Пилотажно-тренировочный комплекс (ПТК) относится к области авиационной техники и предназначен для обучения и тренировки летного состава, проведения исследований в области эргономики. Известны (см. А.А.Красовский. Основы теории авиационных тренажеров. М.: Машиностроение, 1995 г.) конструкции комплексных тренажеров самолетов (КТС), где представлена (с.17) централизованная архитектура с неподвижной кабиной. Цифровая вычислительная система построена на основе нескольких мини-ЭВМ. Конструкция КТС включает макет аэродрома телевизионной системы имитации визуальной обстановки; макет местности, кабину тренажера; стойку сопряжения управляющей цифровой вычислительной системы (УЦВС) с аналоговой аппаратурой и саму УЦВС; имитаторы бортовых систем; аппаратура передачи данных; регистрирующее устройство; рабочее место инструктора.
Концепция оптимального электронного инструктора (ОЭИ) применительно к КТС сводится к следующему.
Параллельно с обучаемым летчиком, решающим задачи на КТС, те же задачи решает оптимальная - в смысле минимизации заданных целевых функционалов - автоматическая система ОЭИ. Эта система питается информацией от имитаторов тренажера. Действия обучаемых и действия ОЭИ сопоставляются по конечным результатам для формирования. Действия ОЭИ в той или иной форме предъявляются обучаемому, обеспечивают его автоматизированное обучение.
Однако данная система диагностики не является советчиком, помогающим экипажу в определении приоритетов сигналов тревоги и выделении наиболее важных из них критических ситуаций. Для получения высокой достоверности в обработке и диагностике сигналов тревоги по данным информации датчиков должна использоваться диагностическая система реального времени (РВ), которая путем прогнозирования возможных неисправностей определяет последовательность управляющих действия экипажа. Для работы ЭС необходима информация о состоянии бортового оборудования (БО) и должен осуществляться основной процесс: на основе имеющихся фактов в базе данных (БД) и базе знания (БЗ) и состоянии БО формируются новые факты, характеризующие текущую ситуацию на ЛА в реальном времени. Та часть информации в БД критических ситуаций, которая сформирована дедуктивной системой и определяет необходимые воздействия на ЛА, должна направляться экипажу в качестве рекомендаций.
Известна управляющая ЭС (см. Ильясов Б.Г., Парфенов Н.И., Черняховская Л.Р. Автоматизация принятия решения при управлении системами "человек-техника" с помощью экспертных систем. Эргономика в России, СНГ. "Мир". Международная конференция. С-Петербург, 1993 г.) для оказания помощи оператору, решающая следующие задачи: распознавание критической ситуации, принятие решений по управлению выводом сложной системы (объекта) из критической ситуации, выбор управляющих воздействий и контроль эффективности их реализации. В системе "человек-техника" критические ситуации, возникающие вследствие отказов техники, ошибок человека и неблагоприятных внешних условиях, приводят в случае непринятия своевременных и правильных управляющих решений к аварии или катастрофе. Принятие решений человеком, управляющим сложной системой, затруднено вследствие многомерности фактов для анализа, неопределенности и неоднозначности описания критических ситуаций, малым резервом времени и большой психологической нагрузкой.
В БЗ входят знания о предметной области управления сложной системой в критических ситуациях. В системе знания о проблемной области структурированы, исходя из цели построения управляющей ЭС, оказания помощи управляющему в принятии решений при возникновении критических ситуаций.
В качестве инструментального средства оказания помощи эксперту в выражении своей концептуальной модели проблемной области используется программная система создания БД характеристик критических ситуаций и баз данных БЗ. Система выполняет функции автоматизации получения знаний от экспертов. Данные представляются реляционной БД характеристик критических ситуаций, выполняется проверка целостности создания БД, производится ситуационная кластеризация данных.
В процессе экспертного опроса для обеспечения необходимой полноты БЗ экспертам ставится задача анализа новых для них ситуаций; способ решения задачи экспертной классификации является способом организации экспертных игр с коллективом экспертов. Сценарии экспертных игр предусматривают рассмотрение известных и новых для экспертов примеров критических ситуаций; в диалоге с ЭВМ заполняется БД. Создание и заполнение БД осуществляется с помощью средств систем управления реляционной БД для персональных ЭВМ с применением интеллектуального многооконного интерфейса. Окончательно согласованные экспертные оценки хранятся в БД и являются основой для создания правил распознавания критических ситуаций и принятия решений в БЗ ЭС.
Представление знаний об управлении системой в критических ситуациях осуществляется с помощью продуктивной модели, позволяющей представлять правила распознавания ситуаций и принятия решений. В качестве критерия распознавания классов критических ситуаций в управляющей ЭС используется степень близости распознаваемой ситуации, представленной вектором, к эталонным описаниям классов критических ситуаций.
Однако при такой структуре ЭС управления подсистема бортовых датчиков информации не включается в цикл работы по пилотированию ЛА. Динамические характеристики современных ЛА отличаются пониженной статистической устойчивостью, что привело к существенному усложнению САУ и значительному расширению функциональных возможностей. В то же время увеличение сложности САУ способствовало существенному увеличению разнообразия отказов этих систем. Потому стала практически невозможной разработка только инструктивных указаний по действиям пилота при возникновении каждого из возможных отказов. Подробные инструкции можно разработать только для ограниченного перечня отказов в пределах эксплуатационных ограничений ЛА-БО. Возникновение же в полете отказов, действия по устранению которых предварительно не отрабатывались и не отражены в инструкциях, представляет серьезную проблему. Как показывает анализ катастроф ЛА, нежелательное развитие событий можно было бы предотвратить, если бы были выполнены соответствующие грамотные действия экипажа. Однако время, которым располагает пилот для этого, обычно не превышает несколько секунд, а принимая во внимание стрессовое состояние человека во время аварии, становится ясно, что пилот может и не найти единственно правильного решения в нужный момент.
Целью разработки полезной модели является создание системы тренировки летного состава при катастрофических ситуациях в случае отказа бортового оборудования ЛА.
Для решения указанной задачи пилотажно-тренировочный комплекс (ПНК) обучения летного состава выводу из опасных (аварийных) ситуаций (АС) включает:
- системы визуализации (ВС) н отображения информации (СОИ) с соответствующими вычислителями управления;
- органы управления пилота, связанные с вычислителем динамики полета, вычислителями системы автоматического управления (САУ) и пилотажно-навигационного оборудования (ПНО);
- главный процессор, выход которого связан через вычислитель информационного обеспечения с вычислителями управления СОИ и управления визуализацией, а вход соединен с вычислителями САУ и ПНО;
- блоки задания начальных условий и возмущений в полете;
- систему автоматической обработки и документирования результатов обучения;
- пульт управления с дисплеем в кабине пилота, в соответствии с изобретением в него введены экспертная система (ЭС) с базой данных (БД), базой знаний (БЗ), машиной логического вывода (МЛВ);
- блоки распознавания конфигурации летательного аппарата (БРК ЛА), режимов полета (БРП), распознавания аварийной ситуации АС (БРАС), развития АС (БРАЗАС), прогноза развития АС (БПРАЗАС), включающий блок моделирования динамики ЛА-БО, связанный с БЗ развития АС, БЗ характеристик АС и БЗ по выводу из АС;
- анализаторы состояния ПНО, ЛА-БО, правильности действий по выводу из АС;
- пульт управления инструктора, соединенный с блоками заданий начальных условий и возмущений в полете.
Входы БРК, БРП, анализаторов состояния ПНО н ЛА-БО соединены с БД по отказам БО, а их выходы - с первым, вторым, третьим и четвертым входами БРАС. Пятый вход БРАС соединен с БД по отказам БО, шестой связан с блоком моделирования динамики ЛА-БО, а седьмой - с БЗ характеристик АС. Первый выход БРАС связан с первым входом МЛВ. Первый вход блока моделирования динамики ЛА-БО связан с БД по отказам БО, а второй вход - с выходом БЗ характеристик АС, связанный, в свою очередь, с БЗ по выводу из АС, выход которого соединен с анализатором правильности действий по выводу из АС, выход которого связан со вторым входом МЛВ. Выход МЛВ соединен с пультом управления пилота в кабине, далее связанный с первым входом дисплея, второй вход которого соединен с БД по отказам БО, для обучения летного состава выводу из опасных аварийных ситуаций.
Сущность изобретения поясняется на чертеже, на котором изображена структурная схема системы тренировки экипажа в опасных и критических ситуациях.
1. Двигатели.
2. Топливная система
3. Гидросистема.
4. Система электроснабжения.
5. Система штатного управления.
6. Система выпуска шасси и торможения.
7. Система жизнеобеспечения.
8. Противообледенительная система.
9. Противопожарная система.
10. Система автоматического управления (САУ).
11. Система воздушных сигналов (СВС).
12. Система самолетовождения.
13. Спутниковая навигационная система (СНС).
14. Бесплатформенная инерциальная навигационная система (БИНС).
15. Радиовысотомер (РВ).
16. Приборная система посадки (ПСП).
17. Радиотехническая система ближней навигации.
18. Радиолокационная станция (РЛС).
19. Система предупреждения критических режимов (СПКР).
20. База данных (БД) по отказам бортового оборудования (БО).
21. Блок распознавания состояния конфигурации (БРСК).
22. Блок распознавания режима полета (БРРП).
23. Анализатор состояния пилотажно-навигационного оборудования (АС ПНО).
24. Анализатор состояния аппаратуры БО (АСА БО).
25. Блок распознавания аварийной ситуации (БРАС).
26. Блок прогноза.
27. Блок моделирования динамики системы ЛА-БО.
28. База знаний (БЗ) развития аварийной ситуации (АС).
29. База знаний (БЗ).
30. БЗ характеристик АС.
31. БЗ по выводу из АС.
32. Машина логического вывода (МЛВ).
33. Анализатор правильности действий по выводу из АС (АПДВ).
34. Пульт управления ЭС в кабине.
35. Вычислитель управления системой отображения информации.
36. Система отображения информации (СОИ).
37. Дисплей ЭС.
38. Органы управления в кабине летчика.
39. Вычислитель динамики полета.
40. Система автоматической обработки и документирования результатов тренировки.
41. Блок задания начальных условий.
42. Пульт управления инструктора.
43. Инструктор.
44. Вычислитель управления визуализацией в кабине летчика.
45. Система визуализации.
46. Вычислитель информационного обеспечения.
47. Главный процессор.
48. Вычислитель САУ.
49. Вычислитель пилотажно-навигационного оборудования (ПНО).
50. Блок задания возмущений.
В ПТК обучения летного состава по выводу из опасных, аварийных ситуаций, включающем системы визуализации (ВС) 45 и отображения информации (СОИ) 36, которые связаны с соответствующими системами управления 35 и 44, органы управления 38 пилота связаны с вычислителем 39 динамики полета, вычислителями САУ 48, ПНО 49. Главный процессор 47 связан с МЛВ 32 вычислителем 39 динамики полета, вычислителем 49 ПНО, вычислителем 48 САУ, а выход его связан с вычислителем 46 информационного обеспечения; связан с системами управления визуализации 44 и вычислителем управления СОИ 35. Вычислитель динамики полета 39 связан с системой автоматической обработки и документирования 40, который связан с вычислителем 49 ПНО и блоком 41 задания начальных условий, связанным с вычислителем ПНО 49, соединенным с блоком задания возмущений 50. Пульт управления 34 пилота связан дисплеем 37 ЭС и машиной логического вывода 32 ЭС. Пульт управления инструктора 42 связан с БД 20 по отказам БО, с блоками задания начальных условий 41 и блоком задания возмущений 50. БД 20 по отказам БО включает как подсистемы 1-19 БО, БРСК ЛА 21, БРП 22, БРАЗАС 25, БПРАЗАС 26, включающий блок моделирования динамики ЛА-БО 27, связанный с БЗ развития АС 28; анализаторы состояния ПНО 23, состояния ЛА-БО 24 соединены с БД по отказам БО 20.
Выходы указанных блоков 21, 22, 23, 24 соединены с первым, вторым, третьим, четвертым входами БРАС 25, пятый вход которого соединен с БД по отказам Б О 20. Шестой вход его связан с блоком моделирования динамики ЛА-БО 27; седьмой вход его связан с БЗ характеристик АС 30, а первый выход его связан с первым входом МЛВ 32. Первый вход блока моделирования динамики ЛА-БО 27 связан с БД по отказам БО 20; второй вход соединен с выходом БЗ характеристик АС 30, последний связан, в свою очередь, с БЗ по выводу из АС 31, выход которого соединен с анализатором правильности действий по выводу из АС 33. Его выход связан со вторым входом МЛВ 32, выход МЛВ 32 соединен с пультом управления 34 пилота в кабине и далее связан с первым входом дисплея 37, второй вход которого соединен с БД по отказам БО 20.
Система работает следующим образом.
Воспроизведение полета в виртуальной среде, которая реализована в ПТК, выполняется по информации моделирования, полученной в вычислителях 47, 39, 48, 49.
Летчик на основе восприятия информации, поступающей от информационных моделей 36, 37, 45, формирует управляющие воздействия на органы управления 38.
Системы отображения информации (СОИ) 36, органы управления 39 и оборудование, с которым непосредственно работает летчик, образуют рабочее место кабины. В моделирующем комплексе рабочее место представляет собой макет кабины в виде полунатурной модели реальной кабины, которая позволяет проводить эргономические исследования.
Система визуализации 45, управляемая в соответствии с сигналами органов управления 38, воспроизводит информационную модель внешней обстановки. Она обеспечивает визуальное восприятие летчиком движения ЛА относительно земной поверхности на различных этапах полета, обеспечивает психологически верное восприятие окружающего пространства и перемещения ЛА. Эта система состоит из блоков обработки информации, обеспечивающих управление воспроизведением и изменением визуальных картин на средствах наблюдения - мониторах, экранах.
Математическая модель системы управления - вычислитель САУ 48 обеспечивает многообразие режимов и законов управления путем перехода с одних вариантов на другие по выбору летчика. Это дает гибкость в преобразовании моделей при исследованиях и возможность моделирования высокодинамических процессов.
Математическая модель динамики ЛА 39 обеспечивает пространственное движение ЛА без ограничения углов поворота в условиях действия возмущений 50. Сигналы с выхода вычислителя модели динамики 39 поступают в главный процессор 47 и далее в информационную модель, образуемую системами СОИ 36 и визуализации 45.
Информационная модель комплекса имитирует процесс управления, сохраняя все существенно важные свойства реального ЛА и процессов управления. Она обеспечивает все виды операторской деятельности на реальном ЛА. Информационная модель обеспечивает информационное и динамическое подобие СОИ 36 и изменения формы представления информации в системе визуализации 45.
В системе визуализации 45 с синтезируемым изображением на телевизионных экранах математическая модель внекабинной обстановки хранится в памяти ЭВМ 35 и 44 в форме цифрового кода. Данные трехмерной модели, заложенные в память ЭВМ 35 и 44, постоянно трансформируются в реальном масштабе времени в соответствии с динамикой полета и выдаются на экраны 37, 36, 45. Синтезируемые цветные изображения комбинируются с изображениями макетов местности и объектов визуальной обстановки.
В вычислителе модели ПНО-49 для управления движением ЛА требуется информация, характеризующая действительное его движение. Такая информация содержит сведения о значениях параметров движения, которые получаются с помощью измерений, основанных на использовании различных физических явлений, и решения уравнений связи измеряемых величин с параметрами движения ЛА. Измерительные системы используются как самостоятельные системы для измерения параметров движения или как составные части навигационной информации приборов и систем с выдачей результатов измерений в вычислительное устройство для определения параметров движения.
По своему назначению ЭС в нормальных условиях полета наблюдает за состоянием ЛА, режимами работы двигателей, работой БО и экипажа. При возникновении ОС ЭС оценивает информацию о внешней и внутренней среде, когда ЛА оказывается за пределами эксплуатационных ограничений. На основе БЗ 29, сформированной по результатам анализа и опыта исследования авиационных катастроф, ЭС классифицирует данную ситуацию (АС) по тяжести возможных последствий, формирует решения и выдает рекомендации по минимизации неблагоприятных последствий. В ЭС в блоке 26 моделируется поведение системы ЛА-БО и выдается прогноз развития событий в полете - информация о возможном состоянии БО, работе двигателей и параметров, характеризующих поведение ЛА. Кроме того, ЭС моделирует поведение экипажа по управлению системой ЛА-БО по выводу из опасной ситуации. Если экипаж предпринимает правильные действия в соответствии с руководством по летной ситуации, то ЭС не вмешивается в управление ЛА, а лишь выдает на экран СОИ-37 рекомендации и подсказки действий экипажу (потеря сознания летчиком и др.). На рекомендованное решение по выводу из опасных ситуаций, которые приводят к катастрофическим последствиям, ЭС формирует необходимые корректирующие и управляющие сигналы в главный процессор 47 и САУ-48 по парированию опасной ситуации и стабилизации полета ЛА. Блок 22 - распознавания режима полета построен на рекуррентном алгоритме решения системы неравенств - решающее правило опознавания образов по параметрам линейных координат и скоростей, углов и угловых скоростей, линейных перегрузок, отклонения органов управления и средств механизации.
В блоке 24 для обнаружения и идентификации неисправностей в процессе эксплуатации ЛА используется поиск "наилучшего варианта" среди возможных правил для эффективного опознавания и обработки нештатных ситуаций. Важное значение имеют средства ЭС, позволяющие обнаружить ухудшение и потерю рабочих характеристик. Система учитывает физическое аналитическое резервирование.
В системе организована статистическая база данных, в память которой занесен список всех подсистем и приборов по секциям в виде постоянной информации.
В динамической БД, области памяти, общедоступной всем модулям системы, выводятся показания - выходная информация всех подсистем и список отказавших приборов (тип "классной доски"). Если прибора нет в списке секции, то вводится его аналитический эквивалент датчика.
ЭС осуществляет обработку информации от датчиков 1-19 систем с целью анализа работоспособности БО в процессе полета, положение и изменение органов управления систем, текущего положения ЛА в пространстве и окружающей обстановке.
Блок распознавания состояния конфигурации (БРСК-21) ЛА предполагает наличие управления конфигурацией (реконфигурацией) систем управления - изменение структуры и параметров органов управления ЛА в соответствии с программой полета. Необходимость в реконфигурации обусловлена изменением штатного режима функционирования подсистем, переходом с режима на режим.
Управление конфигурацией ЛА предполагает рассмотрение подсистем в качестве объектов управления. Предусматривается возможность изменения конфигурации при изменении штатных режимов. Для этого выбирается совокупность режимов полета R (взлет, набор высоты и т.д.) и для каждого синтезируется оптимальная конфигурация системы. Управление конфигурацией, таким образом, сводится к реализации отображения Но: R→ψ, где ψ - конфигурация ЛА. При внезапных отказах в системе блок в условиях ограниченного времени оценивает ситуацию и осуществляет соответствующую перестройку системы оптимальным образом. Т.е. блок БРСК наделяется комплексом знаний о возможных ситуациях и умением делать правильные выводы о необходимых действиях по изменению конфигурации и последствиях.
БРСК-21, поддерживая реконфигурацию ЛА, должен решать такие задачи, как локализация отказов аппаратуры, анализ внешних и внутренних параметров системы, сопоставление характеристик полета с эффективностью воздействий, не производимые САУ.
БЗ в системе организованы по принципу "правило - цель", т.е. каждой цели, обусловленной возникновением АС и условиями полета, соответствует набор возможных стратегий летчика по устранению или локализации этих ситуаций.
Управляемые данными правила вида "условие - действие" активизируются изменениями в состоянии БЗ. Корректирующие действия определяются скрытыми целями, которые в обычной обстановке пассивны и активизируются, когда возникает одна или более аварий.
Реальные возможности ЭС определяются качеством БЗ-28-29,31. В БЗ входят знания о предметной области управления ЛА в критических ситуациях, собранные в научно-технической литературе, инструкциях и руководствах по эксплуатации БО, САУ и ЛА, а также при консультациях с экспертами, на опыте и анализе всех зафиксированных катастроф и авиационных происшествий за многолетний период.
Аварийная катастрофическая ситуация АС характеризуется вектором признаков х={x1,х2,...,хk}.
Реляционная БЗ-29-31 БД определяется как R<S, P, KoR, Kr, D, Kd, V>.
Здесь обозначены атрибуты:
S - наименование классов катастрофических ситуаций (КС);
Р - возможные неблагоприятные последствия катастрофических ситуаций;
Ко - коэффициент опасности последствий;
R - причины возникновения КС;
Кr - коэффициенты уверенности в причинах r (r=1...q);
Х - признаки КС;
Кх - коэффициенты информативности признаков Х (j=1...k) для распознавания классов КС Si (i=1...m);
D - управляющие решения;
Kd - коэффициенты уверенности в правильности решений d;
V - управляющие воздействия.
БД содержит примеры конкретных реализаций КС, полученные из объективных описаний реальных КС, имевших место в полетных ситуациях и из опыта экспертов.
Моделью представления знаний об управлении системами ЛА в критических ситуациях является продукционная модель, позволяющая наиболее наглядно и удобно представлять правила распознавания ситуаций и принятия решений. Правила распознавания КС в такой модели выглядят следующим образом.
Это класс (Si), если есть признак X11i с коэффициентом Кх(Х11i), и есть признак Х21i с коэффициентом Кх(Х21i), и есть признак Xkqi с коэффициентом Kx(Xkqi).
Здесь i=1...m;
x, r, j, i - значение признака xr˜Х для прототипа j класса КСi;
qi - количество эталонных признаков БЗ класса, соответствующих определенной причине.
В качестве критерия распознавания классов КС в управляющей системе используется степень близости распознаваемой ситуации, представленной вектором Х к эталонным описаниям набора АС и КС для конкретного типа ЛА.
В ЭС в блоке БРАС-25 используется логический метод принятия решений, основанный на полноте БЗ ЭС, содержащей формализованный опыт специалистов, определяющий способность системы квалифицированно принимать решения. Поэтому процедура распознавания образов позволяет анализировать для этого хранящийся в БЗ опыт принятия решений специалистами.
Задача технической диагностики состоит в классификации объекта к одной из известных ситуаций (исправен ЛА, САУ или нет), что укладывается в рамки распознавания образов. Несмотря на бесконечное разнообразие конкретных проявлений критических ситуаций, существует конечное множество решений по управлению выводом сложной системы из КС, определяемое ограниченными ресурсами управляющей части системы. Это достигается путем разбиения множества возможных КС на классы, каждому из которых соответствует определенное управляющее решение; КС характеризуются вектором признаков X.
Задача распознавания образов состоит в целесообразности разбиения какого-либо множества объектов на классы, причем в каждый класс входят объекты, близкие друг другу с точки зрения определенного критерия. Если заданы два конечных множества А и В представителей соответственно первого и второго рода (образа), то для решения задачи распознавания образов строится решающее правило (на основе информации, заключенной в множествах А и В - БЗ), согласно которому всякий новый объект, подлежащий диагностике, будет отнесен либо к первому, либо ко второму образу.
Распознавание образов реализуется следующим образом. Если на какой-то стадии принятия решения при выборе из двух альтернативных гипотез оказалось, что решение принимается с необходимым запасом надежности, то блок распознавания образов 25 находит в БД примеры аналогичных ситуаций с известными решениями, формулирует решающее правило, разделяющее ситуации, соответствующие первой гипотезе, от ситуаций, соответствующих второй гипотезе, и определяет для конкретной ситуации, какая гипотеза для нее реализуется. Т.е. в блоке БРАС-25 в алгоритмическом виде дано множество P=P1,...,PL независимых свойств объекта, М-признаков, характеризующих объект с различных сторон исследования, множество Qm=Qm1...Qmn возможных значений m признака; A=a1...am - множество возможных состояний объекта исследования; при этом состояние а1 из А характеризуется вектором аi=аi1...aim.
На основе знаний эксперта для каждого состояния из А идентифицируется наличие соответствующих свойств из множества Р и тем самым строится классификация множеств.
Наличие высокодинамической окружающей среды требует организации функционирования ЭС в реальном масштабе времени. При этом для обнаружения и прогноза неисправностей в блоке прогноза 26 применен подход, в основу которого положен принцип внутреннего моделирования текущих параметров полета и увязывания их в единое целое. Использование внутренних моделей параметров поведения ЛА и БО позволяет диагностировать совмещенные ошибки поведения и неисправности аппаратуры.
Важнейшим требованием, предъявляемым к модели ЛА-БО-27, является точность отражения происходящих в действительности процессов. Управляющая ЭС предоставляет экипажу следующие возможности;
- осуществлять формирование совета летчику, управляющему ЛА-САУ по принятию управляющих решений;
- составлять инструкции и рекомендации по управлению объектом в КС;
- разработанные алгоритмы распознавания и принятия решений в КС использовать для автоматического управления выводом системы ЛА-САУ из КС при малом резерве времени;
- проводить тренировки экипажей по управлению ЛА в условиях возникновения КС.
КС или АС в человеко-машинных системах требуют принятия согласованных управленческих решений в условиях неопределенности и ограниченного резерва времени. При решении этих задач человек (экипаж) играет роль управляющего, а управляемая экспертная система - роль инструктора. Роли закладываются в сценарии взаимодействия, варианты разрабатываются для характерных интервалов резерва времени. Для задания сценариев взаимодействия удобно пользоваться моделями иерархического процесса.
Существенным фактором АС является неопределенность момента возникновения и определяющих ее параметров, задаваемых инструктором с пульта управления 42. В этих условиях располагаемый резерв времени может быть использован для уменьшения неопределенности и принятия более обоснованного решения. Важно использование резерва времени для организации целенаправленной деятельности человека по выходу из АС, в частности, по согласованию вариантов решений ЭС и человека. Располагаемый резерв времени влияет на выбор стратегии анализа ситуации, обуславливает возможность диалога с ЭВМ при согласовании решений. При этом должно обеспечиваться условие, что ЭС способна обеспечить обнаружение признаков нарушений и выдвижение гипотез относительно АС, определение вариантов решений по выходу из АС, оценку ее эффективности, оценку располагаемого в АС резерва времени.
Сценарии взаимодействия задают структуру обмена сообщениями участников и отражают основные функции управления в АС:
- обнаружение и анализ нарушений;
- принятие решений и переход на аварийную программу;
- контроль исполнения программы управления;
- контроль эффективности программы.
Сценарии предусматривают диалоговые фрагменты разрешения конфликтов принятия решений при переходе на аварийную программу и контроле ее исполнения (контроль ошибочных действий).
ЛА является объектом управления - наблюдаемый во времени T[0,t] или t[t,T] процесс Y(t), описывающий функционирование системы; Y(t) - наблюдаемые изменения таких величин, как высота, скорость полета, углы тангажа, крена, рыскания или перекладки штурвала, рулей и других величин.
Y(t) порождается системой S со структурами организации ее элементов Si, которые в совокупности при взаимодействии определяют ее качество или свойство. Необходимо задать такую структуру Q из этих элементов Si, при которой управляющие воздействия U(t) на процесс Y(t) обеспечили бы более высокий уровень безопасности полетов.
Y(t) - вектор показателей, характеризующих деятельность летчика, как функция управляющих воздействий U(t):
Y(t)=f(u|{rk},S,t)
t=toT

где to=0 - начальный момент времени;
Т - период наблюдения;
Rk - факторы типа возмущений или ошибка управления и неопределенности информации, влияющей как на Y(t), так и на u(t);
f=Q - алгоритм или технология воздействия на систему "экипаж - ЛА" при пилотировании - это алгоритм управления ЛА в заданном полете. В данной ситуации формируются алгоритмы управления f и самоуправление на основе обратных связей, которые вводятся на основе БЗ ЭС и на основе контроля текущего состояния с помощью бортовых датчиков.
СОИ-37 в виде многофункционального индикатора предназначена для отображения визуальной информации в виде текстов, шкал, мнемосхем.
ЭС выдает на дисплей СОИ-37 предупреждающую информацию при появлении отклонения от нормального режима полета, сигналы звуковой и аварийной сигнализации и выдачу командных сигналов на СОИ-37 экипажу о необходимых действиях в АС (отсутствие резерва дублирующих систем, перенацеливание посадки и др.). ЭС формирует и выдает на дисплей управляющие и корректирующие сигналы при отсутствии реакции экипажа на АС (пожар, разгерметизация, экипаж не работоспособен и др.). ЭС выдает справочную информацию по запросу экипажа на дисплее СОИ-37.
Для выдачи важной для управления информации на экране индикатора-дисплея-37 используется "окно предупреждения" и "информационное окно" с дублированием информации голосом, центральным сигнальным огнем. Блок-37 включает в себя для обеспечения человеко-машинного интерфейса в системе диалоговый интерпретатор и генератор организаторов диалога, что обеспечивает гибкую перенастройку диалога и управления процессами управления во всех режимах функционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ЭКИПАЖА ВОЗДУШНОГО СУДНА ПО ПРЕДОТВРАЩЕНИЮ ОСОБЫХ СИТУАЦИЙ | 2008 |
|
RU2386569C2 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| ЭКСПЕРТНАЯ СИСТЕМА КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2517422C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЯ ПО ПРОВЕДЕНИЮ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В ОГРАНИЧЕННОЕ ВРЕМЯ | 2019 |
|
RU2728946C1 |
Изобретение относится к средствам имитационной техники для профессиональной подготовки летного состава. Технический результат - расширение функциональных возможностей. Для достижения данного результата введены экспертная система с базой данных и машиной логического вывода, блок распознавания состояния конфигурации летательного аппарата, блок режимов полета, блок распознавания аварийной ситуации, блок развития аварийной ситуации, блок прогноза развития аварийной ситуации. При этом блок прогноза содержит блок моделирования динамики бортового оборудования летательного аппарата, который связан с базой знаний развития аварийной ситуации. 1 ил.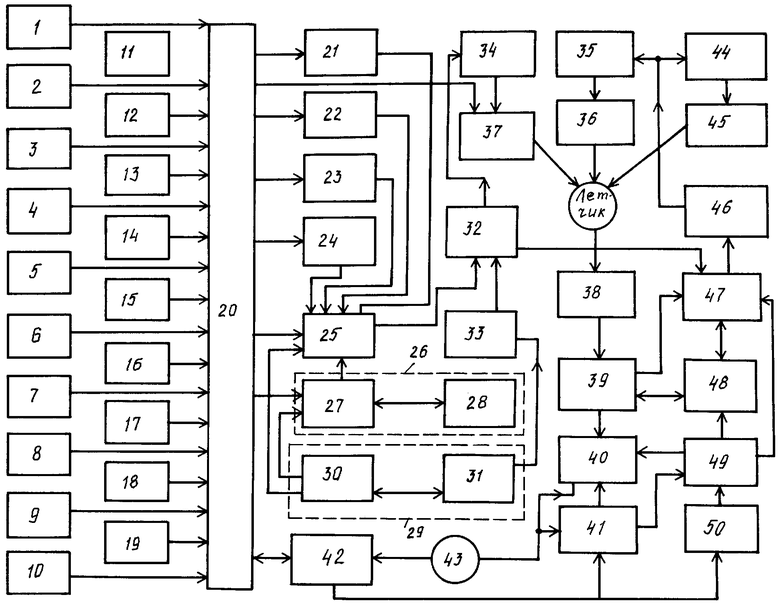
Пилотажно-тренировочный комплекс, включающий системы визуализации и отображения информации с соответствующими системами и вычислителями управления, органы управления пилота, связанные с вычислителем динамики полета, вычислителями автоматической системы управления, пилотажно-навигационного оборудования, связанный с ними главный процессор, выход которого связан через вычислитель информационного обеспечения с вычислителями управления системой отображения информации и системой управления визуализацией, блоки задания начальных условий и возмущений в полете, систему автоматической обработки и документирования результатов обучения, пульт управления с дисплеем в кабине пилота, отличающийся тем, что в него введены экспертная система с базой данных, машиной логического вывода, блок распознавания состояния конфигурации летательного аппарата, блок режимов полета, блок распознавания аварийной ситуации, блок развития аварийной ситуации, блок прогноза развития аварийной ситуации, включающий блок моделирования динамики бортового оборудования летательного аппарата, связанный с базой знаний развития аварийной ситуации, база знаний характеристик аварийной ситуации и база знаний по выводу из аварийной ситуации, анализатор состояния пилотажно-навигационного оборудования, анализатор состояния бортового оборудования летательного аппарата, анализатор правильности действий по выводу из аварийной ситуации, пульт управления инструктора, соединенный с блоками задания начальных условий и возмущений в полете, входы блока распознавания конфигурации летательного аппарата, блока распознавания режима полета, блока анализатора состояния пилотажно-навигационного оборудования и анализатора состояния бортового оборудования летательного аппарата соединены с базой данных по отказам бортового оборудования, а их выходы соединены с первым, вторым, третьим, четвертым входами блока распознавания аварийной ситуации, пятый вход которого соединен с базой данных по отказам бортового оборудования, шестой вход - с блоком моделирования динамики состояния оборудования летательного аппарата, седьмой вход - с базой знаний характеристик аварийных ситуаций, а выход - с первым входом машины логического вывода, первый вход блока моделирования динамики состояния бортового оборудования летательного аппарата связан с базой данных по отказам бортового оборудования, второй вход соединен с выходом базой знаний характеристик аварийных состояний, который соединен с входом базой знаний по выводу из аварийных состояний, выход которой соединен с анализатором правильности действий по выводу из аварийных состояний, выход которого связан со вторым входом машины логического вывода, выход которой соединен с пультом управления пилота в кабине и с первым входом дисплея, второй вход которого соединены с базой данных по отказам бортового оборудования для обучения летного состава выводу из опасных аварийных ситуаций.
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| СИСТЕМА ПОДГОТОВКИ ДАННЫХ ДЛЯ АНАЛИЗА РЕЗУЛЬТАТОВ ПИЛОТИРОВАНИЯ | 2001 |
|
RU2179744C1 |
| US 5260874 А, 09.11.1993 | |||
| DE 19703736 А1, 06.11.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ ПРИБОРОВ ДЛЯ СМАЗОЧНО-ЗАПРАВОЧНЫХ ОПЕРАЦИЙ | 2020 |
|
RU2731069C1 |
| US 6319008 B1, 20.11.2001 | |||
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |

