Изобретение относится к системам сканирования и сравнения изображения, в частности к системам дистанционного мониторинга чрезвычайных ситуаций, в частности к системам, осуществляющим постоянный наземный мониторинг лесных массивов и населенных пунктов в местах, где развернута система сотовой связи.
Известны различные системы мониторинга пожарной обстановки: CN 101833838, KR 100981428, CN 101751755, WO 201001574, WO 9735433, FR 2893743, FR 2811456, DE 3710265, KR 20100136737, CN 101567123, KR 20090011068.
В заявке CN 101673448 описана система обнаружения лесного пожара, которая содержит контрольный пункт со сверхпрочной платформой, тепловым инфракрасным блоком формирования изображений, видеокамерой, микрометеорологической станцией, а также с видеотехнологическим оборудованием, обеспечивающим коммуникацию, и центром управления, который включает компьютер и средства связи, причем, две линии связи используют беспроводную сеть TCP/IP. Работа по обнаружению возгорания выполняется в соответствии со следующими этапами: получение и накопление данных на местах, обработка полученных видеоизображений, обнаружение возгорания и проведение анализа данных, передача результатов анализа, оценка вероятности возгорания и передача сведений об обнаружении возгорания. Система использует комбинацию видео- и теплового инфракрасного изображений для анализа изображения, радиосвязь, дистанционное зондирование и трехмерную географическую информационную систему, чтобы автоматически получать сведения о наличии и распространении пожара.
В патенте США US 5557260, 1996, описана система контроля и обнаружения источников тепла на открытых пространствах, которая включает автономные средства инфракрасного видения и дневного видения, которые связаны с центральной станцией контроля, где изображения обрабатываются в режиме реального времени для автоматического обнаружения источников тепла.
В патенте США US 5734335 описана система мониторинга для раннего обнаружения и сообщения о лесных пожарах в лесной области. Система включает множество удаленных датчиков, помещенных в лесу и телеметрически связанных с центральной системой обработки сигнала. Каждый удаленный датчик включает инфракрасный датчик и видеокамеру, установленную на управляемой движущейся платформе. Удаленный датчик также содержит датчик метеоусловий для того, чтобы собирать данные о погоде в местах установки датчиков. В каждом месте установки датчиков имеется собственный процессор, который управляет всем сбором данных и находится в коммуникации с центральным диспетчерским пунктом через коммуникационную подсистему по радиоканалу. Центральный диспетчерский пункт получает данные о погоде и видеоизображение от удаленного датчика через систему связи. Центральный диспетчерский пункт содержит видеоконтрольное оборудование для визуального осмотра области, находящейся под наблюдением, и центральный процессор для полного системного контроля. Центральный процессор получает данные от множества удаленных датчиков и обеспечивает подачу сигнала тревоги на переведенных в цифровую форму топографических картах леса, а также моделирует прогноз ожидаемого роста фронта огня, основанного на полученных данных и информации, хранившейся в архивной базе данных. Распечатанный экземпляр топографических карт, показывающий место нахождения источника огня и путь его распространения, может быть получен от центрального процессора для использования противопожарным персоналом.
Известна тепловизионная система, позволяющая модулировать потоки различного спектрального состава, регистрируя разностные синхронно-демодулированные сигналы, получая при этом изображения повышенного качества с дополнительным информационным содержанием. Данная система обеспечивает возможность совмещения в одном приборе функций тепловизора и дальномера при одновременном повышении контраста изображения, что позволяет определять наличие и координаты "точечных" объектов /тлеющих костров/ в лесных массивах с воздуха в целях профилактики лесных пожаров (заявка на выдачу патента РФ на изобретение 94037444, опубл. 20.07.1996).
Известна система круглосуточного обнаружения и мониторинга развития очагов пожаров в регионе (патент RU 2276808, опубл. 20.05.2006 г.), содержащая датчик наблюдения пожарной обстановки, расположенный на мачте, систему визуального отображения пожарной обстановки, хранения информации и управления датчиком наблюдения, связанную с датчиком наблюдения через канал связи, при этом датчик наблюдения включает оптическую камеру панорамного наблюдения, интерфейс передачи информации и блок питания камеры и интерфейса, оптическая камера содержит последовательно установленные и оптически связанные между собой плоское сканирующее зеркало, объектив, поворотное зеркало, приемник ИК-излучения и аналого-цифровой преобразователь, при этом сканирующее зеркало соединено с двигателем вращения двумя независимыми кинематическими связями, первая из которых обеспечивает одностороннее круговое движение сканирующего зеркала в азимутальной плоскости, вторая - качание сканирующего зеркала в пределах угла от 0 до 45° к азимутальной плоскости, в качестве объектива камеры использовано сферическое зеркало, а приемник ИК-излучения имеет один чувствительный элемент, также камера содержит два оптоэлектронных датчика углового положения сканирующего зеркала, оптически связанных с выходными элементами кинематических связей и формирующих в аналого-цифровом преобразователе датчика наблюдения импульсы строчной и кадровой развертки, первый - при нахождении сканирующего зеркала в азимутальной плоскости, второй - при нахождении зеркала в одном из крайних положений при отклонении на 45° к азимутальной плоскости. Система может содержать, по крайней мере, два аналогичных датчика наблюдения, каждый из которых установлен на соответствующей мачте и связан через канал связи с системой визуального отображения пожарной обстановки, хранения информации и управления датчиками наблюдения. Кроме того, в состав оптической камеры после сканирующего зеркала включена вторая оптическая система отображения пожарной обстановки, состоящая из последовательно установленных и оптически связанных поворотного зеркала, объектива и одноэлементного приемника излучения, чувствительность которого находится в видимом диапазоне спектра, при этом вторая оптическая система оптически связана со сканирующим зеркалом, причем оптические оси первой и второй оптических систем отображения параллельны. Система визуального отображения пожарной обстановки, хранения информации и управления датчиком наблюдения автоматически обнаруживает очаги пожара и по данным датчиков углового положения сканирующего зеркала их координаты в зоне обзора датчика наблюдения, причем путем сравнения полученной информации с первого и второго ИК-приемников излучения исключает возможность ложного срабатывания устройства из-за температурной неоднородности в зоне мониторинга, а на основе информации с приемника видимого диапазона спектра в дневное время суток автоматически обнаруживает дымовые шлейфы от очага пожара, а также путем сравнения полученной информации от первого и второго приемников излучения исключает возможность ложного срабатывания устройства при попадании в устройство прямого и отраженного солнечного излучения.
Ближайшим аналогом изобретения является система мониторинга пожарной обстановки с помощью наблюдения в видео- и тепловом каналах аппаратурой, расположенной на гироплатформе, помещенной на привязной аэростат с передачей двух слоев изображения на наземное вычислительное устройство, которое передает видеоизображение с наложенным тепловым слоем на монитор, одновременно автоматически выделяя дымовые шлейфы на видеослое и тепловые аномалии на тепловом слое с передачей их азимутальных координат, полученных с помощью гирокомпаса, расположенного на аэростате, на цифровой индикатор и запоминающее устройство. Мониторинг ведут с помощью шести видеокамер и соосных с ними сканеров типа МСУ, расположенных на гиростабилизированной платформе, размещенной на привязном аэростате, последовательно переключая камеры коммутатором и передавая полученные в видео- и тепловом каналах изображения совместно с данными азимутального направления осей камер, полученными с помощью гирокомпаса, на наземное вычислительное устройство (патент RU 2395319, опубл. 27.01.2010).
К недостаткам данной системы мониторинга относится то, что в данном устройстве отсутствует системность, оно предназначено для ведения локального наблюдения, при этом вследствие использования аэростата, время использования ограничено (от 10 до 25 дней). Другим недостатком данной системы является ограничение по разрешению видеокамеры и тепловизионного изображения из-за широкого угла обзора (более 60°), ограниченный сектор обзора камеры, при этом камеры расположены соосно со сканерами типа МСУ, что дополнительно ограничивает объем получаемой информации. В аналоге используется шесть неподвижно установленных камер, и сканирование осуществляется путем электронного коммутатора, вследствие чего отсутствует возможность получать, обрабатывать или работать с потоковым видео в реальном масштабе времени из-за наличия электронного коммутатора, который переключает камеры. Кроме того, работоспособность устройства зависит от погодных условий (скорости ветра на рабочей высоте).
Заявленное изобретение направлено на устранение недостатков ближайшего аналога и решает следующие задачи:
- сократить бюджетные средства, выделяемые на раннее выявление лесных пожаров, т.е. с максимальным эффектом реализовать федеральную программу по предотвращению лесных пожаров;
- устранить зависимость возможности раннего обнаружения лесных пожаров от наличия летной погоды или от отсутствия сплошной облачности над контролируемой территорией;
- снизить угрозы возникновения, неконтролируемого расширения и наступления лесных пожаров на населенные пункты и стратегические объекты за счет обнаружения очага возгорания малой площади;
- оптимизировать взаимодействие между органами местного самоуправления, подразделениями МЧС и другими реагирующими службами;
- повысить эффективность информационного взаимодействия заинтересованных служб для сокращения времени реагирования на чрезвычайные ситуации, повышения готовности к локализации и устранению последствий лесных пожаров на контролируемой территории;
- повысить уровень безопасности граждан за счет своевременного получения информации и оповещения об очагах возгорания в районе;
- обеспечить возможность восстановления хода событий на основе анализа архивов информации.
Поставленные задачи решаются за счет того, что мониторинг лесных пожаров ведут, по меньшей мере, с двух точек, каждая из которых расположена на мачте сотовой связи, посредством тепловизионной камеры и видеокамеры, установленных так, что их оси параллельны, и закрепленных на сканирующей платформе, размещенной на каждой мачте сотовой связи и имеющей возможность вращения относительно вертикальной оси и поворота относительно горизонтальной оси, при этом передают изображения, полученные в видео- и тепловом каналах, совместно с данными углового и азимутального направления осей камер, полученными с помощью угломерно-азимутного измерителя, на центральный сервер, в котором преобразуют данные, полученные от тепловизионных камер, видеокамер и угломерно-азимутных измерителей, расположенных на соседних мачтах сотовой связи, в систему географических координат, осуществляют привязку очагов возгорания к географическим координатам с отображением на электронной карте местности, накладывают видеоизображение на изображение от тепловизионной камеры и выводят полученные изображения в виде трех отдельных изображений, первое из которых - разносенсорное панорамное изображение - получено наложением видеоизображения на изображение от тепловизионной камеры, второе - тепловизионное изображение и третье - видеоизображение, на монитор оператора и/или на запоминающее устройство, причем фазовую синхронизацию сигнала для передачи информации на центральный сервер и дополнительную привязку к географическим координатам осуществляют по спутниковым сигналам точного времени посредством глобальной навигационной спутниковой системы.
Реализующая способ комплексная система раннего обнаружения лесных пожаров содержит, по меньшей мере, два тепловизионно-телевизионных модуля кругового сканирования местности, расположенных на соседних мачтах сотовой связи, каждый тепловизионно-телевизионный модуль содержит тепловизионную камеру и видеокамеру, установленные так, что их оси параллельны, угломерно-азимутный измеритель, ось которого параллельна осям тепловизионной камеры и видеокамеры, и контроллер управления, при этом тепловизионная камера, видеокамера и угломерно-азимутный измеритель закреплены на сканирующей платформе, установленной на мачте сотовой связи и имеющей возможность вращения относительно вертикальной оси и поворота относительно горизонтальной оси, причем выходы тепловизионной камеры, видеокамеры и угломерно-азимутного измерителя связаны с первым-третьим входами контроллера управления, вход устройства управления движением сканирующей платформы связан с первым выходом контроллера управления, четвертый вход контроллера управления связан с блоком глобальной навигационной спутниковой системы, при этом комплексная система обнаружения лесных пожаров снабжена телекоммуникационным модулем, связанным входом-выходом с пятым входом и вторым выходом контроллера управления и осуществляющим беспроводную связь для передачи данных с контроллера управления с центральным сервером.
Кроме того, система снабжена устройством сбора метеоданных, выход которого связан с шестым входом контроллера управления.
Техническим результатом от использования изобретения является повышение достоверности и точности обнаружения лесных пожаров, в частности малых очагов возгорания, при упрощении устройства, снижение вероятности ложных обнаружений очагов возгорания.
Указанный технический результат достигается за счет объединения в единую сеть нескольких блоков, позволяющих осуществлять постоянный контроль больших территорий с автоматизированным выявлением малоплощадных очагов возгорания и определением их координат, передачу этой информации вместе с тепловизионной и видеокартинкой оператору, а также использование глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС, позволяющей синхронизировать работу заявленной системы по сигналам точного времени. Использование в системе как минимум двух, а при необходимости достаточно большого количества устройств разносенсорного (тепло- и видео-) панорамного обзора, монтируемых на мачтах сотовой связи, позволяет повысить достоверность обнаружения очагов возгорания благодаря тому, что источник огня обнаруживают два и более устройства. Одновременное получение сигнала от двух и более тепловизионно-телевизионных модулей кругового сканирования местности, включающих тепловизионные и видеокамеры, установленные рядом так, что их оси параллельны, обусловливает снижение вероятности ложных обнаружений очагов возгорания и повышение надежности и достоверности получаемой информации вследствие того, что тепловизионные и видеокамеры панорамного обзора установлены на мачтах антенн базовых станций сотовой связи, и наблюдение за каждой точкой территории ведется с нескольких (2-х и более) соседних вышек, т.е. каждая точка контролируемого участка леса (или другого объекта наблюдения) просматривается под разными углами, что снижает вероятность того, что очаг возгорания будет не замечен. Очаг возгорания, закрытый от одной из точек наблюдения рельефом местности или другой помехой, будет виден с другой точки (вышки сотовой связи).
Так как в силу своего целевого назначения мачты антенн базовых станций расположены на господствующих высотах и имеют высоту от 50 до 100 метров, размещенные на них тепловизионные и видеокамеры с круговым обзором позволят обеспечить обнаружение очагов возгорания на дальности до 18-50 км.
Поскольку координаты базовых станций известны, размещение тепловизионных и видеокамер на высотных сооружениях базовых станций операторов сотовой связи и применение совместной обработки данных от тепловизионных и видеокамер, расположенных на 2-х-3-х соседних мачтах на площадях покрытия сотовой связью, позволяет с использованием метода триангуляции определить место расположения очага возгорания с точностью до 20-50 метров. Очаг возгорания с площадью до 50 кв. метров может быть обнаружен на дальностях до 35 км. Все это позволяет обеспечить быстрое реагирование на пожары и, как следствие, безопасность жителей, мест их проживания, сохранность природных ресурсов.
Поскольку базовые станции имеют радиорелейные или кабельные широкополосные каналы связи (с большим запасом по пропускной способности), которые, собственно, и объединяют их в единую сеть, то в случае установки на них противопожарной системы имеется возможность упростить заявленную систему за счет использования этой уже существующей телекоммуникационной инфраструктуры.
Дополнительным техническим результатом является прогнозирование вероятности возникновения пожаров и возможного распространения их методом Нестерова на основании метеоданных, полученных от оборудования в рамках одного устройства.
Техническое решение позволяет осуществлять раннее выявление очагов возгорания, возникающих в лесных массивах на значительном (до 50 км) удалении от населенных пунктов и важных стратегических объектов, что позволяет своевременно принять адекватные противопожарные меры, не допуская последующего приближения огня к местам жизнедеятельности людей.
Изобретение поясняется чертежами, на которых изображено:
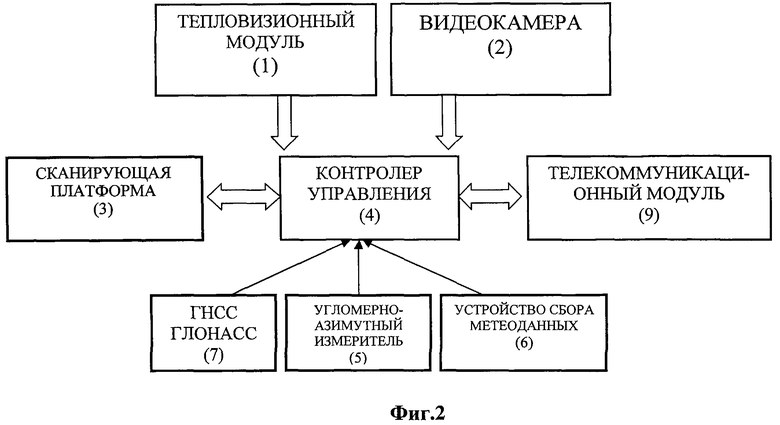
на фиг.1 - общий вид размещения системы на мачтах базовых станций сотовой связи;
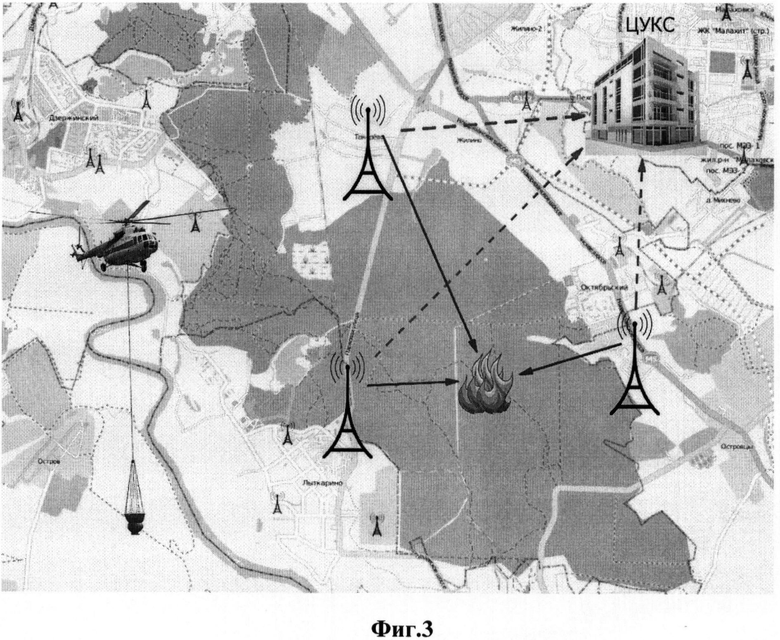
на фиг.2 - структурная схема тепловизионно-телевизионного модуля кругового сканирования местности, размещаемого на мачте антенны сотовой системы связи;
на фиг.3 - отображение обнаруженного очага возгорания на карте местности.
Способ мониторинга лесных пожаров осуществляют следующим образом. На двух, трех (или более) мачтах сотовой связи устанавливают тепловизионно-телевизионный модуль кругового сканирования местности (ТТМКСМ). Каждый тепловизионно-телевизионный модуль содержит тепловизионную камеру 1 и видеокамеру 2, установленные на сканирующей платформе 3 так, что их оптические оси параллельны. В состав тепловизионно-телевизионного модуля входит также контроллер управления 4 и угломерно-азимутный измеритель 5, определяющий ориентацию сканирующей платформы и, соответственно, расположение тепловизионной камеры и видеокамеры по азимуту и по углу отклонения от горизонтальной плоскости.
Режим разносенсорного панорамного обзора заключается в наложении панорамного видеоизображения на изображение от тепловизионной камеры, что позволяет осуществить визуальную привязку очага возгорания к панорамному видеоизображению.
Сканирующая платформа 3 размещена на мачте сотовой связи и имеет возможность вращаться относительно вертикальной оси и поворачиваться относительно горизонтальной оси. Движением сканирующей платформы 3 управляет устройство управления сканирующей платформы, получающее команды от центрального сервера через контроллер управления. Изображения, полученные в тепло- и видео каналах, совместно с данными углового и азимутального направления осей камер, полученными с помощью угломерно-азимутного измерителя, передают на центральный сервер 8 через контроллер управления 4 и телекоммуникационный модуль (модем) 7. В центральном сервере 8 преобразуют данные, полученные от тепловизионных камер 1, видеокамер 2 и угломерно-азимутных измерителей 5, расположенных на соседних мачтах сотовой связи, в систему географических координат, осуществляют привязку очагов возгорания к географическим координатам с отображением на электронной карте местности, накладывают видеоизображение на тепловизионное изображение и выводят полученные изображения в виде трех отдельных изображений:
- полученного наложением разносенсорного панорамного изображения,
- тепловизионного изображения,
- видеоизображения,
на монитор оператора и/или на запоминающее устройство, причем фазовую синхронизацию сигнала для передачи информации на центральный сервер и дополнительную привязку к географическим координатам осуществляют по спутниковым сигналам точного времени посредством глобальной навигационной спутниковой системы, преимущественно, ГЛОНАСС.
Комплексная система раннего обнаружения пожаров, построенная на принципе разносенсорного панорамного обзора местности с функцией высокоточного определения очага возгорания, предназначена для осуществления описанного выше способа, т.е. для выявления очагов возгорания, вычисления их географических координат и отображения этой информации на мониторе оператора в автоматизированном режиме. Система построена на принципе разносенсорного (тепловизионного и видео-) панорамного обзора местности с функцией высокоточного определения очага возгорания.
Система раннего обнаружения пожаров состоит из следующих функциональных подсистем:
- подсистема выявления очагов возгорания;
- подсистема передачи данных;
- подсистемы интеллектуальной обработки и картографии.
Подсистема выявления очагов возгорания располагается на мачтах базовых станций сотовой связи (см. фиг.1). Основу подсистемы выявления очагов возгорания составляет тепловизионно-телевизионный модуль кругового сканирования местности - ТТМКСМ.
ТТМКСМ размещают на соседних мачтах сотовой связи для осуществления кругового обзора местности в видео- и тепловизионном режиме.
ТТМКСМ включает тепловизионную камеру 1 и видеокамеру 2 типа «день-ночь». Предпочтительно для заявленной системы использовать специальную тепловизионную камеру, разработанную компанией ЗАО «Видеофон MB» (см. журнал «Точка опоры», №08 (133), апрель 2011 г., с.27).
Тепловизионная камера 1 и видеокамера 2, оптические оси которых расположены параллельно друг другу, закреплены рядом друг с другом на сканирующей платформе 3. Вследствие такого расположения камер 1 и 2 система позволяет осуществлять разносенсорный панорамный обзор местности.
Тепловизионная камера 1 предназначена для формирования тепловизионного изображения участка местности с возможностью выделения площадных высокотемпературных объектов.
Видеокамера 2, установленная параллельно тепловизионной камере 1, предназначена для формирования видеоизображения участка местности, с которого получено тепловизионное изображение.
Тепловизионную камеру 1 и видеокамеру 2 располагают на сканирующей платформе 3 на мачте сотовой связи. Сканирующая платформа 3, на которой установлены тепловизионная камера 1 и видеокамера 2, представляет собой самостоятельное устройство, позволяющее осуществлять движение совместно с камерами 1 и 2 в горизонтальной плоскости от 0 до 360 градусов и по углу места в 45 градусов. Движением сканирующей платформы управляет устройство управления сканирующей платформой, связанное через контроллер 4 с центральным сервером 8.
На сканирующей платформе 3 установлен входящий в состав ТТМКСМ угломерно-азимутный измеритель 5, ось которого параллельна осям камер 1 и 2.
Контроллер управления 4, входящий в состав ТТМКСМ, располагается также на мачте сотовой связи и предназначен для синхронизации работы всей системы, сбора и обработки данных. На первый-третий входы контроллера 4 поступают сигналы от тепловизионной камеры 1, видеокамеры 2, угломерно-азимутного измерителя 5, на четвертый вход - сигнал системы ГЛОНАСС, на шестой вход - сигнал с устройства сбора метеорологических данных 6. С первого выхода контроллера 4 сигнал, содержащий данные, полученные от видеокамеры, тепловизионной камеры, угломерно-азимутного измерителя, системы ГЛОНАСС и устройства сбора метеорологических данных, передается через телекоммуникационный модуль 9 (модем) на центральный сервер 8. Второй выход контроллера управления связан с входом устройства управления положением сканирующей платформы, осуществляющим управление по сигналу, поступающему от центрального сервера через телекоммуникационный модуль 9 (модем) на пятый вход контроллера управления.
Угломерно-азимутный измеритель 5 определяет азимутальный угол положения тепловизионной камеры 1 и видеокамеры 2, расположенных на сканирующей платформе, и угол отклонения их оптических осей от горизонтали. Эти данные о текущем положении камер 1 и 2 передаются на контроллер управления 4 и далее на центральный сервер 8, что позволяет серверу 8 вычислять угол между направлением на север и направлением на очаг возгорания, а также дальность до очага возгорания на основании данных о высоте установки ТТМКСМ и угле наклона камеры.
На мачте сотовой связи также установлено устройство сбора метеоданных 6, которое предназначено для получения данных о текущей температуре, температуре точки росы, количестве выпавших осадков и направлении и скорости ветра. Эти данные также передаются на контроллер управления 4. На основании этих данных в дальнейшем прогнозируется пожароопасность (возможность распространения огня, скорость распространения и направление).
Сигнал с блока глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС 7, поступающий на четвертый вход контроллера 4, позволяет осуществлять привязку работы системы раннего обнаружения пожаров к географическим координатам, а также служит для синхронизации каждого устройства в единой системе по спутниковым сигналам точного времени и фазовой синхронизации сигнала для передачи информации на центральный сервер 8.
Тепловизионная камера 1 и видеокамера 2 предназначены для работы в температурном режиме от - 40°С до +50°С, что позволяет использовать их непрерывно в течение года.
Дальность обнаружения очага возгорания подсистемой выявления очагов возгорания, расположенной на мачтах сотовой связи, составляет 35 км и более.
За счет того что базовым сигналом для обнаружения очага возгорания является сигнал с тепловизионной камеры 1, на результаты работы и чувствительность подсистемы выявления очагов возгорания не влияет время суток и года, наличие облачности, тумана и других помех визуальной видимости.
ТТМКСМ может быть оснащен рядом дополнительных устройств, позволяющих снизить вероятность ложных срабатываний, учесть климатические условия и повысить точность определения координат очага.
Подсистема передачи данных предназначена для передачи данных, полученных от контроллера 4, на центральный сервер 8 для обработки результатов.
Первый выход контроллера 4 соединен с телекоммуникационным модулем (модемом) 9, который предназначен для передачи тепловизионного и видеоизображения, данных от метеостанции, данных о координатах очагов пожара и приема исполнительных команд для устройства управления сканирующей платформой от центрального сервера 8.
Центральный сервер 8 обрабатывает полученную от устройств информацию, осуществляет привязку очагов возгорания к географическим координатам с отображением на электронной карте местности, выводит разносенсорное панорамное изображение на монитор оператора вместе с тепловизионным и видеоизображением.
В состав заявленной комплексной системы входит подсистема интеллектуальной обработки и картографии. Поскольку тепловизионная система обнаружения пожаров способна выявлять любые объекты, имеющие повышенную относительно окружающего фона температуру, в том числе Солнце, движущийся воздушный или наземный транспорт, пролетающих птиц и т.п., то с целью снижения вероятности ложной тревоги используют блок интеллектуальной обработки полученного теплоизображения с целью выявления трендов быстродвижущихся целей с тепловым контрастом, сопоставления трендов с зоной обзора и исключения формирования сигналов тревоги для целей, движущихся в воздушном пространстве или по известным траекториям и дорогам.
Автоматизированная подсистема картографии (аналогичная системе аналога по патенту US 5734335) предназначена для преобразования данных, наблюдаемых тепловизионными камерами, расположенными на мачтах антенн соседних базовых станций, в систему географических координат (приведение результатов контроля к плану местности), определения координат возгорания и отображения данной информации на карте (плане). Результат подобного преобразования схематично показан на фиг.3.
Результаты в дальнейшем могут быть переданы службам реагирования МЧС России и Рослесхоза с целью своевременного принятия решений. Возможна также передача информации с указанием координат очагов пожаров на авиационные средства охраны лесов и пожаротушения.
В предлагаемом решении в центральном сервере 8 производится наложение двух изображений - на изображение от тепловизионного модуля накладывается изображение, полученное от видеокамеры. За базовый сигнал для оценки события принимается тепловизионное изображение как наиболее информативное для решения задач раннего обнаружения очагов возгорания. Сигнал видеокамеры позволяет получить более информативную и понятную оператору картинку места происшествия.
На монитор автоматизированного рабочего места (АРМ) выводятся три картинки - совмещенное изображение, тепловизионное изображение и видеоизображение, что позволяет системе и оператору своевременно принять правильное решение.
Использование данного метода позволяет сохранить высокую работоспособность системы в условиях плохой видимости, таких как дымка, туман, дождь, ночное время, засветка камеры солнцем.
Система в автоматическом режиме осуществляет сканирование местности по горизонту в 360 градусов и до 45 градусов по углу места и в автоматическом режиме выявляет теплоконтрастные объекты с запоминанием их координат и выдает сигнал тревоги. В случае обнаружения статических высокотемпературных объектов (крыши домов, трубы котельных и т.п.) или быстро перемещающихся объектов (автотранспорт) система при последующем сканировании или команде оператора не выдает сигнал тревоги, если температурные параметры объекта не изменяются (аналогично CN 101315667).
Вся информация от устройств наблюдения передается по каналам передачи данных на единый центральный сервер, где осуществляется обработка информации и наложение ее на карту местности с указанием координат расположения устройств слежения и точных координат очага возгорания. На карте также отображается прогнозируемая пожароопасность в данной местности с указанием направления и силы ветра. В последующем данная информация поступает на АРМ операторов.
Сканирование местности посредством тепловизионно-телевизионного модуля кругового сканирования осуществляется следующим образом.
Азимутальная плоскость разбивается на несколько секторов исходя из особенностей и рельефа местности. Горизонтальная плоскость разбита на сектора таким образом, чтобы при перемещении камеры от точки к точке получалась единая панорамная картинка. После прохождения одного азимутального сектора камеры 1 и 2 переходят на следующий, сканируя таким образом выделенную территорию.
При ориентации тепловизионно-телевизионного модуля кругового сканирования местности в контрольную (реперную) точку осуществляется съемка местности тепловизионной и видеокамерами, в автоматизированном режиме вычисляется наличие (отсутствие) очагов возгорания. После этого сканирующая платформа поворачивает камеры 1 и 2 в следующую точку. Все изображения хранятся в памяти центрального сервера, и возможен быстрый переход в необходимую реперную точку.
При обнаружении в автоматизированном режиме очага возгорания система останавливает автоматическое сканирование, определяет координаты источника возгорания и пересылает видео- и тепловизионное изображение в реальном масштабе времени, а также координаты очага возгорания оператору.
Оператор для правильного принятия решения может в ручном режиме зуммировать изображение от видеокамеры и посмотреть отдельно тепловизионную картинку. Все эти данные необходимы для принятия решения оператором о дальнейшем реагировании на очаг возгорания.
На основании данных, получаемых от метеостанции, производят расчет коэффициента Нестерова и по запросу оператора подсвечивают электронную карту в различные цвета исходя из значений коэффициента Нестерова. При этом благодаря большому количеству метеостанций на единицу площади оператор получает более точную картину пожароопасной обстановки и вероятности направления распространения пожаров.
Для повышения сенсомоторной и психофизиологической совместимости среды «человек-машина» программно-аппаратного комплекса системы раннего обнаружения пожаров на каждом рабочем месте оператора должны быть доступны для обзора мониторы 3-х АРМов, которые служат для отображения специализированной геоинформационной системы, ситуационных изображений от тепловизионных и видеокамер с места события в случае обнаружения признаков пожара и детального анализа обстановки в месте события с использованием управляемых камер с целью выработки решения о дальнейших действиях.
Предлагаемая система осуществляет пространственно-временной анализ предыдущих и текущих изображений с использованием метода медианной фильтрации (с целью снижения вероятности ложных помех, вызванных бликами и движущимися объектами), что позволяет ей в автоматизированном режиме с высокой долей вероятности обнаруживать очаги возгорания на ранней стадии и выводить на монитор оператора картинку потенциально опасного участка. Применение автоматизации данного процесса позволяет сократить число операторов и повысить вероятность обнаружения очагов возгорания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2017 |
|
RU2663246C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2019 |
|
RU2703362C1 |
| Пожарный извещатель для наведения пожарного робота | 2016 |
|
RU2625715C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕСНОГО ПОЖАРА | 2014 |
|
RU2556536C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЛЕСНОГО ПОЖАРА | 2012 |
|
RU2492891C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО ПРОГНОЗИРОВАНИЯ ВЕРОЯТНОСТИ ВОЗНИКНОВЕНИЯ ПРИРОДНЫХ ПОЖАРОВ | 2023 |
|
RU2832688C1 |
| СИСТЕМА МОНИТОРИНГА ЛЕСНЫХ МАССИВОВ | 2013 |
|
RU2574898C2 |
| ЭНЕРГЕТИЧЕСКИ АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВОЗГОРАНИЙ | 2018 |
|
RU2689633C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| ЭНЕРГЕТИЧЕСКИ АВТОНОМНОЕ РЕАКТИВНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВОЗГОРАНИЙ | 2024 |
|
RU2831038C1 |
Изобретение может быть использовано для повышения достоверности и точности обнаружения лесных пожаров. Техническим результатом является расширение функциональных возможностей за счет увеличения ограничений по разрешению видеокамеры и тепловизорного изображения, увеличение угла обзора и объема получаемой информации. Мониторинг местности ведут, по меньшей мере, с двух точек, расположенных на мачтах сотовой связи, посредством тепловизионной камеры и видеокамеры, установленных так, что их оси параллельны, и закрепленных на сканирующей платформе, размещенной на каждой мачте сотовой связи, при этом передают изображения, полученные в тепловом и видеоканалах, совместно с данными углового и азимутального направления осей камер, на центральный сервер, в котором преобразуют изображения, полученные от тепловизионных и видеокамер, и данные от угломерно-азимутных измерителей, расположенных на мачтах сотовой связи, в систему географических координат, осуществляют привязку очагов возгорания к географическим координатам с отображением на электронной карте местности, накладывают видеоизображение на изображение от тепловизионной камеры и выводят полученные изображения в виде трех отдельных изображений на монитор оператора и/или на запоминающее устройство. 2 н. и 1 з.п. ф-лы, 3 ил.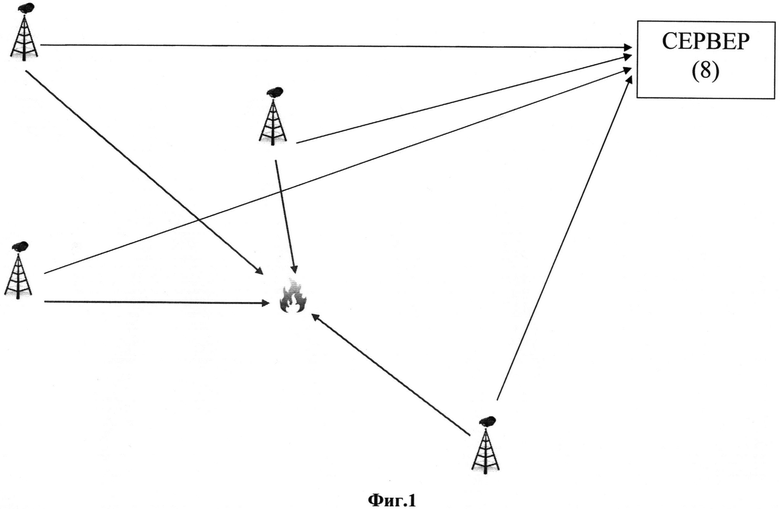
1. Способ мониторинга лесных пожаров, характеризующийся тем, что мониторинг ведут, по меньшей мере, с двух точек, расположенных на мачтах сотовой связи посредством тепловизионной камеры и видеокамеры, установленных так, что их оси параллельны, и закрепленных на сканирующей платформе, размещенной на каждой мачте сотовой связи, при этом передают изображения, полученные в тепловом и видеоканалах, совместно с данными углового и азимутального направления осей камер, полученными с помощью угломерно-азимутного измерителя, на центральный сервер, в котором преобразуют изображения, полученные от тепловизионных и видеокамер, и данные от угломерно-азимутных измерителей, расположенных на мачтах сотовой связи, в систему географических координат, осуществляют привязку очагов возгорания к географическим координатам с отображением на электронной карте местности, накладывают видеоизображение на изображение от тепловизионной камеры и выводят полученные изображения в виде трех отдельных изображений - полученного наложением разносенсорного панорамного изображения, тепловизионного изображения и видеоизображения на монитор оператора и/или на запоминающее устройство.
2. Комплексная система раннего обнаружения лесных пожаров, содержащая, по меньшей мере, два тепловизионно-телевизионных модуля кругового сканирования местности, расположенных на мачтах сотовой связи, каждый тепловизионно-телевизионный модуль образован тепловизионной камерой и видеокамерой, установленными так, что их оси параллельны, угломерно-азимутным измерителем, ось которого параллельна осям тепловизионной камеры и видеокамеры, и контроллером управления, при этом тепловизионная камера, видеокамера и угломерно-азимутный измеритель закреплены на сканирующей платформе, установленной на мачте сотовой связи и имеющей возможность вращения относительно вертикальной оси и поворота относительно горизонтальной оси, причем выходы тепловизионной камеры, видеокамеры и угломерно-азимутного измерителя связаны с первым-третьим входами контроллера управления, вход устройства управления движением сканирующей платформы связан с первым выходом контроллера, четвертый вход контроллера управления связан с блоком глобальной навигационной спутниковой системы, при этом система снабжена телекоммуникационным модулем, осуществляющим беспроводную связь с центральным сервером, причем телекоммуникационный модуль связан входом-выходом соответственно со вторым выходом и пятым входом контроллера управления.
3. Комплексная система раннего обнаружения лесных пожаров по п.2, отличающаяся тем, что она снабжена устройством сбора метеоданных, выход которого связан с шестым входом контроллера управления.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОЖАРА И ОПРЕДЕЛЕНИЯ ЕГО МЕСТА | 2004 |
|
RU2342709C2 |
| Передвижной стреловый кран | 1948 |
|
SU76808A1 |
| АВТОМАТИЧЕСКОЕ АСИММЕТРИЧНОЕ ОБНАРУЖЕНИЕ УГРОЗЫ С ИСПОЛЬЗОВАНИЕМ ОТСЛЕЖИВАНИЯ В ОБРАТНОМ НАПРАВЛЕНИИ И ПОВЕДЕНЧЕСКОГО АНАЛИЗА | 2005 |
|
RU2316821C2 |
| EP 1667453 A1, 07.06.2006 | |||
| US 6400265 B1, 04.06.2002. | |||

