Область изобретения
Настоящее изобретение относится к электрическому пылесосу, который автономно перемещается и чистит поверхность, подлежащую очистке.
Предшествующий уровень техники
Известны, например, электрические пылесосы, которые автоматически перемещаются и чистят поверхность пола, обнаруживая препятствия с помощью датчиков и пр. В таком электрическом пылесосе всасывающий порт сформирован в нижней части кожуха основного корпуса, в котором расположен электрический вентилятор и который содержит пылесборник, а ведущие колеса прикреплены с обеих сторон от всасывающего порта или подобного отверстия. Поэтому нельзя установить всасывающий порт на обеих сторонах в соответствии с ведущими колесами, и возникают трудности с всасыванием пыли, находящейся на полу по бокам кожуха основного корпуса. Потому известна конструкция, в которой на обеих сторонах нижней части кожуха основного корпуса устанавливают боковые щетки, являющиеся вращающимися чистящими деталями, которые сметают пыль к всасывающему порту.
Однако поскольку боковые щетки выступают вниз относительно кожуха основного корпуса, существует возможность того, что боковые щетки будут цепляться, например, за перепады высот, создаваемые, например ковром, уложенным на поверхность пола, например, на напольное покрытие, и электрический пылесос такой конструкции не сможет продолжать движение (застрянет).
Перечень ссылок
Патентная литература
Патентный источник 1 - Японская выложенная патентная публикация № 2006-106816
Патентный источник 2 - Японская выложенная патентная публикация № 6-125861
Патентный источник 3 - Японская выложенная патентная публикация № 7-322977
Краткое описание изобретения
Техническая задача
Целью настоящего изобретения является создание электрического пылесоса, который может предотвратить возникновение случаев, когда электрический пылесос не может продолжать движение из-за того, что вращающаяся чистящая деталь зацепилась за препятствие на очищаемой поверхности.
Решение задачи
Электрический пылесос по варианту настоящего изобретения автономно движется по поверхности и очищает ее. Электрический пылесос содержит: основной корпус; порт для сбора пыли, расположенный в нижней части основного корпуса; вращающуюся чистящую деталь, которая содержит чистящий элемент, опущенный на очищаемую поверхность и расположенный перед портом для сбора пыли так, чтобы вращаться на очищаемой поверхности; узел обнаружения препятствий, мешающих автономному движению, расположенный под основным корпусом; и управляющее устройство, заставляющее вращающуюся чистящую деталь подниматься вверх, когда узел обнаружения препятствий обнаружит под основным корпусом препятствие, мешающее автономному движению.
Краткое описание чертежей
Фиг.1(а)-(с) - пояснительные виды сбоку, иллюстрирующие последовательные состояния, когда вращающаяся чистящая деталь электрического пылесоса по настоящему изобретению поднимается вверх.
Фиг.2 - вид сбоку того же электрического пылесоса.
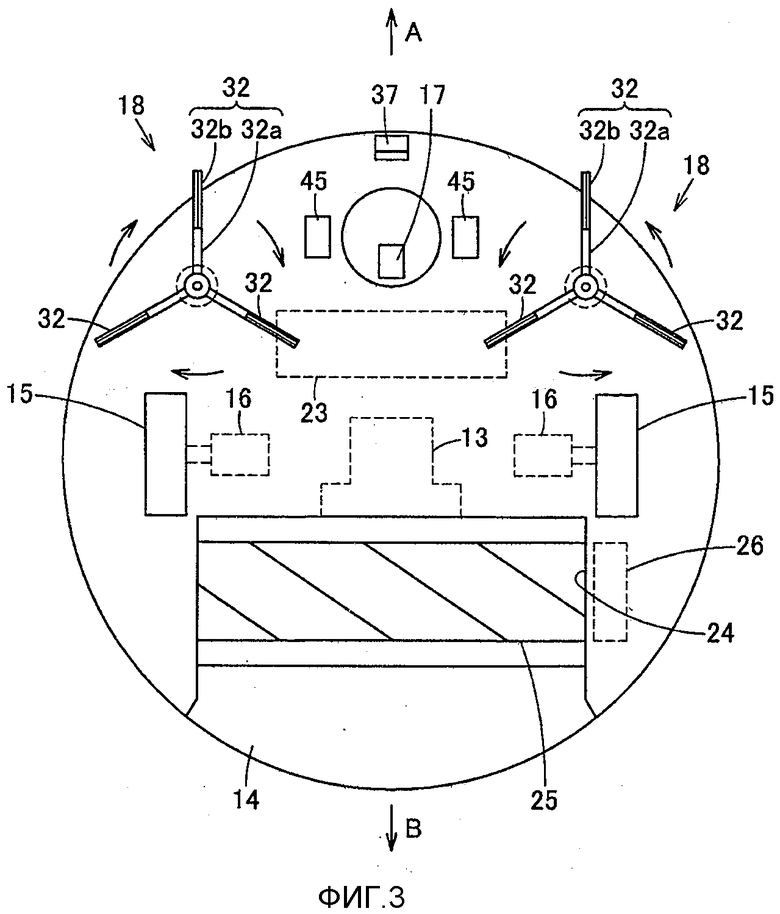
Фиг.3 - вид снизу того же электрического пылесоса.
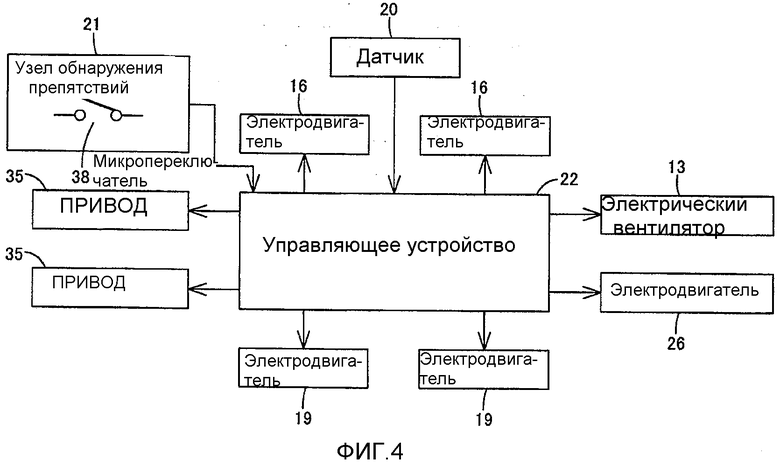
Фиг.4 - блок-схема, иллюстрирующая тот же электрический пылесос.
Подробное описание варианта
Далее со ссылками на фиг.1-4 следует описание варианта настоящего изобретения.
На фиг.2 и 3 позицией 11 обозначен электрический пылесос. В описании настоящего изобретения электрический пылесос 11 представляет так называемый самодвижущийся робот-пылесос, который автономно (самостоятельно) движется по поверхности F и очищает ее.
Электрический пылесос 11 содержит: пустотелый основной корпус 12, электрический вентилятор 13, расположенный в основном корпусе 12; пылесборник 14, сообщающийся с всасывающей стороной вентилятора 13 и расположенный в основном корпусе 12; например, множество ведущих колес 15, являющихся движителями для автономного перемещения электрического пылесоса 11; электродвигатели 16, приводящие в движение ведущие колеса 15; поворотное колесо 17, прикрепленное с возможностью поворота к нижней части основного корпуса 12; например, пару боковых щеток 18, являющихся вращающимися чистящими деталями, прикрепленными к нижней части основного корпуса 12 с возможностью вращения по поверхности F пола; приводные электродвигатели 19 для привода во вращение боковых щеток 18; множество датчиков 20, образующих узел детектора и прикрепленных к нижней части основного корпуса 12; управляющее устройство 22, содержащее печатные платы и пр.; и вторичный аккумулятор 23, служащий источником питания.
Кроме того, в дальнейшем описании предполагается, что направление движения электрического пылесоса 11 (основного корпуса 12) является продольным направлением (показанным стрелками А и В на фиг.3), а также предполагается, что боковое направление (направления в обе стороны), ортогональное продольному направлению, является направлением ширины.
Основной корпус 12 изготовлен, например, из синтетической смолы и имеет форму плоской колонны (диска) или подобную форму, и в центральной части в направлении ширины на задней стороне круглой нижней поверхности 12а имеет всасывающий порт 24 для сбора пыли, который вытянут в направлении ширины. Дополнительно, на верхней части основного корпуса 12 установлены различные панели управления, дисплей и пр. (не показаны).
Всасывающий порт 24 сообщается с пылесборником 14. На всасывающем порте 24 установлена с возможностью вращения вокруг своей оси имеющая форму вала вращающаяся щетка 25, являющаяся вращающимся чистящим телом и приводимая во вращение электродвигателем 26, являющимся приводом этого чистящего тела и установленным в основном корпусе 12.
Во вращающейся щетке 25, например, множество частей чистящего тела радиально и спирально выступают в форме стенки и прикреплены к внешней периферийной поверхности детали в форме длинного вала. Нижняя сторона вращающейся щетки 25 выступает вниз от всасывающего порта 24 к нижней поверхности 12а основного корпуса 12, а концы частей чистящего тела, расположенные на нижней стороне, когда электрический пылесос 11 уложен на поверхность F пола, входят в контакт с поверхностью F пола.
Пылесборник 14 задерживает пыль, засасываемую через всасывающий порт 24 электрическим вентилятором 13. Пылесборник 14 может быть, например, фильтрующим пылесборником, который задерживает пыль, например, с помощью мешка для сбора пыли, например бумажного мешка, или с помощью фильтра; или пылесборник 14 может отделять и захватывать пыль за счет инерционной сепарации, например центробежной сепарации (циклонной сепарации), или линейной сепарации и имеет произвольную конструкцию. Дополнительно, пылесборник 14 расположен в задней части основного корпуса 12 над всасывающим портом 24 и может отсоединяться от основного корпуса 12.
По меньшей мере нижняя часть каждого ведущего колеса 15 выступает вниз от нижней поверхности 12а основного корпуса 12, контактирует с поверхностью F пола, когда электрический пылесос уложен на поверхность F пола, и вращается. Дополнительно, ведущие колеса 15 расположены, например, перед всасывающим портом 24 на обеих сторонах приблизительно центральной части основного корпуса 12 в продольном направлении и могут вращаться в продольном направлении.
Электродвигатели 16 расположены так, чтобы, например, соответствовать ведущим колесам 15 и приводить ведущие колеса 15 во вращение независимо друг от друга. Электродвигатель 16 может быть непосредственно соединен с каждым ведущим колесом 15 или соединяться с каждым ведущим колесом 15 через устройство трансмиссии (не показано), такое как шестерня или ремень.
Поворотное колесо 17 расположено приблизительно в центре основного корпуса 12 в направлении ширины в передней части основного корпуса 12 и является ведомым колесом, поворачивающимся на поверхности F пола.
Каждая боковая щетка 18 имеет дисковидное основание 31 щетки, которое является центральной вращающейся деталью, и, например, три чистящих элемента 32, которые радиально отходят от основания 31 щетки и наклонены к поверхности F пола. Боковые щетки 18 прикреплены к нижней поверхности 12а основного корпуса 12 так, чтобы основания 31 щеток, каждое из которых является центром вращения, располагались перед всасывающим портом 24, и приводными колесами 15, и с обеих сторон от поворотного колеса 17 и позади него.
Три чистящих элемента 32 разнесены на приблизительно равные интервалы друг от друга по окружности каждого основания 31 щетки. Кроме того, можно использовать, например, четыре или более чистящих элемента 32.
Каждый чистящий элемент 32 содержит стержень 32а, радиально выступающий от основания 32 щетки, и множество щетинок 32b, являющихся чистящими деталями, расположенными на конце стержня 32а. Щетинки 32b щетки изготовлены из синтетической смолы или подобного материала и имеют меньшую толщину, чем стержень 32а. В настоящем изобретении по меньшей мере концы стержней рядом с щетинками 32b каждой щетки 32 упруго контактируют с поверхностью F пола, когда электрический пылесос 11 уложен на поверхность F пола.
С каждым основанием 31 боковых щеток соединен выступающий вниз вращающийся вал каждого электродвигателя 19, и электродвигатели 19 могут соответственно вращать боковые щетки 18 к центральной части основного корпуса 12 в направлении ширины, т.е. вращать правую боковую щетку 18 против часовой стрелки, а левую боковую щетку 18 по часовой стрелке, чтобы каждая боковая щетка 18 сметала пыль в сторону всасывающего порта 24. Верхняя часть каждого электродвигателя 19 шарнирно прикреплена к основному корпусу 12 так, чтобы электродвигатель 19 мог поворачиваться интегрально с боковой щеткой 18 в продольном направлении (в вертикальном направлении). Конец телескопического привода 35 соединен со средней частью (в вертикальном направлении) каждого электродвигателя 19. Привод 35 является, например, электрическим цилиндром, конец базовой стороны которого шарнирно прикреплен к основному корпусу 12 с возможностью поворота в вертикальной плоскости, а рабочий конец установлен на оси на электродвигателе 19, чтобы поворачивать его в вертикальной плоскости.
Датчик 20, например, является дальномером, например ультразвуковым или инфракрасным датчиком, или контактным датчиком, который работает как бампер, входя в непосредственный контакт с препятствием. Датчик 20 расположен на передней части, боковой части или нижней части основного корпуса 12, и может обнаруживать препятствие (стену) перед основным корпусом и по бокам от него или препятствие (перепад уровня) под основным корпусом 12, и может измерять расстояние между основным корпусом 12 и препятствием.
Узел 21 обнаружения препятствий определяет, находится ли препятствие, мешающее автономному движению, например мат R, ковер или циновка, под основным корпусом 12. Хотя узел 21 обнаружения препятствий может иметь произвольную конструкцию, в настоящем варианте, как показано на фиг.1 и 2, он содержит поворотный элемент 37 в форме рычага, расположенный на нижней поверхности 12а основного корпуса 12, и микропереключатель 38, расположенный за поворотным элементом 37 на основном корпусе 12 перед поворотным колесом 17 в центре основного корпуса в направлении ширины.
Поворотный элемент 37 является деталью, определяющей наличие препятствия (наличие мата), и установлен с возможностью поворота в продольном направлении относительно основного корпуса 12, и имеет выступающую часть 37а, расположенную сзади на стороне микропереключателя 38. Поворотный элемент 37 установлен перед основанием 31 и концом (в форме щетинок 32b щетки) чистящего элемента 32, который расположен на самом конце каждой боковой щетки 18, и нижний рабочий конец поворотного элемента 37 в нормальном (ненагруженном) состоянии выступает вниз от нижней поверхности 12а основного корпуса 12. Расстояние, на которое выступает нижний рабочий конец поворотного элемента 37 от нижней поверхности 12а основного корпуса 12, задано так, чтобы превышать расстояние, на которое основание 31 каждой боковой щетки 18 выступает от нижней поверхности 12а основного корпуса 12, а чувствительность узла 21 обнаружения препятствий задана в соответствии с расстоянием, на которое нижний конец поворотного элемента 37 выступает от нижней поверхности 12а основного корпуса 12. То есть, если расстояние, на которое нижний конец поворотного элемента 37 выступает от нижней поверхности 12а основного корпуса 12, больше, можно обнаружить более тонкий мат R. Величина выступа задается надлежащим образом в соответствии с толщиной мата R, который нужно обнаружить.
Микропереключатель 38, например, является нормально открытым или нормально закрытым переключателем, имеющим переключающую деталь 38а в форме кнопки, выступающей вперед в сторону поворотного элемента 37, и имеет возможность включаться/выключаться (замыкаться/размыкаться) только, когда переключающая деталь 38а нажата выступающей частью 37а, которая прижимается относительно назад и поворачивается при контакте поворотного элемента 37 с матом R.
Поворотный элемент 37 поворачивается назад при контакте с матом R, входящим в пространство между нижней поверхностью 12а основного корпуса 12 и поверхностью F пола; микропереключатель 38 включается/выключается и, таким образом, узел 21 обнаружения препятствий определяет, находится ли препятствие, например ковер или циновка, препятствующее автономному движению, под основным корпусом 12.
Управляющее устройство 22 содержит, например, запоминающее устройство и управляющую часть, например микрокомпьютер. Как показано на фиг.4, управляющее устройство 22 электрически соединено с электрическим вентилятором 13, с электродвигателем 26, с каждым электродвигателем 16, с каждым электродвигателем 19, с датчиками 20, с узлом 21 обнаружения препятствий (с микропереключателем 38), и с приводом 35 и пр. и выполнено с возможностью управлять приведением в действие электрического вентилятора 13, электродвигателя 26, каждого электродвигателя 16, каждого электродвигателя 19 и пр. на основе результатов обнаружения датчика 20 и узла 21 обнаружения препятствий (микропереключателя 38).
Вторичный аккумулятор 23, показанный на фиг.2 и 3, подает питание к каждой части, показанной на фиг.4: управляющему устройству 22, электрическому вентилятору 13, электродвигателю 26, каждому электродвигателю 19, датчику 20 и пр. Вторичный аккумулятор 23 расположен, например, за поворотным колесом 17. Вторичный аккумулятор 23 электрически соединен с зарядными клеммами 45 и 45, расположенными на обеих сторонах поворотного колеса 17 на нижней поверхности 12а основного корпуса 12, и может заряжаться, когда клеммы 45 и 45 соединены, например, с заранее определенным зарядным столом (не показан), установленным в заранее определенном положении в комнате.
Далее следует описание работы варианта настоящего изобретения.
Электрический пылесос 11 приводит в действие электрический вентилятор 13, например, в заранее определенный момент времени, заданный управляющим устройством 22, и начинает чистку, например, лот зарядного стола. Кроме того, стартовую позицию для чистки можно задавать произвольно, например, на входе в комнату для начала движения электрического пылесоса 11.
Электрический пылесос 11 автономно перемещается по поверхности F пола, при этом управляющее устройство 22 приводит во вращение электродвигатели 16 и 16 для вращения ведущих колес 15 и 15. Управляющее устройство 22 отслеживает положение и состояние движения электрического пылесоса 11, измеряя расстояние между пылесосом и периферийным препятствием с помощью датчиков 20. Электрический пылесос 11 перемещается по поверхности F пола, избегая препятствий в соответствии с показаниями датчика 20, и засасывает пыль с поверхности F пола и воздух во всасывающий порт 24, на который подается отрицательное давление, генерируемое электрическим вентилятором 13.
Одновременно управляющее устройство 22 приводит в действие электродвигатель 26 и электродвигатели 19 и 19, тем самым приводя во вращение щетку 25, подметающую поверхность F пола, и приводит во вращение боковые щетки 18 и 18 по поверхности пола. Таким образом, пыль, имеющаяся на поверхности F пола, соскабливается чистящими частями вращающейся щетки 25, щетинками 32b каждой боковой щетки 18 и т.п., и сметается к центральной части основного корпуса 12 в направлении ширины, к всасывающему порту 24 и всасывается через всасывающий порт 24.
Пыль, засосанная через всасывающий порт 24 вместе с воздухом, сепарируется и захватывается в пылесборнике 14. Оставшийся после сепарирования пыли воздух подается на электрический вентилятор 13, охлаждает его и, затем, выпускается наружу из основного корпуса 12.
Когда, как показано на фиг.1(а), мат R попадает под основной корпус 12 при автономном перемещении электрического пылесоса 11, мат R контактирует с передней частью поворотного элемента 37 узла 21 обнаружения препятствий. Когда электрический пылесос 11 перемещается дальше, как показано на фиг.1(b), поворотный элемент 37 поворачивается назад, выступающая часть 37а поворотного элемента 37 прижимается к переключающей детали 38а микропереключателя 38, и микропереключатель 38 включается/выключается. Другими словами, мат R обнаруживается узлом 21 обнаружения препятствий. Управляющее устройство 22 по включению/выключению микропереключателя 38 определяет, что мат R находится перед основным корпусом 12 (электрического пылесоса 11) и под ним, и приводит в действие и вытягивает привода 35. При вытягивании приводов 35 нижний конец каждого электродвигателя 19 постепенно поворачивается вперед интегрально с каждой боковой щеткой 18, расстояние между каждым электродвигателем 19 и базовым концом каждого привода 35 при таком повороте постепенно изменяется и, поэтому, рабочий конец каждого привода 35, соединенный с каждым электродвигателем 19, поворачивается вверх. Таким образом, передняя часть каждой боковой щетки поворачивается вверх интегрально с каждым электродвигателем 19 и отводится вверх относительно мата R, тем самым предотвращается цепляние каждой боковой щетки 18 за мат R. В этом случае каждый электродвигатель 19 и каждая боковая щетка 18 поворачиваются так, что рабочие концы щетинок 32b щетки находятся спереди и выше, чем нижняя поверхность 12а основного корпуса 12. Когда электрический пылесос 11 перемещается дальше и каждое ведущее колесо 15 въедет на мат R, поворотный элемент 37, отогнутый назад матом R, вновь поворачивается вперед, выступающая часть 37а поворотного элемента 37 отходит от переключающей детали 38а микропереключателя 38, и, таким образом, микропереключатель 38 вновь включается/выключается. Соответственно, поскольку узел 21 обнаружения препятствий не определяет, что мат R расположен под основным корпусом 12, как показано на фиг.1(с), управляющее устройство 22 для продолжения чистки втягивает каждый привод 35 и вновь поворачивает переднюю часть каждой боковой щетки 18 вниз интегрально с каждым электродвигателем 19.
Когда будет определено, что чистка всей поверхности F пола, подлежащая очистке, закончена, управляющее устройство 22 заставляет электрический пылесос 11 автономно переместиться в положение, в котором находится зарядный стол, останавливает электрический вентилятор 13, электродвигатели 19 и 26 и пр., соединяет зарядные клеммы 45 и 45 (физически и электрически) с зарядным столом, останавливает электродвигатели 16 и 16, останавливает движение пылесоса и начинает зарядку аккумулятора.
В описанном выше варианте, поскольку каждая боковая щетка 18 отводится вверх, когда узел 21 обнаружения препятствий, расположенный перед всасывающим портом 24, обнаружит, что мат R, препятствующий автономному движению, расположен под основным корпусом 12, возникает возможность предотвратить цепляние (щетинок 32b) боковых щеток 18, расположенных внизу, за мат R при дальнейшем движении электрического пылесоса 11 вперед и не допустить состояние, в котором электрический пылесос не может продолжать движение (застревает) и чистка с автономным перемещение может продолжаться.
Более конкретно, когда узел 21 обнаружения препятствий обнаруживает, что мат R, препятствующий автономному перемещению, расположен под основным корпусом 12, управляющее устройство 22 поворачивает и отводит переднюю часть каждой боковой щетки вверх, вытягивая каждый привод 35, поднимая его и надежно заставляет подняться переднюю часть каждой боковой щетки 18, которая особенно легко цепляется за мат R, когда электрический пылесос 11 движется вперед, что предотвращает такое цепляние.
Когда узел 21 обнаружения препятствий определяет, что мат R, препятствующий автономному движению, расположен под основным корпусом 12, управляющее устройство 22 поворачивает переднюю сторону каждой боковой щетки 18 так, что концы щетинок 32b щетки, расположенных спереди, поднимаются выше нижней поверхности 12а основного корпуса 12. Поэтому можно надежно предотвратить цепляние боковых щеток 18, например, за толстый мат R и надежно избежать ситуации, в которой электрический пылесос 11 не может продолжать движение (застревает).
Поскольку узел 21 обнаружения препятствий содержит поворотный элемент 37, который выступает из нижней поверхности основного корпуса 12 перед всасывающим портом 24 и может поворачиваться в продольном направлении, и микропереключатель 38, который расположен за поворотным элементом 37 и включается/выключается повернутым назад поворотным элементом 37, управляющее устройство 22 по включению/выключению микропереключателя 38 обнаруживает мат R, расположенный под основным корпусом 12, можно легко создать механический узел 21 обнаружения препятствий, способный обнаруживать мат R и осуществлять подъем над матом. Соответственно, дорогой датчик и т.п. не требуется, и себестоимость можно снизить.
Кроме того, в этом варианте препятствие, которое должно обнаруживаться узлом 21, не ограничивается матом R.
Узел 21 обнаружения препятствий может быть расположен, например, перед каждой боковой щеткой 18, и изобретение не ограничивается конструкцией, в которой узел 21 обнаружения препятствий расположен в нижней части основного корпуса 12. Например, узел 21 обнаружения препятствий может быть расположен сбоку от основного корпуса 12.
Хотя управляющее устройство 22 имеет следующие интегрированные функции: функцию управления вращением ведущих колес 15 и 15 через электродвигатели 16 и 16 и отвода боковых щеток 18 и 18 вверх через электродвигатели 19 и 19 с помощью телескопических приводов 35 и 35; функцию управления вращением боковых щеток 18 и 18 через электродвигатели 19 и 19; функцию управления работой электрического вентилятора 13; и функцию управления вращением вращающейся щетки 25 через электродвигатель 26, все эти функции могут быть реализованы раздельно.
Управляющее устройство 22 при условии, что оно выполнено с возможностью отводить вверх каждую боковую щетку 18, может не только поворачивать каждую боковую щетку 18, но и, например, непосредственно перемещать щетку в вертикальное положение.
Для каждой боковой щетки 18 можно использовать любой чистящий элемент. Вместо щетинок 32b щетки можно использовать скребок, отходящий в форме полосы, или в качестве чистящего элемента можно использовать комбинацию щетинок и скребка.
Если на одной боковой стороне перед всасывающим портом 24 на основном корпусе 12 расположена одна боковая щетка 18, достигается тот же эффект, что и в вышеописанном варианте.
Вместо электрического вентилятора 13 можно использовать конструкцию, которая сметает пыль с поверхности F пола вращающейся щеткой 25 и собирает ее в пылесборник 14.
Хотя выше были описаны некоторые конкретные варианты, эти варианты являются только иллюстрациями и не ограничивают объем настоящего изобретения. Новые способы и системы, описанные выше, могут быть реализованы в различных других формах. Кроме того, в форму способов и систем, описанных выше, могут быть внесены различные исключения, замены и изменения, не выходящие за пределы объема настоящего изобретения. Такие формы или модификации, входящие в изобретательскую идею и объем изобретения, включены в приложенную формулу изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2012 |
|
RU2562043C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2433779C1 |
| ЭЛЕКТРОПЫЛЕСОС | 2012 |
|
RU2552763C2 |
| ПЫЛЕСОС | 2010 |
|
RU2500331C2 |
| ПЫЛЕСБОРНИК И ПЫЛЕСОС | 2011 |
|
RU2484756C2 |
| МОТОР-ВЕНТИЛЯТОР И ИСПОЛЬЗУЮЩИЙ ЕГО ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2388400C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2454917C1 |
| ПЫЛЕСОС И ЕГО УЗЕЛ ШЛАНГА | 2011 |
|
RU2483666C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2011 |
|
RU2486858C1 |
| ПЫЛЕСОС (ВАРИАНТЫ) | 2007 |
|
RU2396066C2 |

Изобретение относится к электрическому пылесосу, который автономно перемещается и чистит поверхность, подлежащую очистке. Технический результат заключается в возможности беспрепятственного перемещения электрического пылесоса по очищаемой поверхности. Согласно одному варианту электрический пылесос 11 содержит: поворотные боковые щетки 18, каждая из которых имеет щетинки 32b, взаимодействующие с поверхностью F пола и расположенные перед всасывающим портом на нижней части основного корпуса 12; узел 21 обнаружения препятствий для обнаружения, находится ли мат R, мешающий автономному перемещению, под основным корпусом 12; и управляющее устройство, поднимающее вверх боковые щетки 18, когда узел 21 обнаружения препятствий обнаружит, что мат R, мешающий автономному движению, находится под основным корпусом 12. 2 з.п. ф-лы, 4 ил.
1. Электрический пылесос, автономно перемещающийся по очищаемой поверхности и чистящий ее, содержащий: основной корпус, порт для сбора пыли, расположенный в нижней части основного корпуса, вращающуюся чистящую деталь, содержащую чистящий элемент, опирающийся на очищаемую поверхность, и расположенную перед портом для сбора пыли в нижней части основного корпуса так, чтобы иметь возможность вращения на очищаемой поверхности, узел обнаружения препятствий для определения, находится ли препятствие, мешающее автономному перемещению, под основным корпусом, и управляющее устройство, выполненное с возможностью поворота и отвода наверх передней стороны вращающейся чистящей детали, когда узел обнаружения препятствий определяет наличие препятствия, мешающего автономному перемещению, под основным корпусом.
2. Пылесос по п. 1, в котором по меньшей мере часть узла обнаружения препятствий выступает вниз относительно основного корпуса, и управляющее устройство поворачивает переднюю сторону вращающейся чистящей детали в положение, расположенное выше, чем нижняя поверхность основного корпуса, когда узел обнаружения препятствий определяет наличие препятствия, мешающего автономному перемещению, под основным корпусом.
3. Пылесос по п.1 или 2, в котором узел обнаружения препятствий содержит поворотный элемент, выступающий от нижней части основного корпуса перед портом для сбора пыли и выполненный с возможностью поворота в продольном направлении, и переключатель, расположенный за поворотным элементом и включающийся/выключающийся, когда поворотный элемент повернут назад, и управляющее устройство посредством включения/выключения переключателя обнаруживает препятствие, расположенное под основным корпусом.

