Изобретение относится к области радиотехники, в частности к способам и устройствам слежения за задержкой широкополосных сигналов, построенных на основе фазовой манипуляции псевдослучайными кодовыми последовательностями, используемых в системах радиосвязи, работающих в каналах с многолучевым распространением, и может быть использовано в радиоэлектронных системах связи, использующих обработку фазоманипулированных сигналов.
Система слежения за временной задержкой сигнала используется в цифровых системах связи с широкополосными сигналами. Для получения стабильного качества синхронизации такие системы строят на основе использования цифровых методов, при этом процесс управления имеет дискретный характер, параметры функциональных преобразований имеют постоянное значение и обеспечивается уровень качества слежения, близкий к расчетным показателям. Работа такой системы основана на подстройке временного положения (временной задержки) опорного сигнала относительно принимаемого с целью обеспечения максимальной мощности сигнала на выходе системы. При этом предполагается, что предварительно уже решена задача быстрого определения временной задержки сигнала относительно опорного, что позволяет совместить демодулирующую и модулирующую последовательность с точностью, обеспечивающей попадание в зону дискриминационной характеристики системы слежения для получения достаточного уровня полезной составляющей сигнала рассогласования. Процедура слежения предназначена для устранения остаточной неопределенности по задержке и поддержания синхронности в условиях, когда действуют факторы, приводящие к нарушениям синхронизации, а именно аддитивные помехи, нестабильность тактовых частот и т.д.
Известные способы слежения состоят в следующем. На каждом шаге принимаемый сигнал умножается на три копии сигнала, сдвинутые относительно друг друга по времени. Сигналы с выходов второго и третьего перемножителей, полученные в результате умножения на копии, фильтруются и возводятся в квадрат. Таким образом формируются значения взаимно корреляционных функций запаздывающей и опережающей копий входного сигнала. Полученные сигналы суммируются. На выходе сумматора формируется разностный сигнал, характеризующий ошибку временной синхронизации. Временная позиция копий сигнала с выхода опорного генератора изменяется до тех пор, пока сигнал ошибки не станет равным нулю. Входной сигнал со снятой широкополосной модуляцией, содержащий информацию, снимается с первого перемножителя.
Наиболее близким техническим решением к заявляемому изобретению является устройство и способ его реализации, описанные в статье А.Гонзалес, В.Руис, М.И.Лопес, С.Валдеолмиллос [Моделирование устройства слежения за задержкой второго порядка в условиях многолучевого распространения. A.Gonzalez, В.Ruiz, М.I.Lopez, С.Valdeolmillos. Simulation of a second order delay locked loop in multipath environment. IEEE 0-7803-1266-X/93].
Недостатком известных способов являются. существенные потери, связанные с умножением двух широкополосных радиосигналов, что приводит к потерям энергии до 10 дБ (Шумоподобные сигналы в системах передачи информации. Под ред. В.Б.Пестрякова, Москва: Советское радио, 1973 г., стр.263).
Устройство, выбранное в качестве ближайшего аналога, содержит три параллельные ветви обработки, первая из которых содержит перемножитель, на выходе которого появляется информационный сигнал, который содержится во входном широкополосном сигнале, а вторая и третья - последовательно соединенные перемножитель, фильтр и квадратор в каждой ветви обработки, при этом перемножитель и фильтр во второй и третьей ветвях обработки выполняют функцию корреляторов, на выходе которых формируются значения взаимно корреляционных функций входного сигнала и его запаздывающей и опережающей копий, а также содержит генератор псевдослучайных последовательностей, сумматор, фильтр низкой частоты в кольце обратной связи и управляемый генератор. При временной рассинхронизации принимаемого сигнала и сигнала, генерируемого генератором псевдослучайной последовательности, величины корреляционных функций не равны в каналах опережения и отставания. На выходе сумматора присутствует разностный сигнал, характеризующий ошибку временной синхронизации. Временная позиция опорного генератора изменяется до тех пор, пока сигнал ошибки не станет равным нулю.
Недостатком известного устройства является высокая техническая сложность, так как для приема широкополосного сигнала с неизвестными случайными параметрами требуются дополнительные блоки, например при случайной начальной фазе сигнала в корреляционном приемнике необходим второй (квадратурный) канал, содержащий те же блоки, и схема выделения огибающей.
Задачей, на решение которой направлен предлагаемый способ, является упрощение схемы обработки широкополосного сигнала.
Технический результат, достигаемый реализацией предлагаемого способа, заключается в новом подходе к построению схемы обработки с использованием в качестве образца непосредственно манипулирующей последовательности и снятия широкополосной модуляции с использованием инвертирования отдельных элементов исходного сигнала.
Указанная задача достигается тем, что в способ слежения за задержкой широкополосного сигнала, включающий формирование двух откликов на образец широкополосного сигнала, сравнение полученных откликов и корректировку временного положения опорного сигнала относительно принимаемого, перед фильтрацией введены операции инвертирования и коммутирования сигнала.
Задачей, для решения которой предназначено предлагаемое устройство, является уменьшение потерь, вносимых схемой обработки.
Технический результат, достигаемый реализацией предлагаемого устройства, заключается в уменьшении количества элементов схемы.
Указанная задача достигается тем, что в устройство слежения за задержкой широкополосного сигнала, содержащее фильтр, генератор образца, вычитающее устройство и управляющее устройство, дополнительно в начало схемы введены инвертирующий усилитель и блоки деманипуляции и обработки. Каждый из блоков деманипуляции и обработки содержит управляемый коммутатор и селективный узкополосный фильтр, при этом сигнальные выходы управляемых коммутаторов соединены с соответствующими входами фильтров, входы коммутатора являются входами блока деманипуляции и обработки, выходы фильтров являются выходами блоков деманипуляции и обработки.
Способ слежения за задержкой широкополосного сигнала состоит в следующем. Принимаемый сигнал, состоящий из суммы фазоманипулированного сигнала и помех, инвертируется по амплитуде. Широкополосная модуляция снимается с полученного сигнала под управлением образца сигнала следующим образом. Формируется образец сигнала, представляющий собой манипулирующую последовательность из двоичных символов 0 и 1. Из образца формируется 3 копии сигнала с разным временным сдвигом. Далее формируется 3 сигнала со снятой широкополосной манипуляцией из неинвертированных и инвертированных элементов исходного принимаемого сигнала следующим образом. Если двоичный символ копии образца равен 1, используется инвертированный элемент принимаемого сигнала, если двоичный символ копии образца равен 0, используется неинвертированный элемент сигнала. Длительность двоичных символов образца совпадает с длительностью элемента широкополосного сигнала. Сигналы с фильтров, соответствующих запаздывающей и опережающей копиям, детектируются и вычитаются. Разность, пропорциональная разности мощностей, выделяемых селектирующими фильтрами, подается на блок управления положением манипулирующей последовательности на оси времени по отношению к принимаемому сигналу. Временное положение образца сигнала с выхода генератора корректируется для уравнивания мощностей сигналов на выходах селектирующих фильтров в зависимости от знака разности. В силу симметрии автокорреляционной функции широкополосного сигнала относительно нулевого сдвига, точка равновесия соответствует подаче на вход управляемого коммутатора, соответствующего нулевому сдвигу, копии последовательности, согласованной по задержке с манипулирующей последовательностью принимаемого широкополосного сигнала. Поэтому с выхода соответствующего фильтра будет сниматься аддитивная смесь демодулированного сигнала (узкополосного), содержащего полезную информацию и помехи. При нулевом рассогласовании по задержке информационный сигнал выделяется из аддитивной смеси без уменьшения его мощности.
Функциональная схема устройства слежения, работающего по предлагаемому способу, представлена на фиг.1.
Устройство содержит:
1 - усилитель с прямым и инверсным выходами,
21…23 - управляемые коммутаторы,
31…33 - селективные узкополосные фильтры,
41, 42 - детекторы,
5 - вычитающее устройство,
6 - блок управления сдвигом образца сигнала,
7 - генератор манипулирующей последовательности,
81, 82 - элементы дискретных задержек.
При этом вход усилителя 1 является входом схемы устройства слежения. Выходы усилителя соединены с соответствующими сигнальными входами управляемых коммутаторов 21…23. Каждый управляемый коммутатор 21…23 имеет два сигнальных входа, один сигнальный выход и один вход управления. Неинверсные входы управляемых коммутаторов 21…23 объединены параллельно и соединены с неинвертирующим выходом усилителя 1. Инверсные входы управляемых коммутаторов 21…23 объединены параллельно и соединены с инветирующим выходом усилителя 1. Управляющие входы коммутаторов 21…22 соединены с выходами цепи последовательно соединенных элементов дискретных задержек 81 и 82. Причем управляющие входы коммутаторов 21 и 23 соединены с выходами соответствующих элементов задержки 81 и 82, последовательно соединенных между собой, управляющий вход последнего коммутатора 23 соединен с входом элемента задержки 82 и с выходом генератора 7 манипулирующей последовательности. Выходы управляемых коммутаторов 21…23 соединены с входами селектирующих фильтров 31…33. Выходы селектирующих фильтров 31 и 33 соединены с входами детекторов 41 и 42. Выходы детекторов соединены с входами устройства 5 вычитания. Выход устройства 5 вычитания соединен с входом блока управления 6 сдвигом образца сигнала. Выход блока управления 6 сдвигом образца соединен с входом генератора 7 манипулирующей последовательности. Выход генератора 7 манипулирующей последовательности соединен с входом элемента 82 дискретной задержки и с управляющим входом коммутатора 23.
Предлагаемое устройство реализует описанный способ следующим образом. Принимаемый сигнал, состоящий из суммы полезного сигнала и помех, подается на усилитель 1 с прямым и инверсным выходами, который из исходного сигнала формирует инвертированный и неинвертированный по амплитуде сигнал. С выхода усилителя сигналы подаются на входы управляемых коммутаторов 21…23. Управляемые коммутаторы 21…23 осуществляют коммутацию одного из входов к выходу по сигналам на входах управления. Цепь дискретных задержек 81 и 82 формирует 2 копии образцов сигнала, сдвинутых относительно исходного сигнала, полученного с генератора 7 манипулирующей последовательности. Сигнал с выхода элемента 82 синхронизирован с входным сигналом, сигнал, полученный непосредственно с генератора манипулирующей последовательности, и сигнал на выходе элемента задержки 81 представляют собой запаздывающую и опережающую копию принимаемого сигнала. Величина шага подстройки определяется частотой дискретизации и при общем количестве шагов подстройки N, длительности основного лепестка автокорреляционной функции широкополосного сигнала ΔТ величина шага подстройки определяется как отношение Δt=ΔT/N. Величина сдвига между опережающей копией и копией с нулевым сдвигом, как и величина сдвига между запаздывающей копией и копией с нулевым сдвигом, задается кратной шагу подстройки. Копии образцов сигнала с генератора манипулирующей последовательности и с цепи дискретных задержек 81 и 82 подаются на управляющие входы коммутаторов 21…23 и управляют переключением входов. Если двоичный символ копии образца равен 1, к выходу коммутатора подключается инверсный вход коммутатора, если двоичный символ копии образца равен 0, к выходу коммутатора подключается неинверсный вход коммутатора на время, соответствующее длительности элемента широкополосного сигнала. Таким образом, на выходах коммутаторов 21…23 формируется 3 сигнала со снятой широкополосной манипуляцией. Полученные сигналы фильтруют селектирующими фильтрами 31…33, полоса пропускания которых соответствует полосе, занимаемой простым узкополосным сигналом со снятой фазовой манипуляцией. Детекторами выделяется огибающая сигналов с выходов фильтров 31 и 33. Таким образом, на выходах детекторов 41 и 42 формируются значения взаимно корреляционных функций запаздывающей и опережающей копий входного сигнала. Сигналы с детекторов 41 и 42 поступают на устройство 5 вычитания, в котором полученные сигналы сравниваются друг с другом. С выхода устройства 5 вычитания сигнал поступает на блок управления 6 сдвигом образца сигнала. В блоке управления 6, в зависимости от знака полученной разности сигналов, принимается решение о направлении сдвига временного положения деманипулирующей последовательности импульсов, тактирующих генератор 7 манипулирующей последовательности. Временное положение образца сигнала с выхода генератора корректируется для уравнивания мощностей сигналов на выходах селектирующих фильтров 31 и 33. Таким образом обеспечивается слежение за задержкой широкополосного сигнала.
Примером реализации устройства обнаружения служит схема обработки на сигнальном процессоре Sharc ADSP 21364. Блоки обработки сигналов, включая коммутацию, фильтрацию, детектирование, суммирование, выполнены в виде алгоритмов, реализованных программно.
Предлагаемый способ слежения за задержкой широкополосного сигнала позволяет упростить схему обработки широкополосных сигналов и уменьшить потери на обработку, что позволяет улучшить качество синхронизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470459C1 |
| Способ формирования сигналов с расширенным спектром | 2018 |
|
RU2699817C1 |
| Способ формирования сигналов с расширенным спектром | 2018 |
|
RU2699818C1 |
| УСТРОЙСТВО СВЯЗИ | 1999 |
|
RU2185033C2 |
| Способ расширения спектра сигналов | 2019 |
|
RU2714300C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШУМОПОДОБНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2023 |
|
RU2801461C1 |
| УСТРОЙСТВО ПРИЕМОПЕРЕДАЧИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1985 |
|
SU1840078A1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ СООБЩЕНИЙ ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ | 1995 |
|
RU2127486C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСВЯЗИ | 1980 |
|
SU1840131A1 |
| Способ расширения спектра сигналов | 2018 |
|
RU2699816C1 |
Изобретение относится к области радиотехники и может быть использовано в системах связи, использующих обработку фазоманипулированных сигналов. Технический результат - уменьшение потерь, связанных с умножением сигналов, и упрощение схемы обработки. Способ слежения за задержкой широкополосного сигнала включает формирование двух сигналов и фильтрацию полученных сигналов, амплитуда которых пропорциональна величине корреляционной функции между опорным сигналом и принимаемым, сравнение полученных сигналов и корректировку временного положения опорного сигнала относительно принимаемого, а также инвертирование принимаемого сигнала перед фильтрацией и коммутацию инвертированного и неинвертированного сигналов, при этом формируют образец сигнала, представляющий собой манипулирующую псевдослучайную последовательность из двоичных символов, из образца сигнала формируют копии образца сигнала с разным временным сдвигом, далее формируют сигналы со снятой широкополосной манипуляцией из неинвертированных и инвертированных элементов исходного принимаемого сигнала, причем если двоичный символ копии образца сигнала равен 1, то используют инвертированный элемент принимаемого сигнала, если двоичный символ копии образца сигнала равен 0, то используют неинвертированный элемент сигнала. 2 н. и 1 з.п. ф-лы, 1 ил.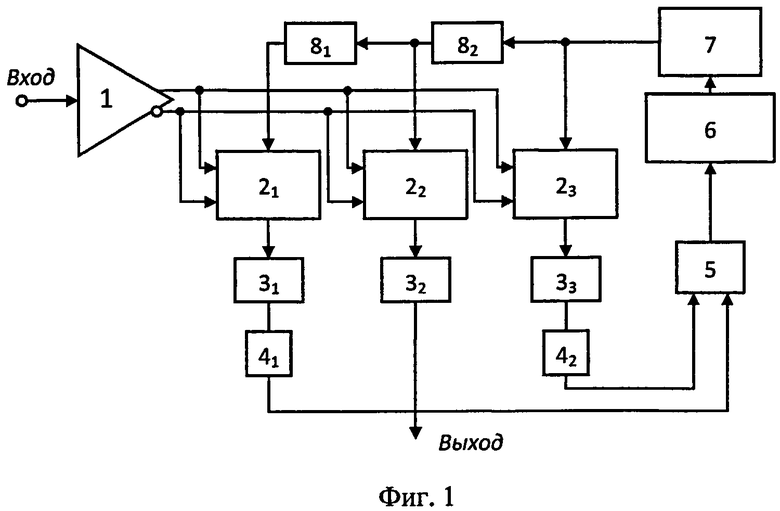
1. Способ слежения за задержкой широкополосного сигнала, включающий формирование двух сигналов и фильтрацию полученных сигналов, амплитуда которых пропорциональна величине корреляционной функции между опорным сигналом и принимаемым, сравнение полученных сигналов и корректировку временного положения опорного сигнала относительно принимаемого, отличающийся тем, что принимаемый сигнал перед фильтрацией инвертируют и коммутируют инвертированный и неинвертированный сигналы, при этом проводится операция снятия широкополосной модуляции, а именно формируют образец сигнала, представляющий собой манипулирующую псевдослучайную последовательность из двоичных символов, из образца сигнала формируют копии образца сигнала с разным временным сдвигом, далее формируют сигналы со снятой широкополосной манипуляцией из неинвертированных и инвертированных элементов исходного принимаемого сигнала, причем, если двоичный символ копии образца сигнала равен 1, то используют инвертированный элемент принимаемого сигнала, если двоичный символ копии образца сигнала равен 0, то используют неинвертированный элемент сигнала.
2. Устройство слежения за задержкой широкополосного сигнала, содержащее фильтр, генератор образца, вычитающее устройство и управляющее устройство, отличающееся тем, что в начало схемы дополнительно введен инвертирующий усилитель и блоки деманипуляции и обработки сигнала, вход усилителя является входом устройства слежения, выходы усилителя соединены с соответствующими сигнальными входами блоков деманипуляции и обработки, неинверсные входы блоков деманипуляции и обработки объединены параллельно и соединены с неинвертирующим выходом усилителя, инверсные входы блоков деманипуляции и обработки объединены параллельно и соединены с инветирующим выходом усилителя, управляющие входы блоков деманипуляции и обработки соединены с выходами цепи последовательно соединенных элементов дискретных задержек, причем управляющие входы блоков деманипуляции и обработки соединены с выходами соответствующих элементов задержки, последовательно соединенных между собой, управляющий вход последнего блока деманипуляции и обработки соединен с входом элемента задержки и с выходом генератора манипулирующей последовательности, выходы управляемых коммутаторов соединены с входами селектирующих фильтров, выходы которых соединены со входами устройства вычитания через детекторы, а выход устройства вычитания соединен с входом блока управления сдвигом образца сигнала, выход блока управления сдвигом образца соединен также с входом генератора манипулирующей последовательности, выход которого соединен с входом элемента дискретной задержки и с управляющим входом блока деманипуляции и обработки.
3. Устройство по п.2, отличающееся тем, что каждый из блоков деманипуляции и обработки содержит управляемый коммутатор и селективный узкополосный фильтр, при этом сигнальные выходы управляемых коммутаторов соединены с соответствующими входами фильтров, входы коммутатора являются входами блока деманипуляции и обработки, выходы фильтров являются выходами блоков деманипуляции и обработки.
| АВТОМАТ ШТУРМОВОЙ МАЙ 45-го, АШМ-45, АВТОМАТ 45-го КАЛИБРА | 2006 |
|
RU2313750C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ВРЕМЕННОЙ ЗАДЕРЖКОЙ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2157593C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ СИГНАЛА | 1997 |
|
RU2128398C1 |
| US 5347536 A, 13.09.1994 | |||
| US 3947634 A, 30.03.1976 | |||
| US 5850420 A, 15.12.1998. | |||

