Настоящее изобретение относится к системе для мониторинга группировки спутников.
В частности, оно относится к проверке сигналов позиционирования, поступающих от спутников (позиционирования) обычной спутниковой системы позиционирования, например, типа GALILEO, GPS или ГЛОНАСС.
Как известно, спутниковые системы позиционирования содержат группировку спутников, расположенных на орбитах средней высоты (порядка 25000 км) вокруг Земли. Такие спутники и их орбиты обычно называются в данной области техники «СОО спутники» и «СОО орбиты», соответственно (для «Средней Околоземной Орбиты»). СОО спутники равномерно распределены в нескольких плоскостях орбит, так что в любой точке Земли пользователь может видеть несколько спутников, то есть быть непосредственно соединенным с ними (по меньшей мере с тремя, но если пользователь хочет знать свою угловую высоту, то с четырьмя) и вывести из этого свои земные координаты. Каждый из СОО спутников содержит высокостабильные и точные атомные часы, а также электронное оборудование, отправляющее пользователям сигналы позиционирования, содержащие скорректированное время (приведенное к общей привязке) и эфемериды спутника. По таким сигналам позиционирования, принятым от нескольких СОО спутников, пользователь определяет свое расстояние до различных видимых спутников, и, следовательно, выводит из них свою позицию в земных координатах. Настоящее изобретение направлено на проверку целостности таких сигналов позиционирования.
Известно, что в обычных решениях используют специализированные наземные станции. Такие стационарные станции постоянно сравнивают информацию, принятую от спутников (посредством сигналов позиционирования), с их точно известной эффективной позицией, чтобы по возможности обнаруживать ошибку неточного согласования в принятых сигналах. Возможные локальные отклонения передаются в один или более центров управления, обрабатывающих информацию и идентифицирующих спутник(и), передающие ошибочные сигналы позиционирования. Такая информация о качестве из принятых сигналов позиционирования передается в дальнейшем пользователям, так что они игнорируют ошибочные сигналы в своих вычислениях позиционирования.
Причины ошибок в принимаемых сигналах позиционирования могут быть разделены на две большие категории:
- общие ошибки, обусловленные спутниками. Такие ошибки, главным образом, обусловлены дрейфом бортовых часов, задающих привязку по времени, дрейфом параметров орбиты спутников, или аномалиями обработки на борту спутников; и
- локальные ошибки, обусловленные распространением сигналов через атмосферу и/или явлением локального многолучевого распространения. Такие ошибки меняются со временем, одновременно затрагивая только ограниченное количество пользователей, и, так как они зависят от естественных физических явлений, оператор, который не имеет средств для их корректировки, не несет за них непосредственной ответственности.
Так как все спутниковые системы позиционирования используют измерение разности времен поступления для сигналов позиционирования, излучаемых спутниками, для вычисления позиции на земле, и так как обе вышеупомянутые категории ошибок обладают идентичным эффектом, а именно ошибкой отсчета времени сигналов, принятых пользователем, то легко перепутать локальную ошибку распространения с ошибкой отсчета времени сигнала, посланного спутниками. Для того, чтобы различить и подавить такую неоднозначность, специализированные центры обработки собирают информацию, поступающую от множества станций на земле, и, посредством в основном статистических вычислений, отделяют общую часть ошибки от локальной части ошибки. Фактически, только общую часть ошибки, то есть ту, которая поступает от одного или более спутников, следует передавать всем пользователям. Такая сложная обработка занимает много времени, так как она подразумевает ожидание достаточного количества информации, чтобы однозначно отличить часть, являющуюся локальной для одной или более станций (например, влияние ионосферы или геометрия группировки, приводящая к многолучевому распространению) от части, являющейся общей для всех станций и причина которой, таким образом, может быть расположена только на борту одного или более спутников.
Пока положительная идентификация ошибочного(ошибочных) спутника(ов) не завершена, все пользователи будут совершать ошибки в своих вычислениях позиционирования, с потенциально серьезными последствиями, в частности, для мобильных устройств. Легко понять, что уменьшение времени идентификации ошибочных (спутниковых) сигналов позиционирования является приоритетной задачей для любого оператора такой системы позиционирования в целях обеспечения качества своей системы для пользователей.
Настоящее изобретение направлено на решение вышеупомянутых недостатков. Оно относится к системе мониторинга, предназначенной для мониторинга сигналов позиционирования, излучаемых группировкой спутников, принадлежащих системе позиционирования, например типа GPS, GALILEO или ГЛОНАСС, и позволяющей устранить вышеуказанные недостатки.
С этой целью, в соответствии с настоящим изобретением, упомянутая система мониторинга отличается тем, что она содержит:
- по меньшей мере один спутник мониторинга, позиционированный на орбите с высотой более низкой, чем высота орбиты спутников упомянутой группировки спутников, так, чтобы принимать сигналы позиционирования, излучаемые такими спутниками в направлении Земли, и содержащий следующие бортовые средства:
- по меньшей мере один приемник, способный напрямую принимать сигналы позиционирования, излучаемые спутниками упомянутой группировки спутников;
- по меньшей мере один блок обработки, сформированный таким образом, чтобы проверять целостность упомянутых принятых сигналов позиционирования, используя информацию позиционирования, являющуюся независимой от этих сигналов позиционирования, и чтобы определять случаи, в которых спутник(и) излучают ошибочные сигналы позиционирования; и
- по меньшей мере один излучатель, способный излучать в направлении Земли данные о целостности, указывающие, в случае наличия, спутник(и) упомянутой группировки спутников с ошибочными сигналами позиционирования;
- по меньшей мере один центр управления, расположенный на Земле, для управления упомянутым спутником мониторинга, определяющий его орбиту, и содержащий средство, способное принимать данные о целостности, излучаемые таким спутником мониторинга; и
- по меньшей мере один центр распространения сообщений о целостности, расположенный на Земле, и содержащий:
- средство для приема данных о целостности от спутника мониторинга, передаваемых упомянутым центром управления;
- средство для определения из таких данных о целостности сообщений о целостности, относящихся к спутникам упомянутой группировки спутников системы позиционирования; и
- средство для излучения таких сообщений о целостности пользователям.
Таким образом, благодаря этому изобретению, вместо использования стационарных станций, установленных на земле, для мониторинга группировки спутников системы позиционирования, система мониторинга использует по меньшей мере один спутник мониторинга, расположенный на более низкой высоте, чем высота спутников упомянутой группировки спутников, таким образом, чтобы иметь возможность принимать сигналы позиционирования, излучаемые последними (и предназначенные пользователям системы позиционирования), но размещенный на такой орбите, чтобы предотвратить локальные ошибки, возникающие, как описано выше, вследствие, в частности, явления локального многолучевого распространения, или вследствие задержек распространения.
Следовательно, получена чрезвычайно надежная система мониторинга, позволяющая, в частности, автономно и быстро обнаруживать, при этом без неоднозначности, ошибочные сигналы позиционирования, излучаемые одним или более спутниками подвергаемой мониторингу системы позиционирования, использующая с этой целью информацию позиционирования, являющуюся независимой от упомянутых сигналов позиционирования.
В предпочтительном варианте осуществления, упомянутая система мониторинга содержит множество спутников мониторинга, таких как упомянутые здесь выше, размещенных на более низких орбитах, чем спутники группировки, и реализующие вышеупомянутые функции.
Предпочтительно, каждый спутник мониторинга дополнительно содержит бортовое вспомогательное средство, позволяющее определять (с помощью информации, принимаемой от упомянутого центра управления) первую позицию в пространстве упомянутого спутника мониторинга, без использования упомянутых сигналов позиционирования, излучаемых спутниками группировки спутников, и упомянутый блок обработки содержит:
- первое средство для вычисления по меньшей мере одной второй позиции, с помощью упомянутых сигналов позиционирования, принимаемых от спутников группировки спутников;
- второе средство для сравнения между собой упомянутых первой и второй позиций; и
- третье средство для формирования вывода на основании этого, в случае наличия, о существовании ошибочных сигналов позиционирования.
Более того, в предпочтительном варианте осуществления:
- упомянутое первое средство формируется таким образом, чтобы вычислять множество вторых позиций, каждая из упомянутых вторых позиций вычисляется с использованием сигналов позиционирования, принимаемых от подгруппы спутников упомянутой группировки спутников, каждая упомянутая подгруппа содержит одинаковое предварительно определенное первое количество спутников (например, четыре спутника), и любые две подгруппы в любой момент имеют в общем не более второго предварительно определенного количества спутников (например, два спутника);
- упомянутое второе средство формируется таким образом, чтобы сравнивать каждую из этих вторых позиций с упомянутой первой позицией; и
- упомянутое третье средство формируется таким образом, чтобы определять спутник(и), сигналы позиционирования которого(которых) являются ошибочными, с помощью результатов сравнения, реализованного упомянутым вторым средством, и состав упомянутых подгрупп.
Более того, каждый спутник мониторинга дополнительно содержит одну приемную антенну, связанную с упомянутым приемником, позиционированную таким образом, чтобы избежать многолучевого распространения, и окруженную одним электромагнитным защитным экраном для удаления нежелательных режимов распространения (посредством отражения или дифракции сигналов позиционирования на структуре упомянутых спутников мониторинга), позволяющим удалить наиболее частые явления, способные нарушить прием сигналов антенной.
В предпочтительном варианте осуществления, упомянутый(е) спутник(и) мониторинга размещен(ы) на орбитах:
- имеющих высоты большие, чем высота плотных слоев ионосферы, что позволяет избежать возникновения ионосферных задержек в результате прохождения сигналов позиционирования через плотные слои ионосферы; и/или
- плоскости которых отличаются от плоскостей орбит упомянутых спутников группировки спутников, чтобы максимизировать точность обнаружения ошибок.
Более того, в предпочтительном варианте осуществления, упомянутые центры управления и распространения расположены в одном месте и принадлежат единому центру администрирования.
Дополнительно, предпочтительно, упомянутый центр управления дополнительно содержит:
- средство для удаленного управления каждым их упомянутых спутников мониторинга; и
- средство для вычисления параметров орбит упомянутого(упомянутых) спутника(спутников) для мониторинга и обновления блоков обработки на борту такого(таких) спутника(спутников) мониторинга.
Более того, предпочтительно, упомянутый центр распространения дополнительно содержит средство кодирования для кодирования сообщений о целостности перед их отправкой, чтобы ограничить использование такой информации определенным кругом пользователей (например, имеющими подписанный договор), которым предоставлено соответствующее средство декодирования.
Фигуры приложенных чертежей лучше объяснят, как это изобретение может быть реализовано. На этих фигурах одинаковые условные обозначения относятся к одинаковым компонентам.
На Фиг. 1 схематично проиллюстрирована архитектура системы мониторинга в соответствии с этим изобретением.
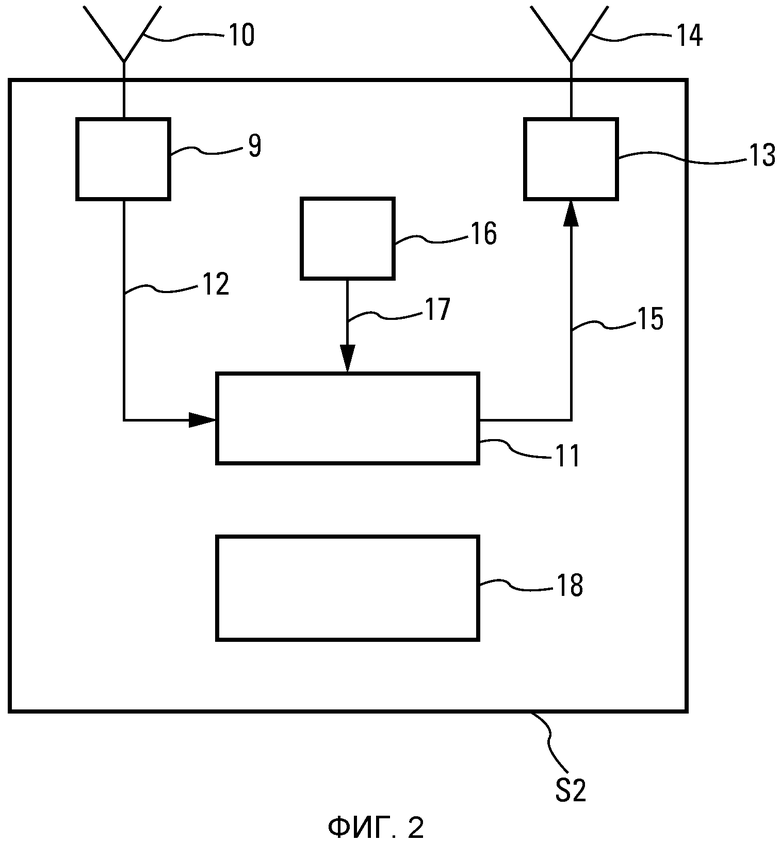
На Фиг. 2 схематично показаны основные средства, расположенные на борту спутника мониторинга, принадлежащегося системе мониторинга в соответствии с этим изобретением.
На Фиг. 3 представлена блок-схема блока обработки для спутника мониторинга в соответствии с этим изобретением.
На Фиг. 4 и 5 схематично показаны основные средства, соответственно, центра управления и центра распространения.
Система 1 мониторинга в соответствии с этим изобретением, и показанная в соответствии со схематической архитектурой на Фиг. 1, предназначена для мониторинга обычной спутниковой системы позиционирования, например типа GALILEO, GPS, ГЛОНАСС, а также улучшающих спутников, таких как EGNOSS.
На Фиг. 1 просто представлена группировка 2 спутников такой системы позиционирования. Такая группировка 2 спутников содержит множество спутников S1, размещенных на орбите вокруг Земли T, на орбите O1, имеющей, как правило, среднюю высоту (порядка 20000-25000 км).
Система 1 мониторинга в соответствии с этим изобретением, в частности, направлена на мониторинг сигналов позиционирования, излучаемых спутниками S1 такой группировки 2 спутников системы позиционирования. Как правило, известно, что такие сигналы позиционирования используются пользователями системы позиционирования, чтобы определять более точно их позицию, и, по желанию, их скорость.
В соответствии с изобретением, упомянутая система 1 мониторинга содержит для этой цели:
- по меньшей мере один, но предпочтительно множество спутников S2 мониторинга. Такие спутники S2 мониторинга расположены на орбите вокруг земли T, на орбите O2, высота которой, например, находится в диапазоне от 2000 до 3000 метров, является более низкой, чем высота (порядка 20000-25000 метров) орбиты спутников S1 упомянутой группировки 2 спутников, с тем, чтобы принимать, как показано стрелками E, сигналы позиционирования, излучаемые большим количеством спутников S1 на Землю T;
- по меньшей мере один центр 3 управления, расположенный на Земле T, управляющий упомянутыми спутниками S2 мониторинга, и содержащий средство 4, способное принимать данные о целостности, излучаемые такими спутниками S2 мониторинга. Линии L1 передачи данных между центром 3 управления и спутниками S2 мониторинга являются линиями связями обычного типа, основанными на электромагнитных волнах; и
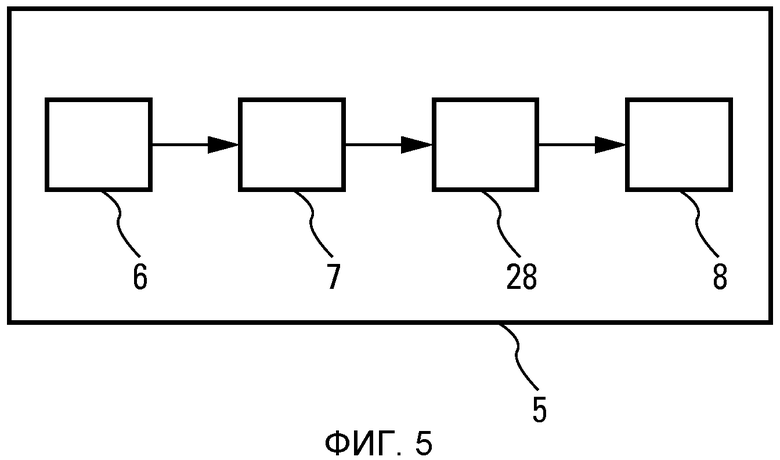
- по меньшей мере один центр 5 распространения сообщений о целостности, расположенный на Земле T, и содержащий, как показано на Фиг. 5:
- средство 6 для приема данных о целостности, излучаемых упомянутыми спутниками S2 мониторинга, и передаваемых упомянутым центром 3 управления;
- средство 7 для определения из таких данных о целостности сообщений о целостности, относящихся к спутникам S1 упомянутой группировки 2 спутников системы позиционирования. Такие сообщения о целостности четко идентифицируют, в случае наличия, спутник(и) S2, излучающие ошибочные сигналы позиционирования; и
- средство 8 для излучения таких сообщений о целостности пользователям.
Пользователи системы позиционирования могут потом игнорировать сигналы позиционирования, принятые от спутников S1, идентифицированных в сообщениях о целостности, и использовать только целостные сигналы спутников S1.
Кроме того, в соответствии с изобретением, каждый из спутников S2 мониторинга системы 1 содержит по меньшей мере следующие бортовые средства, как показано на Фиг. 2:
- по меньшей мере один приемник 9, способный принимать, посредством связанной антенны 10, сигналы позиционирования, излучаемые спутниками S1 упомянутой группировки 2 спутников;
- по меньшей мере один блок 11 обработки, формируемый таким образом, чтобы проверять целостность упомянутых сигналов позиционирования, принимаемых посредством линии 12 связи, с использованием информации позиционирования (будет описано ниже), являющейся независимой от таких сигналов позиционирования. Дополнительно, такой блок 11 обработки формируется так, чтобы определять, в случае наличия, спутник(и) S1, излучающие ошибочные сигналы позиционирования; и
- по меньшей мере один излучатель 13, способный излучать к Земле T, как показано линией L1 связи, при помощи связанной антенны 14, данные о целостности, принятые (по линии 15 связи) от блока 11 обработки, и указывающих, в случае наличия, спутник(и) S1 упомянутой группировки 2 спутников, сигналы позиционирования которого(которых) являются ошибочными.
Система 1 мониторинга, таким образом, способна независимо проверять целостность подвергаемой мониторингу системы позиционирования, и имеет возможность вещания информации, относящейся к качеству сигналов позиционирования, излучаемых спутниками S1, в частности, пользователям упомянутой системы позиционирования.
Польза от использования спутников S2 мониторинга вместо стационарных земных станций, заключается, в частности, в том, что сигналы позиционирования, принятые от таких спутников S2 мониторинга, лишены любых локальных ошибок, таких, как, например, многолучевое распространение. Через спутники S2 мониторинга такого типа, система 1 мониторинга, таким образом, может выполнять без неоднозначности быстрое автономное обнаружение ошибочных сигналов позиционирования, излучаемых одним или более спутниками S1 группировки 2 спутников системы позиционирования.
В частном варианте осуществления, упомянутые спутники S2 мониторинга размещены на орбитах O2:
- имеющих высоты большие, чем высота плотных слоев ионосферы, что позволяет избежать возникновения ионосферных задержек в результате прохождения сигналов позиционирования через плотные слои ионосферы; и/или
- плоскости которых отличаются от плоскостей орбит O2 упомянутых спутников S1, с тем, чтобы максимизировать точность обнаружения ошибок.
Дополнительно, в предпочтительном варианте осуществления, каждый спутник S2 мониторинга имеет следующее бортовое оборудование, показанное на Фиг. 2, некоторое из которого ранее упоминалось:
- принимающая антенна 10 для сигналов позиционирования. Такая антенна 10 позиционирована таким образом, чтобы не было возможности многолучевого распространения через отражение или дифракцию сигналов позиционирования на структуре спутника мониторинга S2. С этой целью, такая антенна 10 может также обеспечиваться, если есть необходимость, обычным электромагнитным защитным экраном (не показан), предназначенным для удаления нежелательных режимов распространения, и окружающим такую антенну 10;
- один или более приемников 9, задающих позицию антенны 10 спутника S2 мониторинга по отношению к группировке 2 спутников системы позиционирования, а также информацию о времени;
- высокостабильные часы 16, обеспечивающие привязку по времени, независимую от группировки 2 спутников;
- один или более блоков 11 обработки для обработки информации, передаваемой через бортовые приемники 9 и часы 16 (по линиям 12 и 17 связи) и формируемые так, чтобы обнаруживать, отправляет ли один или более спутников S1 позиционирования ошибочные сигналы позиционирования, как описано ниже;
- излучатель 13 и его антенна 14, работающие на частотах, отличных от частот сигналов позиционирования, и передающие результаты обработки, реализованной блоком (блоками) 11 обработки; и
- набор 18 обычных элементов и функциональных возможностей любого спутника, предназначенных, в частности, для:
- управления высотой и корректировки орбиты O2 спутника S2 мониторинга;
- подачи необходимой электрической энергии;
и
- обеспечения приемлемого теплового режима для бортового оборудования.
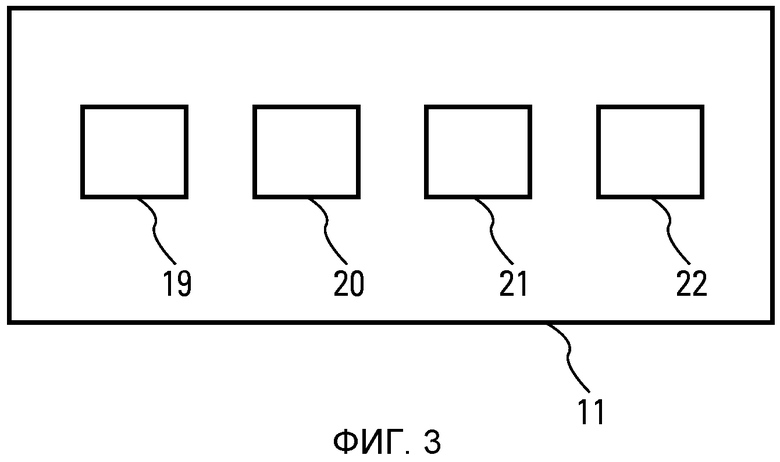
В рамках объема настоящего изобретения, бортовой блок (бортовые блоки) 11 обработки спутников S2 мониторинга осуществляют операции по администрированию для спутников S2, а также операции, характерные для миссии мониторинга. В частности, для выполнения последних операций, бортовой блок 11 обработки содержит следующие средства, показанные на Фиг. 3:
- средство 19 для вычисления трехмерной позиции и скорости подвергаемого мониторингу спутника S1 из сигналов позиционирования, принимаемых от группировки 2 спутников. Такие сигналы используются в равномерно распределенных подгруппах. Каждая подгруппа содержит заданное количество спутников, например, 4 спутника, не более чем заданное количество которых (например, два) являются общими для двух подгрупп;
- средство 20 для администрирования распространением параметров орбиты спутника и бортового времени. Такие параметры изначально загружаются из центра 3 управления;
- средство 21 для генерирования данных о целостности, идентифицирующих, в случае наличия, спутник(и) S1, сигналы позиционирования которого(которых) являются ошибочными. Такие данные о целостности должны передаваться в центр 3 управления и пользователям системы позиционирования; и
- средство 22 для мониторинга рабочего состояния спутника S2 мониторинга и, в частности, согласованности между вычисленной трехмерной позицией и позицией, распространяемой на борту, чтобы иметь возможность обнаружить аномалию бортовой полезной нагрузки.
Для этой цели может быть использовано характерное свойство спутника S2 мониторинга, заключающееся в том, что не может существовать несколько истинных трехмерных позиций для одного спутника S2, так как последний содержит единственную принимающую антенну 10. Такое условие удовлетворяется с еще большей точностью, так как центр тяжести спутника S2 мониторинга расположен близко к позиции принимающей антенны 10, такое условие удовлетворяется для небольшого спутника, размер которого, как правило, меньше одного метра, и угловая высота которого, как известно, находится в пределах нескольких градусов. В случае, когда спутник S2 имеет большее расстояние между его центром тяжести и его принимающей антенной 10, средство 22 может содержать вычислительное средство для выполнения корректировки как функции высоты спутника S2, с целью поддержать соответствие между вычисленной позицией центра тяжести, находящегося на орбите O2, и позицией принимающей антенны 10, обеспечивающей вычисленную трехмерную позицию.
Кроме того, в соответствии с изобретением, упомянутое средство 19 сравнивает вычисленные 3D позиции для каждой подгруппы, с независимой позицией, оцениваемой из параметров орбиты спутника S2 мониторинга, принятых от упомянутого центра 3 управления так, чтобы определить есть ли отклонение (превышающее предварительно определенное значение). В случае отсутствия существенного отклонения, блок 11 обработки приходит к следующему заключению:
- с одной стороны, независимая позиция, вычисленная с использованием параметров орбиты, корректна; и
- с другой стороны, все сигналы позиционирования, излучаемые спутниками рассматриваемой подгруппы являются надежными, так как в таком случае статистически невозможно наличие двух компенсирующих ошибок.
И наоборот, если обнаружено существенное отклонение, упомянутым средством 19 осуществляются регрессивные вычисления для определения того, какой(какие) из спутников S1 передает(передают) ошибочные сигналы. Принципом вычислений является тот факт, что если одна из подгрупп показывает существенное отклонение по отношению к вычисленной независимой позиции, то такая подгруппа содержит по меньшей мере один спутник S1 с ошибочными сигналами позиционирования. Таким образом, осуществляя серию замен спутников S1 такой подгруппы спутниками другой подгруппы, упомянутое средство 19 способно оперативно изолировать спутник(и) S1, являющиеся источником обнаруженной (обнаруженных) ошибки (ошибок).
В упрощенном (не показано) варианте осуществления, центр 3 управления и центр 5 распространения расположены в одном местоположении на Земле T и принадлежат единому центру администрирования.
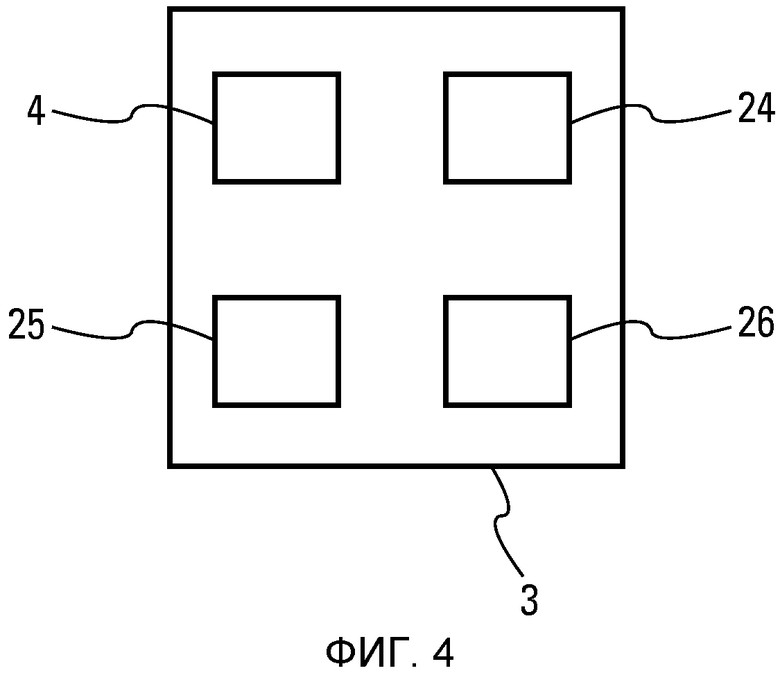
Упомянутый центр 3 управления, в частности, содержит, как показано на Фиг. 4:
- упомянутое средство 4 для приема данных о целостности, излучаемых спутниками S2 мониторинга;
- средство 24 для удаленного управления упомянутыми спутниками S2 мониторинга посредством связи S1;
- средство 25 для вычисления параметров орбит упомянутых спутников S2 мониторинга и для обновления блоков 11 обработки на борту таких спутников S2 мониторинга; и
- средство 26 для излучения данных о целостности к центру 5 распространения, что проиллюстрировано посредством линии L2 связи на Фиг. 1.
Упомянутый центр 5 распространения также содержит, в дополнение к вышеупомянутым средствам 6, 7 и 8, средство 28 кодирования для кодирования сообщений о целостности (генерируемых средством 7) перед их отправкой (через средство 8) пользователям, так что только авторизованные или заплатившие взнос пользователи могут декодировать информацию о целостности. Распространение ключей расшифровки может осуществляться посредством обычных защищенных средств. Отправка информации о целостности (пользователям) может происходить следующими образами:
- через Интернет; или
- через радиоэлектрические волны; или
- через существующее средство или специальное средство (радио или телевидение, спутники связи, EGNOSS и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| СПОСОБ И СИСТЕМА СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2383898C2 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА СПУТНИКА ДЛЯ УСТАНОВЛЕНИЯ СВЯЗИ | 1994 |
|
RU2117393C1 |
| СПОСОБ ПОСТРОЕНИЯ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ МЕЖДУ АБОНЕНТАМИ | 1996 |
|
RU2107990C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ КОММУНИКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2302695C2 |
| Глобальная система спутниковой связи и передачи данных с космическими аппаратами на низкой круговой орбите | 2014 |
|
RU2614049C2 |
Изобретение относится к области радиотехники, а именно к системам для мониторинга, и может быть использована для мониторинга группировки спутников системы позиционирования. Технический результат заключается в обеспечении пользователей информацией, относящейся к качеству сигналов позиционирования, с использованием проверки целостности подвергаемой мониторингу системы позиционирования, без локальных ошибок сигналов позиционирования от станций мониторинга, таких как, например, многолучевое распространение. Для этого система (1) мониторинга содержит по меньшей мере один спутник (S2) мониторинга, размещенный на орбите (O2) на меньшей высоте, чем спутники (S1) группировки (2) спутников, так, чтобы иметь возможность принимать сигналы позиционирования, излучаемые в направлении Земли (Т) упомянутыми спутниками (S1), и содержит блок (11) обработки, предназначенный для проверки целостности упомянутых принятых сигналов позиционирования, с использованием информации о позиции, которая для этого отделена от упомянутых сигналов. 9 з.п. ф-лы, 5 ил.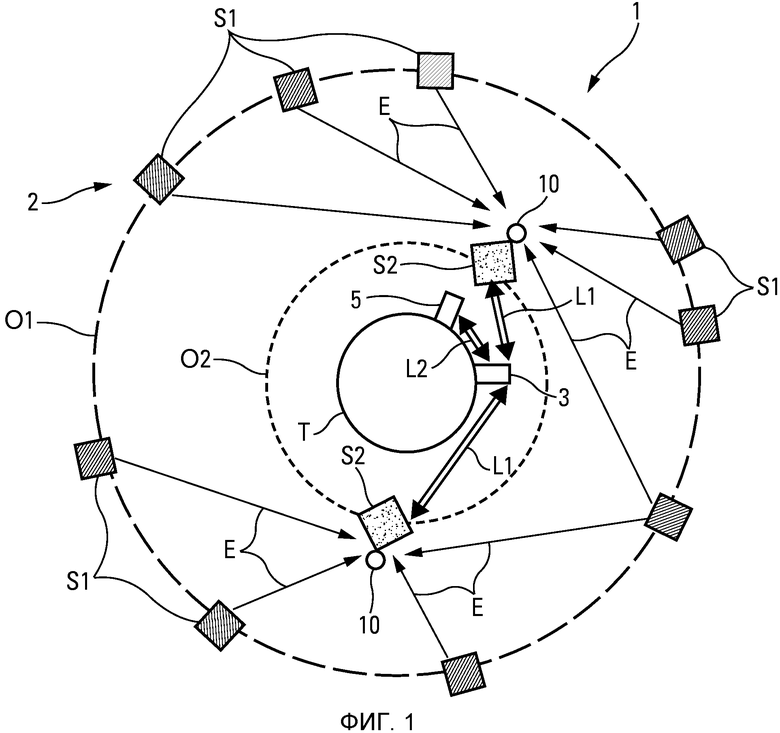
1. Система мониторинга для мониторинга сигналов позиционирования, излучаемых группировкой (2) спутников, принадлежащих системе позиционирования, причем упомянутая система (1) мониторинга содержит:
- по меньшей мере один спутник (S2) мониторинга, содержащий по меньшей мере следующие бортовые средства:
- по меньшей мере один приемник (9), способный напрямую принимать сигналы позиционирования, излучаемые спутниками (S1) упомянутой группировки (2) спутников; и
- по меньшей мере один излучатель (13), способный излучать в направлении Земли (Т) данные о целостности, указывающие, в случае наличия, спутник(и) упомянутой группировки (2) спутников, сигналы позиционирования которого (которых) ошибочные;
- по меньшей мере один центр (3) управления, расположенный на Земле, управляющий упомянутыми спутниками (S2) мониторинга, и содержащий средство (4), способное принимать данные о целостности, излучаемые такими спутниками (S2) мониторинга; и
- по меньшей мере один центр (5) распространения сообщений о целостности, расположенный на Земле (Т), и содержащий:
- средство (6) для приема данных о целостности от спутника (S2) мониторинга, передаваемых упомянутым центром (3) управления;
- средство (7) для определения из таких данных о целостности сообщении о целостности, относящихся к спутникам (S1) упомянутой группировки (2) спутников системы позиционирования; и
- средство (8) для излучения таких сообщений о целостности пользователям,
при этом упомянутый спутник (S2) мониторинга размещен на орбите (O2) на более низкой высоте, чем спутники (S1) упомянутой группировки (2) спутников, так чтобы иметь возможность принимать сигналы позиционирования, излучаемые такими спутниками (S1) по направлению к Земле (Е), и упомянутый спутник (S2) мониторинга дополнительно содержит по меньшей мере один блок (11) обработки, формируемый так, чтобы проверять целостность принятых сигналов позиционирования, с использованием информации позиционирования, независимой от таких сигналов позиционирования, чтобы определить, в случае наличия, спутники (S1), излучающие ошибочные сигналы позиционирования, и чтобы формировать соответствующие данные о целостности.
2. Система мониторинга по п.1, которая содержит множество спутников (S2) мониторинга.
3. Система мониторинга по п.1, в которой каждый спутник (S2) мониторинга дополнительно содержит бортовое вспомогательное средство (19), позволяющее определить первую позицию в пространстве упомянутого спутника (S2) мониторинга, без использования упомянутых сигналов позиционирования, излучаемых спутниками (S1) упомянутой группировки (2) спутников, и упомянутый блок (11) обработки содержит:
- первое средство (19) для вычисления по меньшей мере одной второй позиции, с помощью упомянутых сигналов позиционирования, принимаемых от спутников (S1) группировки (2) спутников;
- второе средство (21) для сравнения между собой упомянутых первой и второй позиции; и
- третье средство (21) для формирования вывода на основании этого, в случае наличия, о существовании ошибочных сигналов позиционирования.
4. Система мониторинга по п.3, в которой:
- упомянутое первое средство (19) формируется таким образом, чтобы вычислять множество вторых позиций, каждая из упомянутых вторых позиций вычисляется с помощью сигналов позиционирования, принимаемых от подгруппы спутников упомянутой группировки (2) спутников, каждая упомянутая подгруппа содержит одинаковое предварительно определенное первое количество спутников, и любые две подгруппы в любой момент в общем имеют не более второго предварительно определенного количества спутников;
- упомянутое второе средство (21) формируется таким образом, чтобы сравнивать каждую из этих вторых позиций с упомянутой первой позицией; и
- упомянутое третье средство (21) формируется таким образом, чтобы определять, в случае наличия, спутник(и), сигналы позиционирования которого (которых) являются ошибочными, с использованием результатов сравнения, реализованного упомянутым вторым средством (21), и состав упомянутых подгрупп.
5. Система мониторинга по п.1, в которой каждый спутник (S2) мониторинга дополнительно содержит одну приемную антенну (10), связанную с упомянутым приемником (9), позиционированную так, чтобы избежать многолучевого распространения, и окруженную одним электромагнитным защитным экраном для удаления режимов распространения, которые способны нарушить прием сигналов антенной.
6. Система мониторинга по п.1, в которой каждый спутник (S2) мониторинга размещен на орбите (O2), которая имеет высоту большую, чем высота плотных слоев ионосферы.
7. Система мониторинга по п.1, в которой каждый спутник (S2) мониторинга размещен на орбите (О2), плоскость которой отличается от плоскостей орбит (O1) спутников (S1) упомянутой группировки (2) спутников.
8. Система мониторинга по п.1, в которой упомянутые центры управления и распространения принадлежат единому центру администрирования.
9. Система мониторинга по п.1, в которой упомянутый центр (3) управления дополнительно содержит:
- средство (24) для удаленного управления каждым спутником (S2) мониторинга; и
- средство (25) для вычисления параметров орбит каждого спутника (S2) мониторинга и для обновления блоков (11) обработки на борту каждого спутника (S2) мониторинга.
10. Система мониторинга по п.1, в которой упомянутый центр (5) распространения дополнительно содержит средство (28) кодирования для кодирования сообщений о целостности перед их отправкой пользователям.
| ЕР 1876465 А1, 09.01.2008 | |||
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| US 2004193373 A1, 30.09.2004 | |||
| US 2006214844 A1, 28.09.2006. | |||

