся тем, что этап инициализации скорости с замкнутым контуром, тока крутящего момента с замкнутым контуром и тока возбуждения с замкнутым контуром для управления с замкнутым контуром в соответствии с текущей скоростью и током двигателя и выходом модуля инвертора при управлении с открытым контуром в ходе процесса переключения, дополнительно включает:
установку заданной скорости для скорости с замкнутым контуром как значения скорости вращения, возвращаемого двигателем в момент переключения, и, между тем, установку выходного значения скорости с замкнутым контуром как q-осевого тока крутящего момента в момент переключения;
установку заданного тока крутящего момента для тока крутящего момента с замкнутым контуром как q-осевого тока крутящего момента в момент переключения и, между тем, установку выходного значения тока крутящего момента с замкнутым контуром как напряжения uq, применяемого к q-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром;
установку заданного тока возбуждения для тока возбуждения с замкнутым контуром как d-осевого тока возбуждения в момент переключения и, между тем, установку выходного значения тока возбуждения с замкнутым контуром как напряжения ud, применяемого к d-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром.
5. Способ эвакуации лифта по п. 1, отличающийся тем, что этап снижения скорости вращения двигателя до нуля и остановку двигателя на основе управления с замкнутым контуром, и последующую остановку скольжения кабины таким образом, чтобы кабина лифта остановилась в выровненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выровненного положения, дополнительно включает:
модификацию заданной скорости для скорости с замкнутым контуром до нуля при обнаружении сигнала области двери или выровненной зоны; и
замыкание шкивного тормоза для прерывания скольжения кабины для остановки кабины лифта в выровненном положении и открытия двери кабины лифта, когда значение скорости вращения, возвращаемое двигателем, равняется нулю.
6. Способ эвакуации лифта по п. 1, отличающийся тем, что этап переключения двигателя в состояние короткого замыкания и входа кабины лифта в состояние скольжения кабины дополнительно включает:
выключение всех переключателей верхнего плеча моста в модуле инвертора и включение всех переключателей нижнего плеча моста в модуле инвертора, а затем отпускание шкивного тормоза для вхождения кабины лифта в состояние скольжения кабины; причем переключатели верхнего и нижнего плеча моста представляют собой биполярные транзисторы с изолированным затвором.
7. Способ эвакуации лифта по п. 1, который дополнительно включает:
активацию тормозного контура для поглощения высокого напряжения через тормозной резистор в тормозном контуре, если напряжение шины постоянного тока высокой мощности в ходе процесса скольжения кабины выше чем начальное напряжение тормозного контура.
8. Способ эвакуации лифта по п. 1, который дополнительно включает:
замыкание шкивного тормоза, блокирование сигнала широтно-импульсной модуляции, выдаваемого на модуль инвертора, и выдачу соответствующей информации о сбое, если в рабочей среде частотного преобразователя в ходе процесса скольжения кабины обнаружен сбой.
9. Способ эвакуации лифта по п. 1, который дополнительно включает:
определение того, превышает ли количество входов в состояние скольжения кабины заранее определенное количество раз скольжения кабины, если в процессе скольжения кабины имеет место какой-либо сбой, влияющий на работу двигателя, и если это так, замыкание шкивного тормоза и выключение всех переключателей верхнего и нижнего плеча моста в модуле инвертора, соединенном с двигателем, для ожидания эвакуации, в противном случае, переключение двигателя в состояние короткого замыкания и обеспечение входа кабины лифта вновь в состояние скольжения кабины.
10. Способ эвакуации лифта по п. 1, который дополнительно включает:
зарядку резервного источника питания и запитывание устройств, связанных с перемещением лифта, пониженным напряжением от шины постоянного тока высокой мощности при доступности первичного источника питания.
11. Контроллер, содержащий:
блок управления скольжением кабины, выполненный с возможностью переключения источника питания с первичного источника питания на резервный источник питания, переключения двигателя в состояние короткого замыкания и обеспечения входа кабины лифта в состояние скольжения кабины при обнаружении того, что первичный источник питания недоступен,
блок управления с разомкнутым контуром, который выполнен с возможностью снятия состояния короткого замыкания двигателя и осуществления на двигателе управления с разомкнутым контуром после входа кабины лифта в состояние скольжения кабины в течение заранее определенного времени таким образом, чтобы модуль инвертора применял напряжение к двигателю в соответствии с заранее определенной стратегией; причем двигатель заряжает хранящий энергию компонент на шине постоянного тока высокой мощности энергией, вырабатываемой скольжением кабины, после обнаружения напряжения, примененного модулем инвертора;
блок управления с замкнутым контуром, который выполнен с возможностью осуществления на двигателе управления с замкнутым контуром при обнаружении того, что двигатель переходит в заранее определенное устойчивое состояние, таким образом, чтобы скорость вращения двигателя достигала заранее определенной эвакуационной скорости и двигатель работал в соответствии с заранее определенной эвакуационной скоростью;
блок управления тормозом, который выполнен с возможностью снижения скорости вращения двигателя до нуля и остановки двигателя на основе управления с замкнутым контуром и последующей остановки скольжения кабины таким образом, чтобы кабина лифта остановилась в выровненном положении и дверь кабины лифта была открыта, при обнаружении того, что кабина лифта перемещается на заранее определенное расстояние из выровненного положения.
12. Контроллер по п. 11, отличающийся тем, что блок управления с разомкнутым контуром дополнительно содержит блок зарядки шины постоянного тока высокой мощности, который выполнен с возможностью управления модулем инвертора для подачи напряжения uq на q-ось двигателя и напряжения ud на d-ось двигателя; при этом напряжение ud равняется 0; причем когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности меньше, чем αRsIq, напряжение uq равняется –Umax; когда максимальное выходное напряжение Umax шины постоянного тока высокой мощности больше или равняется αRsIq, напряжение uq равняется –αRsIq; при этом Rs - это сопротивление статора двигателя, Iq - это составляющая q-оси трехфазного тока двигателя, обнаруживаемая в режиме реального времени, а α - это коэффициент.
13. Контроллер по п. 11, отличающийся тем, что блок управления с замкнутым контуром дополнительно содержит:
блок переключения, который выполнен с возможностью переключения двигателя с управления с разомкнутым контуром на управление с замкнутым контуром и инициализацию скорости с замкнутым контуром, тока крутящего момента с замкнутым контуром и тока возбуждения с замкнутым контуром для управления с замкнутым контуром в соответствии с текущей скоростью и током двигателя, и выходом модуля инвертора при управлении с открытым контуром в ходе процесса переключения, после чего скорость двигателя и ток поддерживаются стабильными;
блок регулировки, который выполнен с возможностью повышения заданной скорости для скорости с замкнутым контуром до заранее заданной эвакуационной скорости, установки заданного тока крутящего момента для тока крутящего момента с замкнутым контуром как выходного значения скорости с замкнутым контуром и снижения заданного тока возбуждения для тока возбуждения с замкнутым контуром до нуля.
14. Контроллер по п. 13, отличающийся тем, что блок переключения дополнительно содержит:
блок инициализации скорости с замкнутым контуром, который выполнен с возможностью установки заданной скорости для скорости с замкнутым контуром как значения скорости вращения, возвращаемой двигателем в момент переключения, и, между тем, установки выходного значения скорости с замкнутым контуром как q-осевого тока крутящего момента в момент переключения;
блок инициализации тока крутящего момента с замкнутым контуром, который выполнен с возможностью установки заданного тока крутящего момента для тока крутящего момента с замкнутым контуром как q-осевого тока крутящего момента в момент переключения и, между тем, установки выходного значения тока крутящего момента с замкнутым контуром как напряжения uq, применяемого к q-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром;
блок инициализации тока возбуждения с замкнутым контуром, который выполнен с возможностью установки заданного тока возбуждения для тока возбуждения с замкнутым контуром как d-осевого тока возбуждения в момент переключения и, между тем, установки выходного значения тока возбуждения с замкнутым контуром как напряжения ud, применяемого к d-оси двигателя модулем инвертора в последний момент в ходе управления с разомкнутым контуром.
15. Контроллер по п. 11, отличающийся тем, что блок управления тормозом дополнительно содержит:
блок модификации скорости, который выполнен с возможностью модификации заданной скорости для скорости с замкнутым контуром до нуля при обнаружении сигнала области двери или выровненной зоны;
блок управления шкивным тормозом и дверью, который выполнен с возможностью замыкания шкивного тормоза для прерывания скольжения кабины для остановки кабины лифта в выровненном положении и открытия двери кабины лифта, когда значение скорости вращения, возвращаемое двигателем, равняется нулю.
16. Контроллер, который содержит память и процессор, причем память выполнена с возможностью хранения компьютерной программы, которая может быть исполнена процессором, причем при исполнении компьютерной программы процессором происходит реализация этапов способа эвакуации лифта по любому из пп. 1-10.
17. Система для эвакуации лифта, которая содержит модуль выпрямителя, шину постоянного тока высокой мощности, модуль инвертора, понижающий преобразователь, переключатель, резервный источник питания, преобразователь постоянного тока в постоянный ток и контроллер по любому из пп. 11-15; причем модуль выпрямителя, шина постоянного тока высокой мощности и модуль инвертора соединены последовательно;
понижающий преобразователь соединен с шиной постоянного тока высокой мощности для понижения напряжения шины постоянного тока высокой мощности и выдачи пониженного напряжения;
резервный источник питания соединен с понижающим преобразователем для захвата электропитания из понижающего преобразователя для заряда при нормальной подаче питания;
переключатель соединен с понижающим преобразователем, резервным источником питания, контроллером и преобразователем постоянного тока в постоянный ток, соответственно, для выбора по меньшей мере одного источника выдачи постоянного тока из понижающего преобразователя и резервного источника питания под управлением контроллера;
преобразователь постоянного тока в постоянный ток содержит входной порт и множество выходных портов, причем входной порт соединен с переключателем, а множество выходных портов соответственно соединены с модулем инвертора, контроллером и другими устройствами, связанными с перемещением лифта, для реализации преобразования напряжения источника выдачи постоянного тока, выбранного переключателем, и выдачи рабочего напряжения на модуль инвертора, контроллер и другие устройства, связанные с перемещением лифта.
| CN 101780906A, 21.07.2010 | |||
| US 2017247222A1, 31.08.2017 | |||
| CN 104310148A, 28.01.2015. |

