ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Варианты осуществления, описанные в данном документе, в основном относятся к электропылесосу, включающему в себя воздушный канал, сообщающийся со стороной всасывания электровентилятора.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Обычно, электропылесос включает в себя основной корпус пылесоса, вмещающий электровентилятор, и выполнен таким образом, что воздушный канал, в который всасывается пыль посредством приведения в действие электровентилятора, сообщается со стороной всасывания электровентилятора. Было необходимо, чтобы такой электропылесос имел устройство, с помощью которого можно было определять уровень качества очистки для избавления пользователя от скучной и изнурительной очистки.
Например, известно устройство, в котором процесс очистки сведен к затратам, подлежащим расчету на основании информации о времени очистки и месте очистки, для уведомления пользователя.
Следовательно, необходим электропылесос, который имеет устройство для более эффективного уведомления пользователя об уровне качества очистки.
СПИСОК ПРОТИВОПОСТАВЛЕННЫХ МАТЕРИАЛОВ
Патентная литература
Патентный документ 1: японская выложенная патентная заявка № 2004-272650
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническая проблема
Целью настоящего изобретения является создание электропылесоса, обеспечивающего эффективное уведомление пользователя об уровне выполнения очистки.
Решение проблемы
Электропылесос в соответствии с вариантом осуществления включает в себя основной корпус пылесоса, вмещающий электровентилятор. Кроме того, электропылесос включает в себя воздушный канал, сообщающийся со стороной всасывания электровентилятора. Кроме того, электропылесос включает в себя всасывающую часть, перемещаемую по поверхности, подлежащей очистке, причем всасывающая часть отделяет часть воздушного канала. Кроме того, электропылесос включает в себя устройство для определения количества пыли, которое определяет количество пыли, проходящей через внутреннюю часть воздушного канала посредством в действие электровентилятора. Кроме того, электропылесос включает в себя счетное устройство, которое рассчитывает эффективность очистки на основании суммарного количества пыли, определенного устройством для определения количества пыли, количества движения по поверхности, подлежащей очистке, всасывающей части и время движения по поверхности, подлежащей очистке, всасывающей части. Электропылесос дополнительно включает в себя устройство уведомления, которое обеспечивает уведомление об эффективности очистки, рассчитанной счетным устройством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блок-схема внутреннего устройства электропылесоса в соответствии с первым вариантом осуществления;
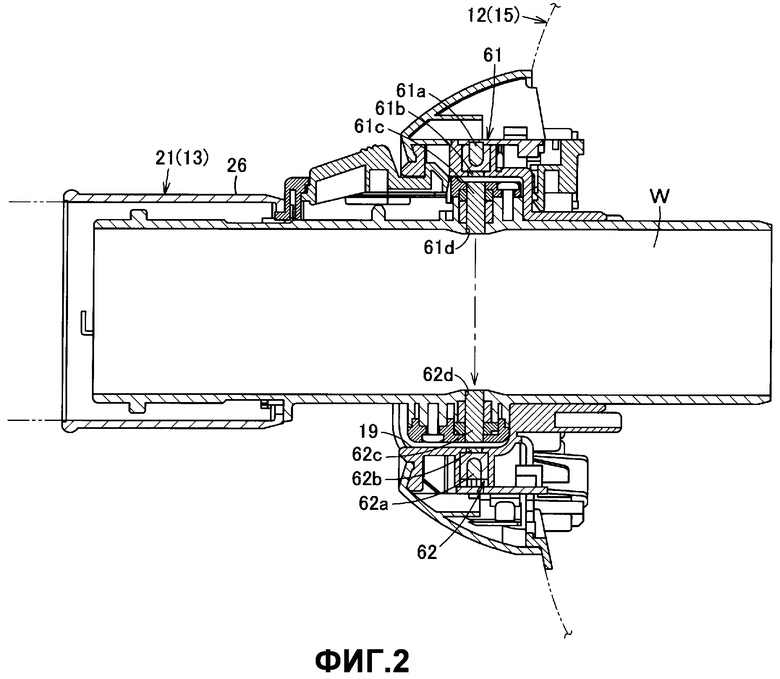
фиг.2 - вид в вертикальном поперечном разрезе части электропылесоса;
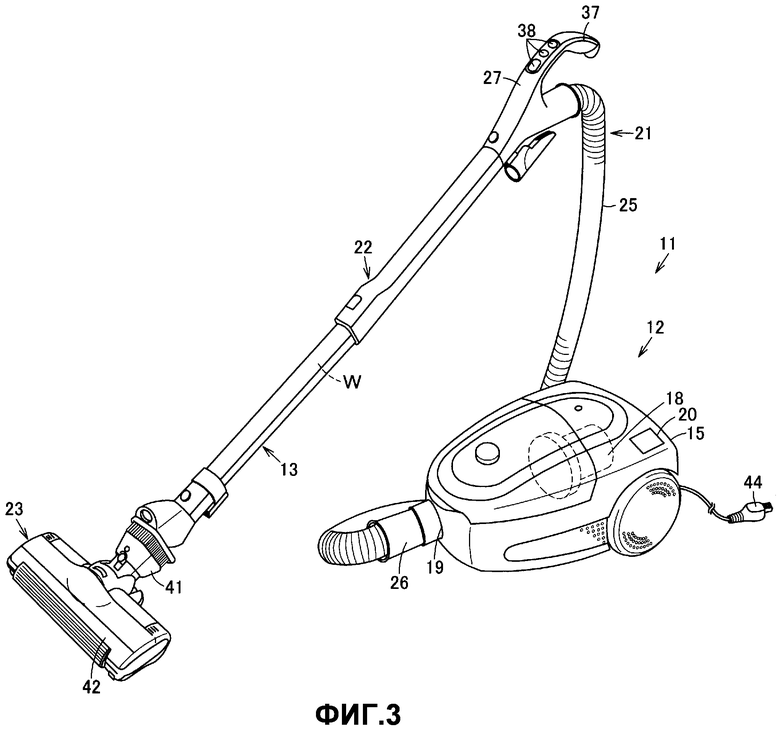
фиг.3 - перспективный вид электропылесоса;
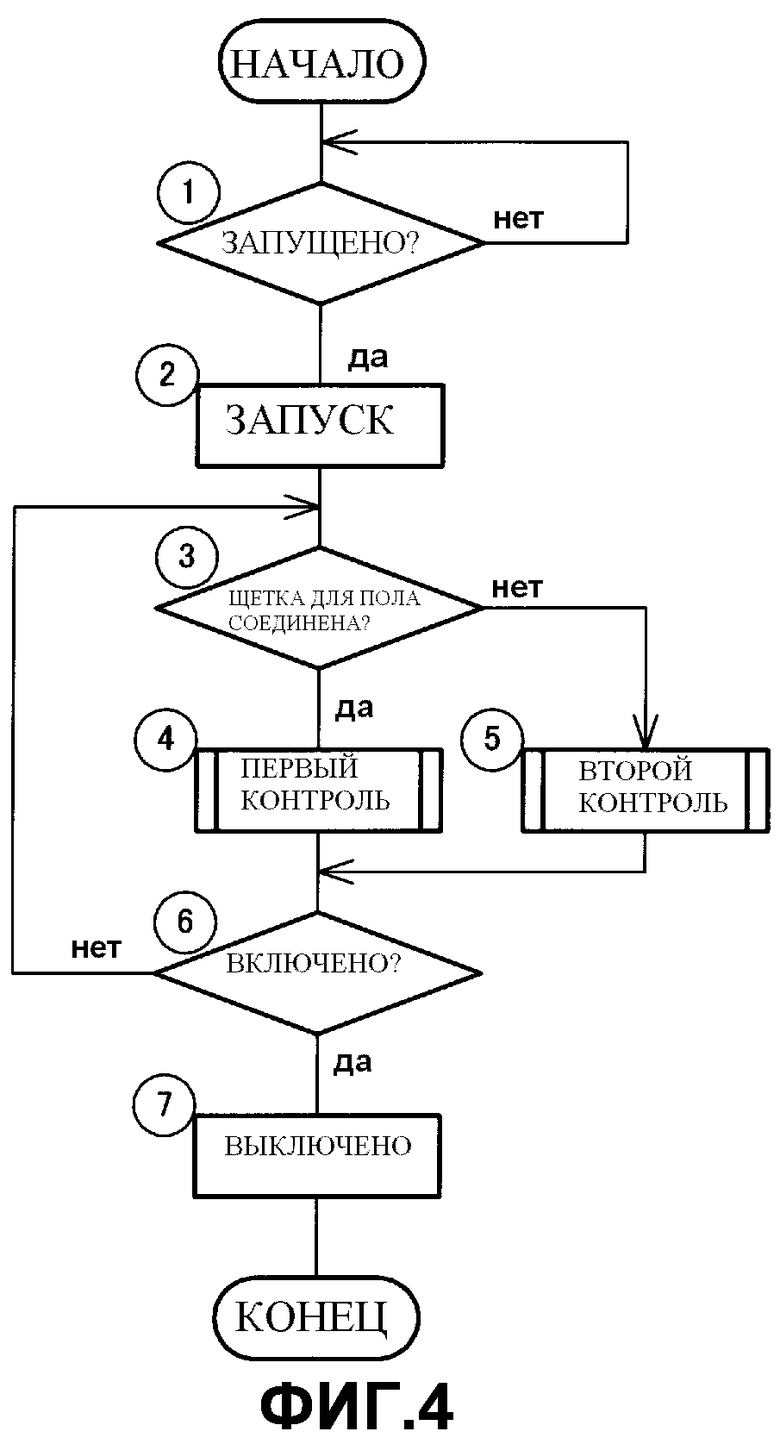
фиг.4 - схема последовательности операций полного управления электропылесосом;
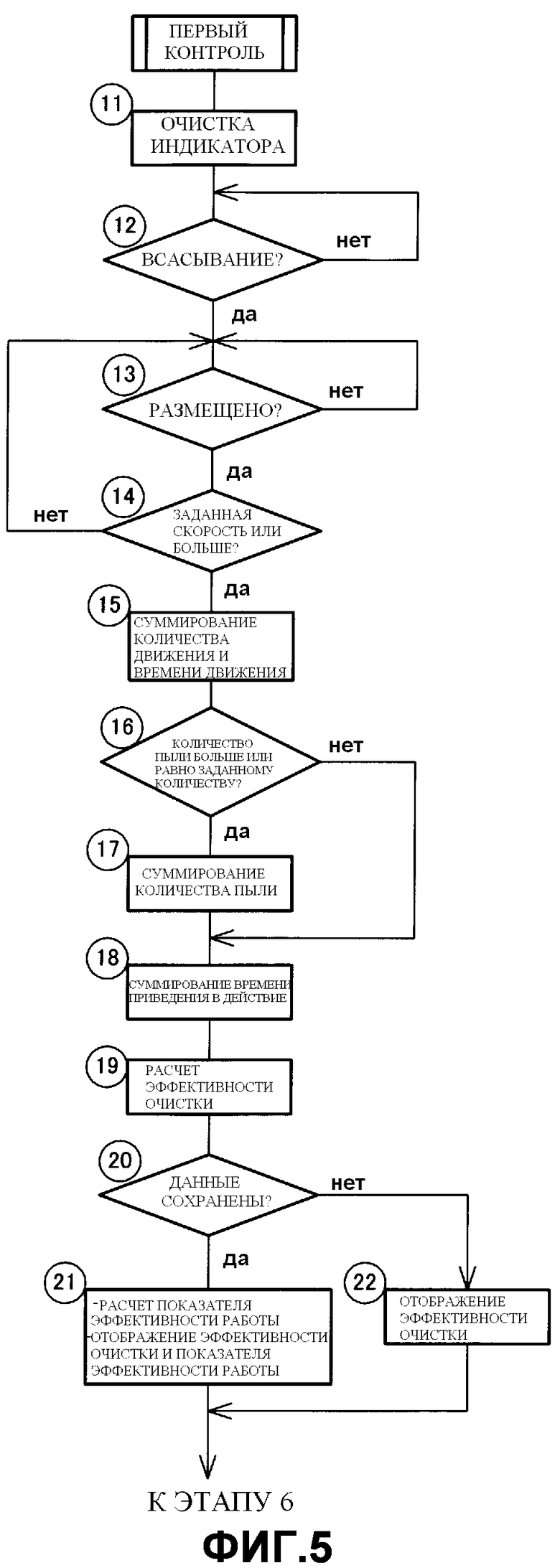
фиг.5 - схема последовательности операций первого управления электропылесосом;
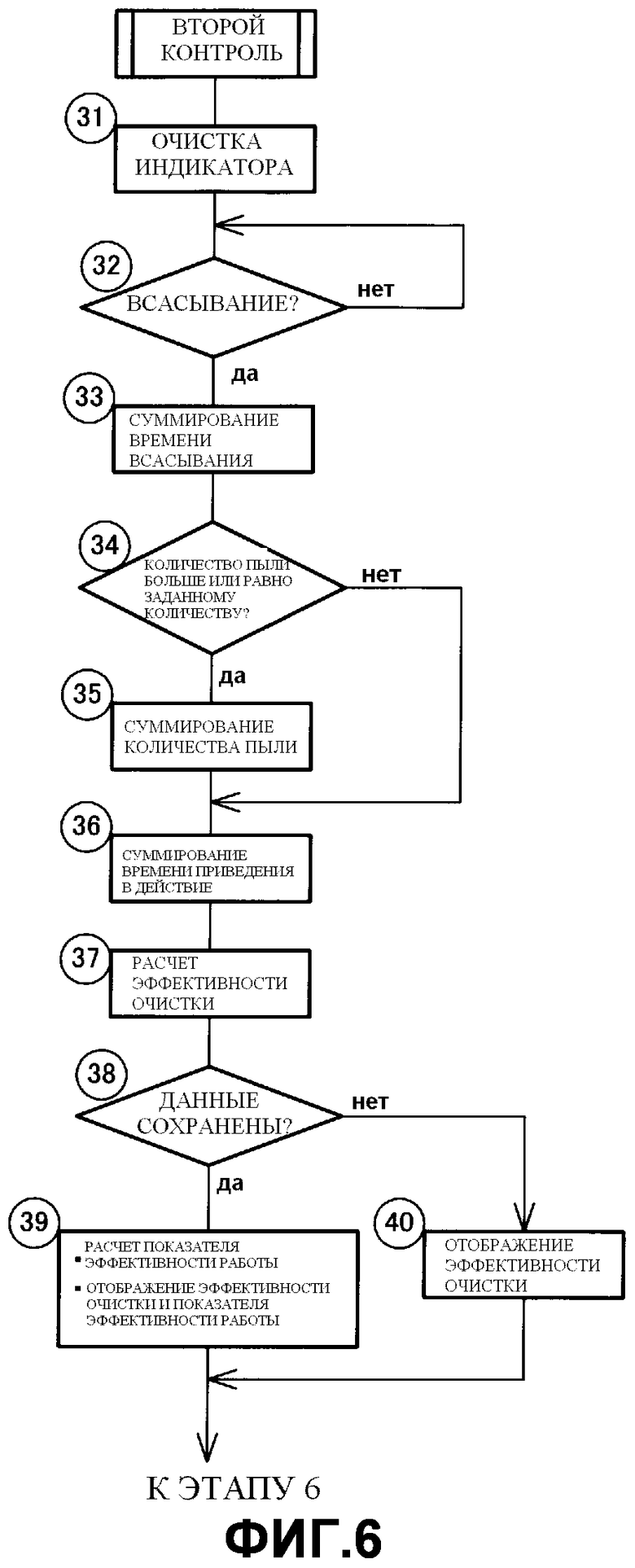
фиг.6 - схема последовательности операций второго управления электропылесосом;
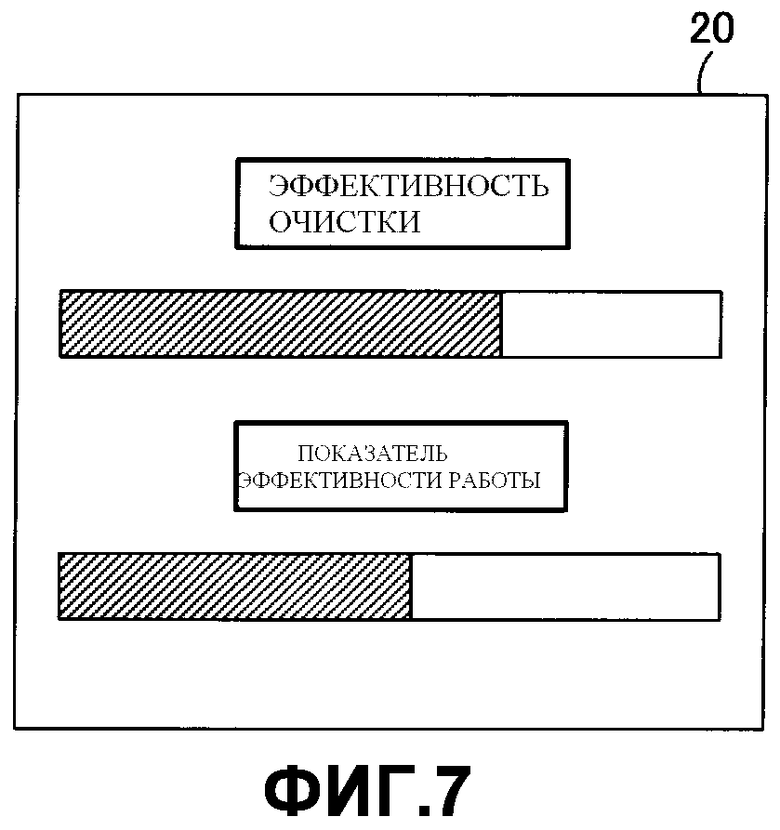
фиг.7 - пояснительная схема уведомления уведомляющим устройством электропылесоса;
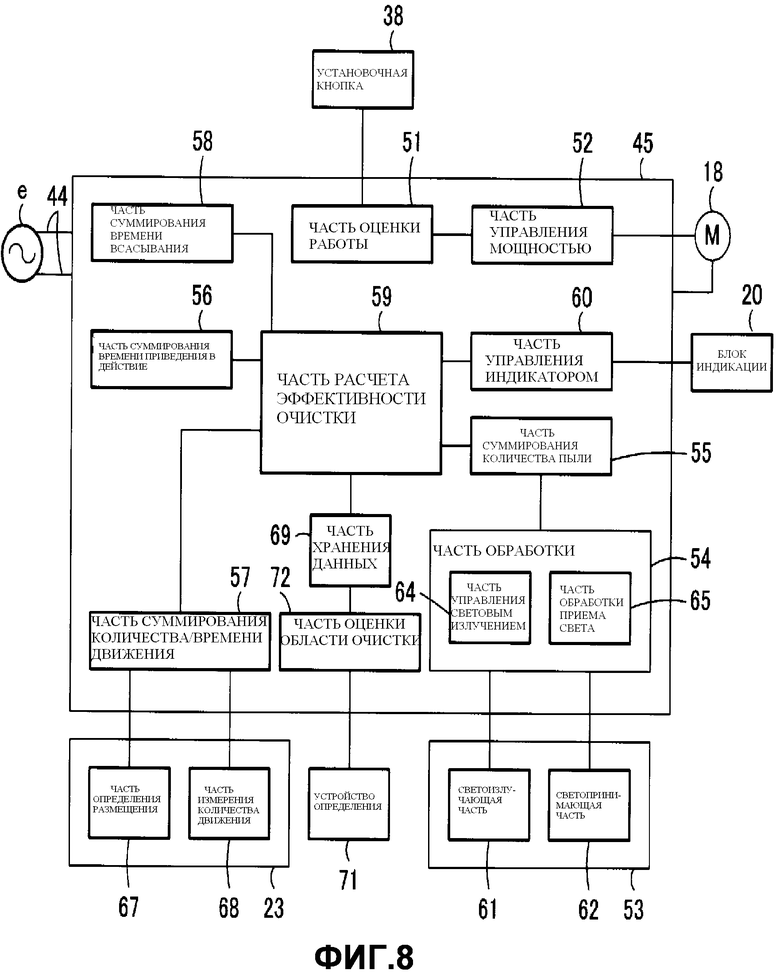
фиг.8 - блок-схема внутреннего устройства электропылесоса в соответствии со вторым вариантом осуществления;
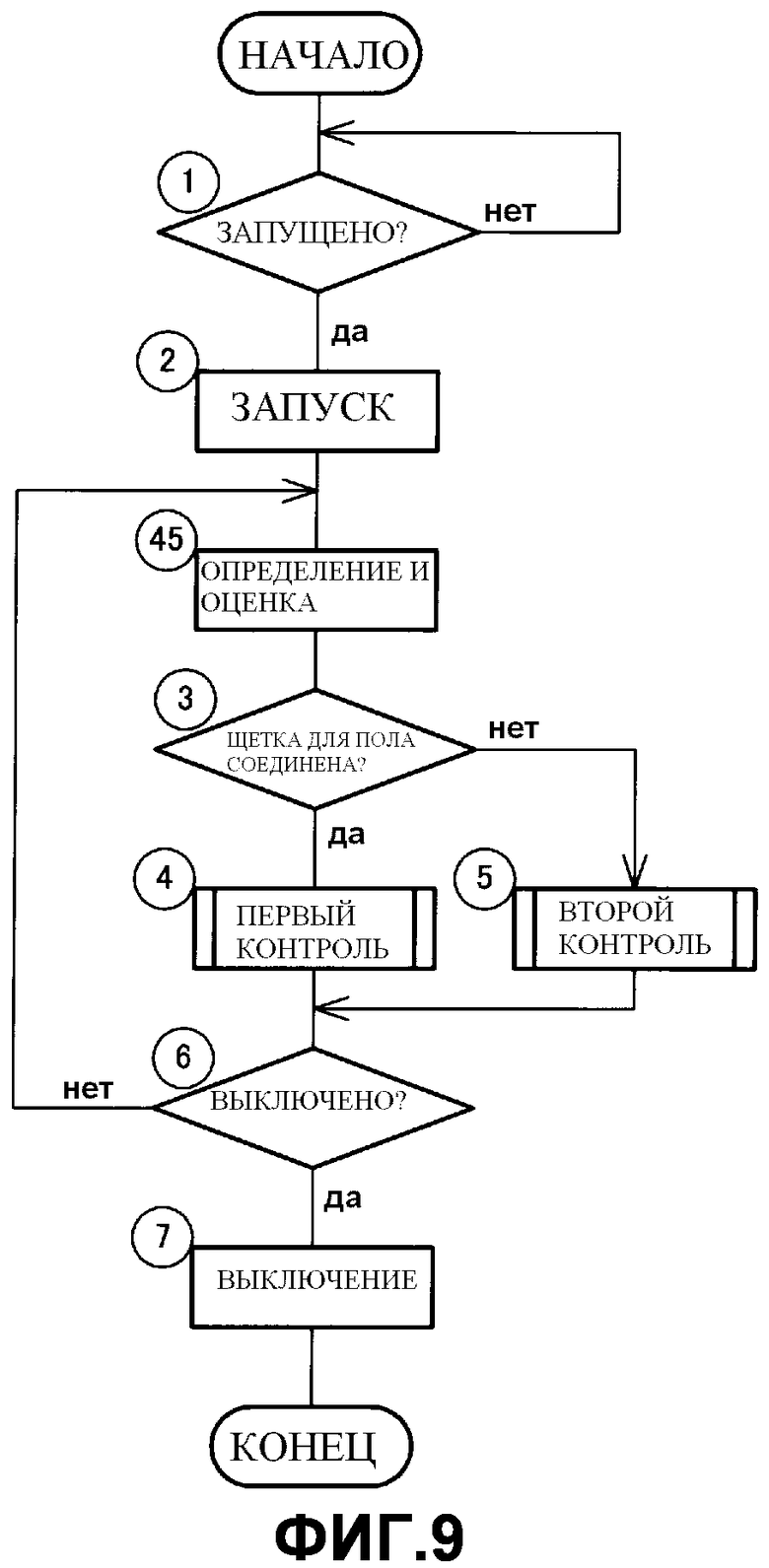
фиг.9 - схема последовательности операций полного управления электропылесосом;
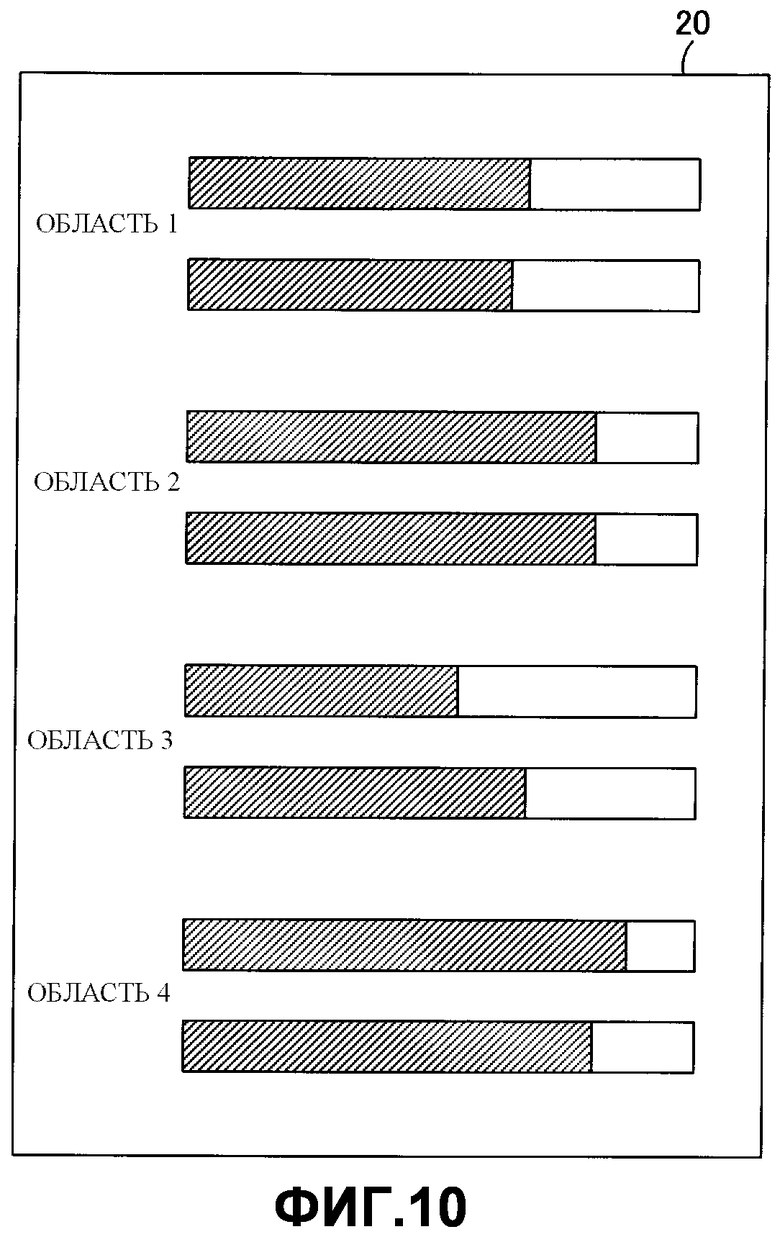
фиг.10 - пояснительная схема уведомления уведомляющим устройством электропылесоса;
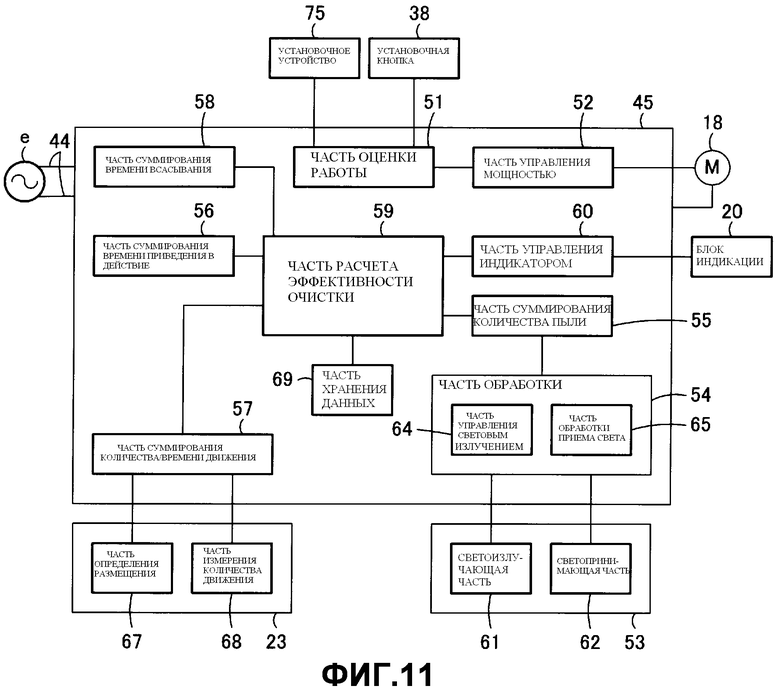
фиг.11 - блок-схема внутреннего устройства электропылесоса в соответствии с третьим вариантом осуществления;
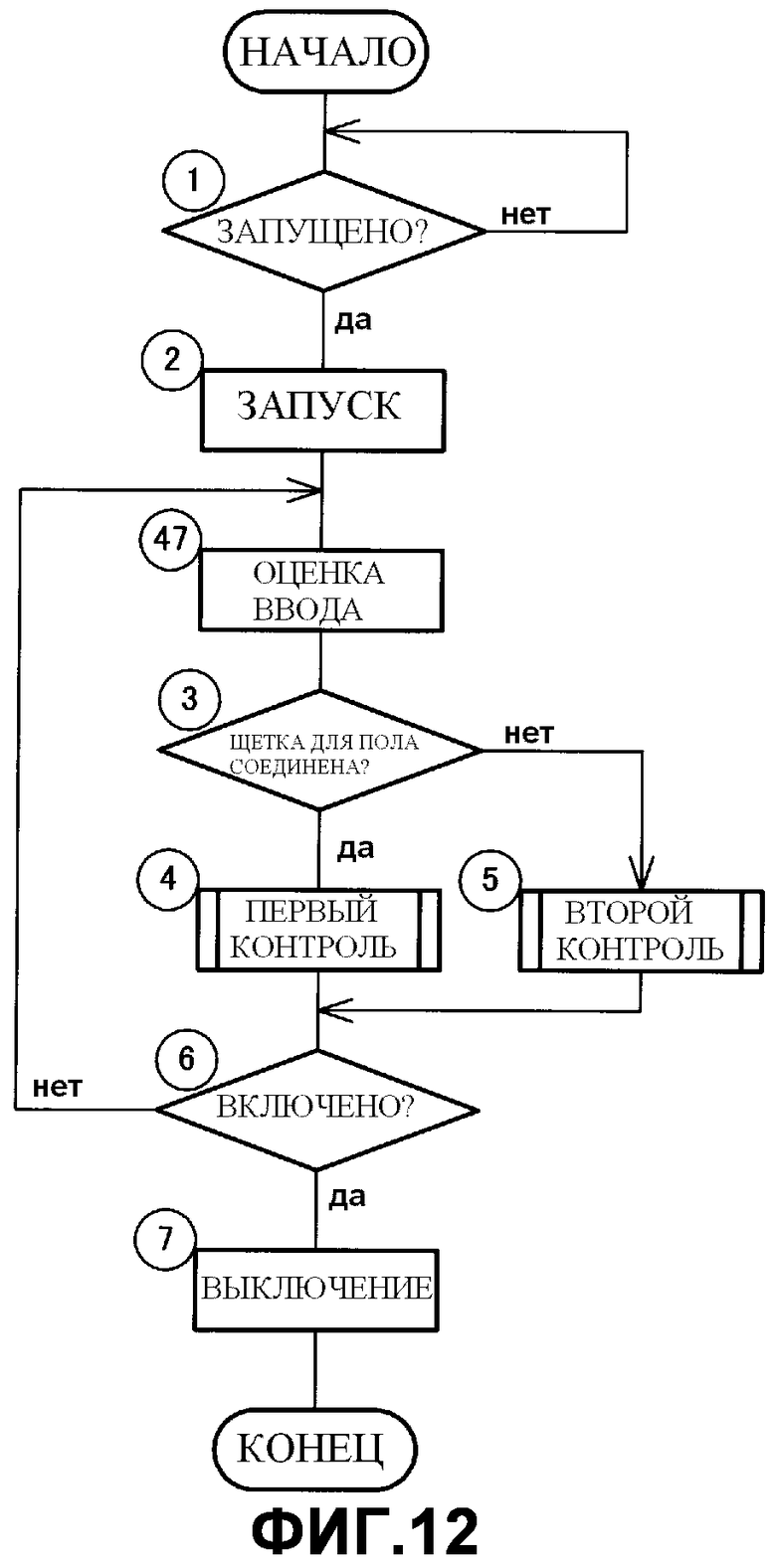
фиг.12 - схема последовательности операций полного управления электропылесосом;
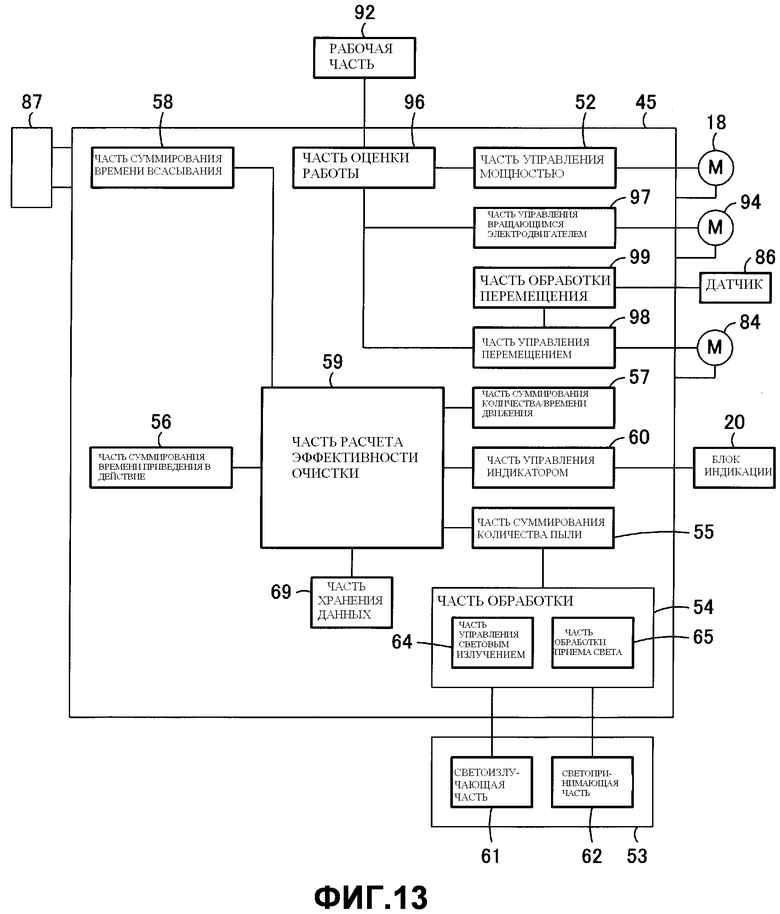
фиг.13 - блок-схема внутреннего устройства электропылесоса в соответствии с четвертым вариантом осуществления;
фиг.14 - вид сверху электропылесоса;
фиг.15 - вид снизу электропылесоса;
фиг.16 - схема последовательности операций управления очисткой электропылесоса.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже устройство первого варианта осуществления будет описано со ссылкой на чертежи.
На фиг.3 ссылочная позиция 11 обозначает так называемый электропылесос контейнерного типа, и этот электропылесос 11 включает в себя основной корпус 12 пылесоса и элемент 13, образующий воздушный канал, который является трубкой, которая является отдельным элементом от основного корпуса 12 пылесоса и соединена с возможностью съема с основным корпусом 12 пылесоса.
Основной корпус 12 пылесоса включает в себя полый кожух 15 основного корпуса, поворачивающийся и перемещающийся по поверхности, подлежащей очистке, и пылесборная камера основного корпуса (не показана) и камера электровентилятора отделены спереди и сзади внутри кожуха 15 основного корпуса. Кроме того, электровентилятор 18 расположен в камере электровентилятора, и сторона всасывания электровентилятора 18 сообщается с пылесборной камерой основного корпуса. Кроме того, пылесборная часть фильтра, пылесборный мешок, пылесборное устройство (пылесборная воронка) расположены в пылесборной камере основного корпуса. Кроме того, на переднем участке кожуха 15 основного корпуса всасывающее отверстие 19 основного корпуса, сообщающееся с пылесборной камерой основного корпуса, с которым торцевая сторона основания элемента 13, образующего воздушный канал, соединена, открыто. Кроме того, блок 20 индикации, такой как жидкокристаллическая панель, служащая в качестве устройства уведомления, расположен на верхней части кожуха 15 основного корпуса. Кроме того, ниже будет дано описание при условии, что направление вдоль направления перемещения электропылесоса 11 (основного корпуса 12 пылесоса) рассматривается как продольное направление, и горизонтальное направление (направление в обе стороны), пересекающееся с (ортогональное к продольному направлению) продольным направлением, рассматривается как направление по ширине.
Кроме того, элемент 13, образующий воздушный канал, содержит элемент 21 в форме длинного шланга, раздвижную трубку 22, соединенную с возможностью отсоединения со шлангом 21, щетку 23 для пола, которая является элементом с всасывающим отверстием в качестве всасывающей части, которая соединена с возможностью съема с раздвижной трубкой 22, который образует воздушный канал W, сообщающийся со стороной всасывания электровентилятора 18, внутри себя. Кроме того, элемент 13, образующий воздушный канал, может, например, использоваться для отсоединения щетки 23 для пола и может использоваться для отсоединения щетки 23 для пола и раздвижной трубки 22.
Шланг 21, в целом, имеет длинный трубчатый основной корпус 25 шланга, соединительную трубчатую часть 26, образованную для сообщения с торцевой стороной основания (торцевая сторона вниз по потоку), которая является одной торцевой стороной основного корпуса 25 шланга, и часть 27 ручного управления, которая образована для сообщения с концевой торцевой стороной (торцевой стороной вверх по потоку), которая является другой торцевой стороной основного корпуса 25 шланга, и, например, предназначена для захвата и манипулирования элементом 13, образующим воздушный канал.
Основной корпус 25 шланга выполнен из синтетической пластмассы или ей подобного в цилиндрической гофрированной форме, и электропроводка (не показана) для электрического соединения стороны части 27 ручного управления и стороны основного корпуса 12 пылесоса закреплена как одно целое и спирально на наружной стороне воздушного канала W.
Соединительная трубчатая часть 26 является участком, подлежащим вставке, для соединения с всасывающим отверстием 19 основного корпуса и выполнена цилиндрической из синтетической пластмассы или ей подобного, более жесткой, чем основной корпус 25 шланга. Кроме того, в соединительной трубчатой части 26 расположены выводы (не показаны), электрически соединенные с проводкой, расположенной внутри основного корпуса 25 шланга, и эти выводы электрически соединены со стороной основного корпуса 12 пылесоса при помощи соединительной трубчатой части 26, вставляемой для соединения с всасывающим отверстием 19 основного корпуса.
Кроме того, часть 27 ручного управления, по существу, выполнена цилиндрической из синтетической пластмассы или ей подобного, более жесткой, чем основной корпус 25 шланга, и часть 37 для захвата, которая захватывается пользователем, выполнена от торцевой стороны вверх по потоку к торцевой стороне вниз по потоку с возможностью выступа. Множество установочных кнопок 38, служащих в качестве установочного устройства для установки работы электровентилятора 18 и ему подобного, расположены в части 37 для захвата.
Кроме того, щетка 23 для пола окантовывает часть (верхнюю концевую сторону) воздушного канала W и включает в себя соединительную трубку 41, одна торцевая сторона которой соединена с возможностью сообщения с концевой торцевой стороной (торцевой стороной вверх по потоку) раздвижной трубки 22, горизонтальный длинный корпус 42 кожуха, который соединен с другой торцевой стороной соединительной трубки 41 для перемещения с возможностью поворота в вертикальном направлении или по окружности, и ходовые колеса (не показаны), которые установлены для свободного вращения в корпусе 42 кожуха и размещаются на поверхности, подлежащей очистке, которые приводятся во вращение для обеспечения перемещения щетки 23 для пола по поверхности, подлежащей очистке. Кроме того, всасывающее отверстие, сообщающееся с другой торцевой стороной соединительной трубки 41, образовано на нижнем участке корпуса 42 кожуха, обращенном к поверхности пола. Кроме того, вращающаяся щетка, служащая в качестве вращающегося очистительного элемента, расположена с возможностью вращения на всасывающем отверстии щетки 23 для пола, и поворотный электродвигатель или ему подобное, служащий в качестве устройства для приведения в действие очистительного элемента для приведения во вращение вращающейся щетки, может быть расположен внутри корпуса 42 кожуха.
Затем, будет описано внутреннее устройство электропылесоса 11.
Электропылесос 11 включает в себя блок 45 управления, такой как микрокомпьютер, который получает электроэнергию, подаваемую из коммерческого источника e питания переменного тока, служащего в качестве части источника питания, изображенной на фиг.1, через шнур 44 электропитания, размещенный в кожухе 15 основного корпуса для втягивания и вытягивания. Кроме того, в качестве части источника питания, например, может использоваться батарея, такая как вторичная батарея, встроенная в кожухе 15 основного корпуса 12 пылесоса.
Блок 45 управления включает в себя часть 51 оценки работы, служащую в качестве устройства оценки работы, электрически соединенного с установочными кнопками 38, часть 52 управления мощностью, служащую в качестве устройства управления мощностью, которое электрически соединено с частью 51 оценки работы и управляет работой электровентилятора 18, часть 54 обработки данных, служащую в качестве устройства обработки данных, которое электрически соединено с оптическим датчиком 53, служащим в качестве устройства определения количества пыли, которое определяет количество пыли, проходящее через воздушный канал W за счет приведения в действие электровентилятора 18, часть 55 суммирования количества пыли, служащую в качестве устройства суммирования количества пыли, электрически соединенного с частью 54 обработки данных, часть 56 суммирования времени приведения в действие, служащую в качестве устройства суммирования времени приведения в действие, которое определяет время приведения в действие электровентилятора 18 (время, в течение которого электровентилятор 18 непрерывно приведен в действие с самого начала приведения в действие), часть 57 суммирования времени/количества движения, служащую в качестве устройства суммирования времени/количества движения, которое суммирует количество движения (расстояние перемещения) по поверхности, подлежащей очистке, и время щетки 23 для пола, часть 58 суммирования времени всасывания, которая суммирует время фактического всасывания пыли, часть 59 расчета эффективности очистки, служащую в качестве расчетного устройства, которое рассчитывает эффективность очистки, и часть 60 управления индикатором, служащую в качестве устройства управления уведомлением, которое электрически соединено с частью 59 расчета эффективности очистки и управляет работой блока 20 индикации. Кроме того, блок 45 управления может включать в себя часть управления устройством приведения в действие очистительного элемента, которая управляет приведением в действие поворотного электродвигателя, например, в случае, когда вышеописанный поворотный электродвигатель расположен в щетке 23 для пола. Кроме того, соответствующие части, составляющие блок 45 управления, могут быть соответственно выполнены как одно целое или быть отдельными элементами, и могут быть расположены в произвольных положениях, например, во внутренней части кожуха 15 основного корпуса 12 пылесоса.
Часть 51 оценки работы должна оценивать работу установочных кнопок 38, задействованных пользователем для установки режима работы электровентилятора 18 относительно части 52 управления мощностью в соответствии с работой этих установочных кнопок 38.
Кроме того, часть 52 управления мощностью может регулировать, например, угол сдвига фаз электровентилятора 18 с помощью элемента управления (не показан) или ему подобного в соответствии с режимом работы, установленным частью 51 оценки работы.
Кроме того, как показано на фиг.1 и 2, оптический датчик 53 включает в себя светоизлучающую часть 61, служащую в качестве светоизлучающего устройства, например, и светопринимающую часть 62, служащую в качестве светопринимающего устройства, которое принимает инфракрасный свет, излучаемый светоизлучающей частью 61 в положениях, противоположных друг к другу, и можно выдавать сигнал, соответствующий количеству пыли, проходящему через воздушный канал W, в часть 54 обработки данных в соответствии с количеством инфракрасного света, принятым светопринимающей частью 62 от светоизлучающей части 61.
Светоизлучающая часть 61 содержит светоизлучающий элемент 61a, такой как светодиод, который излучает свет, такой как инфракрасный свет, и несколько линз 61b и 61c со светоизлучающей стороной, служащих в качестве элементов, направляющих свет от светоизлучающей стороны, которые направляют свет, излучаемый светоизлучающим элементом 61a, в воздушный канал W.
Светоизлучающий элемент 61a расположен, например, внизу на верхней части всасывающего отверстия 19 кожуха 15 основного корпуса 12 пылесоса и выполнен с возможностью излучения инфракрасного света вниз.
Кроме того, одна линза 61b со светоизлучающей стороной расположена на внутренней поверхности всасывающего отверстия 19 основного корпуса на нижней стороне, которая является стороной выхода инфракрасного света светоизлучающего элемента 61a.
Кроме того, другая линза 61c со светоизлучающей стороной расположена в положении напротив нижней стороны светоизлучающего элемента 61a (линзы 61b со светоизлучающей стороной) в положении, в котором соединительная трубчатая часть 26 элемента 13, образующего воздушный канал, соединена с всасывающим отверстием 19 основного корпуса. Эта другая линза 61c со светоизлучающей стороной установлена в части 61d отверстия на светоизлучающей стороне, просверленной в радиальном направлении в соединительной трубчатой части 26, для воздухонепроницаемого уплотнения части 61d отверстия на светоизлучающей стороне, и ее одна торцевая сторона обращена к стороне светоизлучающего элемента 61a (стороне линзы 61b со светоизлучающей стороной), и другая торцевая сторона обращена к внутренней части воздушного канала W. То есть, в любом случае воздух внутри воздушного канала W не выходит на наружную сторону воздушного канала W из части 61d отверстия для светоизлучающей стороны.
Таким же образом, светопринимающая часть 62 содержит светопринимающий элемент 62a, такой как фототранзистор, который обнаруживает выход инфракрасного света из светоизлучающей части 61, и несколько линз 62b и 62c со светопринимающей стороной, служащих в качестве элементов, направляющих свет от светопринимающей стороны, которые направляют свет, выходящий из светоизлучающей части 61 в светопринимающий элемент 62a.
Светопринимающий элемент 62a расположен вверх, т.е. к стороне светоизлучающего элемента 61a на нижнем участке всасывающего отверстия 19 кожуха 15 основного корпуса 12 пылесоса, например, и выполнен с возможностью приема инфракрасного света, выходящего из светоизлучающего элемента 61a, для выдачи сигнала, соответствующего количеству принятого света.
Кроме того, одна линза 62b со светопринимающей стороной расположена на внутренней поверхности всасывающего отверстия 19 основного корпуса на верхней стороне, которая является стороной входа инфракрасного света относительно светоизлучающего элемента 62a.
Кроме того, другая линза 62c со светопринимающей стороной расположена в положении напротив верхней стороны светопринимающего элемента 62a (линзы 62b со светопринимающей стороной) в положении, в котором соединительная трубчатая часть 26 элемента 13, образующего воздушный канал, соединена с всасывающим отверстием 19 основного корпуса. Эта другая линза 62c со светопринимающей стороной установлена в части 62d отверстия на светопринимающей стороне, просверленной в радиальном направлении в соединительной трубчатой части 26 для воздухонепроницаемого уплотнения части 62d отверстия на светопринимающей стороне, и ее одна торцевая сторона обращена к стороне светопринимающего элемента 62a (стороне линзы 62b со светопринимающей стороной), и другая торцевая сторона обращена к внутренней части воздушного канала W. То есть, в любом случае воздух внутри воздушного канала W не выходит на наружную сторону воздушного канала W из части 62d отверстия на светопринимающей стороне.
Затем, что касается оптического датчика 53, в случае, когда количество пыли, проходящей через внутреннюю часть воздушного канала W, является относительно большим (маленьким), блокирование пылью светового излучения от светоизлучающего элемента 61a светоизлучающей части 61 увеличивается (уменьшается), таким образом относительно уменьшая (увеличивая) количество света, принятого светопринимающим элементом 62a светопринимающей части 62. Следовательно, можно определить количество пыли, проходящей через внутреннюю часть воздушного канала W, в соответствии с увеличением или уменьшением количества принятого света.
Кроме того, часть 54 обработки данных содержит часть 64 управления световым излучением, которая регулирует степень светового излучения светоизлучающего элемента 61a светоизлучающей части 61, и часть 65 обработки приема света, которая обрабатывает сигнал из светопринимающей части 62 и электрически соединена с частью 55 суммирования количества пыли. Кроме того, часть 65 обработки приема света выполнена с возможностью усиления сигнала от светопринимающего элемента 62a светопринимающей части 62, который является выходным сигналом в соответствии с количеством принятого света, для выдачи сигнала в часть 59 расчета эффективности очистки.
Часть 55 суммирования количества пыли предназначена для расчета суммарного количества пыли во время приведения в действие электровентилятора 18 за счет суммирования сигнала, обработанного частью 65 обработки приема света части 54 обработки данных.
Кроме того, часть 56 суммирования времени приведения в действие имеет функцию, например, регулятора времени или ему подобного и повторно устанавливается в начале приведения в действие электровентилятора 18, и суммирует время, в течение которого электровентилятор 18 приведен в действие, или время до выключения электровентилятора 18, для расчета времени.
Кроме того, часть 57 суммирования времени/количества движения электрически соединена с частью 67 определения размещения и частью 68 определения количества движения, расположенными в щетке 23 для пола. Часть 67 определения размещения является переключателем или ему подобным, выступающим на нижнем участке корпуса 42 кожуха щетки 23 для пола, и включается или выключается вследствие контакта с поверхностью, подлежащей очистке, для определения размещения относительно поверхности, подлежащей очистке. Кроме того, частью 68 определения количества движения является датчик или ему подобное, который определяет число оборотов или скорость вращения ходового колеса корпуса 42 кожуха, например, чтобы можно было определить скорость движения и расстояние щетки 23 для пола. Кроме того, часть 57 суммирования количества времени/количества движения суммирует скорость движения и расстояние щетки 23 для пола, определенные частью 68 определения количества движения, в положении, в котором размещение щетки 23 для пола определено частью 67 определения размещения для расчета количества движения по поверхности, подлежащей очистке, щетки 23 для пола, и суммирует время, в течение которого размещение щетки 23 для пола определено частью 67 определения размещения, для расчета времени движения по поверхности, подлежащей очистке, щетки 23 для пола.
Кроме того, часть 58 суммирования времени всасывания имеет функцию, например, регулятора времени или ему подобного и повторно устанавливается в начале приведения в действие электровентилятора 18, и суммирует время, в течение которого количество пыли, определенное оптическим датчиком 53, больше или равно заданному количеству, установленному заранее, для расчета фактического (практического) времени всасывания пыли.
Кроме того, часть 59 расчета эффективности очистки имеет функцию определения закрепления или отсоединения щетки 23 для пола относительно воздушного канала W (фиг.3) и предназначена для расчета эффективности очистки на основании суммарного количества пыли, рассчитанного частью 55 суммирования количества пыли, количества движения и времени движения по поверхности, подлежащей очистке, щетки 23 для пола, которые рассчитаны частью 57 суммирования времени/количества движения, времени приведения в действие электровентилятора 18, рассчитанного частью 56 суммирования времени приведения в действие, времени всасывания, рассчитанного частью 58 суммирования времени всасывания, и им подобного. Кроме того, часть 59 расчета эффективности очистки электрически соединена с частью 69 хранения данных, такой как энергонезависимая память, и рассчитывает настоящий коэффициент эффективности работы на основании среднего значения предыдущих нескольких эффективностей очистки при очистке, сохраненных в части 69 хранения данных, или эффективностей очистки и т.д. при очистке в течение конкретного прошлого периода.
Кроме того, в качестве функции определения закрепления и отсоединения щетки 23 для пола специальная часть определения может быть обеспечена в блоке 45 управления или может быть включена в любую одну из других соответствующих частей в блоке 45 управления.
Кроме того, часть 60 управления индикатором предназначена для управления блоком 20 индикации для отображения эффективности очистки и коэффициента эффективности работы, рассчитанного частью 59 расчета эффективности очистки.
Затем, также будет описана работа первого варианта осуществления со ссылкой на схему последовательности операций на фиг.4
Когда пользователь соединяет (вставляет) шнур 44 электропитания с розеткой или ей подобным на поверхности стены в положении, в котором пылесборная часть закреплена на внутренней стороне кожуха 15 основного корпуса 12 пылесоса, источник питания (напряжение) подается из коммерческого источника e питания переменного тока на блок 45 управления.
Затем, блок 45 управления приводится в состояние ожидания для приведения в действие ввода установочных кнопок 38. То есть, блок 45 управления определяет, включен ли электропылесос 11, другими словами, была ли приведена в действие установочная кнопка 38 для запуска электровентилятора 18 (при помощи части 51 оценки работы) (этап 1).
На этапе 1 в случае, когда блок 45 управления определяет, что электропылесос 11 не включен (установочная кнопка 38 не была приведена в действие), этап 1 повторяется, и в случае, когда блок 45 управления определяет, что электропылесос 11 включен (установочная кнопка 38 была приведена в действие), блок 45 управления включает электропылесос 11 (электровентилятор 18) в установленном режиме работы (при помощи части 52 управления мощностью) (этап 2) и определяет, соединена ли щетка 23 для пола с воздушным каналом W (верхним концом (концом вверх по потоку) раздвижной трубки 22) (при помощи части 59 расчета эффективности очистки) (этап 3).
На этапе 3 в случае, когда блок 45 управления определяет, что щетка 23 для пола соединена с воздушным каналом W, осуществляется первое управление на фиг.5 (этап 4), и в случае, когда блок 45 управления определяет, что щетка 23 для пола не соединена с воздушным каналом W, осуществляется второе управление на фиг.6 (этап 5). Пыль, всасываемая вместе с воздухом в воздушный канал W за счет приведения в действие электровентилятора 18, проходит через элемент 13, образующий воздушный канал, и всасывающее отверстие 19 основного корпуса для прохождения в пылесборную часть для улавливания в пылесборной части. Воздух, с которым захватывается пыль, всасывается в электровентилятор 18 для выпуска из электровентилятора 18 при охлаждении электровентилятора 18, для выпуска на наружную сторону кожуха 15 основного корпуса 12 пылесоса.
Затем, после этапа 4 и этапа 5 блок 45 управления определяет, выключен ли электропылесос 11 (электровентилятор 18), другими словами, была ли приведена в действие установочная кнопка 38 для выключения электровентилятора 18 (при помощи части 51 оценки работы) (этап 6). Затем, на этапе 6 в случае, когда блок 45 управления определяет, что электропылесос не выключен (установочная кнопка 38 не была приведена в действие), процесс возвращается к этапу 3, и в случае, когда блок 45 управления определяет, что электропылесос 11 выключен (установочная кнопка 38 была приведена в действие), блок 45 управления выключает электровентилятор 18 (при помощи части 52 управления мощностью) (этап 7) для завершения очистки. Кроме того, в настоящем варианте осуществления оценивается то, соединена или отсоединена щетка 23 для пола, только во время включения электропылесоса 11. Однако эта оценка может быть осуществлена при первом управлении и втором управлении в произвольный период времени, и можно переключать между первым управлением и вторым управлением в соответствии с соединением или отсоединением щетки 23 для пола, оцененными в тот момент.
Затем, также будет описано первое управление со ссылкой на последовательность операций на фиг.5.
Блок 45 управления очищает индикатор на блоке индикации (при помощи части 60 управления индикатором) (этап 11), и, затем, блок 45 управления определяет, всасывает ли должным образом электропылесос 11 воздух, другими словами, работает ли электровентилятор 18 (этап 12).
На этапе 12 в случае, когда блок 45 управления определяет, что электровентилятор 18 не работает, например, случай, когда электропылесос 11 не всасывает воздух вследствие засорения и т.д. пылесборной части, или случай, когда воздушный канал W заблокирован инородным веществом или ему подобным, процесс возвращается к этапу 12. В случае, когда блок 45 управления определяет, что электровентилятор 18 работает, блок 45 управления определяет, расположена ли щетка 23 для пола на поверхности, подлежащей очистке (при помощи части 67 определения размещения) (этап 13).
На этапе 13 в случае, когда блок 45 управления определяет, что щетка 23 для пола не расположена на поверхности, подлежащей очистке, процесс возвращается к этапу 13 (или этапу 12), и в случае, когда блок 45 управления определяет, что щетка 23 для пола расположена на поверхности, подлежащей очистке, блок 45 управления определяет, перемещается ли щетка 23 для пола со скоростью, большей или равной заданной скорости, установленной заранее (при помощи части 68 определения количества движения) (этап 14).
Затем, на этапе 14 в случае, когда блок 45 управления определяет, что щетка 23 для пола не перемещается со скоростью, большей или равной заданной скорости, установленной заранее, процесс возвращается к этапу 13 (или этапу 12), и в случае, когда блок 45 управления определяет, что щетка 23 для пола перемещается со скоростью, большей или равной заданной скорости, установленной заранее, блок 45 управления суммирует количество движения и время движения по поверхности, подлежащей очистке, щетки 23 для пола (при помощи части 57 суммирования времени/количества движения) (этап 15).
Затем, блок 45 управления определяет, является ли количество пыли, определенное оптическим датчиком 53, большим или равным заданному количеству, установленному заранее (этап 16). На этапе 16 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, больше или равно заданному количеству, установленному заранее, блок 45 управления суммирует количество пыли (при помощи части 55 суммирования количества пыли) (этап 17), и процесс переходит к этапу 18. Кроме того, на этапе 16 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, не является большим или равным заданному количеству, установленному заранее, процесс непосредственно переходит к этапу 18.
Затем, блок 45 управления суммирует время приведения в действие электровентилятора 18 (при помощи части 56 суммирования времени приведения в действие) (этап 18) и рассчитывает эффективность очистки при помощи части 59 расчета эффективности очистки на основании количества движения и времени движения по поверхности, подлежащей очистке, щетки 23 для пола, суммированных на этапе 15, и суммарного количества пыли, суммированного на этапе 17 (этап 19). Конкретно, при условии, что суммарное количество пыли, рассчитанное частью 55 суммирования количества пыли, равно D, количество движения и время движения по поверхности, подлежащей очистке, щетки 23 для пола, рассчитанные частью 57 суммирования количества/времени движения, равны, соответственно, L, T1, часть 59 расчета эффективности очистки рассчитывает эффективность очистки H=D/(L·T1). После этого блок 45 управления определяет, сохранено ли среднее значение в части 69 хранения данных (этап 20). На этапе 20 в случае, когда блок 45 управления определяет, что среднее значение сохранено в части 69 хранения данных, блок 45 управления рассчитывает коэффициент эффективности работы при помощи части 59 расчета эффективности очистки и управляет блоком 20 индикации (при помощи части 60 управления индикатором) для отображения коэффициента эффективности работы вместе с эффективностью очистки, как показано на фиг.7 (этап 21), и процесс переходит к этапу 6. Конкретно, часть 59 расчета эффективности очистки рассчитывает коэффициент K=H/A эффективности работы при условии, что среднее значение предыдущих нескольких эффективностей очистки при очистке, сохраненных в части 69 хранения данных, или эффективностей очистки и т.д. при очистке в течение конкретного прошлого периода равно A. С другой стороны, на этапе 20 в случае, когда блок 45 управления определяет, что среднее значение не сохранено в части 69 хранения данных, блок 45 управления управляет блоком 20 индикации (при помощи части 60 управления индикатором) для отображения только эффективности очистки (этап 22), и процесс переходит к этапу 6.
Затем, также будет описано второе управление, показанное на вышеописанном этапе 5 со ссылкой на последовательность операций на фиг.6.
После обработок этапа 31 и этапа 32, которые являются такими же, что и этап 11 и этап 12, блок 45 управления суммирует фактическое время всасывания пыли (при помощи части 58 суммирования времени всасывания) (этап 33).
Затем, блок 45 управления определяет, является ли количество пыли, определенное оптическим датчиком 53, большим или равным заданному количеству, установленному заранее (при помощи части 54 обработки данных) (этап 34). На этапе 34 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, больше или равно заданному количеству, установленному заранее, блок 45 управления суммирует количество пыли (при помощи части 55 суммирования количества пыли) (этап 35), и процесс переходит к этапу 36. Кроме того, на этапе 34 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, не больше или не равно заданному количеству, установленному заранее, процесс непосредственно переходит к этапу 36.
Затем, блок 45 управления суммирует время приведения в действие электровентилятора 18 (при помощи части 56 суммирования времени приведения в действие) (этап 36) и рассчитывает эффективность очистки при помощи части 59 расчета эффективности очистки на основании времени всасывания, суммированного на этапе 33, суммарного количества пыли, суммированного на этапе 35, и времени приведения в действие, суммированного на этапе 36 (этап 37). Конкретно, при условии, что суммарное количество пыли, рассчитанное частью 55 суммирования количества пыли, равно D, время приведения в действие электровентилятора 18, рассчитанное частью 56 суммирования времени приведения в действие, равно T2, и время всасывания, рассчитанное частью 58 суммирования времени всасывания, равно T3, часть 59 расчета эффективности очистки рассчитывает эффективность очистки H=D/(T2·T3). Затем, после того как блок 45 управления осуществит управление на этапах 38-40, которые являются такими же, что и вышеописанные этапы 20-22, процесс переходит к этапу 6.
Как описано выше, в соответствии с первым вариантом осуществления часть 59 расчета эффективности очистки делит суммарное количество пыли на произведение количества движения и времени движения щетки 23 для пола для расчета эффективности очистки. Следовательно, что касается суммарного количества пыли, чем меньше количество движения или время движения щетки 23 для пола, тем выше рассчитанная эффективность очистки. Обычно, во время очистки одной и той же области очистки нет большого колебания в суммированном количестве пыли. Следовательно, вышеописанная рассчитанная эффективности очистки может быть показателем того, эффективно ли очищена область очистки.
Кроме того, часть 59 расчета эффективности очистки делит суммарное количество пыли на произведение времени приведения в действие и фактического времени всасывания электровентилятора 18 для расчета эффективности очистки. Следовательно, что касается суммарного количества пыли, чем меньше время приведения в действие или фактическое время всасывания электровентилятора 18, тем выше рассчитанная эффективность очистки. Следовательно, даже в случае, когда очистка осуществляется в случае отсоединенной щетки 23 для пола, вышеописанная рассчитанная эффективность очистки может быть показателем того, эффективно ли очищена область очистки.
Затем, будет описан второй вариант осуществления со ссылкой на фиг.8-10. Кроме того, подобные элементы и процессы, что и элементы и процессы в первом варианте осуществления, описанном выше, обозначены подобными ссылочными позициями, и их описание будет опущено.
В соответствии с данным вторым вариантом осуществления в вышеописанном первом варианте осуществления электропылесос 11 включает в себя устройство 71 определения (фиг.8), определяющее тип области очистки (площадь очистки).
В качестве устройства 71 определения используется датчик или ему подобное, определяющий тип области очистки посредством считывания подлежащего определению элемента (не показан), такого как штрих-код или обозначение интегральной схемы, который расположен в конкретном положении в каждой области очистки, такой как комната, во время прохождения через нее.
Кроме того, устройство 71 определения электрически соединено с частью 72 оценки области очистки, служащей в качестве части оценки блока 45 управления. Часть 72 оценки области очистки электрически соединена с частью 59 расчета эффективности очистки и оценивает тип области очистки, определенной устройством 71 определения, и выдает оцененный результат в часть 59 расчета эффективности очистки.
Кроме того, как и в последовательности операций, изображенной на фиг.9, между этапом 2 и этапом 3 блок 45 управления определяет тип области очистки при помощи устройства 71 определения для оценки типа (при помощи части 72 оценки области очистки) (этап 45). В результате, при первом управлении и втором управлении, соответственно, эффективность очистки или коэффициент эффективности работы отображается для каждого типа области очистки. Например, на фиг.10 эффективности очистки и коэффициенты эффективности работы соответствующих областей очистки отображаются с тем, чтобы быть расположенными вверх и вниз.
Таким образом, в соответствии со вторым вариантом осуществления эффективность очистки или коэффициент эффективности работы рассчитывается частью 59 расчета эффективности очистки для каждого типа области очистки, определенной устройством 71 определения, и рассчитанная эффективность очистки или коэффициент эффективности работы отображается на блоке 20 индикации, таким образом накапливая данные отдельно для каждой области очистки, что дает возможность более надежно оценивать и уведомлять об уровне эффективности очистки.
Кроме того, поскольку устройство 71 определения автоматически определяет тип области очистки, когда пользователь просто осуществляет очистку, работа ввода или ей подобное является необязательной, что повышает его удобство.
Кроме того, в вышеописанном втором варианте осуществления устройство 71 определения может определять, например, тип поверхности, подлежащей очистке, например, из покрытия пола, ковра, татами и подобной поверхности, подлежащей очистке, или может соответственно определять тип и область очистки поверхности, подлежащей очистке. Затем, та же самая работа и результат, что и во втором варианте осуществления, описанном выше, могут быть получены, так что эффективности очистки или коэффициенты эффективности работы отображаются на блоке 20 индикации для соответствия каждому, по меньшей мере, одному из этих определенных типов поверхностей, подлежащих очистке, и типов областей очистки.
Затем, будет описан третий вариант осуществления со ссылкой на фиг.11 и 12. Кроме того, подобные элементы и процессы, что и элементы и процессы в каждом варианте осуществления, описанном выше, обозначены подобными ссылочными позициями, и их описание будет опущено.
В соответствии с данным третьим вариантом осуществления в вышеописанном первом варианте осуществления электропылесос 11 включает в себя установочное устройство 75 (фиг.11), при помощи которого пользователь может вручную устанавливать тип области очистки (площади очистки).
Установочное устройство 75 расположено, например, на части 27 ручного управления или на верхней части кожуха 15 основного корпуса 12 пылесоса и электрически соединено с частью 51 оценки работы блока 45 управления. Часть 51 оценки работы оценивает соответствующие настройки установочных кнопок 38 и установочного устройства 75 и выдает результат настройки установочной кнопки 38 в часть 52 управления мощностью, а также выдает результат настройки установочного устройства 75 в часть 72 оценки области очистки. Часть 72 оценки области очистки оценивает тип области очистки, определенной установочным устройством 75, и обеспечивает выдачу оцененного результата в часть 59 расчета эффективности очистки. Например, в качестве установочного устройства 75 используются рабочие клавиши или им подобное, с помощью которых пользователь определяет обозначение, определенное для каждой области очистки, как, например, номер и т.д., для его ввода.
Затем, также как и в последовательности операций, изображенной на фиг.12, между этапом 2 и этапом 3 блок 45 управления оценивает тип поверхности, подлежащей очистке, введенный через установочное устройство 75 пользователем (при помощи части 51 оценки работы и части 72 оценки области очистки) (этап 47). В результате, при первом управлении и втором управлении, соответственно, таким же образом, что и во втором варианте осуществления, описанном выше, эффективность очистки или коэффициент эффективности работы отображается для каждого типа области очистки.
Таким образом, в соответствии с третьим вариантом осуществления эффективность очистки или коэффициент эффективности работы рассчитывается частью 59 расчета эффективности очистки для каждого типа области очистки, введенного установочным устройством 75, и рассчитанная эффективность очистки или коэффициент эффективности работы отображается на блоке 20 индикации, таким образом накапливая данные отдельно для каждой области очистки, что дает возможность более надежно оценивать и уведомлять об уровне эффективности очистки.
Кроме того, поскольку пользователь непосредственно вводит область очистки с помощью установочного устройства 75, можно более надежно оценивать область очистки.
Кроме того, в третьем варианте осуществления установочное устройство 75 может обеспечивать ввод типа поверхности, подлежащей очистке, например, которой является одно из покрытия пола, ковра, татами и подобной поверхности, подлежащей очистке, или может обеспечивать соответствующий ввод типа и области очистки поверхности, подлежащей очистке. Затем, те же самые работа и результат, что и в третьем варианте осуществления, описанном выше, могут быть получены, так что эффективности очистки или коэффициенты эффективности работы отображаются на блоке 20 индикации для соответствия каждому, по меньшей мере, одному из этих установленных типов поверхностей, подлежащих очистке, и типов областей очистки.
Кроме того, в соответствующих вариантах осуществления, описанных выше, обработки на этапе 16 и этапе 17 могут осуществляться до обработок на этапах 13-15, описанных выше. То есть, не имеет значения, в какой последовательности выполняются эти обработки на этапах 13-15 и обработки на этапе 16 и этапе 17.
Затем, в соответствии с, по меньшей мере, одним из вариантов осуществления, описанных выше, в положении, в котором щетка 23 для пола отсоединена от воздушного канала W, часть 59 расчета эффективности очистки рассчитывает эффективность очистки на основании времени приведения в действие электровентилятора 18, фактического времени всасывания, в течение которого количество пыли, большее или равное заданному количеству, установленному заранее, всасывается в воздушный канал W, и суммарного количества пыли, определенного оптическим датчиком 53. Следовательно, даже в случае, когда очистка выполняется в случае отсоединенной щетки 23 для пола, можно эффективно уведомлять пользователя об уровне выполнения очистки таким же образом, что и в случае, когда очистка выполняется с использованием щетки 23 для пола.
Кроме того, поскольку пользователь может определить уровень выполнения очистки в зависимости от эффективностей очистки и коэффициентов эффективности работы, описанных выше, для обеспечения удовлетворения сделанным можно не только исключить утомительный процесс очистки, но также можно способствовать повышению эффективности очистки, что дает возможность обеспечить экономию электроэнергии.
Затем, будет описан четвертый вариант осуществления со ссылкой на фиг.13-16. Кроме того, подобные элементы и процессы, что и элементы и процессы в каждом варианте осуществления, описанном выше, обозначены подобными ссылочными позициями, и их описание будет опущено.
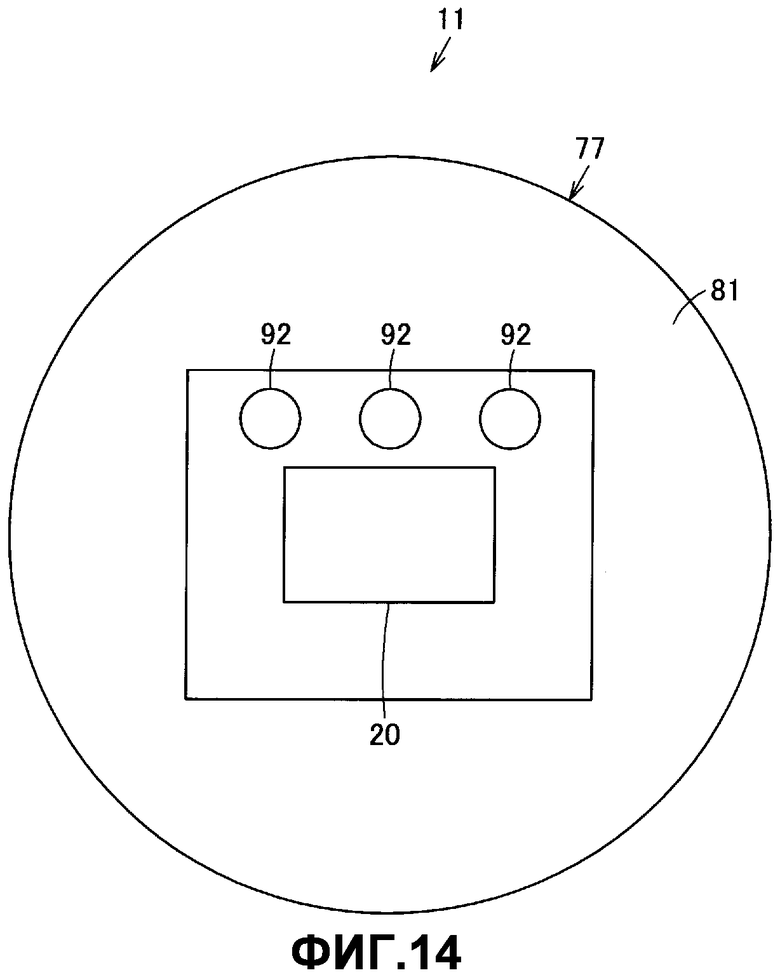
Электропылесосом 11 четвертого варианта осуществления является электропылесос так называемого роботизированного типа (типа автономного движения (автономного перемещения)), включающий в себя основной корпус 77 пылесоса, служащий в качестве всасывающей части, вместо основного корпуса 12 пылесоса, и элемент 13, образующий воздушный канал (щетка 23 для пола) соответствующих вариантов осуществления, описанных выше.
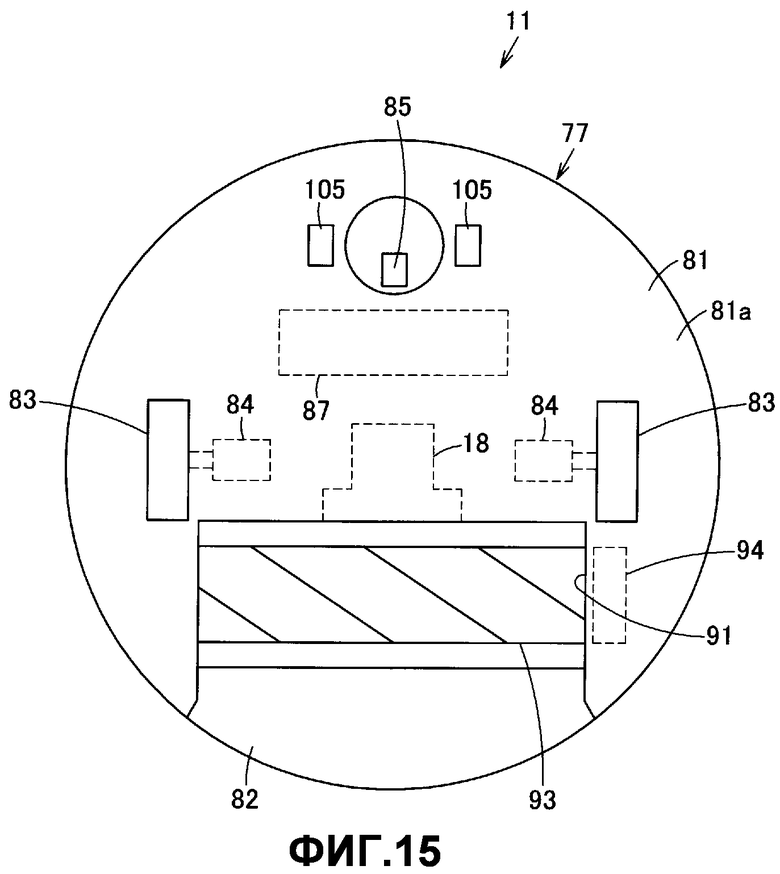
То есть, как показано на фиг.13-16, основной корпус 77 пылесоса включает в себя, например, полый кожух 81 основного корпуса, электровентилятор 18, размещенный в кожухе 81 основного корпуса, пылесборную часть 82, образованную в кожухе 81 основного корпуса, для сообщения со стороной всасывания электровентилятора 18, множество приводных колес 83, служащих в качестве приводной части, которая обеспечивает автономное перемещение основного корпуса 77 пылесоса, то есть для автономного перемещения, электродвигатель 84, служащий в качестве приводного устройства, которое приводит в движение эти приводные колеса 83, поворотное колесо 85, которое закреплено с возможностью поворота на нижнем участке кожуха 81 основного корпуса, множество датчиков 86, служащих в качестве измерительного устройства, закрепленного на кожухе 81 основного корпуса, блок 45 управления и вторичную батарею 87, которая является батареей, образующей часть источника питания. Кроме того, основной корпус 77 может быть дополнительно оснащен боковой щеткой или ей подобным, служащей в качестве поворотной очистительной части на нижнем участке кожуха 81 основного корпуса. Кроме того, относительно корпуса 77 пылесоса вертикальное направление на фиг.14 и 15, например, является продольным направлением.
Кожух 81 основного корпуса выполнен, например, из синтетической пластмассы или ей подобного и выполнен в форме плоской опоры (диска) или ей подобного, и всасывающее отверстие 91 в качестве пылесборного отверстия, которое является длинным в направлении ширины, длинным в поперечном направлении, открыто в центральной части в направлении ширины на стороне задней части кольцевой нижней поверхности 81a. Кроме того, блок 20 индикации, рабочая часть 92 и им подобное расположены, например, в центральной части верхней части кожуха 81 основного корпуса. Рабочая часть 92 предназначена для осуществления пользователем операции ввода с наружной стороны и состоит, например, из сенсорной панели или ей подобного.
Всасывающее отверстие 91 сообщается с пылесборной частью 82. Валообразная вращающаяся щетка 93 в качестве вращающегося очистительного элемента поддерживается в осевом направлении с возможностью вращения на всасывающем отверстии 91 и приводится во вращение поворотным электродвигателем 94 в качестве приводного устройства очистительного элемента, установленного в кожухе 81 основного корпуса.
Во вращающейся щетке 93, например, множество частей очистительного элемента выступает по спирали в радиальном направлении в форме стенки и закреплено на наружной периферийной поверхности длинной части вала. Нижняя сторона вращающейся щетки 93 выступает вниз из всасывающего отверстия 91 к нижней поверхности 81a кожуха 81 основного корпуса, и верхние концы частей очистительного элемента, расположенные на нижней стороне, в случае электропылесоса 11, находящегося на поверхности, подлежащей очистке, входят в контакт с поверхностью, подлежащей очистке.
Пылесборная часть 82 улавливает пыль, которая удаляется пылесосом через всасывающее отверстие 91 посредством приведения в действие электровентилятора 18. Пылесборная часть 82 может, например, улавливать пыль с пропусканием через фильтр с использованием, например, пылесборного мешка, такого как пачка бумаги или фильтр, или отделять и улавливать пыль за счет инерционной сепарации, такой как центробежная сепарация (циклонная сепарация) или линейная сепарация, и может быть образована произвольно. Кроме того, пылесборная часть 82 расположена на задней части кожуха 81 основного корпуса над всасывающим отверстием 91 и может удаляться из кожуха 81 основного корпуса. Кроме того, оптический датчик 53 расположен в положении между пылесборной частью 82 и всасывающим отверстием 91.
По меньшей мере, нижняя часть каждого приводного колеса 83 выступает вниз от нижней поверхности 81a кожуха 81 основного корпуса, входит в контакт с поверхностью, подлежащей очистке, в случае электропылесоса 11, расположенного на поверхности, подлежащей очистке, и может вращаться. Кроме того, приводные колеса 83 расположены, например, перед всасывающим отверстием 91 на обеих сторонах приблизительно центральной части кожуха 81 основного корпуса в продольном направлении и вращаются в продольном направлении.
Электродвигатели 84 расположены, чтобы, например, соответствовать приводным колесам 83, и могут соответственно приводить в независимое движение приводные колеса 83. Электродвигатель 84 может быть непосредственно соединен с каждым приводным колесом 83 или соединен с каждым приводным колесом 83 через устройство передачи (не показано), такое как шестерня или ремень.
Поворотное колесо 85 расположено приблизительно в центральной части кожуха 81 основного корпуса в направлении ширины перед кожухом 81 основного корпуса и является ведомым колесом, поворачиваемым вдоль поверхности, подлежащей очистке.
Кроме того, датчиком 86 является датчик дальности, например, ультразвуковой датчик или инфракрасный датчик, или контактный датчик, который непосредственно контактирует с препятствием, который может быть буфером или ему подобным. Датчик 86 расположен на переднем участке, боковом участке или нижнем участке основного корпуса 77 пылесоса (кожуха 81 основного корпуса) и обеспечивает соответственно определение присутствия или отсутствия препятствия (стенки) перед основным корпусом 77 пылесоса (кожухом 81 основного корпуса), препятствия сбоку или препятствия (ступень) на нижнем участке и расстояния между этими препятствиями и основным корпусом 77 пылесоса (кожухом 81 основного корпуса).
Кроме того, блок 45 управления электрически соединен с электровентилятором 18, поворотным электродвигателем 94, соответствующими электродвигателями 84, датчиком 86 и обеспечивает управление приведением в действие электровентилятора 18, поворотного электродвигателя 94, соответствующих электродвигателей 84 на основании результатов, определенных датчиком 86. Кроме того, множество режимов очистки электропылесоса 11 установлено в блоке 45 управления, и эти режимы очистки могут выбираться пользователем при помощи внешнего входного устройства рабочей части 92. В качестве этих режимов очистки сохранены заранее, например, режим нормальной очистки, который является основным режимом очистки, в котором вся область очистки очищается при автономном движении (автономном перемещении), режим тщательной очистки, который является интенсивным режимом очистки, в котором вся область очистки очищается несколько раз, например, два раза при автономном движении (автономном перемещении), режим частичной очистки, в котором очищается только заданное место области очистки, которое является пятном. Кроме того, в режиме тщательной очистки очистка может осуществляться более эффективно, так что траектория движения (перемещения) электропылесоса 11 (основного корпуса 77 пылесоса) может изменяться в направлении, в котором траектории, например, могут пересекаться (перпендикулярно к) друг с другом при каждом разе очистки (первый раз очистка и второй раз очистка).
Кроме того, блок 45 управления включает в себя в дополнение к части 52 управления мощностью, части 54 обработки данных, части 55 суммирования количества пыли, части 56 суммирования времени приведения в действие, части 57 суммирования количества/времени движения, части 58 суммирования времени всасывания, части 59 расчета эффективности очистки, части 60 управления индикатором, части 69 хранения данных, которые описаны выше, часть 96 оценки работы, электрически соединенную с рабочей частью 92, часть 97 управления поворотным электродвигателем, служащую в качестве части управления приводным устройством очистительного элемента, которая управляет работой поворотного электродвигателя 94, часть 98 управления перемещением, служащую в качестве части управления движением, которая управляет движением (перемещением) электропылесоса 11 (основного корпуса 77 пылесоса) посредством управления работами соответствующих электродвигателей 84, и часть 99 обработки перемещения, электрически соединенную с датчиком 86. Кроме того, соответствующие части, составляющие блок 45 управления, соответственно, могут быть выполнены как одно целое или быть отдельными элементами, и, например, могут быть расположены в произвольных положениях, например, во внутренней части кожуха 15 основного корпуса 12 пылесоса.
Часть 96 оценки работы предназначена для оценки работы рабочей части 92 для установки режима очистки относительно части 52 управления мощностью, части 97 управления поворотным электродвигателем и части 98 управления перемещением.
Кроме того, часть 97 управления поворотным электродвигателем может регулировать, например, угол сдвига фаз поворотного электродвигателя 94 с помощью элемента управления (не показан) в соответствии с режимом очистки, установленным частью 96 оценки работы.
Кроме того, часть 57 суммирования количества/времени движения электрически соединена с частью 97 управления поворотным электродвигателем, например, и является датчиком, служащим в качестве устройства определения числа оборотов, которое определяет число оборотов или скорость вращения поворотного электродвигателя 94 (приводных колес 83), приводимого в действие частью 97 управления поворотным электродвигателем в положении размещения на поверхности, подлежащей очистке, чтобы можно было определить скорость движения и расстояние электропылесоса 11 (основного корпуса 77 пылесоса). Затем, часть 57 суммирования количества/времени движения суммирует измеренную скорость движения и расстояние электропылесоса 11 (основного корпуса 77 пылесоса) для расчета количества движения по поверхности, подлежащей очистке, электропылесоса 11 (основного корпуса 77 пылесоса) и расчета времени движения по поверхности, подлежащей очистке, электропылесоса 11 (основного корпуса 77 пылесоса). Кроме того, можно определить, расположены ли соответствующие приводные колеса 83 на поверхности, подлежащей очистке, посредством измерения величины тока нагрузки поворотного электродвигателя 94, например, или посредством отдельного обеспечения части определения размещения на нижней поверхности 81a кожуха 81 основного корпуса.
Кроме того, часть 59 расчета эффективности очистки предназначена для расчета эффективности очистки на основании суммарного количества пыли, рассчитанного частью 55 суммирования количества пыли, количества движения и времени движения по поверхности, подлежащей очистке, электропылесоса 11 (основного корпуса 77 пылесоса), которые рассчитываются частью 57 суммирования количества/времени движения, времени приведения в действие электровентилятора 18, рассчитанного частью 56 суммирования времени приведения в действие, и времени всасывания, рассчитанного частью 58 суммирования времени всасывания.
Кроме того, вторичная батарея 87 предназначена для подачи питания на блок 45 управления, электровентилятор 18, поворотный электродвигатель 94, соответствующие электродвигатели 84, датчик 86. Вторичная батарея 87 расположена, например, в положении за поворотным колесом 85. Затем, вторичная батарея 87 электрически соединена с клеммами 101 и 101 для подзарядки, расположенными на нижней поверхности 81a кожуха 81 основного корпуса на обеих сторонах поворотного колеса 85. Когда клеммы 101 и 101 для подзарядки соединены с заданным зарядным столом (не показан), установленным в заданном положении или внутри помещения (комнате), например, можно заряжать вторичную батарею 87.
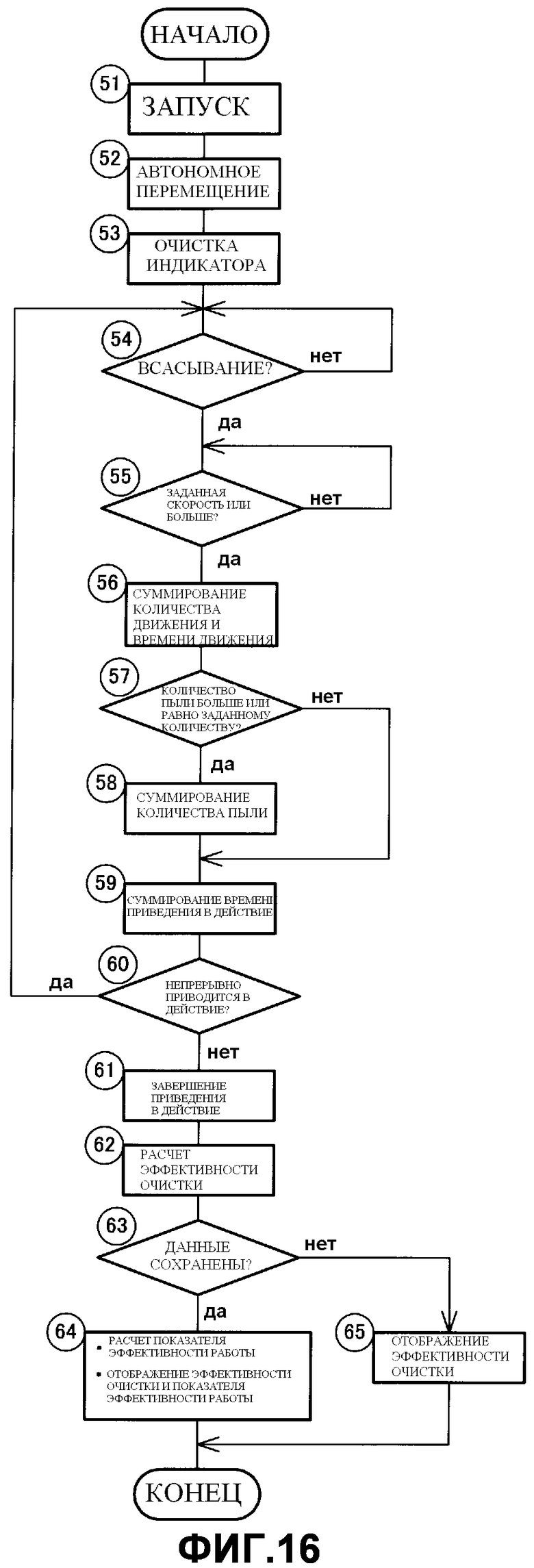
Затем, также будет описана работа четвертого варианта осуществления со ссылкой на последовательность операций на фиг.16.
Когда электропылесос 11 приведен в состояние запуска в положении, в котором пользователь включил выключатель электропитания (не показан), или в случае, когда он достигает заданного времени, установленного заранее в положении, в котором выключатель электропитания был включен, блок 45 управления включает электровентилятор 18 в установленном режиме очистки (при помощи части 52 управления мощностью) (этап 51) и приводит в движение приводные колеса 83 и 83 посредством приведения в действие электродвигателей 84 и 84 (при помощи части 98 управления перемещением) при обработки данных, таких как расстояния от препятствий, обнаруженных датчиком 86 (при помощи части 99 обработки перемещения), для принудительного автономного движения (автономного перемещения) электропылесоса 11 (основного корпуса 77 пылесоса) в соответствии с установленным режимом очистки (этап 52).
Затем, блок 45 управления очищает индикатор на блоке 20 индикации (при помощи части 60 управления индикатором) (этап 53), и блок 45 управления определяет, всасывает ли электропылесос 11 должным образом воздух, другими словами, работает ли электровентилятор 18 (этап 54).
На этапе 54 в случае, когда блок 45 управления определяет, что электровентилятор 18 не работает, например, случай, когда электропылесос 11 не всасывает воздух вследствие засорения и т.д. пылесборной части 82, или случай, когда всасывающее отверстие 91 заблокировано инородным веществом, процесс возвращается к этапу 54. В случае, когда блок 45 управления определяет, что электровентилятор 18 работает, блок 45 управления определяет, движется ли электропылесос 11 (основной корпус 77 пылесоса) со скоростью, большей или равной заданной скорости, установленной заранее (при помощи части 68 определения количества движения) (этап 55). Кроме того, пыль, всасываемая вместе с воздухом из всасывающего отверстия 91 посредством приведения в действие электровентилятора 18, улавливается в пылесборной части 82. Воздух, с которым пыль улавливается, всасывается в электровентилятор 18 для выпуска из электровентилятора 18 при охлаждении электровентилятора, для выпуска на наружную сторону кожуха 81 основного корпуса 77 пылесоса.
Затем, на этапе 55 в случае, когда блок 45 управления определяет, что электропылесос 11 (основной корпус 77 пылесоса) не перемещается со скоростью, большей или равной заданной скорости, установленной заранее, процесс возвращается к этапу 55 (или этапу 54), и в случае, когда блок 45 управления определяет, что электропылесос 11 (основной корпус 77 пылесоса) перемещается со скоростью, большей или равной заданной скорости, установленной заранее, блок 45 управления суммирует количество движения и время движения по поверхности, подлежащей очистке, электропылесоса 11 (основного корпуса 77 пылесоса) (при помощи части 57 суммирования количества/времени движения) (этап 56).
Затем, блок 45 управления определяет, является ли большим или равным количество пыли, определенное оптическим датчиком 53, заданному количеству, установленному заранее (этап 57). На этапе 57 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, больше или равно заданному количеству, установленному заранее, блок 45 управления суммирует количество пыли (при помощи части 55 суммирования количества пыли) (этап 58) и суммирует время приведения в действие электровентилятора 18 (при помощи части 56 суммирования времени приведения в движение) (этап 59). Кроме того, на этапе 57 в случае, когда блок 45 управления определяет, что количество пыли, определенное оптическим датчиком 53, не больше или не равно заданному количеству, установленному заранее, процесс непосредственно переходит к этапу 59.
Затем, блок 45 управления определяет, приводится ли непрерывно в действие электропылесос 11 (электровентилятор 18) (этап 60), и в случае, когда блок 45 управления определяет, что электропылесос 11 (электровентилятор 18) непрерывно приводится в действие, процесс возвращается к этапу 54. Кроме того, на этапе 60 в случае, когда блок 45 управления определяет, что приведение в действие завершено, блок 45 управления выключает электровентилятор 18 и перемещает электропылесос 11 (основной корпус 77 пылесоса) к зарядному столу, и завершает очистку в положении, в котором выводы 101 и 101 для подзарядки соединены с зарядным столом (этап 61). Затем, блок 45 управления рассчитывает эффективность очистки при помощи части 59 расчета эффективности очистки на основании количества движения и времени движения по поверхности, подлежащей очистке, электропылесоса 11 (основного корпуса 77 пылесоса), суммированных на этапе 56, и суммарного количества пыли, суммированного на этапе 58 (этап 62). Поскольку способ расчета эффективности очистки на этапе 62 является таким же, что и способ на вышеописанном этапе 19, описание будет опущено. После этого блок 45 управления определяет, сохранено ли среднее значение в части 69 хранения данных (этап 63). На этапе 63 в случае, когда блок 45 управления определяет, что среднее значение сохранено в части 69 хранения данных, блок 45 управления рассчитывает коэффициент эффективности работы при помощи части 59 расчета эффективности очистки и управляет блоком 20 индикации (при помощи части 60 управления индикатором) для отображения коэффициента эффективности работы вместе с эффективностью очистки (этап 64). Поскольку способ расчета показателя эффективности работы на этапе 64 является таким же, что и способ на вышеописанном этапе 21, описание будет опущено. С другой стороны, на этапе 63 в случае, когда блок 45 управления определяет, что среднее значение не сохранено в части 69 хранения данных, блок 45 управления управляет блоком 20 индикации (при помощи части 60 управления индикатором) для отображения только эффективности очистки (этап 65).
Таким образом, в соответствии с четвертым вариантом осуществления часть 59 расчета эффективности очистки делит суммарное количество пыли на произведение количества движения и времени движения основного корпуса 77 пылесоса для расчета эффективности очистки. Следовательно, что касается суммарного количества пыли, чем меньше количество движения или время движения основного корпуса 77 пылесоса, тем выше рассчитанная эффективность очистки. Обычно, во время очистки одной и той же области очистки не наблюдается большое колебание суммарного количества пыли. Следовательно, вышеописанная рассчитанная эффективность очистки может быть показателем того, эффективно ли очищена область очистки.
Кроме того, поскольку можно определить уровень выполнения очистки в зависимости от эффективностей очистки и коэффициентов эффективности работы, описанных выше, можно побудить пользователя повысить эффективность очистки посредством изменения установки режима очистки, что дает возможность обеспечить экономию электроэнергии. То есть, в случае, когда эффективность очистки, например, в режиме тщательной очистки является относительно низкой, или в случае, когда эффективность очистки в режиме нормальной очистки является относительно низкой, можно определить, что расстояние при автономном движении основного корпуса 77 пылесоса является неэффективным. Следовательно, можно увеличить эффективность очистки посредством изменения установки режима очистки, например, посредством установки в режим нормальной очистки или посредством установки в режим частичной очистки, и можно выбрать соответствующий режим очистки.
Кроме того, в четвертом варианте осуществления, описанном выше, режим очистки может не только выбираться из режимов, сохраненных заранее, но также, например, устанавливаться произвольно пользователем. Кроме того, не только установка траектории движения (перемещения) основного корпуса 77 пылесоса, но также установка и т.д. входных данных (рабочего режима) электровентилятора 18 могут быть включены в установку режима очистки.
Кроме того, таким же образом, что и во втором и третьем вариантах осуществления, настоящее изобретение может быть осуществлено таким образом, что тип области очистки (площади очистки) определяется автоматически или вводится вручную пользователем для расчета эффективности очистки или коэффициента эффективности работы для каждого типа области очистки при помощи части 59 расчета эффективности очистки, и рассчитанная эффективность очистки или коэффициент эффективности работы могут отображаться на блоке 20 индикации. В этом случае также могут быть получены те же самые работа и результат, что и во втором и третьем вариантах осуществления, описанных выше.
Кроме того, исполнение, при котором электропылесос 11 (основной корпус 77 пылесоса) движется автоматически (перемещается автоматически), может включать в себя не только исполнение, при котором электропылесос 11 (основной корпус 77 пылесоса) движется (перемещается) при обнаружении препятствия датчиком 86, но также исполнение (самоходное исполнение), при котором электропылесос 11 (основной корпус 77 пылесоса) движется автоматически (перемещается), например, по траектории движения (перемещения), установленной заранее.
Кроме того, электропылесос 11 (основной корпус 77 пылесоса), движущийся автоматически (перемещающийся автоматически), может вручную приводиться в действие за счет использования удаленного контроллера.
Затем, в соответствии с, по меньшей мере, одним из вариантов осуществления, описанных выше, эффективность очистки рассчитывается при помощи части 59 расчета эффективности очистки на основании суммарного количества пыли, измеренной оптическим датчиком 53, количества движения по поверхности, подлежащей очистке, щетки 23 для пола или основного корпуса 77 пылесоса и времени движения по поверхности, подлежащей очистке, щетки 23 для пола или основного корпуса 77 пылесоса, и рассчитанная эффективность очистки отображается на блоке 20 индикации, таким образом, можно эффективно уведомлять пользователя об уровне выполнения очистки в зависимости от этой эффективности очистки.
Кроме того, когда имеется среднее значение предыдущих нескольких эффективностей очистки при очистке, сохраненных в части 69 хранения данных, или эффективностей очистки и т.д., при очистке в течение определенного прошлого периода, часть 59 расчета эффективности очистки делит эффективности очистки на среднее значение для расчета коэффициента эффективности работы, и рассчитанный коэффициент эффективности работы отображается на блоке 20 индикации, таким образом, можно позволить пользователю понять, повышена ли эффективность очистки по сравнению с эффективностью очистки при прошлой очистке, что дает возможность более эффективно уведомлять пользователя об уровне выполнения очистки.
Кроме того, в соответствующих вариантах осуществления блок 20 индикации отображает эффективности очистки и коэффициенты эффективности работы во время очистки соответственно в реальном времени. Однако блок 20 индикации может быть выполнен с возможностью отображения их при завершении очистки, т.е. при выключении электровентилятора 18 (электропылесоса 11).
Кроме того, в качестве устройства уведомления могут использоваться не только блок 20 индикации, который отображает визуально, но также устройство уведомления, которое акустически уведомляет с помощью звука, например, или их сочетание и т.д.
Кроме того, блок 45 управления может автоматически управлять запуском электродвигателей электровентилятора 18 или щетки 23 для пола для соответствия количеству пыли, определенному оптическим датчиком 53.
Затем, большая или малая величина количества пыли, определенная оптическим датчиком 53, может отображаться на блоке 20 индикации и т.д. во время приведения в действие электровентилятора 18.
Кроме того, электропылесос 11 не ограничивается контейнерным типом или роботизированным типом, и могут использоваться вертикальный тип со щеткой 23 для пола, соединенной с нижним участком основного корпуса 12 пылесоса, или ручной тип.
Хотя были описаны конкретные варианты осуществления, эти варианты осуществления представлены только в качестве примера и не предназначены для ограничения объема настоящего изобретения. Фактически, новые способы и системы, описанные в данном документе, могут быть воплощены во множестве других форм. Кроме того, различные исключения, замены и изменения формы способов и систем, описанных в данном документе, возможны без отхода от сущности настоящих изобретений. Сопроводительная формула изобретения и ее эквиваленты предназначены для охвата таких форм или модификаций, которые будут входить в объем и сущность настоящих изобретений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПЫЛЕСОС | 2011 |
|
RU2504324C1 |
| ЭЛЕКТРОПЫЛЕСОС | 2009 |
|
RU2498761C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2454917C1 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2486858C1 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2433779C1 |
| ЭЛЕКТРОПЫЛЕСОС И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2429777C1 |
| КОРПУС С ВСАСЫВАЮЩИМ ОТВЕРСТИЕМ И ЭЛЕКТРОПЫЛЕСОС | 2010 |
|
RU2498762C2 |
| ПЫЛЕСБОРНОЕ УСТРОЙСТВО И ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2010 |
|
RU2433778C1 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС (ВАРИАНТЫ) | 2007 |
|
RU2359604C2 |
| ЭЛЕКТРОПЫЛЕСОС | 2009 |
|
RU2430673C1 |
Электропылесос включает в себя основной корпус пылесоса, вмещающий электровентилятор (18). Электропылесос включает в себя воздушный канал, сообщающийся со стороной всасывания электровентилятора (18). Электропылесос включает в себя щетку (23) для пола, которая перемещается по поверхности, подлежащей очистке, и отделяет часть воздушного канала. Электропылесос включает в себя оптический датчик (53), который определяет количество пыли, проходящее через внутреннюю часть воздушного канала посредством приведения в действие электровентилятора (18). Электропылесос включает в себя часть (59) расчета эффективности очистки, которая рассчитывает эффективность очистки на основании суммарного количества пыли, определенного оптическим датчиком (53), количества движения по поверхности, подлежащей очистке, щетки (23) для пола и времени движения по поверхности, подлежащей очистке, щетки (23) для пола. Электропылесос включает в себя блок (20) индикации, который обеспечивает отображение эффективности очистки, рассчитанной частью (59) расчета эффективности очистки. 5 з.п. ф-лы, 16 ил.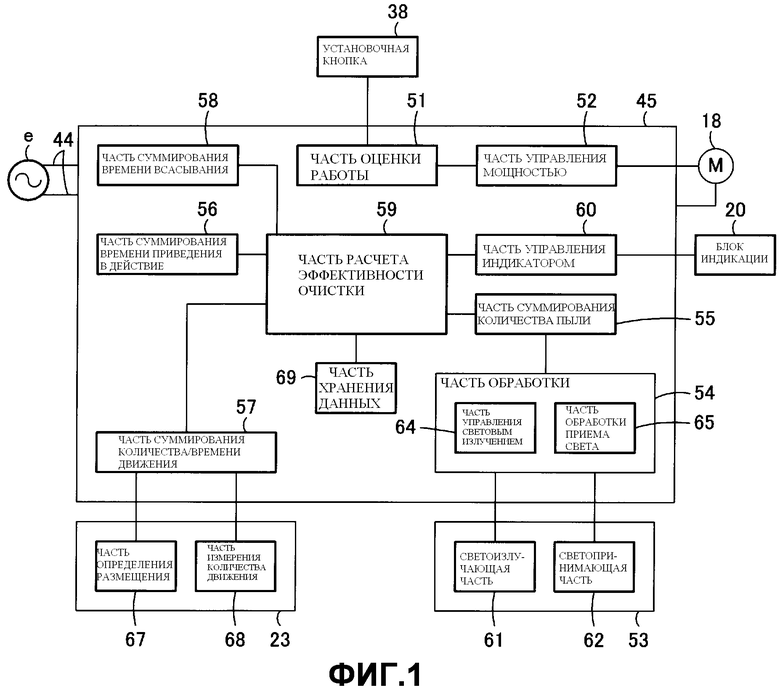
1. Электропылесос, содержащий основной корпус пылесоса, вмещающий электровентилятор, воздушный канал, сообщающийся со стороной всасывания электровентилятора, всасывающую часть, перемещаемую по поверхности, подлежащей очистке, причем всасывающая часть отделяет часть воздушного канала, устройство для определения количества пыли, которое определяет количество пыли, проходящей через внутреннюю часть воздушного канала посредством приведения в действие электровентилятора, расчетное устройство, которое рассчитывает эффективность очистки на основании суммарного количества пыли, определенного устройством для определения количества пыли, количества движения по поверхности, подлежащей очистке, всасывающей части и времени движения по поверхности, подлежащей очистке, всасывающей части, и устройство уведомления, которое обеспечивает уведомление об эффективности очистки, рассчитанной расчетным устройством.
2. Электропылесос по п.1, в котором всасывающей частью является основной корпус пылесоса, автоматически перемещающийся по поверхности, подлежащей очистке.
3. Электропылесос по п.1, в котором всасывающей частью является элемент с всасывающим отверстием, который является отдельным элементом от основного корпуса пылесоса, который отделяет часть воздушного канала и способен перемещаться по поверхности, подлежащей очистке.
4. Электропылесос по п.3, в котором элемент с всасывающим отверстием выполнен с возможностью отсоединения от воздушного канала, и в положении, в котором элемент с всасывающим отверстием отсоединен от воздушного канала, расчетное устройство рассчитывает эффективность очистки на основании времени приведения в действие электровентилятора, времени всасывания, в течение которого количество пыли, большее или равное заданному количеству, установленному заранее, всасывается в воздушный канал, и суммарного количества пыли, определенного устройством для определения количества пыли.
5. Электропылесос по п.1, дополнительно содержащий устройство определения, которое обеспечивает определение по меньшей мере одного из типа поверхности, подлежащей очистке, и типа области очистки, причем расчетное устройство рассчитывает эффективности очистки для соответствия каждому по меньшей мере одному из типа поверхности, подлежащей очистке, и типа области очистки, который определен устройством определения, и устройство уведомления обеспечивает уведомление о соответствующих эффективностях очистки, рассчитанных расчетным устройством.
6. Электропылесос по п.1, дополнительно содержащий установочное устройство, которое обеспечивает установку по меньшей мере одного из типа поверхности, подлежащей очистке, и типа области очистки, причем
расчетное устройство рассчитывает эффективности очистки для соответствия каждому по меньшей мере одному из типа поверхности, подлежащей очистке, и типа области очистки, который установлен установочным устройством, и устройство уведомления обеспечивает уведомление о соответствующих эффективностях очистки, рассчитанных расчетным устройством.

