Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения, описанные в данном документе, в общем, относятся к электрическому пылесосу, включающему в себя средство детектирования количества пыли для детектирования количества пыли, проходящей через воздушный канал, сообщающийся со стороной всасывания электрического нагнетателя воздуха.
Предшествующий уровень техники
Традиционно, например, электрический пылесос с пылесборочным фильтром включает в себя основной корпус очистителя, имеющий кожух основного корпуса, вмещающий электрический нагнетатель воздуха. Блок сбора пыли, сообщающийся со стороной всасывания электрического нагнетателя воздуха, размещается в основном корпусе очистителя, и корпус, формирующий воздушный канал, в котором секционируется воздушный канал, сообщающийся со стороной всасывания электрического нагнетателя воздуха, соединяется с блоком пылесбора. От стороны основания к верхней стороне корпуса формирующего воздушный канал, корпус шланга, удлинительная трубка и напольная щетка последовательно соединяются с возможностью сообщения друг с другом. Фотодетектор в качестве средства детектирования количества пыли для детектирования количества пыли, проходящей через внутреннюю часть воздушного канала, размещается в воздушном канале, и входная мощность электрического нагнетателя воздуха, привод, размещаемый на напольной щетке и т.п., управляется в соответствии с количеством пыли, детектируемым фотодетектором.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительного варианта воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает блок-схему, иллюстрирующую внутреннюю структуру электрического пылесоса первого варианта осуществления;
Фиг.2 изображает вертикальный вид в поперечном сечении, показывающий часть электрического пылесоса;
Фиг.3 изображает общий вид, показывающий электрический пылесос;
Фиг.4 изображает таблицу, показывающую управление электрическим пылесосом;
Фиг.5 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом;
Фиг.6 изображает блок-схему, иллюстрирующую внутреннюю структуру электрического пылесоса второго варианта осуществления;
Фиг.7 изображает общий вид электрического пылесоса;
Фиг.8 изображает таблицу, показывающую управление электрическим пылесосом;
Фиг.9 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом;
Фиг.10 изображает блок-схему, иллюстрирующую внутреннюю структуру электрического пылесоса третьего варианта осуществления;
Фиг.11 изображает вид сверху, показывающий часть корпуса с всасывающим отверстием электрического пылесоса;
Фиг.12 изображает таблицу, показывающую управление электрическим пылесосом;
Фиг.13 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом;
Фиг.14 изображает блок-схему, иллюстрирующую внутреннюю структуру электрического пылесоса четвертого варианта осуществления;
Фиг.15 изображает таблицу, показывающую управление электрическим пылесосом;
Фиг.16 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом;
Фиг.17 изображает таблицу, показывающую управление электрическим пылесосом пятого варианта осуществления;
Фиг.18 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом;
Фиг.19 изображает таблицу, показывающую управление электрическим пылесосом шестого варианта осуществления;
Фиг.20 изображает блок-схему последовательности операций способа, иллюстрирующую управление электрическим пылесосом.
Описание предпочтительных вариантов осуществления изобретения
Электрический пылесос одного варианта осуществления имеет: основной корпус очистителя, вмещающий электрический нагнетатель воздуха; воздушный канал, сообщающийся со стороной всасывания электрического нагнетателя воздуха; средство детектирования количества пыли для детектирования количества пыли, проходящей через воздушный канал; блок ручного приведения в действие, выполненный с возможностью захвата и приведения в действие; средство детектирования приведения в действие для детектирования приведения в действие блока ручного приведения в действие; и средство управления, которое управляет приведением в действие электрического нагнетателя воздуха на основе количества пыли, детектируемого средством детектирования количества пыли, и приведения в действие блока ручного приведения в действие, детектируемого средством детектирования приведения в действие.
В дальнейшем в этом документе, конфигурация согласно первому варианту осуществления описывается со ссылкой на чертежи.
На фиг.3 показан так называемый электрический пылесос 11 с пылесборочным фильтром, и электрический пылесос 11 имеет основной корпус 12 очистителя и корпус 13, формирующий воздушный канал, который является частью трубки, отсоединяемой от основного корпуса 12 очистителя.
Основной корпус 12 очистителя включает в себя полый кожух 15 основного корпуса, выполненный с возможностью поворота и перемещения по поверхности, которая должна быть очищена, и кожух 15 основного корпуса секционируется на отделение для пылесбора основного корпуса и отделение для электрического нагнетателя воздуха (не показано) с передней стороны и задней стороны. Электрический нагнетатель 18 воздуха размещается в отделении для электрического нагнетателя воздуха, и сторона всасывания электрического нагнетателя 18 воздуха сообщается с отделением для пылесбора основного корпуса. В отделении для пылесбора основного корпуса размещается блок пылесбора, к примеру, фильтр, пылесборочный мешок или пылесобирающее устройство (пылесобирающая воронка). Всасывающее отверстие 19 основного корпуса, которое сообщается с отделением для пылесбора основного корпуса и с которым соединяется сторона основания корпуса 13, формирующего воздушный канал, открывается в передней части кожуха 15 основного корпуса.
Корпус 13, формирующий воздушный канал включает в себя удлиненый корпус 21 шланга, удлинительную трубку 22, отсоединяемую от корпуса 21 шланга, и напольную щетку 23 в качестве корпуса с всасывающим отверстием, отсоединяемую от удлинительной трубки 22, и воздушный канал W, сообщающийся со стороной всасывания электрического нагнетателя 18 воздуха, формируется в корпусе 13, формирующем воздушный канал. Кроме того, корпус 13, формирующий воздушный канал может быть использован, например, с отсоединенной напольной щеткой 23 или с отсоединенными напольной щеткой 23 и удлинительной трубкой 22.
Корпус 21 шланга в общем имеет: длинный цилиндрический основной корпус 25 шланга; блок 26 соединительной трубки, сформированный с возможностью сообщения со стороной основания (выпускной стороной), одной стороной, основного корпуса 25 шланга; и узел 27 ручного приведения в действие, который формируется с возможностью сообщения с верхней стороной (впускной стороной), другой торцевой стороной, основного корпуса 25 шланга и используется, например, для захвата и приведения в действие корпуса 13, формирующего воздушный канал.
Основной корпус 25 шланга выполнен в форме цилиндрических гофрированных трубок из гибкой синтетической смолы и т.д., и проводка (не показана) для электрического подключения стороны узла 27 ручного приведения в действие к стороне основного корпуса 12 очистителя предоставлена в основном корпусе 25 шланга и спирально за пределами воздушного канала W.
Узел 26 соединительной трубки является частью, которая должна вставляться и подсоединяться к всасывающему отверстию 19 основного корпуса и цилиндрически формироваться из синтетической смолы и т.д., и является тяжелее основного корпуса 25 шланга. Контактные выводы (не показаны), электрически подключенные к проводам, размещаемым в основном корпусе 25 шланга, размещаются в узле 26 соединительной трубки и электрически подключаются к стороне основного корпуса 12 очистителя посредством вставки и подсоединения корпуса соединительной трубки во всасывающее отверстие 19 основного корпуса. Как показано на фиг.2, фотодетектор 33 в качестве средства детектирования количества пыли для детектирования количества пыли, проходящей через воздушный канал W, размещается во всасывающем отверстии 19 основного корпуса, с которым блок 26 соединительной трубки соединяется.
Как показано на фиг.1 и 2, фотодетектор 33 включает в себя светоизлучающий узел 35 в качестве светоизлучающего средства для испускания, например, инфракрасного света и светоприемный узел 36 в качестве светоприемного средства для приема инфракрасного света, испускаемого из светоизлучающего узла 35, причем светоизлучающий узел 35 и светоприемный узел 36 размещаются напротив друг друга. Сигнал, соответствующий количеству пыли, проходящей через внутреннюю часть воздушного канала W, может выводиться в средство 37 управления на основе количества инфракрасного света, принятого посредством светоприемного узла 36 из светоизлучающего узла 35.
Светоизлучающий узел 35 имеет светоизлучающий элемент 35a, к примеру, светодиодный инфракрасный свет и т.п. и одну линзу 35b на светоизлучающей стороне и другую линзу 35c на светоизлучающей стороне в качестве световодных элементов на светоизлучающей стороне для направления света, излучаемого из светоизлучающего элемента 35a в воздушный канал W.
Светоизлучающий элемент 35a, например, размещается ниже на верхней части всасывающего отверстия 19 основного корпуса 12 очистителя, чтобы испускать инфракрасный свет вниз. Дополнительно, сторона анода светоизлучающего элемента 35a электрически подключается к узлу 38 подачи питания через резистор R1, к примеру, переменный резистор, и его сторона катода заземляется.
Одна линза 35b на светоизлучающей стороне размещается, под (выходной стороной инфракрасного света) светоизлучающим элементом 35a, на внутренней поверхности всасывающего отверстия 19 основного корпуса.
Другая линза 35c на светоизлучающей стороне размещается напротив нижней части светоизлучающего элемента 35a (линзы 35b на светоизлучающей стороне), при этом узел 26 соединительной трубки корпуса 13, формирующего воздушный канал соединен с всасывающим отверстием 19 основного корпуса. Другая линза 35c на светоизлучающей стороне входит в участок 35d прорези на светоизлучающей стороне, которая радиально высверлена в узле 26 соединительной трубки, так что она герметично закрывает участок 35d прорези на светоизлучающей стороне. Одна сторона линзы 35c на светоизлучающей стороне располагается напротив стороны светоизлучающего элемента 35a (стороны линзы 35b на светоизлучающей стороне), а другая ее сторона располагается напротив внутренней части воздушного канала W. Таким образом, не допускается выпускание воздуха в воздушном канале W из участка 35d прорези на светоизлучающей стороне за пределы воздушного канала W.
Аналогично, светоприемный узел 36 имеет светоприемный элемент 36a, к примеру, фототранзистор для детектирования инфракрасного света, испускаемого из светоизлучающего узла 35 и одну линзу 36b на светоприемной стороне и другую линзу 36c на светоприемной стороне в качестве световодных элементов на светоприемной стороне для направления света, излучаемого из светоизлучающего блока 35, в светоприемный элемент 36a.
Светоприемный элемент 36a, например, размещается выше, к стороне светоизлучающего элемента 35a, на нижней части всасывающего отверстия 19 основного корпуса для основного корпуса 12 очистителя, чтобы принимать инфракрасный свет, испускаемый из светоизлучающего элемента 35a. Светоприемный элемент 36a составляет так называемую заземляющую схему эмиттера, в которой сторона коллектора светоприемного элемента 36a электрически подключается к резистору R2, подключенному, параллельно с резистором R1, к узлу 38 подачи питания, и его сторона эмиттера заземляется. Точка контакта резистора R2 и стороны коллектора, причем точка является выходным узлом светоприемного элемента 36a, электрически подключается к усилителю 39, состоящему из OP-усилителя и т.д., и средству 37 управления соответственно.
Одна линза 36b на светоприемной стороне размещается, выше (входной стороны инфракрасного света) светоприемного элемента 36a, на внутренней поверхности всасывающего отверстия 19 основного корпуса.
Другая линза 36c на светоприемной стороне размещается напротив верхней части светоприемного элемента 36a (линзы 36b на светоприемной стороне), при этом узел 26 соединительной трубки корпуса 13, формирующего воздушный канал соединен с всасывающим отверстием 19 основного корпуса. Другая линза 36c на светоприемной стороне входит в участок 36d прорези на светоприемной стороне, которая радиально высверлена в узле 26 соединительной трубки, так что она герметично закрывает участок 36d прорези на светоприемной стороне. Одна торцевая сторона линзы 36c на светоприемной стороне располагается напротив стороны светоприемного элемента 36a (стороны линзы 36b на светоприемной стороне), а другой ее конец располагается напротив внутренней части воздушного канала W. Таким образом, не допускается выпускание воздуха в воздушном канале W из участка 36d прорези на светоприемной стороне за пределы воздушного канала W.
Средство 37 управления управляет по фазе приведением в действие электрического нагнетателя 18 воздуха, например, через симистор Tr1 в качестве элемента управления электрического нагнетателя воздуха и размещается, например, в проходе отработанного воздуха электрического нагнетателя 18 воздуха. Мощность подается в средство 37 управления из сети e общего пользования переменного тока, например, через шнур питания (не показан).
Блок 38 подачи питания является источником постоянного напряжения для генерирования напряжения, которое подается из сети общего пользования переменного тока, в предварительно детектированное неизменяющееся постоянное напряжение, например напряжение 5 В, когда шнур питания электрически подключается к сети e общего пользования переменного тока, т.е. когда источник питания (напряжение) включен (прикладывается), другими словами, включение в розетку завершено.
Усилитель 39 электрически подключается к средству 37 управления через формирователь 40 импульсов.
Как показано на фиг.3, узел 27 ручного приведения в действие практически цилиндрически формируется из синтетической смолы и т.д., и является тяжелее основного корпуса 25 шланга, и узел 41 для захвата, который должен захватываться пользователем, формируется так, что он выступает из впускной стороны к выпускной стороне. Множество задающих кнопок 42 в качестве средства задания для задания работы электрического нагнетателя 18 воздуха и т.д., в средстве 37 управления (фиг.1) и т.д., размещаются в узле 41 для захвата. Эти задающие кнопки 42 электрически подключаются к средству 37 управления (фиг.1) и т.д. в основном корпусе 12 очистителя через провода в основном корпусе 25 шланга. Средство 45 детектирования приведения в действие для детектирования приведения в действие узлом 27 ручного приведения в действие дополнительно размещается в узле 41 для захвата. Средство 45 детектирования приведения в действие является известным средством, к примеру датчиком наклона, и может детектировать то, работает или нет (неподвижен) узел 27 ручного приведения в действие, другими словами, управляет (использует) или нет пользователь узлом 27 ручного приведения в действие. Как показано на фиг.1, средство 45 детектирования приведения в действие электрически подключается к средству 37 управления.
Напольная щетка 23, показанная на фиг.3, может составлять часть (впускной конец) воздушного канала W и включает в себя соединительную трубку 47, имеющую одну сторону, соединенную с возможностью сообщения с верхней стороной (впускной стороной) удлинительной трубки 22, и продолговатый корпус 48 насадки, соединенный вертикально или с возможностью поворота по окружности к другой стороне соединительной трубки 47, и напольная щетка 23 может двигаться по поверхности, которая должна быть очищена. Всасывающее отверстие, сообщающееся с другой стороной соединительной трубки 47, формируется на нижней части, напротив поверхности пола, корпуса 48 насадки.
Управление согласно первому варианту осуществления описывается в отношении таблицы, показанной на фиг.4, а также блок-схемы последовательности операций способа, проиллюстрированной на фиг.5.
Когда пользователь подключает (включает) шнур питания в розетку на поверхности стены, при этом блок пылесбора установлен в основном корпусе 12 очистителя, мощность (напряжение) подается (прикладывается) из сети e переменного тока общего пользования в средство 37 управления, узел 38 подачи питания и т.д.
Средство 37 управления ожидает функционального ввода задающих кнопок 42 и затем приводит в действие электрический нагнетатель 18 воздуха или прекращает приведение в действие электрического нагнетателя 18 воздуха в соответствии с рабочим режимом, заданным посредством пользовательской операции с задающими кнопками 42. В дальнейшем в этом документе описывается работа каждого узла в случае, если электрический нагнетатель 18 воздуха приводится в действие в автоматическом режиме, режиме, в котором средство 37 управления автоматически управляет вводом.
Пользователь, после того как электрический нагнетатель 18 воздуха приводится в действие, принудительно перемещает напольную щетку 23 вперед и назад по поверхности, которая должна быть очищена, через узел 41 для захвата, и очищает пылесосом пыль, которая находится на поверхности, которая должна быть очищена, вместе с воздухом через воздушный канал W посредством отрицательного давления приведенного в действие электрического нагнетателя 18 воздуха, и очищенная пылесосом пыль захватывается в узле пылесбора.
В этом состоянии очистки, средство 37 управления отслеживает количество пыли, проходящей через внутреннюю часть воздушного канала W, посредством, например, входного сигнала, который вводится после выходного сигнала, выводимого из фотодетектора 33, усиливается посредством усилителя 39 и подвергается формированию импульсов посредством формирователя 40 импульсов. Другими словами, электрический пылесос 11 детектирует количество пыли посредством фотодетектора 33 (этап 1).
Таким образом, когда пыль проходит через внутреннюю часть воздушного канала W, она блокирует свет, излучаемый из светоизлучающего элемента 35a светоизлучающего узла 35, причем количество света, принятого посредством светоприемного элемента 36a светоприемного узла 36, уменьшается, и тем самым фотодетектор 33 может детектировать то, что пыль проходит через внутреннюю часть воздушного канала W. Поскольку меньшее количество света принимается посредством светоприемного элемента 36a светоприемного узла 36 по мере того, как большее количество пыли проходит через внутреннюю часть воздушного канала W, становится относительно небольшим входной сигнал, который вводится в средство 37 управления после того, как выходной сигнал, выводимый из фотодетектора 33, усиливается посредством усилителя 39 и подвергается формированию импульсов посредством формирователя 40 импульсов. Таким образом, средство 37 управления может детектировать посредством абсолютной величины входного сигнала, проходит большое или небольшое количество пыли через внутреннюю часть воздушного канала W (в позиции поверхности, которая должна быть очищена, при очистке).
Средство 37 управления, например, сравнивает входной сигнал с предварительно установленным пороговым значением и определяет то, меньше или нет количество пыли, детектируемое посредством фотодетектора 33, предварительно детектированного количества, которое задано заранее (этап 2). Когда средство 37 управления определяет то, что количество пыли не больше (меньше) предварительно детектированного количества, оно определяет через средство 45 детектирования приведения в действие то, работает или нет узел 27 ручного приведения в действие (этап 3).
Когда средство 37 управления, на этапе 3, определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления оценивает, например, состояние, в котором пользователь не захватывает узел 27 ручного приведения в действие, и обычная очистка не выполняется, например, состояние очистки, в котором корпус 13 формирования воздушного канала остается с приведенным в действие электрическим пылесосом 11 (электрическим нагнетателем 18 воздуха) и т.д., и затем средство 37 управления задает фазовый угол ввода электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным предварительно определенному первому значению для электрического нагнетателя воздуха, которое является предварительно определенным минимальным значением, чтобы управлять электрическим нагнетателем 18 воздуха с предварительно определенным первым входным сигналом (мощностью 1) электрического нагнетателя воздуха, который является минимальным входным сигналом (этап 4).
Дополнительно, когда средство 37 управления, на этапе 3, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие не является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором небольшое количество пыли присутствует на поверхности, которая должна быть очищена, хотя пользователь возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным предварительно детектированному второму значению для электрического нагнетателя воздуха, превышающему первое значение для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с предварительно детектированным вторым входным сигналом (мощностью 2) электрического нагнетателя воздуха, превышающим первый входной сигнал электрического нагнетателя воздуха (этап 5).
С другой стороны, когда средство 37 управления, на этапе 2, определяет то, что количество пыли, детектируемое посредством фотодетектора 33, не меньше предварительно детектированного количества, средство 37 управления определяет через средство 45 детектирования приведения в действие, работает или нет узел 27 ручного приведения в действие (этап 6).
Когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором основание стены и т.п., в которой частично накапливается пыль, очищается и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным предварительно определенному третьему значению для электрического нагнетателя воздуха, превышающему второе значение для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с предварительно определенным третьим входным сигналом (мощностью 3) электрического нагнетателя воздуха, превышающим второй входной сигнал электрического нагнетателя воздуха (этап 7).
Дополнительно, когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие не является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом, и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным предварительно определенному четвертому значению для электрического нагнетателя воздуха, превышающему третье значение для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с предварительно детектированным четвертым вводом (подводимой мощностью) (мощностью 4) электрического нагнетателя воздуха, превышающим третий входной сигнал электрического нагнетателя воздуха (этап 8).
Таким образом, поскольку средство 37 управления оценивает состояние очистки на основе количества пыли, детектируемого посредством фотодетектора 33, и рабочего режима узла 27 ручного приведения в действие, детектируемого посредством средства 45 детектирования приведения в действие, и управляет приведением в действие (вводом) электрического нагнетателя 18 воздуха в соответствии с оцененным состоянием очистки, состояние очистки пользователем может быть точно оценено на основе двух видов информации, информации из фотодетектора 33 и информации из средства 45 детектирования приведения в действие, и очистка может выполняться с мощностью, подходящей для состояния очистки.
Затем, второй вариант осуществления описывается со ссылкой на фиг.6-9. Кроме того, идентичные символы, относящиеся к конфигурациям, а также управлению и эффекту, идентичным конфигурациям, управлению и эффекту первого варианта осуществления, и их описание опускаются.
Во втором варианте осуществления, напольная щетка 23 первого варианта осуществления включает в себя вращающуюся щетку 51 в качестве вращающегося чистящего корпуса.
Таким образом, как показано на фиг.7, в напольной щетке 23 вращающаяся щетка 51 присоединена с возможностью вращения к продолговатому всасывающему отверстию, открытому на нижней поверхности напротив поверхности, которая должна быть очищена, корпуса 48 насадки. Вращающаяся щетка 51 соединяется, через средство передачи 53, к примеру ремень, с приводом 52, размещенным в корпусе 48 насадки, и вращательно приводится в действие посредством привода 52.
Вращающаяся щетка 51 вращается, чтобы счищать пыль, которая попадает или прилипает к поверхности, которая должна быть очищена. Хотя вращающаяся щетка 51 может произвольно конфигурироваться, она предпочтительно включает в себя чистящий элемент, такой как щетка с щетиной или пластина.
Как показано на фиг.6, привод 52 управляется по фазе посредством средства 37 управления через симистор Tr2 в качестве элемента управления приводом. Привод 52 включается/отключается во время включения/отключения (в соответствии с включением/отключением) электрического пылесоса 11 (электрического нагнетателя 18 воздуха). Кроме того, средство 37 управления и привод 52 (симистор Tr2) электрически подключаются друг другу посредством проводов (не показаны), проходящих через внутреннюю часть корпуса 13 формирования воздушного канала.
Затем, управление согласно второму варианту осуществления описывается в отношении таблицы, показанной на фиг.8, а также блок-схемы последовательности операций способа, проиллюстрированной на фиг.9.
Когда средство 37 управления, на этапе 3 первого варианта осуществления, определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором пользователь не захватывает блок 27 ручного приведения в действие, и обычная очистка не выполняется, например, корпус 13 формирования воздушного канала остается с приведенным в действие электрическим пылесосом 11 (электрическим нагнетателем 18 воздуха) и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным первому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с первым входным сигналом (мощностью 1) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным предварительно определенному первому значению для привода, которое является предварительно определенным минимальным значением, чтобы управлять приводом 52 с предварительно определенным первым входным сигналом привода, который является минимальным входным сигналом, и тем самым вращает вращающуюся щетку 51 на предварительно определенной первой частоте вращения (частоте вращения 1), которая является наименьшей частотой вращения (этап 11).
Дополнительно, когда средство 37 управления, на этапе 3, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие не является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором небольшое количество пыли присутствует на поверхности, которая должна быть очищена, хотя пользователь возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым вводом (мощностью 2) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным предварительно определенному второму значению для привода, превышающему первое значение для привода, чтобы управлять приводом 52 с предварительно определенным вторым вводом привода, превышающим первый входной сигнал привода, и тем самым вращает вращающуюся щетку 51 на предварительно определенной второй частоте вращения (частоте вращения 2), превышающей первую частоту вращения (этап 12).
Дополнительно, когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором место между ковром и стеной, в котором большое количество пыли частично накапливается, очищается и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с третьим входным сигналом (мощностью 3) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным предварительно определенному третьему значению для привода, превышающему второе значение для привода, чтобы управлять приводом 52 с предварительно определенным третьим входным сигналом привода, превышающим второй входной сигнал привода, и тем самым вращает вращающуюся щетку 51 на предварительно определенной третьей частоте вращения (частоте вращения 3), превышающей вторую частоту вращения (этап 13).
Дополнительно, когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие не является неподвижным), средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала входного сигнала 52, который должен задаваться посредством симистора Tr2, равным предварительно детектированному четвертому значению для привода, превышающему третье значение для привода, чтобы управлять приводом 52 с предварительно детектированным четвертым входным сигналом привода, превышающим третий входной сигнал привода, и тем самым вращает вращающуюся щетку 51 на предварительно определенной четвертой частоте вращения (частоте вращения 4), превышающей третью частоту вращения (этап 14).
Поскольку средство 37 управления тем самым оценивает состояние очистки на основе количества пыли, детектируемого посредством фотодетектора 33, и управления блоком 27 ручного приведения в действие, детектируемого посредством средства 45 детектирования приведения в действие, и, соответственно, управляет приведением в действие электрического нагнетателя 18 воздуха и привода 52 (вращающейся щетки 51) в соответствии с оцененным состоянием очистки, не только электрический нагнетатель 18 воздуха, но и привод 52 (вращающаяся щетка 51) также может приводиться в действие в состоянии, подходящем для состояния очистки, очистка может выполняться с мощностью, подходящей для состояния очистки, энергосбережение может быть реализовано, пыль на поверхности, которая должна быть очищена, может счищаться посредством привода 52 (вращающейся щетки 51), и тем самым эффективность очистки дополнительно может повышаться.
Затем, третий вариант осуществления описывается со ссылкой на фиг.10-13. Кроме того, идентичные символы присоединены к конфигурациям, а также управлению и эффекту, идентичным конфигурациям, управлению и эффекту каждого из вышеописанных вариантов осуществления, и их описание опускается.
В третьем варианте осуществления, средство 55 детектирования помещения на пол для детектирования состояния помещения на пол напольной щетки 23 размещается в напольной щетке 23 первого варианта осуществления.
Как показано на фиг.11, средство 55 детектирования помещения на пол с возможностью перемещения присоединено к отверстию 56, сформированному на нижней поверхности напротив поверхности, которая должна быть очищена, корпуса 48 насадки. Средство 55 детектирования помещения на пол имеет колесо 57 в качестве расположенного на полу узла и переключатель (не показан), который может переключать включение/отключение посредством помещения на пол/поднятие с пола колеса 57, колесо 57 шарнирно поддерживается так, что оно поворачивается на опорном элементе 59, и опорный элемент 59 шарнирно поддерживается так, что он поворачивается на корпусе 48 насадки. Когда напольная щетка 23 приводится в соприкосновение (помещается на) с поверхностью, которая должна быть очищена, колесо 57 входит в контакт с поверхностью, которая должна быть очищена, поворачивается и размещается в отверстии 56 вместе с опорным элементом 59, переключатель включается посредством повернутого опорного элемента 59, и тем самым определяется соприкосновение с полом напольной щетки 23. Когда напольная щетка 23 поднимается с поверхности, которая должна быть очищена (состояние поднятия с пола), колесо 57 выступает из отверстия 56 вместе с опорным элементом 59, опорный элемент 59 отходит от переключателя, переключатель выключается, и тем самым определяется поднятие с пола напольной щетки 23.
Как показано на фиг.10, средство 55 детектирования помещения на пол электрически подключается к средству 37 управления, и средство 37 управления может распознавать помещение на пол/поднятие с пола напольной щетки 23 через включение/выключение переключателя средства 55 детектирования помещения на пол. Кроме того, средство 55 детектирования помещения на пол и средство 37 управления электрически подключаются друг к другу посредством проводов (не показаны), проходящих через внутреннюю часть корпуса 13 формирования воздушного канала. Соответственно, в случае, если напольная щетка 23 отсоединяется от удлинительной трубки 22 или удлинительной трубки 22, напольная щетка 23 отсоединяется от узла 27 ручного приведения в действие и другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, подсоединяется к узлу 27 ручного приведения в действие, средство 55 детектирования помещения на пол и средство 37 управления электрически отсоединяются друг от друга, и средству 37 управления инструктируется определять, что напольная щетка 23 не помещена на пол. Таким образом, средство 55 детектирования помещения на пол выступает в качестве средства детектирования подсоединения, которое косвенно определяет посредством детектирования помещения на пол/поднятие с пола напольной щетки 23, используется ли напольная щетка 23 или другой корпус с всасывающим отверстием вместо отсоединенной напольной щетки 23. Таким образом, в дальнейшем в этом документе, приводится описание при условии, что помещение на пол/поднятие с пола, которое средство 37 управления детектирует через средство 55 детектирования помещения на пол, содержит подсоединение/отсутствие подсоединения напольной щетки 23.
Затем, управление согласно третьему варианту осуществления описывается в отношении таблицы, показанной на фиг.12, а также блок-схемы последовательности операций способа, проиллюстрированной на фиг.13.
Когда средство 37 управления, на этапе 3, сначала определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления детектирует через средство 55 детектирования помещения на пол, помещена или нет напольная щетка 23 на пол (этап 21).
Когда средство 37 управления, на этапе 21, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние, в котором небольшое количество пыли присутствует на поверхности, которая должна быть очищена, пользователь подсоединяет другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22), и не захватывает узел 27 ручного приведения в действие, и обычная очистка не выполняется, например, состояние очистки, в котором корпус 13 формирования воздушного канала остается с приведенным в действие электрическим пылесосом 11 (электрическим нагнетателем 18 воздуха) и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным первому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с первым входным сигналом (мощностью 1) электрического нагнетателя воздуха (этап 22).
Когда средство 37 управления, на этапе 21, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором, хотя небольшое количество пыли присутствует на поверхности, которая должна быть очищена, напольная щетка 23 помещается на поверхности, которая должна быть очищена, чтобы очищать пыль, которая частично накапливается в основании стены и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым входным сигналом (мощностью 2) электрического нагнетателя воздуха (этап 23).
Дополнительно, когда средство 37 управления, на этапе 3, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие не является неподвижным), средство 37 управления определяет, аналогично этапу 21, через средство 55 детектирования помещения на пол то, помещена или нет напольная щетка 23 на пол (этап 24).
Когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором, хотя небольшое количество пыли присутствует на поверхности, которая должна быть очищена, другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, подсоединяется вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22), и очистка выполняется и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым входным сигналом (мощностью 2) электрического нагнетателя воздуха (этап 25).
Дополнительно, когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором, хотя небольшое количество пыли присутствует на поверхности, которая должна быть очищена, напольная щетка 23 помещается на поверхности, которая должна быть очищена, и очистка выполняется и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с третьим входным сигналом (мощностью 3) электрического нагнетателя воздуха (этап 26).
С другой стороны, когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие не работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления определяет, аналогично этапам 21 и 24, через средство 55 детектирования помещения на пол то, помещена или нет напольная щетка 23 на пол (этап 27).
Когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, подсоединенный вместо отсоединенной напольной щетки 23 и т.п., принудительно остается неподвижным в течение предварительно определенного периода времени, чтобы очищать пылесосом, с помощью объема всасываемого воздуха, пыль, накапливаемую в узком месте, таком как зазор между предметом мебели и стеной и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с третьим входным сигналом (мощностью 3) электрического нагнетателя воздуха (этап 28).
Дополнительно, когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором угол поверхности, которая должна быть очищена, основание стены и т.п. очищается с помощью напольной щетки 23 и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым вводом (мощностью 4) электрического нагнетателя воздуха (этап 29).
Когда средство 37 управления, на этапе 6, определяет то, что узел 27 ручного приведения в действие работает (узел 27 ручного приведения в действие является неподвижным), средство 37 управления определяет, аналогично этапам 21, 24 и 27, через средство 55 детектирования помещения на пол то, помещена или нет напольная щетка 23 на пол (этап 30).
Когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором широкая поверхность, которая должна быть очищена, к примеру верхняя поверхность полки, на которой накапливается большое количество пыли, очищается посредством использования другого корпуса с всасывающим отверстием, к примеру щетки для мебели, вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22) и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха (этап 31).
Дополнительно, когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь помещает напольную щетку 23 на поверхности и возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным пятому значению для электрического нагнетателя воздуха, которое превышает четвертое значение для электрического нагнетателя воздуха и является максимальным значением, чтобы управлять электрическим нагнетателем 18 воздуха с предварительно определенным пятым входным сигналом (мощностью 5) электрического нагнетателя воздуха, который превышает четвертый входной сигнал электрического нагнетателя воздуха и является максимальным входным сигналом (этап 32).
Поскольку средство 37 управления тем самым оценивает состояние очистки на основе количества пыли, детектируемого посредством фотодетектора 33, управления узлом 27 ручного приведения в действие, детектируемого посредством средства 45 детектирования приведения в действие, и состояния помещения на пол (состояния подсоединения), детектируемого посредством средства 55 детектирования помещения на пол, напольной щетки 23 или корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, и управляет приведением в действие электрического нагнетателя 18 воздуха в соответствии с оцененным состоянием очистки, состояние очистки пользователем может быть более точно оценено на основе трех видов информации: информации из фотодетектора 33, информации из средства 45 детектирования приведения в действие и информации из средства 55 детектирования помещения на пол, очистка может выполняться с мощностью, более подходящей для состояния очистки, и это может дополнительно способствовать энергосбережению. Таким образом, поскольку входной сигнал (мощность (всасывающая сила)) электрического нагнетателя 18 воздуха, когда, например, напольная щетка 23 помещена на пол (подсоединена), превышает входной сигнал (мощность), когда напольная щетка 23 не помещена на пол (не подсоединена), средство 37 управления может отличать, например, случай, в котором поверхность, которая должна быть очищена, к примеру поверхность пола, очищается с помощью напольной щетки 23, требующей большой мощности электрического нагнетателя 18 воздуха, от случая, в котором очистка выполняется с помощью корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, имеющего меньшую площадь отверстия, требующего мощности, меньшей мощности напольной щетки 23, и дополнительно может надлежащим образом задавать входной сигнал электрического нагнетателя 18 воздуха.
Кроме того, хотя напольная щетка 23 первого варианта осуществления или третьего варианта осуществления может включать в себя вращающуюся щетку 51 и привод 52 второго варианта осуществления, предполагается, что привод 52 (вращающаяся щетка 51) управляется независимо от электрического нагнетателя 18 воздуха.
Затем, четвертый вариант осуществления описывается со ссылкой на фиг.14-16. Кроме того, идентичные символы присоединены к конфигурациям, а также управлению и эффекту, идентичным конфигурациям, управлению и эффекту каждого из вышеописанных вариантов осуществления, и их описание опускается.
Как показано на фиг.14, в четвертом варианте осуществления, средство 55 детектирования помещения на пол третьего варианта осуществления предоставляется во втором варианте осуществления.
При описании четвертого варианта осуществления в отношении таблицы, показанной на фиг.15, и блок-схемы последовательности операций способа, проиллюстрированной на фиг.16, когда средство 37 управления, на этапе 21, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором небольшое количество пыли присутствует на поверхности, которая должна быть очищена, и корпус 13 формирования воздушного канала остается в состоянии, в котором пользователь поднимает напольную щетку 23 относительно поверхности, которая должна быть очищена, и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным первому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с первым входным сигналом (мощностью 1) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 41).
Дополнительно, когда средство 37 управления, на этапе 21, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором напольная щетка 23 помещается на поверхности, которая должна быть очищена, прижимается к основанию стены и т.п., в которой небольшое количество пыли накапливается, и принудительно остается неподвижной и т.д., и затем средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым вводом (мощностью 2) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным второму значению для привода, чтобы управлять приводом 52 со вторым вводом привода, и тем самым вращает вращающуюся щетку 51 на второй частоте вращения (частоте вращения 2) (этап 42).
Аналогично, когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором, хотя небольшое количество пыли присутствует на поверхности, которая должна быть очищена, поверхность очищается посредством использования другого корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22) и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым входным сигналом (мощностью 2) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 43).
Дополнительно, когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором, хотя небольшое количество пыли присутствует на поверхности, которая должна быть очищена, напольная щетка 23 помещается на поверхности, и поверхность, которая должна быть очищена, очищается и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с третьим вводом (мощностью 3) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным третьему значению для привода, чтобы управлять приводом 52 с третьим входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на третьей частоте вращения (частоте вращения 3) (этап 44).
Когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, подсоединенный вместо отсоединенной напольной щетки 23, принудительно остается неподвижным в течение предварительно детектированного периода времени, чтобы очищать, с помощью объема всасываемого воздуха, пыль, накапливаемую в узком месте, таком как зазор между предметом мебели и стеной и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, управляет электрическим нагнетателем 18 воздуха с третьим вводом (мощностью 3) электрического нагнетателя воздуха и останавливает привод 52, т.е. вращающуюся щетку 51, посредством задания фазового угла входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю (этап 45).
Дополнительно, когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором угол поверхности, которая должна быть очищена, основание стены и т.п. должны быть очищены с помощью напольной щетки 23 и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным четвертому значению для привода, чтобы управлять приводом 52 с четвертым входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на четвертой частоте вращения (частоте вращения 4) (этап 46).
Когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором широкая поверхность, которая должна быть очищена, к примеру верхняя поверхность полки, на которой накапливается большое количество пыли, очищается посредством использования другого корпуса с всасывающим отверстием, к примеру щетки для мебели, вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22) и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 47).
Дополнительно, когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь помещает на пол напольную щетку 23 и возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным пятому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с пятым входным сигналом (мощностью 5) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным предварительно определенному пятому значению для привода, которое превышает четвертое значение для привода и является максимальным значением, чтобы управлять приводом 52 с предварительно детектированным пятым входным сигналом привода, который превышает четвертый входной сигнал привода и является максимальным входным сигналом, и тем самым вращает вращающуюся щетку 51 на предварительно определенной пятой частоте вращения (частоте вращения 5), которая превышает четвертую частоту вращения и является наибольшей частотой вращения (этап 48).
Поскольку средство 37 управления тем самым управляет приведением в действие электрического нагнетателя воздуха 18 и привода 52 (вращающейся щетки 51) в соответствии с количеством пыли, детектируемым посредством фотодетектора 33, управления узлом 27 ручного приведения в действие, детектируемого посредством средства 45 детектирования приведения в действие, и состояния помещения на пол (состояния подсоединения), детектируемого посредством средства 55 детектирования помещения на пол, напольной щетки 23 или корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, состояние очистки пользователем может быть более точно оценено, очистка может выполняться с мощностью, более подходящей для состояния очистки, и это может дополнительно способствовать энергосбережению. Таким образом, поскольку входной сигнал (мощность) электрического нагнетателя 18 воздуха, когда, например, напольная щетка 23 помещена на пол (подсоединена), задается превышающим входной сигнал (мощность) когда напольная щетка 23 не помещена на пол (не подсоединена), средство 37 управления может, например, отличать случай, в котором поверхность, которая должна быть очищена, к примеру поверхность пола, очищается с помощью напольной щетки 23, требующей большой мощности, от случая, в котором очистка выполняется с помощью корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, требующего мощности, меньшей мощности напольной щетки 23, и дополнительно может надлежащим образом задавать входной сигнал электрического нагнетателя 18 воздуха. Дополнительно, поскольку привод 52 (вращающаяся щетка 51) останавливается, когда средство 55 детектирования помещения на пол определяет поднятие с пола (отсутствие подсоединения) напольной щетки 23, необязательное потребление энергии может подавляться, и это может дополнительно способствовать энергосбережению.
Далее, пятый вариант осуществления описывается со ссылкой на фиг.17 и 18. Кроме того, идентичные символы присоединены к конфигурациям, а также управлению и эффекту, идентичным конфигурациям, управлению и эффекту каждого из вышеописанных вариантов осуществления, и их описание опускается.
Хотя пятый вариант осуществления в основном имеет конфигурации, идентичные конфигурациям четвертого варианта осуществления, они отличаются друг от друга с точки зрения управления посредством средства 37 управления.
В частности, что касается управления, в пятом варианте осуществления, каждый из следующих этапов 51-54 выполняется вместо каждого из этапов 45-48 четвертого варианта осуществления.
Таким образом, при описании пятого варианта осуществления в отношении таблицы, показанной на фиг.17, и блок-схемы последовательности операций способа, проиллюстрированной на фиг.18, когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором другой корпус с всасывающим отверстием, к примеру корпус с клювовидным отверстием, подсоединенный вместо отсоединенной напольной щетки 23, принудительно остается неподвижным в течение предварительно определенного периода времени, чтобы очищать пылесосом, с помощью объема всасываемого воздуха, пыль, накапливаемую в узком месте, таком как зазор между предметом мебели и стеной и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать двигатель 52, т.е. вращающуюся щетку 51 (этап 51).
Дополнительно, когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором напольная щетка 23 помещена на пол в месте, в котором большое количество пыли накапливается, таком как угол поверхности, которая должна быть очищена, основание стены и т.п., и очистка интенсивно выполняется и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным пятому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с пятым входным сигналом (мощностью 5) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным пятому значению для привода, чтобы управлять приводом 52 с пятым входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на пятой частоте вращения (частоте вращения 5) (этап 52).
Когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором широкая поверхность, которая должна быть очищена, к примеру верхняя поверхность полки, на которой накапливается большое количество пыли, очищается посредством использования другого корпуса с всасывающим отверстием, к примеру щетки для мебели, вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22) и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 3) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 53).
Дополнительно, когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь помещает на пол напольную щетку 23 и возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным четвертому значению для привода, чтобы управлять приводом 52 с четвертым входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на четвертой частоте вращения (частоте вращения 4) (этап 54).
Как описано выше, поскольку средство 37 управления в случае, если количество пыли, детектируемое посредством фотодетектора 33, не меньше предварительно детектированного количества, и средство 45 детектирования приведения в действие детектирует то, что блок 27 ручного приведения в действие не работает, оценивает, например, состояние очистки, в котором пользователь интенсивно очищает угол поверхности, которая должна быть очищена, основание стены и т.п. с использованием напольной щетки 23 или корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, и относительно увеличивает ввод электрического нагнетателя 18 воздуха, по меньшей мере, в частности, приводит в действие электрический нагнетатель 18 воздуха с максимальным входным сигналом, предварительно установленным в соответствии с типом электрического пылесоса 11, пыль может быть эффективно очищена в соответствии с состоянием очистки пользователем, и легкость управления повышается.
Поскольку средство 37 управления в случае, если количество пыли, детектируемое посредством фотодетектора 33, не меньше предварительно детектированного количества, средство 45 детектирования приведения в действие определяет то, что блок 27 ручного приведения в действие не работает, и средство 55 детектирования помещения на пол детектирует соприкосновение с полом напольной щетки 23, оценивает, например, состояние очистки, в котором пользователь помещает на пол напольную щетку 23 и интенсивно очищает угол поверхности, которая должна быть очищена, основание стены и т.п., и относительно увеличивает входные сигналы электрического 18 нагнетателя воздуха и привода 52, в частности, соответственно, приводит в действие электрический нагнетатель 18 воздуха и привод 52 с максимальными входными сигналами, предварительно установленными в соответствии с типом электрического пылесоса 11 и т.д., пыль может быть эффективно очищена в соответствии с состоянием очистки пользователем, и легкость управления дополнительно повышается.
Таким образом, поскольку, хотя существует возможность того, что, в случае если только средство 45 детектирования приведения в действие предоставляется, средство 37 управления уменьшает входной сигнал, когда средство 45 детектирования приведения в действие детектирует то, что блок 27 ручного приведения в действие не работает, как фотодетектор 33, так и средство 45 детектирования приведения в действие предоставляются в этом варианте осуществления, средство 37 управления может охватывать даже вышеописанное состояние очистки, в котором пользователь интенсивно очищает угол поверхности, которая должна быть очищена, основание стены и т.п. с использованием напольной щетки 23 или корпуса с всасывающим отверстием, к примеру, корпуса с клювовидным отверстием. Соответственно, электрический нагнетатель 18 воздуха и/или привод 52 (вращающаяся щетка 51) может приводиться в действие с мощностью, более подходящей для состояния очистки, и очистка может надежно выполняться. Другими словами, поскольку предоставляются как фотодетектор 33, так и средство 45 детектирования приведения в действие, состояние очистки дополнительно может детектироваться, и очистка может эффективно выполняться.
Затем, шестой вариант осуществления описывается со ссылкой на фиг.19 и 20. Кроме того, идентичные символы относящиеся к конфигурациям, а также управлению и эффекту, идентичным конфигурациям, управлению и эффекту каждого из вышеописанных вариантов осуществления, и их описание опускается.
Хотя шестой вариант осуществления в основном имеет конфигурации, идентичные конфигурациям четвертого варианта осуществления, они отличаются друг от друга с точки зрения управления посредством средства 37 управления.
В частности, что касается управления, в шестом варианте осуществления, каждый из следующих этапов 61-66 выполняется вместо каждого из этапов 43-48 четвертого варианта осуществления.
Таким образом, при описании шестого варианта осуществления в отношении таблицы, показанной на фиг.19, и блок-схемы последовательности операций способа, проиллюстрированной на фиг.20, когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором существенная мощность требуется, хотя количество пыли является относительно небольшим, в таком случае, когда глубокая сторона поверхности, которая должна быть очищена, такая как оконная рама, покрывается пылью и сторона очищается с помощью другого корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, подсоединенного вместо отсоединенной напольной щетки 23 и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 61).
Дополнительно, когда средство 37 управления, на этапе 24, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором пыль, к примеру пух, прилипающий к поверхности, которая должны быть очищены, к примеру к ковру, должен быть очищен посредством перемещения напольной щетки 23 постепенно и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным пятому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с пятым входным сигналом (мощностью 5) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным пятому значению для привода, чтобы управлять приводом 52 с пятым входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на пятой частоте вращения (частоте вращения 5) (этап 62).
Когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором другой корпус с всасывающим отверстием, к примеру, корпус с клювовидным отверстием, подсоединенный вместо отсоединенной напольной щетки 23, принудительно остается неподвижным в течение предварительно определенного периода времени, чтобы очищать пылесосом, с помощью объема всасываемого воздуха, пыль, накапливаемую в узком месте, таком как зазор между предметом мебели и стеной и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным второму значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха со вторым вводом (мощностью 2) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 63).
Дополнительно, когда средство 37 управления, на этапе 27, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором угол поверхности, которая должна быть очищена, основание стены и т.п. должно быть очищено с помощью напольной щетки 23 и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным третьему значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с третьим вводом (мощностью 3) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным третьему значению для привода, чтобы управлять приводом 52 с третьим входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на третьей частоте вращения (частоте вращения 3) (этап 64).
Когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 не помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором широкая поверхность, которая должна быть очищена, к примеру, верхняя поверхность полки, на которой накапливается большое количество пыли, очищается посредством использования другого корпуса с всасывающим отверстием, к примеру, щетки для мебели вместо отсоединенной напольной щетки 23 (и удлинительной трубки 22) и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 3) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным нулю, чтобы останавливать привод 52, т.е. вращающуюся щетку 51 (этап 65).
Дополнительно, когда средство 37 управления, на этапе 30, определяет то, что напольная щетка 23 помещена на пол, средство 37 управления оценивает, например, состояние очистки, в котором большое количество пыли присутствует на поверхности, которая должна быть очищена, и пользователь помещает на пол напольную щетку 23 и возвратно-поступательно перемещает напольную щетку 23 вперед и назад, чтобы очищать поверхность обычным способом и т.д., и средство 37 управления задает фазовый угол входного сигнала электрического нагнетателя 18 воздуха, который должен задаваться посредством симистора Tr1, равным четвертому значению для электрического нагнетателя воздуха, чтобы управлять электрическим нагнетателем 18 воздуха с четвертым входным сигналом (мощностью 4) электрического нагнетателя воздуха, и задает фазовый угол входного сигнала привода 52, который должен задаваться посредством симистора Tr2, равным четвертому значению для привода, чтобы управлять приводом 52 с четвертым входным сигналом привода, и тем самым вращает вращающуюся щетку 51 на четвертой частоте вращения (частоте вращения 4) (этап 66).
Как описано выше, поскольку средство 37 управления в случае, если количество пыли, детектируемое посредством фотодетектора 33, не превышает предварительно определенное количество, и средство 45 детектирования приведения в действие детектирует то, что блок 27 ручного приведения в действие работает, оценивает, например, состояние очистки, в котором пользователь очищает пыль, к примеру пух, который прилипает к поверхности, которая должна быть очищена, к примеру к ковру, и который трудно извлекать оттуда, с использованием напольной щетки 23 или корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием, и относительно увеличивает входной сигнал электрического нагнетателя 18 воздуха, по меньшей мере, в частности, приводит в действие электрический нагнетатель 18 воздуха посредством максимального входного сигнала, предварительно установленного в соответствии с типом электрического пылесоса 11 и т.д., пыль может быть эффективно очищена в соответствии с состоянием очистки пользователем, и легкость управления повышается.
Поскольку средство 37 управления в случае, если количество пыли, детектируемое посредством фотодетектора 33, не превышает предварительно детектированное количество, средство 45 детектирования приведения в действие детектирует то, что блок 27 ручного приведения в действие работает, и средство 55 детектирования помещения на пол детектирует соприкосновение с полом напольной щетки 23, оценивает, например, состояние очистки, в котором пользователь очищает пыль, к примеру пух, который прилипает к поверхности, которая должна быть очищена, к примеру к ковру, и который трудно извлекать оттуда, с использованием напольной щетки 23 и относительно увеличивает вводы электрического нагнетателя 18 воздуха и привода 52, в частности, соответственно, приводит в действие электрический нагнетатель 18 воздуха и привод 52 посредством максимальных вводов, предварительно установленных в соответствии с типом электрического пылесоса 11 и т.д., пыль может быть эффективно очищена в соответствии с состоянием очистки пользователем, и легкость управления дополнительно повышается.
Таким образом, в случае, если используется только фотодетектор 33, существует возможность того, что при очистке поверхности, которая должна быть очищена, к примеру ковра, к которому пух и т.д. прилипает, средство 37 управления определяет то, что количество пыли не меньше предварительно определенного количества, вследствие тонкодисперсной пыли, первоначально очищенной пылесосом, но затем средство 37 управления может ошибочно определять, что когда только пух остается на поверхности, которая должна быть очищена, количество пыли не превышает предварительно определенное количество, и уменьшает входной сигнал. Тем не менее, в этом варианте осуществления предоставляются как фотодетектор 33, так и средство 45 детектирования приведения в действие, и тем самым средство 37 управления может охватывать даже вышеописанное состояние очистки, в котором пользователь очищает пыль, к примеру пух, который прилипает к поверхности, которая должна быть очищена, к примеру к ковру, и который трудно извлекать оттуда, с использованием напольной щетки 23 или корпуса с всасывающим отверстием, к примеру корпуса с клювовидным отверстием. Соответственно, электрический нагнетатель 18 воздуха и/или привод 52 (вращающаяся щетка 51) может приводиться в действие с мощностью, более подходящей для состояния очистки, и очистка может надежно выполняться. Другими словами, поскольку используются как фотодетектор 33, так и средство 45 детектирования приведения в действие, состояние очистки дополнительно может определяться, и очистка может эффективно выполняться.
Кроме того, управление этапом 51 пятого варианта осуществления и управление этапом 61 шестого варианта осуществления являются, соответственно, применимыми к случаю, в котором не используется средство 55 детектирования помещения на пол или напольная щетка 23. Таким образом, чтобы увеличивать входной сигнал электрического нагнетателя 18 воздуха, по меньшей мере, управление этапом 51 пятого варианта осуществления может быть подставлено вместо управления этапом 7 первого варианта осуществления или управления этапом 13 второго варианта осуществления, либо управление этапом 61 шестого варианта осуществления может быть подставлено вместо управления этапом 5 первого варианта осуществления или управления этапом 12 второго варианта осуществления. Дополнительно, управление пятым вариантом осуществления и управление шестым вариантом осуществления могут быть комбинированы друг с другом.
Согласно, по меньшей мере, одному из вышеописанных вариантов осуществления, поскольку средство 37 управления, по меньшей мере, управляет приведением в действие электрического нагнетателя 18 воздуха на основе количества пыли, детектируемого посредством фотодетектора 33, и управления блоком 27 ручного приведения в действие, детектируемого посредством средства 45 детектирования приведения в действие, состояние очистки пользователем может быть точно оценено на основе, по меньшей мере, двух видов информации, информации из фотодетектора 33 и информации из средства 45 детектирования приведения в действие, очистка может выполняться с мощностью, подходящей для состояния очистки, и может быть реализовано энергосбережение.
Кроме того, хотя узел 27 ручного приведения в действие используется для захвата и управления корпусом 13 формирования воздушного канала в каждом из вышеописанных вариантов осуществления, он может использоваться для захвата и управления основным корпусом 12 очистителя в случае так называемого вертикального электрического пылесоса и т.п., в котором напольная щетка 23 подсоединяется к нижней части основного корпуса 12 очистителя.
Дополнительно, хотя каждый из вышеописанных вариантов осуществления описывается посредством упоминания общего входного сигнала в качестве примера, касающегося каждого входного сигнала электрического нагнетателя воздуха и каждого входного сигнала привода, входные сигналы электрического нагнетателя воздуха и входные сигналы привода вариантов осуществления могут, соответственно, задаваться по-разному посредством варианта осуществления до тех пор, пока взаимосвязи абсолютных величин сохраняются.
Хотя описаны конкретные варианты осуществления, эти варианты осуществления представлены только в качестве примера и не имеют намерения ограничивать объем изобретения. Фактически, новые варианты осуществления, описанные в данном документе, могут быть осуществлены во множестве других форм; кроме того, различные пропуски, подстановки и изменения в форме вариантов осуществления, описанных в данном документе, могут осуществляться без отступления от сущности изобретения. Прилагаемая формула изобретения и ее эквиваленты имеют намерение охватывать такие формы и модификации, как попадающие в рамки объема, и сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2454917C1 |
| ЭЛЕКТРОПЫЛЕСОС | 2012 |
|
RU2552763C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2484757C1 |
| СБОРКА ШЛАНГА ЭЛЕКТРИЧЕСКОГО ПЫЛЕСОСА И ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2462983C1 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС И СПОСОБ ЕГО РЕГУЛИРОВКИ | 2010 |
|
RU2497433C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2562046C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2012 |
|
RU2562043C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2009 |
|
RU2494667C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2433779C1 |
| ПЫЛЕСОС И ЕГО УЗЕЛ ШЛАНГА | 2011 |
|
RU2483666C2 |


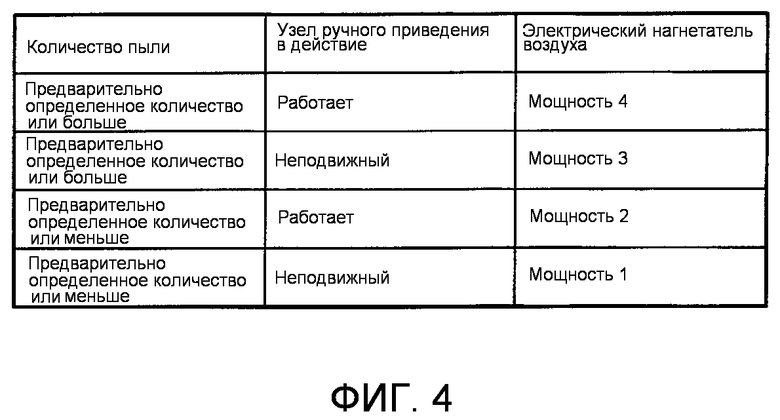


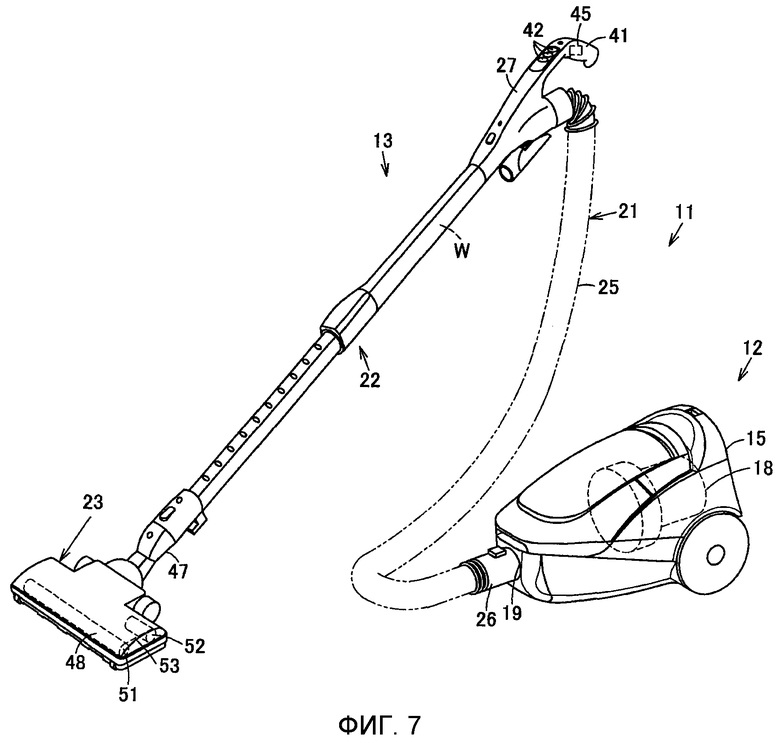
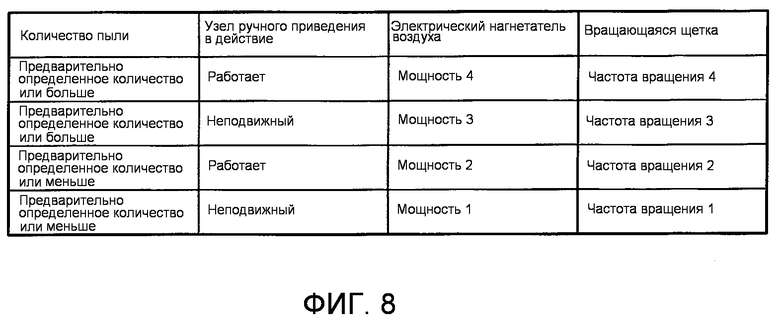
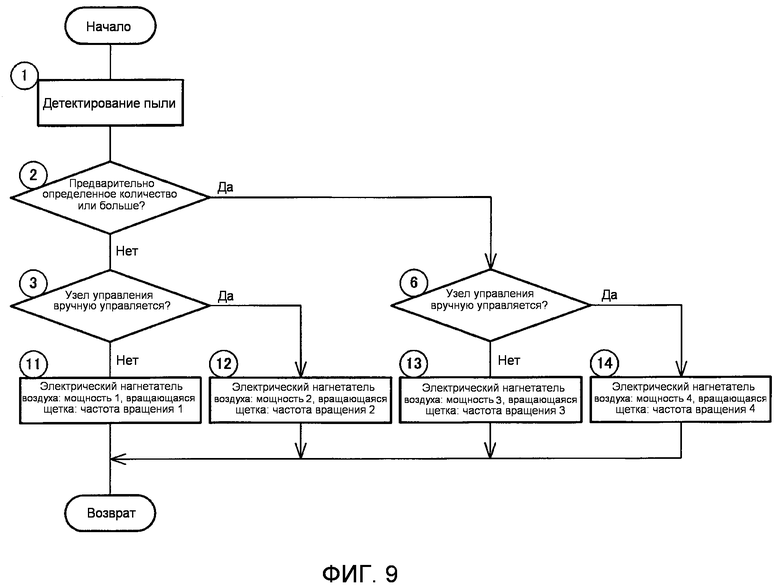
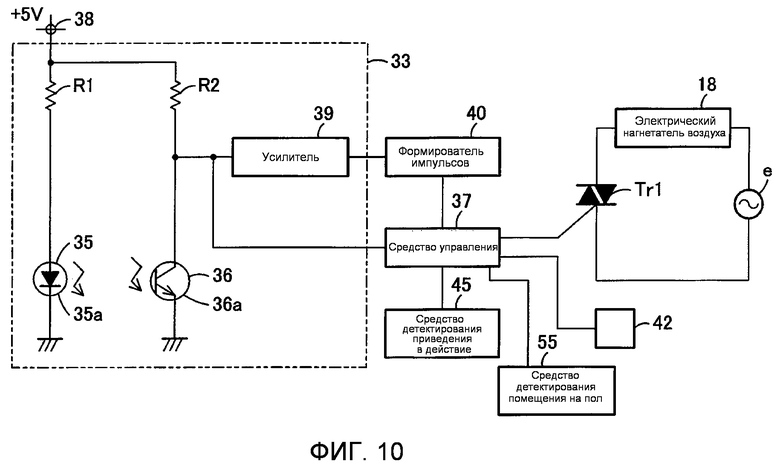

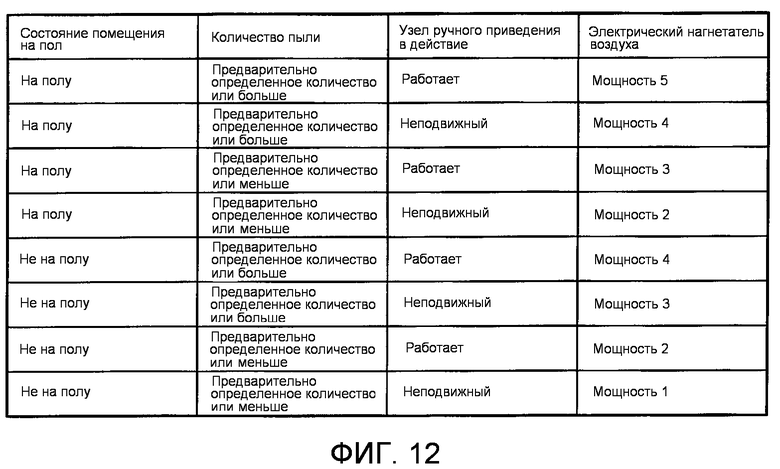


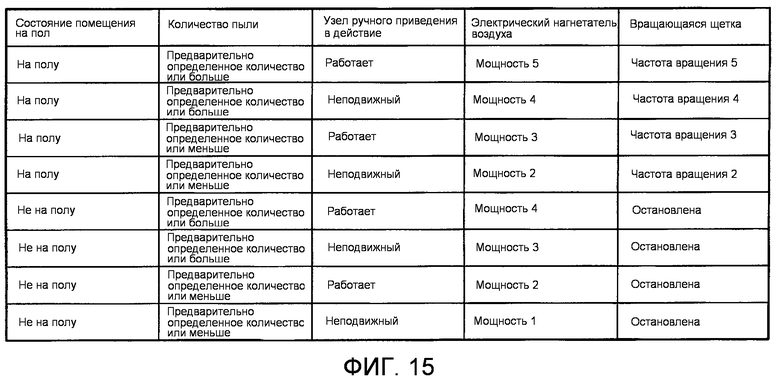





Изобретение относится к электрическому пылесосу, включающему в себя средство детектирования количества пыли для детектирования количества пыли, проходящей через воздушный канал, и средство детектирования приведения в действие для детектирования приведения в действие узла ручного приведения в действие. Согласно одному варианту осуществления электрический пылесос включает в себя: основной корпус очистителя, вмещающий электрический нагнетатель воздуха; воздушный канал, сообщающийся со стороной всасывания электрического нагнетателя воздуха; фотодетектор для детектирования количества пыли, проходящей через воздушный канал; узел ручного приведения в действие, выполненный с возможностью захвата и приведения в действие; средство детектирования приведения в действие для детектирования приведения в действие узла ручного приведения в действие; и средство управления, которое управляет приведением в действие электрического нагнетателя воздуха на основе количества пыли, детектируемого фотодетектором, и приведения в действие, детектируемого средством детектирования приведения в действие. 5 з.п. ф-лы, 20 ил.
1. Электрический пылесос, содержащий: основной корпус очистителя, вмещающий электрический нагнетатель воздуха; воздушный канал, сообщающийся со стороной всасывания электрического нагнетателя воздуха; средство детектирования количества пыли для детектирования количества пыли, проходящей через воздушный канал; узел ручного приведения в действие, выполненный с возможностью захвата и приведения в действие; средство детектирования приведения в действие для детектирования приведения в действие узла ручного приведения в действие; и средство управления, которое управляет приведением в действие электрического нагнетателя воздуха на основе количества пыли, детектируемого средством детектирования количества пыли, и приведения в действие узла ручного приведения в действие, детектируемого средством детектирования приведения в действие.
2. Электрический пылесос по п.1, дополнительно содержащий привод, вращающийся чистящий корпус, вращательно приводимый в действие приводом, и корпус с всасывающим отверстием, выполненный с возможностью составлять часть воздушного канала, при этом средство управления соответственно управляет приведением в действие электрического нагнетателя воздуха и приведением в действие привода на основе количества пыли, детектируемого средством детектирования количества пыли, и приведения в действие узла ручного приведения в действие, детектируемого средством детектирования приведения в действие.
3. Электрический пылесос по п.1, дополнительно содержащий корпус с всасывающим отверстием, выполненный с возможностью составлять часть воздушного канала, и средство детектирования помещения на пол для детектирования состояния помещения на пол корпуса с всасывающим отверстием, при этом средство управления управляет приведением в действие электрического нагнетателя воздуха на основе количества пыли, детектируемого средством детектирования количества пыли, приведения в действие узла ручного приведения в действие, детектируемого средством детектирования приведения в действие, и состояния помещения на пол корпуса с всасывающим отверстием, детектируемого средством детектирования помещения на пол.
4. Электрический пылесос по п.2, дополнительно содержащий средство детектирования помещения на пол для детектирования состояния помещения на пол корпуса с всасывающим отверстием, при этом средство управления управляет приведением в действие электрического нагнетателя воздуха и приведением в действие привода на основе количества пыли, детектируемого средством детектирования количества пыли, приведения в действие узла ручного приведения в действие, детектируемого средством детектирования приведения в действие, и состояния помещения на пол корпуса с всасывающим отверстием, детектируемого средством детектирования помещения на пол.
5. Электрический пылесос по п.1, в котором средство управления, по меньшей мере, относительно увеличивает вводную мощность электрического нагнетателя воздуха, когда количество пыли, детектируемое средством детектирования количества пыли, не меньше предварительно определенного количества, и средство детектирования приведения в действие детектирует то, что узел ручного приведения в действие не работает.
6. Электрический пылесос по п.1, в котором средство управления, по меньшей мере, относительно увеличивает входную мощность электрического нагнетателя воздуха, когда количество пыли, детектируемое средством детектирования количества пыли, не превышает предварительно определенное количество, и средство детектирования приведения в действие детектирует то, что узел ручного приведения в действие работает.
| JP 2010094400 А, 30.04.2010 | |||
| JP 7327893 А, 19.12.1995 | |||
| JP 7051206 А, 28.02.1995 | |||
| JP 2001008871 А, 16.01.2001. |

