Настоящий способ относится к области обработки и отображения пространственной информации, к компьютерным средствам преобразования и визуализации трехмерных моделей на плоскости с помощью центральной проекции с учетом уровня информативности и визуального восприятия получаемого перспективного изображения и может быть использован для построения на плоскости перспективных карт на основе трехмерных цифровых моделей местности.
Из предшествующего уровня техники известен способ горизонтального перспективного изображения, включающего проецирование точек трехмерного пространства на плоскость из одной или нескольких точек наблюдения для получения одного или нескольких наборов спроецированных точек, создание одного или нескольких горизонтальных перспективных изображений в пространстве, где каждое из изображений сформировано на основе одного из набора спроецированных точек, создание стереоскопических изображений по полученным перспективным изображениям (Horizontal perspective representation, патент US 2007/0291035 А1, дата публикации 20.12.2007 г.).
Недостатком известного способа является отсутствие оптимизации параметров перспективного проецирования для повышения уровня информативности получаемого изображения, в том числе отсутствие механизмов нахождении оптимального положения центра перспективной проекции (точки наблюдения) с целью наиболее выгодного отображения пространства предметов на плоскости в рамках тематической направленности создаваемого перспективного изображения.
Известен способ изображения предметов (варианты), взятый в качестве прототипа, включающий изображение предметов путем центральной проекции точек пространства предметов пучком лучей на картинную поверхность, причем согласно первому варианту данного способа перед проецированием указанных точек в пространстве предметов на заданном расстоянии от центра проекции и перпендикулярно к главному лучу пучка устанавливают вспомогательную плоскость, а каждую точку пространства предметов сдвигают по перпендикуляру к этой плоскости до расстояния от плоскости, равного произведению величины исходного расстояния точки от вспомогательной плоскости на коэффициент сжатия пространства в упомянутой точке. Согласно второму варианту данного способа перед проецированием указанных точек в пространстве предметов на заданном расстоянии от центра проекции и перпендикулярно к главному лучу пучка устанавливают вспомогательную плоскость, а каждую точку пространства предметов перемещают на эту плоскость по лучу, проходящему через виртуальный центр проекции, который располагают на линии главного луча пучка на расстоянии от вспомогательной плоскости, равном частному от деления величины расстояния от центра проекции до вспомогательной плоскости на коэффициент сжатия пространства в упомянутой точке (Способ изображения предметов (варианты), патент №2241258, дата публикации 27.11.2004).
Недостатком известного способа является отсутствие оптимизации параметров перспективного проецирования для повышения уровня информативности получаемого изображения, в том числе отсутствие механизмов нахождении оптимального положения центра перспективной проекции (точки наблюдения) с целью наиболее выгодного отображения пространства предметов на плоскости в рамках тематической направленности создаваемого перспективного изображения.
Задача, на решение которой направлено заявленное техническое решение, заключается в нахождении оптимального положения центра проекции (точки наблюдения) при создании перспективной карты на основе трехмерной цифровой модели местности с целью наиболее выгодного отображения объектов местности на плоскости в соответствии с тематической направленностью создаваемой перспективной карты.
Поставленная задача достигается тем, что по первому варианту способ построения перспективных карт по трехмерной цифровой модели местности включает центральное проецирование точек трехмерной цифровой модели местности пучком лучей на плоскость, согласно изобретению, в нем перед проецированием точек трехмерной модели выбирают объект картографирования в виде трехмерной цифровой модели местности и определяют его границы в горизонтальной проекции, задают установочные параметры создаваемой перспективной карты, выбирают критерий оптимальности перспективного отображения объекта картографирования, задают значение горизонтального и вертикального угла обзора, строят некоторую предварительную трассу точек наблюдения (центров проецирования) вокруг картографируемого объекта в горизонтальной проекции таким образом, чтобы картографируемый объект вписывался в створы горизонтальных углов обзора, построенных из каждой точки наблюдения на трассе, при этом определяют количество и характер распределения точек наблюдения по построенной трассе в зависимости от формы горизонтальной проекции картографируемого объекта, вычисляют угол разбиения горизонтального угла обзора на створы в зависимости от среднего размера горизонтальной проекции элементов объекта картографирования, строят для каждой точки наблюдения семейство отдельных вертикальных сечений (профилей) трехмерной цифровой модели местности в пределах горизонтального угла обзора через выбранный угол разбиения, определяют для каждого сечения угол наклона луча наблюдения в зависимости от высоты и плотности застройки, изрезанности рельефа и заданного критерия оптимальности обзора картографируемого объекта, определяют уточненное положение точки наблюдения для каждого сечения, находят окончательное положение каждой точки наблюдения на построенной трассе путем усреднения найденных оптимальных значений высоты точки наблюдения во всех сечениях, строят для каждой точки наблюдения трехмерную сцену, содержащую совокупность элементов трехмерной модели, попадающих в область обзора, выбирают из всех построенных сцен одну трехмерную сцену, максимально отображающую объект картографирования (в соответствии с заданным критерием оптимальности), например, сцену, в которой средняя величина критерия оптимальности по всем ее ранее построенным сечениям максимальна, при этом точку наблюдения данной трехмерной сцены используют как центр проекции при создании искомого перспективного изображения объекта картографирования, оформляют полученное перспективное изображение в виде перспективной карты в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте,
по второму варианту способ построения перспективных карт по трехмерной цифровой модели местности включает центральное проецирование точек трехмерной цифровой модели местности пучком лучей на плоскость, согласно изобретению, в нем перед проецированием точек трехмерной модели выбирают объект картографирования в виде трехмерной цифровой модели местности и определяют его границы в горизонтальной проекции, задают установочные параметры создаваемой перспективной карты, выбирают критерий оптимальности перспективного отображения объекта картографирования, задают значение горизонтального и вертикального угла обзора, выбирают предварительное положение точки наблюдения в горизонтальной проекции картографируемого объекта, например, точку наблюдения располагают в центроиде картографируемого объекта, вычисляют угол разбиения картографируемого объекта в горизонтальной плоскости из точки наблюдения по кругу в зависимости от среднего размера горизонтальной проекции элементов объекта картографирования, строят из точки наблюдения через вычисленный угол разбиения отдельные вертикальные сечения (профили) трехмерной цифровой модели местности, определяют для каждого сечения угол наклона луча наблюдения в зависимости от высоты и плотности застройки, изрезанности рельефа и заданного критерия оптимальности обзора картографируемого объекта, находят окончательное положение точки наблюдения в плане и по высоте путем усреднения уточненных положений точек наблюдения, найденных для каждого сечения, разбивают горизонтальную проекцию картографируемого объекта на сектора, образованные горизонтальным углом обзора, построенным из точки наблюдения, при этом соблюдают перекрытие створов горизонтальных углов обзора 60%, строят для каждого сектора трехмерную сцену, содержащую совокупность элементов трехмерной модели, попадающих в область обзора, при этом точку наблюдения используют как центр проекции при создании перспективных изображений для всех секторов, производят построение перспективных изображений для каждого сектора и производят сшивку полученных отдельных изображений в искомую перспективную панораму картографируемого объекта, оформляют полученное перспективную панорамное изображение в виде перспективной карты в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте,
а также решается задача наиболее выгодного отображения особо важных элементов картографируемого объекта за счет того, что вводят в процесс определения оптимальности изображения картографического объекта систему весовых коэффициентов, при этом каждому элементу трехмерной модели присваивают весовой коэффициент, а в формулу расчета коэффициента оптимальности вводят сумму весовых коэффициентов всех элементов объекта картографирования, видимых из данной точки наблюдения.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является оптимальное (в соответствии с выбранным критерием оптимальности) положение центра проекции (точки наблюдения) при создании перспективной карты на основе трехмерной цифровой модели местности, обеспечивающее наиболее выгодное отображение объектов местности на плоскости в соответствии с тематической направленностью создаваемой перспективной карты.
Предлагаемое изобретение иллюстрируется следующими чертежами:
фиг.1 - Расположение точек наблюдения и построение семейства профилей согласно первому варианту способа;
фиг.2 - Расположение точек наблюдения и построение семейства профилей согласно второму варианту способа;
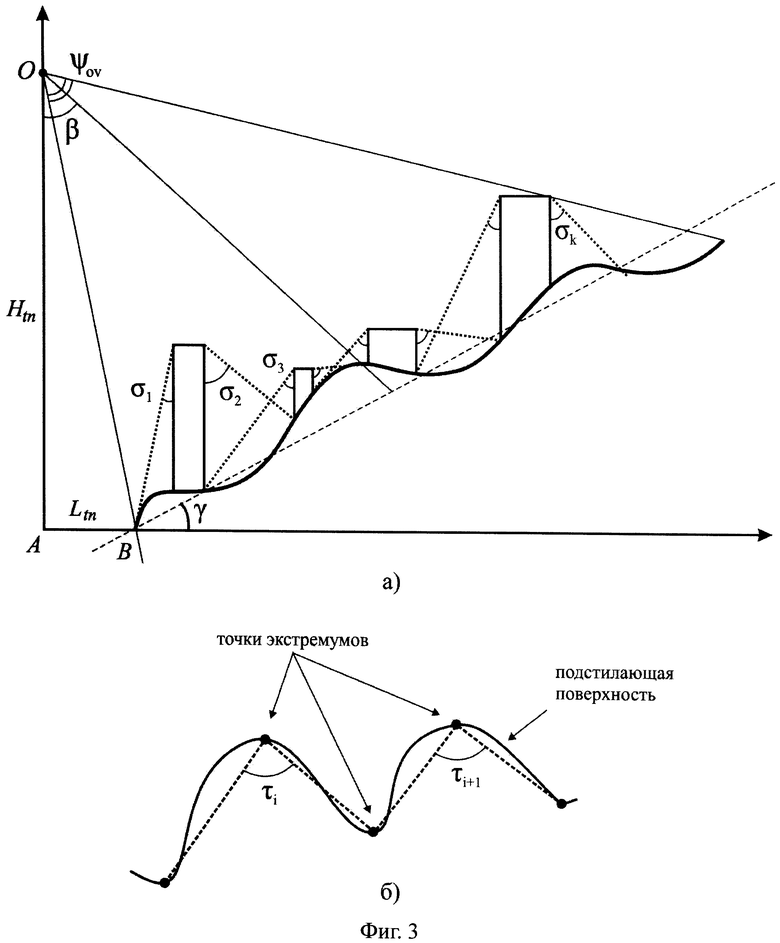
фиг.3 - Вертикальный профиль объекта картографирования;
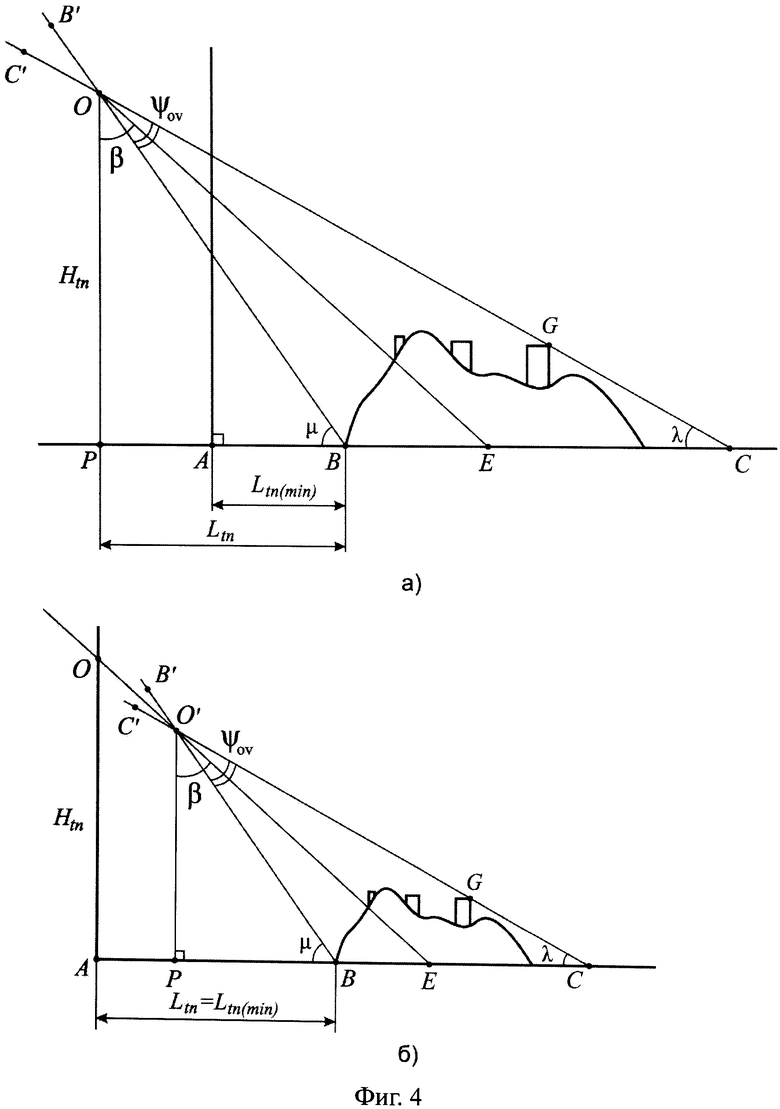
фиг.4 - Нахождение уточненных координат точки наблюдения,
где:
О, О1, О2, … On - точки наблюдения (центры проекции);
n - количество точек наблюдения;
Ψog - горизонтальный угол обзора;
Ψov - вертикальный угол обзора;
Pr1, Pr2, … Prm - профили (сечения трехмерной модели картографируемого объекта);
m - количество профилей;
Δog - угол разбиения горизонтального угла обзора на створы;
Htn, Htn1, Htn2 … Htnn - уточненные высоты точек наблюдения;
ω - угол перекрытия створов горизонтальных углов;
β - угол наклона луча наблюдения;
σ1, σ2, … σr - углы, характеризующие этажность и плотность застройки;
r - половина от количества сооружений, попавших в текущий профиль;
τi, τi+1 - углы, характеризующие изрезанность подстилающей поверхности;
γ - угол уклона подстилающей поверхности относительно горизонтальной плоскости;
Lth(min) - минимальное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшего края модели;
Lth - уточненное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшей границы профиля модели местности;
λ, µ - углы, образуемые створом вертикального угла обзора при пересечении с горизонтальной плоскостью.
Процесс построения перспективных карт по трехмерной цифровой модели местности в настоящем изобретении обозначается термином «трехмерное картографирование».
Согласно первому варианту способа построение перспективных карт местности по трехмерной цифровой модели начинается с выбора объекта картографирования и определения его границ в горизонтальной проекции. В качестве объекта картографирования выбирают трехмерную цифровую модель местности. Исходя из характеристик точности и детальности исходной трехмерной модели местности, задают установочные параметры создаваемой перспективной карты:
- метрический размер и разрешение создаваемого перспективного картографического изображения;
- систему горизонтальных и вертикальных масштабов для ближнего, среднего и дальнего планов перспективной карты;
- степень генерализации ближнего, среднего и дальнего планов перспективной карты;
- формулируют назначение перспективной карты, ее тематическую направленность и выбирают критерий оптимальности изображения картографируемого объекта в соответствии с назначением искомой перспективной карты.
Для определения наилучшего положения точки наблюдения относительно картографируемого объекта выбирают критерий оптимальности. В качестве критерия оптимальности может быть выбран, например, коэффициент Kopt, вычисляемый по формуле (1).
где Nv - количество видимых из данной точки наблюдения объектов;
Pv - видимая высота вертикальной проекции объекта картографирования;
Po - реальный вертикальный размер объекта картографирования.
Наибольшее значение этого коэффициента будет свидетельствовать о выборе наиболее оптимального положения точки наблюдения.
Выбирают горизонтальный Ψog и вертикальный ψov углы обзора. Наилучший угол зрения для изображения местности (предметов на открытом воздухе) лежит в пределах от от 28° до 37°. Выбор угла обзора в обозначенных пределах обеспечит достоверное восприятие масштабов элементов картографируемой модели и глубины пространства.
Для определения наилучшего положения точки наблюдения относительно картографируемого объекта в соответствии с выбранным критерием оптимальности строят некоторую предварительную трассу точек наблюдения - центров проецирования {О1, О2, О3, On} (фиг 1а) вокруг картографируемого объекта в горизонтальной проекции. При этом трассу точек наблюдения строят так, чтобы картографируемый объект вписываться в створы горизонтальных углов обзора Ψog, построенных из каждой точки наблюдения данной трассы. Количество и характер распределения точек наблюдения по построенной трассе определяют в зависимости от формы и размера горизонтальной проекции картографируемого объекта.
В зависимости от среднего размера элементов объекта картографирования (например, сооружений) в горизонтальной плоскости вычисляют угол разбиения горизонтального угла обзора Δog на створы (фиг.1б) по формуле:
где Do - диаметр окружности, описанной вокруг горизонтальной проекции границы картографируемого объекта;
De - средний размер значимых элементов объекта картографирования (например, сооружений) в горизонтальной плоскости, который вычисляется по формуле (3):
где k - количество элементов объектов картографирования (например, зданий);
(Se)i - площадь i-го элемента объекта картографирования.
В пределах горизонтального угла обзора Ψog каждой сцены через выбранный угол разбиения Δog строят семейство отдельных сечений (набор профилей) Pr1, Pr2, … Prm в вертикальной плоскости (фиг.1б).
Для каждого сечения выбирают угол наклона луча наблюдения β в пределах от 30°+Ψov/2 до 75°-Ψov/2, где Ψov - вертикальный угол обзора. При этом угол обзора переднего плана не будет меньше 30°, а дальнего плана больше 75°, что обеспечит сохранение информативности перспективной карты (количество видимых объектов и видимую площадь их поверхности) и повысит уровень восприятия высоты объектов на перспективной карте. Так при Ψov=28° угол β будет находиться в пределах от 44° до 61°, при Ψov=37° в пределах от 48,5° до 56,5°. При необходимости угол наклона луча наблюдения β корректируют в зависимости от уклона подстилающей поверхности относительно горизонтальной плоскости γ, а также от средней величины угла τср, характеризующей изрезанность подстилающей поверхности, и σср, характеризующей этажность и плотность застройки (фиг.3а, б). При γ>0 угол β может быть увеличен, при γ<0 уменьшен. Углы τ и σ измеряют по профилю, как показано на фиг.3а, б, и вычисляют их средние значения. При σср>52° или при τср/2>52° угол наклона оси визирования β можно увеличить в пределах 4°-8°, в противном случае уменьшить в пределах 4°-8°. При выборе слишком большого угла β в процессе проецирования модели плотно застроенной территории здания могут загораживать друг друга, что приведет к снижению информативности перспективной карты. Наоборот, для наглядного отображения рельефа местности с малым колебанием высот целесообразно выбирать небольшие значения угла β.
Уточненное положение точки наблюдения для каждого сечения находят следующим образом. Для каждого профиля определяется величина Ltn(min) - минимальное расстояние от проекции точки наблюдения на горизонтальную плоскость (от трассы точек наблюдения) до ближайшей границы модели местности (фиг.4а, б).
Из точки В (фиг.4а, б), лежащей на ближайшей к наблюдателю границе профиля модели местности, проводят луч ВВ' под углом µ к горизонтали PC. Угол µ определяется по формуле (4).
Под углом λ к горизонтали PC строят луч СС' таким образом, чтобы он касался профиля модели местности в единственной точке G (фиг.4а, б).
Угол λ вычисляется по формуле (5).
Лучи ВВ' и СС' при пересечении образуют заданный угол Ψov, а сама точка пересечения участвует в определении уточненного положение точки наблюдения в плоскости сечения модели местности.
Если проекция точки пересечения на горизонтальную плоскость лежит за пределами отрезка Lth(min) (фиг.4а), то положение точки пересечения лучей ВВ' и СС' используется в качестве уточненного положения точки наблюдения О. Уточненная высота точки наблюдения Htn при этом равна отрезку ОР, а уточненное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшей границы профиля модели местности Ltn=РВ.
Если проекция точки пересечения на горизонтальную плоскость лежит внутри отрезка Lth(min) (фиг.4б), то через точку пересечения лучей ВВ' и СС' (О') проводится прямая, разделяющая угол Ψov пополам, совпадающую с лучом наблюдения O'E. Точка пересечения построенной прямой с вертикальной прямой, проходящей через точку А, расположенной на расстоянии Ltn(min) от границы профиля модели местности, используется как уточненное местоположение точки наблюдения (О). Уточненная высота точки наблюдения Htn при этом равна отрезку ОА, а уточненное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшей границы профиля модели местности Ltn=Ltn(min) (фиг.4б).
Окончательное положение каждой точки наблюдения на построенной трассе (фиг.1в) находят путем усреднения найденных уточненных значений высоты точки наблюдения Htn и расстояния до границы профиля Ltn во всех сечениях.
Для каждой точки наблюдения строят трехмерную сцену - виртуальное трехмерное пространство, содержащее совокупность элементов трехмерной модели, попадающих в область обзора. Из всех построенных сцен выбирают одну трехмерную сцену, которая максимально удовлетворяет выбранному критерию оптимальности, например, выбирают сцену, в которой среднее значение критерия оптимальности по всем ее ранее построенным сечениям максимально, при этом точку наблюдения данной трехмерной сцены используют как центр проекции при создании искомого перспективного изображения объекта картографирования.
В заключение производят проецирование точек трехмерной сцены на плоскость и оформляют полученное перспективное изображение местности по картографическим законам в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте.
Согласно второму варианту способа построение перспективных карт местности по трехмерной цифровой модели начинается с выбора объекта картографирования и определения его границ в горизонтальной проекции. В качестве объекта картографирования выбирают трехмерную цифровую модель местности. Исходя из характеристик точности и детальности исходной трехмерной модели местности, задают установочные параметры создаваемой перспективной карты:
- метрический размер и разрешение создаваемого перспективного картографического изображения;
- систему горизонтальных и вертикальных масштабов для ближнего, среднего и дальнего планов перспективной карты;
- степень генерализации ближнего, среднего и дальнего планов перспективной карты;
- формулируют назначение перспективной карты, ее тематическую направленность и выбирают критерий оптимальности изображения картографируемого объекта в соответствии с назначением искомой перспективной карты.
Для определения наилучшего положения точки наблюдения относительно картографируемого объекта выбирают критерий оптимальности. В качестве критерия оптимальности может быть выбран, например, коэффициент Kopt, вычисляемый по формуле (6).

где Nv - количество видимых из данной точки наблюдения объектов;
Pv - видимая высота вертикальной проекции объекта картографирования;
Po - реальный вертикальный размер объекта картографирования.
Наибольшее значение этого коэффициента будет свидетельствовать о выборе наиболее оптимального положения точки наблюдения.
Выбирают горизонтальный Ψog и вертикальный Ψov углы обзора. Наилучший угол зрения для изображения местности (предметов на открытом воздухе) лежит в пределах от от 28° до 37°. Выбор угла обзора в обозначенных пределах обеспечит достоверное восприятие масштабов элементов картографируемой модели и глубины пространства.
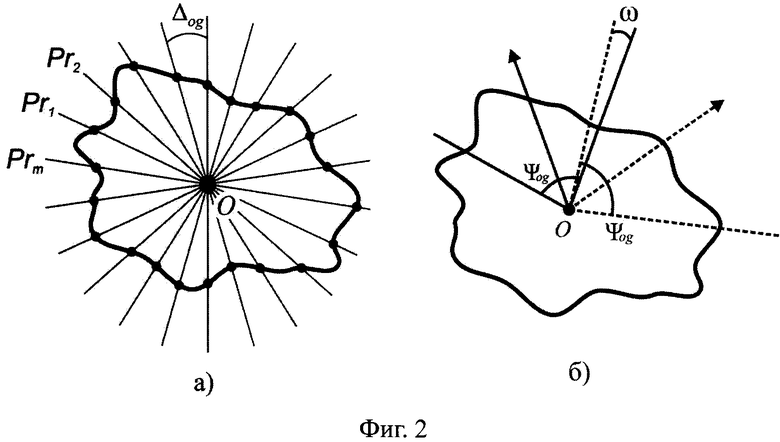
Для определения наилучшего положения точки наблюдения относительно картографируемого объекта в соответствии с выбранным критерием оптимальности выбирают предварительное положение точки наблюдения в горизонтальной проекции картографируемого объекта. Например, точку наблюдения располагают в центроиде картографируемого объекта (фиг 2а, б).
В зависимости от среднего размера элементов объекта картографирования (например, сооружений) в горизонтальной плоскости вычисляют угол разбиения картографируемого объекта в горизонтальной плоскости из точки наблюдения по кругу (фиг.2а) по формуле (7).
где Do - диаметр окружности, описанной вокруг горизонтальной проекции границы картографируемого объекта;
De - средний размер значимых элементов объекта картографирования (например, сооружений) в горизонтальной плоскости, который вычисляется по формуле (8):
где k - количество элементов объектов картографирования (например, зданий);
(Se)i - площадь i-го элемента объекта картографирования.
Делая полный оборот вертикальной плоскости сечения вокруг точки наблюдения, строят через вычисленный угол разбиения Δog отдельные вертикальные сечения (профили) трехмерной цифровой модели местности Pr1, Pr2, … Prm (фиг.2а).
Для каждого сечения выбирают угол наклона луча наблюдения β в пределах от 30°+Ψov/2 до 75°-Ψov/2, где Ψov - вертикальный угол обзора. При этом угол обзора переднего плана не будет меньше 30°, а дальнего плана больше 75°, что обеспечит сохранение информативности перспективной карты (количество видимых объектов и видимую площадь их поверхности) и повысит уровень восприятия высоты объектов на перспективной карте. Так при Ψov=28° угол β будет находиться в пределах от 44° до 61°, при Ψov=37° в пределах от 48,5° до 56,5°. При необходимости угол наклона луча наблюдения β корректируют в зависимости от уклона подстилающей поверхности относительно горизонтальной плоскости γ, а также от средней величины угла τср, характеризующей изрезанность подстилающей поверхности, и σср, характеризующей этажность и плотность застройки (фиг.3а, б). При γ>0 угол β может быть увеличен, при γ<0 - уменьшен. Углы τ и σ измеряют по профилю, как показано на фиг.3а, б, и вычисляют их средние значения. При σср>52°или при τср/2>52° угол наклона оси визирования β можно увеличить в пределах 4°-8°, в противном случае уменьшить в пределах 4°-8°. При выборе слишком большого угла β в процессе проецирования модели плотно застроенной территории здания могут загораживать друг друга, что приведет к снижению информативности перспективной карты. Наоборот, для наглядного отображения рельефа местности с малым колебанием высот целесообразно выбирать небольшие значения угла β.
Уточненное положение точки наблюдения для каждого сечения находят следующим образом. Для каждого профиля определяется величина Ltn(min) - минимальное расстояние от проекции точки наблюдения на горизонтальную плоскость (от трассы точек наблюдения) до ближайшей границы профиля модели местности.
Из точки В (фиг.4а, б), лежащей на ближайшей к наблюдателю границе профиля модели местности, проводят луч ВВ' под углом µ к горизонтали PC. Угол (определяется по формуле (9).

Под углом (к горизонтали PC строят луч СС' таким образом, чтобы он касался профиля модели местности в единственной точке G (фиг.4а, б).
Угол λ вычисляется по формуле (10).
Лучи ВВ' и СС' при пересечении образуют заданный угол Ψov, а сама точка пересечения участвует в определении уточненного положение точки наблюдения в плоскости сечения модели местности.
Если проекция точки пересечения на горизонтальную плоскость лежит за пределами отрезка Ltn(min) (фиг.4а), то положение точки пересечения лучей ВВ' и СС' используется в качестве уточненного положения точки наблюдения О. Уточненная высота точки наблюдения Htn при этом равна отрезку ОР, а уточненное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшей границы профиля модели местности Ltn=РВ.
Если проекция точки пересечения на горизонтальную плоскость лежит внутри отрезка Ltn(min) (фиг.4б), то через точку пересечения лучей ВВ' и СС' (О') проводится прямая, разделяющая угол ψov пополам, совпадающую с лучом наблюдения O'E. Точка пересечения построенной прямой с вертикальной прямой, проходящей через точку А, расположенной на расстоянии Ltn(min) от границы профиля модели местности, используется как уточненное местоположение точки наблюдения (О). Уточненная высота точки наблюдения Htn при этом равна отрезку ОА, а уточненное расстояние от проекции точки наблюдения на горизонтальную плоскость до ближайшей границы профиля модели местности Ltn=Ltn(min) (фиг.4б).
Находят окончательное положение точки наблюдения в плане и по высоте путем усреднения уточненных положений точек наблюдения, найденных для каждого сечения.
Для построения и последующей визуализации трехмерных сцен разбивают горизонтальную проекцию картографируемого объекта на сектора, образованные горизонтальным углом обзора, построенным из точки наблюдения (фиг.2б). При этом соблюдают перекрытие створов горизонтальных углов обзора 60%, то есть угол перекрытия со будет вычисляться по формуле (11).

Такая величина перекрытия обеспечит корректное построение круговой панорамы картографируемого объекта на основе серии изображений, полученных при визуализации трехмерных сцен.
Для каждого сектора строят трехмерную сцену, содержащую совокупность элементов трехмерной модели, попадающих в область обзора, при этом точку наблюдения используют как центр проекции при создании перспективных изображений для всех секторов. Производят построение серии перспективных изображений для каждого сектора и производят их сшивку в искомую перспективную панораму картографируемого объекта.
Полученное перспективное панорамное изображение оформляют в виде перспективной карты по картографическим законам в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте.
По первому и второму варианту способа в случае, когда требуется наиболее выгодным образом показать особо важные элементы картографируемого объекта, в процесс определения оптимальности изображения картографического объекта вводят систему весовых коэффициентов. При этом каждому элементу трехмерной модели (например, каждому зданию) присваивают весовой коэффициент, а в формулу расчета коэффициента оптимальности добавляют весовой коэффициент элемента.
Например, формула расчета коэффициента оптимальности (1, 6) с учетом взвешивания элементов может иметь вид:
где Pv - видимая высота вертикальной проекции объекта картографирования;
Po - реальный вертикальный размер объекта картографирования;
Nv - количество видимых из данной точки наблюдения объектов;
Vi - весовой коэффициент i-го элемента объекта картографирования.
Интенсивное развитие и внедрение компьютерных технологий в картографию требует переосмысления и адаптации к новым возможностям традиционных методических решений и подходов. Одним из таких направлений, требующих разработки новых научно-методических основ, является построение и визуализация перспективных картографических изображений на основе созданных трехмерных моделей и применение трехмерных графических редакторов.
Особая актуальность этой тематики обусловлена «взрывной» тенденцией перехода к трехмерному моделированию и представлению окружающего нас геопространства. Многочисленные программные средства геоинформационных систем (ГИС), систем автоматизированного проектирования (САПР), трехмерной машинной графики предоставляют широкие возможности для автоматизированного формирования перспективных изображений трехмерного мира.
Одним из основных преимуществ перспективных карт является формирование у пользователя максимально достоверного представления об изображенных на ней объектах местности. Перспективная карта, по сравнению с традиционной картой, способна обеспечить высокую степень узнаваемости изображенных на не объектов при ориентировании на местности. Поэтому перспективные карты могут найти свое применение в различных областях человеческой деятельности.
Перспективная карта должна быть наглядной - обеспечивать достоверное представление об изображенных на ней объектах, их взаимном расположении, а также информативной - содержать наиболее полную информацию об объектах в соответствии с ее тематикой. Однако в связи с особенностями центрального перспективного проецирования, на карте, построенной таким способом, неизбежны визуальные перекрытия объектов, то есть наложения их проекций. Так, например, перекрытие обзора нескольких объектов одним более крупным может существенно ухудшить наглядность и информативность перспективной карты.
На изменение площади перекрытия проекции объектов и общего числа видимых объектов оказывает влияние расположение точки наблюдения (центра перспективной проекции) в трехмерном пространстве относительно проецируемого объекта. Кроме того, перспективные карты, построенные из разных точек наблюдения, будут с различной степенью эффективности отображать объекты, обладающие определенной тематической значимостью. Поэтому изменение положения точки наблюдения влияет не только на количество видимых объектов и их площадь проекции, но и на тематическую направленность получаемой перспективной карты.
Таким образом, задача вычисления оптимального положения точки наблюдения является одной из наиболее значимых при достижении наиболее выгодного отображения трехмерного картографируемого объекта на плоскости. При этом оптимальность положения точки наблюдения должна определяться на основе критерия оптимальности, выбираемого в соответствии с тематической направленностью получаемого перспективного изображения.
Изобретение относится к области обработки и отображения пространственной информации. Техническим результатом является расширение функциональных возможностей за счет нахождения оптимального положения центра проекции (точки наблюдения) при создании перспективной карты на основе трехмерной цифровой модели. В способе построения перспективных карт по трехмерной цифровой модели местности, включающем центральное проецирование точек трехмерной цифровой модели местности пучком лучей на плоскость, выбирают объект картографирования в виде трехмерной цифровой модели местности и определяют его границы в горизонтальной проекции, задают установочные параметры создаваемой перспективной карты, выбирают критерий оптимальности перспективного отображения объекта картографирования, задают значение горизонтального и вертикального угла обзора, строят некоторую предварительную трассу точек наблюдения вокруг картографируемого объекта в горизонтальной проекции таким образом, чтобы картографируемый объект вписывался в створы горизонтальных углов обзора. 2 н. и 2 з.п. ф-лы, 4 ил.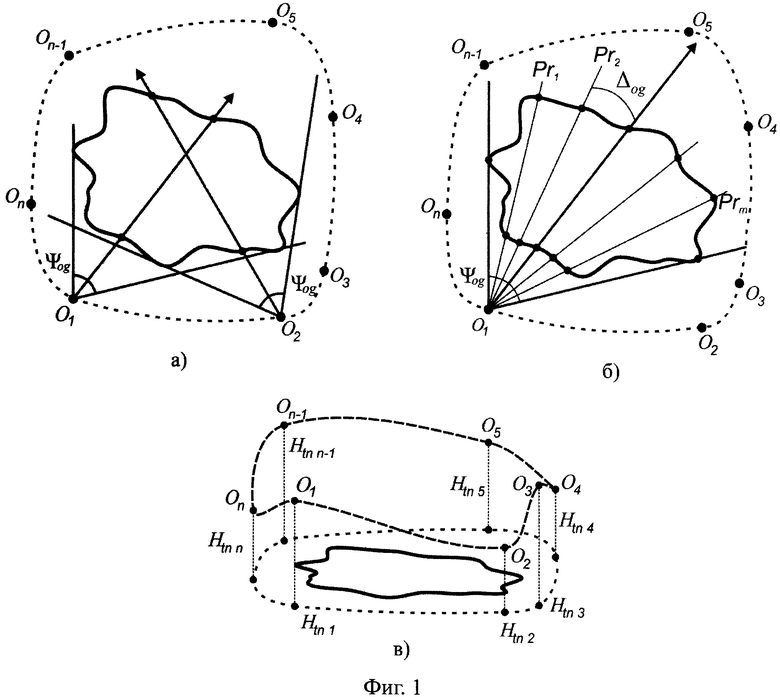
1. Способ построения перспективных карт по трехмерной цифровой модели местности, включающий центральное проецирование точек трехмерной цифровой модели местности пучком лучей на плоскость, отличающийся тем, что перед проецированием точек трехмерной модели выбирают объект картографирования в виде трехмерной цифровой модели местности и определяют его границы в горизонтальной проекции, задают установочные параметры создаваемой перспективной карты, выбирают критерий оптимальности перспективного отображения объекта картографирования, задают значение горизонтального и вертикального угла обзора, строят некоторую предварительную трассу точек наблюдения (центров проецирования) вокруг картографируемого объекта в горизонтальной проекции таким образом, чтобы картографируемый объект вписывался в створы горизонтальных углов обзора, построенных из каждой точки наблюдения на трассе, при этом определяют количество и характер распределения точек наблюдения по построенной трассе в зависимости от формы горизонтальной проекции картографируемого объекта, вычисляют угол разбиения горизонтального угла обзора на створы в зависимости от среднего размера горизонтальной проекции элементов объекта картографирования, строят для каждой точки наблюдения семейство отдельных вертикальных сечений (профилей) трехмерной цифровой модели местности в пределах горизонтального угла обзора через выбранный угол разбиения, определяют для каждого сечения угол наклона луча наблюдения в зависимости от высоты и плотности застройки, изрезанности рельефа и заданного критерия оптимальности обзора картографируемого объекта, определяют уточненное положение точки наблюдения для каждого сечения, находят окончательное положение каждой точки наблюдения на построенной трассе путем усреднения найденных оптимальных значений высоты точки наблюдения во всех сечениях, строят для каждой точки наблюдения трехмерную сцену, содержащую совокупность элементов трехмерной модели, попадающих в область обзора, выбирают из всех построенных сцен одну трехмерную сцену, максимально отображающую объект картографирования (в соответствии с заданным критерием оптимальности), например, сцену в которой средняя величина критерия оптимальности по всем ее ранее построенным сечениям максимальна, при этом точку наблюдения данной трехмерной сцены используют как центр проекции при создании искомого перспективного изображения объекта картографирования, оформляют полученное перспективное изображение в виде перспективной карты в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте.
2. Способ по п.1, отличающийся тем, что вводят в процесс определения оптимальности изображения картографического объекта систему весовых коэффициентов в случаях, когда требуется наиболее выгодным образом показать особо важные элементы картографируемого объекта, при этом каждому элементу трехмерной модели присваивают весовой коэффициент, а в формулу расчета коэффициента оптимальности вводят сумму весовых коэффициентов всех элементов картографируемого объекта, видимых из данной точки наблюдения.
3. Способ построения перспективных карт по трехмерной цифровой модели местности, включающий центральное проецирование точек трехмерной цифровой модели местности пучком лучей на плоскость, отличающийся тем, что перед проецированием точек трехмерной модели выбирают объект картографирования в виде трехмерной цифровой модели местности и определяют его границы в горизонтальной проекции, задают установочные параметры создаваемой перспективной карты, выбирают критерий оптимальности перспективного отображения объекта картографирования, задают значение горизонтального и вертикального угла обзора, выбирают предварительное положение точки наблюдения в горизонтальной проекции картографируемого объекта, например, точку наблюдения располагают в центроиде картографируемого объекта, вычисляют угол разбиения картографируемого объекта в горизонтальной плоскости из точки наблюдения по кругу в зависимости от среднего размера горизонтальной проекции элементов объекта картографирования, строят из точки наблюдения через вычисленный угол разбиения отдельные вертикальные сечения (профили) трехмерной цифровой модели местности, определяют для каждого сечения угол наклона луча наблюдения в зависимости от высоты и плотности застройки, изрезанности рельефа и заданного критерия оптимальности обзора картографируемого объекта, находят окончательное положение точки наблюдения в плане и по высоте путем усреднения уточненных положений точек наблюдения, найденных для каждого сечения, разбивают горизонтальную проекцию картографируемого объекта на сектора, образованные горизонтальным углом обзора, построенным из точки наблюдения, при этом соблюдают перекрытие створов горизонтальных углов обзора 60%, строят для каждого сектора трехмерную сцену, содержащую совокупность элементов трехмерной модели, попадающих в область обзора, при этом точку наблюдения используют как центр проекции при создании перспективных изображений для всех секторов, производят построение перспективных изображений для каждого сектора и производят сшивку полученных отдельных изображений в искомую перспективную панораму картографируемого объекта, оформляют полученное перспективную панорамное изображение в виде перспективной карты в соответствии с выбранными установочными параметрами, а также требованиями, предъявляемыми к искомой перспективной карте.
4. Способ по п.3, отличающийся тем, что вводят в процесс определения оптимальности изображения картографического объекта систему весовых коэффициентов в случаях, когда требуется наиболее выгодным образом показать особо важные элементы картографируемого объекта, при этом каждому элементу трехмерной модели присваивают весовой коэффициент, а в формулу расчета коэффициента оптимальности вводят сумму весовых коэффициентов всех элементов картографируемого объекта, видимых из данной точки наблюдения.
| СПОСОБ ГЕНЕРИРОВАНИЯ СТРУКТУРЫ УЗЛОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ПРЕДСТАВЛЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИЗОБРАЖЕНИЙ С ГЛУБИНОЙ | 2002 |
|
RU2237284C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2002 |
|
RU2204853C1 |
| УРОВЕНЬ ИНТЕГРАЦИИ СРЕД | 2004 |
|
RU2360275C2 |
| US 6151118 А, 21.11.2000 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Экономайзер | 0 |
|
SU94A1 |

