[1001] Настоящая заявка на патент притязает на приоритет по предварительной заявке на патент США 60/421,309, озаглавленной "MIMO WLAN System", поданной 25 октября 2002 года, №60/421,462, озаглавленной "Channel Calibration for a Time Division Duplexed Communication System", поданной 25 октября 2002 года, №60/421,428, озаглавленной "Channel estimation and spatial processing for TDD MIMO systems", поданной 25 октября 2002 года, №60/438,601, озаглавленной "Pilots for MIMO communication systems", поданной 7 января 2003 года, права на которые принадлежат правообладателю настоящих заявок на патент и которые включены в настоящее описание во всей своей полноте в качестве ссылки.
Область техники, к которой относится изобретение
[1002] Настоящее изобретение относится, в общем случае, к обмену данными и, более точно, к пилот-сигналам, подходящим для использования в коммуникационных системах с множественным входом и множественным выходом.
Уровень техники
[1003] MIMO-система использует для передачи данных несколько (NT) передающих антенн и несколько (NR) приемных. MIMO канал, сформированный NT передающими и NR приемными антеннами, может быть разложен на NS независимых каналов, называемых собственными модами, где NS≤min{NT, NR}. Каждый из NS независимых каналов соответствует размерности. Система MIMO может обеспечить улучшенную производительность (т.е. увеличенную емкость при передаче и/или повышенную надежность) при использовании дополнительных размерностей, образованных множеством передающих и приемных антенн.
[1004] В беспроводной коммуникационной системе данные, предназначенные для передачи, сначала используют для модуляции радиочастотной (РЧ) несущей, для генерации РЧ модулированного сигнала, который лучше подходит для передачи по беспроводному каналу. В случае MIMO системы могут генерироваться и одновременно передаваться через NT передающих антенн до NT РЧ модулированных сигналов. Переданные РЧ модулированные сигналы могут достигать NR приемных антенн по нескольким путям распространения в беспроводном канале. Характеристики путей распространения, как правило, изменяются в течение времени благодаря нескольким факторам, таким как, например, замирание, многолучевое распространение и внешние помехи. Следовательно, передаваемые модулированные РЧ сигналы могут испытывать воздействия различных состояний канала (например, различных эффектов замирания и многолучевого распространения) и могут быть связаны с различными комплексными усилениями и отношениями сигнал/шум (ОСШ).
[1005] Для достижения высокой производительности часто бывает необходимым характеризовать отклик беспроводного канала. Например, отклик канала может быть необходим в передатчике для выполнения пространственной обработки (описанной ниже) данных, передаваемых в приемник. Отклик канала также может быть необходим в приемнике для выполнения пространственной обработки принятых сигналов для восстановления переданных данных.
[1006] Во многих беспроводных коммуникационных системах пилот-сигнал передается передатчиком для оказания содействия приемнику для выполнения некоторых функций. Пилот-сигнал, как правило, генерируют, основываясь на известных символах, и обрабатывают известным способом. Пилот-сигнал может быть использован в приемнике для оценки канала, получения таймирования и частоты, демодуляции данных и т.д.
[1007] При разработке MIMO пилот-сигнала приходится сталкиваться с различными проблемами. С одной стороны, поскольку передача пилот-сигнала представляет служебную информацию в MIMO системе, желательно минимизировать передачу пилот-сигнала насколько это возможно. Помимо этого, если MIMO система представляет собой систему с множественным доступом, которая поддерживает связь с множеством пользователей, то структура пилот-сигнала должна быть разработана таким образом, что пилот-сигналы, необходимые для поддержки множества пользователей, не занимают значительную часть доступных ресурсов системы.
[1008] Таким образом, в данной области техники существует потребность в пилот-сигналах для MIMO систем, которые удовлетворяют вышеизложенным требованиям.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[1009] В настоящем описании предлагаются пилот-сигналы, подходящие для использования в MIMO системах. Указанные пилот-сигналы реализованы с возможностью поддержки различных функций, которые могут быть необходимыми для надлежащей работы системы, например получение таймирования и частоты, оценка канала, калибровка и т.д. Пилот-сигналы могут рассматриваться как принадлежащие различным типам, разработанным и используемым для различных функций.
[1010] Различные типы пилот-сигналов могут включать в себя: пилот-сигнал маяка, MIMO пилот-сигнал, направленный опорный сигнал или направленный пилот-сигнал и пилот-сигнал несущей. Пилот-сигнал маяка передается через все передающие антенны и может быть использован для получения таймирования и частоты. MIMO пилот-сигнал также передается через все передающие антенны, но его покрывают различными ортогональными кодами, назначенными передающим антеннам. MIMO пилот-сигнал может использоваться для оценки канала. Направленный опорный сигнал передают на определенных собственных модах MIMO канала, и он является специфическим для каждого пользовательского терминала. Направленный опорный сигнал может быть использован для оценки канала и, возможно, для управления скоростью. Пилот-сигнал несущей может передаваться по определенным назначенным поддиапазонам/антеннам и может быть использован для отслеживания фазы сигнала несущей.
[1011] Основываясь на различных комбинациях указанных типов пилот-сигналов, могут быть определены различные схемы передачи пилот-сигнала. Например, в случае нисходящей линии точка доступа может передавать пилот-сигнал маяка, MIMO пилот-сигнал и пилот-сигнал несущей для всех пользовательских терминалов в ее области покрытия и необязательно может передавать направленный опорный сигнал любому активному пользовательскому терминалу, который принимает передачу по нисходящей линии от данной точки доступа. В случае восходящей линии, пользовательский терминал может передавать MIMO пилот-сигнал для калибровки и может передавать направленный опорный сигнал и пилот-сигнал несущей, если он запланирован (например, для передачи данных по нисходящей линии и/или восходящей линии).
[1012] Различные аспекты варианта осуществления настоящего изобретения более подробно описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[1013] Отличительные особенности и сущность настоящего изобретения станут более понятными из подробного описания, приводимого ниже, при рассмотрении совместно с чертежами, на которых одинаковые ссылочные позиции обозначают одинаковые элементы.
[1014] На Фиг.1 показана MIMO система со множественным доступом.
[1015] На Фиг.2 показана иллюстративная структура кадра для передачи данных в TDD MIMO-OFDM системе.
[1016] На Фиг.3 показаны передачи пилот-сигнала по нисходящей линии и восходящей линии для иллюстративной схемы передачи пилот-сигнала.
[1017] На Фиг.4 показана блок-схема точки доступа и пользовательского терминала.
[1018] На Фиг.5 показана блок-схема TX пространственного процессора, выполненного с возможностью генерации пилот-сигнала маяка.
[1019] На Фиг.6А показана блок-схема TX пространственного процессора, выполненного с возможностью генерации MIMO пилот-сигнала.
[1020] На Фиг.6В показана блок-схема RX пространственного процессора, выполненного с возможностью предоставления оценки отклика канала, основываясь на принятом MIMO пилот-сигнале.
[1021] На Фиг.7А показана блок-схема TX пространственного процессора, выполненного с возможностью генерации направленного опорного пилот-сигнала.
[1022] На Фиг.7В показана блок-схема RX пространственного процессора, выполненного с возможностью предоставления оценки отклика канала, основываясь на принятом направленном опорном сигнале.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[1023] Слово "иллюстративный" используется в настоящем описании как означающее "служащий в качестве примера, иллюстрации". Любой вариант осуществления, изложенный в настоящем описании как "иллюстративный", не следует с необходимостью рассматривать как предпочтительный или преимущественный перед другими вариантами осуществления.
[1024] На Фиг.1 показана MIMO система 100 с множественным доступом, которая поддерживает множество пользователей и выполнена с возможностью реализации пилот-сигналов, рассматриваемых в настоящем описании. MIMO система 100 включает в себя множество точек 110 доступа (AP), которые поддерживают связь с множеством пользовательских терминалов 120 (UT). Для простоты, на Фиг.1 показаны только две точки доступа 110а и 110b. Точка доступа, в общем случае, представляет собой неподвижную станцию, которая используется для связи с пользовательскими терминалами. Точка доступа также может называться базовой станцией или каким-либо другим термином.
[1025] Пользовательские терминалы 120 могут быть распределены по системе. Каждый пользовательский терминал может представлять собой неподвижный или мобильный терминал, который может обмениваться данными с точкой доступа. Пользовательский терминал также может называться терминалом доступа, мобильной станцией, удаленной станцией, устройством пользователя (UE), беспроводным устройством или каким-либо другим термином. Каждый пользовательский терминал может обмениваться данными с одной или, возможно, множеством точек доступа по нисходящей линии и/или восходящей линии в любой данный момент времени. Нисходящая линия (т.е. прямая линия) относится к передаче от точки доступа в пользовательский терминал, а восходящая линия (т.е. обратная линия) относится к передаче от пользовательского терминала в точку доступа. Как используется в настоящем описании, "активный" пользовательский терминал представляет собой терминал, принимающий передачу по нисходящей линии от точки доступа и/или ведущий передачу по восходящей линии в точку доступа.
[1026] На Фиг.1 точка 110а доступа обменивается данными с пользовательскими терминалами 120a-120f, а точка 110b доступа обменивается данными с пользовательскими терминалами 120f-120k. Назначение пользовательских терминалов точкам доступа, как правило, основывается на силе принимаемого сигнала, а не на расстоянии. В любой данный момент времени пользовательский терминал может принимать передачу по нисходящей линии от одной или множества точек доступа. Контроллер 130 системы соединен с точками 110 доступа и может быть реализован с возможностью выполнения нескольких функций, таких как (1) координация и управление подсоединенными к нему точками доступа, (2) маршрутизация данных между этими точками доступа и (3) доступ в систему и управление обменом данными с пользовательскими терминалами, обслуживаемыми этими точками доступа.
I. Пилот-сигналы
[1027] В настоящем описании предлагаются пилот-сигналы, подходящие для использования в MIMO системах, например, такой как показана на Фиг.1. Эти пилот-сигналы могут поддерживать различные функции, которые могут быть необходимыми для надлежащей работы системы, например получение таймирования и частоты, оценка канала, калибровка и т.д. Пилот-сигналы могут рассматриваться как принадлежащие различным типам, разработанным и используемым для различных целей. В таблице I перечислены четыре типа пилот-сигналов и их краткие описания для иллюстративного варианта осуществления пилот-сигнала. Также может быть определено меньшее количество типов пилот-сигналов, другие типы пилот-сигналов и/или дополнительные типы пилот-сигналов, и это находится в пределах объема настоящего изобретения.
Типы пилот-сигналов
Направленный опорный сигнал и направленный пилот-сигнал являются синонимами.
[1028] Основываясь на различных комбинациях указанных типов пилот-сигналов, могут быть определены различные схемы передачи пилот-сигнала. Например, в случае нисходящей линии точка доступа может передавать пилот-сигнал маяка, MIMO пилот-сигнал и пилот-сигнал несущей для всех пользовательских терминалов в ее области покрытия и необязательно может передавать направленный опорный сигнал любому активному пользовательскому терминалу, который принимает передачу по нисходящей линии от данной точки доступа. В случае восходящей линии пользовательский терминал может передавать MIMO пилот-сигнал для калибровки и может передавать направленный опорный сигнал и пилот-сигнал несущей, если он запланирован (например, для передачи данных по нисходящей линии и/или восходящей линии). Обработка при передаче и приеме этих различных типов пилот-сигнала более подробно описана ниже.
[1029] Пилот-сигналы, рассматриваемые в настоящем описании, могут использоваться в различных типах MIMO систем. Например, пилот-сигналы могут быть использованы в (1) в MIMO системах с одной несущей, (2) в MIMO системах с множеством несущих, которые используют мультиплексирование с ортогональным делением частот (OFDM), или какой-либо другой способ модуляции с множеством несущих, (3) в MIMO системах, в которых реализованы способы множественного доступа, такие как множественный доступ с частотным разделением каналов (FDMA), множественный доступ с временным разделением каналов (TDMA) и множественный доступ с кодовым разделением каналов (CDMA), (4) в MIMO системах, в которых для передачи данных реализовано мультиплексирование с частотным разделением (FDM), мультиплексирование с временным разделением (TDM) и/или мультиплексирование с кодовым разделением, (5) в MIMO системах, в которых для каналов нисходящей линии и восходящей линии реализована дуплексная связь с временным разделением (TDD), дуплексная связь с частотным разделением (FDD) и/или дуплексная связь с кодовым разделением (CDD), и (6) другим типом MIMO систем. Для простоты пилот-сигналы описаны ниже сначала для MIMO системы, реализующей OFDM (т.е. MIMO-OFDM системы), а затем для TDD MIMO-OFDM системы.
[1030] OFDM эффективно разделяет всю полосу частот системы на несколько (NF) ортогональных поддиапазонов, которые также называются тонами, частотными бинами или частотными подканалами. В случае OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может быть модулирована данными. В случае MIMO-OFDM системы каждый поддиапазон может быть связан с несколькими собственными модами, и каждая собственная мода каждого поддиапазона может рассматриваться в качестве независимого канала передачи.
[1031] Для простоты ниже описана конкретная структура пилот-сигнала для иллюстративной MIMO-OFDM системы. В этой MIMO-OFDM системе полоса частот системы разделена на 64 ортогональных поддиапазона (т.е. NF=64), которым назначены индексы от -32 до +31. Из этих 64 поддиапазонов 48 поддиапазонов (например, с индексами ±{1, ..., 6, 8, ..., 20, 22, ..., 26}) могут использоваться для передачи данных, 4 поддиапазона (например, с индексами ±{7, 21}) могут быть использованы для пилот-сигнала несущей и, возможно, для сигнализации, поддиапазон DC (с индексом 0) не используется, и оставшиеся поддиапазоны также не используются и служат в качестве охранных поддиапазонов. Таким образом, из 64 поддиапазонов 52 "используемых" поддиапазонов включают в себя 48 поддиапазонов данных и 4 поддиапазона пилот-сигнала, а оставшиеся 12 поддиапазонов не используются. Такая структура поддиапазонов OFDM более подробно описана в вышеупомянутой предварительной заявке на патент США №60/421,309. Для MIMO-OFDM системы также может быть реализовано различное количество поддиапазонов и другие структуры поддиапазонов OFDM, и это находится в пределах объема настоящего изобретения.
[1032] В случае OFDM, данные, предназначенные для передачи в каждом используемом поддиапазоне, сначала модулируют (т.е. выполняют отображение символов), используя конкретную схему модуляции (например, BPSK, QPSK или M-QAM), выбранную для использования в этом поддиапазоне. В каждом используемом поддиапазоне в каждый период символа может передаваться один символ модуляции. Каждый символ модуляции представляет собой комплексное значение для определенной точки в сигнальном созвездии, соответствующем выбранной схеме модуляции. В неиспользуемых поддиапазонах могут передаваться сигналы с нулевым значением. Для каждого периода символа OFDM символы модуляции для используемых поддиапазонов и нулевые значения сигналов для неиспользуемых поддиапазонов (т.е. символы модуляции и нули для всех NF поддиапазонов) преобразуют во временной домен, используя обратное быстрое преобразование Фурье (IFFT) для получения преобразованного символа, который содержит NF выборок временного домена. Для противодействия межсимвольной интерференции (ISI) часть каждого преобразованного символа обычно повторяют (что также называется добавлением циклического префикса) для формирования соответствующего OFDM символа, который затем передают по беспроводному каналу. Период OFDM символа, который часто называют в настоящем описании периодом символа, соответствует длительности одного OFDM символа.
1. Пилот-сигнал маяка
[1033] Пилот-сигнал маяка включает в себя определенный набор пилотных символов, который передают через каждую из NT передающих антенн. Тот же самый набор пилотных символов передают в течение NB периодов символов, назначенных для передачи пилот-сигнала маяка. В общем случае NB может представлять собой любое целое число, большее или равное единице.
[1034] В одном из иллюстративных вариантов осуществления набор пилотных символов для пилот-сигнала маяка представляет собой набор из 12 символов модуляции BPSK, который называется OFDM символом "B". 12 символов модуляции BPSK для OFDM символа B приведены в таблице 2. По оставшимся 52 неиспользуемым поддиапазонам передают сигналы с нулевым значением.
[1035]
Пилотные символы
[1036] Для иллюстративного варианта осуществления и, как показано в таблице 2, для пилот-сигнала маяка символ модуляции BPSK (1+j) передают в поддиапазонах -24, -16, -4, 12, 16, 20 и 24, и символ модуляции BPSK -(1+j) передают в поддиапазонах -20, -12, -8, 4 и 8. В оставшихся 52 поддиапазонах для пилот-сигнала маяка передают сигналы с нулевым значением.
[1037] OFDM символ B реализован для облегчения получения таймирования и частоты системы пользовательскими терминалами. Для иллюстративного варианта осуществления OFDM символа В, описанного выше, используются только 12 из 62 поддиапазонов, и эти поддиапазоны разделяются четырьмя поддиапазонами. Такое разделение четырьмя поддиапазонами дает возможность пользовательскому терминалу иметь начальную ошибку по частоте до двух поддиапазонов. Пилот-сигнал маяка дает возможность пользовательскому терминалу выполнить коррекцию его первоначальной грубой ошибки по частоте и коррекцию своей частоты таким образом, что дрейф фазы за время пилот сигнала маяка является небольшим (например, менее чем 45 градусов за время пилот-сигнала маяка при скорости оцифровки 20 МГц). Если продолжительность пилот-сигнала маяка составляет 8 мксек, то 45 градусов (или менее) дрейфа фазы за 8 мксек составляют 360 градусов за 64 мксек, что составляет приблизительно 16 кГц.
[1038] Ошибка по частоте 16 кГц, как правило, является слишком большой для работы. Дополнительная коррекция по частоте может быть получена при использовании MIMO пилот-сигнала и пилот-сигнала несущей. Эти пилот-сигналы имеют достаточную длительность для коррекции частоты пользовательского терминала с требуемой точностью (например, 250 Гц). Например, если TDD кадр составляет 2 мсек (как описано ниже), и если частота пользовательского терминала получена с точностью 250 Гц, то в течение одного TDD кадра сдвиг фазы составляет менее половины периода. Разность фаз пилот-сигнала маяка от одного TDD кадра к другому TDD кадру может быть использована для привязки частоты пользовательского терминала к тактовому генератору точки доступа, тем самым эффективно уменьшая ошибку по частоте до нуля.
[1039] В общем случае, набор пилотных символов, используемых для пилот-сигнала маяка может быть получен, используя любую схему модуляции. Таким образом, для пилот-сигнала маяка также могут быть использованы другие OFDM символы, полученные с использованием BPSK или какой-либо другой схемы модуляции, и это находится в пределах объема настоящего изобретения.
[1040] В иллюстративном варианте осуществления для передачи пилот-сигнала маяка доступны четыре передающие антенны. В таблице 3 перечислены OFDM символы, предназначенные для передачи через каждую из четырех передающих антенн для передачи пилот-сигнала маяка, которая длится два периода символов.
Пилот-сигнал маяка
2. MIMO пилот-сигнал
[1041] MIMO пилот-сигнал включает в себя определенный набор пилотных символов, который передают через каждую из NT передающих антенн. Для каждой передающей антенны один и тот же набор пилотных символов передают в течение NP периодов символов, предназначенных для передачи MIMO пилот-сигнала. Однако набор пилотных символов для каждой передающей антенны "покрывают" уникальной ортогональной последовательностью или кодом, назначенным для этой антенны. Покрытие представляет собой процесс, посредством которого данный пилотный символ или символ данных (или набор из L пилотных символов/символов данных, имеющих одинаковое значение), предназначенный для передачи, умножают на L элементарных сигналов или L-сигнальную ортогональную последовательность для получения L-покрытых символов, которые затем передаются. Снятие покрытия представляет собой комплементарный процесс, при котором принятые символы умножают на L элементарных сигналов той же самой L-сигнальной ортогональной последовательности для получения символов со снятым L-покрытием, которое затем суммируются для получения оценки переданных пилотных символов или символов данных. Посредством покрытия достигается ортогональность между NT передачами пилот-сигнала от NT передающих антенн, что позволяет приемнику различать отдельные передающие антенны, как описано ниже. Как описано ниже, длительность передачи MIMO пилот-сигнала может зависеть от его использования. В общем случае, NP может представлять собой любое целое число, большее или равное единице.
[1042] Для NT передающих антенн могут быть использованы один набор или разные наборы пилотных символов. В иллюстративном варианте осуществления один набор пилотных символов используется для всех NT передающих антенн для MIMO пилот-сигнала, и этот набор включает в себя 52 символа модуляции QPSK для 52 используемых поддиапазона, что называется OFDM символом "P". 52 символа модуляции QPSK для OFDM символа P приведены в таблице 2. В оставшихся 12 неиспользуемых поддиапазонах передают сигналы с нулевым значением.
[1043] 52 символа модуляции QPSK формируют уникальное "слово", которое предназначено для облегчения оценки канала пользовательскими терминалами. Это уникальное слово выбрано таким образом, что имеет минимальную вариацию отношения пиковое значение/среднее значение для сигнала, генерируемого, основываясь на этих 52 символах модуляции.
[1044] Хорошо известно, что OFDM, в общем случае, связано с более высокой вариацией отношения пиковое значение/среднее значение, чем некоторые другие способы модуляции (например, CDMA). В результате, для предотвращения амплитудного ограничения в схеме (например, усилителя мощности) в передающей цепи OFDM символы, как правило, передают при пониженном уровне мощности, т.е. с запасом по отношению к пиковому уровню мощности передачи. Запас используется для учета вариации в сигнале для этих OFDM символов. При минимизации вариации отношения пиковое значение/среднее значение в сигнале для OFDM символа P MIMO пилот-сигнал может передаваться при более высоком уровне мощности (т.е. для MIMO пилот-сигнала может применяться меньший запас по мощности). Более высокая мощность передачи для MIMO пилот-сигнала приводит к улучшенному качеству принятого сигнала для MIMO пилот-сигнала в приемнике. Меньшая вариация отношения пиковое значение/среднее значение также может уменьшить величину искажений и нелинейностей, генерируемых схемой в приемных и передающих цепях. Вышеперечисленные различные факторы могут давать в результате улучшенную точность при оценке канала, полученной, основываясь на MIMO пилот-сигнале.
[1045] OFDM символ с минимальной вариацией отношения пиковое значение/среднее значение может быть получен различными способами. Например, может быть выполнен случайный поиск, при котором большое количество наборов пилотных символов формируют случайным образом и оценивают для того, чтобы обнаружить набор, который имеет минимальную вариацию отношения пиковое значение/среднее значение. OFDM символ P, приведенный в таблице 2, представляет иллюстративный OFDM символ, который может быть использован для MIMO пилот-сигнала. В общем случае, набор пилотных символов, используемый для MIMO пилот-сигнала, может быть получен, используя любую схему модуляции. Таким образом, для MIMO пилот-сигнала также могут быть использованы различные другие OFDM символы, полученные с использованием QPSK или какой-либо другой схемы модуляции, и это находится в пределах объема настоящего изобретения.
[1046] Для покрытия OFDM символов P, передаваемых через NT передающих антенн, могут быть использованы различные ортогональные коды. Примеры таких ортогональных кодов включают в себя коды Уолша и ортогональные коды с изменяемым фактором расширения (OVSF). Для покрытия OFDM символов Р также могут быть использованы псевдоортогональные коды и квазиортогональные коды. Примером псевдоортогонального кода является М последовательность, хорошо известная в данной области техники. Примером квазиортогонального кода является квазиортогональная функция (QOF), определяемая в IS-2000. В общем случае, для покрытия могут быть использованы различные коды, некоторые из которых упомянуты выше. Для простоты, термин "ортогональный код" используется в настоящем описании для общего обозначения любого типа кода, подходящего для использования при покрытии пилотных символов. Длина (L) ортогонального кода выбирается так, чтобы она была больше или равна количеству передающих антенн (например, L ≥ NT), и для использования доступны L ортогональных кодов. Каждой передающей антенне назначают уникальный ортогональный код. NP OFDM символов P предназначены для передачи в NP периодах символов через каждую передающую антенну, покрывают ортогональным кодом, назначенным для этой передающей антенны.
[1047] В одном из вариантов осуществления доступны четыре передающие антенны и назначены последовательности Уолша с 4-мя элементарными сигналами W1=1111, W2=1010, W3=1100 и W4=1001 для MIMO пилот-сигнала. Для данной последовательности значение "1" указывает, что передается OFDM символ P, и значение "0" указывает, что передается OFDM символ -P. Для OFDM символа -P каждый из 52 символов модуляции QPSK в OFDM символе P является инвертированным (т.е. умноженным на -1). Результат покрытия для каждой передающей антенны представляет собой последовательность покрытых OFDM символов P для этой передающей антенны. Покрытие в сущности выполняется отдельно для каждого из поддиапазонов для генерации последовательности покрытых пилотных символов для этого поддиапазона. Последовательность покрытых пилотных символов для всех поддиапазонов формирует последовательность покрытых OFDM символов P.
[1048] В таблице 4 перечислены OFDM символы, предназначенные для передачи через каждую из четырех передающих антенн для передачи MIMO пилот-сигнала, которая имеет продолжительность 4 периода символов.
MIMO пилот-сигнал
Для этого набора из последовательности Уолша с 4-мя элементарными сигналами передача MIMO пилот-сигнала может производиться в течение целого, кратного четырем периодам символов, для того, чтобы гарантировать ортогональность между четырьмя передачами пилот-сигнала через четыре передающие антенны. Последовательность Уолша повторяют для передачи MIMO пилот-сигнала, которая по длине превышает длину последовательности Уолша.
[1049] Беспроводной канал для MIMO-OFDM системы может характеризоваться набором матриц  отклика канала, для индекса поддиапазона k∈K, где K={1 ... 26} для иллюстративной структуры поддиапазонов, изложенной выше. Матрица для каждого поддиапазона включает в себя NTNR значений,
отклика канала, для индекса поддиапазона k∈K, где K={1 ... 26} для иллюстративной структуры поддиапазонов, изложенной выше. Матрица для каждого поддиапазона включает в себя NTNR значений,  , для i∈{1 ... NR} и j∈{1 ... NT}, где
, для i∈{1 ... NR} и j∈{1 ... NT}, где  представляет усиление канала между j-й передающей антенной и i-й приемной антенной.
представляет усиление канала между j-й передающей антенной и i-й приемной антенной.
[1050] MIMO пилот-сигнал может быть использован в приемнике для оценки отклика беспроводного канала. В частности, для восстановления пилот-сигнала, отправленного через передающую антенну j и принятого приемной антенной i, принятые OFDM символы в антенне i сначала умножают на последовательность Уолша, назначенную передающей антенне j. OFDM символы "со снятым покрытием" для всех NP периодов символов для MIMO пилот-сигнала затем суммируются, причем суммирование может выполняться отдельно для каждого из 52 используемых поддиапазонов. Суммирование также может выполняться во временном домене для принятых OFDM символов (после удаления циклического префикса в каждом OFDM символе). Суммирование выполняют способом "выборка-к-выборке" для множества принятых OFDM символов, где выборки для каждого OFDM символа соответствуют различным поддиапазонам, если суммирование выполняют после FFT, и различным временным индексам, если суммирование выполняют до FFT. Результатом суммирования является  , для k∈K, которые являются оценками отклика канала от передающей антенны j до приемной антенны i для 52 используемых поддиапазонов. Такая же обработка может быть выполнена для оценки отклика канала от каждой передающей антенны до каждой приемной антенны. Обработка пилот-сигнала дает NTNR комплексных значений для каждого поддиапазона, где комплексные значения являются элементами матрицы
, для k∈K, которые являются оценками отклика канала от передающей антенны j до приемной антенны i для 52 используемых поддиапазонов. Такая же обработка может быть выполнена для оценки отклика канала от каждой передающей антенны до каждой приемной антенны. Обработка пилот-сигнала дает NTNR комплексных значений для каждого поддиапазона, где комплексные значения являются элементами матрицы  для оценки отклика канала для этого поддиапазона.
для оценки отклика канала для этого поддиапазона.
[1051] Обработка пилот-сигнала, описанная выше, может выполняться в точке доступа для получения оценки  отклика канала для восходящей линии и также может выполняться в пользовательском терминале для получения оценки
отклика канала для восходящей линии и также может выполняться в пользовательском терминале для получения оценки  отклика канала для нисходящей линии.
отклика канала для нисходящей линии.
3. Направленный опорный сигнал или направленный пилот-сигнал
[1052] Для MIMO-OFDM системы матрица отклика канала может быть "диагонализирована" для получения NS собственных мод для этого поддиапазона, где NS≤ min{NT, NR}. Это может быть достигнуто либо путем выполнения разложения по сингулярным значениям матрицы  отклика канала, либо разложение по собственным значениям корреляционной матрицы для , которая представляет собой
отклика канала, либо разложение по собственным значениям корреляционной матрицы для , которая представляет собой  Для простоты в нижеследующем описании используется разложение по сингулярным значениям.
Для простоты в нижеследующем описании используется разложение по сингулярным значениям.
[1053] Разложение по сингулярным значениям матрицы  отклика канала может быть выражено как:
отклика канала может быть выражено как:

где  представляет собой (NR×NR) унитарную матрицу левых собственных векторов для
представляет собой (NR×NR) унитарную матрицу левых собственных векторов для  ;
;
 представляет собой (NR×NT) диагональную матрицу сингулярных значений для
представляет собой (NR×NT) диагональную матрицу сингулярных значений для  ;
;
 представляет собой (NT×NT) унитарную матрицу правых собственных векторов для ; и
представляет собой (NT×NT) унитарную матрицу правых собственных векторов для ; и
"H" представляет собой транспонирование с комплексным сопряжением.
Унитарная матрица  характеризуется свойством
характеризуется свойством  , где
, где  представляет собой единичную матрицу.
представляет собой единичную матрицу.
[1054] Разложение по сингулярным значениям описано более подробно у Gilbert Strang в книге, озаглавленной "Linear Algebra and Its Applications", второе издание, Academic Press, 1980 г. Собственная мода обычно относится к теоретической конструкции. MIMO канал также можно рассматривать как включающий в себя NS пространственных каналов, которые могут быть использованы для передачи данных/пилот-сигнала. Каждый пространственный канал может соответствовать или может не соответствовать собственной моде в зависимости от того, была успешной или нет пространственная обработка в передатчике при диагонализации MIMO канала. Например, потоки данных передаются по пространственным каналам (а не по собственным модам) MIMO канала, если передатчик не имеет информации о MIMO канале, либо имеет неточную его оценку. Для простоты термин "собственная мода" в настоящем описании также используют для обозначения случая, когда производится попытка диагонализации MIMO канала, даже если она не является полностью успешной, например, вследствие неточной оценки канала.
[1055] Диагональная матрица  для каждого поддиапазона содержит неотрицательные вещественные значения на диагонали и нули в других местах. Диагональные элементы называются сингулярными значениями и представляют усиление для независимых каналов (или собственных мод) MIMO канала для k-го поддиапазона.
для каждого поддиапазона содержит неотрицательные вещественные значения на диагонали и нули в других местах. Диагональные элементы называются сингулярными значениями и представляют усиление для независимых каналов (или собственных мод) MIMO канала для k-го поддиапазона.
[1056] Разложение по собственным значениям может быть выполнено независимо для матрицы отклика канала для каждого из 52 используемых поддиапазонов для определения NS собственных мод для данного поддиапазона. Сингулярные значения для каждой диагональной матрицы могут быть упорядочены таким образом, что  где
где  является наибольшим сингулярным значением,
является наибольшим сингулярным значением,  является следующим по величине сингулярным значением и т.д., и
является следующим по величине сингулярным значением и т.д., и  является наименьшим сингулярным значением для k-го поддиапазона. Если сингулярные значение для каждой диагональной матрицы упорядочены, то собственные вектора (или столбцы) соответствующих матриц
является наименьшим сингулярным значением для k-го поддиапазона. Если сингулярные значение для каждой диагональной матрицы упорядочены, то собственные вектора (или столбцы) соответствующих матриц  и
и  также упорядочены, соответственно. После упорядочивания представляет сингулярное значение для лучшей собственной моды для поддиапазона k, которую также часто называют "основной" собственной модой.
также упорядочены, соответственно. После упорядочивания представляет сингулярное значение для лучшей собственной моды для поддиапазона k, которую также часто называют "основной" собственной модой.
[1057] "Широкополосная" собственная мода может быть определена как набор собственных мод, имеющих одинаковый индекс для всех поддиапазонов после упорядочивания. Таким образом m-я широкополосная собственная мода включает в себя m-е собственные моды всех поддиапазонов. Каждая широкополосная собственная мода связана с соответствующим набором собственных векторов для всех поддиапазонов. "Основная" широкополосная собственная мода представляет собой собственную моду, связанную с наибольшим сингулярным значением в каждой матрице  каждого поддиапазона после упорядочивания.
каждого поддиапазона после упорядочивания.
[1058] Матрица  включает в себя NT собственных векторов, которые могут быть использованы для пространственной обработки в передатчике, где
включает в себя NT собственных векторов, которые могут быть использованы для пространственной обработки в передатчике, где  и
и  представляет собой m-й столбец , который является собственным вектором для m-й собственной моды. Для унитарной матрицы собственные вектора являются взаимно ортогональными. Собственные вектора также называются "направляющими векторами.
представляет собой m-й столбец , который является собственным вектором для m-й собственной моды. Для унитарной матрицы собственные вектора являются взаимно ортогональными. Собственные вектора также называются "направляющими векторами.
[1059] Направленный опорный сигнал (т.е. направленный пилот-сигнал) содержит один или более наборов пилотных символов, которые передают через NT передающих антенн. В одном из вариантов осуществления один набор пилотных символов передают по одному набору поддиапазонов для одной широкополосной собственной моды в данный период символа при помощи выполнения пространственной обработки с множеством направляющих векторов для этой широкополосной собственной моды. В другом варианте осуществления множество наборов пилотных символов передают по множеству непересекающихся наборов поддиапазонов для множества широкополосных собственных мод в данный период символа при помощи выполнения пространственной обработки с множеством наборов направляющих векторов для этих широкополосных собственных мод (используя мультиплексирование поддиапазонов, которое описано ниже). Для простоты в нижеследующем описании предполагается, что один набор пилотных символов передают по одной широкополосной собственной моде в данный период символа (т.е. мультиплексирование поддиапазонов отсутствует).
[1060] В одном из вариантов осуществления набор пилотных символов для направленного опорного сигнала представляет собой тот же самый OFDM символ P, который используется для MIMO пилот-сигнала. Однако для направленного опорного сигнала также могут использоваться другие OFDM символы, и это находится в пределах объема настоящего изобретения.
[1061] Направленный опорный сигнал, передаваемый по m-й широкополосной моде (используя формирование луча, которое описано ниже) может быть выражен, как:

где  представляет собой (NT×1) вектор передачи для m-й собственной моды k-го поддиапазона;
представляет собой (NT×1) вектор передачи для m-й собственной моды k-го поддиапазона;
представляет собой направляющий вектор для m-й собственной моды k-го поддиапазона; и
 представляет собой пилотный символ для k-го поддиапазона (например, приведенный в таблице 2).
представляет собой пилотный символ для k-го поддиапазона (например, приведенный в таблице 2).
Вектор включает в себя NT символов передачи, предназначенных для отправки через NT передающих антенн для k-го поддиапазона.
[1062] Направленный опорный сигнал может использоваться в приемнике для оценки вектора, который может использоваться для пространственной обработки как при приеме, так и при передаче данных, как описано ниже. Обработка для направленного опорного сигнала более подробно описана ниже.
4. Пилот-сигнал несущей
[1063] Иллюстративная структура поддиапазонов OFDM, описанная выше, включает в себя четыре поддиапазона пилот-сигнала с индексами -21, -7, 7 и 21. В одном из вариантов осуществления пилот-сигнал несущей передает по четырем диапазонам пилот сигнала во всех периодах символов, которые не используются для других типов пилот-сигналов. Пилот-сигнал несущей может использоваться в приемнике для отслеживания изменений фазы РЧ сигнала несущей и дрейфа генераторов, как в передатчике, так и в приемнике. Это может обеспечить улучшенную производительность при демодуляции данных.
[1064] В одном из вариантов осуществления пилот-сигнал несущей содержит четыре пилотные последовательности,  ,
,  ,
,  и
и  , и передается по четырем поддиапазонам пилот-сигнала. В одном из вариантов осуществления четыре пилотные последовательности определяют следующим образом:
, и передается по четырем поддиапазонам пилот-сигнала. В одном из вариантов осуществления четыре пилотные последовательности определяют следующим образом:

где n является индексом периода символа (или OFDM символа).
[1065] Пилотные последовательности могут быть определены, основываясь на различных последовательностях данных. В одном из вариантов осуществления пилотная последовательность генерируется, основываясь на полиноме G(x)=x7+x4+x, где начальное состояние установлено в единицы, и выходные биты отображаются на значения сигнала следующим образом: 1⇒-1 и 0⇒1. Пилотная последовательность , для n={1, 2, ... 127}, при этом может быть выражена, как:
Значения "1" и "-1" в пилотной последовательности могут быть отображены на пилотные символы, используя конкретную схему модуляции. Например, используя BPSK, "1" может быть отображен на 1+j, и "-1" может быть отображен на -(1+j). В случае наличия более чем 127 OFDM символов пилотная последовательность может быть повторена таким образом, что  для n>127.
для n>127.
[1066] В одном из вариантов осуществления четыре пилотные последовательности , , и передают через четыре различных пары поддиапазона/антенн. В таблице 5 показано иллюстративное назначение четырех пилотных последовательностей четырем поддиапазонам пилот-сигнала и четырем передающим антеннам.
Пилот-сигнал несущей
Как показано в таблице 5, пилотная последовательность передается в поддиапазоне -21 антенны 1, пилотная последовательность передается в поддиапазоне -7 антенны 2, пилотная последовательность передается в поддиапазоне 7 антенны 3, и пилотная последовательность передается в поддиапазоне 21 антенны 4. Каждая пилотная последовательность, таким образом, передается в уникальном поддиапазоне и через уникальную антенну. При такой схеме передачи пилот-сигнала несущей удается избежать помех, появляющихся в результате того, что пилотная последовательность передается через множество передающих антенн в данном поддиапазоне.
[1067] В другом варианте осуществления четыре пилотные последовательности передают по основной собственной моде назначенных им поддиапазонам. Пространственная обработка пилотных символов несущей является аналогичной пространственной обработке для направленного опорного сигнала, которая описана выше и показана в уравнении (2). Для передачи пилот-сигнала несущей по основной собственной моде для пространственной обработки используют направляющий вектор  . Таким образом, пилотная последовательность
. Таким образом, пилотная последовательность  подвергается пространственной обработке с направляющим вектором
подвергается пространственной обработке с направляющим вектором  , пилотная последовательность подвергается пространственной обработке с направляющим вектором
, пилотная последовательность подвергается пространственной обработке с направляющим вектором  , пилотная последовательность подвергается пространственной обработке с направляющим вектором
, пилотная последовательность подвергается пространственной обработке с направляющим вектором  , и пилотная последовательность подвергается пространственной обработке с направляющим вектором
, и пилотная последовательность подвергается пространственной обработке с направляющим вектором  .
.
II. Пилот-сигналы для MIMO системы с одной несущей
[1068] Пилот-сигналы, рассматриваемые в настоящем описании, также могут быть использованы для MIMO систем с одной несущей, которые не используют OFDM. В данном случае применима большая часть описания, представленная выше, но без индекса k поддиапазона. Для пилот-сигнала маяка специфический пилотный символ b модуляции может быть передан через каждую из NT передающих антенн. Для MIMO пилот-сигнала специфический пилотный символ p модуляции может быть покрыт NT ортогональными последовательностями и передан через NT передающих антенн. Пилотный символ b может быть таким же или отличаться от пилотного символа p. Направленный опорный сигнал может передаваться, как показано в уравнении (2). Однако вектор  передачи, направляющий вектор
передачи, направляющий вектор  и пилотный символ
и пилотный символ  не являются функциями индекса k поддиапазона. Пилот-сигнал несущей может передаваться способом мультиплексирования с разделением времени либо может быть просто опущен.
не являются функциями индекса k поддиапазона. Пилот-сигнал несущей может передаваться способом мультиплексирования с разделением времени либо может быть просто опущен.
[1069] Для MIMO-OFDM системы циклический префикс, как правило, используют для обеспечения гарантии ортогональности между поддиапазонами при наличии разброса задержек в системе, а ортогональные коды позволяют идентифицировать отдельные передающие антенны. Для MIMO системы с одной несущей ортогональные коды обеспечивают как ортогональность, так и идентификацию антенны. Таким образом, ортогональные коды, используемые для покрытия пилотных символов в MIMO системе с одной несущей, могут быть выбраны таким образом, что они будут иметь хорошие свойства взаимной корреляции и отношения пик-к-побочному максимуму (т.е. при наличии разброса задержек в системе корреляция между любыми двумя ортогональными последовательностями, используемыми для покрытия, является маленькой). Примером такого ортогонального кода с хорошими свойствами взаимной корреляции и отношением пик-к-побочному максимуму является М последовательность и ее версии со сдвигом по времени. Однако для покрытия пилотных символов в MIMO системе с одной несущей также могут быть использованы другие типы кодов.
[1070] Для широкополосной MIMO системы с одной несущей направленный опорный сигнал может передаваться различными способами, учитывающими частотно-селективное замирание (т.е. частотный отклик, который не является плоским по все рабочей полосе частот). Несколько схем для передачи направленного опорного сигнала в широкополосной MIMO системе с одной несущей описаны ниже. В общем случае, передатчик может передавать опорный сигнал, который обработан таким же или похожим способом, что и обработка, используемая при передаче данных трафика по определенным широкополосным собственным модам. Затем приемник может каким-либо способом выполнить корреляцию принятого сигнала с локально сгенерированной копией переданного опорного сигнала и извлечь информацию о канале, которая дает возможность передатчику оценить согласованный фильтр канала.
[1071] В первой схеме передатчик сначала получает направляющий вектор для собственной моды. Направляющий вектор может быть получен при помощи периодической передачи OFDM пилотных символов при помощи выполнения анализа в частотном домене принятого MIMO пилот-сигнала, который был передан без OFDM или каким-либо другим способом. Для каждого значения k, где 1≤k≤NF,  представляет собой NT-вектор с NT элементами для NT передающих антенн. Затем передатчик выполняет обратное быстрое преобразование Фурье для каждого из NT положений вектора для направляющего вектора , с k в качестве частотной переменной при вычислении IFFT, для получения соответствующего импульса временного домена для связанной передающей антенны. Каждое положение вектора для вектора включает в себя NF значений для NF частотных поддиапазонов, и соответствующий импульс временного домена представляет собой последовательность из NF значений временного домена. Затем терминал добавляет циклический префикс к этому импульсу временного домена для получения импульса направленного опорного сигнала для передающей антенны. Один набор из NT импульсов направленного опорного сигнала генерируется для каждой собственной моды и может передаваться в один и тот же временной интервал через все NT передающие антенны. Множество наборов импульсов может генерироваться для множества собственных мод и передаваться, используя TDM.
представляет собой NT-вектор с NT элементами для NT передающих антенн. Затем передатчик выполняет обратное быстрое преобразование Фурье для каждого из NT положений вектора для направляющего вектора , с k в качестве частотной переменной при вычислении IFFT, для получения соответствующего импульса временного домена для связанной передающей антенны. Каждое положение вектора для вектора включает в себя NF значений для NF частотных поддиапазонов, и соответствующий импульс временного домена представляет собой последовательность из NF значений временного домена. Затем терминал добавляет циклический префикс к этому импульсу временного домена для получения импульса направленного опорного сигнала для передающей антенны. Один набор из NT импульсов направленного опорного сигнала генерируется для каждой собственной моды и может передаваться в один и тот же временной интервал через все NT передающие антенны. Множество наборов импульсов может генерироваться для множества собственных мод и передаваться, используя TDM.
[1072] Для первой схемы приемник выполняет оцифровку принятого сигнала для получения принятого вектора  , удаляет циклический префикс и выполняет быстрое преобразование Фурье для каждого положения вектора принятого вектора
, удаляет циклический префикс и выполняет быстрое преобразование Фурье для каждого положения вектора принятого вектора  для получения оценки соответствующего элемента
для получения оценки соответствующего элемента  . Каждое положение вектора принятого вектора
. Каждое положение вектора принятого вектора  (после удаления циклического префикса) включает в себя NF выборок временного домена. Затем приемник использует оценку
(после удаления циклического префикса) включает в себя NF выборок временного домена. Затем приемник использует оценку  для синтеза согласованного фильтра временного домена, который может быть использован для фильтрации принятой передачи данных. Согласованный фильтр временного домена включает в себя согласованный фильтр импульса для каждой из приемных антенн. Синтез согласованного фильтра временного домена описан в заявке на патент США №10/017,308, озаглавленной "Time-Domain Transmit and Receive Processing with Channel Eigen-mode Decomposition for MIMO Systems", поданной 7 декабря 2001 г.
для синтеза согласованного фильтра временного домена, который может быть использован для фильтрации принятой передачи данных. Согласованный фильтр временного домена включает в себя согласованный фильтр импульса для каждой из приемных антенн. Синтез согласованного фильтра временного домена описан в заявке на патент США №10/017,308, озаглавленной "Time-Domain Transmit and Receive Processing with Channel Eigen-mode Decomposition for MIMO Systems", поданной 7 декабря 2001 г.
[1073] Для первой схемы обработка в передатчике для направленного опорного сигнала в MIMO системе с одной несущей аналогично обработке в передатчике направленного опорного сигнала в MIMO-OFDM системе. Однако после направленного опорного сигнала выполняют другие передачи, используя единственный сигнал несущей, например, описанные в вышеупомянутой заявке на патент США №10/017,308. Помимо этого приемник использует направленный опорный сигнал для синтеза согласованных фильтров временного домена, как описано выше.
[1074] Во второй схеме передатчик изолирует один многолучевой компонент для широкополосного канала. Это может быть достигнуто, например, путем выполнения поиска принятого MIMO пилот-сигнала при помощи скользящего коррелятора способом, аналогичным часто выполняемому в CDMA системах для поиска многолучевых компонентов. Затем передатчик рассматривает этот многолучевой компонент как узкополосный канал и получает один направляющий вектор  для данного многолучевого компонента для каждой собственной моды. Далее множество направляющих векторов может быть сгенерировано для множества собственных мод для этого многолучевого компонента.
для данного многолучевого компонента для каждой собственной моды. Далее множество направляющих векторов может быть сгенерировано для множества собственных мод для этого многолучевого компонента.
III. Структура пилот-сигнала TDD MIMO-OFDM системы
[1075] Пилот-сигналы, рассматриваемые в настоящем описании, могут быть использованы для различных MIMO и MIMO-OFDM систем. Эти пилотные сигналы могут быть использованы для систем, которые используют общие или раздельные полосы частот для нисходящей линии и восходящей линии. Для простоты ниже описана иллюстративная структура пилот-сигнала для иллюстративной MIMO-OFDM системы. Для этой MIMO-OFDM системы нисходящая линия и восходящая линия расположены в одном диапазоне частот, используя дуплексную связь с временным разделением (TDD).
[1076] На Фиг.2 показан вариант осуществления 200 кадра, который может быть использован в TDD MIMO-OFDM системе. Передача данных происходит в единицах TDD кадров, причем каждый из них имеет конкретную продолжительность (например, 2 мсек). Каждый TDD кадр разделен на фазу нисходящей линии и фазу восходящей линии. Фаза нисходящей линии дополнительно разделена на множество сегментов для множества транспортных каналов нисходящей линии. В варианте осуществления, показанном на Фиг.2, транспортные каналы нисходящей линии включают в себя широковещательный канал (BCH), прямой канал управления (FCCH) и прямой канал (FCH). Аналогично фаза восходящей линии разделена на множество сегментов для множества транспортных каналов восходящей линии. В варианте осуществления, показанном на Фиг.2, транспортные каналы восходящей линии включают в себя обратный канал (RCH) и канал произвольного доступа (RACH).
[1077] В случае нисходящей линии BCH сегмент 210 используют для передачи одного блока 212 данных протокола (PDU), который включает в себя часть 214 для пилот-сигнала маяка, часть 216 для MIMO пилот-сигнала и часть 218 для BCH сообщения. BCH сообщение переносит системные параметры для пользовательских терминалов в системе. FCCH сегмент 220 используют для передачи одного FCCH PDU, который переносит назначения ресурсов нисходящей линии и восходящей линии и другую сигнализацию для пользовательских терминалов. FCH сегмент 230 используют для передачи одного или нескольких FCH PDU 232. Могут быть определены различные типы FCH PDU. Например, FCH PDU 232а включает в себя часть 234а для пилот-сигнала и часть 236а для пакета данных. FCH PDU 232b включает в себя единственную часть 236b для пакета данных. FCH PDU 232с включает в себя единственную часть 234с для пилот-сигнала.
[1078] В случае восходящей линии RCH сегмент 240 используют для передачи одного или нескольких RCH PDU 242 по восходящей линии. Также могут быть определены различные типы RCH PDU. Например, RCH PDU 242а включает в себя единственную часть 246а для пакета данных. RCH PDU 242b включает в себя часть 244b для пилот-сигнала и часть 246b для пакета данных. RCH PDU 242с включает в себя единственную часть 244с для пилот-сигнала. RACH сегмент 250 используется пользовательским терминалом для получения доступа в систему и отправки коротких сообщений по восходящей линии. RACH PDU 252 может быть отправлен в RACH сегменте 250 и включает в себя часть 254 для пилот-сигнала и часть 256 для сообщения.
[1079] Для варианта осуществления, показанного на Фиг.2, пилот-сигнал маяка и MIMO пилот-сигнал передают по нисходящей линии в каждом TDD кадре в BCH сегменте. Пилот-сигнал может передаваться или может не передаваться в любом данном FCH/RCH PDU. Если пилот-сигнал передается, то он может занимать весь PDU или только его часть, как показано на Фиг.2. Пилот-сигнал передают в RACH PDU для того, чтобы дать возможность точке доступа оценить подходящие векторы во время процедуры доступа. Часть пилот-сигнала также называют "преамбулой". Пилот-сигнал, который передают в любом данном FCH/RCH PDU, может представлять собой направленный опорный сигнал или MIMO пилот-сигнал в зависимости от цели, с которой используют этот пилот-сигнал. Пилот-сигнал, передаваемый в RACH PDU, как правило, представляет собой направленный опорный сигнал, хотя вместо него также может передаваться MIMO пилот-сигнал. Пилот-сигнал несущей передают в поддиапазонах пилот-сигнала и частях, которые не используются для передачи других пилот-сигналов. Для простоты пилот-сигнал несущей на Фиг.2 не показан. Длительность различных частей на Фиг.2 приведена не в масштабе.
[1080] Структура кадра и транспортных каналов, показанная на Фиг.2, более подробно описана в вышеупомянутой предварительной заявке на патент США №60/421,309.
1. Калибровка
[1081] Для TDD MIMO-OFDM системы с совместно используемой полосой частот отклики каналов нисходящей линии и восходящей линии могут рассматриваться как взаимообратные по отношению друг к другу. То есть, если представляет матрицу отклика канала от антенной решетки A до антенной решетки B для поддиапазона k, то взаимообратный канал подразумевает, что связь от решетки B до решетки A дается  , где
, где  обозначает результат транспонирования
обозначает результат транспонирования  . Для TDD MIMO-OFDM системы характеристики взаимообратного канала могут использоваться для упрощения оценки канала и пространственной обработки как в передатчике, так и в приемнике.
. Для TDD MIMO-OFDM системы характеристики взаимообратного канала могут использоваться для упрощения оценки канала и пространственной обработки как в передатчике, так и в приемнике.
[1082] Однако частотные отклики передающей и приемной цепей в точке доступа, как правило, отличаются от частотных откликов приемной и передающей цепи в пользовательском терминале. Отклик "эффективного" канала нисходящей линии,  , и отклик "эффективного" канала восходящей линии,
, и отклик "эффективного" канала восходящей линии,  , которые включают в себя отклики используемых передающих и приемных цепей, могут быть выражены как:
, которые включают в себя отклики используемых передающих и приемных цепей, могут быть выражены как:

где  и
и  представляют собой Nap×Nap диагональные матрицы частотных откликов передающей цепи и приемной цепи, соответственно, в точке доступа для поддиапазона k;
представляют собой Nap×Nap диагональные матрицы частотных откликов передающей цепи и приемной цепи, соответственно, в точке доступа для поддиапазона k;
 и
и  представляют собой Nut×Nut диагональные матрицы частотных откликов передающей цепи и приемной цепи, соответственно, в пользовательском терминале для поддиапазона k;
представляют собой Nut×Nut диагональные матрицы частотных откликов передающей цепи и приемной цепи, соответственно, в пользовательском терминале для поддиапазона k;
Nap представляет собой количество антенн в точке доступа; и
Nut представляет собой количество антенн в пользовательском терминале.
[1083] Комбинируя уравнения в наборе (4) уравнений получаем следующее:

где  и
и  . Поскольку
. Поскольку  ,
,  , и являются диагональными матрицами,
, и являются диагональными матрицами,  и
и  также являются диагональными матрицами.
также являются диагональными матрицами.
[1084] Для получения оценок,  и
и  , реальных диагональных матриц,
, реальных диагональных матриц,  и
и  , для k∈K, может быть выполнена калибровка. Матрицы
, для k∈K, может быть выполнена калибровка. Матрицы  и
и  содержат поправочные факторы, которые могут учитывать различия в частотных откликах передающих/приемных цепей в точке доступа и пользовательском терминале. Отклик "калиброванного" канала нисходящей линии,
содержат поправочные факторы, которые могут учитывать различия в частотных откликах передающих/приемных цепей в точке доступа и пользовательском терминале. Отклик "калиброванного" канала нисходящей линии,  , видимый пользовательскому терминалу, и отклик "калиброванного" канала восходящей линии,
, видимый пользовательскому терминалу, и отклик "калиброванного" канала восходящей линии,  , видимый в точке доступа, при этом могут быть выражены как:
, видимый в точке доступа, при этом могут быть выражены как:



Точность соотношения по уравнению (6с) зависит от точности поправочных матриц, и  которая, в свою очередь, зависит от качества оценок откликов эффективных каналов нисходящей линии и восходящей линии,
которая, в свою очередь, зависит от качества оценок откликов эффективных каналов нисходящей линии и восходящей линии,  и
и  используемых для вывода этих поправочных матриц. Поправочный вектор
используемых для вывода этих поправочных матриц. Поправочный вектор  может быть определен как включающий в себя только Nut диагональных элементов
может быть определен как включающий в себя только Nut диагональных элементов  а поправочный вектор
а поправочный вектор  может быть определен как включающий в себя только Nap диагональных элементов
может быть определен как включающий в себя только Nap диагональных элементов  Калибровка более подробно описана в вышеупомянутой предварительной заявке на патент США №60/421,462.
Калибровка более подробно описана в вышеупомянутой предварительной заявке на патент США №60/421,462.
[1085] Пилот-сигналы, рассматриваемые в настоящем описании, также могут быть использованы для MIMO систем и MIMO-OFDM систем, которые не выполняют калибровку. Для простоты, в нижеследующем описании предполагается, что калибровка выполняется, и что поправочные матрицы и используются в передающих трактах точки доступа и пользовательского терминала, соответственно.
2. Пилот-сигнал маяка и MIMO пилот-сигнал
[1086] Как показано на Фиг.2, пилот-сигнал маяка и MIMO пилот-сигнал передают по нисходящей линии в BCH для каждого TDD кадра. Пилот-сигнал маяка может использоваться пользовательским терминалом для получения таймирования и частоты. MIMO пилот-сигнал может использоваться в пользовательском терминале для (1) получения оценки MIMO канала нисходящей линии, (2) вывода направляющих векторов для передачи по восходящей линии и (3) вывода согласованного фильтра для передачи по нисходящей линии, как описано ниже.
[1087] В иллюстративной схеме передачи пилот-сигнала пилот-сигнал маяка передают в течение двух периодов символов, а MIMO пилот-сигнал передают в течение 8 периодов символов в начале BCH сегмента. В таблице 6 показаны пилот-сигнал маяка и MIMO пилот-сигнал для этой иллюстративной схемы.
[1088]
Пилот-сигнал маяка и MIMO пилот-сигнал для BCH
[1089] Пилот-сигнал маяка, передаваемый по нисходящей линии, может быть выражен как:

где  представляет собой вектор передачи для поддиапазона k для пилот-сигнала маяка; и
представляет собой вектор передачи для поддиапазона k для пилот-сигнала маяка; и
 представляет собой пилотный символ, предназначенный для передачи в поддиапазоне k для пилот-сигнала маяка, приведенного в таблице 2.
представляет собой пилотный символ, предназначенный для передачи в поддиапазоне k для пилот-сигнала маяка, приведенного в таблице 2.
Как показано в уравнении (7), пилот-сигнал маяка масштабируют на поправочный вектор  но не подвергают другим видам пространственной обработки.
но не подвергают другим видам пространственной обработки.
[1090] MIMO пилот-сигнал, передаваемый по нисходящей линии, может быть выражен как:

где  представляет собой (Nap×1) вектор передачи для поддиапазона k в период n символа для MIMO пилот-сигнала нисходящей линии;
представляет собой (Nap×1) вектор передачи для поддиапазона k в период n символа для MIMO пилот-сигнала нисходящей линии;
 представляет собой (Nap×1) вектор Nap элементарных сигналов Уолша для Nap передающих антенн в точке доступа в период n символа для MIMO пилот-сигнала нисходящей линии; и
представляет собой (Nap×1) вектор Nap элементарных сигналов Уолша для Nap передающих антенн в точке доступа в период n символа для MIMO пилот-сигнала нисходящей линии; и
 представляет собой пилотный символ, предназначенный для передачи в поддиапазоне k для MIMO пилот-сигнала, который приведен в таблице 2.
представляет собой пилотный символ, предназначенный для передачи в поддиапазоне k для MIMO пилот-сигнала, который приведен в таблице 2.
[1091] Как показано в уравнении (8), MIMO пилот-сигнал покрывают вектором  и дополнительно масштабируют при помощи поправочной матрицы
и дополнительно масштабируют при помощи поправочной матрицы  но не подвергают другим видам пространственной обработки. Один и тот же вектор Уолша используют для всех поддиапазонов и, таким образом, не является функцией индекса k поддиапазона. Однако поскольку каждая последовательность Уолша представляет собой уникальную последовательность из 4 элементарных сигналов Уолша для 4 периодов символов, является функцией периода n символа. Таким образом, вектор включает в себя Nap элементарных сигналов Уолша, предназначенных для использования в Nap передающих антеннах в точке доступа для периода n символа. Для схемы, показанной в таблице 6, четыре вектора
но не подвергают другим видам пространственной обработки. Один и тот же вектор Уолша используют для всех поддиапазонов и, таким образом, не является функцией индекса k поддиапазона. Однако поскольку каждая последовательность Уолша представляет собой уникальную последовательность из 4 элементарных сигналов Уолша для 4 периодов символов, является функцией периода n символа. Таким образом, вектор включает в себя Nap элементарных сигналов Уолша, предназначенных для использования в Nap передающих антеннах в точке доступа для периода n символа. Для схемы, показанной в таблице 6, четыре вектора  для n={3, 4, 5, 6}, для первых четырех периодов символов передачи MIMO пилот-сигнала по BCH представляют собой
для n={3, 4, 5, 6}, для первых четырех периодов символов передачи MIMO пилот-сигнала по BCH представляют собой 
 и четыре вектора
и четыре вектора  для n={7, 8, 9, 10}, для следующих четырех периодов символов повторяют таким образом, что
для n={7, 8, 9, 10}, для следующих четырех периодов символов повторяют таким образом, что  ,
,  ,
,  и
и  .
.
[1092] MIMO пилот-сигнал, передаваемый по восходящей линии, может быть выражен как:

где  представляет собой (Nut×1) вектор передачи для поддиапазона k в период n символа для MIMO пилот-сигнала восходящей линии. Вектор
представляет собой (Nut×1) вектор передачи для поддиапазона k в период n символа для MIMO пилот-сигнала восходящей линии. Вектор  Уолша, используемый для MIMO пилот-сигнала восходящей линии, может быть таким же или отличным от вектора Уолша, используемого для MIMO пилот-сигнала нисходящей линии. Например, если пользовательский терминал оборудован только двумя передающими антеннами, то
Уолша, используемый для MIMO пилот-сигнала восходящей линии, может быть таким же или отличным от вектора Уолша, используемого для MIMO пилот-сигнала нисходящей линии. Например, если пользовательский терминал оборудован только двумя передающими антеннами, то  может включать в себя две последовательности Уолша с длиной 2 или более.
может включать в себя две последовательности Уолша с длиной 2 или более.
3. Пространственная обработка
[1093] Как описано выше, матрица отклика канала для каждого поддиапазона может быть диагонализирована для получения NS собственных мод для этого поддиапазона. Разложение по сингулярным значениям матрицы отклика калиброванного канала восходящей линии,  , может быть выражено как:
, может быть выражено как:

где  представляет собой (Nut×Nut) унитарную матрицу левых собственных векторов ;
представляет собой (Nut×Nut) унитарную матрицу левых собственных векторов ;
представляет собой (Nut×Nap) диагональную матрицу сингулярных значений ; и
 представляет собой (Nap×Nap) унитарную матрицу правых собственных векторов .
представляет собой (Nap×Nap) унитарную матрицу правых собственных векторов .
[1094] Аналогично разложение по сингулярным значениям матрицы отклика калиброванного канала нисходящей линии,  , может быть выражено как:
, может быть выражено как:

где матрицы  и
и  представляют собой унитарные матрицы левых и правых собственных векторов, соответственно, для .
представляют собой унитарные матрицы левых и правых собственных векторов, соответственно, для .
[1095] Как показано в уравнениях (10) и (11), и исходя из вышеприведенного описания матрицы левых и правых собственных векторов для одной линии представляют собой результат комплексного сопряжения матриц правых и левых собственных векторов, соответственно, для другой линии. Для простоты, ссылки на матрицы и в нижеследующем описании также могут относиться к различным их формам (например, может относиться к , ,  и
и  ). Матрицы и могут быть использованы в точке доступа и пользовательском терминале, соответственно, для пространственной обработки и определяются как таковые своими подстрочными индексами.
). Матрицы и могут быть использованы в точке доступа и пользовательском терминале, соответственно, для пространственной обработки и определяются как таковые своими подстрочными индексами.
[1096] В одном из вариантов осуществления пользовательский терминал выполнен с возможностью оценки отклика калиброванного канала нисходящей линии, основываясь на MIMO пилот-сигнале, передаваемом точкой доступа. При этом пользовательский терминал может выполнять разложение по сингулярным значениям оценки отклика калиброванного канала нисходящей линии,  , для k∈K, для получения диагональной матрицы
, для k∈K, для получения диагональной матрицы  и матрицы
и матрицы  левых собственных векторов для каждого поддиапазона. Разложение по сингулярным значениям может быть представлено в виде
левых собственных векторов для каждого поддиапазона. Разложение по сингулярным значениям может быть представлено в виде  , где знак "^" каждой матрицы указывает, что она представляет собой оценку реальной матрицы. Аналогично, точка доступа может оценить отклик калиброванного канала восходящей линии, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. При этом точка доступа может выполнять разложение по сингулярным значениям оценки отклика калиброванного канала восходящей линии,
, где знак "^" каждой матрицы указывает, что она представляет собой оценку реальной матрицы. Аналогично, точка доступа может оценить отклик калиброванного канала восходящей линии, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. При этом точка доступа может выполнять разложение по сингулярным значениям оценки отклика калиброванного канала восходящей линии,  , для k∈K, для получения диагональной матрицы и матрицы
, для k∈K, для получения диагональной матрицы и матрицы  левых собственных векторов
левых собственных векторов  для каждого поддиапазона. Такое разложение по сингулярным значениям может быть представлено в виде
для каждого поддиапазона. Такое разложение по сингулярным значениям может быть представлено в виде  . Точка доступа и пользовательский терминал также могут получить требуемые собственные вектора, основываясь на направленном опорном сигнале, как описано ниже.
. Точка доступа и пользовательский терминал также могут получить требуемые собственные вектора, основываясь на направленном опорном сигнале, как описано ниже.
[1097] Передача данных может производиться по одной или множеству широкополосных собственных мод каждой линии. Конкретное количество широкополосных собственных мод, используемых при передаче данных, как правило, зависит от состояния канала и может быть выбрано различными способами. Например, широкополосные собственные моды могут выбираться посредством использования процедуры "наполнения водой", при которой пытаются максимизировать общую пропускную способность при помощи (1) выбора для использования наилучшего набора из одного или нескольких широкополосных собственных мод и (2) распределения общей мощности передачи среди выбранных широкополосных собственных мод (собственной моды).
[1098] Таким образом, MIMO-OFDM система может быть выполнена с возможностью поддержки множества рабочих режимов, включающих в себя:
- режим пространственного мультиплексирования - используется для передачи данных по множеству широкополосных собственных мод, и
- режим формирования луча - используется для передачи данных по основной (наилучшей) широкополосной собственной моде.
[1099] Передача данных по множеству широкополосных собственных мод может быть достигнута путем выполнения пространственной обработки с множеством наборов собственных векторов в матрицах или  для k∈K (т.е. один набор собственных векторов для каждой широкополосной собственной моды. В таблице 7 сведены виды пространственной обработки в точке доступа и пользовательском терминале как для передачи данных, так и для приема данных в случае режима пространственного мультиплексирования.
для k∈K (т.е. один набор собственных векторов для каждой широкополосной собственной моды. В таблице 7 сведены виды пространственной обработки в точке доступа и пользовательском терминале как для передачи данных, так и для приема данных в случае режима пространственного мультиплексирования.
Пространственная обработка для режима пространственного мультиплексирования



В таблице 7  представляет собой вектор "данных" с ненулевыми элементами количеством до NS для символов модуляции, предназначенных для передачи по NS собственным модам поддиапазона k,
представляет собой вектор "данных" с ненулевыми элементами количеством до NS для символов модуляции, предназначенных для передачи по NS собственным модам поддиапазона k,  представляет собой вектор передачи для поддиапазона k,
представляет собой вектор передачи для поддиапазона k,  представляет собой принятый вектор для поддиапазона k, и
представляет собой принятый вектор для поддиапазона k, и  представляет собой оценку переданного вектора
представляет собой оценку переданного вектора  данных. Подстрочные индексы "dn" и "up" у этих векторов обозначают передачу по нисходящей линии и передачу по восходящей линии, соответственно.
данных. Подстрочные индексы "dn" и "up" у этих векторов обозначают передачу по нисходящей линии и передачу по восходящей линии, соответственно.
[1100] Передача данных по одной широкополосной собственной моде может быть достигнута при помощи использования либо "формирования луча", либо "направления луча". В случае формирования луча символы модуляции подвергаются пространственной обработке с набором собственных векторов  или
или  для k∈K, для основной широкополосной собственной моды. В случае направления луча символы модуляции подвергаются пространственной обработке с набором "нормированных" (или "насыщенных") собственных векторов
для k∈K, для основной широкополосной собственной моды. В случае направления луча символы модуляции подвергаются пространственной обработке с набором "нормированных" (или "насыщенных") собственных векторов  или
или  для k∈K, для основной широкополосной собственной моды. Нормированные собственные вектора
для k∈K, для основной широкополосной собственной моды. Нормированные собственные вектора  или
или  могут быть выведены, как описано ниже.
могут быть выведены, как описано ниже.
[1101] Пространственная обработка для режима пространственного мультиплексирования и режима направленного луча более подробно описаны в вышеупомянутых заявках на патент США №№ 60/421,309 и 60/421,428. Направленные опорные сигналы для режима пространственного мультиплексирования и режима направленного луча описаны ниже.
4. Направленный опорный сигнал
[1102] Для взаимообратного канала (например, после выполнения калибровки для учета различий в передающих/приемных цепях в точке доступа и пользовательском терминале) направленный опорный сигнал может быть передан пользовательским терминалом и использоваться в точке доступа для получения оценок как  так и
так и  для k∈K, без необходимости оценки MIMO канала или выполнения разложения по сингулярным значениям. Аналогично, направленный опорный сигнал может быть передан точкой доступа и использован в пользовательском терминале для получения оценок как
для k∈K, без необходимости оценки MIMO канала или выполнения разложения по сингулярным значениям. Аналогично, направленный опорный сигнал может быть передан точкой доступа и использован в пользовательском терминале для получения оценок как  так и
так и  для k∈K.
для k∈K.
[1103] В одном из вариантов осуществления направленный опорный сигнал содержит набор пилотных символов (например, OFDM символ P), который передают по одной широкополосной собственной моде в данный период символа, выполняя пространственную обработку с набором ненормированных или нормированных собственных векторов для этой широкополосной собственной моды. В альтернативном варианте осуществления направленный опорный сигнал содержит множество наборов пилотных символов, которые передают по множеству широкополосных собственных мод в одном и том же периоде символа, выполняя пространственную обработку с множеством наборов ненормированных или нормированных собственных векторов для этих широкополосных собственных мод. В любом случае, направленный опорный сигнал передают через все Nap антенны в точке доступа (в случае нисходящей линии) и через все Nut антенны в пользовательском терминале (в случае восходящей линии). Для простоты, в нижеследующем описании предполагается, что направленный опорный сигнал передают в данном периоде символа для одной широкополосной собственной моды.
А. Направленный опорный сигнал нисходящей линии - Режим пространственного мультиплексирования
[1104] Для режима пространственного мультиплексирования направленный опорный сигнал нисходящей линии, передаваемый по m-й широкополосной собственной моде точкой доступа, может выражен как:

где  представляет собой вектор передачи для k-го поддиапазона m-й широкополосной собственной моды;
представляет собой вектор передачи для k-го поддиапазона m-й широкополосной собственной моды;
 представляет собой собственный вектор для k-го поддиапазона m-й широкополосной собственной моды; и
представляет собой собственный вектор для k-го поддиапазона m-й широкополосной собственной моды; и
 представляет собой пилотный символ, предназначенный для передачи по поддиапазону k для направленного опорного сигнала (например, как показано в таблице 2).
представляет собой пилотный символ, предназначенный для передачи по поддиапазону k для направленного опорного сигнала (например, как показано в таблице 2).
Направляющий вектор  представляет собой m-й столбец матрицы
представляет собой m-й столбец матрицы  где
где 
[1105] Принятый направленный опорный сигнал нисходящей линии в пользовательском терминале для режима пространственного мультиплексирования может быть выражен как:

где  представляет собой сингулярное значение для k-го поддиапазона m-й широкополосной собственной моды.
представляет собой сингулярное значение для k-го поддиапазона m-й широкополосной собственной моды.
В. Направленный опорный сигнал нисходящей линии - Режим направленного луча
[1106] Для режима направленного луча пространственную обработку в передатчике выполняют, используя набор "нормированных" собственных векторов для основной широкополосной собственной моды. Общая передаточная функция с нормированным собственным вектором  отличается от общей передаточной функции с ненормированным собственным вектором
отличается от общей передаточной функции с ненормированным собственным вектором  (т.е.
(т.е.  ). Направленный опорный сигнал, сгенерированный с использованием набора нормированных собственных векторов для основной широкополосной собственной моды, затем может быть отправлен передатчиком и использован в приемнике для вывода согласованного фильтра для режима направленного луча.
). Направленный опорный сигнал, сгенерированный с использованием набора нормированных собственных векторов для основной широкополосной собственной моды, затем может быть отправлен передатчиком и использован в приемнике для вывода согласованного фильтра для режима направленного луча.
[1107] Для режима направленного луча направленный опорный сигнал нисходящей линии, передаваемый по основной широкополосной собственной моде точкой доступа, может быть выражен как:

где представляет собой нормированный собственный вектор для k-го поддиапазонаосновной широкополосной собственной моды, который может быть выражен как:

где А представляет собой константу (например, А=1); и
 представляет собой фазу для k-го поддиапазона i-й передающей антенны, которая может быть выражена как:
представляет собой фазу для k-го поддиапазона i-й передающей антенны, которая может быть выражена как:

[1108] Как показано в уравнении (15), Nap элементов вектора имеют одинаковые величины, но, возможно, различные фазы. Как показано в уравнении (16), фазу каждого элемента в векторе получают из соответствующего элемента вектора  (т.е.,
(т.е.,  получают из
получают из  , где
, где  ).
).
[1109] Принятый направленный опорный сигнал нисходящей линии в пользовательском терминале для режима направленного луча может быть выражен как:

С. Направленный опорный сигнал восходящей линии - Режим пространственного мультиплексирования
[1110] Для режима пространственного мультиплексирования направленный опорный сигнал восходящей линии, передаваемый по m-й широкополосной собственной моде пользовательским терминалом, может быть выражен как:

Вектор  представляет собой m-й столбец матрицы
представляет собой m-й столбец матрицы  где
где 
[1111] Принятый направленный опорный сигнал восходящей линии в точке доступа для режима пространственного мультиплексирования может быть выражен как:

D. Направленный опорный сигнал восходящей линии - Режим направленного луча
[1112] Для режима направленного луча направленный опорный сигнал восходящей линии, передаваемый по основной широкополосной собственной моде пользовательским терминалом, может быть выражен как:

Нормированный собственный вектор  для k-го поддиапазона основной широкополосной собственной моды может быть выражен как:
для k-го поддиапазона основной широкополосной собственной моды может быть выражен как:

где

Как показано в уравнении (22) фазу каждого элемента в векторе получают из соответствующего элемента собственного вектора 
[1113] Принятый направленный опорный сигнал восходящей линии в точке доступа для режима направленного луча может быть выражен как:

[1114] В таблице 8 сведены способы пространственной обработки в точке доступа и пользовательском терминале для режима пространственного мультиплексирования и режима направленного луча.
Пространственная обработка для направленного опорного сигнала



Е. Передача направленного опорного сигнала
[1115] Для иллюстративной структуры кадра, показанной на Фиг.2, направленный опорный сигнал может передаваться в преамбуле части или части пилот-сигнала FCH PDU (для нисходящей линии) или RCH PDU (для восходящей линии). Направленный опорный сигнал может передаваться различными способами.
[1116] В одном из вариантов осуществления для режима пространственного мультиплексирования направленный опорный сигнал передают для одной или нескольких широкополосных собственных мод для каждого TDD кадра. Конкретное количество широкополосных собственных мод для передачи в каждом TDD кадре может зависеть от продолжительности направленного опорного сигнала. В таблице 9 перечислены широкополосные собственные моды, используемые для направленного опорного сигнала в преамбуле FCH/RCH PDU для различных размеров преамбулы, для случая иллюстративного варианта осуществления с четырьмя передающими антеннами.
[1117] Как показано в таблице 9, направленный опорный сигнал передают по всем четырем широкополосным собственным модам в одном TDD кадре, если размер преамбулы составляет четыре или восемь периодов символов. Направленный опорный сигнал, передаваемый в преамбуле FCH PDU точкой доступа для n-го периода символа, может быть выражен как:

где L представляет собой размер преамбулы (например, L=0, 1, 4 или 8) для иллюстративного варианта осуществления, показанного в таблице 9.
[1118] Направленный опорный сигнал, передаваемый в преамбуле, RCH PDU пользовательским терминалом для n-го периода символа, может быть выражен как:

[1119] В уравнениях (24) и (25) четыре широкополосные собственные моды циклически размещаются в каждом из четырех периодов символов при помощи операции "mod" для направляющего вектора. Эта схема может быть использована, если канал изменяется сравнительно быстро и/или во время начальной части коммуникационной сессии, когда для надлежащей работы системы необходимо быстро получить хорошую оценку канала.
[1120] В другом варианте осуществления направленный опорный сигнал передают для одной широкополосной собственной моды в каждом TDD кадре. Направленный опорный сигнал для четырех широкополосных собственных мод может быть циклически размещен в четырех TDD кадрах. Например, направляющие вектора 
 ,
,  и
и  могут использоваться пользовательским терминалом для четырех последовательных TDD кадров. Конкретный направляющий вектор для использования для направленного опорного сигнала в каждом TDD кадре может быть определен счетчиком кадров, который может передаваться в BCH сообщении. Эта схема может позволить использовать более короткую преамбулу для FCH PDU и RCH PDU. Однако для получения хорошей оценки канала может потребоваться более длинный временной интервал.
могут использоваться пользовательским терминалом для четырех последовательных TDD кадров. Конкретный направляющий вектор для использования для направленного опорного сигнала в каждом TDD кадре может быть определен счетчиком кадров, который может передаваться в BCH сообщении. Эта схема может позволить использовать более короткую преамбулу для FCH PDU и RCH PDU. Однако для получения хорошей оценки канала может потребоваться более длинный временной интервал.
[1121] Для режима направленного луча для направленного опорного сигнала используется нормированный направляющий вектор для основной широкополосной собственной моды, как показано в уравнениях (14) и (20). Длительность направленного опорного сигнала может быть выбрана, например, основываясь на состоянии канала.
[1122] При работе в режиме направленного луча пользовательский терминал может передавать множество символов направленного опорного сигнала, например, один или несколько символов, используя нормированный собственный вектор  один или несколько символов, используя собственный вектор
один или несколько символов, используя собственный вектор  для основной собственной моды, и, возможно, один или несколько символов, используя собственные вектора для других собственных мод. Символы направленного опорного сигнала, генерируемые с
для основной собственной моды, и, возможно, один или несколько символов, используя собственные вектора для других собственных мод. Символы направленного опорного сигнала, генерируемые с  могут быть использованы в точке доступа для вывода вектора согласованного фильтра восходящей линии. Этот вектор используется в точке доступа для выполнения согласованной фильтрации передачи данных по восходящей линии, отправленной пользовательским терминалом с использованием направленного луча. Символы направленного опорного сигнала, генерируемые с
могут быть использованы в точке доступа для вывода вектора согласованного фильтра восходящей линии. Этот вектор используется в точке доступа для выполнения согласованной фильтрации передачи данных по восходящей линии, отправленной пользовательским терминалом с использованием направленного луча. Символы направленного опорного сигнала, генерируемые с  могут быть использованы для получения
могут быть использованы для получения  который затем может быть использован для вывода нормированного собственного вектора
который затем может быть использован для вывода нормированного собственного вектора  который используют для направления луча по нисходящей линии. Символы направленного опорного сигнала, генерируемые с собственными векторами -
который используют для направления луча по нисходящей линии. Символы направленного опорного сигнала, генерируемые с собственными векторами - для других собственных мод, могут быть использованы в точке доступа для получения
для других собственных мод, могут быть использованы в точке доступа для получения  -
- и оценок сингулярных значений для указанных других собственных мод. Затем эта информация может быть использована в точке доступа для определения, использовать ли режим пространственного мультиплексирования или режим направленного луча для передачи данных по нисходящей линии.
и оценок сингулярных значений для указанных других собственных мод. Затем эта информация может быть использована в точке доступа для определения, использовать ли режим пространственного мультиплексирования или режим направленного луча для передачи данных по нисходящей линии.
[1123] В случае нисходящей линии пользовательский терминал может вывести вектор согласованного фильтра нисходящей линии для режима направленного луча, основываясь на оценке отклика калиброванного канала нисходящей линии,  В частности, пользовательский терминал получает из разложения
В частности, пользовательский терминал получает из разложения  по сингулярным значениям и затем может вывести нормированный собственный вектор
по сингулярным значениям и затем может вывести нормированный собственный вектор  Затем пользовательский терминал может выполнить умножение
Затем пользовательский терминал может выполнить умножение  на
на  для получения
для получения  и затем может вывести вектор согласованного фильтра нисходящей линии для режима направленного луча, основываясь на
и затем может вывести вектор согласованного фильтра нисходящей линии для режима направленного луча, основываясь на  В качестве альтернативы, направленный опорный сигнал может быть передан точкой доступа, используя нормированный собственный вектор и этот направленный опорный сигнал может быть обработан в пользовательском терминале способом, описанным выше, для получения вектора согласованного фильтра нисходящей линии для режима направленного луча.
В качестве альтернативы, направленный опорный сигнал может быть передан точкой доступа, используя нормированный собственный вектор и этот направленный опорный сигнал может быть обработан в пользовательском терминале способом, описанным выше, для получения вектора согласованного фильтра нисходящей линии для режима направленного луча.
F. Мультиплексирование поддиапазонов для направленного опорного сигнала
[1124] Как для режима пространственного мультиплексирования, так и для режима направленного луча направленный опорный сигнал также может передаваться для множества широкополосных собственных мод в данный период символа, используя мультиплексирование поддиапазонов. Используемые поддиапазоны могут быть разделены на множество непересекающихся наборов поддиапазонов, один набор для каждой широкополосной собственной моды, выбранной для передачи направленного опорного сигнала. Каждый набор поддиапазонов затем может быть использован для передачи направленного опорного сигнала для связанной широкополосной собственной моды. Для простоты термин "широкополосная собственная мода" используется в настоящем описании, даже если направленный опорный сигнал передают только по подмножеству всех используемых поддиапазонов.
[1125] Например, направленный опорный сигнал может передаваться по всем четырем собственным модам в одном периоде символа. В этом случае 52 используемых поддиапазона могут быть разделены на четыре непересекающихся набора (например, обозначенные, как наборы 1, 2, 3 и 4), причем каждый из них включает в себя 13 поддиапазонов. 13 поддиапазонов в каждом наборе могут быть равномерно распределены по 52 используемым поддиапазонам. Направленный опорный сигнал для основной широкополосной собственной моды при этом может передаваться по 13 поддиапазонам в наборе 1, направленный опорный сигнал для второй широкополосной собственной моды может передаваться по 13 поддиапазонам в наборе 2, направленный опорный сигнал для третьей широкополосной собственной моды может передаваться по 13 поддиапазонам в наборе 3, и направленный опорный сигнал для четвертой широкополосной собственной моды может передаваться по 13 поддиапазонам в наборе 4.
[1126] Если направленный опорный сигнал передают только по подмножеству всех используемых поддиапазонов для данной широкополосной собственной моды, то для получения оценок для поддиапазонов, неиспользуемых при передаче направленного опорного сигнала для этой широкополосной собственной моды, может использоваться интерполяция или какой-либо другой способ.
[1127] В общем случае, множество наборов поддиапазонов включают в себя одинаковое или разное количество поддиапазонов. Например, количество поддиапазонов, включаемое в каждый набор, может зависеть от ОСШ широкополосной собственной моды, связанной с данным набором (например, большее количество поддиапазонов может быть назначено для набора, связанного с широкополосной собственной модой, имеющей более низкое качество). Помимо этого поддиапазоны в каждом наборе могут быть равномерно или неравномерно распределены по используемым поддиапазонам. Множество наборов поддиапазонов также могут быть связаны с одинаковыми или разными наборами пилотных символов.
[1128] Мультиплексирование поддиапазонов может использоваться для уменьшения объема служебной информации, необходимой для передачи направленного опорного сигнала, что может улучшить эффективность системы.
G. Оценка канала при помощи направленного опорного сигнала
[1129] Как показано в уравнении (13), в пользовательском терминале принятый направленный опорный сигнал нисходящей линии для режима пространственного мультиплексирования (в случае отсутствия шума) приблизительно дается, как  . Аналогично, как показано в уравнении (19), в точке доступа принятый направленный опорный сигнал восходящей линии для режима пространственного мультиплексирования (в случае отсутствия шума) приблизительно дается, как
. Аналогично, как показано в уравнении (19), в точке доступа принятый направленный опорный сигнал восходящей линии для режима пространственного мультиплексирования (в случае отсутствия шума) приблизительно дается, как  Таким образом, точка доступа может получить оценку
Таким образом, точка доступа может получить оценку  и
и  основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом и наоборот.
основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом и наоборот.
[1130] Для обработки направленного опорного сигнала могут использоваться различные способы. Для простоты нижеследующее описание приводится для случая обработки направленного опорного сигнала восходящей линии. Принятый вектор в точке доступа дается уравнением (19), а именно 
[1131] В одном из вариантов осуществления для получения оценки принятый вектор  для направленного опорного сигнала, переданного по m-й широкополосной собственной моде, сначала умножают на результат комплексного сопряжения пилотного символа,
для направленного опорного сигнала, переданного по m-й широкополосной собственной моде, сначала умножают на результат комплексного сопряжения пилотного символа,  , который используется для направленного опорного сигнала. Затем результат может быть интегрирован по множеству принятых символов направленного опорного сигнала для каждой широкополосной собственной моды для получения оценки
, который используется для направленного опорного сигнала. Затем результат может быть интегрирован по множеству принятых символов направленного опорного сигнала для каждой широкополосной собственной моды для получения оценки  , которая представляет собой масштабированный левый собственный вектор
, которая представляет собой масштабированный левый собственный вектор  для m-й широкополосной собственной моды. Каждый из Nap элементов вектора получают, основываясь на соответствующем одном из Nap элементов вектора
для m-й широкополосной собственной моды. Каждый из Nap элементов вектора получают, основываясь на соответствующем одном из Nap элементов вектора  где Nap элементов
где Nap элементов  представляют собой символы, принятые от Nap антенн в точке доступа. Поскольку собственные вектора имеют единичную мощность, сингулярное значение
представляют собой символы, принятые от Nap антенн в точке доступа. Поскольку собственные вектора имеют единичную мощность, сингулярное значение  может быть оценено, основываясь на принятой мощности направленного опорного сигнала, которая может быть измерена для каждого поддиапазона каждой широкополосной собственной моды. Оценка
может быть оценено, основываясь на принятой мощности направленного опорного сигнала, которая может быть измерена для каждого поддиапазона каждой широкополосной собственной моды. Оценка  сингулярного значения при этом равна корню квадратному из принятой мощности, деленному на величину пилотного символа
сингулярного значения при этом равна корню квадратному из принятой мощности, деленному на величину пилотного символа 
[1132] В другом варианте осуществления для получения оценки вектора  основываясь на принятом векторе для направленного опорного сигнала, используют способ минимальной среднеквадратичной ошибки (MMSE). Поскольку пилотные символы
основываясь на принятом векторе для направленного опорного сигнала, используют способ минимальной среднеквадратичной ошибки (MMSE). Поскольку пилотные символы  являются известными, точка доступа может вывести оценку таким образом, что среднеквадратичная ошибка между принятыми пилотными символами (полученными после выполнения согласованной фильтрации принятого вектора ) и переданными пилотными символами является минимальной. Использование способа MMSE для пространственной обработки в приемнике описано в заявке на патент США №09/993,087, озаглавленной "Multiple-Access Multiple-Input Multiple-Output (MIMO) Communication System", поданной 6 ноября 2001 г.
являются известными, точка доступа может вывести оценку таким образом, что среднеквадратичная ошибка между принятыми пилотными символами (полученными после выполнения согласованной фильтрации принятого вектора ) и переданными пилотными символами является минимальной. Использование способа MMSE для пространственной обработки в приемнике описано в заявке на патент США №09/993,087, озаглавленной "Multiple-Access Multiple-Input Multiple-Output (MIMO) Communication System", поданной 6 ноября 2001 г.
[1133] Направленный опорный сигнал передают для одной широкополосной собственной моды в любой данный период символа (без мультиплексирования поддиапазонов), который, в свою очередь, может быть использован для получения оценки одного собственного вектора для каждого поддиапазона этой широкополосной собственной моды. Таким образом, приемник имеет возможность получить оценку только одного собственного вектора в унитарной матрице для любого данного периода символа. Поскольку оценки множества собственных векторов для унитарной матрицы получают в различные периоды символов и вследствие наличия шума и других источников искажений в беспроводном канале, оцененные собственные вектора для унитарной матрицы (которые выведены по отдельности) могут не являться взаимно ортогональными. Оцененные собственные вектора могут быть использованы для согласованной фильтрации передачи данных, принятой по той же линии, и/или пространственной обработки передачи данных, отправляемой по другой линии. В этом случае любые ошибки в ортогональности этих оцененных собственных векторов приводят к перекрестным помехам между потоками данных, передаваемых по собственным модам, соответствующим собственным векторам. Перекрестные помехи могут ухудшать производительность.
[1134] В одном из вариантов осуществления оцененные собственные вектора для каждой унитарной матрицы приводят к взаимно ортогональному виду. Ортогонализация собственных векторов может быть достигнута при помощи использования способа Грэма-Шмидта, который подробно описан в вышеупомянутой ссылке Gilbert Strang, или какого-либо другого способа.
[1135] Для обработки направленного опорного сигнала также могут использоваться другие способы, и это находится в пределах объема настоящего изобретения.
[1136] Таким образом, точка доступа может оценивать как  так и
так и  основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом без необходимости оценки отклика канала восходящей линии или выполнения разложения по сингулярным значениям.
основываясь на направленном опорном сигнале, передаваемом пользовательским терминалом без необходимости оценки отклика канала восходящей линии или выполнения разложения по сингулярным значениям.
[1137] Обработка в пользовательском терминале для оценки матриц  и
и  для k∈K, исходя из направленного опорного сигнала нисходящей линии, может быть выполнена аналогично описанной выше для направленного опорного сигнала восходящей линии.
для k∈K, исходя из направленного опорного сигнала нисходящей линии, может быть выполнена аналогично описанной выше для направленного опорного сигнала восходящей линии.
[1138] Для режима направленного луча в случае восходящей линии принятый вектор  для направленного опорного сигнала может быть обработан в точке доступа аналогичным способом для получения оценки
для направленного опорного сигнала может быть обработан в точке доступа аналогичным способом для получения оценки  Транспонирование с комплексным сопряжением этой оценки дает согласованный фильтр для передачи по восходящей линии в режиме направленного луча. В случае нисходящей линии принятый вектор
Транспонирование с комплексным сопряжением этой оценки дает согласованный фильтр для передачи по восходящей линии в режиме направленного луча. В случае нисходящей линии принятый вектор  для направленного опорного сигнала может быть обработан в пользовательском терминале аналогичным способом для получения оценки
для направленного опорного сигнала может быть обработан в пользовательском терминале аналогичным способом для получения оценки  Транспонирование с комплексным сопряжением этой оценки дает согласованный фильтр для передачи по нисходящей линии в режиме направленного луча.
Транспонирование с комплексным сопряжением этой оценки дает согласованный фильтр для передачи по нисходящей линии в режиме направленного луча.
5. Пилот-сигнал несущей
[1139] Пилот-сигнал несущей может быть передан на поддиапазонах пилот-сигналов различными способами для структуры TDD кадра, показанной на Фиг.2. В одном из вариантов настоящего изобретения четыре пилотные последовательности переустанавливают для каждого транспортного канала. Таким образом, для нисходящей линии пилотные последовательности переустанавливают для первого OFDM символа BCH сообщения, снова переустанавливают для первого OFDM символа FCCH сообщения и переустанавливают для первого OFDM символа, отправляемого по FCH. В другом варианте осуществления пилотные последовательности переустанавливают в начале каждого TDD кадра и повторяют настолько часто, насколько это необходимо. Для такого варианта осуществления пилотные последовательности могут быть блокированы на время частей преамбул BCH и FCH. Пилот-сигнал несущей также может передаваться другими способами, и это находится в пределах объема настоящего изобретения.
6. Схема передачи пилот-сигнала
[1140] Четыре типа пилот-сигналов описаны выше и могут использоваться для MIMO и MIMO-OFDM систем. Эти четыре различных типа пилот-сигналов могут передаваться различными способами.
[1141] На Фиг.3 показаны передачи пилот-сигнала по нисходящей линии и восходящей линии для иллюстративной схемы передачи пилот-сигнала. В общем случае, блок 310 соответствует фазе доступа в систему, блок 320 соответствует фазе калибровки, и блок 330 соответствует фазе нормальной работы.
[1142] Пилот-сигнал маяка и MIMO пилот-сигнал передаются по нисходящей линии точкой доступа в каждом TDD кадре (блок 312), чтобы предоставить возможность всем пользовательским терминалам в системе получить частоту и таймирование системы и выполнить оценку канала нисходящей линии (блок 314). Блок 314 может быть выполнен при необходимости доступа в систему.
[1143] Калибровка может быть выполнена до начала нормальной работы для того, чтобы произвести калибровку различий в передающих/приемных цепях в точке доступа и пользовательском терминале. Для калибровки MIMO пилот-сигналы могут передаваться как точкой доступа, так и пользовательским терминалом (блоки 322 и 326). MIMO пилот-сигнал восходящей линии может быть использован в точке доступа для выведения оценки канала восходящей линии (блок 324), и MIMO пилот-сигнал нисходящей линии может быть использован в пользовательском терминале для выведения или обновления оценки канала нисходящей линии (блок 328). Оценки каналов нисходящей линии и восходящей линии затем используются для выведения поправочных факторов для точки доступа и пользовательского терминала.
[1144] Во время нормальной работы направленный опорный сигнал может передаваться по восходящей линии пользовательским терминалом (1), если и когда он требует передачу данных или (2) если он запланирован для передачи данных (блок 332). Направленный опорный сигнал восходящей линии может использоваться в точке доступа для оценки соответствующих унитарных и диагональных матриц для пользовательского терминала (блок 334). Направленный опорный сигнал необязательно может передаваться точкой доступа в пользовательский терминал (как показано блоком 336, выполненном пунктирными линиями). Пользовательский терминал может непрерывно обновлять свою оценку канала нисходящей линии, основываясь на MIMO пилот-сигнале нисходящей линии, и обновлять соответствующие унитарные диагональные матрицы, основываясь на направленном опорном сигнале нисходящей линии (если он передается) (блок 338). Пилот-сигналы несущей передаются точкой доступа (блок 340) и пользовательским терминалом (блок 334) в поддиапазонах пилот-сигналов в частях, которые не используются для других пилот-сигналов. Пилот-сигнал несущей нисходящей линии используется в пользовательском терминале для отслеживания фазы сигнала несущей нисходящей линии (блок 342), и пилот-сигнал несущей восходящей линии используется в точке доступа для отслеживания фазы сигнала несущей восходящей линии (блок 346).
[1145] Для схемы передачи пилот-сигнала, показанной на Фиг.3, пользовательский терминал оценивает отклик канала нисходящей линии, основываясь на MIMO пилот-сигнале нисходящей линии, и передает направленный опорный сигнал по восходящей линии, который затем используется в точке доступа для оценки соответствующих унитарных и диагональных матриц для пользовательского терминала. В определенные моменты пользовательский терминал может получить плохую оценку отклика канала нисходящей линии, и в этом случае, направленный опорный сигнал восходящей линии может быть в равной степени плохим или, возможно, даже хуже. В худшем случае направляющий вектор, используемый в пользовательском терминале, может привести в результате к тому, что на точку доступа будет направлена нулевая часть луча. В этом случае точка доступа не сможет детектировать направленный опорный сигнал восходящей линии. Чтобы избежать такой ситуации, пользовательский терминал может внести случайные изменения в фазы Nut элементов направляющего вектора, который он использует для направленного опорного сигнала, в ситуациях, когда он обнаруживает, что точка доступа не принимает должным образом направленный опорный сигнал. Например, если пользовательский терминал передает направленный опорный сигнал восходящей линии в качестве части процедуры доступа в систему, и если доступ в систему не получен после конкретного количества попыток доступа, то пользовательский терминал может начать вносить случайные изменения в фазы элементов направляющего вектора.
[1146] Для MIMO и MIMO-OFDM систем также могут быть реализованы различные другие схемы передачи пилот-сигнала, и это находится в пределах объема настоящего изобретения. Например, пилот-сигнал маяка и пилот-сигнал несущей могут быть комбинированы в один пилот-сигнал, который может быть использован для получения частоты и таймирования и отслеживания фазы несущей. В качестве другого примера активные пользовательские терминалы могут передавать по восходящей линии MIMO пилот-сигналы вместо направленных опорных сигналов.
IV. MIMO-OFDM система
[1147] На Фиг.4 показана блок-схема варианта осуществления точки 110х доступа и пользовательского терминала 120х в MIMO-OFDM системе 100. Для простоты в этом варианте осуществления точка 110х доступа оборудована четырьмя антеннами, которые могут использоваться для передачи и приема данных, и пользовательский терминал 120х также оборудован четырьмя антеннами для передачи/приема данных. В общем случае, точка доступа и пользовательский терминал могут быть оборудованы любым количеством передающих антенн и любым количеством приемных антенн.
[1148] В случае нисходящей линии в точке 110х доступа передающий (TX) процессор 414 данных принимает данные трафика из источника 412 данных и сигнализацию, и другие данные из контроллера 430. TX процессор 414 данных форматирует, кодирует, выполняет перемежение и модуляцию (т.е. отображение символов) данных для обеспечения символов модуляции. TX пространственный процессор 420 принимает и мультиплексирует символы модуляции из TX процессора 414 данных с пилотными символами и выполняет требуемую пространственную обработку и предоставляет четыре потока символов передачи для четырех передающих антенн.
[1149] Каждый модулятор (MOD) 422 принимает и обрабатывает соответствующий поток символов передачи для предоставления соответствующего модулированного сигнала нисходящей линии. Затем четыре модулированных сигнала из модулятора 422а-422d передаются через четыре антенны 424а-424d, соответственно.
[1150] В пользовательском терминале 120х четыре антенны 452а-452d принимают переданные модулированные сигналы нисходящей линии, и каждая антенна предоставляет принятый сигнал в соответствующий демодулятор (DEMOD) 454. Каждый демодулятор 454 выполняет обработку, комплементарную выполняемой в модуляторе 422, и предоставляет принятые символы. Приемный (RX) пространственный процессор 460 затем выполняет пространственную обработку принятых символов из всех демодуляторов 454а-454d для обеспечения восстановленных символов, которые представляют собой оценки символов модуляции, переданных точкой доступа. RX процессор 470 данных дополнительно обрабатывает (например, выполняет обратное отображение символов, обратное перемежение и декодирование) восстановленные символы для обеспечения декодированных данных, которые могут быть предоставлены в потребитель 472 данных для сохранения и/или в контроллер 480 для дальнейшей обработки.
[1151] Обработка для восходящей линии может быть такой же или отличающейся от обработки для нисходящей линии. Данные и сигнализация обрабатываются (т.е. выполняется кодирование, перемежение и модуляция) в ТХ процессоре 488 данных, мультиплексируются с пилотными символами и дополнительно подвергаются пространственной обработке в ТХ пространственном процессоре 490. Символы передачи из ТХ пространственного процессора 490 далее обрабатываются в модуляторах 454а-454d для генерации четырех модулированных сигналов нисходящей линии, которые затем передаются через антенны 452а-452d.
[1152] В точке 410 доступа модулированные сигналы восходящей линии принимаются антеннами 424а-424d, демодулируются в демодуляторах 422а-422d и обрабатываются в RX пространственном процессоре 440 и RX процессоре 442 данных способом, комплементарным выполняемому в пользовательском терминале. Декодированные данные восходящей линии могут быть направлены в потребитель 444 данных для сохранения и/или в контроллер 430 для дальнейшей обработки.
[1153] Контроллеры 430 и 480 управляют работой различных блоков обработки в точке доступа и пользовательском терминале, соответственно. Запоминающие устройства 432 и 482 хранят данные и коды программ, используемые контроллерами 430 и 480, соответственно.
[1154] На Фиг.5 показана блок-схема TX пространственного процессора 420a, выполненного с возможностью генерации пилот-сигнала маяка, и который может быть реализован в качестве ТХ пространственного процессора 420 по Фиг.4. Процессор 420а включает в себя несколько процессоров 510a-510k поддиапазонов пилот-сигнала маяка, один для каждого поддиапазона, используемого для передачи пилот-сигнала маяка. Каждый процессор 510 поддиапазона принимает пилотный символ  для пилот-сигнала маяка и поправочную матрицу
для пилот-сигнала маяка и поправочную матрицу  для связанного поддиапазона.
для связанного поддиапазона.
[1155] В каждом процессоре 510 поддиапазона пилотный символ  масштабируется в четырех умножителях 514a-514d на четыре поправочных фактора
масштабируется в четырех умножителях 514a-514d на четыре поправочных фактора 
 соответственно, из матрицы
соответственно, из матрицы  . Каждый умножитель 514 выполняет комплексное умножение комплексного пилотного символа на соответствующий комплексный поправочный фактор. Масштабированные пилотные символы из умножителей 514a-514d затем направляются в четыре буфера/мультиплексора 520a-520d, соответственно, которые также принимают масштабированные пилотные символы из других процессоров 510 поддиапазонов. Каждый буфер/мультиплексор 520 мультиплексирует масштабированные пилотные символы для всех поддиапазонов, используемых для передачи пилот-сигнала маяка и нулевые значения сигналов для неиспользуемых поддиапазонов, и предоставляет поток символов передачи в соответствующую передающую антенну.
. Каждый умножитель 514 выполняет комплексное умножение комплексного пилотного символа на соответствующий комплексный поправочный фактор. Масштабированные пилотные символы из умножителей 514a-514d затем направляются в четыре буфера/мультиплексора 520a-520d, соответственно, которые также принимают масштабированные пилотные символы из других процессоров 510 поддиапазонов. Каждый буфер/мультиплексор 520 мультиплексирует масштабированные пилотные символы для всех поддиапазонов, используемых для передачи пилот-сигнала маяка и нулевые значения сигналов для неиспользуемых поддиапазонов, и предоставляет поток символов передачи в соответствующую передающую антенну.
[1156] На Фиг.6А показана блок-схема TX пространственного процессора 420b, выполненного с возможностью генерации MIMO пилот-сигнала. Процессор 420b может быть реализован в качестве TX пространственного процессора 420b или 490 по Фиг.4, но для простоты описан ниже для реализации в качестве ТХ пространственного процессора 420. Процессор 420b включает в себя несколько процессоров 610a-610k поддиапазонов MIMO пилот-сигнала, по одному для каждого поддиапазона, используемого для передачи MIMO пилот-сигнала. Каждый процессор 610 поддиапазона принимает пилотный символ  для MIMO пилот-сигнала и поправочную матрицу для соответствующего поддиапазона. Каждый процессор 610 поддиапазона также принимает четыре последовательности Уолша,
для MIMO пилот-сигнала и поправочную матрицу для соответствующего поддиапазона. Каждый процессор 610 поддиапазона также принимает четыре последовательности Уолша,  , назначенные четырем передающим антеннам в точке доступа.
, назначенные четырем передающим антеннам в точке доступа.
[1157] В каждом процессоре 610 поддиапазона комплексный пилотный символ  покрывают четырьмя последовательностями Уолша,
покрывают четырьмя последовательностями Уолша,  , в четырех комплексных умножителях 612a-612d, соответственно. Покрытые пилотные символы далее масштабируются в четырех комплексных умножителях 614a-614d на четыре комплексных поправочных фактора
, в четырех комплексных умножителях 612a-612d, соответственно. Покрытые пилотные символы далее масштабируются в четырех комплексных умножителях 614a-614d на четыре комплексных поправочных фактора 
 соответственно, из матрицы . Масштабированные пилотные символы из умножителей 614a-614d затем предоставляются в четыре буфера/мультиплексора 620a-620d, соответственно. Последующая обработка является такой же, как описано выше для Фиг.5.
соответственно, из матрицы . Масштабированные пилотные символы из умножителей 614a-614d затем предоставляются в четыре буфера/мультиплексора 620a-620d, соответственно. Последующая обработка является такой же, как описано выше для Фиг.5.
[1158] Для одного из вариантов осуществления процессоров 420b в TX пространственном процессоре 490 количество используемых последовательностей Уолша зависит от количества передающих антенн, доступных в пользовательском терминале. Помимо этого масштабирование выполняется с поправочными факторами из матрицы  для пользовательского терминала.
для пользовательского терминала.
[1159] На Фиг.6В показана блок-схема RX пространственного процессора 460b, который может выполнять оценку отклика канала, основываясь на принятом MIMO пилот-сигнале. Процессор 460b может быть реализован в RX пространственном процессоре 440 или 460 по Фиг.4, но для простоты описан ниже для случая реализации в RX пространственном процессоре 460. Процессор 460b включает в себя несколько процессоров 650а-650k поддиапазонов MIMO пилот-сигнала, по одному для каждого поддиапазона, используемого для передачи MIMO пилот-сигнала. Каждый процессор 650 поддиапазона MIMO пилот-сигнала принимает вектор  и комплексно сопряженный пилотный символ
и комплексно сопряженный пилотный символ  для соответствующего поддиапазона. Каждый процессор 650 поддиапазона также принимает четыре последовательности Уолша, , назначенные четырем передающим антеннам в точке доступа.
для соответствующего поддиапазона. Каждый процессор 650 поддиапазона также принимает четыре последовательности Уолша, , назначенные четырем передающим антеннам в точке доступа.
[1160] Каждый процессор 650 поддиапазона MIMO пилот-сигнала включает в себя четыре процессора 660а-660d поддиапазона/антенны MIMO пилот-сигнала для четырех приемных антенн в пользовательском терминале. Каждый процессор 660 принимает один элемент  вектора . В каждом процессоре 660 принятый символ
вектора . В каждом процессоре 660 принятый символ  сначала умножают на комплексное сопряжение пилотного символа в комплексном умножителе 662. Выходной сигнал умножителя 662 далее умножают на четыре последовательности Уолша, , в четырех комплексных умножителях 664а-664d, соответственно. Выходные сигналы комплексных умножителей 664а-664d затем суммируют в сумматорах 666а-666d, соответственно, в течение периода передачи MIMO пилот-сигнала. Каждая пара умножитель 664 - сумматор 666 выполняет снятие покрытия для одной передающей антенны в точке доступа. Выходной сигнал из каждого сумматора 666 представляют собой оценку
сначала умножают на комплексное сопряжение пилотного символа в комплексном умножителе 662. Выходной сигнал умножителя 662 далее умножают на четыре последовательности Уолша, , в четырех комплексных умножителях 664а-664d, соответственно. Выходные сигналы комплексных умножителей 664а-664d затем суммируют в сумматорах 666а-666d, соответственно, в течение периода передачи MIMO пилот-сигнала. Каждая пара умножитель 664 - сумматор 666 выполняет снятие покрытия для одной передающей антенны в точке доступа. Выходной сигнал из каждого сумматора 666 представляют собой оценку  усиления канала из передающей антенны j в приемную антенну i для поддиапазона k. Оценки отклика канала
усиления канала из передающей антенны j в приемную антенну i для поддиапазона k. Оценки отклика канала  , для i={1, 2, 3, 4} и j={1, 2, 3, 4}, могут быть дополнительно усреднены по множеству передач MIMO пилот-сигналов, (не показано на Фиг.6В), для обеспечения более точной оценки отклика канала.
, для i={1, 2, 3, 4} и j={1, 2, 3, 4}, могут быть дополнительно усреднены по множеству передач MIMO пилот-сигналов, (не показано на Фиг.6В), для обеспечения более точной оценки отклика канала.
[1161] Как показано на Фиг.6В, каждый процессор 660 поддиапазона/антенны MIMO пилот-сигнала обеспечивает вектор-строку  для соответствующей приемной антенны i, где
для соответствующей приемной антенны i, где  представляет собой i-ю строку оценки отклика калиброванного канала,
представляет собой i-ю строку оценки отклика калиброванного канала,  , для нисходящей линии (предполагая, что в точке доступа была использована его поправочная матрица ). Процессоры 660а-660d совместно обеспечивают четыре строки матрицы отклика калиброванного канала.
, для нисходящей линии (предполагая, что в точке доступа была использована его поправочная матрица ). Процессоры 660а-660d совместно обеспечивают четыре строки матрицы отклика калиброванного канала.
[1162] На Фиг.7А показана блок-схема TX пространственного процессора 420c, выполненного с возможностью генерации направленного опорного сигнала. Процессор 420c также может быть реализован в TX пространственном процессоре 420 или 490 по Фиг.4, но для простоты ниже описан для реализации в TX пространственном процессоре 420. Процессор 420с включает в себя несколько процессоров 710a-710k поддиапазонов направленных опорных сигналов, по одному на каждый поддиапазон, используемый для передачи направленного опорного сигнала. Для генерации направленного опорного сигнала для режима пространственного мультиплексирования каждый процессор 710 поддиапазона принимает пилотный символ , направляющий вектор  для каждой широкополосной собственной моды, по которой должен передаваться направленный пилот-сигнал, и поправочную матрицу для соответствующего поддиапазона.
для каждой широкополосной собственной моды, по которой должен передаваться направленный пилот-сигнал, и поправочную матрицу для соответствующего поддиапазона.
[1163] В каждом процессоре 710 пилотный символ умножают на четыре элемента 
 направляющего вектора m-й широкополосной собственной моды в четырех комплексных умножителях 712a-712d, соответственно. Выходные сигналы из умножителей 712a-712d далее масштабируют в четырех комплексных умножителях 714a-714d на четыре поправочных фактора
направляющего вектора m-й широкополосной собственной моды в четырех комплексных умножителях 712a-712d, соответственно. Выходные сигналы из умножителей 712a-712d далее масштабируют в четырех комплексных умножителях 714a-714d на четыре поправочных фактора  -
- , соответственно, из матрицы . Масштабированные пилотные символы из умножителей 714a-714d затем направляют в четыре буфера/мультиплексора 720a-720d, соответственно. Последующая обработка описана выше.
, соответственно, из матрицы . Масштабированные пилотные символы из умножителей 714a-714d затем направляют в четыре буфера/мультиплексора 720a-720d, соответственно. Последующая обработка описана выше.
[1164] Для генерации направленного опорного сигнала по нисходящей линии для режима направленного луча каждый процессор 710 поддиапазона может принимать нормированный направляющий вектор вместо ненормированного направляющего вектора . Для реализации процессора 420c в TX пространственном процессоре 490 каждый процессор 710 поддиапазона может принимать либо (1) направляющий вектор  для каждой широкополосной собственной моды, используемой для направленного опорного сигнала для режима пространственного мультиплексирования, либо (2) направляющий вектор для режима направленного луча. Если для направленного опорного сигнала используется мультиплексирование поддиапазонов, то направленные векторы для множества широкополосных собственных мод могут быть использованы для множества непересекающихся наборов поддиапазонов, как описано выше.
для каждой широкополосной собственной моды, используемой для направленного опорного сигнала для режима пространственного мультиплексирования, либо (2) направляющий вектор для режима направленного луча. Если для направленного опорного сигнала используется мультиплексирование поддиапазонов, то направленные векторы для множества широкополосных собственных мод могут быть использованы для множества непересекающихся наборов поддиапазонов, как описано выше.
[1165] На Фиг.7В показана блок-схема RX пространственного процессора 460c, выполненного с возможностью предоставления оценок управляющих векторов и сингулярных значений, основываясь на принятом направленном опорном сигнале. Процессор 460с может быть реализован в RX пространственном процессоре 440 или 460 по Фиг.4, но для простоты описан ниже для реализации в RX пространственном процессоре 460. Процессор 460c включает в себя несколько процессоров 750a-750k поддиапазонов направленного опорного сигнала, по одному для каждого поддиапазона, используемого для передачи направленного опорного сигнала. Каждый процессор 750 поддиапазона принимает вектор и комплексное сопряжение пилотного символа для соответствующего поддиапазона.
[1166] В каждом процессоре 750 поддиапазона четыре символа в принятом векторе умножают на комплексное сопряжение пилотного символа в комплексных умножителях 762a-762d, соответственно. Выходные сигналы умножителей 762a-762d затем суммируют в течение длительности передачи направленного опорного сигнала для каждой широкополосной собственной моды в сумматорах 764a-764d, соответственно. Как показано в таблице 9 направленный опорный сигнал может передаваться для множества широкополосных собственных мод в одной передаче направленного опорного сигнала, и в этом случае суммирование выполняют отдельно для каждой из этих широкополосных собственных мод. Однако множество символов направленного опорного сигнала (которые могут передаваться в одной или нескольких передачах направленного опорного сигнала) для любой данной широкополосной собственной моды может суммироваться для получения более высокого качества оценки. Сумматоры 764a-764d предоставляют четыре элемента, которые представляют собой оценки  как показано в уравнении (13).
как показано в уравнении (13).
[1167] Поскольку собственные вектора имеют единичную мощность, сингулярные значения  для каждой широкополосной собственной моды могут быть оценены, основываясь на принятой мощности направленного опорного сигнала. Блок 666 вычисления мощности принимает выходные сигналы умножителей 762-762d и вычисляет принятую мощность направленного опорного сигнала,
для каждой широкополосной собственной моды могут быть оценены, основываясь на принятой мощности направленного опорного сигнала. Блок 666 вычисления мощности принимает выходные сигналы умножителей 762-762d и вычисляет принятую мощность направленного опорного сигнала,  для каждой собственной моды поддиапазона k. Оценка
для каждой собственной моды поддиапазона k. Оценка  сингулярного значения при этом равна корню квадратному из вычисленной принятой мощности направленного опорного сигнала, разделенного на величину пилотного символа (т.е.,
сингулярного значения при этом равна корню квадратному из вычисленной принятой мощности направленного опорного сигнала, разделенного на величину пилотного символа (т.е.,  ), где
), где  и представляет собой символ, принятый в поддиапазоне k приемной антенной i.
и представляет собой символ, принятый в поддиапазоне k приемной антенной i.
[1168] Выходные сигналы сумматоров 766а-766d затем масштабируют на обратную величину оценки сингулярного значения,  , в умножителях 768a-768d, соответственно, для предоставления оценки направляющего вектора для каждой собственной моды,
, в умножителях 768a-768d, соответственно, для предоставления оценки направляющего вектора для каждой собственной моды, 
[1169] Обработка направленного опорного сигнала в случае направленного луча может быть выполнена аналогичным способом. Обработка направленного опорного сигнала восходящей линии также может быть выполнена аналогичным способом для получения оценки направляющего вектора для каждой собственной моды, 
[1170] Пилот-сигналы, рассмотренные в настоящем описании, могут быть реализованы при помощи различных средств. Например, обработка для различных типов пилот-сигналов в точке доступа и пользовательском терминале может быть реализована в виде аппаратных средств, программных средств или их комбинации. В случае реализации в виде аппаратных средств элементы, используемые для обработки пилот-сигналов при передаче и/или приеме, могут быть реализованы в одной или нескольких ориентированных на приложение интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных процессорных устройствах (DSPD), программируемых логических устройствах (PLD), внутрисхемно программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, других электронных блоках, выполненных с возможностью выполнения функций, изложенных в настоящем описании или их комбинации.
[1171] В случае осуществления в виде программных средств некоторые из видов обработки для различных типов пилот-сигналов (например, пространственная обработка при передаче пилот-сигнала и/или оценка канала, основанная на принятом пилот-сигнале) могут быть реализованы при помощи модулей (например, процедур, функций, и т.д.), которые выполняют функции, изложенные в настоящем описании. Программные коды могут храниться в запоминающем устройстве (например, запоминающих устройствах, 432 и 482 по Фиг.4) и выполняться процессором (например, контроллерами 430 и 480). Запоминающее устройство может быть выполнено в процессоре или как внешнее по отношению к процессору, причем в этом случае оно может быть соединено с возможностью обмена данными с процессором при помощи различных средств, известных в данной области техники.
[1172] Заголовки включены в настоящее описание для ссылки и для помощи в поиске определенных разделов. Указанные заголовки не следует рассматривать как ограничивающие объем концепций в озаглавленных ими разделах, и эти концепции могут применяться в других разделах по всему описанию.
[1173] Приведенное выше описание раскрытых вариантов осуществления представлено для того, чтобы дать возможность любому специалисту в данной области техники использовать настоящее изобретение. Различные модификации в отношении указанных вариантов осуществления должны быть очевидны для специалистов в данной области техники, и общие принципы, изложенные в настоящем описании, применимы к другим вариантам осуществления без отступления от сущности и объема настоящего изобретения. Таким образом, настоящее изобретение не ограничивается вариантами осуществления, раскрытыми в настоящем описании, но, напротив, соответствует самому широкому объему, совместимому с принципами и новыми отличительными особенностями, раскрытыми в настоящем описании.
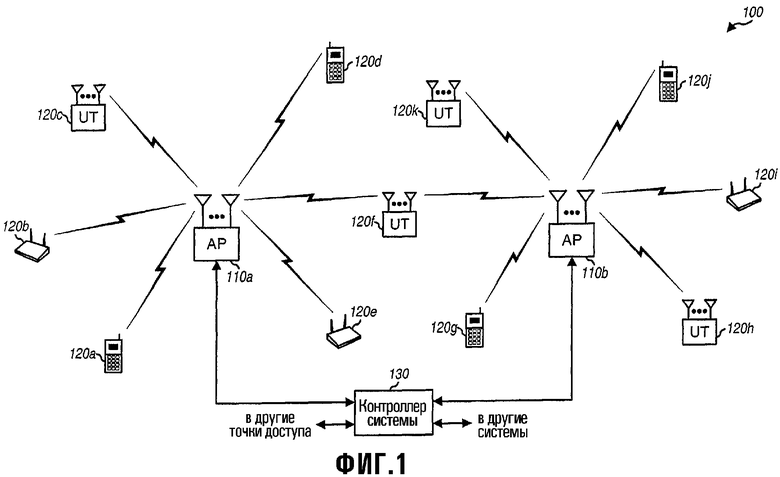
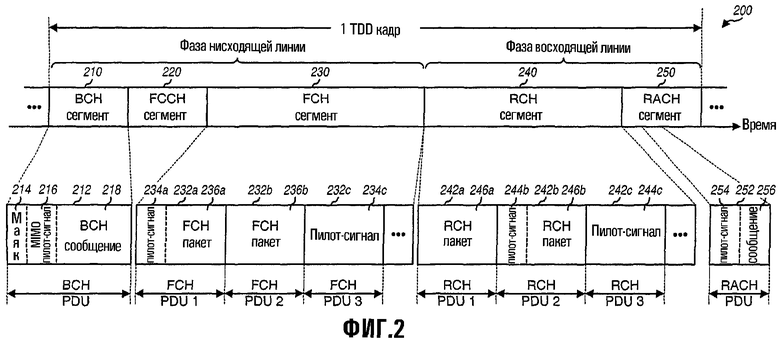
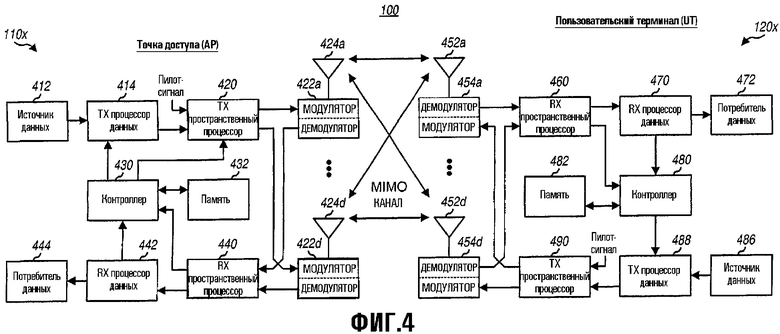
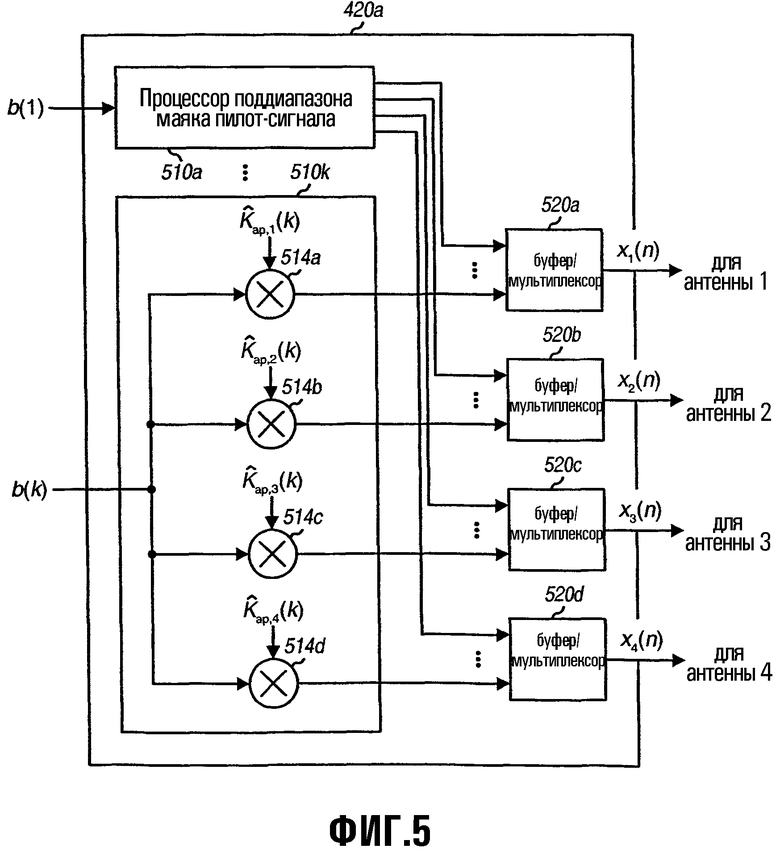
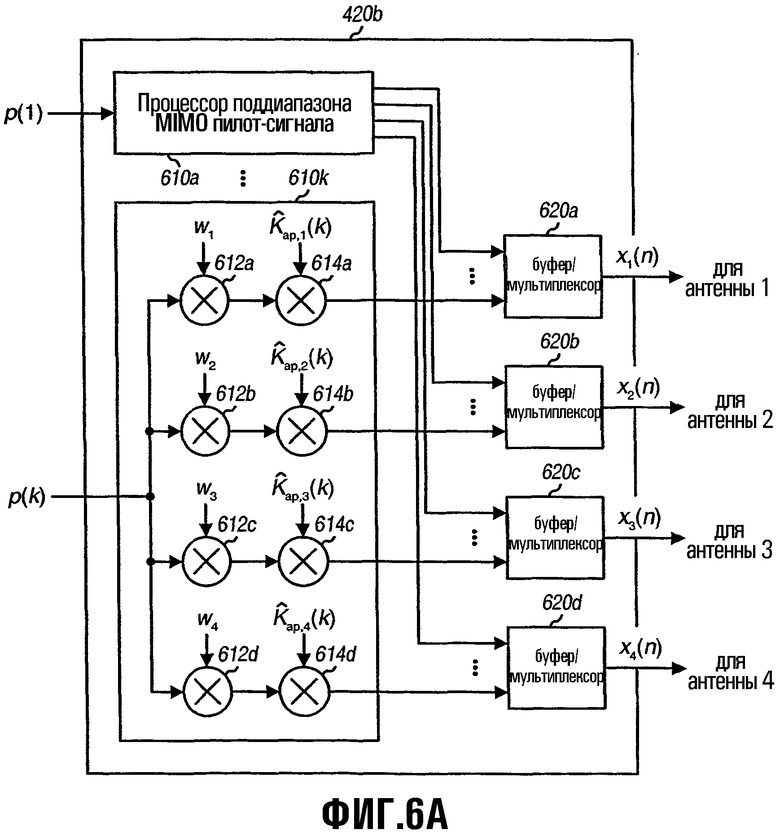
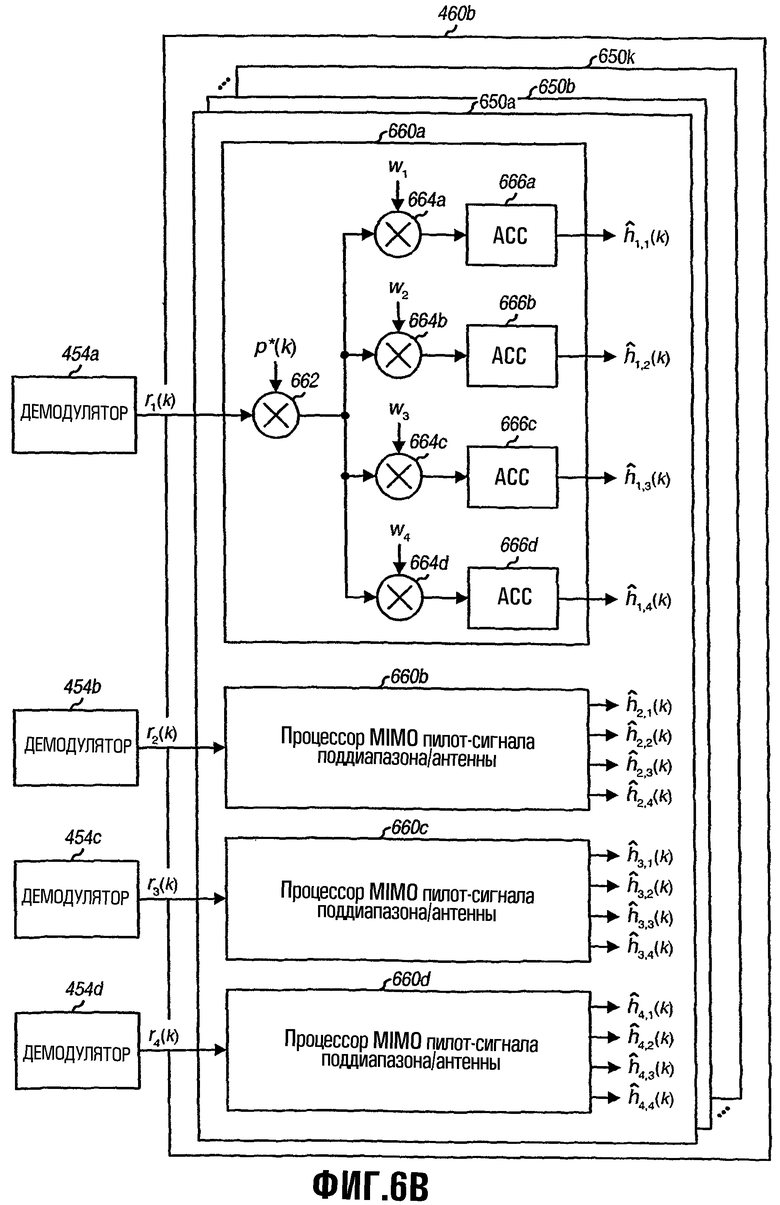
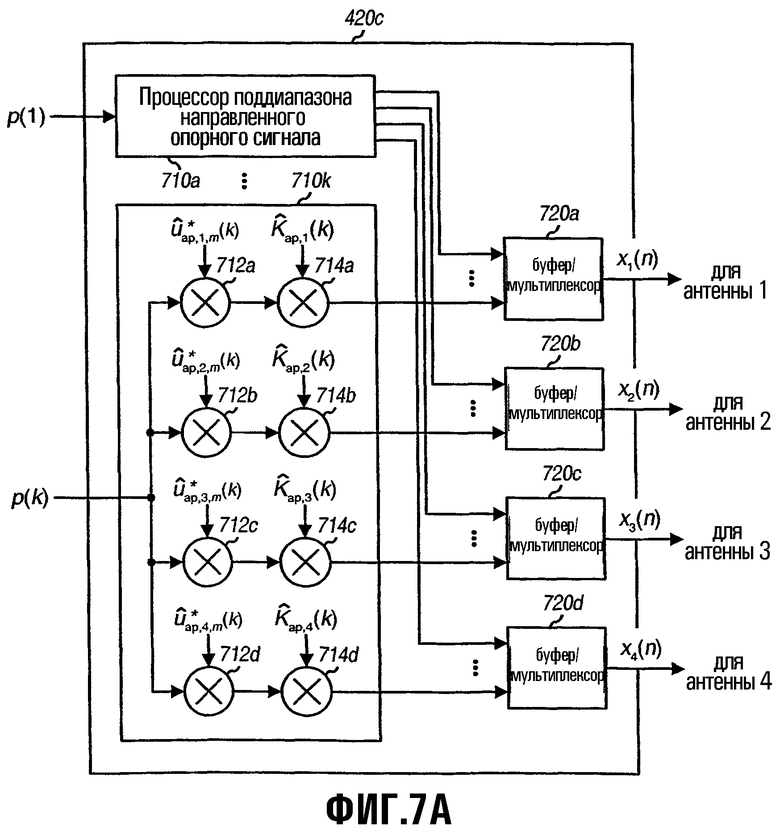
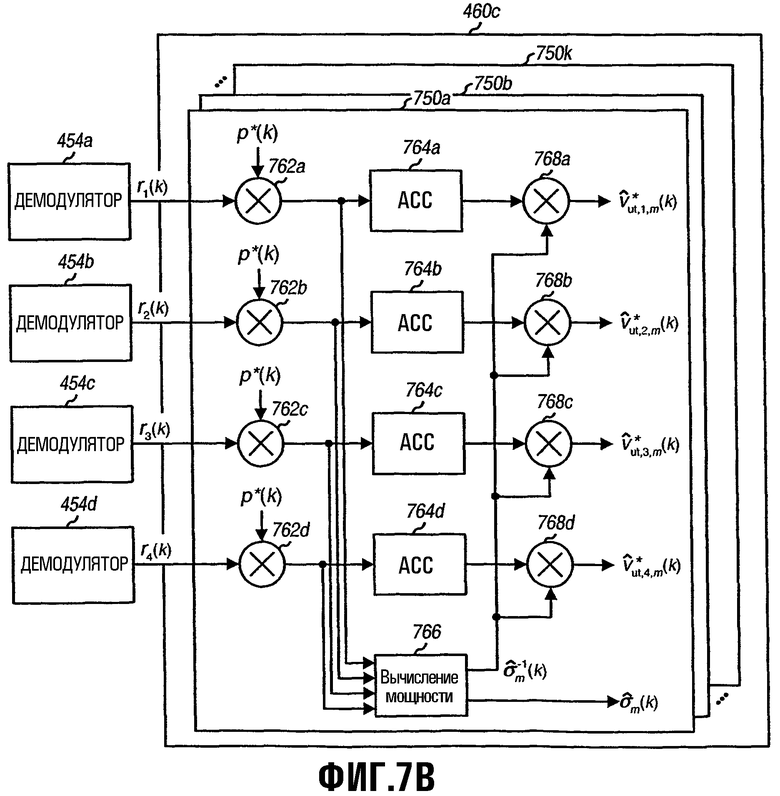
Изобретение относится к технике связи. Технический результат состоит в формировании пилот-сигналов, подходящих для использования в системах MIMO и обеспечивающих поддержку различных функций. Различные типы пилот-сигналов включают в себя - пилот-сигнал маяка, пилот-сигнал MIMO, управляемый опорный сигнал или управляемый пилот-сигнал и пилот-сигнал несущей. Для этого пилот-сигнал маяка передают через все передающие антенны, и он может быть использован для тайминга или захвата частоты. Пилот-сигнал MIMO передают через все передающие антенны, но он покрывается различными ортогональными кодами, назначенными передающим антеннам. Пилот-сигнал MIMO может быть использован для оценки канала. Управляемый опорный сигнал передают в определенных собственных модах канала MIMO, и он является специфическим для пользовательского терминала. Управляемый опорный сигнал может быть использован для оценки канала. Пилот-сигнал несущей может передаваться через определенные поддиапазоны антенны и может использоваться для отслеживания фазы сигнала несущей. Могут быть разработаны различные схемы передачи пилот-сигнала, основываясь на различных комбинациях указанных различных типов пилот-сигналов. 13 н. и 56 з.п. ф-лы, 7 ил., 9 табл.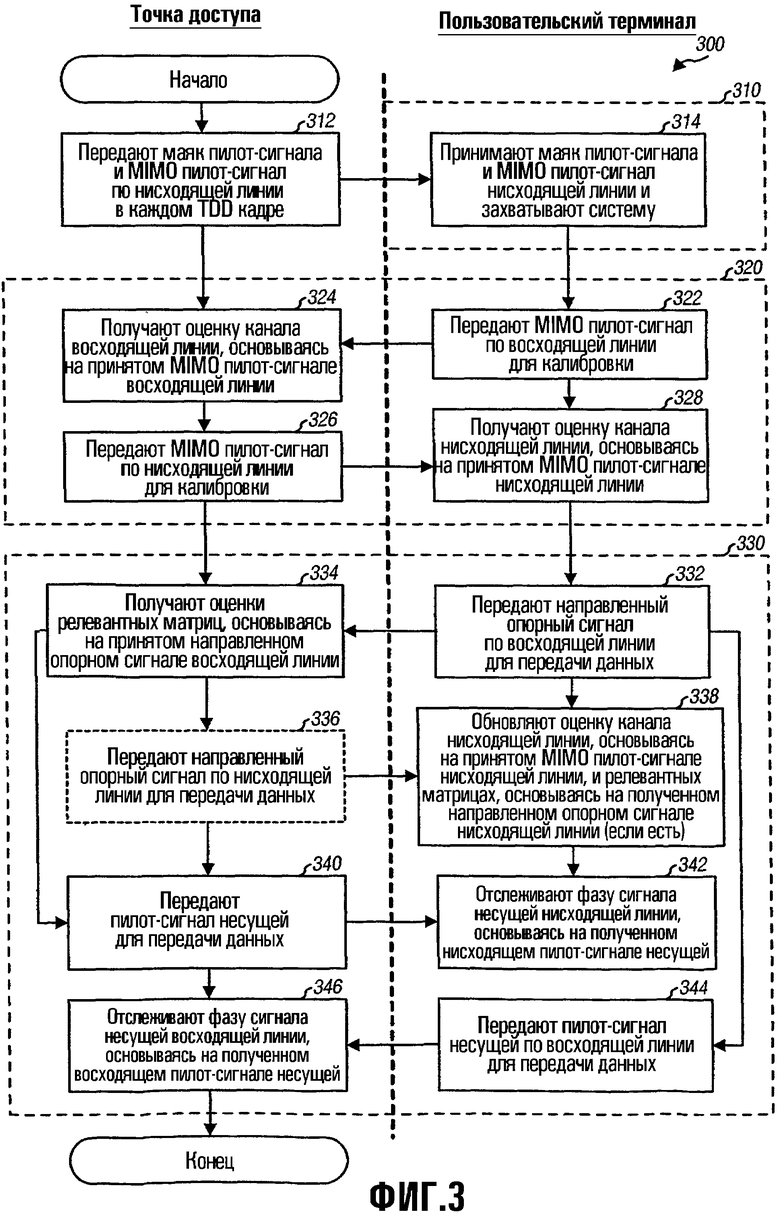
получают пилотный символ для каждой антенны из множества антенн; получают ортогональную последовательность для каждой антенны из множества антенн, причем множеству антенн назначают различные ортогональные последовательности; и
выполняют покрытие пилотного символа для каждой антенны ортогональной последовательностью для данной антенны для получения последовательности покрытых пилотных символов для данной антенны, причем множество последовательностей покрытых пилотных символов для множества ортогональных пилот-сигналов получают для указанного множества антенн;
причем набор пилотных символов получают для каждой антенны и он предназначен для передачи по набору поддиапазонов.
средство получения пилотного символа для каждой антенны из множества антенн;
средство получения ортогональной последовательности для каждой антенны из множества антенн, причем множеству антенн назначают различные ортогональные последовательности; и
средство выполнения покрытия пилотного символа для каждой антенны ортогональной последовательностью для данной антенны для получения последовательности покрытых пилотных символов для данной антенны, причем множество последовательностей покрытых пилотных символов для множества ортогональных пилот-сигналов получают для указанного множества антенн,
причем набор пилотных символов получают для каждой антенны и он предназначен для передачи по набору поддиапазонов.
получают набор пилотных символов для каждой антенны из множества антенн, причем набор пилотных символов реализован с возможностью передачи по набору поддиапазонов;
получают ортогональную последовательность для каждой антенны из множества антенн, причем множеству антенн назначены различные ортогональные последовательности; и выполняют покрытие набора пилотных символов для каждой антенны ортогональной последовательностью для данной антенны для получения набора последовательностей покрытых пилотных символов для данной антенны; и обрабатывают набор последовательностей покрытых пилотных символов для каждой антенны для получения последовательности OFDM символов для данной антенны, причем множество последовательностей OFDM символов для множества ортогональных пилот-сигналов получают для множества антенн.
получают первый набор последовательностей символов от набора приемных антенн, одна последовательность символов для каждой приемной антенны, причем первый набор последовательностей символов служит для MIMO пилот-сигнала, и при этом набор ортогональных пилот-сигналов для MIMO пилот-сигнала генерируют, основываясь на пилотном символе и наборе ортогональных последовательностей, назначенных набору передающих антенн, один ортогональный пилот-сигнал для каждой передающей антенны;
обрабатывают каждую последовательность символов в первом наборе с пилотным символом для получения соответствующей последовательности символов во втором наборе; и
снимают покрытие каждой последовательности символов при помощи набора ортогональных последовательностей для получения оценок отклика канала между набором передающих антенн и приемной антенной, связанной с последовательностью символов во втором наборе.
получают первый пилотный символ, предназначенный для передачи через множество антенн;
получают первый направляющий вектор для первого пространственного канала MIMO канала; и
обрабатывают первый пилотный символ с первым направляющим вектором для получения первой группы символов передачи, один символ передачи для каждой из множества антенн, причем первая группа символов передачи предназначена для направленного пилот-сигнала для первого пространственного канала.
получают второй пилотный символ, предназначенный для передачи через множество антенн;
получают второй направляющий вектор для второго пространственного канала MIMO канала; и
обрабатывают второй пилотный символ со вторым направляющим вектором для получения второй группы символов передачи для направленного пилот-сигнала для второго пространственного канала.
передают первую группу символов передачи через множество антенн в первом периоде символа; и
передают вторую группу символов передачи через множество антенн во втором периоде символа.
передают первую группу символов передачи через множество антенн в первом поддиапазоне; и
передают вторую группу символов передачи через множество антенн во втором поддиапазоне.
средство получения первого пилотного символа, предназначенного для передачи через множество антенн;
средство получения первого направляющего вектора для первого пространственного канала MIMO канала; и
средство обработки первого пилотного символа с первым направляющим вектором для получения первой группы символов передачи, один символ передачи для каждой из множества антенн, причем первая группа символов передачи предназначена для направленного пилот-сигнала для первого пространственного канала.
средство получения второго пилотного символа, предназначенного для передачи через множество антенн;
средство получения второго направляющего вектора для второго пространственного канала MIMO канала; и
средство обработки второго пилотного символа со вторым направляющим вектором для получения второй группы символов передачи для направленного пилот-сигнала для второго пространственного канала.
получают первый набор пилотных символов, предназначенный для передачи через множество антенн по первому набору поддиапазонов;
получают первый набор направляющих векторов для первого пространственного канала первого набора поддиапазонов; и
обрабатывают первый набор пилотных символов с первым набором направляющих векторов, для получения первого набора векторов символов, один вектор символов в первом наборе векторов символов для каждого поддиапазона в первом наборе поддиапазонов, причем каждый векторов символов в первом наборе векторов символов включает в себя множество символов передачи для множества антенн и соответствует направленному пилот-сигналу для первого пространственного канала поддиапазона, связанного с указанным векторов символов.
получают второй набор направляющих векторов для второго пространственного канала первого набора поддиапазонов; и
обрабатывают первый набор пилотных символов со вторым набором направляющих векторов, для получения второго набора векторов символов, причем каждый вектор символов во втором наборе векторов символов соответствует направленному пилот-сигналу для второго пространственного канала поддиапазона, связанного с указанным вектором символов.
передают первый набор векторов символов через множество антенн первого набора поддиапазонов в первом периоде символа; и
передают второй набор векторов символов через множество антенн первого набора поддиапазонов во втором периоде символа.
получают второй набор пилотных символов, предназначенный для передачи через множество антенн по второму набору поддиапазонов;
получают второй набор направляющих векторов для первого пространственного канала второго набора поддиапазонов; и
обрабатывают второй набор пилотных символов со вторым набором направляющих векторов, для получения второго набора векторов символов, один вектор символов во втором наборе векторов символов для каждого поддиапазона во втором наборе поддиапазонов, причем каждый из векторов символов во втором наборе векторов символов соответствует направленному пилот-сигналу для первого пространственного канала поддиапазона, связанного с указанным вектором символов.
передают первый набор векторов символов через множество антенн первого набора поддиапазонов; и
передают второй набор векторов символов через множество антенн второго набора поддиапазонов.
принимают первую группу символов от множества антенн для первого направленного пилот-сигнала через первый пространственный канал MIMO канала в MIMO системе, причем направленный пилот-сигнал генерируют, основываясь на пилотном символе и первом направляющем векторе для первого пространственного канала;
обрабатывают первую группу символов с указанным пилотным символом для получения второй группы символов;
определяют первый фактор масштабирования, основываясь на оценке мощности для символов в первой группе; и
выполняют масштабирование символов во второй группе на первый фактор масштабирования для получения второго направляющего вектора для первого пространственного канала.
принимают третью группу символов от множества антенн для второго направленного пилот-сигнала, принятого через второй пространственный канал MIMO канала, причем второй направленный пилот-сигнал генерируют, основываясь на указанном пилотном символе и первом направляющем векторе для второго пространственного канала;
обрабатывают третью группу символов с указанным пилотным символом для получения четвертой группы символов;
определяют второй фактор масштабирования, основываясь на оценке мощности для символов в третьей группе; и
выполняют масштабирование символов в четвертой группе на второй фактор масштабирования для получения второго направляющего вектора для второго пространственного канала.
генерируют множество ортогональных пилот-сигналов для MIMO пилот-сигнала, основываясь на первом пилотном символе и множестве ортогональных последовательностей для множества антенн, причем множество ортогональных пилотных сигналов предназначено для передачи через множество антенн по первой линии; и
обрабатывают направленный пилот-сигнал, принятый от второго объекта через пространственный канал по второй линии, причем направленный пилот-сигнал генерируют, основываясь на втором пилотном символе и направляющем векторе для указанного пространственного канала, и при этом направляющий вектор получают, основываясь на MIMO пилот-сигнале.
получают множество ортогональных последовательностей для множества антенн, причем множеству антенн назначены различные ортогональные последовательности, и
выполняют покрытие первого пилотного символа каждой из множества ортогональных последовательностей для получения соответствующего одного из множества ортогональных пилот-сигналов.
генерирую пилот-сигнал маяка, основываясь на первом пилотном символе, причем пилот-сигнал маяка содержит общий пилот-сигнал, подходящий для передачи через каждую из множества антенн по восходящей линии в MIMO системе;
генерируют множество ортогональных пилот-сигналов для MIMO пилот-сигнала, основываясь на втором пилотном символе и множестве ортогональных последовательностей для множества антенн, причем множество ортогональных пилотных сигналов предназначено для передачи через множество антенн по нисходящей линии; и
обрабатывают направленный пилот-сигнал, принятый от второго объекта через пространственный канал по восходящей линии в MIMO системе, причем направленный пилот-сигнал генерируют, основываясь на третьем пилотном символе и направляющем векторе для указанного пространственного канала, и при этом направляющий вектор получают, основываясь на MIMO пилот-сигнале.
оценивают отклик канала первой линии в MIMO системе;
получают набор направляющих векторов для второй линии в MIMO системе, основываясь на оценке отклика канала для первой линии; и
генерируют направленный пилот-сигнал для пространственного канала второй линии, основываясь на направляющем векторе из набора направляющих векторов.
передают направленный пилот-сигнал по второй линии.
принимают MIMO пилот-сигнал по первой линии, причем MIMO пилот-сигнал содержит множество ортогональных пилот сигналов, сгенерированных, основываясь на множестве ортогональных последовательностей, и переданных по первой линии через множество антенн, при этом отклик канала первой линии оценивают, основываясь на принятом MIMO пилот-сигнале.
передающий пространственный процессор, выполненный с возможностью генерации множества ортогональных пилот-сигналов для MIMO пилот-сигнала, основываясь на первом пилотном символе и множестве ортогональных последовательностей для множества антенн, причем множество ортогональных пилот-сигналов предназначено для передачи через множество антенн по нисходящей линии в MIMO системе; и
приемный пространственный процессор, выполненный с возможностью обработки направленного пилот-сигнала, принятого от терминала через пространственный канал по восходящей линии в MIMO системе, причем направленный пилот-сигнал генерируют в терминале, основываясь на втором пилотном символе и направляющем векторе для указанного пространственного канала, при этом направляющий вектор получают в терминале, основываясь на MIMO пилот-сигнале, принятом по нисходящей линии.
приемный пространственный процессор, выполненный с возможностью обработки MIMO пилот-сигнала, принятого от точки доступа по нисходящей линии в MIMO системе, для получения оценок отклика канала для нисходящей линии, причем MIMO пилот-сигнал содержит множество ортогональных пилот-сигналов, сгенерированных, основываясь на пилотном символе и множестве ортогональных последовательностей, назначенных множеству антенн в точке доступа, один ортогональный пилот-сигнал для каждой из множества антенн; и
передающий пространственный процессор, выполненный с возможностью генерации направленного пилот-сигнала, основываясь на втором пилотном символе и направляющем векторе для пространственного канала восходящей линии в MIMO системе.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЛИНИЯ РАДИОСВЯЗИ С ПРОСТРАНСТВЕННОЙ МОДУЛЯЦИЕЙ | 1999 |
|
RU2152132C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Устройство для контроля профиля сечений | 1982 |
|
SU1185048A1 |

