Изобретение относится к области пожаротушения и может быть использовано для наведения пожарного робота путем передачи координат очага возгорания в систему управления пожарным роботом.
Известна комплексная система раннего обнаружения лесных пожаров, построенная на принципе разносенсорного панорамного обзора местности с функцией высокоточного определения очага возгорания. В данной системе используется тепловизионно-телевизионный модуль, образованный тепловизионной камерой и видеокамерой и угломерно-азимутным измерителем, установленные так, что их оси параллельны. Данные с такого модуля для обработки и анализа передаются в локальный контроллер и центральный сервер.
Тепловизионная камера, видеокамера и угломерно-азимутный измеритель закреплены на сканирующей платформе, установленной на мачте сотовой связи и имеющей возможность вращения относительно вертикальной оси и поворота относительно горизонтальной оси, причем выходы тепловизионной камеры, видеокамеры и угломерно-азимутного измерителя связаны с первым-третьим входами контроллера управления, вход устройства управления движением сканирующей платформы связан с первым выходом контроллера, четвертый вход контроллера управления связан с блоком глобальной навигационной спутниковой системы. Система снабжена телекоммуникационным модулем, осуществляющим беспроводную связь с центральным сервером, причем телекоммуникационный модуль связан входом-выходом соответственно со вторым выходом и пятым входом контроллера управления (см. патент на изобретение №2486594, МПК G08B13/194).
Недостатком такого модуля является отсутствие самодиагностики его составных частей, что может привести к некорректной работе и фатальным ошибкам всей системы в целом.
Известен также роботизированный пожарный комплекс с полнопроцессной системой управления, содержащий две и более роботизированные установки пожаротушения, включающие в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом, датчик давления и пульт управления, соединенные с блоком коммутации на входе, а на его выходе - с устройством управления, в котором формируются управляющие команды по наведению ствола и пожаротушению, установленное на стволе устройство обнаружения загорания и теленаблюдения, соединенное с устройством цифровой обработки сигнала в ИК-диапазоне, в котором программно реализуются алгоритмы определения координат очага загорания, соединенного с видеоконтрольным устройством, адресные пожарные извещатели, соединенные с приемно-контрольным устройством, отличающийся тем, что дополнительно введен блок управления процессом пожаротушения, соединенный на входе с приемно-контрольным устройством, устройством цифровой обработки сигнала в ИК-диапазоне и дополнительно введенными блоком контроля загорания, соединенным также с устройством цифровой обработки сигнала в ИК-диапазоне, и таймером, а на выходе с устройством управления и блоком контрольного поиска, соединенным также с устройством управления (см. патент на изобретение 2424837, МПК A62C 35/00).
Недостатком данного решения является отсутствие алгоритма обнаружения и тушения 2-х и более одновременных очагов возгорания.
Наиболее близким является решение по патенту на полезную модель РФ №113046, МПК G08B13/194, комплексная система раннего обнаружения лесных пожаров, построенная на принципе разносенсорного панорамного обзора местности с функцией высокоточного определения очага возгорания. Данная система содержит в своем составе, по меньшей мере, два тепловизионно-телевизионных модуля кругового сканирования местности, расположенных на мачтах сотовой связи, каждый тепловизионно-телевизионный модуль образован тепловизионной камерой и видеокамерой, установленными так, что их оси параллельны, угломерно-азимутным измерителем, ось которого параллельна осям тепловизионной камеры и видеокамеры, и контроллером управления, при этом тепловизионная камера, видеокамера и угломерно-азимутный измеритель закреплены на сканирующей платформе, установленной на мачте сотовой связи и имеющей возможность вращения относительно вертикальной оси и поворота относительно горизонтальной оси, причем выходы тепловизионной камеры, видеокамеры и угломерно-азимутного измерителя связаны с первым-третьим входами контроллера управления, вход устройства управления движением сканирующей платформы связан с первым выходом контроллера, четвертый вход контроллера управления связан с блоком глобальной навигационной спутниковой системы, при этом система снабжена телекоммуникационным модулем, осуществляющим беспроводную связь с центральным сервером.
Однако следует отметить, что обнаружение очагов возгорания модулем системы осуществляется только по тепловизионному изображению, изображение с камеры видимого спектра не подвергается анализу. Это может негативно повлиять на помехозащищенность модуля и системы в целом. Также отсутствует самодиагностика модуля обнаружения очагов возгорания.
Задачей полезной модели является разработка устройства, совмещающего функции пожарного извещателя с функцией управления системой УПР (установка пожаротушения роботизированная), с функцией передачи точных координат и размеров как одного, так и нескольких очагов возгорания, а также передачи координат и размеров областей с аварийно высокой температурой в систему управления пожарными роботами.
Технический результат заключается в расширении функциональных возможностей устройства при работе в системе УПР (системе пожарных роботов), а именно первичное обнаружение пожара и инициация системы УПР для более быстрой реакции системы на возникновение пожара, обеспечение возможности передачи точных координат и размеров как одного очага возгорания, так и нескольких в систему управления пожарными роботами для осуществления алгоритмов тушения системой УПР нескольких очагов одновременно при повышении помехоустойчивости извещателя к ложному срабатыванию, а также передачи координат и размеров областей с аварийно высокой температурой для осуществления автоматического и точного орошения конструкций роботизированными лафетными стволами, обеспечение обратной связи с системой управления ПР (пожарный робот) с целью синхронизации работы ПР и алгоритма работы извещателя, а также управления двигателями лафетного ствола для более быстрого наведения ствола на очаг возгорания, а также возможностью определения наличия людей в области подачи огнетушащего вещества (ОТВ).
Поставленная задача решается тем, что пожарный извещатель, включающий модуль IP-видеокамеры и модуль тепловизионной камеры, соединенные с модулем вычислителя, а также модуль питания, согласно решению, дополнительно содержит модуль обратной связи, модуль вычислителя содержит программные блоки получения, обработки и сопоставления видео и тепловизионной информации, позволяющие проводить анализ и сопоставление в видимом и ИК-спектре одновременно и принимать решение о наличие очагов пламени, вычислять их координаты и размеры относительно видеоматрицы с более высоким разрешением, чем тепловизионная, все модули расположены на одной плате и помещены в корпус, модули видеокамеры и тепловизионной камеры расположены на минимальном расстоянии друг от друга, так что их оптические оси параллельны и полученные данные позволяют проводить наложение и сопоставление двух изображений с погрешностью, не превышающей точность получения координат регистрируемого пламени, при этом вычислитель выполнен с возможностью передачи координат на внешнее устройство и управления двигателями роботизированного лафетного ствола.
Устройство содержит программный блок самодиагностики с функцией проверки чистоты стекла.
Устройство содержит программный блок поиска и детектирования людей в зоне подачи огнетушащего вещества (ОТВ) для аварийной остановки пожаротушения.
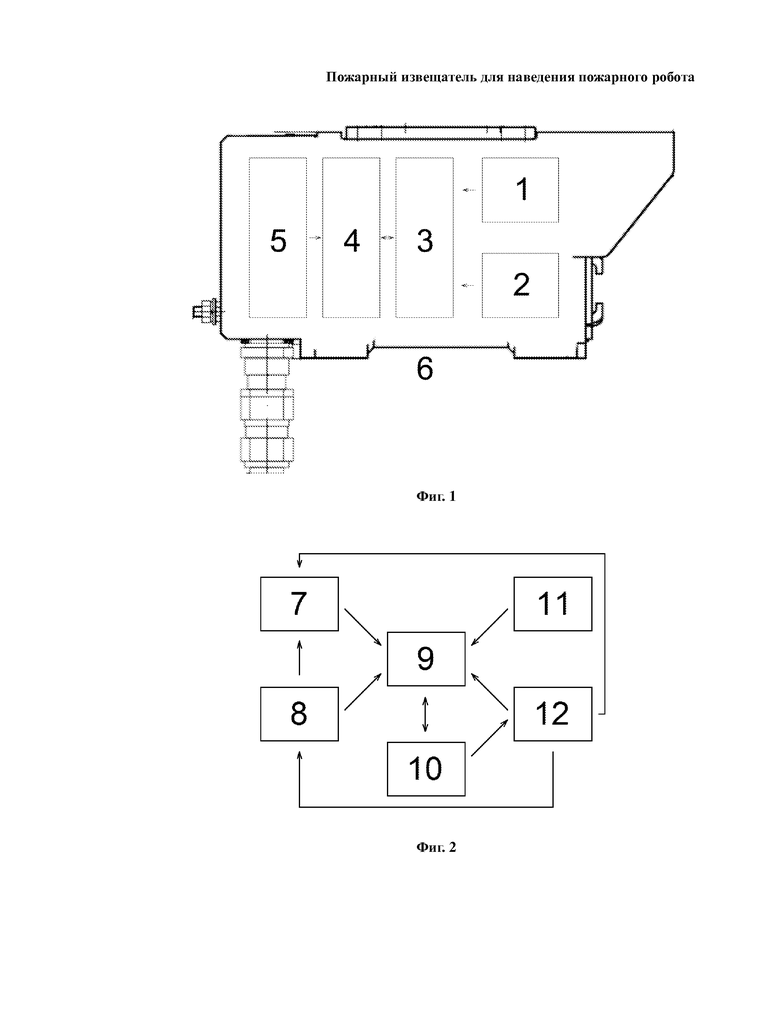
Изобретение поясняется чертежами фиг. 1, 2. На фиг. 1 представлена аппаратная схема устройства, на фиг.2 программная схема устройства.
Позициями на чертежах обозначены:
1 – модуль IP-видеокамеры;
2 – модуль тепловизионной камеры;
3 – модуль вычислителя,
4 – модуль обратной связи,
5 – модуль питания,
6 – корпус.
7 — программный модуль получения и анализа изображения с IP-видеокамеры;
8 — программный модуль получения и анализа изображения с тепловизионной камеры;
9 — программный модуль принятия решения,
10 — программный модуль обратной связи,
11 — программный модуль поиска образа людей по видеоизображению питания,
12 — программный модуль самодиагностики.
Устройство содержит аппаратные модули 1-5, размещенные на одной плате и помещенные в один корпус 6. Модули видеокамеры и тепловизионной камеры расположены на минимальном расстоянии друг от друга, так что их оптические оси параллельны и полученные данные позволяют проводить наложение и сопоставление двух изображений с погрешностью, не превышающей точность получения координат регистрируемого пламени. В лицевой части корпуса 6 предусмотрены 2 смотровых стекла для видеокамеры и тепловизионной камеры.
Модуль 1 представляет собой видеоматрицу с высоким разрешением. Модуль 2 выполнен в виде тепловизионной матрицы с небольшим разрешением. Модуль вычислителя 3 выполнен в виде мощного SoC-процессора и включает в себя программные модули 7-12. Аппаратный модуль обратной связи 4 включает в себя драйвер интерфейса, регулятор, в программном модуле 10 содержится необходимое для работы модуля ПО.
Устройство работает следующим образом. Сигналы с модуля видеокамеры 1 и с модуля тепловизионной камеры 2 поступают в модуль вычислителя 3. В модуле вычислителя 3 содержатся программные блоки получения и сопоставления видео и тепловизионной информации 7, 8, 9, где происходит обработка и анализ поступивших данных с двух модулей. Поиск очагов возгорания происходит в следующем порядке: сначала (в модуле 8) программно детектируются области с высокой температурой, затем набирается ряд кадров для оценки спектральных характеристик флуктуаций температуры в каждой из областей. Одновременно с анализом тепловизионных данных происходит программная обработка кадров, полученных с видеокамеры (в модуле 7), — анализируются области, соответствующие тепловизионным областям с высокой температурой. С помощью методов видеоаналитики (цветовая сегментация, спектральный анализ, нейронная сеть) детектируется наличие образа огня в выделенных областях. Решение о наличии огня, а также сопоставление изображений с видеокамеры и тепловизора происходит в модуле 9. Положительный результат анализа тепловизионных данных и данных с видеокамеры, а также совпадение координат найденного объекта на этих двух изображениях свидетельствует о наличии огня. Первоначально координаты найденных областей рассчитаны относительно тепловизионной матрицы с низким разрешением. Однако после анализа видеоданных и корректировки размеров огненных областей относительно видеоматрицы, данные по координатам становятся более точными.
Также устройство в модуле 11 содержит программный блок поиска и детектирования людей по видеоизображению. Так как огнетушащее вещество подается лафетным стволом под большим давлением - находиться в области подачи ОТВ опасно. Данный программный блок содержит методы видеоаналитики, позволяющие обнаруживать людей в зоне подачи ОТВ и посылать сигнал в модуль обратной связи 10 на остановку пожаротушения.
Данные с координатами найденных областей с огнем передаются с модуля вычислителя 3 в модуль обратной связи 4 устройства, откуда они в цифровой форме поступают на внешнее исполнительное устройство (двигатели лафетного ствола). В свою очередь, с внешнего устройства данные о положениях двигателя поступают в модуль обратной связи 4 устройства, а с него в модуль вычислителя 3 . Таким образом, проводится быстрое наведение лафетного ствола на очаг возгорания. Связь между устройством и двигателями лафетного ствола осуществляется напрямую и исключает длинные линии и промежуточные устройства.
Также на модуль обратной связи 4 могут приходить внешние сигналы о состоянии системы УПР, что позволяет переключать устройство в разные режимы работы:
1. режим - поиск очагов возгорания и передача координат на внешнюю систему для включения пожаротушения, также поиск очагов возгорания в заданном секторе (координаты сектора приходят от системы УПР).
2. режим - поиск только перегретых конструкций и передача координат на внешнюю систему для осуществления орошения.
3. режим - поиск людей в области подачи огнетушащего вещества (ОТВ).
Это позволяет быстро и «на ходу» менять алгоритм работы пожарного робота, в зависимости от задачи.
Программный блок самодиагностики содержится в модуле 12. Блок самодиагностики опрашивает статусы состояний модулей видеокамеры, тепловизионной камеры, модуля обратной связи, а также содержит алгоритм проверки чистоты стекла устройства посредством анализа видеоизображения (содержит методы проверки фокуса, контраста, изменения яркости получаемого с видеокамеры изображения).
Предлагаемое устройство используется для наведения роботизированного лафетного ствола (пожарного робота). Устройство может устанавливаться непосредственно на лафетном стволе, может устанавливаться стационарно. Устройство позволяет обнаруживать открытые очаги пламени, перегретые конструкции, объекты и передавать их угловые координаты в систему управления РП для осуществления процесса пожаротушения и/или орошения конструкций, а также, благодаря модулю обратной связи, менять алгоритм работы в зависимости от состояния системы УПР, управлять двигателями лафетного ствола.
Программные блоки получения и сопоставления видео и тепловизионной информации 7,8,9 комбинируют обработку тепловизионных данных и данных с видеокамеры. За счет этого разрешение видимого тепловизором объекта можно увеличить и, как следствие, увеличить точность передаваемых координат.
Данное решение позволяет:
- использовать устройство как устройство обнаружения и наведения лафетного ствола не только на очаги возгорания, но и на перегретые объекты, для осуществления охлаждения конструкций;
- более точно определять координаты объекта (за счет близкого расположения тепловизора и видеокамеры) и в результате повысить точность наведения лафетного ствола на очаги возгорания, с возможностью определения более горячих зон пламени;
- уменьшить стоимость устройства за счет применения тепловизора с маленьким разрешением матрицы, но с сохранением точности наведения лафетного ствола;
- за счет того, что при поиске очага возгорания (процесс сканирования ПР) используется тепловизор и видеокамера с большим углом обзора, а не узконаправленный ИК-сканер - увеличивается скорость обнаружения очага пламени и соответственно наведения лафетного ствола.
- производить первичное обнаружение пожара и инициацию системы УПР или в резерве с системой АПС для более быстрой реакции системы на возникновение пожара.
- находить несколько очагов возгорания одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С ПРИМЕНЕНИЕМ ПОЖАРНЫХ РОБОТОВ ВЫСОКОГО ДАВЛЕНИЯ | 2008 |
|
RU2391125C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС НА БАЗЕ ПОЖАРНЫХ МИНИ-РОБОТОВ-ОРОСИТЕЛЕЙ С СИСТЕМОЙ УДАЛЕННОГО ДОСТУПА | 2018 |
|
RU2677622C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С СИСТЕМОЙ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2010 |
|
RU2433847C1 |
Изобретение относится к области пожаротушения и может быть использовано для наведения пожарного робота путем передачи координат очага возгорания в систему управления пожарным роботом.
Задачей полезной модели является разработка устройства, совмещающего функции пожарного извещателя с функцией управления установкой пожаротушения роботизированной, с функцией передачи точных координат и размеров как одного, так и нескольких очагов возгорания, а также передачи координат и размеров областей с аварийно высокой температурой в систему управления пожарными роботами.
Технический результат заключается в расширении функциональных возможностей устройства при работе в системе УПР (системе пожарных роботов), а именно первичное обнаружение пожара и инициация системы УПР для более быстрой реакции системы на возникновение пожара, обеспечение возможности передачи точных координат и размеров как одного очага возгорания, так и нескольких в систему управления пожарными роботами для осуществления алгоритмов тушения системой УПР нескольких очагов одновременно при повышении помехоустойчивости извещателя к ложному срабатыванию, а также передачи координат и размеров областей с аварийно высокой температурой для осуществления автоматического и точного орошения конструкций роботизированными лафетными стволами, обеспечение обратной связи с системой управления ПР (пожарный робот) с целью синхронизации работы ПР и алгоритма работы извещателя, а также управления двигателями лафетного ствола для более быстрого наведения ствола на очаг возгорания, а также возможностью определения наличия людей в области подачи огнетушащего вещества (ОТВ).
Устройство содержит программные блоки получения, обработки и сопоставления видео и тепловизионной информации, позволяющие проводить анализ и сопоставление в видимом и ИК-спектре одновременно и принимать решение о наличии очагов пламени, вычислять их координаты и размеры относительно видеоматрицы с более высоким разрешением, чем тепловизионная; аппаратный модуль обратной связи, позволяющий корректировать алгоритм работы извещателя (в зависимости от режима работы пожарного робота) и управлять двигателями лафетного ствола при наведении; программный блок самодиагностики, программный блок поиска и детектирования людей. 2 з.п. ф-лы, 2 ил.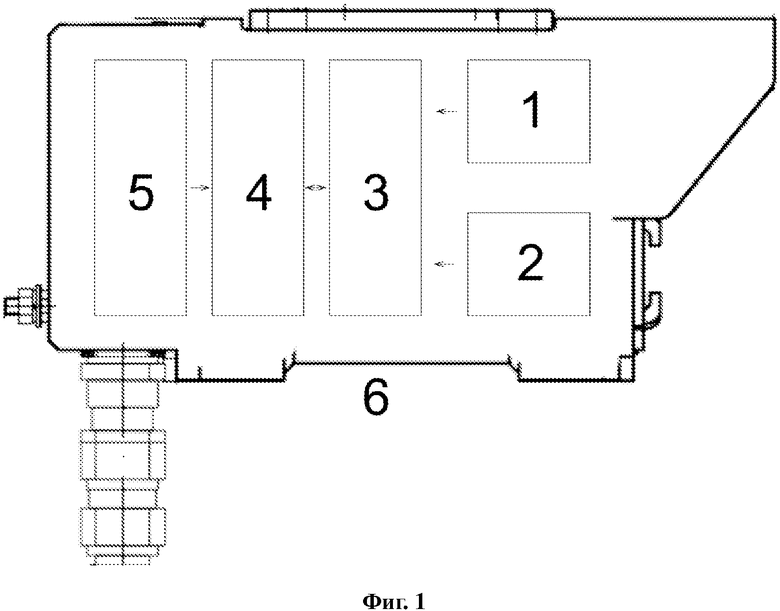
1. Пожарный извещатель, включающий модуль IP-видеокамеры и модуль тепловизионной камеры, соединенные с модулем вычислителя, а также модуль питания, отличающийся тем, что дополнительно содержит модуль обратной связи, модуль вычислителя содержит программные блоки получения, обработки и сопоставления видео и тепловизионной информации, позволяющие проводить анализ и сопоставление в видимом и ИК-спектре одновременно и принимать решение о наличие очагов пламени, вычислять их координаты и размеры относительно видеоматрицы с более высоким разрешением, чем тепловизионная, все модули расположены на одной плате и помещены в корпус, модули видеокамеры и тепловизионной камеры расположены на минимальном расстоянии друг от друга, так что их оптические оси параллельны и полученные данные позволяют проводить наложение и сопоставление двух изображений с погрешностью, не превышающей точность получения координат регистрируемого пламени, при этом вычислитель выполнен с возможностью передачи координат на внешнее устройство и управления двигателями роботизированного лафетного ствола.
2. Извещатель по п. 1, отличающийся тем, что устройство содержит программный блок самодиагностики с функцией проверки чистоты стекла.
3. Извещатель по п. 1, отличающийся тем, что устройство содержит программный блок поиска и детектирования людей в зоне подачи огнетушащего вещества для аварийной остановки пожаротушения.
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2411974C1 |
| US 0006064064 A1 16.05.2000 | |||
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| Орлов С., Видеонаблюдение по IP, Журнал сетевых решений/LAN, Издательство "Открытые системы", май 2010 | |||
| Волков В.Г., Тепловизионные приборы для спецтехники, Спецтехника и связь, Издательство ООО "Спецтехника и связь", выпуск 1, 2011 | |||
| Способ улучшения рабочих характеристик гистерезисного двигателя | 1958 |
|
SU119918A1 |
| Способ получения гидратронового спирта | 1959 |
|
SU129651A1 |
| RU 2011132022 A 10.11.2011. | |||

