Изобретение относится к области измерения механических колебаний и может быть использовано для бесконтактного измерения и непрерывного контроля параметров колебаний турбинных и компрессорных лопаток в эксплуатационных условиях.
Известен способ определения параметров колебаний лопаток турбомашин, основанный на бесконтактном съеме информации о колебаниях вращающихся лопаток, заключающийся в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру к плоскости вращения лопаток, выделении частоты Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получении автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями (патент РФ №2324907, G01H 11/00, G01M 13/00, Бюл. №14, 2008 г.).
Известно устройство для определения амплитуд колебаний лопаток турбомашин, содержащее последовательно соединенные радиолокационное устройство, выполняющее роль датчика, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств (патент РФ №2324907, G01H 11/00, G01M 13/00, Бюл. №14, 2008 г.).
Недостатком известного способа и устройства является отсутствие информации о скорости вращения турбинных и компрессорных лопаток турбомашины.
Технический результат изобретения - увеличение числа измеряемых параметров лопаток турбомашины за счет дополнительного измерения скорости вращения лопаток турбомашины.
Технический результат достигается в способе определения параметров колебаний лопаток турбомашин, заключающемся в том, что осуществляют установку радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделяют частоты Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделяют частоту Доплера сигнала от каждой движущейся лопатки, получают автокорреляционные функции сигналов, полученных для каждой 1-й лопатки, определяют амплитуду колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями, дополнительно определяют текущую скорость вращения лопаток турбомашин на основе последовательно соединенных блока определения скорости вращения лопаток турбомашины и индикатора скорости вращения лопаток турбомашины, причем выход радиолокационного устройства соединен с входом блока определения скорости вращения лопаток турбомашины.
Заявляемый способ реализуется в устройстве определения параметров колебаний лопаток турбомашин, содержащем последовательно соединенные радиолокационное устройство, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств, в которое дополнительно введены последовательно соединенные блок определения скорости вращения лопаток турбомашин и индикатор скорости вращения лопаток турбомашин, причем выход радиолокационного устройства соединен с входом блока определения скорости вращения лопаток турбомашины.
Блок определения скорости вращения лопаток турбомашин содержит генератор сигналов, сдвиговый регистр, первый, второй, третий элементы И, первый, второй и третий элементы НЕ, первый, второй и третий счетчик, элемент ИЛИ и дифференцирующую цепь, причем входом блока определения скорости вращения лопаток турбомашины является первый вход сдвигового регистра, второй и третий входы которого соединены соответственно с выходом генератора импульсов и выходом дифференцирующей цепи, вход которой соединен с выходом элемента ИЛИ, первый и второй входы которого соединены соответственно с выходом источника питания и четвертым выходом сдвигового регистра, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно со вторым входом первого элемента И, со входом первого элемента НЕ и одновременно со вторым входом второго элемента И, с входом второго элемента НЕ и одновременно со вторым входом третьего элемента И, входом третьего элемента НЕ, выходы первого, второго, третьего элементов НЕ, соединены соответственно с третьими входами первого, второго и третьего элементов И, выходы которых соединены соответственно с первыми входами первого, второго и третьего счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, а выходы первого, второго и третьего счетчиков являются выходами блока определения скорости вращения лопаток турбомашины.
На чертеже приведена функциональная схема устройства определения параметров колебаний лопаток турбомашин.
Устройство для определения параметров колебаний лопаток турбомашин содержит последовательно соединенные радиолокационное устройство 1, выполняющее роль датчика, блок 2 выделения частот Доплера, блок 3 получения автокорреляционных функций, блок 4 пороговых устройств, блок 5 определения скорости вращения лопаток турбомашин и индикатор 6 скорости вращения лопаток турбомашин.
Блок 5 определения скорости вращения лопаток турбомашин содержит генератор 7 сигналов, сдвиговой регистр 8, первый 9, второй 10, третий 11 элементы И, первый 12, второй 13 и третий 14 элементы НЕ, первый 15, второй 16 и третий 17 счетчик, элемент ИЛИ 18 и дифференцирующую цепь 19.
Принцип работы устройства заключается в следующем.
Радиолокационное устройство 1, установленное под острым углом к перпендикуляру траектории вращения кромок лопаток, осуществляет излучение и прием радиолокационного сигнала. Частоты Доплера сигнала, отраженного от вращающихся лопаток турбомашины, выделяются в блоке 3 выделения частот Доплера и поступают на входы блока 4 получения автокорреляционных функций. На выходах данного блока 4 формируются автокорреляционные функции сигналов, отраженных от каждой 1-й лопатки. Амплитуда автокорреляционных функций зависит от амплитуды колебаний каждой i-й лопатки.
В блоке 4 пороговых устройств осуществляется сравнение значений амплитуд автокорреляционных функций с порогами. При превышении одного из пороговых значений сигнала формируется сигнал о превышении амплитуды колебаний i-й лопатки заданного значения.
Одновременно с выхода радиолокационного устройства 1 отраженные от вращающихся лопаток турбомашины сигналы поступают на вход блока 5 определения скорости вращения лопаток турбомашин и соответственно на первый вход сдвигового регистра 8.
В исходном состоянии в момент включения источника питания происходит обнуления логических элементов по цепи источник питания, первый вход элемента ИЛИ 18, дифференцирующая цепь 19, третий вход сдвигового регистра 8, вторые входы первого 15, второго 16 и третьего 17 счетчиков.
С первого, второго и третьего выходов сдвигового регистра 8 сигналы последовательно поступают на вторые входы первого 9, второго 10 и третьего 11 элементов И, на первые входы которых поступают импульсы с генератора 7 сигнала.
В момент поступления сигнала с первого выхода сдвигового регистра 8 на второй вход первого 9 элемента И через его первый вход обеспечивается поступление импульсов от генератора 7 сигналов на первый вход первого 15 счетчика.
В момент поступления сигнала со второго выхода сдвигового регистра 8 на вход первого 12 элемента НЕ прекращается поступления импульсов с выхода генератора 7 сигналов на первый вход первого 15 счетчика за счет снятия сигнала с выхода первого 12 элемента НЕ и соответственно с выхода первого 9 элемента И.
Таким образом, на выходе первого 15 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал со второго выхода сдвигового регистра 8 поступает на второй вход второго 10 элемента И, с выхода которого поступает на первый вход второго 16 счетчика.
В момент поступления сигнала с третьего выхода сдвигового регистра 8 на вход второго 13 элемента НЕ прекращается поступление импульсов с выхода генератора 7 сигналов на первый вход второго 16 счетчика за счет снятия сигнала с выхода второго 13 элемента НЕ и соответственно с третьего входа второго 10 элемента И.
Таким образом, на выходе второго 16 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал с третьего выхода сдвигового регистра 8 поступает на второй вход третьего 11 элемента И, с выхода которого поступает на первый вход третьего 17 счетчика.
В момент поступления сигнала с четвертого выхода сдвигового регистра 8 на вход третьего 14 элемента НЕ прекращается поступление импульсов с выхода генератора 7 сигналов на первый вход третьего 17 счетчика за счет снятия сигнала с выхода второго 14 элемента НЕ и соответственно с третьего входа третьего 11 элемента И.
Таким образом, на выходе третьего 16 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал с четвертого выхода сдвигового регистра 8 поступает через элемент ИЛИ на вход дифференцирующей цепи 18, с выхода которой поступает сигнал обнуления на третий вход сдвигового регистра и вторые входы первого 15, второго 16 и третьего 17 счетчиков и обеспечивается следующий цикл измерений.
Сигналы с выходов счетчиков (15, 16, 17) поступают на входы индикатора 6 скорости вращения лопаток турбомашин.
Таким образом, происходит увеличение числа измеряемых параметров лопаток турбомашины за счет дополнительного измерения скорости вращения лопаток турбомашины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ БОЕПРИПАСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2519617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ БОЕПРИПАСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2519611C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ | 2008 |
|
RU2360204C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324907C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448853C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539825C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2426974C2 |
Изобретение относится к области измерения параметров механических колебаний и может быть использовано для бесконтактного измерения и непрерывного контроля амплитуды и частоты колебаний турбинных и компрессорных лопаток в эксплуатационных условиях. Техническим результатом изобретения является увеличение числа измеряемых параметров лопаток турбомашины. Технический результат достигается за счет установки радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделения частот Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделения частоты Доплера сигнала от каждой движущейся лопатки, получения автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определения амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с порогом, по результатам сравнения судят об амплитуде колебаний, дополнительно определяют текущие значения скорости вращения лопаток турбомашины. В устройство дополнительно введены последовательно соединенные блок определения скорости вращения лопаток турбомашины и индикатор скорости вращения лопаток турбомашины, причем выход радиолокационного устройства соединен с входом блока определения вращения лопаток турбомашины. 2 н. и 1 з.п. ф-лы, 1 ил.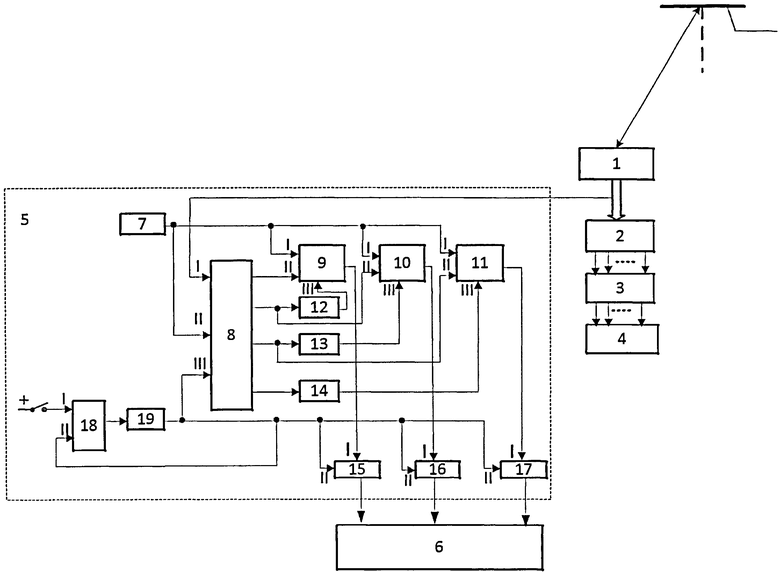
1. Способ определения параметров колебаний лопаток турбомашин, заключающийся в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделении частот Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получении автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями, при этом по результатам сравнения судят об амплитуде колебаний лопаток, отличающийся тем, что определяют текущее значение скорости вращения лопаток турбомашины на основе последовательно соединенных блока определения скорости вращения лопаток турбомашины и индикатора скорости вращения лопаток турбомашины, причем выход радиолокационного устройства соединен с входом блока определения скорости вращения лопаток турбомашины.
2. Устройство для определения параметров колебаний лопаток турбомашин, содержащее последовательно соединенные радиолокационное устройство, выполняющее роль датчика, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств, отличающееся тем, что содержит последовательно соединенные блок определения скорости вращения лопаток турбомашины и индикатор скорости вращения лопаток турбомашины, причем выход радиолокационного устройства соединен со входом блока определения скорости вращения лопаток турбомашины.
3. Устройство для определения параметров колебаний лопаток турбомашины по п.2, отличающееся тем, что блок определения скорости вращения лопаток турбомашины содержит генератор импульсов, сдвиговый регистр, первый, второй, третий элементы И, первый, второй и третий элементы НЕ, первый, второй и третий счетчик, элемент ИЛИ и дифференцирующую цепь, причем входом блока определения скорости вращения лопаток турбомашины является первый вход сдвигового регистра, второй и третий входы которого соединены соответственно с выходом генератора импульсов и выходом дифференцирующей цепи, вход которой соединен с выходом элемента ИЛИ, первый и второй входы которого соединены соответственно с выходом источника питания и четвертым выходом сдвигового регистра, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно со вторым входом первого элемента И, со входом первого элемента НЕ и одновременно со вторым входом второго элемента И, с входом второго элемента НЕ и одновременно со вторым входом третьего элемента И, входом третьего элемента НЕ, выходы первого, второго, третьего элементов НЕ соединены соответственно с третьими входами первого, второго и третьего элементов И, выходы которых соединены соответственно с первыми входами первого, второго и третьего счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, а выходы первого, второго и третьего счетчиков являются выходами блока определения скорости вращения лопаток турбомашины.
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324907C1 |
| ЭЛЕКТРОННОЛУЧЕВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ«ЭЛУРА» | 0 |
|
SU236827A1 |
| Щеголев В.В | |||
| Повышение быстродействия статистического определения амплитуд колебаний лопаток турбомашин дискретно-фазовым методом | |||
| - Известия Самарского научного центра Российской академии наук, 2003, т.5, №2 | |||
| WO 1997032186 А1, 04.09.1997. | |||

