Изобретение относится к разделу пилотируемой космонавтики, а именно к области функционирования спутниковой навигационной системы (СНС) ГЛОНАСС. Использование услуг, предоставляемых системами космической навигации для наземных потребителей, давно вошло в повседневный обиход. Для позиционирования в условиях открытого космоса эта услуга практически не применялась, лишь сравнительно недавно для определения положения космических аппаратов в пространстве стали применять навигационные приемники ГЛОНАСС/GPS (Институт космических исследований РАН, Таруса, опубл. 22-25 сентября 2008 г.) /1/.
На данный момент СНС ГЛОНАСС состоит из подсистемы навигационных космических аппаратов (НКА) и наземной подсистемы контроля и управления (НКУ), состоящей из центра управления, центрального синхронизатора системы, командно-измерительных систем, системы управления, измерения и контроля, аппаратуры контроля навигационного поля и радиоконтроля орбиты спутников квантово-оптической (лазерной) измерительной системы. Все средства НКУ расположены на территории России. В НКУ системы ГЛОНАСС входит информационно-аналитический центр ЦНИИмаш, который обеспечивает формирование стратегии развития и решения практических задач навигационно-временного обеспечения (ПВО), в том числе и обеспечением высокоточной эфемеридно-временной информацией (ЭВИ), необходимой для определения местоположения наземных потребителей услуг навигационных систем. ЭВИ обеспечение поддерживается комплексом технических и программных средств, выполняющих радиоконтроль орбит спутников с нескольких наземных станций спутниковых радионавигационных систем (СРНС) контроля; обработку результатов траекторных измерений и расчет ЭВИ, передаваемой далее с помощью загрузочных станций на спутник. Таким образом, по результатам доступных наблюдений сети станций СРНС и наблюдения в вычислительном центре главной командной станции рассчитываются параметры орбит, которые в дальнейшем загружаются на НКА. Каждый НКА излучает в составе передаваемого сигнала навигационное сообщение, сформированное им на основе данных закладываемых наземной подсистемой контроля один - два раза в сутки. Эфемеридно-временная информация - это полученная расчетным методом область предположительного местонахождения НКА в определенный момент времени. При существующем подходе к построению СРНС максимально возможный объем расчетов разработчики стараются перенести на наземный комплекс управления, поскольку информационные ресурсы самих НКА ограничены. В системе ГЛОНАСС используется дифференциальная модель движения. Это означает, что для определения координат спутника на заданный момент времени требуется решить систему дифференциальных уравнений. Для решения этой системы нужны начальные значения. В случае СНС ГЛОНАСС эти приближения передаются со спутника в составе навигационной информации. (Информационно-аналитический центр Центральный научно исследовательский институт ЦНИИмаш. Федеральное космическое агенство, опубл. в интернете http://www.glonass-center.ru) /2/.
Источником для расчета высокоточных ЭВИ и частотно-временных поправок НКА становятся измерения, которые производятся распределенной по поверхности Земли сетью беззапросных измерительных станций. Измерения производятся сетью станций радиотехнических средств сверхдлинной базы и квантово-оптических систем (данные российских и международных сетей лазерной дальнометрии спутников). В результате расчетов формируются таблично представляемые высокоточные ЭВИ и частотно-временные поправки к НКА, описывающие положение спутников ГЛОНАСС в пространстве и времени. В данный момент основной задачей, стоящей перед глобальной навигацией, состоит в повышении точности измерения. Согласно данным, изложенным в Федеральной целевой программе «ГЛОНАСС 2012-2020», система ГЛОНАСС должна сравняться по точности с системой GPS до 2015 г. (Федеральная целевая программа. «Поддержание, развитие и использование системы ГЛОНАСС на 2012-2020 годы», опубл. в интернете fcp.economy.gov.ru) /3/.
Ширина диаграммы направленности передаваемых спутниками GPS навигационных сигналов позволяет обеспечивать непрерывное навигационное поле на высотах до 3000 км от поверхности Земли. Непрерывность навигационного поля системы ГЛОНАСС обеспечивается на высотах до 2000 км. При этом каждый спутник излучает навигационные сигналы в направлении на Землю в телесном угле ±19°. (Глобальная навигационная спутниковая система ГЛОНАСС. Параметры радионавигационного поля ГЛОНАСС. Технические требования и методы испытаний, опубл. в 2010 г. ГОСТ Р 52865-2009) /4/.
К недостаткам использования СНС ГЛОНАСС в нынешнем состоянии относится следующее: недостаточно высокая точность, что обусловлено использованием ЭВИ, параметры которой определяются расчетными методами подсистемой контроля. (Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ ИКД ГЛОНАСС. Редакция 5.0 2002) /5/.
Известны проекты открытого акционерного общества «Научно-производственная корпорация «Системы прецизионного приборостроения». ОАО «НПК «СПП» является головным исполнителем ряда ОКР по федеральной целевой программе (ФЦП) «Глобальная навигационная система». Эта программа направлена на дальнейшее развитие и эффективное использование глобальной навигационной спутниковой системы ГЛОНАСС за счет внедрения передовых технологий спутниковой навигации. Проект ОАО «НПК «СПП» по созданию межспутниковой лазерной навигационно-связной системы (МЛНСС) предназначен для обеспечения сверки шкал времени НКА ГЛОНАСС, а также для межспутниковых, помехозащищенных обменов информацией. Развертывание МЛНСС на всех НКА ГЛОНАСС позволит получить в перспективе принципиально новое возможности СНС ГЛОНАСС. Устройство терминала МЛНСС устанавливается на НКА и обеспечивает лазерную линию связи в своей плоскости. В дальнейшем появляется возможность установить лазерную связь между плоскостями, но для этого потребуется установка дополнительных терминалов МЛНСС, что в условиях ограниченных возможностей энергосистемы НКА достаточно проблематично. Этот способ на данный момент, рассматривается как единственный прямой способ повышения точности ЭВИ. (ОАО «Научно-производственная корпорация «Системы прецизионного приборостроения», опубл. в интернете www.npk-spp.ru) /6/.
Недостатками предлагаемого проекта по использованию межспутниковой лазерной навигационно-связной системы является то, что в результате реализации проекта повышается помехозащищенность, увеличивается скрытность и расширяется объем межспутниковой информации, но не обеспечивается получение достоверных навигационных данных о положении НКА. Проект столкнулся с решением ряда сложных технических задач, в связи с чем его реализация в ближайшей перспективе проблематична.
Известен проект, реализованный совместно Федеральным космическим агентством, Институтом космических исследований Российской Академией Наук, Центром космических исследований - CESR/CNRS (Франция), Мерилендским университетом (США) и университетом Оулу (Финляндия). Проект получил международное название «Резонанс» и его научные проработки изложены на сайте Роскосмоса и сайте Российской Академии Наук (http://www.federalspace.ru и iki.rssi.ru/resonance) /7/.
Данный международный проект направлен на длительное по времени исследование взаимодействия волн и частиц во внутренней магнитосфере Земли с одновременным наблюдением за естественными явлениями в выбранной силовой линии магнитного поля. Для обеспечения проведения «тонких» экспериментов по искусственному возбуждение и стимуляция волн, вопросам точного определения времени и места нахождения спутников, участвующих в проекте «Резонанс», придается главенствующее значение, поскольку эксперимент должен синхронно проходить как в космосе, так и на Земле. Так стимуляция в определенном месте волны должна синхронно отслеживаться аппаратурой на Земле.
В проекте «Резонанс» выделен специальный раздел, посвященный использованию навигационных систем GPS (www.iki.rssi.ru/resonanc) /7/, поскольку только с ее помощью удается определить точное время и место эксперимента. С этой целью для решения поставленной навигационной задачи, в проекте «Резонанс» учитывается не только основной, но и боковой лепесток диаграммы направленности НКА. При учете бокового лепестка расширяется зона видимости и ситуация со временем, когда удается определить навигационную составляющую, существенно увеличивается. Однако решение этого вопроса в рамках данного проекта требует дополнительной проработки.
Это связано с тем, что мощность излучения в боковом лепестке ниже, чем в основном, поэтому для уверенного приема сигнала необходима более высокая чувствительность приемника.
К недостаткам данного предложения можно отнести следующее:
1. Технические решения, предложенные в данном проекте, не позволяют решить навигационную задачу для каждого НКА, входящего в СНС ГЛОНАСС.
2. Невозможность переноса решения задач по поддержанию целостности навигационного поля СНС ГЛОНАСС, непосредственно на орбиту.
3. В проекте используется приемник сигналов радионавигационной системы глобального спутникового позиционирования GPS (Global Position System).
За прототип принимаем наиболее близкий по технической сущности к заявляемой заявке Патент на изобретение - Бортовая аппаратура межспутниковых измерений (БАМИ) (RU 2504079 U1, МПК Н04В 7/185 G01C 21/24 опубл. 10.01.2014 /8/.
Изобретение относится к области космической межспутниковой связи (МС) и предназначено для обеспечения автономности функционирования космической спутниковой навигационной группировки ГЛОНАСС на срок до 30 суток, повышения точности эфемеридного и частотно-временного обеспечения системы, оперативной доставки специальной информации (СИ), в функции которой входит передача и прием командно-программной и телеметрической информации, оперативного контроля целостности космической системы, чем обеспечивается снижение нагрузки на вычислительные средства НКУ СНС ГЛОНАСС. Согласно изобретению каждый спутник СНС ГЛОНАСС оснащен комплектами БАМИ, в состав которого входит: приемопередающая антенна (ППА), входной усилитель приемника, радиоприемное устройство, модульный контроллер управления (МКУ), блок логики и коммутации (БЛИК), через который МКУ обеспечивает информацией, выделенной в радиоприемном устройстве, бортовой центральный вычислительный комплекс (БЦВК) НКА. Питание БАМИ обеспечивает источник вторичного электропитания, который находится в БЛИК, передающая часть БАМИ состоит из формирователя радиосигнала, радиопередающего устройства, нагруженного на циркулятор и через него на приемопредающую антенну.
Данным изобретением решаются задачи формирования и передачи СИ для приема их на всех НКА ГЛОНАСС, находящихся в зоне радиовидимости. Прием и передача СИ позволяет решить вопросы определения псевдодальностей и псевдоскоростей НКА, входящих в состав СНС ГЛОНАСС. С этой целью в 5-секундном интервале межспутникового обмена 3.5 секунды выделены на передачу навигационных параметров, остальное время используется для передачи СИ, обеспечивающей техническую поддержку функционирования СНС ГЛОНАСС (Болденков Евгений Николаевич. Разработка и исследование оптимальных алгоритмов обработки сигналов в аппаратуре спутниковой навигации. Диссертационная работа. М., 2007 г., 226 с.) /9/.
К недостаткам данного устройства можно отнести следующее:
1. Недостаточно высокая точность определения системой БАМИ навигационной составляющей, поскольку определение псевдоскорости и псевдодальности производится на основании данных сформированных на базе ЭВИ.
2. Передача навигационной информации производится на частотно-преобразованном в миллиметровый диапазон сигнале /9/.
3. В отсутствие оперативного контроля целостности навигационного поля как отдельного НКА, так и всей системы в целом.
4. В ограниченных объемах передаваемой служебной информации, поскольку в 5- секундном интервале на передачу СИ выделяется лишь 1,5 секунды /9/.
Задача, решаемая настоящим изобретением, состоит в решении навигационной задачи для каждого НКА - это достигается путем разделения информационных потоков - по каналам БАМИ производится передача СИ, а также в режиме реального времени локального навигационного поля для каждого НКА группировки ГЛОНАСС. Условия формирования локального навигационного поля реализуются за счет приема радионавигационных сигналов, принимаемых с боковых лепестков диаграмм направленности НКА, находящихся в пределах радиовидимости.
Формирование локального навигационного поля позволяет в обслуживаемом пространстве проводить измерения навигационных параметров и соответственно определить местоположение НКА в реальном времени /4/.
Предлагаемая схема работает следующим образом.
Согласно /4/ среднеквадратическое значение ошибок прогнозирования положения спутников не превышают:
Поскольку местоположение каждого НКА в пространстве достаточно жестко регламентировано, - это создает необходимые и достаточные условия для уточнения их реального положения.
Алгоритм, заложенный в основу современной спутниковой навигации, позволяющий производить навигационные измерения, основан на использовании принципа беззапросных дальномерных измерений в среде между навигационными спутниками и потребителем. Это означает, что потребителю в составе навигационного сигнала передается информация о координатах всех спутников, входящих в СНС ГЛОНАСС, так называемый альманах системы. Одновременно (синхронно) производятся измерения дальностей до НКА. Способ измерений дальномерного сигнала основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя. Чем менее стабилен источник времени потребителя, тем менее точным получается процесс измерения и тем менее точным получается результат. В качестве эталона времени UTC спутниковой системы ГЛОНАСС используется стандарт частоты, суточная нестабильность которого составляет 5×10-13 /5/. За счет этого результаты измерений, получаемые на орбите, имеют максимально высокую точность определения. Для получения полного набора параметров (координат, скорости и точной привязки времени) необходимо принимать одновременно сигналы не менее чем от четырех навигационных спутников (Спутниковая навигация. Методы и средства. Карлащук В.И., Карлащук С.В. опубл. 2006 г.) /10/.
Для реализации предложенной схемы требуется осуществлять обмен навигационной информацией между спутниками как в пределах одной орбитальной плоскости, так и в рамках всего орбитального созвездия в целом. Для этих целей необходима установка на НКА антенны, многолучевая диаграмма направленности которой обеспечивает прием сигналов с боковых лепестков диаграмм направленности не менее чем от 4-х НКА, находящихся в зоне радиовидимости.
После выделения навигационной составляющей происходит сравнение в режиме реального времени, полученных данных с данными ЭВИ заложенными в НКА БЦВК. Это позволит оперативно включать уточненные навигационные параметры в формируемый навигационный сигнал НКА. Изменение положения НКА может происходить в силу воздействия на него различных внешних факторов, учесть которые и заложить эти данные в ЭВИ в долгосрочной перспективе не представляется возможными. Одновременно обеспечивается оперативный контроль над функционированием СНС ГЛОНАСС, поскольку происходит контроль целостности навигационного поля всей системы, что позволяет оперативно проводить запись каждым спутником признака недостоверности собственного навигационного сигнала. В связи с тем, что контроль целостности навигационного поля в настоящее время производится лишь над территорией России, то оповещение потребителей о возникших неполадках в СНС ГЛОНАСС возможно лишь спустя длительное время. Фактически, когда речь идет о целостности параметров СНС ГЛОНАСС, основной информацией являются данные о состоянии спутников, их неисправностях, о возможных искажениях сигналов в каналах передачи информации, об отказах и недопустимых ошибках оценок навигационных параметров в бортовой аппаратуре - те параметры, большую часть которых становится возможным контролировать непосредственно на орбите.
Указанные технические результаты достигается за счет того, что каждое НКА, оснащенное БАМИ, в состав которого входит: первая приемопередающая антенна (ППА1), входной усилитель приемника, радиоприемное устройство, блок логики и коммутации, формирователь радионавигационного сигнала, модульный контроллер управления, через который осуществляется обмен информацией с БЦВК НКА, питание БАМИ обеспечивает источник вторичного электропитания, который размещается в блоке логики и коммутации, согласно изобретению вводится: приемник спутниковой навигации ГЛОНАСС, а также приемопередающая антенна 2 (ППА2) с многолучевой диаграммой направленности. При этом вход питания БЛИК подключен к 27-вольтовому источнику главной энергетической установки НКА, также к 27-вольтовому источнику подключены ППА1 и ППА2, вторичное электропитание с БЛИК обеспечивает питающим напряжением входной усилитель приемника, радиоприемное устройство, модульный контроллер управления, приемник ГЛОНАСС, а также формирователь радиосигнала и радиопередающее устройство, выделенный сигнал с выхода ППА2 попадает на вход приемника ГЛОНАСС, с выхода приемника навигационный сигнал через внутреннюю информационную магистраль попадает в БЦВК НКА. В БЦВК происходит сравнение полученных данных с данными ЭВИ альманаха СНС ГЛОНАСС. В случае если полученные данные и данные из альманаха совпадают, то навигационный сигнал, излучаемый НКА, не претерпевает изменений; в случае несовпадения излучаемый навигационный сигнал корректируется в соответствии с данными, полученными на основании прямых измерений, что в конечном итоге обеспечивает поддержание и функционирование на орбите собственной Орбитальной системы координат (ОСК). ОСК позволяет оперативно реагировать на различные внешние факторы, которые невозможно предусмотреть при длительном прогнозировании. Данная информация может быть «сброшена» на подлете к ПКУ, что позволит анализировать полученные данные и в дальнейшем использовать их.
На чертеже изображена функциональная схема устройства.
Устройство содержит входной усилитель приемника 1, входом соединенный с выходом ППА 1, а выходом - с входом радиоприемного устройства 2, выход радиоприемного устройства 2 через блок логики и коммутации 3, модульный контроллер управления 4 и внутреннюю информационную магистраль 11 соединен с входом БЦВК 12 НКА, что составляет основной канал получения СИ. Канал получения навигационной информации состоит из ППА 2, с выхода которой выделенный сигнал попадает на вход приемника ГЛОНАСС 10, с выхода которого навигационная составляющая через внутреннюю информационную магистраль 11 подается в БЦВК 12. В БЦВК 12 полученные данные по скорости, времени, местоположению НКА, а также параметры бортового стандарта частоты и времени сравниваются с данными, находящимися в альманахе СНС ГЛОНАСС. Выход формирователя радиосигналов 5 снабжает модульный контроллер управления 4 набором опорных сигналов. Вход питания БЛИК 3 подключен к 27 вольтовому источнику главной энергетической установки НКА, к 27 вольтовому источнику также подключены ГИТА 1 и ГИТА 2 НКА, вторичное электропитание с БЛИК 3 обеспечивает питающим напряжением входной усилитель приемника 1, радиоприемное устройство 2, модульный контроллер управления 4, приемник ГЛОНАСС 10, а также формирователь радиосигнала 5 и радиопередающее устройство 6. Циркулятор 7 коммутирует излучаемый и принимаемый поток СИ межспутникового обмена.
Важнейшим вопросом, решаемым изобретением, является вопрос контроля целостности навигационного поля и соответственно повышения достоверности передаваемой информации всей СНС ГЛОНАСС за счет создания и функционирования на орбите собственной ОСК. Качество контроля целостности информации любой системы, в том числе и СНС ГЛОНАСС, характеризуется способностью самой системы обнаруживать свое некорректное функционирование и своевременно информировать о недопустимых отклонениях рабочих характеристик системы. Особенно важна эта информация для решения навигационной задачи быстрыми пользователями, такими как ракеты, самолеты , особенно в режиме посадки и дозаправки. Одновременно облегчается работа наземной системы НКУ за счет сокращения объемов подготовки, обработки и передачи рутинной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ АППАРАТУРА МЕЖСПУТНИКОВЫХ ИЗМЕРЕНИЙ (БАМИ) | 2012 |
|
RU2504079C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| Система контроля целостности глобальной навигационной спутниковой системы, например, системы ГЛОНАСС, с использованием межспутниковых измерений | 2023 |
|
RU2828675C1 |
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
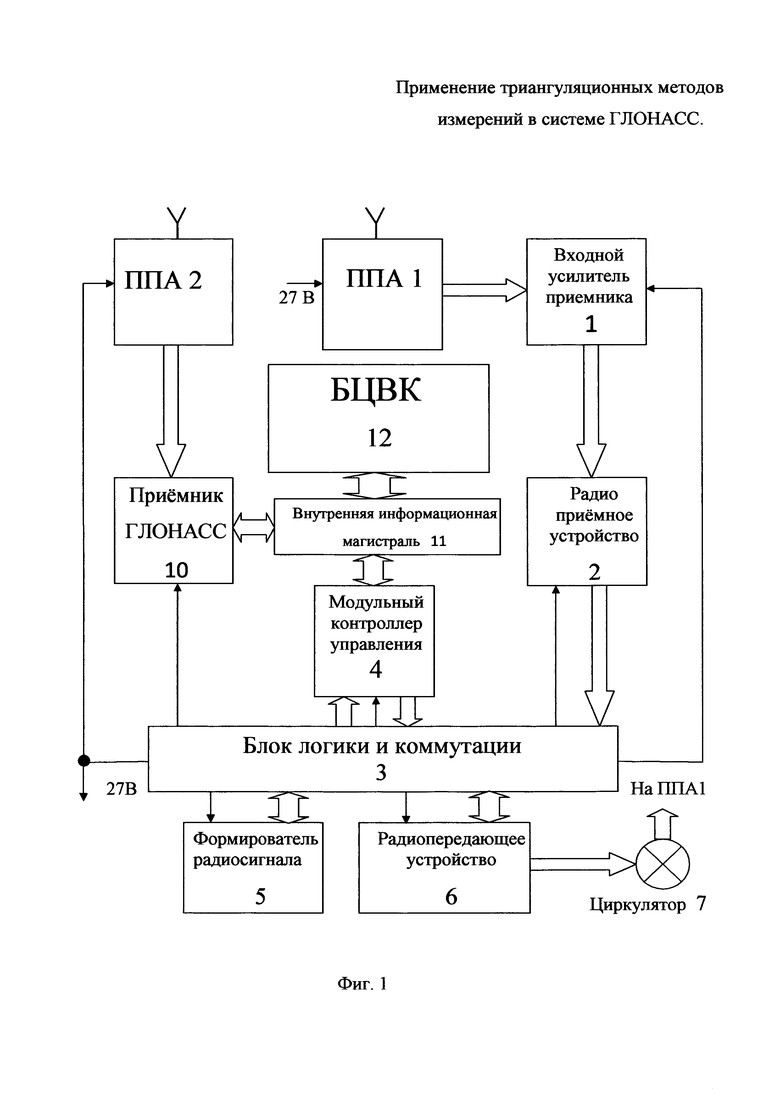
Изобретение относится к спутниковым системам навигационных космических аппаратов (НКА). Cлужебная информация выделяется в первой приемопередающей антенне (ППА 1), усиливается в приемном устройстве (1) и попадает через блоки (2), (3), (4), (11) в бортовой центральный вычислительный комплекс (БЦВК) (12). Навигационный сигнал от спутников, находящихся в пределах радиовидимости, принимается ППА 2, преобразуется в приемнике (10) и также попадает в БЦВК (12). Дальномерные сигналы от упомянутых спутников формируют с участием блоков (5, 6, 7) локальное навигационное поле. Т.к. все НКА системы (например, ГЛОНАСС) одновременно связаны путём обмена радионавигационными сигналами, то создаются условия для формирования собственной орбитальной системы координат (ОСК). ОСК обеспечивает позиционирование всех НКА в реальном времени, что позволяет вносить уточняющие коррективы в излучаемый радионавигационный сигнал НКА. Тем самым достигается оперативность контроля и информирования о целостности навигационного поля НКА, синхронности бортовых шкал времени НКА и главных параметрах радионавигационного сигнала. Сокращаются объемы рутинной работы на Земле. Технический результат состоит в повышении точности и надёжности работы спутниковой системы. 1 ил.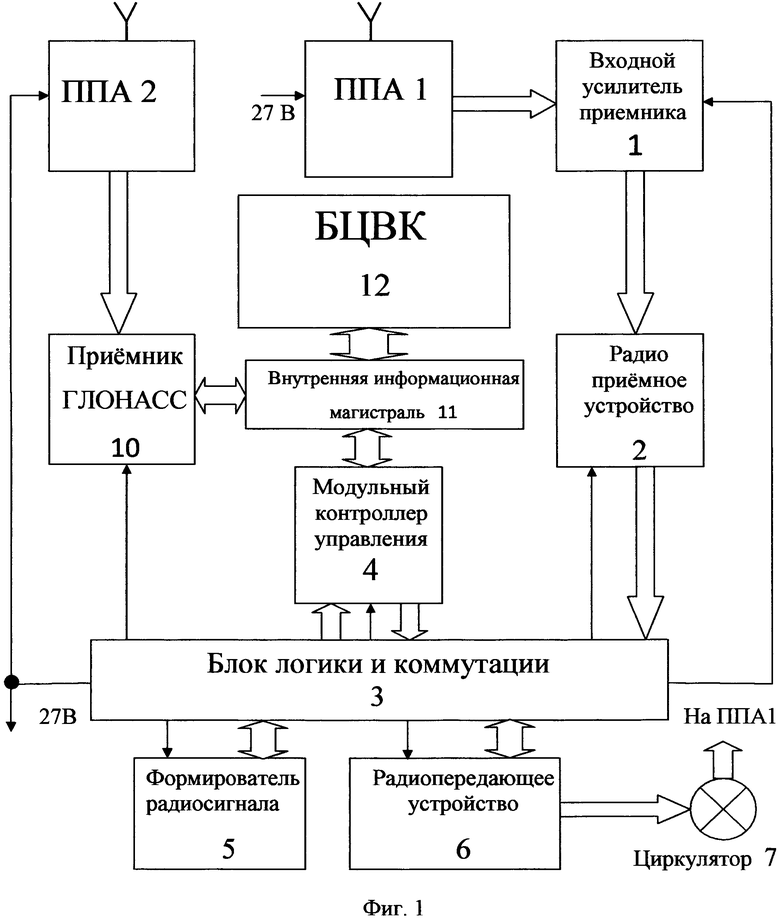
Система бортовой аппаратуры межспутниковых измерений, применяемая в орбитальной спутниковой группировке ГЛОНАСС, содержащая: первую приемопередающую антенну, входной усилитель приемника, радиоприемное устройство, модульный контроллер управления, блок логики и коммутации, через который модульный контроллер управления обеспечивает навигационной информацией бортовой центральный вычислительный комплекс, источник вторичного электропитания, который находится в блоке логики и коммутации, причем передающая часть устройства состоит из формирователя радиосигнала, радиопередающего устройства, нагруженного на циркулятор и далее на первую приемопередающую антенну, отличающаяся тем, что в нее введены вторая приемопередающая антенна с многолучевой диаграммой направленности и приемник спутниковой навигации ГЛОНАСС, при этом вход питания блока логики и коммутации подключен к главной энергетической установке на борту навигационного спутника, к которой также подключены первая и вторая приемопередающая антенна, при этом источник вторичного электропитания с блока логики и коммутации обеспечивает питающими напряжениями входной усилитель приемника, радиоприемное устройство, модульный контроллер управления, приемник спутниковой навигации ГЛОНАСС, а также формирователь радиосигнала и радиопередающее устройство, причем выделенный сигнал с выхода второй приемопередающей антенны подается на вход приемника ГЛОНАСС, а с выхода приемника навигационный сигнал через внутреннюю информационную магистраль подается в бортовой центральный вычислительный комплекс.
| БОРТОВАЯ АППАРАТУРА МЕЖСПУТНИКОВЫХ ИЗМЕРЕНИЙ (БАМИ) | 2012 |
|
RU2504079C1 |
| Способ сжигания сернистого мазута | 1958 |
|
SU123176A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| US 8972184 B2, 03.03.2015 | |||
| EP 0611500 B1, 28.07.1999. | |||

