Изобретение относится к областям радиолокации, радионавигации и радиосвязи и может быть использовано при полунатурном моделировании многолучевого распространения радиоволн в каналах воздух-поверхность и воздух-воздух с учетом отражений от поверхности путем обеспечения имитации радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в качестве которой выступают фрагменты земной поверхности с различной степенью шероховатости (рельеф, водные поверхности, растительные покровы и искусственные объекты), а также движущиеся цели на фоне земной поверхности, с учетом параметров зондирующего радиосигнала, в реальном времени.
Исследования показывают, что вопросам имитации эхо-сигналов посвящено большое количество работ, однако практически все они описывают процесс формирования радиосигнала, отраженного от отдельных целей без учета подстилающей поверхности [1], [2], [3], [4], [5], либо используют тестовые сигналы, отраженные от протяженных объектов, в том числе и от земной поверхности со случайным рельефом, без учета особенностей строения рельефа облучаемых участков поверхности [6].
В изобретении [7] авторами предпринята попытка повышения степени адекватности имитируемых радиолокационных сигналов, отраженных от земной поверхности, за счет введения коэффициентов отражения в зависимости от угла падения для каждого типа поверхности. Недостатком данного способа является конечное число подготовленных фрагментов местности и, как следствие, невозможность физического формирования адекватного радиолокационного сигнала, отраженного от выбранного участка земной поверхности, в режиме моделирования произвольного полета носителя РЛС.
Известен имитатор источников радиосигналов [8], позволяющий имитировать сложную радиотехническую обстановку и задавать детерминированное или случайным образом определенное количество лучей, значения для задержек доплеровских сдвигов частоты, замираний. Однако данное устройство не позволяет формировать радиосигналы при моделировании движений по реальным трассам в трехмерных моделях реальных условий и обстановок.
Известны также наиболее распространенные в настоящее время в авиации системы визуализации полета в реальном масштабе времени, основанные на использовании специализированных графических компьютеров и предназначенные для формирования и анализа изображения поверхности, текстуры и различных объектов на их фоне [9], [10], позволяющие получать изображения с требуемой степенью адекватности реальным, функциональные и технические возможности которых не позволяют производить последующий синтез радиосигнала, отраженного от выбранного типа подстилающей поверхности.
В качестве прототипа выбран способ [11], комбинирующий визуальную и радиолокационную имитационные системы и заключающийся в последовательной генерации визуального образа поверхности, используя базы географических данных и сведений о типе покрова и местоположении искусственных объектов, нахождении области освещения данной поверхности радиолокационными средствами и имитации радиолокационного портрета в режимах высокого и низкого разрешения в реальном времени.
Однако данный способ обладает существенным недостатком, заключающимся в отсутствии возможности синтеза радиосигнала, отраженного от выбранного участка поверхности.
Сложность задачи синтеза отраженного радиосигнала, адекватного реальной обстановке, для областей радиолокации и радиосвязи заключается в том, что искомый сигнал является суперпозицией сотен тысяч-миллионов парциальных эхо-сигналов вторичных излучений поверхности земли и различных искусственных объектов, представляющих собой, с точки зрения процессов взаимодействия с ними электромагнитных полей, трехмерную динамическую радиофизическую сцену. Взаимодействие электромагнитных волн с элементами радиофизической сцены инвариантно для различных радиотехнических систем, что и позволяет говорить о возможности единого подхода к способу имитации радиосигналов различных радиотехнических систем в сложных многолучевых радиоканалах.
При этом необходимая, в частности для радиолокационных систем с когерентной обработкой и синтезированной апертурой антенны, точность синтеза составляет, как минимум, десятые доли градуса по фазе для каждого парциального сигнала в динамике реального времени полета самолета и целей.
Задача изобретения заключается в разработке способа формирования радиосигнала вторичного многолучевого излучения в сложных динамических трехмерных радиофизических сценах с требуемыми параметрами разрешения, в реальном времени, инвариантного параметрам излучаемых радиосигналов.
Под реальным временем, при синтезе имитируемого радиосигнала, мы будем понимать такие временные задержки, которые не оказывают влияния на режимы и характеристики функционирования радиотехнических систем при обработке синтезированного сигнала.
При этом данный способ должен позволить формировать эхо-сигналы с учетом метеоусловий, рефракции, зон затенения, отраженные от различных типов поверхности, например бетон, асфальт, песок, различный грунт, травяной покров, лесные массивы, водоемы, снег, лед, искусственных объектов, расположенных на фоне выбранного земного покрова, воздушных объектов на фоне земной поверхности, а также наземных и воздушных подвижных объектов.
Исходными для поставленной задачи данными являются сведения о требуемых параметрах разрешения, параметрах движения носителей антенн, положении антенн, а также фацетная модель полигона, привязанная к географическим координатам.
Подготовка полигона проводится при помощи программного обеспечения с использованием матриц высот над уровнем моря и векторных слоев покровов. На фиг.1 схематически представлена структура модели местности с учетом последовательности введения отдельных слоев, значимых для формирования радиосигнала.
При этом результирующее поле рассеяния определяется как суперпозиция полей, созданных отдельными слоями. Использование такой модели позволяет уменьшить временные затраты за счет того, что при внесении изменений в моделируемые условия повторную обработку потребуется выполнить лишь для одного или нескольких слоев.
Следует отметить, что при выделении отдельного слоя используется принцип маскирования, например, слой рельефа образован не всей поверхностью картографируемой области, а лишь той ее частью, на которой нет относящихся к другим слоям объектов, за исключением динамических. Такое исключение обусловлено тем, что вследствие перемещения динамических объектов слой рельефа будет подвергаться изменениям, что делает бессмысленным его выделение в самостоятельный слой.
Для решения поставленной задачи механизм формирования отраженного сигнала предлагается представить как прохождение радиосигнала через линейную систему с распределенными параметрами. Тогда процесс получения отраженного сигнала будет обеспечиваться путем свертки радиосигнала с импульсной характеристикой поверхности рассеивания, рассчитанной для последовательности фиксированных моментов времени в соответствии с исходными условиями моделирования.
При этом поверхность рассеивания аппроксимируется совокупностью шероховатых пластин-фацетов (см. фиг.2), средний уровень мелких неровностей которых совпадает с поверхностью крупных (сглаженных) неровностей.
Тогда результирующий эхо-сигнал можно выразить как суперпозицию парциальных сигналов отдельных фацетов, каждый из которых равен радиосигналу, задержанному на время распространения от передающей антенны до фацета плюс от фацета до приемной антенны и умноженному на некоторую комплексную величину.
В основе предлагаемого способа лежит принцип сортировки упорядоченных по возрастанию квантованных задержек распространения парциальных сигналов фацетов. При этом считается, что в фиксированные моменты времени, в точке расположения приемной антенны, одновременно присутствуют парциальные сигналы группы фацетов, разница задержек распространения которых не превышает половину величины разрешающей способности приемного устройства при условии, что фацеты находятся в зоне видимости со стороны передающей и приемной антенн одновременно. Поэтому принимается, что задержки распространения парциальных сигналов таких фацетов можно считать одинаковыми. Следует отметить, что проведенное квантование задержек приводит к погрешности формируемого сигнала. При этом величина коэффициента взаимной корреляции с сигналом, рассчитанным без квантования задержек, составляет порядка девяносто пяти процентов.
Выражение для эхо-сигнала представляется в следующем виде:
где N число групп фацетов с одинаковыми задержками распространения;
tdn - время задержки сигнала, соответствующее n-й группе.
Комплексные множители  , по сути, совпадают с конечной импульсной характеристикой длиной N отсчетов дискретного фильтра. Таким образом, имитируемый эхо-сигнал фактически представляет собой свертку излучаемого радиосигнала с последовательностью дискретных отсчетов импульсной характеристики поверхности рассеивания, совпадающей с последовательностью импульсных характеристик групп облучаемых фацетов, при условии, что расстояние между соседними отсчетами импульсной характеристики облучаемого участка поверхности не превышает половину величины разрешающей способности приемного устройства.
, по сути, совпадают с конечной импульсной характеристикой длиной N отсчетов дискретного фильтра. Таким образом, имитируемый эхо-сигнал фактически представляет собой свертку излучаемого радиосигнала с последовательностью дискретных отсчетов импульсной характеристики поверхности рассеивания, совпадающей с последовательностью импульсных характеристик групп облучаемых фацетов, при условии, что расстояние между соседними отсчетами импульсной характеристики облучаемого участка поверхности не превышает половину величины разрешающей способности приемного устройства.
На фиг.3 приведен пример картографирования в режиме низкого разрешения. Луч локатора шириной δφ* последовательно переключается с 1-q по N-ю угловую позицию. Размеры элемента разрешения по азимуту (δφ*) и по дальности (Δt/2) определяются шириной луча и длительностью импульса.
На фиг.4 приведен пример картографирования в режиме высокого разрешения (режим с синтезированной апертурой) для одного углового положения антенны и движения самолета по прямой с постоянной скоростью. В этом случае размеры элемента разрешения по азимуту определяются характерными размерами отдельного фацета, из которых смоделирована область взаимодействия ДНА РЛС с подстилающей поверхностью (за счет появления доплеровского сдвига частоты отраженного сигнала от каждого фацета, возникающего за счет движения самолета).
Механизм распространения радиосигнала представляется следующим образом. Последовательность когерентных радиоимпульсов, каждый из которых длительностью τu, через время tmin достигает начала картографируемой площадки S и через время t3min поступает на приемное устройство локатора. В результате последовательного приращения облучаемой площадки S0(t) в приемном устройстве формируется результирующий сигнал.
По достижению радиуса Dmax площадка S0(t) выходит из зоны энергетической значимости луча и сигнал затухает.
При моделировании отраженного сигнала используется участок времени в интервале [tmin, tmax], при этом каждый дискретный отсчет отраженного сигнала в любой момент времени совпадает со значениями сигнала, отраженного от группы одновременно облучаемых фацетов площадки S0(t).
В режиме воздух-воздух, когда происходит движение носителей приемной и передающей антенн (см. фиг.5) и учитывается многолучевой характер распространения переданного радиосигнала, обусловленный мешающими отражениями от поверхности, механизм взаимодействия радиосигнала с рассеивающей поверхностью моделируется следующим образом. В этом случае область взаимодействия ДН-антенн с поверхностью разбивается на совокупность концентрических слоев, границы которых определяются исходя из условия о равенстве сумм расстояний от передающей антенны до фацета R1 и от фацета до приемной антенны R2, а ширина определяется разрешающей способностью приемного устройства. При этом считается, что в любой момент времени на входе приемной антенны одновременно будут присутствовать парциальные сигналы фацетов, находящихся внутри одного слоя. Сортировка фацетов по слоям выполняется исходя из значения суммы расстояний от передающей антенны до фацета и от фацета до приемной антенны.
Поле рассеяния от группы облучаемых фацетов представляется в виде геометрической суммы полей, рассеянных отдельными разно наклоненными фацетами
где N - число фацетов в группе.
Тогда суммарное поле рассеяния выражается в следующем виде:
где  (i,j=в,г) - матрица рассеяния группы фацетов;
(i,j=в,г) - матрица рассеяния группы фацетов;
 - соответствующий элемент матрицы рассеяния шероховатого фацета.
- соответствующий элемент матрицы рассеяния шероховатого фацета.
Каждый элемент данной матрицы представляет собой комплексную величину, зависящую от свойств фацета, его ориентации к направлениям облучения и приема, определяемой вектором нормали n0 к фацету, а также от расстояния между фацетом и точкой приема R0k (см. Фиг.6).
Здесь О - центр системы отчета, связанной с положением передающей антенны;
Е - вектор напряженности электрического поля падающей волны;
k01 - вектор, характеризующий направление падающей волны;
υфk - угол падения луча на фацет (между направлением падающей волны и вектором нормали к плоскости фацета);
ρфk - угол между вектором напряженности электрического поля падающей волны
Е и плоскостью фацета.
В основу описания фацетов входят следующие ограничения:
- размеры фацета выбираются таким образом, чтобы размеры элемента разрешения по дальности и по азимуту не менее чем в два раза превышали характерные размеры фацета;
- размеры фацета много больше длины облучающей волны;
- высота мелких неровностей фацета меньше длины облучающей волны;
- расстояние пространственной корреляции неровностей фацета, характеризующее изменения высоты мелких и крупных неровностей по поверхности фацета, существенно меньше размеров фацета;
- закон распределения мелких и крупных неровностей по всей поверхности фацета принимается нормальным;
- средняя высота мелких неровностей совпадает с поверхностью крупных, сглаженных неровностей, а средней поверхностью крупных неровностей является плоская поверхность фацета;
- дисперсии крупных и мелких неровностей равны соответственно  и
и  , причем
, причем  много больше
много больше  .
.
Корреляционные функции мелких и крупных неровностей изотропны и определяются следующей формулой:
 ,
,
т.е. используется гауссовская кривая, причем интервал корреляции крупной шероховатости lh1 значительно больше интервала корреляции мелкой шероховатости lh2.
Матрицу рассеяния отдельного фацета [12] можно записать в следующем виде:
где R0k - расстояние от точки приема до центра соответствующего фацета;
Sрk - площадь фацета;
σijk - значения удельной ЭПР отдельного фацета.
Следует отметить, что рассеивающие свойства фацета определяются типом рассеивающей поверхности, поэтому для вычисления значений удельной ЭПР каждого фацета выбирается своя модель рассеяния, зависящая от диэлектрических свойств поверхности и характерных размеров мелких и крупных неровностей.
Элементы матрицы рассеяния группы облучаемых фацетов  , после соответствующих преобразований в элементы матрицы эффективной длины по формуле
, после соответствующих преобразований в элементы матрицы эффективной длины по формуле
где R0 - среднее расстояние до фацетов группы, фактически представляют собой частотные характеристики группы фацетов, из которых, с помощью обратного преобразования Фурье, получаются комплексные отсчеты импульсной характеристики группы облучаемых фацетов.
Результирующая импульсная характеристика поверхности рассеивания представляет собой последовательность дискретных отсчетов во времени, фактически совпадающих с последовательностью импульсных характеристик групп облучаемых фацетов.
На примере задачи радиолокационного картографирования Земной поверхности движущейся БРЛС было проведено численное моделирование, по результатам которого был получен массив отсчетов отраженного сигнала. При этом параметры БРЛС и картографируемой поверхности были следующие. Высота носителя БРЛС над поверхностью Земли задавалась равной 5000 м. Углы раскрыва антенны в азимутальной и угломестной плоскостях были равны 4,5 градусов. Размеры картографируемой области в режиме низкого разрешения по дальности составляли порядка 47 км, по азимуту порядка 64,5 км (74 градуса). При этом количество угловых положений антенны было равно 159, угол между соседними угловыми положениями равен 0,468 градуса. Характерные размеры фацетов, с помощью которых моделировалась область взаимодействия радиолуча с поверхностью Земли, составляли порядка 90 м. Размеры элемента разрешения в данном режиме были равны 200×4000 м.
Размеры картографируемой области в режиме высокого разрешения по дальности составляли порядка 7,5 км, по азимуту порядка 3 км, количество угловых положений антенны было равно 1. Угол азимута области картографирования относительно линии движения в начальный момент времени составлял 15 градусов, а дальность до центра области - 46 км. Полигонная модель поверхности строилась по матрице высот рельефа с учетом слоев водного и лесного покровов. Линейные размеры фацетов были вдвое меньше разрешающей способности БРЛС и составляли порядка 7,5 м.
Алгоритм способа формирования радиолокационного сигнала обеспечивался последовательностью следующих действий:
1. В зависимости от выбранного режима картографирования (с высоким, низким или средним разрешением) подгружались файлы фацетной модели испытательного полигона с требуемыми параметрами дискретизации, в данном случае состоящей из слоев рельефа и естественных покровов.
2. Задавалась программа полета носителя БРЛС с указанием узловых точек начала и окончания режима картографирования либо выбирался полет под управлением оператора (по произвольной программе).
3. По координатам положения самолета и центральной точки сканируемой области в момент начала картографирования рассчитывались вертикальный и горизонтальный углы положения антенны.
4. С помощью методов последовательного приближения находились границы области взаимодействия диаграммы направленности антенны БРЛС с подстилающей поверхностью для одной угловой позиции.
5. Создавался массив фацетов, значимых для последующего формирования отраженного радиосигнала. При этом считалось, что фацет не дает вклада в результирующий эхо-сигнал при выполнении одного из следующих условий:
- угол падения облучающей волны превышает 90°;
- фацет находится в области тени другого фацета;
- уровень ДН антенны БРЛС в направлении на фацет меньше порогового значения.
Следует отметить, что для выполнения режима реального времени определение области тени и уровня диаграммы направленности осуществлялось табличным методом, при помощи вычислений угломестной и азимутальной координат фацета в системе координат антенны, после чего для выявления области тени проводилась последовательная проверка координат каждого фацета с последующей группировкой на зоны, внутри которых должны попадать фацеты, потенциально затеняющие друг друга. Затем внутри каждой зоны производилась проверка на соблюдение условий затенения в соответствии с принципами геометрической оптики, а именно прямолинейного распространения излучения.
6. Производилось вычисление угла падения зондирующего радиосигнала на фацет и удельной ЭПР для каждого значимого фацета.
7. В соответствии с заданным режимом картографирования и принципом сортировки область взаимодействия ДНА с поверхностью разбивалась на последовательность групп одновременно облучаемых фацетов.
8. Для каждой группы, с учетом задержек парциальных сигналов фацетов, их доплеровских смещений частоты, затуханий, производился расчет комплексных коэффициентов рассеивания фацетов, находилась их векторная сумма и вычислялось обратное преобразования Фурье от полученных сумм.
9. Для всей области взаимодействия ДНА с подстилающей поверхностью производилась свертка зондирующего сигнала с последовательностью отсчетов импульсных характеристик групп одновременно облучаемых фацетов.
Реализация способа формирования радиолокационного сигнала в режиме реального времени основана на сопровождении антенной БРЛС центральной точки области сканирования [13]. Вследствие этого изменение импульсной характеристики поверхности рассеивания за время движения БРЛС в процессе накопления отраженного сигнала по одной угловой позиции состоит в изменении средней задержки распространения, обусловленной средней длиной пути от антенны до группы одновременно облучаемых фацетов и обратно и доплеровских смещений частоты фацетов. Таким образом, при формировании отсчетов отраженного сигнала для каждого последующего зондирующего импульса происходило выполнение пунктов 8-9, пока антенна БРЛС не переключалась в следующую угловую позицию, после чего появлялась необходимость в выполнении пунктов 4-9.
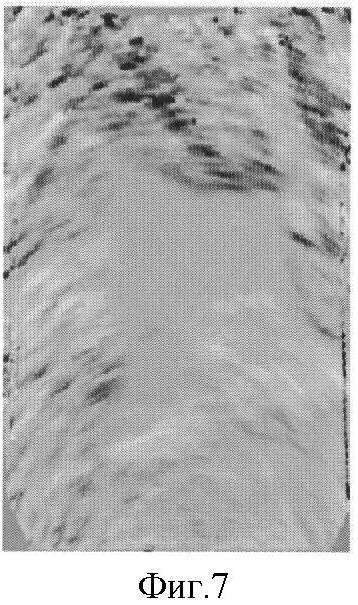
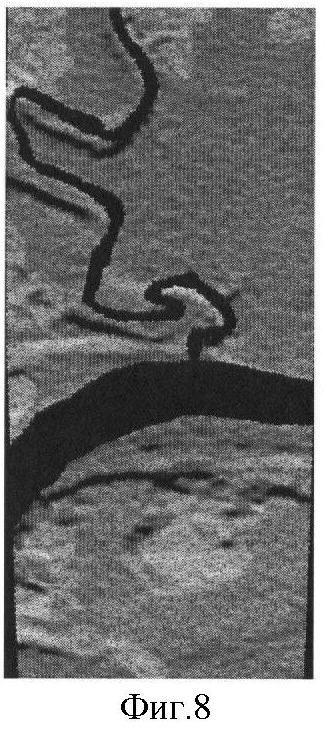
С использованием полученного в результате моделирования массива отсчетов сигнала вторичного излучения было построено радиолокационное изображение используемого фрагмента земной поверхности с низким и высоким разрешением (фиг.7 и фиг.8 соответственно).
На представленных изображениях видны соответствующая реальной структура рельефа земной поверхности (фиг.7 и фиг.8) и границы областей с различными электрофизическими параметрами (фиг.8).
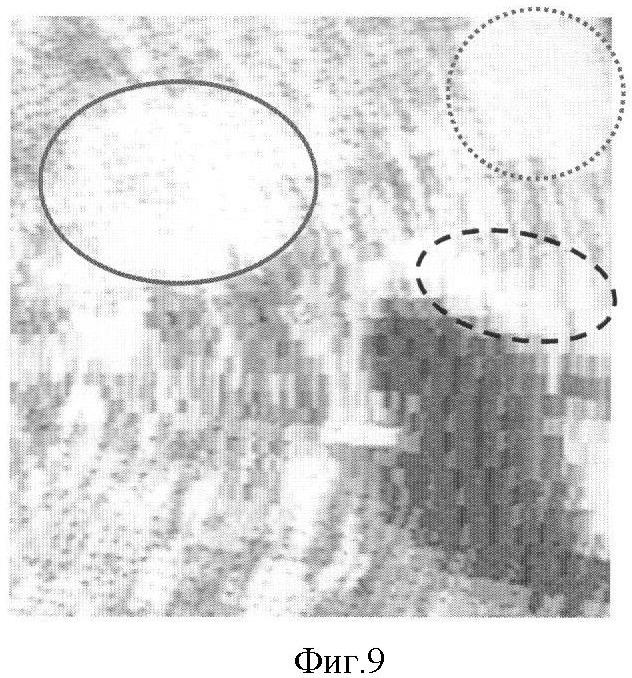
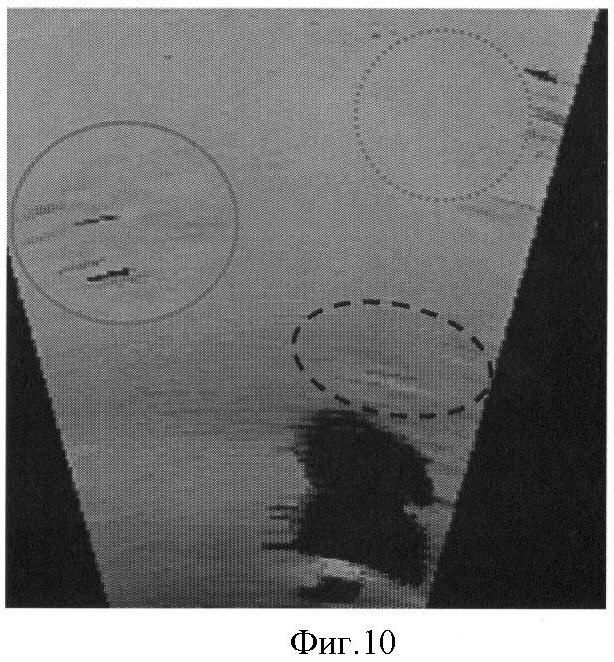
Для оценки адекватности предложенного способа были проведены сравнительные исследования радиолокационного изображения, полученного при помощи натурных испытаний (см. фиг.9 - картографирование района оз. Баскунчак), и радиолокационного изображения, синтезированного при помощи предложенного способа в режиме низкого разрешения (фиг.10). При этом в качестве исходных данных по поверхности использован слой рельефа с наложением водного покрова (растительность, засоленность почвы и другие диэлектрические особенности поверхности этого района при моделировании не учитывались).
Более резкие очертания озера на фиг.9 объясняются наличием солевых отложений вдоль береговой линии. Различия в градации цвета, определяющего прибрежный рельеф (отмеченные на фиг.9 и фиг.10 низменности), можно объяснить присутствием на фиг.9 растительности и, следовательно, более резко выраженными перепадами, вызванными не просто рельефом поверхности (фиг.10), но и различными диэлектрическими свойствами.
Приведенное описание способа формирования радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в реальном времени, по мнению авторов предлагаемого изобретения, показывает, что предлагаемый способ позволяет существенно расширить технические возможности известных технологий виртуальной реальности путем физического синтеза отраженного радиосигнала. Существенным достоинством предлагаемого способа является единый подход к реализации задачи синтеза отраженного радиосигнала для областей радиолокации (режим воздух-поверхность) и радиосвязи в многолучевых задачах (режимы самолет-самолет, земля-самолет, город).
Источники информации
1. Имитатор радиолокационных сигналов // Патент РФ № 42327, МПК G01S 13/00, 2004.07.19.
2. Имитатор радиолокационной обстановки // Патент РФ № 52196, МПК G01S 7/40 (2006.01), 2005.09.29.
3. Имитатор бортовой навигационной радиолокационной станции // Патент РФ № 580534, МПК G01S 9/04, 1963.03.07.
4. Устройство для имитации отраженных радиолокационных сигналов // Патент РФ № 1723543, МПК G01S 7/40, 1990.02.08.
5. Имитатор радиолокационных сигналов // Патент РФ № 2066459, МПК G01S 7/40, 1982.06.28.
6. Имитатор сигналов радиолокационной станции // Патент РФ № 529437, МПК G01S 7/40, 1975.06.16.
7. Устройство имитации радиолокационных сигналов, отраженных от земной поверхности // Патент РФ № 474508, МПК G01S 7/40, 1973.06.04.
8. Имитатор источников радиосигналов // Патент РФ № 2094815, МПК G01S 7/40, 1994.10.08.
9. Имитатор визуальной обстановки авиационного тренажера // Патент РФ № 50032, МПК G09B 9/08, 2004.02.20.
10. Способ генерирования текстуры в реальном масштабе времени и устройство для его реализации // Патент РФ № 2295772, МПК G06T 11/60 (2006.01), 2005.09.26.
11. Radar simulation for use with a visual simulator // Patent US N 5192208, G09B 9/00, 1993.03.09.
12. Ю.В.Киселева, A.H.Кренев. Исследование отражений от земной поверхности методом математического моделирования. Сборник докладов VII Международной научно-технической конференции «Радиолокация Навигация Связь». Том 3, Воронеж, 24-26 апреля 2001 г.
13. Ю.В.Киселева, А.Н.Кренев, Анализ влияния движения носителя БРС на качество формирования кадра радиоизображения в режиме картографирования. Вестник Ярославского зенитного ракетного института противовоздушной обороны: Сборник научных трудов / ЯЗРИ ПВО, Ярославль, 2002 г., Выпуск 3, с.14-18.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| Способ имитации радиосигнала | 2016 |
|
RU2621329C1 |
| Способ имитации радиосигнала | 2020 |
|
RU2747883C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА | 2023 |
|
RU2804902C1 |
| Способ быстрого имитирования радиолокационных изображений | 2024 |
|
RU2835989C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ВОЗДУШНОЙ ЦЕЛИ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ, В УСЛОВИЯХ ПАССИВНЫХ И АКТИВНЫХ ПОМЕХ | 2023 |
|
RU2826626C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
Изобретение может быть использовано при полунатурном моделировании многолучевого распространения радиоволн. Достигаемый технический результат - имитация радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены. Способ заключается в том, что задаются координаты местоположения и параметры движения приемной и передающей радиотехнических систем с учетом диаграмм направленности их антенн определяются границы области взаимодействия радиоизлучения с участком рассеивающей поверхности, которая аппроксимируется элементарными площадками-фацетами, после чего с учетом параметров соответствующей модели рассеивания и различных метеоусловий, рефракции, зон затенения, движения участников сцены и с последующим вычислением угла падения радиолуча и удельной ЭПР для каждого фацета создается массив фацетов, одновременно видимых с позиции передающей и приемной антенн, которые затем упорядочиваются и сортируются таким образом, что каждому фиксированному моменту времени приема соответствуют парциальные сигналы группы фацетов с разницей задержек распространения, не превышающей половину величины разрешающей способности приемного устройства, затем для каждой из сформированных групп фацетов с учетом задержек парциальных сигналов фацетов, их доплеровских смещений частоты, затуханий, производится расчет их комплексных коэффициентов рассеивания и находится их векторная сумма, от которой вычисляется обратное преобразования Фурье, в результате чего строится последовательность комплексных отсчетов импульсных характеристик групп фацетов, определяющих комплексные отсчеты импульсной характеристики радиофизической сцены, путем их свертки с последовательностью отсчетов исходного радиосигнала формируется имитируемый эхо-сигнала и повторяются все описанные выше операции на интервале имитационного моделирования в соответствии с динамикой развития радиофизической сцены. 10 ил.
Способ имитации радиосигнала, отраженного от пространственно распределенной динамической радиофизической сцены, в реальном времени, заключающийся в том, что задаются координаты местоположения и параметры движения носителей передающей и приемной радиотехнических систем (РТС), с учетом диаграмм направленности (ДН) антенн определяются границы области взаимодействия радиоизлучения с участком рассеивающей поверхности, которая аппроксимируется элементарными площадками-фацетами, характерные размеры, параметры неровностей и электрические свойства которых определяются исходя из требуемой точности синтеза радиосигнала и свойств фацетной модели полигона, состоящей из слоев рельефа, естественных покровов и искусственных объектов, после чего с учетом параметров соответствующей модели рассеивания, метеоусловий, рефракции, зон затенения, движения участников сцены, и, с последующим вычислением угла падения радиолуча и удельной эффективной поверхности рассеяния (ЭПР) для каждого фацета, из фацетной модели полигона выбираются фацеты, одновременно видимые с позиции передающей и приемной антенн, отличающийся тем, что представляют механизм формирования отраженного радиосигнала как суперпозицию сигналов, рассеянных совокупностью выбранных фацетов - источников парциальных эхо-сигналов вторичных излучений, принимаемых РТС в фиксированные моменты времени, в каждый из которых на приемной антенне одновременно присутствуют парциальные сигналы группы фацетов с разницей задержек распространения, не превышающей половину величины разрешающей способности приемной РТС, в соответствии с чем выбранные и упорядоченные по возрастанию квантованных задержек распространения их парциальных сигналов фацеты сортируются по группам одновременно облучаемых фацетов для каждой из сформированных групп фацетов с учетом задержек парциальных сигналов, доплеровских смещений частоты, затуханий, производится расчет комплексных коэффициентов рассеивания и находится их векторная сумма, от которой вычисляется обратное преобразования Фурье, в результате чего строится последовательность комплексных отсчетов импульсных характеристик групп фацетов определяющих комплексные отсчеты импульсной характеристики радиофизической сцены, путем их свертки с последовательностью отсчетов излучаемого передающей РТС радиосигнала формируется имитируемый эхо-сигнал и повторяются все описанные выше операции на интервале имитационного моделирования в соответствии с динамикой развития радиофизической сцены.
| US 5192208 А, 09.03.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ЦЕЛЕЙ В ПОЛЕТЕ | 2001 |
|
RU2212682C2 |
| Воздушная нефтяная форсунка | 1937 |
|
SU52196A1 |
| Имитатор многолучевого радиоканала | 1984 |
|
SU1172036A1 |
| ИМИТАТОР РАДИОСИГНАЛОВ | 2001 |
|
RU2207586C2 |
| KR 20070116984 A, 11.12.2007 | |||
| Клапан | 1990 |
|
SU1789814A1 |
| WO 2007069253 A1, 21.06.2007. | |||

