Изобретение относится к области радиотехники, в частности к способам и устройствам обнаружения широкополосных сигналов в системах радиосвязи, и может быть использовано в приемных устройствах радиоэлектронных систем связи, использующих фазоманипулированные сигналы.
Особенностью широкополосных сигналов является узкий основной пик их автокорреляционной функции. Ширина основного пика много меньше длительности самого сигнала, что приводит к наличию неопределенности положения пика корреляционной функции на временной оси. Таким образом, при приеме широкополосных сигналов необходимо использовать специальную процедуру обнаружения. Процедура обнаружения служит для устранения начальной неопределенности по задержке до величины, обеспечивающей необходимое отношение сигнал/помеха в отклике на широкополосный сигнал. Требуемое отношение сигнал/помеха должно обеспечивать надежную работу процедуры сопровождения, устраняющей остаточную неопределенность и поддерживающей синхронизм в условиях, когда действуют факторы, приводящие к нарушениям синхронизма (аддитивные помехи, нестабильность тактовых частот и т.д.).
Наиболее близким техническим решением (прототипом) к заявляемому способу обнаружения широкополосного сигнала является способ, описанный в книге «Системы связи с шумоподобными сигналами» Л.Е.Варакин, Москва: Радио и связь, 1985 г., стр.25-28. Способ основан на использовании корреляторов. Путем вычисления величины корреляционной функции в текущий момент времени определяется положение максимума, что соответствует решению задачи начальной синхронизации. Способ последовательного обнаружения состоит в следующем. На каждом шаге сумма широкополосного сигнала и помех умножается на копию принимаемого сигнала. Сигнал, полученный в результате умножения на копию, накапливается в интеграторе. Накопленный сигнал сравнивается с порогом. Если сигнал превысил порог, принимается решение о наличии сигнала. Если сигнал не обнаружен, временное положение копии сигнала относительно входного сигнала изменяется на фиксированную величину, соответствующую длительности шага поиска, и процедура повторяется сначала. Если сигнал обнаружен, процедура обнаружения завершается.
Недостатком известного способа являются существенные потери, связанные с умножением двух широкополосных радиосигналов. Кроме того, способ характеризуется высокой технической сложностью, так как для приема широкополосного сигнала с неизвестными случайными параметрами требуются дополнительные блоки, например при случайной начальной фазе сигнала в корреляционном приемнике необходим второй (квадратурный) канал, содержащий те же блоки, и схема выделения огибающей.
Устройство для реализации известного способа, описанное в патенте РФ №2178620, содержит коррелятор, генератор опорных сигналов, блок некогерентного накопления, блок управления и синхронизации, блок принятия решения и блок формирования и коррекции порогов. При этом первый вход коррелятора является сигнальным входом устройства, вторые входы коррелятора соединены с выходами генератора опорных сигналов, выход коррелятора соединен с входом блока некогерентного накопления, выход которого подключен к первому входу блока принятия решения, второй вход которого соединен с первым выходом блока управления и синхронизации, который является для блока принятия решения управляющим, второй выход блока управления и синхронизации соединен с первым входом блока формирования и коррекции порогов, который является информационным сигналом о номере текущей позиции области неопределенности, третий выход блока управления и синхронизации соединен со вторым входом блока формирования и коррекции порогов, который является сигналом тактовых импульсов, третий вход блока формирования и коррекции порогов соединен с выходом коррелятора и является входным сигналом оценки величины корреляции Y на интервале когерентности сигнала, четвертый вход этого блока подключен к выходу блока некогерентного накопления и является входным сигналом решающей величины Z, пятый вход соединен с первым выходом блока принятия решения и является первым сигналом принятия решения, шестой вход - с третьим выходом блока принятия решения и является вторым сигналом принятия решения, а выход блока формирования и коррекции порогов соединен с третьим входом блока принятия решения, первый выход блока принятия решения соединен с входом блока управления и синхронизации, а второй его выход является выходом устройства.
Недостатком известного устройства на корреляторах является высокая техническая сложность, обусловленная квадратурной схемой обработки, так как схема содержит шесть умножителей, фазовращатель, два фильтра, инвертор, три сумматора и два квадратора, что приводит к потерям энергии до 10 дБ («Шумоподобные сигналы в системах передачи информации» под ред. В.Б.Пестрякова, Москва: Советское радио, 1973 г., стр.263.).
Задачей настоящего изобретения является уменьшение потерь, связанных с умножением сигналов в корреляторах, и упрощение схемы обработки. Технический результат заключается в новом подходе к построению схемы обработки с использованием в качестве образца непосредственно манипулирующей последовательности и снятия широкополосной модуляции с использованием инверсии отдельных элементов исходного сигнала.
Предлагаемый способ обнаружения широкополосных сигналов является новым и позволяет устранить потери, характерные для корреляторов на умножителях, и при этом упростить схему обработки широкополосного сигнала.
Поставленная задача решается тем, что способ обнаружения широкополосного сигнала включает прием входного сигнала с последующим интегрированием, сравнение полученного сигнала с пороговым уровнем и принятие решения о наличии или отсутствии сигнала на входе обнаружителя. Принимаемый сигнал перед интегрированием инвертируют и коммутируют, снимая широкополосную модуляцию. Устройство обнаружения широкополосных сигналов содержит генератор образца сигнала, детектор максимального сигнала, блок управления, при этом вход генератора образца сигнала соединен с выходом блока управления, вход блока управления соединен с выходом детектора максимального сигнала. В устройство дополнительно введен усилитель входного сигнала и n блоков деманипуляции и обработки, при этом выходы блоков деманипуляции и обработки соединены с входами детектора максимального сигнала, выходы усилителя входного сигнала соединены с входами блоков деманипуляции и обработки. Каждый из блоков деманипуляции и обработки содержит устройство задержки, управляемый коммутатор, селективный узкополосный фильтр и детектор, при этом выход устройства задержки соединен с управляющим входом коммутатора, входы коммутатора являются входами блока деманипуляции и обработки, а его выход соединен с детектором через селективный узкополосный фильтр, причем выход детектора является выходом блока деманипуляции и обработки.
Функциональная схема устройства обнаружения широкополосных сигналов, работающего по предлагаемому способу, представлена на фиг.1.
Устройство содержит:
1 - усилитель с прямым и инверсным выходами,
21…2n - управляемые коммутаторы,
31…3n - селективные узкополосные фильтры,
41…4n - детекторы,
5 - пороговый обнаружитель сигнала,
6 - блок управления сдвигом образца сигнала,
7 - генератор манипулирующей последовательности,
81…8n-1 - элементы дискретных задержек.
Количество n параллельно работающих блоков деманипуляции и обработки определяет скорость обнаружения широкополосного сигнала и сложность схемной реализации устройства обнаружения широкополосного сигнала. Чем больше n - число параллельно работающих блоков деманипуляции и обработки устройства обнаружения, тем выше скорость обнаружения.
При этом вход усилителя 1 является входом схемы устройства обнаружения. Устройство состоит из n параллельно работающих блоков деманипуляции и обработки. Каждый блок деманипуляции и обработки состоит из последовательно соединенных блоков: управляемого коммутатора 2, селективного узкополосного фильтра 3, детектора 4. Каждый управляемый коммутатор 2 имеет два сигнальных входа, один сигнальный выход и один вход управления. Сигнальные входы управляемых коммутаторов 21…2n объединены параллельно и соединены с прямым и инверсным выходами усилителя 1. Управляющие входы коммутаторов 21…2n соединены с выходами цепи последовательно соединенных элементов дискретных задержек 81…8n-1. Причем управляющие входы коммутаторов 21…2n-1 соединены с выходами соответствующих элементов задержки 81…8n-1, последовательно соединенных между собой, управляющий вход последнего коммутатора 2n соединен с входом элемента задержки 8n-1 и с выходом генератора 7 манипулирующей последовательности. Выходы управляемых коммутаторов 21…2n соединены с входами селектирующих фильтров 31…3n. Выходы селектирующих фильтров 31…3n соединены с входами детекторов 41…4n. Выходы детекторов соединены с входами порогового обнаружителя 5. Выход обнаружителя 5 соединен с входом блока управления 6 сдвигом образца сигнала. Выход блока управления 6 сдвигом образца соединен с входом генератора 7 манипулирующей последовательности. Выход генератора 7 манипулирующей последовательности соединен с входом элемента 8n-1 дискретной задержки и с управляющим входом коммутатора 2n.
Способ, реализуемый описанным устройством, состоит в следующем. Обнаружение производится параллельно во всех интервалах n блоками деманипуляции и обработки, причем в каждом из n интервалов обнаружение производится отдельным блоком деманипуляции и обработки независимо. На каждом шаге поиска сумма фазоманипулированного сигнала и помех инвертируется по амплитуде. Процесс снятия широкополосной модуляции осуществляется под управлением образца сигнала следующим образом. Формируется образец сигнала, представляющий собой манипулирующую последовательность из двоичных символов 0 и 1. Из образца формируются n копий сигнала с разным временным сдвигом. Далее формируется n сигналов со снятой широкополосной манипуляцией из неинвертированных и инвертированных элементов исходного принимаемого сигнала следующим образом. Если двоичный символ копии образца равен 1, используется инвертированный элемент принимаемого сигнала, если двоичный символ копии образца равен 0, используется неинвертированный элемент сигнала. Полученные сигналы фильтруются, детектируются и сравниваются с порогом, при превышении порога принимается решение об обнаружении сигнала в одном из n блоков деманипуляции и обработки. Если сигнал не обнаружен, временное положение образца сигнала относительно принимаемого сигнала меняется на величину n шагов поиска и процедура повторяется с самого начала. Если сигнал обнаружен, процедура поиска завершается.
Предлагаемое устройство реализует описанный способ следующим образом. Принимаемый сигнал, состоящий из суммы полезного сигнала и помех, подается на усилитель 1 с прямым и инверсным выходами, который из исходного сигнала формирует инвертированный и неинвертированный по амплитуде сигнал. С выхода усилителя сигналы подаются на входы управляемых коммутаторов 21…2n. Управляемые коммутаторы 21…2n осуществляют коммутацию одного из входов к выходу по сигналам на входах управления. Цепь дискретных задержек 81…8n-1 формирует (n-1) копий образцов сигнала, сдвинутых относительно исходного сигнала, полученного с генератора 7 манипулирующей последовательности. Величина сдвига между соседними копиями сигнала задается равной шагу поиска. Исходный сигнал с выхода генератора 7 манипулирующей последовательности также используется для управления коммутатором. Временной сдвиг между соседними копиями образца с элементов задержки с номерами i и (i+1), где i меняется от 1 до (n-2), задается равным величине шага поиска. Таким образом, формируется n управляющих сигналов. Копии образцов сигнала с цепи дискретных задержек 81…8n-1 подаются на управляющие входы коммутаторов 21…2n и управляют переключением входов. Если двоичный символ копии образца равен 1, к выходу коммутатора подключается инверсный вход коммутатора, если двоичный символ копии образца равен 0, к выходу коммутатора подключается неинверсный вход коммутатора на время, соответствующее длительности элемента широкополосного сигнала.
Таким образом, на выходах коммутаторов 21…2n формируется n сигналов со снятой широкополосной манипуляцией. Полученные сигналы фильтруют селектирующими фильтрами 31…3n, полоса пропускания которых соответствует полосе, занимаемой простым узкополосным сигналом со снятой фазовой манипуляцией. Детекторами 41…4n выделяется огибающая сигналов с выходов фильтров 31…3n. Детектированный сигнал поступает на пороговый обнаружитель 5, в котором полученные сигналы сравниваются с пороговым уровнем, и при превышении порога в одном из блоков деманипуляции и обработки принимается решение об обнаружении сигнала. С выхода обнаружителя 5 сигнал поступает на блок управления 6 сдвигом образца сигнала в генераторе 7 манипулирующей последовательности. Блок управления 6 обеспечивает сдвиг последовательности импульсов, тактирующих генератор 7 манипулирующей последовательности. Таким образом производится обнаружение широкополосного сигнала параллельно в n точках корреляционной функции. Если сигнал не обнаружен, происходит сдвиг последовательности тактовых импульсов генератора 7 манипулирующей последовательности на величину, равную n шагам поиска. Если сигнал обнаружен, поиск завершается.
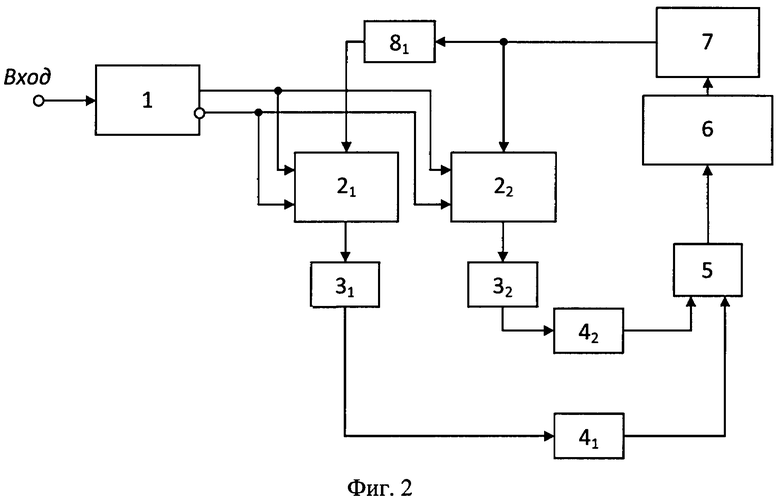
Примером реализации устройства обнаружения служит схема, приведенная на фиг.2. Устройство содержит 2 параллельно работающих блока деманипуляции и обработки. В соответствии с предлагаемым способом временной сдвиг копий сигналов с генератора 7 манипулирующей последовательности с помощью элемента задержки 8 задается равным шагу поиска. Принимаемый сигнал, состоящий из суммы полезного сигнала и помех, подается на усилитель 1 с прямым и инверсным выходами, который из исходного сигнала формирует инвертированный и неинвертированный по амплитуде сигнал. С выхода усилителя сигналы подаются на входы управляемых коммутаторов 21, 22. Управляемые коммутаторы 21, 22 осуществляют коммутацию одного из входов к выходу по сигналам на входах управления. Элемент дискретной задержки 81 формирует копию образца сигнала, задержанную относительно сигнала, полученного с генератора 7 манипулирующей последовательности. Вместе с исходным сигналом с выхода генератора 7 манипулирующей последовательности всего формируется 2 управляющих сигнала. Управляющие сигналы с цепи подаются на управляющие входы коммутаторов 21, 22 и управляют переключением входов. Если двоичный символ копии образца равен 1, к выходу коммутатора подключается инверсный вход коммутатора, если двоичный символ копии образца равен 0, к выходу коммутатора подключается неинверсный вход коммутатора на время, соответствующее длительности элемента широкополосного сигнала.
Таким образом, на выходах коммутаторов 21, 22 формируется 2 сигнала со снятой широкополосной манипуляцией. Полученные сигналы фильтруют селектирующими фильтрами 31, 32, полоса пропускания которых соответствует полосе, занимаемой простым узкополосным сигналом со снятой фазовой манипуляцией. Детекторами 41, 42 выделяется огибающая сигналов с выходов фильтров 31, 32. Детектированный сигнал поступает на пороговый обнаружитель 5, в котором полученные сигналы сравниваются с пороговым уровнем, и при превышении порога в одном из блоков деманипуляции и обработки принимается решение об обнаружении сигнала. С выхода обнаружителя 5 сигнал поступает на блок управления 6 сдвигом образца сигнала в генераторе 7 манипулирующей последовательности. Блок управления 6 обеспечивает сдвиг последовательности импульсов, тактирующих генератор 7 манипулирующей последовательности. Обнаружение широкополосного сигнала производится в двух точках корреляционной функции. Если сигнал не обнаружен, происходит сдвиг последовательности тактовых импульсов генератора 7 манипулирующей последовательности на величину, равную двум шагам поиска. Если сигнал обнаружен, поиск завершается.
Предлагаемый способ обнаружения широкополосных сигналов позволяет уменьшить потери при обработке широкополосных сигналов, что позволяет повысить помехозащищенность системы связи широкополосными сигналами.
Изобретение относится к области радиотехники, в частности к способам и устройствам обнаружения широкополосных сигналов в системах радиосвязи, и может быть использовано в приемных устройствах радиоэлектронных систем связи, использующих фазоманипулированные сигналы. Техническим результатом является уменьшение потерь, связанных с умножением сигналов в корреляторах. Технический результат достигается за счет использования способа обнаружения фазоманипулированного широкополосного сигнала, включающего прием входного сигнала с последующим интегрированием, сравнение полученного сигнала с пороговым уровнем и принятие решения о наличии или отсутствии сигнала на входе обнаружителя. Принимаемый сигнал перед интегрированием инвертируют и коммутируют, снимая широкополосную модуляцию. Устройство обнаружения широкополосных сигналов содержит генератор образца сигнала, детектор максимального сигнала, блок управления, при этом вход генератора образца сигнала соединен с выходом блока управления, вход блока управления соединен с выходом детектора максимального сигнала. 2 н. и 1 з.п. ф-лы, 2 ил.
1. Способ обнаружения широкополосного сигнала, включающий прием входного сигнала с последующим интегрированием, сравнение полученного сигнала с пороговым уровнем и принятие решения о наличии или отсутствии сигнала на входе обнаружителя, отличающийся тем, что принимаемый сигнал перед интегрированием инвертируют и коммутируют, снимая широкополосную модуляцию.
2. Устройство обнаружения широкополосных сигналов, содержащее генератор образца сигнала, детектор максимального сигнала, блок управления, при этом вход генератора образца сигнала соединен с выходом блока управления, вход блока управления соединен с выходом детектора максимального сигнала, отличающееся тем, что дополнительно введен усилитель входного сигнала, и n блоков деманипуляции и обработки, при этом выходы блоков деманипуляции и обработки соединены с входами детектора максимального сигнала, выходы усилителя входного сигнала соединены с входами блоков деманипуляции и обработки.
3. Устройство по п.2, отличающееся тем, что каждый из блоков деманипуляции и обработки содержит устройство задержки, управляемый коммутатор, селективный узкополосный фильтр и детектор, при этом выход устройства задержки соединен с управляющим входом коммутатора, входы коммутатора являются входами блока деманипуляции и обработки, а его выход соединен с детектором через селективный узкополосный фильтр, причем выход детектора является выходом блока деманипуляции и обработки.
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1983 |
|
SU1840292A1 |
| УСТРОЙСТВО ПРИЕМА ШУМОПОДОБНОГО СИГНАЛА С ПРЫГАЮЩЕЙ ЦЕНТРАЛЬНОЙ ЧАСТОТОЙ | 1980 |
|
SU1840132A1 |
| US 6844763 B1, 18.01.2005 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1992 |
|
RU2047908C1 |

