Изобретение относится к прицельным системам и может быть использовано в прицельных устройствах самолетов-перехватчиков, ведущих атаку воздушных целей в условиях ближнего воздушного боя.
Известен самолетный прицел, содержащий бортовую радиолокационную станцию (БРЛС), включающую зеркальную антенну с датчиками угла поворота зеркала по осям азимута, наклона и крена и блоком управления антенной, выход антенны через первый вход антенного переключателя соединен со входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, а также цифровую вычислительную машину (ЦВМ), вход которой соединен с выходом приемного устройства. Прицел также содержит блок связи с ракетами, выход которого соединен с головками самонаведения ракет, и переключатель режимов атаки. (Патент Российской федерации №2265786 по классу F41G 3/22 с приоритетом 24.06.2004 г.).
Недостаток известного устройства при применении в нем импульсно-доплеровской БРЛС - большое время прицеливания, достигающее нескольких секунд, обусловленное отсутствием оперативного наведения зеркала антенны на цель, а также тем, что БЦВМ работает как процессор обработки отраженного сигнала, а формирование прицельной информации и управление БРЛС осуществляется с задержкой. Такое время прицеливания недопустимо при работе прицела в условиях ближнего воздушного боя.
Наиболее близким к изобретению является самолетный прицел, содержащий бортовую радиолокационную станцию, процессор обработки сигналов, индикатор и блок связи с ракетами, переключатель режимов атаки и датчики высоты полета и крена самолета, переключатель смещения зоны обзора, процессор управления прицеливанием, причем бортовая радиолокационная станция состоит из зеркальной антенны с блоком управления антенной, снабженную датчиками углов поворота и угловых скоростей зеркала по осям азимута, наклона и крена, выход которой через первый вход антенного переключателя соединен с входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, вход которого соединен с выходом приемного устройства, выходы блока связи соединены с ракетами, первый вход процессора управления прицеливанием соединен с переключателем режимов атаки, второй вход - с переключателем смещения зоны обзора, третий вход - с датчиками углов поворота и угловых скоростей зеркала антенны, четвертый вход - с информационным выходом блока связи с ракетами, пятый вход - с датчиками высоты и крена самолета, выходы процессора управления прицеливанием соответственно подключены: первый - ко входу индикатора, второй - ко входу блока связи с ракетами, третий - ко входу блока управления антенной, а четвертый - к управляющему входу синхронизатора, при этом процессоры связаны между собой линией связи.(Гуськов Ю.Н., Бушуев С.Н., Корнев Г.И., Самолетный прицел. Патент РФ на изобретение №2379613, опубл. 20.01. 2010).
Недостатком данного прицела является недостаточное время прицеливания, обусловленное тем, что указывается только сектор нахождения цели, при этом требуется дополнительное время в пределах зоны обзора сектора для определения положения цели.
Время прицеливания является наиболее значимым фактором при ведении ближнего воздушного боя, которое можно уменьшить на основе целеуказания цели по угловому положению и угловой скорости цели.
Задача изобретения - уменьшение времени прицеливания для самолетной прицельной системы в ближнем воздушном бою.
Решение поставленной задачи достигается тем, что самолетная прицельная система для ближнего воздушного боя содержит, бортовую радиолокационную станцию, процессор обработки сигналов, индикатор и блок связи с ракетами, переключатель режимов атаки и датчики высоты полета и крена самолета, переключатель смещения зоны обзора, процессор управления прицеливанием, причем бортовая радиолокационная станция состоит из зеркальной антенны с блоком управления антенной, снабженную датчиками углов поворота и угловых скоростей зеркала по осям азимута, наклона и крена, выход которой через первый вход антенного переключателя соединен с входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, вход которого соединен с выходом приемного устройства, выходы блока связи соединены с ракетами, первый вход процессора управления прицеливанием соединен с переключателем режимов атаки, второй вход - с переключателем смещения зоны обзора, третий вход - с датчиками углов поворота и угловых скоростей зеркала антенны, четвертый вход - с информационным выходом блока связи с ракетами, пятый вход - с датчиками высоты и крена самолета, выходы процессора управления прицеливанием соответственно подключены: первый - ко входу индикатора, второй - ко входу блока связи с ракетами, третий - ко входу блока управления антенной, а четвертый - к управляющему входу синхронизатора, при этом процессоры связаны между собой линией связи, дополнительно введены блок целеуказаний по угловому положению цели и блок целеуказаний по угловой скорости движения цели, первый вход блока целеуказаний по угловому положению цели связан с выходом нашлемной системы индикации летчика, второй вход - с выходом датчиков углов поворота антенны, а первый, второй и третий выходы соответственно - с шестым, седьмым и восьмым входами процессора управления прицеливанием, первый, второй и третий входы блока целеуказаний по угловой скорости соединены соответственно с третьим выходом блока целеуказаний по угловому положению цели, с выходами датчика системы нашлемного целеуказания цели и датчика угловой скорости антенны, а первый, второй и третьи выходы соответственно - с девятым, десятым и одиннадцатыми входами процессора, блок целеуказаний по угловому положению цели содержит n-пороговых устройств, задатчик сигналов, элемент ИЛИ, вычитающее устройство, первый и второй диоды, при этом первым и вторыми входами блока целеуказаний по угловому положению цели являются соответственно первые входы n-пороговых устройств и второй вход вычитающего устройства, первый вход которого соединен с выходом элемента ИЛИ, входы которого соединены с выходами n-пороговых устройств, вторые входы которых соединены с выходами задатчиков сигналов, выход вычитающего устройства соединен с входами первого и второго датчиков, которые включены соответственно по схеме прямого и обратно включения, выход первого, второго датчиков, выход вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловому положению цели, блок целеуказаний по угловой скорости движения цели содержит первый элемент НЕ, первый и второй ключи, n-пороговых устройств, задатчик сигналов, дифференцирующую цепь, первый и второй элементы ИЛИ, сдвиговый регистр, генератор сигналов, n-элементов И, n-вторых элементов НЕ, n-счетчиков, вычитающее устройство, первый и второй диоды, причем первым, вторым и третьими входами блока целеуказаний по угловой скорости движения цели являются входы n-первых элементов НЕ, первые входы первых и вторых ключей, выход первого элемента НЕ соединен со вторыми входами первого и второго ключей, выходы которых соединены соответственно с первыми входами n-пороговых устройств, и первым входом делителя, вторые входы n-пороговых устройств соединены с выходами задатчика сигналов, один из выходов которого соединен с входом дифференцирующей цепи, выход которой соединен со вторыми входами сдвигового регистра и n-счетчиков, выходы n-пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра, третий вход которого соединен с выходом генератора сигналов, выход которого, кроме того, соединен со вторыми входами n-элементов И, первые входы которых соединены с выходами сдвигового регистра за исключением n-выхода, вторые входы n-элементов И соединены с выходами вторых n-элементов НЕ, второй и последующие выходы сдвигового регистра соединены со входами n-вторых элементов НЕ, выходы n-элементов И соединены с первыми входами n-счетчиков, выходы которых соединены с входами второго элемента ИЛИ, выход которого соединен со вторым входом вычитающего устройства, выход которого соединен с входами первого и второго диодов, которые включены соответственно по схеме прямого и обратного включения, выходы первого, второго диодов и вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловой скорости движения цели.
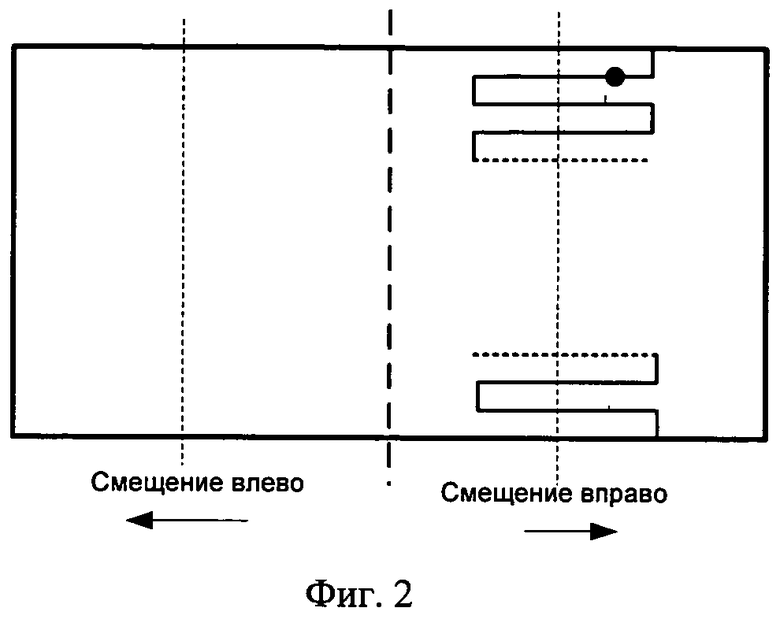
На фиг.1 представлена схема самолетного прицела, на фиг.2 - вид смещенной зоны обзора, на фиг.3 - структурная схема блока целеуказаний по угловым положениям цели, на фиг.4 - структурная схема блока целеуказаний по угловой скорости движения цели.
В состав прицела (фиг.1) входят: импульсно-доплеровская БРЛС 1, включающая антенну 2 с датчиками 3 углов поворота и угловой скорости зеркала антенны по осям азимута, наклона и крена, антенный переключатель 4, приемное и передающее устройства 5 и 6, синхронизатор 7, а также связанные линией связи процессор сигналов 8 и процессор управления прицеливанием 9, индикатор 10, переключатель режимов атаки 11 - в переднюю или в заднюю полусферу, блок связи с ракетами 12, ракеты 13, блок управления антенной 14, переключатель смещения зоны обзора 15 и датчики высоты и крена самолета 16, блок 17 целеуказаний по угловому положению цели, блок 18 целеуказаний по угловой скорости движения цели.
Блок 17 целеуказаний по угловому положению цели (фиг.3) содержит n-пороговых устройств 19, задатчик 20 сигналов, элемент ИЛИ 21, вычитающее устройство 22, первый 23 и второй 24 диоды.
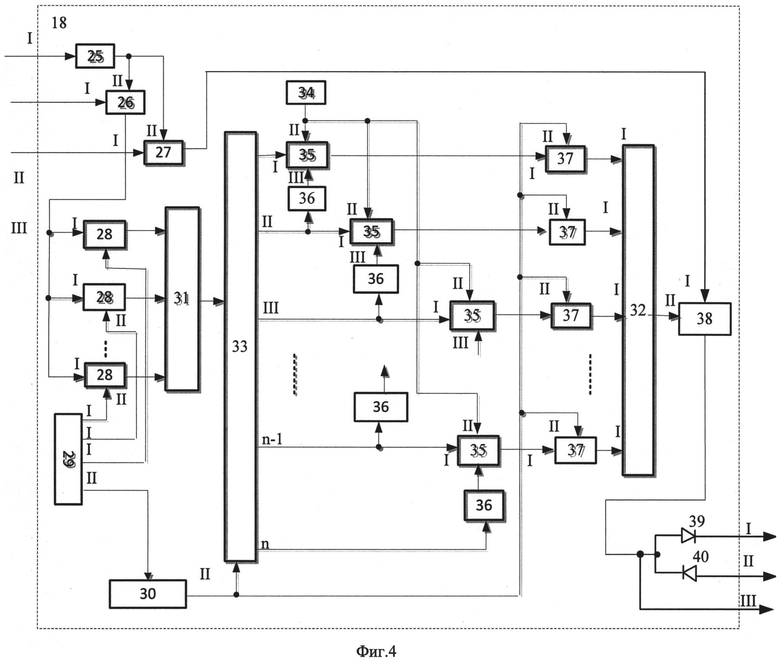
Блок 18 целеуказаний по угловой скорости движения цели (фиг.4) содержит первый 25 элемент НЕ, первый 26 и второй 27 ключи, n-пороговых устройств 28, задатчик 29 сигналов, дифференцирующую цепь 30, первый 31 и второй 32 элементы ИЛИ, сдвиговый регистр 33, генератор 34 сигналов, n-элементов И 35, n-вторых 36 элементов НЕ, n-счетчиков 37, вычитающее устройство 38, первый 39 и второй 40 диоды.
Антенна 2 БРЛС 1 через первый вход антенного переключателя 4, приемник 5 и процессор сигналов 8 соединена с процессором управления прицеливанием 9 посредством линии связи. Вход индикатора 10 соединен с первым выходом процессора управления прицеливанием 9, второй выход которого подключен ко входу блока связи с ракетами 12, третий - ко входу блока управления антенной 14, а четвертый - к управляющему входу синхронизатора 7. Входы процессора 9 соответственно соединены: первый вход - с переключателем режимов атаки 11, второй вход - с переключателем смещения зоны обзора 15, третий вход - с датчиками угла поворота и угловой скорости зеркала антенны 3, четвертый вход - с информационным выходом блока связи с ракетами 12, а пятый вход - с выходами датчиков высоты и крена самолета 16. Выходы блока связи с ракетами 12 подключены ко входам ракет 13.
Первый вход блока 17 целеуказаний по угловому положению цели связан с выходом нашлемной системы индикации летчика, второй вход - с выходом датчиков 3 углов поворота антенны, а первый, второй и третий выходы соответственно - с шестым, седьмым и восьмым входами процессора 9 управления прицеливанием.
При этом первым и вторыми входами блока 17 целеуказаний по угловому положению цели являются соответственно первые входы n-пороговых устройств 19 и второй вход вычитающего устройства 22, первый вход которого соединен с выходом элемента ИЛИ 21, входы которого соединены с выходами n-пороговых устройств 19, вторые входы которых соединены с выходами задатчиков 20 сигналов, выход вычитающего устройства 22 соединен с входами первого 23 и второго24 датчиков, которые включены соответственно по схеме прямого и обратного включения, выход первого 23, второго 24 датчиков, выход вычитающего устройства 22 являются соответственно первым, вторым и третьим выходами блока 17 целеуказаний по угловому положению цели.
Первый, второй и третий входы блока 18 целеуказаний по угловой скорости движения цели соединены соответственно с третьим выходом блока 17 целеуказаний по угловому положению цели, с выходами датчика системы нашлемного целеуказания цели и датчика 3 угловой скорости антенны, а первый, второй и третьи выходы соответственно - с девятым, десятым и одиннадцатыми входами процессора 9 управления прицеливанием.
Причем первым, вторым и третьими входами блока 18 целеуказаний по угловой скорости движения цели являются соответственно входы n-первых 25 элементов НЕ, первые входы первых 26 и вторых 27 ключей, выход первого 25 элемента НЕ соединен со вторыми входами первого 26 и второго 27 ключей, выходы которых соединены соответственно с первыми входами n-пороговых устройств 28 и первым входом делителя 38, вторые входы n-пороговых устройств 28 соединены с выходами задатчика 29 сигналов, один из выходов которого соединен с входом дифференцирующей цепи 30, выход которой соединен со вторыми входами сдвигового регистра 33 и n-счетчиков 37, выходы n-пороговых устройств 28 соединены с входами первого 31 элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра 33, третий вход которого соединен с выходом генератора 34 сигналов, выход которого, кроме того, соединен со вторыми входами n-элементов И 35, первые входы которых соединены с выходами сдвигового регистра 33 за исключением n-выхода, вторые входы n-элементов И 35 соединены с выходами вторых 36 n-элементов НЕ, второй и последующие выходы сдвигового регистра соединены со входами n-вторых 36 элементов НЕ, выходы n-элементов И 35 соединены с первыми входами n-счетчиков 37, выходы которых соединены с входами второго 32 элемента ИЛИ, выход которого соединен со вторым входом вычитающего устройства 38, выход которого соединен с входами первого 39 и второго 40 диодов, которые включены соответственно по схеме прямого и обратного включения, выходы первого 39, второго 40 диодов и вычитающего устройства 38 являются соответственно первым, вторым и третьим выходами блока 18 целеуказаний по угловой скорости движения цели.
В качестве нашлемной системы целеуказания, прицеливания и индикации может быть использована система, указанная в патенте №2321813, МПК8 F41G 3/22, опубл. 10.04. 2008 г.
Устройство работает следующим образом.
В процессе ведения ближнего воздушного боя на дальностях от 10 до 15 километров пилот визуально через фонарь кабины обнаруживает цель, определяет ее положение относительно самолета - справа или слева, направление ее полета (сближение или удаление), устанавливает переключатель режимов атаки 11 в соответствующее положение и переключатель 15 в положение «смещение влево» или «смещение вправо». Сигнал с выхода переключателя режимов атаки 11 поступает на первый вход процессора 9, по которому он выбирает частоту повторения БРЛС 1 (высокую или среднюю) и выдает сигналы на управляющий вход синхронизатора 7, по которым он изменяет период повторения импульсов в пачке и их скважность в передающем устройстве 6, обеспечивая ведение ближнего воздушного боя.
Сигнал с выхода переключателя 15 подается на второй вход процессора 9, по которому он формирует сигналы управления шириной зоны обзора, устанавливая режим «зона малая», и ее положением в пространстве «слева» или «справа», которые поступают на входы блока управления антенной 14. В соответствии с этими сигналами антенна 2, смещаясь относительно нулевого положения (фиг.2), начинает производить построчный обзор передней полусферы малой зоной обзора, обеспечив оперативное наведение зеркала антенны на цель.
В процессе обзора сигнал с выхода передающего устройства 6 через антенный переключатель 4 поступает на вход антенны 2 и излучается в пространство. Закрытое на время импульсной посылки приемное устройство 5 открывается, и процессор 8 начинает производить обработку принимаемого сигнала, используя алгоритм быстрого преобразования Фурье.
Согласно работе В.В. Васина и др. Авиационная радиолокация. Издание ВВИА им. Н.Е. Жуковского, 1964 г. стр.529, для вычисления данных, необходимых для стрельбы самолетного комплекса перехвата, на вход вычислительного устройства (процессора управления прицеливанием) необходимо подать информацию о режиме атаки, виде оружия, дальности до цели, углах поворота и угловых скоростях зеркала антенны, а также высоте полета и угле крена самолета.
До момента обнаружения цели, на втором, четвертом и пятом входах процессора 9 уже имеется информация о характере атаки (в переднюю или заднюю полусферу) с выхода переключателя режимов атаки 15, информация о наличии и типе ракет 14 с информационного выхода блока связи с ракетами 12.
При обнаружении цели процессор сигналов 8 по линии связи выдает на вход процессора управления прицеливанием 9 информацию о дальности до цели. В момент получения сигнала о наличии цели процессор 9 фиксирует значения углов поворота и угловых скоростей зеркала антенны 2 с выходов датчиков углов поворота и угловых скоростей 3, а также информацию о высоте полета и углах крена с выхода датчиков высоты и крена 16 самолета. Имея полный набор исходных данных, процессор 9 производит формирование прицельной информации, которая поступает на вход блока связи с ракетами 12 и далее на ракеты 13, подготавливая их к пуску с минимальной задержкой относительно времени формирования отметки цели.
Целеуказания по угловому положению цели в ближнем воздушном бою самолетной прицельной системы от нашлемной системы летчика происходит следующим образом.
С выхода датчиков нашлемной системы индикации летчика сигнал, соответствующий угловому положению цели, поступает на первый вход блока 17 целеуказаний, на второй вход которого поступает сигнал с выхода датчиков 3 углов поворота антенны, соответствующий угловому положению антенны.
При этом сигналы с первого и второго входов блока 17 целеуказаний по угловому положению цели поступают соответственно на первые входы n-пороговых устройств 19 и второй вход вычитающего устройства 22.
Пороговые устройства 19 обеспечивают определение текущего значения углового положения цели за счет сравнения сигналов с нашлемной системы целеуказаний сигналов с заданными значениями.
В момент превышения текущего значения сигнала над одним из заданных, которые поступают на вторые входы n-пороговых устройств с выходов задатчика 20 сигналов, происходит срабатывание одного из пороговых устройств, с выхода которого сигнал через элемент ИЛИ 21 поступает на первый вход вычитающего устройства 22.
Вычитающее устройство 22 определяет величину рассогласования между угловым положением цели и угловым положением антенны БРЛС.
С выхода вычитающего устройства 22 сигнал поступает на восьмой вход блока 9, который выдает сигнал с четвертого выхода блока 9 на вход блока 14 управления антенной, обеспечивая при этом поворот антенны БРЛС в направлении углового положения цели.
Кроме того, блок 17 целеуказаний по угловому положению цели определяет направления рассогласования между угловым положением цели и антенны БРЛС. Это происходит следующим образом.
Направление рассогласования между угловым положением цели и антенны определяется полярностью сигнала на выходе вычитающего устройства 22.
Сигнал с выхода вычитающего устройства 22 поступает на входы первого 23 и второго 24 датчиков, которые включены соответственно по схеме прямого и обратного включения.
При этом в зависимости от полярности сигнала на выходе вычитающего устройства 22 через первый 23 или второй 24 датчики сигнал поступает соответственно на шестой или седьмой входы процессора 9 управления прицеливанием.
Процессор 9 управления прицеливанием на основе данной информации обеспечивает управление по направлению угловым положением антенны БРЛС.
Целеуказания по угловой скорости цели самолетной прицельной системы в ближнем воздушном бою осуществляются следующим образом.
Сигналы выходов с третьего блока 17 целеуказаний по угловому положению цели, датчика системы нашлемного целеуказания цели и датчика 3 угловой скорости антенны, поступают на первый, второй и третий входы блока 18 целеуказаний по угловой скорости движения цели и соответственно на входы n-первых 25 элементов НЕ, первые входы первых 26 и вторых 27 ключей.
В случае, если сигнал рассогласования между угловым положением цели и антенны равен нулю, то сигнал с выхода первого 25 элемента НЕ поступает на вторые входы первого 26 и второго 27 ключей.
Сигнал, соответствующий угловому положению цели, с выхода первого 26 ключа поступает соответственно на первые входы n-пороговых устройств 28.
На вторые входы n-пороговых устройств 28 поступают сигналы с выходов задатчика 29 сигналов.
Кроме того, с одного из выходов задатчика 29 сигналов через дифференцирующую цепь 30 сигнал поступает на вторые входы сдвигового регистра 33 и n-счетчиков 37, обеспечивая их «обнуления».
В случае превышения сигнала на одном из первых входов n-пороговых устройств 28 одного из заданных значений, которые поступают на вторые входы с выходов задатчика сигналов, сигнал с выхода одного из n-пороговых устройств 28 через первый 31 элемент ИЛИ поступает на первый вход сдвигового регистра 33, на третий вход которого поступают сигналы с выхода генератора 34 сигналов.
Сдвиговый регистр 33 обеспечивает анализ временных интервалов между входными сигналами. Это происходит следующим образом.
Сигналы с выходов сдвигового регистра 33, за исключением n-выхода, поступают на первые входы вторых n-элементов И 35, на вторые и третьи входы которых поступают сигналы с выходов вторых 36 n-элементов НЕ и генераторов 34 сигналов. При этом сигналы с выходов n-элементов И 35 поступают на первые входы n-счетчиков 37, которые осуществляют последовательный подсчет временных интервалов между входными сигналами.
В момент поступления сигналов со вторых и последующих выходов сдвигового регистра на входы n-вторых 36 элементов НЕ происходит последовательное снятие сигналов со вторых входов n-элементов И 35.
При этом сигналы с выходов n-счетчиков 37 через один из входов второго 32 элемента ИЛИ поступают на второй вход вычитающего устройства 38, с выхода которого через третий выход блока 18 целеуказаний по угловой скорости движения цели поступает на одиннадцатый вход процессора 9 управления прицеливанием.
Процессор 9 управления прицеливанием обеспечивает выдачу сигнала с четвертого выхода на вход блока 14 управления антенной, при этом обеспечивается ее вращение со скоростью, соответствующей скорости перемещения цели.
Для определения направления скорости вращения антенны (увеличения или уменьшения) сигнал с выхода вычитающего устройства 38 поступает на входы первого 39 и второго 40 диодов, которые включены соответственно по схеме прямого и обратного включения.
В зависимости от полярности сигнала на выходе вычитающего устройства 38, с выхода первого 39, или второго 40 диодов сигнал поступает соответственно на девятый или десятый входы процессора 9 управления прицеливанием, обеспечивая уменьшение или увеличение скорости вращения.
Блоки целеуказаний по угловому положению цели и угловой скорости движения цели позволяют осуществить оперативное наведение зеркала антенны на маневрирующую цель, уменьшив тем самым время прицеливания, что особенно актуально при ведении ближнего воздушного боя.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539842C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539833C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2007 |
|
RU2344969C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539825C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ | 2008 |
|
RU2360204C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2006 |
|
RU2312296C1 |
| СПОСОБ САМОНАВЕДЕНИЯ МАЛОРАЗМЕРНЫХ РАКЕТ НА ЦЕЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539823C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539803C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539841C1 |

Изобретение относится к средствам прицеливания на самолетах. Изобретение содержит бортовую радиолокационную станцию, процессор обработки сигналов, индикатор и блок связи с ракетами, переключатель режимов атаки, датчики высоты полета и крена самолета, переключатель смещения зоны обзора, процессор управления прицеливанием, блок целеуказаний по угловому положению и блок целеуказаний по угловой скорости. Блок целеуказаний по угловому положению цели содержит n-пороговых устройств, задатчик сигналов, элемент ИЛИ, вычитающее устройство, первый и второй диоды. Причем первым и вторым входами блока целеуказаний являются соответственно первые входы n-пороговых устройств и второй вход вычитающего устройства. Выходы первого и второго диодов и вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловому положению цели. Блок целеуказаний по угловой скорости движения цели содержит первый элемент НЕ, сдвиговый регистр, генератор сигналов, n-элементов И, n-вторых элементов НЕ, n-счетчиков, вычитающее устройство, первый и второй диоды. Причем первым, вторым и третьим входами блока целеуказаний по угловой скорости движения цели являются вход первого элемента НЕ и первые входы первых и вторых ключей. Выходы первого, второго и вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний. Технический результат изобретения заключается в уменьшении времени прицеливания. 3 ил.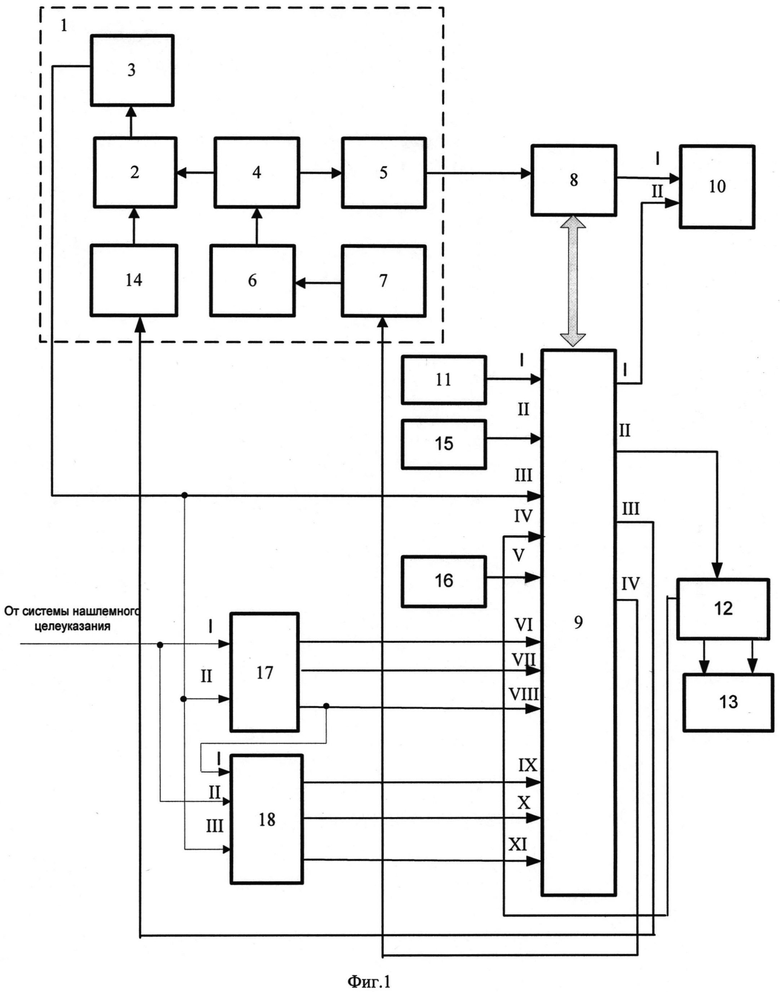
Самолетная прицельная система для ближнего воздушного боя, содержащая бортовую радиолокационную станцию, процессор обработки сигналов, индикатор и блок связи с ракетами, переключатель режимов атаки и датчики высоты полета и крена самолета, переключатель смещения зоны обзора, процессор управления прицеливанием, при этом бортовая радиолокационная станция состоит из зеркальной антенны с блоком управления антенной, снабженную датчиками углов поворота и угловых скоростей зеркала по осям азимута, наклона и крена, выход которой через первый вход антенного переключателя соединен с входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, вход которого соединен с выходом приемного устройства, выходы блок связи соединены с ракетами, первый вход процессора управления прицеливанием соединен с переключателем режимов атаки, второй вход - с переключателем смещения зоны обзора, третий вход - с датчиками углов поворота и угловых скоростей зеркала антенны, четвертый вход - с информационным выходом блока связи с ракетами, пятый вход - с датчиками высоты и крена самолета, выходы процессора управления прицеливанием соответственно подключены: первый - ко входу индикатора, второй - ко входу блока связи с ракетами, третий - ко входу блока управления антенной, а четвертый - к управляющему входу синхронизатора, при этом процессоры связаны между собой линией связи, отличающаяся тем, что дополнительно введен блок целеуказаний по угловому положению цели и блок целеуказаний по угловой скорости движения цели, первый вход блока целеуказаний по угловому положению цели связан с выходом нашлемной системы индикации летчика, второй вход - с выходом датчиков углов поворота антенны, а первый, второй и третий выходы соответственно - с шестым, седьмым и восьмым входами процессора управления прицеливанием, первый, второй и третий входы блока целеуказаний по угловой скорости, соединены соответственно с третьим выходом блока целеуказаний по угловому положению цели, с выходами датчика системы нашлемного целеуказания цели и датчика угловой скорости антенны, а первый, второй и третьи выходы соответственно - с девятым, десятым и одиннадцатыми входами процессора, блок целеуказаний по угловому положению цели содержит n-пороговых устройств, задатчик сигналов, элемент ИЛИ, вычитающее устройство, первый и второй диоды, при этом первым и вторыми входами блока целеуказаний по угловому положению цели являются соответственно первые входы n-пороговых устройств и второй вход вычитающего устройства, первый вход которого соединен с выходом элемента ИЛИ, входы которого соединены с выходами n-пороговых устройств, вторые входы которых соединены с выходами задатчиков сигналов, выход вычитающего устройства соединен с входами первого и второго диодов, которые включены соответственно по схеме прямого и обратного включения, выход первого, второго диодов, выход вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловому положению цели, блок целеуказаний по угловой скорости движения цели содержит первый элемент НЕ, первый и второй ключи, n-пороговых устройств, задатчик сигналов, дифференцирующую цепь, первый и второй элементы ИЛИ, сдвиговый регистр, генератор сигналов, n-элементов И, n-вторых элементов НЕ, n-счетчиков, вычитающее устройство, первый и второй диоды, причем первым, вторым и третьими входами блока целеуказаний по угловой скорости движения цели являются вход первого элемента НЕ, первые входы первых и вторых ключей, выход первого элемента НЕ соединен со вторыми входами первого и второго ключей, выходы которых соединены соответственно с первыми входами n-пороговых устройств и первым входом вычитающего устройства, вторые входы n-пороговых устройств соединены с выходами задатчика сигналов, один из выходов которого соединен с входом дифференцирующей цепи, выход которой соединен со вторыми входами сдвигового регистра и n-счетчиков, выходы n-пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра, третий вход которого соединен с выходом генератора сигналов, выход которого, кроме того, соединен со вторыми входами n-элементов И, первые входы которых соединены с выходами сдвигового регистра за исключением n-выхода, вторые входы n-элементов И соединены с выходами вторых n-элементов НЕ, второй и последующие выходы сдвигового регистра соединены со входами n-вторых элементов НЕ, выходы n-элементов И соединены с первыми входами n-счетчиков, выходы которых соединены с входами второго элемента ИЛИ, выход которого соединен со вторым входом вычитающего устройства, выход которого соединен с входами первого и второго диодов, которые включены соответственно по схеме прямого и обратного включения, выходы первого, второго диодов и вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловой скорости движения цели.
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2467277C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 2006 |
|
RU2312296C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158407C1 |
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| US 5331881 A, 26.07.1994 | |||
| EP 1218685 A1, 03.07.2002 | |||

