Изобретение относится к области измерения механических колебаний по величине сигнала отражения и может быть использовано для бесконтактного измерения и непрерывного контроля параметров колебаний турбинных и компрессорных лопаток в эксплуатационных условиях.
Известен способ определения параметров колебаний лопаток турбомашин, основанный на бесконтактном съеме информации о колебаниях вращающихся лопаток, заключающийся в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделении частоты Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получение автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями (патент РФ №2324907, G01H 11/00, G01M 13/00, бюл. №14, 2008 г.).
Известно устройство для определения амплитуд колебаний лопаток турбомашин, содержащее последовательно соединенные радиолокационное устройство, выполняющее роль датчика, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств (патент РФ №2324907, G01H 11/00, G01M 13/00, бюл. №14, 2008 г.).
Недостатком известного способа и устройства является отсутствие информации о режимах работы турбомашины в момент определения параметров колебаний лопаток турбомашин.
Техническим результатом изобретения является повышение информативности за счет определения режима работы турбомашины в момент измерения параметров колебаний лопаток турбомашин.
В способе определения параметров колебаний лопаток турбомашин, заключающемся в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделении частот Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получении автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями, дополнительно определяют текущие значения скорости вращения лопаток турбомашины, режим работы турбомашины «стабильный», при условии постоянства скорости вращения турбомашины, режим работы турбомашины «нестабильный», при условии изменения частоты вращения, определяют направление изменения частоты вращения лопаток турбомашины в сторону увеличения в случае, если каждое последующее значение частоты вращения лопаток турбомашины больше предыдущего, определяют направление изменения частоты вращения лопаток турбомашины в сторону уменьшения, в случае, если каждое последующее значение частоты вращения лопаток турбомашины меньше предыдущего.
Заявляемый способ реализуется в устройстве, содержащем последовательно соединенные радиолокационное устройство, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств, в которое дополнительно введены блок определения режимов работы турбомашины, индикатор скорости вращения лопаток турбомашины, индикатор режимов работы, причем выход радиолокационного устройства соединен с входом блока определения режимов работы турбомашины, первая и вторая группа выходов которого соединена соответственно с входами индикатора скорости вращения лопаток турбомашины и индикатора режимов работы турбомашины.
Блок определения режимов работы турбомашины содержит генератор импульсов, сдвиговый регистр, первый, второй, третий элементы И, первый, второй и третий элементы НЕ, первый, второй и третий счетчик, элемент ИЛИ, дифференцирующую цепь, первое и второе вычитающие устройства, четвертый и пятый элементы НЕ, первый, второй, третий и четвертые диоды, причем входом блока определения скорости вращения лопаток турбомашины является первый вход сдвигового регистра, второй и третий входы которого соединены соответственно с выходом генератора импульсов и выходом дифференцирующей цепи, вход которой соединен с выходом элемента ИЛИ, первый и второй входы которого соединены соответственно с выходом источника питания и четвертым выходом сдвигового регистра, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно со вторым входом первого элемента И, со входом первого элемента НЕ и одновременно со вторым входом второго элемента И, с входом второго элемента НЕ и одновременно со вторым входом третьего элемента И, входом третьего элемента НЕ, выходы первого, второго, третьего элементов НЕ соединены соответственно с третьими входами первого, второго и третьего элементов И, выходы которых соединены соответственно с первыми входами первого, второго и третьего счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выходы первого и второго счетчиков соединены с первым и вторыми входами первого вычитающего устройства, выходы второго и третьего счетчиков соединены соответственно с первым и вторым входами второго вычитающего устройства, выход первого вычитающего устройства соединен с входами первого элемента НЕ, входами первого и второго диодов, выход второго вычитающего устройства соединен с входом второго элемента НЕ, входами третьего и четвертого диодов, выходы первого, второго и третьего счетчиков являются первыми выходами определения режимов работы турбомашины, выходы первого и второго элементов НЕ, выходы первого, второго, третьего и четвертого диодов являются вторыми выходами блока определения режимов работы турбомашины.
На чертеже приведена функциональная схема устройства определения параметров колебаний лопаток турбомашин.
Устройство для определения параметров колебаний лопаток турбомашин содержит последовательно соединенные радиолокационное устройство 1, выполняющее роль датчика, блок 2 выделения частот Доплера, блок 3 получения автокорреляционных функций, блок 4 пороговых устройств, блок 5 определения режимов работы турбомашины, индикатор 6 скорости вращения лопаток турбомашины, индикатор 7 режимов работы турбомашины.
Блок 5 определения режимов работы турбомашины содержит генератор 8 импульсов, сдвиговой 9 регистр, первый 10, второй 11, третий 12 элементы И, первый 13, второй 14 и третий 15 элементы НЕ, первый 16, второй 17 и третий 18 счетчик, элемент ИЛИ 19, дифференцирующую цепь 20, первое 21 и второе 22 вычитающие устройства, четвертый 23 и пятый 24 элементы НЕ, первый 25, второй 26, третий 27и четвертый 28 диоды
Принцип работы устройства заключается в следующем.
Радиолокационное устройство 1, установленное под острым углом к перпендикуляру траектории вращения кромок лопаток, осуществляет излучение и прием радиолокационного сигнала. Частоты Доплера сигнала, отраженного от вращающихся лопаток турбомашины, выделяются в блоке 2 выделения частот Доплера и поступают на входы блока 3 получения автокорреляционных функций. На выходах данного блока 3 формируются автокорреляционные функции сигналов, отряженных от каждой i-й лопатки. Амплитуда автокорреляционных функций зависит от амплитуды колебаний каждой i-й лопатки.
В блоке 4 пороговых устройств осуществляется сравнение значений амплитуд автокорреляционных функций с пороговыми значениями. При превышении одного из пороговых значений формируется сигнал о превышении амплитуды колебаний i-й лопатки заданного значения.
Одновременно с выхода радиолокационного устройства 1 отраженные от вращающихся лопаток турбомашины сигналы поступают на вход блока 5 определения режимов работы турбомашины и соответственно на первый вход сдвигового регистра 9.
В момент включения источника питания происходит обнуление логических элементов по цепи источник питания, первый вход элемента ИЛИ 19, дифференцирующая цепь 20, третий вход сдвигового регистра 9, вторые входы первого 16, второго 17 и третьего 18 счетчиков.
Сигналы с первого, второго и третьего выходов сдвигового регистра 9 последовательно поступают на вторые входы первого 10, второго 11 и третьего 12 элементов И, на первые входы которых поступают импульсы с генератора 8 сигнала.
В момент поступления сигнала с первого выхода сдвигового регистра 9 на второй вход первого 10 элемента И через его первый вход обеспечивается поступление импульсов от генератора 8 сигналов на первый вход первого 16 счетчика.
В момент поступления сигнала со второго выхода сдвигового регистра 9 на вход первого 13 элемента НЕ прекращается поступление импульсов с выхода генератора 8 сигналов на первый вход первого 16 счетчика за счет снятия сигнала с выхода первого 13 элемента НЕ и соответственно с выхода первого 10 элемента И.
Таким образом, на выходе первого 16 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал со второго выхода сдвигового регистра 9 поступает на второй вход второго 11 элемента И, с выхода которого поступает на первый вход второго 17 счетчика.
В момент поступления сигнала с третьего выхода сдвигового регистра 9 на вход второго 14 элемента НЕ прекращается поступление импульсов с выхода генератора 8 сигналов на первый вход второго 17 счетчика за счет снятия сигнала с выхода второго 14 элемента НЕ и соответственно с третьего входа второго 11 элемента И.
Таким образом, на выходе второго 17 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал с третьего выхода сдвигового регистра 9 поступает на второй вход третьего 12 элемента И, с выхода которого поступает на первый вход третьего 18 счетчика.
В момент поступления сигнала с четвертого выхода сдвигового регистра 9 на вход третьего 15 элемента НЕ прекращается поступление импульсов с выхода генератора 8 сигналов на первый вход третьего 18 счетчика за счет снятия сигнала с выхода второго 15 элемента НЕ и соответственно с третьего входа третьего 12 элемента И.
Таким образом, на выходе третьего 17 счетчика сформирован сигнал, пропорциональный скорости вращения лопаток турбомашины в текущий момент времени.
Одновременно сигнал с четвертого выхода сдвигового регистра 9 через элемент ИЛИ 19 поступает на вход дифференцирующей цепи 20, с выхода которой поступает сигнал обнуления на третий вход сдвигового регистра 9 и вторые входы первого 16, второго 17 и третьего 18 счетчиков.
Затем обеспечивается следующий цикл измерений за счет функционирования сдвигового регистра 9.
Сигналы с выходов счетчиков (16, 17, 18) поступают на входы индикатора 6 скорости вращения лопаток турбомашин.
Сигналы с выходов счетчиков (16, 17) поступают на первый и второй входы первого 21 вычитающего устройства.
Сигналы с выходов счетчиков (17, 18) поступают на первый и второй входы второго 22 вычитающего устройства.
В случае, если частота вращения лопаток турбомашины не изменяется на выходах первого 21 и второго 22 вычитающих устройств, сигнал отсутствует, соответственно отсутствует сигнал на входах четвертого 23 и пятого 24 элементов НЕ, с выходов которых поступает на входы индикатора 7 режимов работы турбомашины, высвечивая стабильный режим работы турбомашины.
В случае, если частота вращения лопаток турбомашины изменяется, сигнал присутствует на выходах первого 21 и второго 22 вычитающих устройств, соответственно присутствуют сигналы на входах четвертого 23 и пятого 24 элементов НЕ, с выходов которых сигналы снимаются с входов индикатора 7 режимов работы турбомашины, высвечивая при этом нестабильный режим работы турбомашины.
В случае, если частота вращения лопаток турбомашины изменяется в сторону увеличения, то происходит срабатывание второго 26 и четвертого 28 диодов, которые включены по схеме обратного включения, и сигналы с их выходов поступают на вход индикатора 7 режимов работы турбомашины, сигнализируя об увеличение частоты вращения лопаток турбомашины.
В случае, если частота вращения лопаток турбомашины изменяется в сторону уменьшения, то происходит срабатывание первого 25 и третьего 27 диодов, которые включены по схеме прямого включения, и сигналы с их выходов поступают на вход индикатора 7 режимов работы турбомашины, сигнализируя об уменьшение частоты вращения лопаток турбомашины.
Таким образом, наряду с определением параметров колебаний лопаток турбомашин определяются режим работы турбомашин (стабильный, нестабильный), а также направление изменение частоты вращения лопаток турбомашины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2484439C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА СТВОЛОВ МНОГОСТВОЛЬНЫХ ПУШЕК АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494369C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА КАНАЛА СТВОЛА АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2012 |
|
RU2494368C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА РОБОТИЗИРОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2545158C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484498C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2483320C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2499218C1 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА БЕСПИЛОТНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2536337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ БОЕПРИПАСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2519617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ БОЕПРИПАСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2519611C1 |
Группа изобретений относится к области измерения параметров механических колебаний. Способ определения параметров колебаний лопаток турбомашин заключается в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделении частот Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получении автокорреляционных функций сигналов для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки, определении текущих значений скорости вращения лопаток турбомашины, определении режима работы турбомашины «стабильный» при условии постоянства скорости вращения турбомашины, определении режима работы турбомашины «нестабильный» при условии изменения частоты вращения, определении направления изменения частоты вращения лопаток турбомашины в сторону увеличения, определении направления изменения частоты вращения лопаток турбомашины в сторону уменьшения. Устройство для определения параметров колебаний лопаток турбомашин содержит последовательно соединенные радиолокационное устройство, выполняющее роль датчика, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств, отличающееся тем, что содержит блок определения режимов работы турбомашины, индикатор скорости вращения лопаток турбомашины, индикатор режимов работы, причем выход радиолокационного устройства соединен с входом блока определения режимов работы турбомашины, первая и вторая группа выходов которого соединена, соответственно, со входами индикатора скорости вращения лопаток турбомашины и индикатора режимов работы турбомашины. Техническим результатом изобретения является повышения информативности измерений. 2 н. и 1 з.п. ф-лы, 1 ил.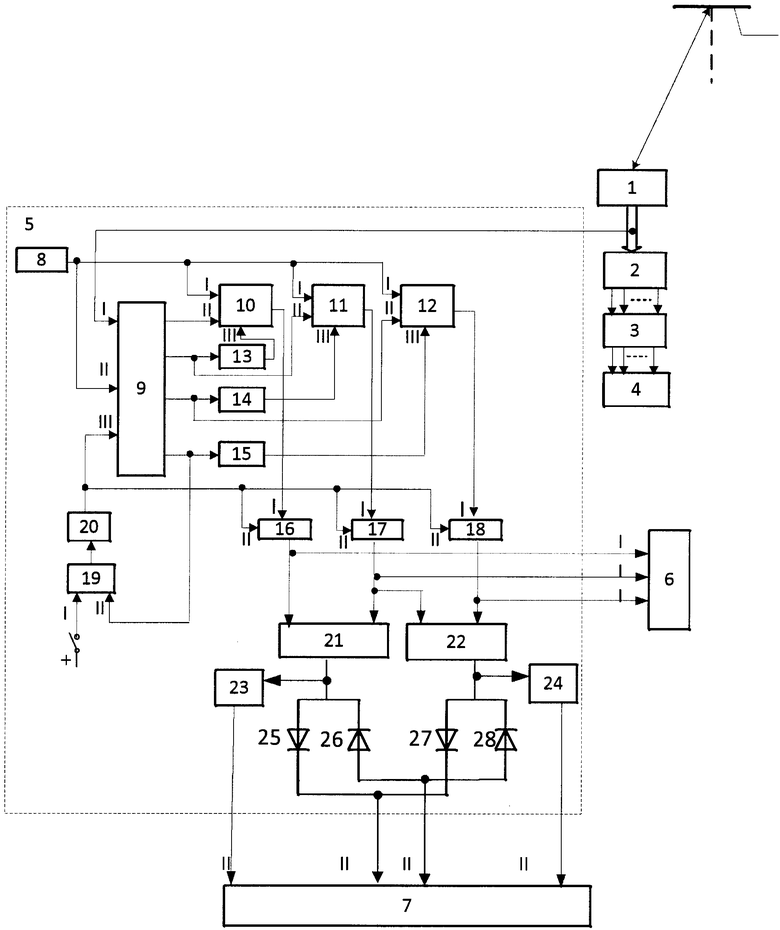
1. Способ определения параметров колебаний лопаток турбомашин, заключающийся в установке радиолокационного устройства на базовом расстоянии от турбомашины под острым углом к перпендикуляру плоскости вращения лопаток, выделении частот Доплера сигнала, отраженного от движущихся лопаток турбомашины, выделении частоты Доплера сигнала от каждой движущейся лопатки, получении автокорреляционных функций сигналов, полученных для каждой i-й лопатки, определении амплитуды колебаний каждой i-й лопатки на основе сравнения значений автокорреляционных функций с пороговыми значениями, отличающийся тем, что определяют текущие значения скорости вращения лопаток турбомашины, определяют режим работы турбомашины «стабильный», при условии постоянства скорости вращения турбомашины, определяют режим работы турбомашины «нестабильный», при условии изменения частоты вращения, определяют направление изменения частоты вращения лопаток турбомашины в сторону увеличения, в случае, если каждое последующее значение частоты вращения лопаток турбомашины больше предыдущего, определяют направление изменения частоты вращения лопаток турбомашины в сторону уменьшения, в случае, если каждое последующее значение частоты вращения лопаток турбомашины меньше предыдущего.
2. Устройство для определения параметров колебаний лопаток турбомашин, содержащее последовательно соединенные радиолокационное устройство, выполняющее роль датчика, блок выделения частот Доплера, блок получения автокорреляционных функций и блок пороговых устройств, отличающееся тем, что содержит блок определения режимов работы турбомашины, индикатор скорости вращения лопаток турбомашины, индикатор режимов работы, причем выход радиолокационного устройства соединен с входом блока определения режимов работы турбомашины, первая и вторая группа выходов которого соединена соответственно со входами индикатора скорости вращения лопаток турбомашины и индикатора режимов работы турбомашины.
3. Устройство для определения параметров колебаний лопаток турбомашины по п.2, отличающееся тем, что блок определения режимов работы турбомашины содержит генератор импульсов, сдвиговый регистр, первый, второй, третий элементы И, первый, второй и третий элементы НЕ, первый, второй и третий счетчик, элемент ИЛИ, дифференцирующую цепь, первое и второе вычитающие устройства, первый, второй, третий и четвертые диоды, причем входом блока определения скорости вращения лопаток турбомашины является первый вход сдвигового регистра, второй и третий входы которого соединены соответственно с выходом генератора импульсов и выходом дифференцирующей цепи, вход которой соединен с выходом элемента ИЛИ, первый и второй входы которого соединены соответственно с выходом источника питания и четвертым выходом сдвигового регистра, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно со вторым входом первого элемента И, со входом первого элемента НЕ и одновременно со вторым входом второго элемента И, с входом второго элемента НЕ и одновременно со вторым входом третьего элемента И, входом третьего элемента НЕ, выходы первого, второго, третьего элементов НЕ соединены соответственно с третьими входами первого, второго и третьего элементов И, выходы которых соединены соответственно с первыми входами первого, второго и третьего счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выходы первого и второго счетчиков соединены с первым и вторыми входами первого вычитающего устройства, выходы второго и третьего счетчиков соединены соответственно с первым и вторым входами второго вычитающего устройства, выход первого вычитающего устройства соединен с входами четвертого элемента НЕ, входами первого и второго диодов, выход второго вычитающего устройства соединен с входом пятого элемента НЕ, входами третьего и четвертого диодов, выходы первого, второго и третьего счетчиков являются первыми выходами определения режимов работы турбомашины, выходы четвертого и пятого элементов НЕ, выходы первого, второго, третьего и четвертого диодов являются вторыми выходами блока определения режимов работы турбомашины.
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324907C1 |
| СПОСОБ И УСТРОЙСТВО ОПЕРАТИВНОЙ ДИАГНОСТИКИ МЕХАНИЗМА | 2004 |
|
RU2267094C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2426974C2 |
| US 7083384 В2, 01.08.2006 | |||
| US 4422333 А1, 27.12.1983 | |||
| WO 1995035484 A1, 28.12.1995 | |||
| DE 10359930 A1, 05.08.2004. | |||

