Изобретения относятся к авиационной технике, а именно к способам и техническим средствам для профессиональной подготовки летного состава, и могут быть использованы при обучении и подготовке летного состава к выполнению маневров при пилотаже и решении боевых задач.
Современный уровень авиационной техники характеризуется чрезвычайной сложностью полета, но, несмотря на высокую степень автоматизации, роль пилота в процессе управления самолетом остается значительной в связи с усложнением и расширением круга решаемых задач при значительно возросшем объеме и видах информации, которую необходимо обработать пилоту для принятия решения.
Эффективным средством для повышения точности управления и безопасности полета летного состава в реальных условиях является его обучение на комплексах (стендах, тренажерах) полунатурного моделирования движения самолета. На таких стендах с участием пилота проводится исследование характеристик самолета, отрабатывается система управления, формируются рекомендации по выполнению полетов, в том числе в особых случаях (отказы, сложные метеоусловия и т.д.). Очевидно, что, чем достовернее реализовано изображение, тем достовернее получаемый результат и лучше подготовка летного состава к выполнению маневров в реальных условиях полета.
Известные способы моделирования полета летательного аппарата включают формирование виртуального изображения окружающей обстановки с помощью специальных технических средств и имитацию полета летательного аппарата посредством управляющих воздействий пилота.
Наиболее близким по технической сущности к заявленному является способ моделирования динамики полета летательного аппарата, включающий формирование виртуальных трехмерных изображений объектов окружающей обстановки с помощью системы визуализации моделирующего комплекса, снабженного макетом летательного аппарата, и имитацию полета летательного аппарата (RU 2156501 C1, G09B 9/08, опубл. 20.09.2000).
Недостатком прототипа, так же как и других известных способов моделирования динамики полета летательного аппарата является невозможность достижения имитации полета, максимально приближенного к реальному, из-за отсутствия глубины изображения окружающего пространства, а также невозможность совмещения реальных объектов макета летательного аппарата с виртуальным трехмерным изображением объектов окружающего пространства.
Техническим результатом заявленного способа является повышение достоверности отображения полета за счет создания максимально приближенной к реальному восприятию пилотом внешней окружающей обстановки и возникновения ощущения реальности полета, а также повышение эффективности и точности отработки пилотом маневров при пилотировании за счет возможности совмещения реальных объектов макета летательного аппарата с виртуальным трехмерным изображением объектов окружающей обстановки.
Указанный технический результат достигается тем, что в способе моделирования динамики полета летательного аппарата, включающем формирование виртуальных трехмерных изображений объектов окружающей обстановки с помощью системы визуализации моделирующего комплекса, снабженного макетом летательного аппарата, и имитацию полета летательного аппарата, во время имитации полета летательного аппарата совмещают виртуальные трехмерные изображения объектов окружающей обстановки с реальными объектами макета летательного аппарата посредством управляющих воздействий пилота.
При этом для проведения дозаправки во время имитации полета формируют виртуальное изображение самолета-дозаправщика (танкера) с агрегатом заправки, снабженным шлангом с заправочным конусом, а макет летательного аппарата выполняют с приемной заправочной штангой, при этом совмещают сформированное трехмерное виртуальное изображение заправочного конуса с реальной приемной заправочной штангой макета летательного аппарата.
Обеспечение при имитации полета совмещения виртуальных трехмерных изображений объектов окружающей обстановки с реальными объектами макета летательного аппарата посредством управляющих воздействий пилота позволяет повысить точность отработки пилотом любых маневров при пилотировании в любых заданных условиях полета, что соответственно влияет на точность управления и безопасность полета в реальных условиях эксплуатации летательного аппарата.
Для моделирования динамики полета летательного аппарата используют комплексы (авиационные тренажеры), которые содержат примерно одинаковый состав оборудования - макет летательного аппарата с кабиной пилота, интерьер которой соответствует кабине реального самолета, систему визуализации, вычислительный блок с программным комплексом, рабочее место инструктора с пультом управления, модули электропитания.
Наиболее близким по технической сущности к заявленному является моделирующий комплекс (RU 2398286 C1, G09B 9/08, опубл. 27.08.2010), включающий макет летательного аппарата с кабиной пилота, макет кабины пилота, интерьер которой соответствует кабине реального самолета, систему визуализации, вычислительный блок с программным комплексом, рабочее место инструктора с пультом управления, модули электропитания.
Недостатки данного технического решения заключаются в том, что они не позволяют в должной мере проводить обучение и исследование режимов точного пилотирования из-за отсутствия глубины изображения окружающего пространства, а также невозможности совмещения реальных объектов макета летательного аппарата с виртуальными трехмерными изображениями объектов окружающей обстановки.
Техническим результатом заявленного устройства является повышение достоверности отображения полета за счет создания максимально приближенной к реальному восприятию пилотом внешней окружающей обстановки и возникновения ощущения реальности полета, а также повышение эффективности и точности отработки пилотом маневров при пилотировании за счет возможности совмещения реальных объектов макета летательного аппарата с виртуальным изображением трехмерных объектов окружающей обстановки.
Указанный технический результат достигается тем, что в моделирующем комплексе для моделирования полета летательного аппарата, включающем макет летательного аппарата с кабиной пилота, интерьер которой соответствует кабине реального самолета, систему визуализации, вычислительный блок с программным комплексом, рабочее место инструктора с пультом управления, модули электропитания, система визуализации выполнена с возможностью формирования виртуальных трехмерных изображений объектов окружающей обстановки, определения габаритов объектов, расстояния до объектов, скорости их перемещения и совмещения виртуальных трехмерных изображений объектов окружающей обстановки с реальными объектами макета летательного аппарата, при этом система отображения окружающей обстановки включает, по меньшей мере, один стереоскопический проектор, экран для проецирования панорамного изображения трехмерных объектов окружающей обстановки и стереоскопические очки.
При этом система визуализации выполнена с использованием технологии 1 chip DLP или 3 chip DLP.
Экран для панорамного изображения трехмерных объектов окружающей обстановки выполнен с плоской или изогнутой поверхностью.
Для имитации полета строем комплекс дополнительно содержит второй макет летательного аппарата, выполненный аналогично первому.
Стереоскопические очки могут быть выполнены с использованием активной или infitec-технологии.
Система визуализации может содержать два проектора или более.
Моделирующий комплекс может содержать эмиттер для синхронизации изображения трехмерных объектов окружающей обстановки и стереоскопических очков с активной технологией посредством инфракрасного сигнала.
Выполнение системы визуализации, в состав которой входят, по меньшей мере, один стереоскопический проектор, экран для проецирования стереоскопического изображения и стереоскопические очки, что дает возможность совместить реальные объекты летательного аппарата с виртуальным трехмерным изображением объектов окружающей обстановки, позволяет получить максимально приближенное к реальному восприятие пилотом внешней окружающей обстановки с возможностью определения габаритов объектов, расстояния до них и скорости их перемещения, тем самым повышая эффективность обучения пилотов, а соответственно и безопасность полета в реальных условиях эксплуатации летательного аппарата.
Схематичная конструкция моделирующего комплекса приведена на чертеже.
Моделирующий комплекс включает макет 1 летательного аппарата с кабиной пилота, а также установленные вне макета 1 систему визуализации, вычислительный блок 2 с программным комплексом, рабочее место 3 инструктора с пультом управления, модули электропитания (на чертеже не показаны). Кабина пилота макета 1 летательного аппарата выполнена с интерьером, приближенным к кабине реального самолета, и снабжена рабочим местом 4 пилота, системой индикации, органами управления и контроля (на чертеже не показана). Система визуализации выполнена с возможностью формирования виртуальных трехмерных изображений объектов окружающей обстановки (самолет-заправщик, взлетно-посадочную полосу, деревья и др.) и включает, по меньшей мере, один стереоскопический проектор 5, экран 6 для проецирования панорамного изображения и стереоскопические очки (на чертеже не показаны).
В качестве рабочего места 4 пилота может быть использовано кресло с возможностью его регулировки по росту человека.
Расположение основных органов управления самолетом (летательным аппаратом) в кабине пилота макета 1 летательного аппарата соответствует макетируемому самолету.
Экран 6 для проецирования стереоскопического изображения может быть выполнен как с плоской, так и с изогнутой поверхностью. Например, экран 6 может быть цилиндрической или сферической формы.
Использование цилиндрического экрана обеспечивает необходимые углы обзора по вертикали и горизонтали, требует меньше пространства при его размещении, требует наличия меньшего количества проекторов.
Выбор формы экрана 6 зависит также от технических характеристик используемого в комплексе стереоскопического проектора (проекторов) 5.
В авиационном моделирующем комплексе может быть использован один или несколько стереоскопических проекторов 5.
Для обеспечения максимальной реалистичности воспроизведения изображения, дающего требуемую цветопередачу при высоком разрешении, высокую яркость при длительном сроке службы матриц, целесообразно использовать технологии 1 chip DLP или 3 chip DLP.
Предпочтительным решением является использование проектора, в котором имеется аппаратная функция коррекции нелинейных искажений, функция непрерывной автоматической синхронизации параметров яркости, цветности и функция мягкой сшивки изображений с наложением типа «оптический клин», например, проектор Barco Galaxy 12 NW.
Для обеспечения стереоскопического эффекта и комфортного восприятия изображения используется технология active infitec (активное мультихроматическое разделение), которая позволяет с помощью одного или нескольких проекторов 5 создавать самую качественную в настоящее время по контрастности и отсутствию артефактов стереопроекцию.
Проекторы 5 устанавливаются вне макета 1 летательного аппарата в соответствии с разработанной оптической схемой таким образом, чтобы обеспечить пилоту требуемые углы обзора по вертикали и горизонтали с воспроизведением стереоскопического изображения объектов окружающей обстановки.
При использовании одного проектора 5 он может быть закреплен с помощью специальных приспособлений на макете 1 летательного аппарата.
Для имитации дозаправки в воздухе макет 1 летательного аппарата снабжен заправочной штангой 7, форма, размеры и положение которой соответствуют заправочной штанге реального самолета.
Способ моделирования динамики полета летательного аппарата виртуальных трехмерных объектов окружающей обстановки осуществляется следующим образом.
Посредством программного комплекса вычислительного блока 2 моделирующего комплекса задают режимы пилотирования, условия полета (метеоусловия, время суток и т.д.), необходимые для отработки пилотом.
Далее с помощью системы визуализации моделирующего комплекса формируют виртуальные трехмерные изображения объектов окружающей обстановки. Для чего с помощью проектора (или нескольких проекторов) 5 на экран 6 проецируют соответствующее трехмерное изображение объектов окружающей обстановки, необходимое для отработки соответствующих маневров пилотирования. Например, для имитации дозаправки в воздухе с помощью проектора (или нескольких проекторов) 5 на экран 6 проецируют соответствующее виртуальное изображение самолета-дозаправщика с заправочной установкой, снабженной шлангом с заправочным конусом.
Затем с посредством управляющих воздействий пилота, использующего систему индикации, органы управления и контроля кабины 1 макета летательного аппарата осуществляется имитация полета летательного аппарата с заданными параметрами траектории полета.
Во время имитации полета совмещают виртуальные трехмерные изображения объектов окружающей обстановки с реальными объектами макета 1 летательного аппарата посредством управляющих воздействий пилота. Например, при имитации дозаправки в воздухе пилот посредством органов управления совмещает виртуальное изображение заправочного конуса с приемной заправочной штангой 7 макета 1 летательного аппарата.
Таким образом, заявленные изобретения позволяют повысить реалистичность изображения, а соответственно и эффективность обучения и тренировки летного состава точности управления и безопасности полета в реальном полете при решении следующих задач пилотирования: дозаправка в полете, полет строем, посадка на взлетно-посадочную полосу (ВПП), рулежка на ВПП и палубе авианосца и т.д., при любых заданных условиях полета (время суток, метеоусловия, ветровые возмущения и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Способ воспроизведения условий полета при помощи использования технологии виртуальной реальности на настольном пилотажном стенде для проведения эргономических исследований по информационно-управляющему полю пилотажной кабины | 2022 |
|
RU2793663C1 |
| Авиационный симулятор (авиасимулятор) самолета Boeing 737 | 2018 |
|
RU2688500C1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2277725C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| Стенд подготовки пилотов летательных аппаратов | 2017 |
|
RU2674548C1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
Изобретения относятся к авиационной технике. Способ моделирования динамики полета летательного аппарата включает формирование виртуальных трехмерных изображений объектов окружающей обстановки и имитацию полета летательного аппарата. Виртуальные трехмерные изображения объектов окружающей обстановки формируют с помощью системы визуализации моделирующего комплекса, снабженного макетом летательного аппарата. Во время имитации полета летательного аппарата совмещают виртуальные трехмерные изображения объектов окружающей обстановки с реальными объектами макета летательного аппарата посредством управляющих воздействий пилота. Моделирующий комплекс включает макет летательного аппарата с кабиной пилота, систему визуализации, вычислительный блок с программным комплексом, рабочее место инструктора с пультом управления, модули электропитания. Система визуализации выполнена с возможностью формирования виртуальных трехмерных изображений объектов окружающей обстановки, определения габаритов объектов, расстояния до объектов, скорости их перемещения и совмещения виртуальных трехмерных изображений объектов окружающей обстановки с реальными объектами макета летательного аппарата. В результате повышается достоверность отображения полета, а также эффективность и точность отработки пилотом маневров при пилотировании. 2 н. и 5 з.п. ф-лы, 1 ил.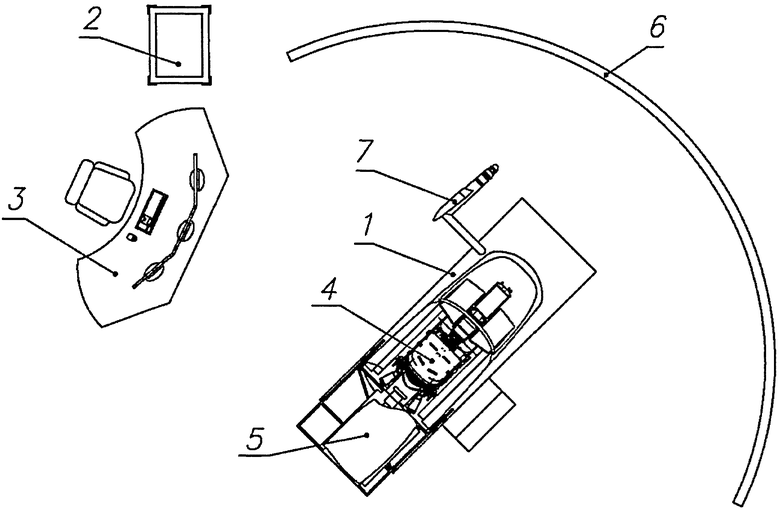
1. Способ моделирования динамики полета летательного аппарата, включающий формирование виртуальных трехмерных изображений объектов окружающей обстановки с помощью системы визуализации моделирующего комплекса, снабженного макетом летательного аппарата, и имитацию полета летательного аппарата, отличающийся тем, что во время имитации полета летательного аппарата совмещают виртуальные трехмерные изображения объектов окружающей обстановки с реальными объектами макета летательного аппарата посредством управляющих воздействий пилота, при этом для проведения дозаправки во время имитации полета формируют виртуальное изображение самолета-дозаправщика с агрегатом заправки, снабженным шлангом с заправочным конусом, а макет летательного аппарата выполняют с приемной заправочной штангой, при этом совмещают сформированное трехмерное виртуальное изображение заправочного конуса с реальной приемной заправочной штангой макета летательного аппарата.
2. Моделирующий комплекс для моделирования полета летательного аппарата, включающий макет летательного аппарата с кабиной пилота, интерьер которой соответствует кабине реального самолета, систему визуализации, вычислительный блок с программным комплексом, рабочее место инструктора с пультом управления, модули электропитания, отличающийся тем, что система визуализации выполнена с возможностью формирования виртуальных трехмерных изображений объектов окружающей обстановки, определения габаритов объектов, расстояния до объектов, скорости их перемещения и совмещения виртуальных трехмерных изображений объектов окружающей обстановки с реальными объектами макета летательного аппарата, при этом система отображения окружающей обстановки включает, по меньшей мере, один стереоскопический проектор, экран для проецирования панорамного изображения трехмерных объектов окружающей обстановки и стереоскопические очки, а для имитации полета строем комплекс дополнительно содержит второй макет летательного аппарата, выполненный аналогично первому.
3. Моделирующий комплекс по п.2, отличающийся тем, что система визуализации выполнена с использованием технологии 1 chip DLP или 3 chip DLP.
4. Моделирующий комплекс по п.2, отличающийся тем, что экран для панорамного изображения трехмерных объектов окружающей обстановки выполнен с плоской или изогнутой поверхностью.
5. Моделирующий комплекс по п.2, отличающийся тем, что стереоскопические очки выполнены с использованием активной или infitec-технологии.
6. Моделирующий комплекс по п.2, отличающийся тем, что система визуализации содержит два проектора.
7. Моделирующий комплекс по п.5, отличающийся тем, что содержит эмиттер для синхронизации изображения трехмерных объектов окружающей обстановки и стереоскопических очков с активной технологией посредством инфракрасного сигнала.
| Веретено для плетельной машины | 1936 |
|
SU51264A1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156501C1 |
| ВНУТРИКОСТНЫЙ ЗУБНОЙ ПРОТЕЗ | 1987 |
|
RU1557709C |
| Деаэрационная установка повышенного давления | 1985 |
|
SU1430351A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ИЗМЕРЕНИЕ КОНЦЕНТРАЦИИ АНАЛИТА | 2015 |
|
RU2680266C2 |
| US 6671100 B1, 20.12.2003 | |||
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 2009 |
|
RU2398286C1 |

