Область техники
Настоящее изобретение относится к глобальной системе, предназначенной для радионавигациии и определения местоположения мобильных устройств (например, спутников) и стационарных объектов. Изобретение также относится к радиомаякам и приемникам для использования в указанной системе.
Предшествующий уровень техники
К известным системам (вышеуказанного типа относятся система DORIS, система GPS (глобальная спутниковая система местоопределения), система GLONASS (глобальная спутниковая система навигации) и система PRARE.
Система DORIS описана в работах [1], [2] и [3].
Система GPS-NAVSTAR описана в работе [4].
Система GLONASS описана в работе [5].
Система PRARE описана в работе [6].
Задачей изобретения является создание универсальной системы радионавигации и определения местоположения, характеризуемой более высокой точностью и более эффективной при решении различных задач радионавигации и местоопределения, чем упомянутые выше системы, известные из предшествующего уровня техники.
Изобретение может быть использовано в составе системы GNSS (глобальной системы космической навигации), т.е. во всех глобальных радионавигационных системах, использующих космический сегмент и короткие коды расширения спектра.
Сущность изобретения
Настоящее изобретение относится к глобальной системе, предназначенной для радионавигации и радиоопределения местоположения мобильных и стационарных объектов, отличающейся тем, что она содержит сегмент наземного базирования, сегмент космического базирования и сегмент пользователей, при этом сегмент наземного базирования включает в себя следующие элементы:
основную сеть радиомаяков на земной поверхности, излучающих однонаправленные радиосигналы с широким спектром в направлении пользовательских спутников, причем каждый из этих радиомаяков передает сообщение, содержащее код идентификации радиомаяка;
центр управления, предназначенный для формирования планов функционирования для определенных пользовательских спутников и его передачи при пролете этих спутников над ведущими радиомаяками;
центр обработки, предназначенный для приема дистанционных измерений, отсортированных центром управления, разделения дистанционных измерений на две группы, одна из которых содержит дистанционные измерения, необходимые для процедур обработки, осуществляемых в центре обработки, а другая содержит дистанционные измерения, требуемые пользователям услуг, предоставляемых указанной системой;
при этом сегмент космического базирования включает в себя ведущие спутники и пользовательские спутники, причем ведущие спутники совместно участвуют в работе системы, а пользовательский сегмент состоит главным образом из мобильных устройств, имеющих специализированные приемники, и стационарных пользовательских радиомаяков.
Наземные радиомаяки предпочтительным образом выполнены двух типов, более конкретно, включают в себя радиомаяки построения орбит, положение которых точно известно и которые непрерывно передают сигнал и периодически передают данные своего местоположения (в некоторых случаях также и их скорость);
пользовательские радиомаяки, которые могут иметь первоначально неизвестное местоположение на начальном этапе ввода их в обслуживание;
ведущие радиомаяки, которые передают полезную информацию и планы функционирования на определенные пользовательские спутники и/или на приемную часть системы.
Система также содержит автономный локальный приемник и ячейки радиомаяков, не обязательно соединенные радиоканалом со спутниками в упомянутой системе.
Центр обработки предпочтительно вырабатывает следующие выходные данные:
точные данные для построения орбит и процедурные команды для пользовательских спутников;
точные данные пространственного положения пользовательских спутников;
характерные параметры ионосферы;
данные текущего контроля смещения радиомаяков, предназначенных для определения орбит;
коэффициенты времени для радиомаяков, опорные данные по отношению к системному времени, собственно системное время, вырабатываемое центром обработки;
параметры вращения Земли;
причем указанные данные распределяются, во-первых, пользователям услуг, предоставляемых системой в соответствии с изобретением, и возвращаются в центр управления, который использует их для формирования планов их работы и программирования, и для обеспечения стандартных орбит для станций дистанционных измерений и дистанционного управления, использующих услуги, предоставляемые системой, соответствующей изобретению.
Ведущие спутники могут быть оснащены специальным приемником, соединенным с высокостабильным генератором; необработанные измерения, осуществленные этим приемником, и данные, полученные от радиомаяков, форматируются в форме дистанционных измерений, принятых наземным пунктом, причем центр обработки используется в качестве конечного адресата. Ведущие спутники имеют возможность обработки сообщения, переданного ведущими радиомаяками.
Ведущие спутники имеют орбиты квази-гелиосинхронного типа, возможно, как маловысотные околоземные орбиты, так и/или геостационарные орбиты.
Для пользовательских спутников не является обязательной адресация их дистанционных измерений центру обработки. Также для пользовательских спутников не является обязательной обработка сообщения, переданного ведущими радиомаяками.
Пользовательские спутники могут находиться на орбите любого типа и одновременно могут формировать часть сегмента космического базирования и сегмента пользователей системы.
Пользовательские радиомаяки главным образом представляют собой радиомаяки для определения местоположения и радиомаяки для определения времени.
Предпочтительно радиомаяки подсоединены к микрокомпьютеру, используемому для программирования параметров радиомаяков и для проверки корректности их функционирования.
Микрокомпьютер предпочтительно соединен с локальными измерительными датчиками, такими как
датчики метеоданных,
датчики необработанных данных измерений глобальной космической системы навигации,
датчики коэффициентов времени,
датчики определения состояния различных элементов, входящих в состав радиомаяка, для обеспечения дистанционной диагностики неисправностей в центре управления,
датчики калибровки.
Радиомаяки могут быть выполнены как одночастотные или как двухчастотные.
Система, соответствующая изобретению, включает в себя прецизионные радиомаяки.
В упомянутой системе два радиомаяка, которым выделен идентичный псевдошумовой (ПШ) код и которые номинально будут отслеживаться одним спутником, селектируются по дальности, превышающей диаметр круга наблюдаемости для упомянутого спутника.
Предпочтительно, сигналы несущих частот, передаваемые радиомаяками, модулируются коротким кодом расширения спектра (называемым опорным кодом).
Система, соответствующая изобретению, может содержать одночастотные или двухчастотные приемники.
Прецизионные радиомаяки могут быть выполнены как двухчастотные, причем каждая передаваемая несущая частота модулируется длинным кодом расширения спектра (называемым прецизионным кодом) и коротким кодом (называемым опорным кодом).
Предпочтительно система, соответствующая изобретению, включает в себя орбитальные приемники или приемники, размещенные вблизи земной поверхности (стационарные или мобильные).
Приемники могут представлять собой следующие:
базовые приемники,
дешевые навигационные приемники,
дешевые приемники навигации и определения пространственного положения,
приемники навигации и определения пространственного положения,
приемники навигации, определения орбиты и прецизионного определения пространственного положения,
приемники смешанного типа, обеспечивающие обработку сигналов, переданных системными радиомаяками и спутниками, входящими в созвездие глобальной навигационной системы.
Система, соответствующая изобретению, может содержать приемники, обеспечивающие обработку только опорных кодов, и приемники, обеспечивающие обработку опорных кодов и прецизионных кодов одновременно (прецизионные приемники).
Система, соответствующая изобретению, может содержать прецизионную подсистему текущего контроля дрейфа орбитальных атомных часов.
В системе, соответствующей изобретению, последовательность излучений от пользовательских радиомаяков (если они есть) может управляться на основе суточного цикла, описываемого посредством "Week Words" ("кодовые слова недели").
В одном из вариантов осуществления конструктивные, электрические и антенные характеристики всех наземных радиомаяков сходны, за исключением следующих:
радиомаяков, предназначенных для прецизионного текущего контроля дрейфа орбитальных атомных часов, имеющих антенны с направленными диаграммами, вместо антенн с диаграммой типа полусферы;
радиомаяков локальных автономных ячеек, которые могут иметь диаграмму направленности антенны определенного типа.
Во взаимосвязи с методом интерферометрического построения изображений с использованием спутников-носителей радиолокаторов с синтезированной апертурой, система, соответствующая изобретению, может быть использована для точного текущего контроля деформаций местности, покрытой сеткой радиомаяков, сигналы которых принимаются приемником в упомянутой системе, установленным на спутниках- носителях РЛС.
Посредством использования движущихся по орбитам или геостационарных спутников, имеющих на борту приемник упомянутой системы, можно обеспечить получение детальной информации о разностях времен между часами радиомаяков, в частности на радиомаяках для определения данных времени.
Навигационные спутники типа GNSS2 могут использовать приемник упомянутой системы для решения своих навигационных задач и для формирования таблиц параметров орбит и эфемерид, доставляемых пользователям упомянутых спутников типа GNSS2.
Система, соответствующая настоящему изобретению, может включать в себя локальные автономные ячейки радиомаяков и приемников, причем эти ячейки в некоторых случаях могут быть соединены по радиоканалу с ведущими или пользовательским спутниками.
Изобретение относится к радиомаякам, предназначенным для использования в упомянутой системе, отличающимся тем, что они содержат
один или несколько датчиков локальных данных,
управляющий компьютер, соединенный с упомянутым датчиком данных,
генератор опорного сигнала, управляемый упомянутым осциллятором,
модуль генерирования и передачи сигнала для каждой передаваемой несущей частоты, управляемой генератором опорного сигнала, причем этот модуль содержит
генератор несущей частоты,
генератор короткого кода расширения спектра,
блок форматирования данных, управляемый управляющим компьютером, причем упомянутые данные модулируют упомянутый короткий код в полосе модулирующих сигналов посредством интегратора, а полный сформированный блок данных модулирует несущую посредством модулятора, антенну, соединенную с модулятором через радиочастотный усилитель
Предпочтительно несущие частоты, передаваемые радиомаяком, определены для данной системы.
Прецизионный радиомаяк передает двухчастотный сигнал. В прецизионном радиомаяке такого типа по меньшей мере один из двух модулей генерирования и передачи сигнала содержит
генератор длинного кода расширения спектра,
интегратор, обеспечивающий модуляцию упомянутого длинного кода сообщением с выхода блока форматирования данных,
модулятор несущей, использующий длинный код, интегрированный с данными,
фазовращатель на π/4 для упомянутой модулированной несущей, сумматор, интегрирующий несущую, модулированную длинным кодом, в квадратуре с несущей, модулированной коротким кодом
Прецизионный радиомаяк данного типа передает длинные коды на несущих частотах, выделенных для данной системы.
Изобретение также относится к приемнику для использования в упомянутой системе, отличающемуся тем, что он содержит для каждой принимаемой несущей частоты
от одной до четырех приемных антенн,
от одного до четырех модулей приема на радиочастоте и преобразования на промежуточную частоту, которые могут представлять собой радиочастотные микросхемы, соединенные с аналого-цифровым преобразователем, причем указанные модули соответствуют несущей частоте, принимаемой от упомянутой системы,
одну или несколько специализированных интегральных схем (СИС), в частности предназначенных для обработки короткого кода расширения спектра, модулирующего принимаемую несущую, причем упомянутые СИС обеспечивают обработку коротких кодов упомянутой системы,
а также упомянутый приемник содержит
блок микропроцессора, взаимосвязанный с СИС и с памятью, и блок цифрового интерфейса,
генератор, в частности, управляющий модулями приема радиочастотного сигнала и преобразования на промежуточную частоту, СИС и блок микропроцессора.
Предпочтительно, модуль приема радиочастотного сигнала и преобразования на промежуточную частоту соединен с каждой антенной в случае приемников с параллельной архитектурой радиочастотного тракта, или единственный модуль приема радиочастотного сигнала и преобразования на промежуточную частоту подсоединен ко всем антеннам через быстродействующий переключатель в случае приемников с последовательной архитектурой радиочастотного тракта.
Предпочтительно, один из модулей приема радиочастотного сигнала и преобразования на промежуточную частоту в приемниках смешанного типа предназначен для работы на одной из двух частот, используемых в системе, соответствующей изобретению, в то время как другой модуль приема радиочастотного сигнала и преобразования на промежуточную частоту предназначен для работы в одной из частотных полос, используемых для передачи спутниками, входящими в созвездие глобальной спутниковой навигационной системы.
Предпочтительно, по меньшей мере одна из двух прецизионных систем приема предназначена для приема длинных кодов в упомянутой системе на несущих частотах упомянутой системы, СИС, связанные по меньшей мере с одной из двух приемных систем, обеспечивает одновременно обработку коротких кодов и длинных кодов, связанных с упомянутой приемной системой.
Система, соответствующая изобретению, является конкурентоспособной по отношению к системам GPS и GLONASS для большинства из космических применений. Она в еще большей степени является конкурентоспособной по отношению к современным системам DORIS и PRARE. Более того, система, соответствующая изобретению, потенциально является более эффективной, чем указанные системы, для большинства применений, связанных с использованием космических систем.
Краткое описание чертежей
На фиг.1 представлены различные компоненты системы, соответствующей изобретению.
На фиг.2 представлена схема опорного радиомаяка, соответствующего изобретению.
На фиг.3 представлены параметры излучения антенны для опорных радиомаяков.
На фиг.4 представлена схема прецизионного радиомаяка.
На фиг. 5 представлена диаграмма, иллюстрирующая работу различных типов радиомаяков ZZZ.
На фиг.6 представлена подсистема прецизионного измерения дрейфа атомных часов, установленных на спутнике.
На фиг.7 иллюстрируются круги наблюдаемости для спутника на высоте hi.
На фиг.8 представлены четыре круга наблюдаемости.
На фиг.9 и 10 иллюстрируется принцип построения набора радиомаяков, использующих сигналы с широким спектром.
На фиг.11 представлен пример выделения кодов спутникам определения орбит ZZZ.
На фиг 12 показано интерферометрическое изображение, построенное с помощью РЛС с синтезированной апертурой.
На фиг.13 и 14 иллюстрируется функционирование пользовательских спутников, содержащих батареи, подзаряжаемые от солнечных панелей.
На фиг.15, 16 и 17 представлены схемы ведущего спутника.
На фиг.18 представлена схема для базового приемника ZZZ.
На фиг.19, 20 и 21 иллюстрируются два других типа приемников ZZZ.
На фиг.22 представлена схема приемника смешанного типа GNSS-ZZZ.
На фиг.23 и 24 представлены примеры приемника ZZZ, обеспечивающего определение пространственного положения.
На фиг. 25 иллюстрируется функционирование антенны в случае спутника на низкой орбите.
На фиг.26 иллюстрируется космический канал связи между радиомаяком ZZZ и приемником ZZZ.
На фиг. 27А, 27В и 27С показаны три конфигурации опорного приемника для использования в системе, соответствующей изобретению.
На фиг.28 иллюстрируется исследование доплеровских параметров.
На фиг.29 приведена схематичная иллюстрация спутника, оснащенного двухчастотным приемником ZZZ.
На фиг. 30 приведен пример полезной нагрузки для навигационной системы GNSS2.
На фиг.31 представлен график, иллюстрирующий след на земной поверхности для спутника с высотой орбиты h2.
На фиг.32 и 33 иллюстрируются отклонения во времени, определяемые спутником.
Детальное описание вариантов осуществления изобретения
Система, соответствующая изобретению, предназначена главным образом для радионавигации и радиоопределения местоположения спутников и транспортных средств или стационарных объектов на поверхности Земли. Эта система будет сначала условно обозначена ZZZ, прежде чем будет определено ее окончательное наименование. В Национальном Центре космических исследований эта система получила название DORIS NG (система DORIS нового поколения).
Данная система ZZZ объединила в себе основные достоинства каждой из нынешних систем GPS и DORIS.
Система ZZZ, соответствующая изобретению, и перспективные космические навигационные системы гражданского назначения являются взаимно дополняющими и предназначены для обеспечения создания универсальной системы радионавигации и местоопределения, получившей название GNSS3. Данное обозначение можно условно выразить следующей формулой:
ZZZ+GNSS2=GNSS3
Потенциальные пользователи системы, соответствующей изобретению, классифицируются в соответствии с различными видами потребностей:
- Большинство спутников, для которых операционные потребности, связанные с синхронизацией бортовых/наземных подсистем, и/или с навигацией, и/или определением орбиты, и/или определением пространственного положения, совместимы с точностью, обеспечиваемой для этих потребностей, обычно лучше, чем в современных системах GPS и DORIS. Опорные траектории этих пользовательских спутников классифицируются по четырем основным категориям круговых орбит:
- маловысотные орбиты, обозначаемые h1. Эти орбиты обычно используются мини-спутниками и микро-спутниками;
- гелиосинхронные орбиты на высоте h2. Эти орбиты обычно используются спутниками наблюдения земной поверхности;
- геосинхронные орбиты со средней высотой h3, которые имеют период, близкий к 12 часам. Эти орбиты обычно используются созвездиями радионавигационных спутников (GPS, GLONASS, GNSS2 и т.д.).
- геостационарные орбиты с высотой h4. Эти орбиты обычно используются телекоммуникационными, метеорологическими и навигационными спутниками (GNSS1, GNSS2).
Высоты орбит следующие: h1=400 км, h2=800 км, h3=20000 км и h4=36000 км.
Эти четыре типа орбит представляют траектории спутников в установившемся положении. Система, соответствующая изобретению, также обеспечивает выполнение функций определения орбит и/или навигации для позиционирования этих спутников.
Задачи определения орбит/навигации/ориентации могут быть проклассифицированы следующим образом и приведены в таблице.
- Научные организации, задачами которых являются следующие:
В1: Наблюдения ионосферы.
B2: Физические и метеорологические исследования газообразной атмосферы Земли.
B3: Геодезия, геодинамика, геофизика в региональном или планетарном масштабе (перемещения полюсов, тектоника и т п.)
B4: Исследования гравитационного поля.
B5: Космическая альтиметрия, применения, связанные с исследованиями океана.
B6: Исследования, связанные с теорией относительности.
B7: Исследования высокостабильных бортовых часов.
B8: Прецизионная относительная синхронизация часов на поверхности Земли.
B9: Геодезия, геодинамика и геофизика в локальном масштабе (перекрытие области сеткой для точного мониторинга перемещений и т.п.), исследования и прогнозирование землетрясений и более обобщенно риска, связанного с некоторыми природными явлениями.
В10: Мониторинг потепления климата, в частности над полюсами с использованием метода радиобланкирования.
В частности, система, соответствующая изобретению, может внести вклад в определение международных эталонов в следующих областях, приведенных для примера:
- стандарты времени,
- геодезические опорные системы,
- гравиметрические опорные системы,
- модели ионосферы.
Система, соответствующая изобретению, является потенциально более адаптированной и более точной для большинства из приведенных областей применения, чем нынешние системы GPS, DORIS, GLONASS, PRARE.
- Системы наземной навигации:
С1: Обеспечение помощи при навигации на маршруте (самолеты, суда).
С2: Обеспечение помощи при посадке самолетов.
С3: Передача коррекций системы GNSS по направлению (для самолетов, судов, спутников).
С4: Относительная воздушная навигация (также применимая для относительной навигации с использованием систем сближения в космосе).
С5: Синхронизация для аэропортов.
С6: Синхронизация станций мониторинга и/или управления системы GNSS (система GNSS1-фаза 3, системы WAAS и GNSS2).
С7: Местоопределение с использованием космических средств мобильных объектов с низкой динамикой, таких как суда.
С8: Построение траекторий и/или локальная навигация мобильных объектов (самолетов, ракет-носителей и т.п.).
- Национальные сообщества:
D1: Планетарный мониторинг конкретных событий стратегического интереса.
D2: Синхронизация наземных и воздушных баз и кораблей.
D3: Локальная навигация транспортных средств (самолетов, судов, спутников, ракет-носителей).
D4: Местоопределение в космосе мобильных объектов с низкой динамикой, таких как суда, на поверхности Земли.
Задачи D1-D4 могут быть решены в контексте обеспечения высокой устойчивости по отношению к преднамеренным помехам. Компоненты системы, соответствующей изобретению и показанной на фиг.1, включают сегмент наземного базирования, сегмент космического базирования и пользовательский сегмент.
Сегмент наземного базирования
Наземный сегмент содержит следующие элементы:
- Основную сеть наземных радиомаяков (RBS), передающих радиосигналы пользовательским спутникам. Каждый радиомаяк передает сообщение, содержащее идентификационный код. Имеются различные типы этих радиомаяков, в частности, здесь описаны следующие три базовые категории:
- радиомаяки построения орбит (ВО), положение которых хорошо известно. Система, соответствующая изобретению, определяет орбиты пользовательских спутников с использованием этих радиомаяков. Радиомаяки построения орбит непрерывно передают сигнал. Радиомаяки построения орбит также периодически передают радиосигналы своего местоположения (и в некоторых случаях свою скорость);
- пользовательские радиомаяки (ВС), например радиомаяки определения местоположения (BL) или радиомаяки определения времени (ВТ), положение и/или время для которых первоначально неизвестно, когда они впервые вводятся в обслуживание. Система, соответствующая изобретению, может локализовать эти радиомаяки. Эти пользовательские радиомаяки также образуют часть пользовательского сегмента;
- ведущие радиомаяки (ВМ), которые передают полезную информацию или планы работы на пользовательские спутники и/или на приемную часть системы. Они являются радиомаяками построения орбит (ВО) в той степени, в какой из местоположение первоначально хорошо известно Эти радиомаяки соединены с высокостабильными часами (например, атомными часами или часами на базе водородных мазеров). Эти радиомаяки распределяют системное время в соответствии с изобретением (например, эталонное всемирное время) в форме коэффициентов времени.
- Центр выполнения задач и управления (CMC): этот центр создает рабочие планы для пользовательских спутников и передает их этим спутникам, когда они пролетают над ведущими радиомаяками. Сообщение, которое должно передаваться на конкретный спутник, содержит идентификационный код этого спутника. Центр управления генерирует сообщения конфигурации для некоторых спутников, которые с ним связаны. Он также выдает и классифицирует дистанционные измерения, выполненные для осуществления позиционирования на борту пользовательских спутников, начиная с сигналов, переданных радиомаяками. Эти дистанционные измерения также содержат некоторые параметры, зарегистрированные самими радиомаяками (например, данные с метеорологических датчиков, данные общего состояния и т.п.). Эти дистанционные измерения производятся станциями дистанционных измерений и дистанционного управления (ТМ/ТС) (не обязательно специализированными для системы, соответствующей изобретению), отслеживающей пользовательские спутники. Результаты указанных дистанционных измерений попадают в центр управления либо непосредственно, либо через центры управления, специально предназначенные для рассматриваемых спутников (центр управления спутниками (CCS)).
- Центр обработки (СТ): данный центр обработки (который может быть распределен между несколькими элементами системы) принимает результаты дистанционных измерений, отсортированные центром управления. Данный центр разделяет результаты дистанционных измерений на две группы. Одна из них содержит дистанционные измерения, необходимые для обработки, специфической для центра обработки, а другая содержит сообщения, специфические для пользователей услуг, предоставляемых системой, соответствующей изобретению.
Например, выходные данные, полученные в результате обработки, осуществленной в центре обработки, включают следующие:
прецизионное определение орбит и процедурные команды для пользовательских спутников;
прецизионное определение пространственного положения пользовательских спутников;
параметры, характеризующие ионосферу;
коэффициенты времени для радиомаяков, отнесенные к системному времени, сформированные центром обработки, параметры вращения Земли;
обновленные данные местоположения радиомаяков.
Эти полученные данные распределяются прежде всего пользователям услуг, предоставляемых системой, соответствующей изобретению, и возвращаются в центр управления, который использует их для подготовки своих рабочих планов и планов программирования, а также для обеспечения стандартных орбит для станций дистанционного измерения и дистанционного управления, использующих услуги, предоставляемые системой, соответствующей изобретению.
Сегмент комического базирования
Сегмент космического базирования включает в себя ведущие спутники и пользовательские спутники.
Ведущие спутники (SM) совместно участвуют в функционировании системы. Дистанционные измерения, осуществляемые ими, систематически адресуются центру обработки. Каждый из них оснащен специализированным приемником, условно обозначенным в данном описании ZZZ и соединенным с высокостабильным генератором (OUS). Необработанные данные измерений, выполненных этим приемником, и данные, полученные от радиомаяков, систематически форматируются в форме дистанционных измерений, принимаемых Землей с указанием центра обработки (СТ) в качестве конечного адресата. Ведущие спутники имеют возможность обрабатывать сообщения, передаваемые ведущими радиомаяками. Эти спутники имеют орбиты квази-гелиосинхронного типа, возможно вместе с маловысотными орбитами и геостационарными орбитами.
Пользовательские спутники (SC) не обязательно должны передавать свои данные дистанционных измерений в центр обработки. Поэтому их не обязательно оснащать высокостабильными генераторами. Пользовательские спутники не обязательно должны обеспечивать обработку сообщений, передаваемых ведущими радиомаяками. Эти спутники могут иметь орбиты любого типа, в частности маловысотные околоземные, гелиосинхронные, геосинхронные или геостационарные. Пользовательские спутники одновременно образуют часть сегмента космического базирования и пользовательский сегмент системы, соответствующей изобретению.
Пользовательский сегмент
Пользовательский сегмент включает стационарные или мобильные носители, такие как пользовательские спутники, самолеты или суда, оснащенные приемниками ZZZ, и пользовательские радиомаяки, такие как радиомаяки определения местоположения (или радиомаяки определения времени).
На фиг.1 представлены различные компоненты системы, соответствующей изобретению. На этом чертеже показаны самолет 10, корабль 11 и взлетно-посадочная полоса 12.
На этом чертеже также показаны локальные автономные ячейки 13 пользовательских радиомаяков и приемников, которые могут быть как стационарными, так и мобильными, и располагаются вблизи поверхности Земли. Эти ячейки автономны в той степени, что использование спутников (как ведущих, так и пользовательских) не является строго обязательным. Однако эти ячейки могут быть связаны посредством радиоканала с некоторыми из спутников системы, для обеспечения дополнительного использования системы. Например, эти локальные ячейки могут обеспечивать решение ряда задач, упомянутых выше и обозначенных В9, С1, С2, С3, С4, С8 и D3.
На фиг.2 показана схема опорного радиомаяка, соответствующего изобретению. Данный радиомаяк содержит генератор 20, генератор опорного сигнала 21, соединенный в модуле 22 генерирования и передачи сигналов с генератором несущей 24 на частоте f1 и с генератором 25 короткого кода Cc1, и в модуле 23 генерирования и передачи сигналов с генератором несущей 26 на частоте f2 и с генератором 27 короткого кода Сс2.
Датчик 28 локальных данных соединен с компьютером управления 29, который может быть соединен с модемом и/или радиоприемником 30. Компьютер управления соединен с первым блоком форматирования данных 31, расположенном в модуле 22 генерирования и передачи сигналов, и с вторым блоком форматирования данных 32, расположенным во втором модуле 23 генерирования и передачи сигналов.
В каждом модуле генерирования и передачи сигналов генератор несущей 24, 26 соединен с соответствующим модулятором 33, 34, который получает сигнал управления от интегратора 35, 36, соединенного с генератором кода и с блоком форматирования. Каждый модулятор соединен с антенной с диаграммой 37, 38 типа полусферы через соответствующий радиочастотный усилитель 39, 40. Одночастотный радиомаяк содержит только один из модулей 22 и 23.
Детальное описание системы, соответствующей изобретению
Сегмент наземного базирования
Приведенные ниже определения используются при описании радиомаяков и сигналов, передаваемых ими:
fi - i-ая передаваемая несущая частота (Гц).
Cci - короткий псевдослучайный код, модулирующий i-ую несущую частоту.
Di - информационное сообщение, модулирующее код Сci в полосе модулирующих частот.
Rci, - частота i-го псевдослучайного кода (симв./с).
Nci - число символов в псевдослучайном коде Ссi.
Тci - период повторения кода Cci (с).
Тci=Nci/Rci.
Аеi - фазовый центр передающей антенны на частоте fi.
Peci - начальная тока кода Cci.
Δτ12Ae- дифференциальная задержка между фазами кодов Cc1и Сc2 в точках Ae1 и Аe2 соответственно.
Δτ12Pe- дифференциальная задержка между фазами кодов Cc1 и Сc2 в точках Pec1 и Рес2 соответственно.
fosc - частота генератора радиомаяка.
fref - частота опорного сигнала, управляющего генераторами кода и несущей.
npi; mpi - ранги деления целых чисел, используемые i-м генератором несущей.
fi=frefxnрi/mрi
ncсi, ; mcсi - ранги деления целых чисел, используемые i-м генератором короткого псевдослучайного кода.
Rci=frefxncci/mcci
nr; mr - ранги деления, используемые генератором опорного сигнала.
fref=foscxnr/mr
Рei - мощность сигнала, переданного в момент Аеi.
Yei - выражение времени для сигнала, переданного в момент Аеi.
ϕei- фаза несущей, переданной в момент Аei.

ΔτiPAe- групповое время распространения между точками Аei, и Pcci.
Например, приведенные ниже значения могут быть приняты в качестве фундаментальных параметров радиомаяка и передаваемого опорного сигнала:
fref=10,23 МГц.
Fosc=10,23 или 10 МГц.
f1#S - диапазон (2025-2110 МГц) или X - диапазон (7145-7235 МГц).
f2# ультравысокочастотный диапазон (401-403 МГц) или L - диапазон (960-1214 МГц или 1215-1240 МГц или 1240-1260 МГц или 1427-1429 МГц или 1559-1610 МГц или 1613,8-1626,5 МГц) или S - диапазон (2025-2110 МГц).
RCel#1,023 Мсимв./с.
RCc2#1,023 или 0,511 Мсимв./с.
RD1=50 бит/с или 500 бит/с.
RD2=50 бит/с или 500 бит/с.
NCc1#1023
NCc2#1023 или 511
Коды Сc1 и Сc2 могут быть идентичными. В этом случае генераторы кодов Cc1 и Сc2, показанные на фиг.2, совпадают. Это приводит к равенству
Δτ12Pe = 0. В противном случае, отношение между длительностями Tc1 и Tc2 должно быть целым и, если возможно, то равным 1. Коды Сci называются опорными кодами.
Например, короткие псевдослучайные коды могут представлять собой С/А коды систем GPS и/или GLONASS. Скорости передачи данных могут, например, соответствовать скоростям передачи сигналов в системе GPS (и/или сигналам систем GLONASS и/или RGIC-INMARSAT 3). Эти примеры показывают, что существующие технологии могут быть использованы для электронных схем в радиомаяках и приемниках ZZZ, без каких-либо изменений или без существенных изменений- Такое повторное использование может оказаться полезным с точки зрения снижения затрат на создание радиомаяков и приемников за счет непрерывной поддержки конкурентоспособной основной системы, базирующейся на использовании стандартного формата радионавигационных сигналов.
Радиомаяки в системе, соответствующей изобретению, условно обозначены как радиомаяки ZZZ.
Базовые радиомаяки ZZZ выполнены в виде двухчастотных радиомаяков. Однако одночастотные радиомаяки также могут быть использованы в составе сегмента наземного базирования системы, соответствующей изобретению.
Осцилляторы базовых радиомаяков ZZZ представляют собой высококачественные высокостабильные кварцевые генераторы. Однако атомные часы и/или водородные мазеры и/или холодные атомные часы также могут быть подсоединены к ним.
Двухчастотный радиомаяк, соединенный с высокостабильными часами на средний или длительный срок и оснащенный устройством калибровки времени. образует радиомаяк для определения времени.
Базовые радиомаяки ZZZ соединены с микрокомпьютером (внутренним или внешним), который обеспечивает программирование некоторых параметров радиомаяков и осуществляет проверку корректности их функционирования. Микрокомпьютер соединен с датчиками локальных измерений. Эти датчики могут быть разных типов, в том числе следующие:
Датчики метеорологических параметров (например, давления, относительной влажности, температуры). Например, эти метеорологические данные могут быть использованы для определения ошибок измерений, осуществляемых приемниками ZZZ, обусловленными атмосферой, в которой распространяются сигналы, принимаемые упомянутыми приемниками, и для накопления метеорологических данных в целях их использования для мониторинга и прогнозирования погоды.
Датчики необработанных измерений типа GNSS ( псевдодальность, псевдоскорость) или датчики дифференциальной коррекции GNSS. Эти данные используются для целей относительной навигации (орбитальной или воздушной) или для целей локальной дифференциальной навигации (орбитальной, воздушной или морской).
Датчики коэффициентов времени. Коэффициенты времени α0, α1, α2 таковы, что разница ΔT между временем радиомаяка и временем системы, соответствующей изобретению, аппроксимируется следующей формулой:
ΔT(t)#α0•(t0)+α1•(t-t0)+α2•(t-t0)2,
где t - текущее время, tо - время, в которое измерены коэффициенты времени.
Эти коэффициенты времени могут быть измерены посредством приемника GPS, или GLONASS, или GNSS2, размещенного рядом с радиомаяком. Эти коэффициенты также могут быть определены независимо с помощью центра обработки для системы, соответствующей изобретению, и передаваться на радиомаяки по проводной линии связи или по радиоканалу. Эти коэффициенты могут быть переданы в сообщениях, передаваемых радиомаяками определения времени (ВТ).
Датчики общего состояния для различных компонентов радиомаяка для обеспечения дистанционной диагностики неисправностей, осуществляемой из центра управления, для системы, соответствующей изобретению.
Датчики калибровки: эти датчики периодически измеряют различные дифференциальные и/или абсолютные задержки, которые возникают при временной калибровке конкретного радиомаяка. Эти параметры представляют собой Δτ1PAe и/или Δτ2PAe и/или Δτ12Ae и/или Δτ12Pe.
Для двухчастотных радиомаяков, данные, полученные от одного из различных типов датчиков, могут передаваться с использованием двоичного сообщения D1, в то время как данные, полученные от другого типа датчиков, могут быть переданы с использованием двоичного сообщения D2. Двоичные сообщения D1 и D2 могут также быть идентичными.
Радиомаяки ZZZ могут быть выполнены как одночастотные. Поэтому они будут излучать сигнал ye1 или уе2 в зависимости от конкретного случая.
Опорные радиомаяки также характеризуются их передающими антеннами, описываемыми следующими параметрами, представленными на фиг.3:
αe- угол места спутника, как он наблюдается с радиомаяка, по отношению к местной горизонтали.
αemij- минимальный угол места, наблюдаемый по отношению к местной горизонтали для i -й частоты и спутника на высоте hj.
θe- угол визирования спутника, измеряемый относительно местной вертикали.
θemij- максимальный угол визирования для i-й частоты и спутника на высоте hj.
Gei(θe)- усиление передающей антенны для угла визирования θe и для i-й частоты.
Опорные антенны выполнены двухчастотными и не очень направленными; они имеют диаграмму направленности типа полусферы. Можно частично компенсировать ухудшение в уравновешивании связи для углов αe. Идеально она должна обладать симметрией вращения по отношению к местной вертикали. Антенна предназначена для излучения сигналов с круговой поляризацией. Ее фазовый центр является хорошо определенным.
Несущая частота (или одна из несущих частот), связанная с некоторыми локальными автономными ячейками радиомаяков и приемников, может отличаться от частот f1 и f2, описанных выше, если не требуется, чтобы упомянутые ячейки были полностью связаны радиоканалом с ведущим или пользовательским спутником. В этом случае конкретная частота локальных автономных ячеек обозначена f3.
Система, соответствующая изобретению, также содержит подгруппу радиомаяков, называемых прецизионными радиомаяками. Эти радиомаяки одновременно передают сигнал YeiP, включающий короткие коды Cci и длинные коды, обозначенные как С Li. Эти длинные коды называются прецизионными кодами. Например, эти коды могут представлять собой Р-коды систем GPS и/или GLONASS.
Для одинаковой полной излучаемой мощности создание взаимных помех сигналу этого типа намного более затруднительно, чем в случае коротких кодов, а создание помех указанным коротким кодам намного более затруднительно, чем в случае узкополосной модуляции.
Указанные радиомаяки могут иметь антенну с диаграммой типа полусферы, как и в случае опорных радиомаяков, или могут иметь диаграмму с высокой направленностью для определения орбит и сверхточной синхронизации для геостационарных спутников.
Часы, используемые на прецизионном радиомаяке, могут представлять собой атомные часы, или часы на мазере, или холодные атомные часы, если радиомаяк размещен на Земле.
Прецизионные радиомаяки могут также подсоединяться к холодным атомным часам, размещенным на орбитальном спутнике. Если такой спутник оснащен приемниками ZZZ, приспособленными для приема сигналов, передаваемых прецизионными радиомаяками, размещенными на Земле (совмещенными с приемниками ZZZ), то получается подсистема высокоточного мониторинга дрейфа холодных атомных часов.
Прецизионные радиомаяки связаны с часами с долговременной стабильностью, по меньшей мере такой точности, какова стабильность атомных часов, и таким образом представляют собой радиомаяки для определения времени.
Подсистема ZZZ, состоящая из направленных прецизионных радиомаяков и связанных с ними приемников, называется "ZZZ-время".

Коэффициент аi, представляет относительную амплитуду составляющей сигнала Yeip, содержащей длинный код, модулирующей несущую fi в квадратуре.
Если радиомаяк является в значительной степени направленным, то частоты fi могут отличаться от частот, связанных с опорными радиомаяками, чтобы предотвратить взаимные помехи от этих опорных радиомаяков.
Аналогичным образом, если спутник, принимающий сигналы от прецизионных радиомаяков на Земле, включает бортовой прецизионный радиомаяк, то частоты fi, связанные с таким маяком, не должны быть теми же самыми, что и частоты, связанные с прецизионными радиомаяками на Земле. Это позволяет избежать взаимных помех между прямым и обратным каналами связи.
RLi - частота длинного кода, модулирующего несущую fi,
NLi - число символов в длинном коде,
ТLi - длительность длинного кода,
nCLi - целочисленное отношение между частотой СLi и Сci кодов.
Например, вышеуказанные параметры могут иметь следующие значения:
RLi=10,23 или 5,11 Мсимв./с,
nCLi=RLi/Rci=10,
ТLi=одной неделе.
Сообщение Di, передаваемое прецизионными радиомаяками, содержит периодически обновляемый счетчик времени. Данные, содержащиеся в счетчике, используются для предварительной установки схемы обнаружения прецизионного кода.
Прецизионный радиомаяк может быть выполнен, как показано на фиг.4.
На этом чертеже имеется ряд элементов, уже показанных ранее на фиг.2, они представлены на фиг.4 с теми же ссылочными позициями.
Кроме того, на фиг.4 показаны следующие новые элементы: датчик калибровки времени 45, высокостабильные часы 46, два интегратора 47, 48, два модулятора 49, 50, два фазовращателя на π/4 51, 52, два генератора 53, 54 кодов СL1 и СL2, два сумматора 55, 56.
Если прецизионный код требуется, в частности, для повышения помехоустойчивости, то не является строго обязательным, чтобы прецизионный радиомаяк передавал этот код на частотах f1 и f2 в одно и то же время.
В одном из вариантов системы, соответствующей изобретению, некоторые из ведущих радиомаяков могут представлять собой прецизионные радиомаяки.
На фиг.5 представлена диаграмма, показывающая различные типы радиомаяков ZZZ (штриховкой представлена опорная система, соответствующая изобретению (базовый вариант); остальная часть фиг. 5 показывает возможности усовершенствования базового варианта).
На фиг.6 представлена подсистема прецизионного измерения дрейфа холодных атомных часов, установленных на спутнике. Дрейф указанных часов контролируется с высокой точностью, если спутник является геостационарным.
На фиг.6 показан спутник 60 и прецизионная станция 61. Спутник 60 содержит компьютер 62, связанный с прецизионным радиомаяком 63 и прецизионным приемником 64, и холодные атомные часы 65.
Каждая станция 61 содержит компьютер 70, связанный с прецизионным радиомаяком 71 и прецизионным приемником 72, а также атомные часы или часы на водородном мазере 73. Бортовая и наземная антенны в этом варианте выполнены направленными.
Система, соответствующая изобретению, также характеризуется правилами выделения псевдослучайных кодов для радиомаяков. Эти правила учитывают принцип кругов наблюдаемости. Круг наблюдаемости очерчивает часть земной поверхности, наблюдаемую со спутника, находящегося на высоте hi, как показано на фиг.7.
Круг наблюдаемости Сj, характеризуется своим центром, расположенным на поверхности Земли по вертикали под спутником, и своей площадью ,
,
где RT - радиус Земли.
Отношение площади кругов наблюдаемости, связанных с высотами hi и hj, обозначенное Rsij, определяется следующим образом: ,
,
где hj > hi.
Круги наблюдаемости также связаны с радиомаяками. Эти круги такие же, как определено выше, но центрированы на радиомаяке. Предполагается, что спутник расположен по вертикали на одной линии с радиомаяком.
На фиг. 8 показаны четыре круга наблюдаемости (C1, С2, С3, С4 ) соответственно высотам h1, h2, h3, h4.
Видно, что радиусы кругов С3 и С4 одинаковы, хотя соответствующие им высоты hj различны. Поэтому соответствующее отношение Rs34=1. Это соотношение сохраняет силу для орбит с высотой, превышающей h4.
Круги наблюдаемости, оказывающие влияние на масштаб системы, соответствующей изобретению, - это в первую очередь круги типа C1, С2 и С4.
Основополагающее правило для построения сети из радиомаяков ZZZ состоит в следующем: два радиомаяка, которым выделен идентичный код и которые должны номинально отслеживаться одним и тем же спутником, должны быть разделены расстоянием, превышающим диаметр круга наблюдаемости, связанного с упомянутым спутником. Это правило позволяет предотвратить взаимные помехи между двумя идентичными псевдослучайными кодами.
На фиг.9 и 10 представлены группы радиомаяков, излучающих сигнал с широким спектром, например в случае системы с двумя псевдослучайными кодами. Имеются следующие два типа радиомаяков в данном примере, использующих вышеописанное правило построения группы радиомаяков, описанное выше:
- радиомаяки, идентифицированные псевдослучайным кодом, обозначенные символом "о",
- радиомаяки, идентифицированные псевдослучайным кодом, обозначенные символом ≪□≫.
Правило построения сети состоит в следующем: два радиомаяка одинакового типа должны быть отделены расстоянием, равным или большим диаметра кругов наблюдаемости Cj, в пределах которых эти радиомаяки могут быть использованы. На фиг. 9 представлен пример первой подсети, иллюстрирующей данное правило. На фиг. 10 представлен пример с использованием тех же элементов и с добавлением второй подсети, соответствующей указанному правилу.
Правило для создания сети радиомаяков должно соблюдаться еще более жестко в специальном случае, когда каждый радиомаяк связан с кодом, отличным от всех других кодов (специальный случай системы, соответствующей изобретению).
Целесообразно определить следующие дополнительные параметры:
Nij - общее число максимум максиморум радиомаяков ZZZ, передающих одновременно сигналы на частоте fi в круге наблюдаемости Cj. Это число определяется требуемой эффективностью системы, соответствующей изобретению. Оно существенно зависит от баланса ошибок канала связи и измерений.
Nijo- число максимум максиморум радиомаяков определения орбит, передающих сигнал на частоте fi в круге наблюдаемости Сj.
Nijot - типовое значение максимального числа радиомаяков определения орбиты, передающих сигнал на частоте fi в круге Сj.
Nijou - типовое значение максимального числа радиомаяков определения орбиты, передающих сигнал на частоте fi, используемой в круге Cj.
Nijct - типовое значение общего максимального числа пользовательских радиомаяков, передающих одновременно на частоте fi в круге наблюдаемости Сj.
Nijc - общее число максимум миниморум пользовательских радиомаяков, передающих одновременно на частоте fi в круге наблюдаемости.
Coi.k- номер k-гo псевдослучайного кода, связанного с радиомаяком построения орбиты для частоты fi.
NMа - общее число ведущих радиомаяков.
NMj- число ведущих радиомаяков в круге Сj.
Nio - общее максимальное число радиомаяков определения орбиты, передающих на частоте fi на поверхности Земли.
Niot - типовое значение максимального числа радиомаяков, передающих на частоте fi на поверхности Земли.
τo- коэффициент ослабления плотности сети радиомаяков определения орбиты вследствие наличия участков поверхности, покрытых океанами, без островов или судов-носителей.
Пример распределений псевдослучайных кодов
В данном примере будут рассмотрены радиомаяки, передающие на частоте, меньшей частоты fi.
Предполагается, что круг С2 содержит не более восьми радиомаяков определения орбиты. Рассмотрим случай, когда N12o=8.
В соответствии с фундаментальным правилом, все псевдослучайные коды, связанные с этими восемью радиомаяками, различны. Эти коды обозначены Co1.1, Co1.2, Со1.3, Со1.4, Со1..5, Со1.6, Со1.7 и Со1.8.
Определим среднее число N1lom радиомаяков построения орбиты в круге Ci. Это число определяется следующим соотношением: ,
,
RS12=1,88 для h1=400 км, следовательно N1lom=4,25.
Это должно обеспечить достаточное перекрытие радиомаяками, так что спутники на низкой орбите смогут наблюдать по меньшей мере четыре радиомаяка.
Поэтому можно записать: N1lo≥N1lot≥4.
Данное число радиомаяков - четыре выбрано для обеспечения гибкости при выполнении задач автономного определения пространственного положения на орбитах высотой h1 и для обеспечения быстрой сходимости специфических ZZZ бортовых навигационных систем на этой высоте. ZZZ приемники, предназначенные исключительно для решения навигационных задач и задач определения пространственного положения, могут быть оснащены дешевыми осцилляторами низкой точности, например термостабилизированными кварцевыми генераторами. Дрейф часов радиомаяка типа ZZZ может рассматриваться как пренебрежимо малый по сравнению с дрейфом термостабилизированного кварцевого генератора в процедуре самоинициализации (или даже в номинальном режиме).
Отклонения этого генератора могут, таким образом, отслеживаться бортовым навигационным фильтром (ZZZ- навигатором) почти мгновенно, даже на низкой орбите.
Поэтому достаточно плотная сеть (например при Nlot≥4) открывает возможности применений системы, соответствующей изобретению, для решения задач на низких орбитах, которые были ранее исключены для систем, таких как нынешняя система DORIS (вследствие риска насыщения сети при такой плотности в присутствии радиомаяков определения местоположения) и PRARE (наземная станция PRARE слишком сложна, следствием чего являются недопустимо высокие затраты на создание сети такой плотности).
В настоящее время решение таких задач возможно только с использованием систем GPS и GLONASS.
Кроме того, достаточно плотная сеть одновременно доступных радиомаяков могла бы обеспечить прецизионное определение орбит для спутников, находящихся на низкой орбите, в целях выполнения исследований в гравитационном поле на соответствующих высотах, не требуя дополнительного использования специализированных радиомаяков на этих спутниках. Такие радиомаяки предполагаются отслеживаемыми спутниками на более высоких орбитах, не требуя модифицирования опорных приемников для отслеживания упомянутых радиомаяков на орбите.
Кроме того, предполагается, что необходимо иметь возможность одновременно отслеживать семь радиомаяков определения орбиты на круг С3 или С4. Такие семь радиомаяков не являются строго необходимыми для достижения требуемой точности навигации, но они обеспечивают некоторую степень избыточности и обеспечивают процедуру RAIM (автономный текущий контроль целостности приемника). Поэтому используем значение N4ou=7. Базовая система ZZZ с выгодой использует один и тот же тип наземных радиомаяков (диаграмма антенны, передаваемая мощность и т.д.) для всех типов орбит, включая геостационарные орбиты и орбиты перехода на геостационарную орбиту. Различие между радиомаяками проводится только при использовании их псевдослучайных кодов и идентификационного номера.
Коды от Co1.1 до Co1.8, определенные выше, не являются очевидным образом используемыми, поскольку каждый из них размещен в одном и том же круге С4 в одно и то же время. Получено значение RS24#7,5 для h2=800 км и h4=36000 км.
Поэтому псевдослучайные коды семи радиомаяков, наблюдаемых из кругов С3 и С4, должны быть отличными от кодов от Co1.1 до Co1.8. Эти новые коды называются Co1.9, Co1.10, Co111, Co1.12, Cо1.13, Co1.14 и Co1.15. Поэтому получим
N14ot=N12ot•RS24+N14ou,
N14ot=7.5•8+7,
N14ot=67.
Коды от Co1.9 до Co1.15 могут, таким образом, наблюдаться всеми спутниками, расположенными на высотах менее h3 или h4, и тем более это имеет место для спутников на гелиосинхронной орбите h2 или на низкой орбите h1.
Среднее число кодов от Co1..9 до Co1.15, наблюдаемых в круге С2, таково, что .
.
Для того чтобы ограничить значение N12o и поэтому гарантировать минимальное значение для N12c, максимальное число радиомаяков построения орбит, для которых код находится между Co1 и Co1.15, в круге С2, ограничено m=2:
N12o=N12ot+m,
N12o=8+2=10.
Сеть радиомаяков построения орбит должна включать по меньшей мере N4M=2 ведущих радиомаяков на круг наблюдаемости С4 (один опорный ведущий радиомаяк и один ведущий радиомаяк горячего резерва). Каждый должен передавать специфическую информацию на спутники (ведущие и пользовательские) на геостационарной орбите, между проходами орбитальных спутников. Поэтому псевдослучайные коды, связанные с ведущими радиомаяками, должны быть между Co1.9 и Co1.15. Поэтому число N14ou (=7) содержит ведущие радиомаяки.
Коды от Co1.1 до Co1.15 ортогональны друг другу.
На фиг. 11 показан пример выделения кодов ZZZ радиомаяков построения орбит.
Полное число ведущих радиомаяков NM поэтому равно по меньшей мере ,
,
где SТ- поверхность Земли, ST = 4πR
ZZZ ведущие радиомаяки могут устанавливаться постепенно. Два или три ведущих радиомаяка могут быть достаточны для перекрытия потребностей спутников, выведенных на орбиты с высотой h2 типа, и геостационарных спутников, связанных с областями наблюдаемости, в которых расположены два или три радиомаяка. Необходимость в увеличении числа ведущих радиомаяков по отношению к первоначальной их конфигурации вызвана частично обеспечением полного перекрытия геостационарной орбиты и частично малым числом контактов спутников на маловысотных орбитах (высоты h1 типа) с конкретным ведущим радиомаяком. Эти радиомаяки связаны с системным временем согласно изобретению, которое само связано с всемирным опорным временем. Они могут использоваться для привязки бортовых часов к известному эталону времени (синхронизация "борт-Земля"). Увеличение числа ведущих радиомаяков (и/или радиомаяков определения времени, связанных с временным эталоном) свыше упомянутой исходной конфигурации может также обеспечить сокращение времени самоинициализации бортовых систем орбитальной навигации в приемниках ZZZ на борту орбитальных спутников.
Ниже будет использоваться следующая запись:
mijo- число одночастотных радиомаяков построения орбит, передающих на частоте fi в Сj круге.
bjo - число двухчастотных радиомаяков в Сj круге.
Поэтому получим:
nijo=bjo+mijo.
В вышеприведенном примере предполагалось, что круг C2 не содержит более восьми радиомаяков построения орбит, передающих на частоте f1, a именно:
N12o=b2o-m12о≤8.
Аналогично предполагалось, что число радиомаяков построения орбит, передающих на частоте f1, содержащихся в круге C1, равно по меньшей мере 4, если это возможно в соответствии с географией местности (например, удаленной от участков земной поверхности, покрытых океаном, не имеющих островов), т.е.:
N1lo=b1o+m1lo≥4.
Следовательно, могут быть удовлетворены потребности, перечисленные выше как задачи типа А11, А21, А31 и А41.
Аналогичным образом, в данном примере предполагается, что круг С2должен содержать не менее четырех двухчастотных радиомаяков построения орбит, чтобы удовлетворить потребности, указанные выше, как задачи типа А12, А22, А32 и А42, а также задачи научных исследований, условно обозначенные как Bk. Поэтому получим, что b20≥4.
Из вышеприведенных неравенств получим, что условие, относящееся к числу одночастотных радиомаяков, передающих на частоте f1 в круге С2, равно:
0≤m12o≤4.
Это двойное неравенство представляет различные варианты выбора для состава частот в сети радиомаяков ZZZ:
- либо все радиомаяки являются двухчастотными (m12o=0);
- либо одночастотные радиомаяки "компенсируют" возможную нехватку радиомаяков для спутников, выведенных на низкую орбиту (высоты типа h1), в предположении, что главным образом используются одночастотные приемники ZZZ для решения задач навигации и определения пространственного положения.
В примере, описанном выше, можно оценить максимальное число радиомаяков для построения орбит, передающих на частоте f1:
N1o#N14ot•ST/S4#157,
Nlot # τO• N1p # 110, где τo # 0,7.
Предполагается, что ухудшение коэффициента τo ограничено следующими факторами: 1) установкой ряда радиомаяков построения орбит вблизи полюсов Земли для удовлетворения потребностей задачи В 10, 2) установкой радиомаяков на множестве островов с благоприятным географическим распределением, либо использованием плавучих барж или кораблей.
Сеть радиомаяков построения орбит может устанавливаться постепенно пока не будет достигнуто их конечное число, для обеспечения уровня избыточности, требуемого для интегрированного оперативного использования. После этого можно будет говорить о полной эксплуатационной производительности системы.
Пользовательские радиомаяки
Число Nijc и число Nijct пользовательских радиомаяков, одновременно передающих сигналы в пределах круга С,, таковы, что
Nijct=Nij-Nijot,
Nilc=Nij-Nijo.
Однако число пользовательских радиомаяков, расположенных в пределах круга Cj, может быть намного больше. Некоторые радиомаяки могут осуществлять передачи только в некоторые из дней недели. Поэтому определены "кодовые слова недели" (WW) согласно следующему формату:
где каждое значение bk представляет собой булево значение, связанное с одним из дней недели. Если одно из этих значений установлено в состояние "I", то это означает, что радиомаяк будет передавать свой сигнал в течение дня недели, связанного с этим значением. Если другое булево значение установлено в состояние "0", то это означает, что радиомаяк будет переведен в дежурный режим для соответствующего дня недели.
Пользовательские радиомаяки, расположенные близко друг к другу, образующие сеть на земной поверхности (для удовлетворения потребностей геодезии, геодинамики и геофизики в местном масштабе) будут совместно использовать одно и то же еженедельное кодовое слово(ww). Это означает, что набор радиомаяков, образующих сетку на контролируемом участке, могут передавать сигналы одновременно. Хотя эти радиомаяки очень близки друг к другу, они не создают друг другу взаимных помех, ввиду использования множественного доступа с распределением кодов. Точность определения местоположения относительно двухчастотных радиомаяков ZZZ, образующих сетку на местности, чрезвычайно высока, так как передачи осуществляются одновременно. Это приводит к накоплению большого количества необработанных измерений, сделанных на борту спутников-наблюдателей Также становится возможным использовать интерферометрические способы с использованием фаз принимаемых несущих, аналогично методам, используемым в геодезии и высокоточных геофизических исследованиях с применением системы GPS.
Деформации местности могут контролироваться весьма точно с использованием спутников наблюдения Земли, имеющих на борту приемник ZZZ и РЛС с синтезированной апертурой, благодаря чему могут применяться методы радиолокационной интерферометрии. Система, соответствующая изобретению, обеспечивает определение орбит спутников, имеющих на борту РЛС, и определение относительного и абсолютного местоположения радиомаяков, образующих сетку на наблюдаемой территории. Она обеспечивает высокоточный контроль изменения указанных местоположений во времени.
Определение местоположений, осуществляемое в заявленной системе, может обеспечиваться с более высокой точностью, чем с использованием современных систем GPS, GLONASS, DORIS, PRARE.
Интерферометрические изображения, полученные с помощью РЛС с синтезированной апертурой, обеспечивают получение кривых деформации местности.
Взаимосвязь между системой ZZZ и РЛС с синтезированной апертурой может быть с выгодой использована для контроля и прогнозирования природных явлений (землетрясений, извержений вулканов и т.п.). Это обеспечивает удовлетворение требований, указанных выше для задачи В9.
На фиг. 12 представлено интерферометрическое изображение, полученное с помощью РЛС с синтезированной апертурой, иллюстрирующее кривые деформации местности 80 и детальные изменения положения пользовательского радиомаяка, входящего в упомянутую сетку на местности.
Пользовательские радиомаяки, образующие сетку на местности в потенциально опасных районах, могут использоваться совместно с расположенными рядом с ними датчиками сейсмического типа.
Некоторые пользовательские радиомаяки, расположенные на позиции в течение продолжительного периода времени, должны быть полностью автономными, включая их источники питания. Энергия может быть получена от аккумуляторов, подзаряжаемых с помощью солнечных батарей, например, как показано на фиг.13. В этом случае может оказаться необходимым определенным образом распределять значения булевых чисел, соответствующих дням недели, чтобы программировать циклы заряда и разряда батарей энергопитания для конкретных радиомаяков.
На фиг. 14 показан пример процентного соотношения для заряда в функции времени.
Кодовые слова недели для автономных пользовательских радиомаяков должны передаваться в центр управления системы, соответствующей изобретению.
Центр управления регулирует использование всех кодовых слов недели с учетом следующего правила:
Если Nijgc глобальное значение числа пользовательских радиомаяков, которые могут передавать на частоте f1 в круге Сj, то все булевы значения bki, кодовых слов недели для пользовательского i- го радиомаяка должны выбираться так, чтобы удовлетворялось соотношение
для всех значений от 1 до 7.
Заметим, что хотя NjGc≤Nijc, однако нет необходимости управлять недельными кодовыми словами. Все радиомаяки, соединенные с сетевым источником питания (т. е. для которых не существует проблем заряда и разряда аккумуляторов), могут иметь недельные кодовые слова такие, что удовлетворяется соотношение:
Псевдослучайные коды, выделенные пользовательским радиомаякам, должны выбираться согласованно с недельными кодовыми словами. Коды, выделенные этим радиомаякам, обозначены Cci.1, Ссi.2, Ссi.3,..., Ссi.n. Эти коды ортогональны всем кодам, выделенным радиомаякам построения орбит. Их селекция практически идентична селекции для радиомаяков построения орбит.
Число назначения кода для каждого радиомаяка ZZZ, содержащееся в передаваемом информационном сообщении, не то же самое, что число назначения кода для всех других радиомаяков.
Преимущество одночастотных радиомаяков определяется как функция следующих параметров экономического характера:
ΔCMB = затраты на разработку для одночастотного радиомаяка, если двухчастотные радиомаяки уже разработаны.
СMn - повторяющиеся затраты на одночастотный радиомаяк, требуемые для производства n радиомаяков.
NM- число радиомаяков, которые не требуют строго двухчастотного режима.
СBm - повторяющиеся затраты на двухчастотный радиомаяк, требуемые для производства m радиомаяков.
NB - число радиомаяков, которые должны быть двухчастотными.
Такие одночастотные радиомаяки могут быть использованы с выгодой, если удовлетворяется следующее соотношение:
Поэтому можно сделать выбор между различными возможными вариантами для формирования совокупности частот наземной сети радиомаяков, если число радиомаяков и связанные с ними затраты известны.
Сегмент космического базирования
На фиг.15 показана схема для ведущего спутника (SM).
Ведущие спутники оснащены двухчастотным приемником ZZZ 85 и двумя соответствующими приемными антеннами 86, 87. Приемник подсоединен к спутниковой шине данных 88. Эта шина соединена с бортовым компьютером 89, предназначенного для управления всей бортовой системой. Блок форматирования данных 91 также подсоединен к шине 89.
Шина также соединена с блоком форматирования данных, сопряженным с приемопередатчиком 90 дистанционных измерений и дистанционного управления. Необработанные измерения и данные, полученные приемником ZZZ, направляются к антенне дистанционных измерений и дистанционного управления, которая передает их на Землю. Планы функционирования ведущего приемника принимаются в форме данных дистанционного управления, направляемых приемнику через шину данных спутника.
Если система, соответствующая изобретению, используется для стандартного построения орбиты спутника-носителя, то приемопередатчик, предназначенный для дистанционного управления и дистанционных измерений, уже не обязательно должен быть когерентным приемопередатчиком, предназначенным для осуществления измерений двустороннего распространения (и/или доплеровских измерений) в наземной станции, производящей отслеживание спутника.
Поэтому спутниковые приемопередатчики и наземные станции в этом случае существенным образом упрощаются.
Одна из частот системы, соответствующей изобретению, может находиться в S- диапазоне, выделенном для дистанционного управления и дистанционных измерений (2025-2110 МГц). Эта частота f1 может предпочтительным образом выбираться для обеспечения совместимости спутника-носителя с антенной приемопередатчика дистанционных измерений и дистанционного управления в S- диапазоне. Число антенн для указанного спутника может быть уменьшено, если полоса пропускания используемой антенны S- диапазона совместима с полосами обслуживания типа дистанционного измерения и дистанционного управления и с полосой на частоте f1 системы, соответствующей изобретению. В этом случае схема, используемая для ведущего спутника, может быть одной из показанных на фиг.16 и 17, при этом элементы, идентичные приведенным на фиг.14, обозначены теми же самыми ссылочными позициями.
Пользовательский спутник
Схема по существу та же самая, что и для ведущего спутника, за исключением следующего:
1) приемник может быть опорным или прецизионным одночастотным или двухчастотным приемником;
2) необработанные измерения и данные, полученные радиомаяком, передаются не систематически на Землю, а в зависимости от задачи, выполняемой пользовательским спутником.
На фиг. 18 показана схема для базового приемника ZZZ. На этом чертеже показаны две антенны 100, 101, каждая из которых соединена с радиочастотной микросхемой или с гибридными элементами 102, 103 и аналого-цифровым преобразователем 104, 105, цифровые переключатели 106, 107, специализированные микросхемы 98, 99 (см. фиг.18), микропроцессор 108, соединенный с блоком памяти 109 и интерфейсом 110. Микропроцессор 108 включает в себя один или два микропроцессора или один микропроцессор, связанный с сопроцессором.
Данный приемник также содержит генератор 111 и источник питания 112. Специализированная интегральная схема может быть выполнена как мультистандартная; каналы выполнены программируемыми (если Cc1 не равно Сc2) и обеспечивают обработку кодов Cc1 и Сc2. Данная схема исключает случаи приемников сигналов от спутников систем GPS, GLONASS или GNSS1.
На фиг.19 показан дешевый приемник ZZZ, предназначенный для задач навигации и определения пространственного положения. На этом чертеже представлены антенны 114, усилители 115, соединенные с первым программируемым переключателем 116, радиочастотная микросхема 117 (f1 или f2, соединенная с двумя n-канальными специализированными ИС 118, 119 для одиночного кода, микропроцессор 120 блок памяти 121, интерфейс 122, источник питания 123 и термостабилизированный кварцевый генератор 124. Данная схема исключает случаи использования приемников сигналов от спутников систем GPS или GLONASS.
На фиг.20 показан одночастотный приемник ZZZ для решения задач навигации и определения пространственного положения. На этом чертеже показаны антенны 130, радиочастотная микросхема 131 на частоту f1, переключатель дискретизации 132, две n-канальные специализированные ИС 133, 134 для одного кода, микропроцессор 135, блок памяти 136, интерфейс 137, источник питания 138 и термостабилизированный кварцевый генератор 139.
На фиг. 21 показан двухчастотный приемник ZZZ для навигации, построения орбит и прецизионного определения пространственного положения. На этом чертеже показаны антенны 140, микросхемы 141, переключатель дискретизации 142, специализированные ИС 143, 144, микропроцессор 145, блок памяти 146, интерфейс 147, генератор 148 и источник питания 149.
Каждая компания, производящая приемники ZZZ, может выпускать только двухчастотные приемники, или одночастотные и двухчастотные совместно, в зависимости от оптимизации затрат на разработку и конъюнктуры рынка.
На фиг.22 показан базовый приемник смешанного типа GNSS-ZZZ. На чертеже показаны антенны 150, микросхемы 151, работающие на частоте fi, переключатели 152, специализированные ИС 153, 154, микропроцессор 155, память 156, интерфейс 157 и генератор 158.
Здесь fi-это ZZZ-частота f1, f2 или f3.
fk - это частота системы GPS, или системы GLONASS, или системы GNSS2.
Коды Cck представляют собой С/А коды систем GPS или GLONASS или коды системы GNSS.
Такой приемник может удовлетворять указанные выше потребности, условно обозначенные А11. А12, А13, А14, А31, А32, А33, А34, С1, С2, С3, С4, С7, С8, D3, D4.
Приемники смешанного типа GNSS-ZZZ
Приемники смешанного типа могут быть следующих видов:
GLONASS-ZZZ,
GPS-ZZZ,
GNSS2-ZZZ. т.e.GNSS3.
Эти приемники удовлетворяют максимальное количество потребностей автономных систем для орбитальных применений.
Характеристики навигации и построения орбиты могут быть обеспечены, если даже используется только одна из двух систем (созвездие спутников на орбите или сеть радиомаяков на Земле).
Например, смешанные приемники могут использоваться спутниками, для которых выполняемая задача должна иметь место на интервале времени, когда используемое спутниковое созвездие может переходить от С\ А- кода в режим "оплачиваемого" обслуживания или в связи с требуемыми данными.
Кроме того, одновременная наблюдаемость этих спутников и радиомаяков позволит обеспечить очень короткое время сходимости для бортовых навигационных систем, для установки или сохранения положения и для улучшения соответствующей точности в процессе функционирования используемых систем.
Приемники смешанного типа могут использоваться на стратегически важных спутниках. Для спутников смешанного типа могут иметь место следующие варианты построения систем в зависимости от конфигурации переключения:
а) 2n каналов, выделенных системе, соответствующей изобретению,
б) n каналов, выделенных используемому созвездию спутников, и n каналов, выделенных системе, соответствующей изобретению,
в) 2n каналов, выделенных созвездию спутников.
Конфигурация (б) предпочтительна для задач С1, С2, С3, С4, D3.
Двухчастотные приемники смешанного типа (двухчастотные приемники системы GNS S3) являются оптимальными для научных применений В1-В10.
Фиг.23 и 24 иллюстрируют дешевые одночастотные (навигационные) приемники ZZZ и прецизионные приемники ZZZ соответственно.
На фиг. 23 показаны антенна 160, радиочастотная микросхема 161 частоты fi, АЦП 162, специализированная ИС для кода Сci, микропроцессор 164, память 165 и интерфейс 166.
На фиг.24 показаны антенны 170, радиочастотные микросхемы 171, 172 частот f1 и f2, АЦП 173, 174, две опорные прецизионные специализированные ИС 175, 176, микропроцессор 177, память 178, интерфейс 179, высокоточные часы 180. Каждая прецизионная специализированная ИС, связанная с частотой fi, может обрабатывать короткий код Cci и длинный код СLi. Два модуля калибровки 181, 182 подсоединены между каждой специализированной ИС и микросхемой, соответствующей ей, соответственно. Опорный прецизионный приемник ZZZ предназначен для обработки сигналов, передаваемых прецизионными радиомаяками с диаграммой направленности антенны типа полусферы. Приемники ZZZ, предназначенные для контроля атомных часов на орбите, снабжены прецизионными специализированными ИС, модифицированными относительно прецизионных опорных специализированных ИС, для снижения инструментальных шумов измерений, обусловленных причинами иными, чем тепловые.
Приемные антенны
Спутники также характеризуются своими приемными антеннами, описываемыми следующими параметрами:
αr- угол места радиомаяка, наблюдаемого со спутника, по отношению к местной горизонтали.
αrmij- минимальный угол места, определяемый относительно местной горизонтали, для i -й частоты (i∈{1; 2}) и высоты спутника hj.
θr- угол визирования радиомаяка по отношению к местной вертикали.
θrmij- максимальный угол визирования для i -й частоты и высоты спутника hj.
Gri(θr)- усиление приемной антенны для угла визирования θr и i-й частоты.
Опорные приемные антенны выполнены двухчастотными и имеют диаграмму направленности типа полусферы для спутников с орбитами типов h1 и h2 и, следовательно, не являются высоконаправленными. В идеальном случае они должны иметь симметрию вращения относительно местной вертикали.
Антенна предназначена для приема сигналов круговой поляризации, излучаемых радиомаяками типа ZZZ.
Диаграмма, представленная на фиг.25, соответствует случаю спутника на маловысотной орбите.
Соотношения между углами α и θ, характеризующие линию визирования радиомаяк-спутник, имеют следующий вид:
Для спутника на низкой орбите (h1 или h2): θe # θr или π/2 # αe+θr.
Система определяется с учетом следующего соотношения
θrmij # θemij а именно: π/2 # αemij+θrmij.
Для общего случая спутника на любой высоте (например, h1, или h2, или h3, или h4) получим: ,
, .
.
В случае геостационарных спутников (или спутников GNSS2), которые уже установлены в заданное положение, приемная антенна является направленной, так что ее площадь перекрытия на местности аналогична площади, перекрываемой кругом С4 (или С3).
Кроме того, Ari - фазовый центр приемной антенны на частоте fi.
Характеристики системы ZZZ
Фиг. 26 иллюстрирует космические каналы связи между радиомаяком ZZZ и приемником ZZZ.
Определены следующие параметры:
C/No - отношение мощности сигнала (С) к спектральной плотности шума (No).
 отношение C/No, скорректированное в антенне с учетом теплового шума, для частоты fi и высоты hj.
отношение C/No, скорректированное в антенне с учетом теплового шума, для частоты fi и высоты hj.
 эквиваленное отношение C/No, с учетом других радиомаяков, передающих одновременно в круге Сj, на частоте fu.
эквиваленное отношение C/No, с учетом других радиомаяков, передающих одновременно в круге Сj, на частоте fu.
 эквивалентное отношение C/No, с учетом узкополосных источников помех, присутствующих в круге Cj, для частоты fi.
эквивалентное отношение C/No, с учетом узкополосных источников помех, присутствующих в круге Cj, для частоты fi.
 эквивалентное отношение C/No, с учетом белого шума нетеплового происхождения, присутствующего в круге Cj, для частоты fi.
эквивалентное отношение C/No, с учетом белого шума нетеплового происхождения, присутствующего в круге Cj, для частоты fi.
 эквивалентное глобальное отношение C/No в среде без взаимных помех.
эквивалентное глобальное отношение C/No в среде без взаимных помех.
 эквивалентное глобальное отношение C/No в среде с помехами.
эквивалентное глобальное отношение C/No в среде с помехами.
С учетом введенных соотношений получим: ,
, .
.
Определены также следующие параметры:
С - скорость света=3•108 м/с,
Dij - дальность между фазовыми центрами Аei, и Ari, связанными со спутниками на высоте hj.
Для последующих вычислений используется следующая аппроксимация:
D1j#D2j#Dj,
Leij - ослабление в свободном пространстве для частоты fi (Le < 1) и высоты hj,
Lai(θr)- ослабление иное, чем в свободном пространстве, для частоты fi(La > 1) и угла визирования θr ,
,
k - постоянная Больцмана=1,379•10-23 Дж/К,
Тij - шумовая температура системы, скорректированная в антенне, для частоты fi и высоты hj,
NОthij - спектральная плотность теплового шума, скорректированная в антенне, для частоты fi и высоты hj,
Сij - мощность полезного принимаемого сигнала в антенне для частоты fi и высоты hj ,
,
NОthij=К•Тij, .
.
В лучшем случае получим: ,
, .
.
В худшем случае получим: ,
, .
.
Кроме того, получим: ,
, .
.
Данный расчет дает пессимистическую оценку, поскольку он предполагает, что сигналы используемого радиомаяка принимаются в условиях худшего случая и что (Nij - 1) других радиомаяков, осуществляющих передачи одновременно в круге Cj, принимаются как в наилучшем случае.
 .
.
Данный расчет дает оптимистическую оценку, поскольку предполагает, что сигналы используемого радиомаяка принимаются в наилучшем случае и что (Nuj-1) других радиомаяков, осуществляющих передачи одновременно в круге Cj, принимаются как в наихудшем случае; и ,
, .
.
Параметры системы, соответствующей изобретению, выбираются так, что ,
,
где Mi - запас по взаимной корреляции, относящийся к кодам Сci. Это позволяет избежать взаимных помех между ортогональными кодами Сci. Дополнительный запас может быть принят во внимание, когда доплеровские частоты, связанные с различными кодами, достаточно удалены одна от другой.
Параметры среды с учетом взаимных помех могут быть представлены следующим образом:
Noxij - плотность белого шума (или эквивалентного шума), вызванного отдельными источниками, воспринимаемыми приемной антенной, для i -й частоты и высоты hj.
РbМij - средняя мощность мощных узкополосных источников помех для i-й частоты и высоты hj, воспринимаемая антенной.
Рbmij - средняя мощность узкополосных источников помех для i-й частоты и высоты hj.
ΔFMij- разность средних частот для мощных узкополосных источников помех для i-й частоты и высоты hj.
ΔFmij- разность средних частот для слабых узкополосных источников помех для i-й частоты и высоты hj.
Отношения  вычисляются с использованием параметров, приведенных выше:
вычисляются с использованием параметров, приведенных выше: ,
, ,
, ,
,
 ,
,
где Е обозначает целую часть выражения в скобках, a sinc обозначает синусоидальную функцию.
Параметры системы, соответствующей изобретению, выбраны таким образом, что .
.
Частоты f1 и f2 системы, соответствующей изобретению, выбираются из условия максимизации значений
 .
.
в той степени, в какой это допустимо законом распределения частот в диапазоне.
Представленные ниже параметры введены для характеристики специализированных ИС в опорных приемниках ZZZ:
Bbmij - полоса шумов для одностороннего измерения дальности для частоты fi и высоты hj.
Bnpij - полоса шумов для односторонних доплеровских измерений для частоты fi и высоты hj.
Т - время отсчета доплеровского измерения.
Li - внутренние потери в приемнике между антенным входом Аij и точкой ввода в контур сопровождения сигнала, для частоты fi.
 стандартное отклонение шумов измерения псевдодальности (m) на частоте fi в условиях отсутствия помех, для высоты h.
стандартное отклонение шумов измерения псевдодальности (m) на частоте fi в условиях отсутствия помех, для высоты h.
 стандартное отклонение шумов измерения псевдоскорости (m/s) на частоте fi в условиях отсутствия помех, для высоты hj.
стандартное отклонение шумов измерения псевдоскорости (m/s) на частоте fi в условиях отсутствия помех, для высоты hj.
 соответствующие стандартные отклонения в среде с помехами.
соответствующие стандартные отклонения в среде с помехами.
С использованием введенных параметров получим:
Стандартные отклонения  вычисляются с использованием формул, идентичных приведенным выше, при следующей замене
вычисляются с использованием формул, идентичных приведенным выше, при следующей замене .
.
Шумовые измерения, связанные с генераторами, характеризуются следующим образом:
σPDosc- стандартное отклонение 1 сигма шумов измерения псевдодальности, обусловленных генераторами.
σPVosc- стандартное отклонение 1 сигма шумов измерения псевдоскорости, обусловленных генераторами.
Измерения шумов, обусловленных генераторами, вычисляются с использованием следующих параметров:
ΔF- разность частот (Гц),
F - центральная частота генератора (Гц).
Кратковременная стабильность генератора обозначается Si (i=b для бортового генератора, i=S для наземного генератора).
Стабильность определяется на интервале Т доплеровского отсчета: .
.
Тогда ,
, .
.
Шумы глобальных кратковременных измерений псевдодальности (или псевдоскорости) обозначенные как σPD или σPV выражаются следующим образом:
В среде без помех: ,
, .
.
В среде с помехами: ,
, .
.
Стратегии инициализации системы, соответствующей изобретению
В случае опорного приемника, показанного на фиг.27А или 27В, этот приемник переходит в одночастотный режим при процедуре инициализации. Переключение может конфигурироваться для этих целей следующим образом.
Специализированные ИС предполагаются мультистандартными (пригодными для кодов Cc1 и Сc2). Каждый канал осуществляет поиск кода Coi..k, наблюдаемого из круга Cj.
Например, в случае орбиты на высоте h1 или h2 наблюдаемые коды могут быть обозначен как Сoi.1, Сoi.2,..., Coi.8, Соi.9,..., Соi.15 (см. правило распределения кодов для радиомаяков построения орбит).
Приемник ZZZ параллельно выполняет определение энергии для всех коротких псевдослучайных кодов, связанных с радиомаяками построения орбит.
В случае упомянутого примера это число кодов равно 15. Если специализированные ИС имеют n каналов, то они должны теоретически подчиняться следующему правилу:
2•n≥15, следовательно, n≥8.
Кроме того, если n≥15, то переключатели уже не строго необходимы для перевода специализированных ИС в режим работы параллельного определения энергии.
Примем следующие обозначения:
BDij - доплеровская полоса на частоте fj, связанная с высотой hj.
Vjmax - максимальная радиальная скорость между спутником и радиомаяком для высоты hj.
ΔFijna- ширина доплеровской полосы, связанной с частотой fi и высотой hj, в автономном режиме обнаружения.
Tj - средняя продолжительность наблюдаемости радиомаяка в круге Cj.
Trmaxija - максимальная продолжительность автономного поиска энергии для частоты fi и высоты hj.
NcDijna - число доплеровских полос для автономного поиска энергии для частоты fi и высоты hj.
τijna- полная продолжительность сканирования для короткого псевдослучайного кода Сci для высоты hj.
С использованием введенных параметров получим:
Доплеровские измерения исследованы для направления, противоположного направлению среднего изменения наблюдаемых доплеровских частот, как показано на фиг.28.
В одном из вариантов изобретения исследованы только доплеровские измерения, соответствующие положительным изменениям доплеровской частоты. Эта стратегия может быть принята для трехосевых спутников с инерциальными наведением.
Принято, что доплеровская частота положительна, если рассматриваемые спутник и радиомаяк приближаются друг к другу.
Исходные измерения (без обработки) производятся периодически.
Доплеровские измерения выполняются в последовательном режиме, при условии, что периоды доплеровских отсчетов являются строго смежными.
Навигационная система приемника ZZZ использует доплеровские измерения и их относительную датировку для определения исходной орбиты тем же самым образом, как осуществляется самоинициализация в навигационных системах нынешних систем DORIS.
Используемая абсолютная датировка осуществляется с помощью сигналов от ведущих радиомаяков, которые передают коэффициенты времени относительно времени системы ZZZ и всемирного времени и, возможно, от некоторых радиомаяков, как для построения орбит, так и для определения времени, также передающих упомянутые коэффициенты времени.
Улучшение бортовой точности определения орбиты достигается постепенно, пока не будет получено устойчивое значение. Такая точность характеризуется стандартным отклонением 1 σ оценки дальности (радиальной) между спутником и радиомаяком, обозначенной σD
Навигационная система затем может определить разность по времени между часами приемника и часами радиомаяка с использованием измерений псевдодальности, связанных с упомянутым радиомаяком. Рассматриваются радиомаяки Bj, причем считается, что спутник оснащен двухчастотным приемником ZZZ, как показано на фиг.29.
Измерения псевдодальности PDij, связанные с радиомаяками, для которых j= а и b, на частоте fi таковы, что:
PDij = Dj+C•ΔTjsat+C•(τionoj-sat)i,,
где ΔTjsat- разность во времени между часами спутника и часами на j-м радиомаяке;
(τionoj-sat)i- ионосферная задержка, связанная со спутником и j-м радиомаяком, для частоты fi.
Dj - дальность между j-м радиомаяком и спутником, обычно хорошо известная после того, как в навигационной системе достигнуто состояние сходимости.
Поэтому требуемая разность во времени ΔTjsat определяется следующим образом: .
.
Неизвестной осталась ионосферная задержка (τionoj-sat)i Она определяется в следующем виде: ,
,
где Ej - угол места траектории спутника для j-го радиомаяка при максимальной электронной концентрации ионосферы (в радианах), которая хорошо известна заранее;
СЕТ - полное содержание электронов в ионосфере по вертикали (электрон/м2), хорошо известное заранее.
Параметр СЕТ может непосредственно измеряться, так как используемая система является двухчастотной и обеспечивает возможность измерений псевдодальности. Получим: .
.
Ионосферную задержку можно поэтому измерить: .
.
Стандартное отклонение σ (τionoj-sat)i для измерения ионосферной задержки поэтому определяется следующим образом: ,
,
где σPDij- стандартное отклонение измерения псевдодальности, вычисленное для среды с помехами или без помех, в зависимости от конкретного случая.
Стандартное отклонение синхронизации "борт-Земля" σΔTjsat определяется следующим образом: .
.
Неопределенность вычисленной таким образом разности времени ΔTjsat игнорирует ошибку калибровки бортового и наземного оборудования, обозначенную Ecal.
Полная ошибка в мгновенной оценке ΔTjsat обозначена EΔTjsat. Значение этой ошибки может возрасти при следующей записи:
EΔTjsat ≤ σΔTjsat+Ecal.
На практике навигационная система ZZZ может отфильтровывать эту ошибку в процессе прохода над конкретными радиомаяками, для того, чтобы уменьшить ее. Эта отфильтрованная ошибка обозначается EΔTjsat
Номинальные стратегии функционирования системы, соответствующей изобретению
Если число навигационных систем ZZZ опорных приемников, инициализированных с использованием измерений, осуществляемых в одночастотном режиме, становится тем же самым, что и число ограниченных каналов, то упомянутые приемники переходят в двухчастотный режим.
Соответствующая конфигурация показана на фиг.27С.
Ведущие спутники и некоторые пользовательские спутники сбрасывают необработанные измерения и данные, принятые на борту, в центр управления, и центр управления подготавливает планы работы для упомянутых спутников. Эти планы работы составлены главным образом из номеров пользовательских радиомаяков, которые должны отслеживаться, и из связанных периодов наблюдения.
Центр управления может также передавать план инициализации на некоторые спутники через ведущие радиомаяки, если это необходимо. Например, эти планы могут включать орбитальные параметры для упомянутых спутников и/или разности во времени между временем радиомаяков и временем данных спутников. Как только радиомаяк захвачен на сопровождение, он отслеживается орбитальным спутником, пока он установлен.
Инициализированные навигационные системы ZZZ осуществляют доплеровское предпозиционирование (или предпозиционирование по дальности) для снижения времени замыкания фазоследящего контура (или времени замыкания контура отслеживания кода), интегрированного в составе специализированной ИС. Данная процедура предпозиционирования характеризуется следующими данными:
ΔBDijk- полоса доплеровского предпозиционирования, связанная с высотой hj, частотой fi и k-м бортовым генератором.
ΔFija- ширина полосы доплеровского измерения, связанная с частотой fi и высотой hj при работе системы в режиме обнаружения.
NCDija - число доплеровских измерений для неавтономного поиска энергии на частоте fi, для высоты hj и k-го бортового генератора .
.
Тrmaxija - максимальная продолжительность неавтономного поиска энергии.
τija- период сканирования для диапазона предпозиционирования по дальности для короткого псевдослучайного кода Cci и высоты hj.
ΔTijk- ширина диапазона предпозиционировния по дальности.
выбирается так, чтобы
Тrmaxija<<Trmaxija.
ΔTacq- максимальная разность по времени между двумя неавтономными обнаружениями одного и того же радиомаяка.
 максимальный дрейф частоты радиомаяка за период ΔTacq.
максимальный дрейф частоты радиомаяка за период ΔTacq.
C использованием вышеприведенных параметров получим: .
.
Ширина ΔTijk может быть уменьшена, если оценка сдвига бортовых часов известна в бортовом приемнике ZZZ.
Бортовые навигационные системы могут прогнозировать доплеровскую частоту для центральной линии спектра радиомаяка и связанную с этим псевдодальность.
Предельные значения для обнаружения и сопровождения псевдослучайных кодов могут быть уменьшены, если прогнозирование доплеровского значения более точное, чем полоса прогнозирования ВFi.
Если уменьшение обеспечивается методом "только для кода", то контур несущей для приемного канала ZZZ разомкнут и цифровой управляемый генератор управляется прогнозируемым доплеровским значением.
Контур отслеживания кода приемного канала является контуром второго порядка и поддерживается доплеровскими измерениями. Он компенсирует ошибку между действительной доплеровской частотой и прогнозируемой доплеровской частотой и поддерживает цифровой управляемый генератор в контуре сервоуправления. Это используется для осуществления измерений псевдодальности.
Однако поскольку контур слежения за несущей разомкнут, то сообщение ZZZ больше не демодулируется. Этот способ, таким образом, обеспечивает отслеживание псевдослучайных кодов в обстановке с сильными источниками помех.
Метод "только для кода"; особенно полезен для приемников, находящихся на геостационарной орбите (типа h4).
Измерения псевдодальности корректируют этот случай, в отличие от доплеровских измерений, которые имеют низкие абсолютные значения.
Ложные обнаружения могут иметь место, когда отношения C/No малы, что может иметь место в случае приема ZZZ сигналов на геостационарной орбите.
Для выявления и режекции таких ложных обнаружений используются два метода:
Автономный контроль целостности приемника (метод RAIM)
Данный метод хорошо проверен для приемников GNSS. Он состоит в выполнении вероятностной проверки квадратичной суммы остатков для измерений псевдодальности. Для эффективности этого метода должно обнаруживаться минимальное число NRAIM радиомаяков.
Усиление надежности поиска энергии
Все позиции кодов, для: которых предел захвата в режиме "только для кода" превышен, должны фиксироваться, и должна выбираться позиция кода, связанная с значением максимум максиморум обнаруженной энергии, соответствующим главному корреляционному пику, что позволяет уменьшить риск ложных обнаружений при сканировании области поиска энергии.
При использовании на геостационарной орбите приемники должны первоначально обеспечивать:
- обработку сигналов: двух синхронизированных радиомаяков (т.е. распределение коэффициентов времени), принимаемых с превышением обычного порога обнаружения (т.е. без использования метода "только для кода"), или
- обработку сигналов; по меньшей мере NRAIM несинхронизированных радиомаяков, принимаемых с превышением обычного порога обнаружения.
В этом случае приемник может определять грубые параметры орбиты для расчета достаточно точного прогнозируемого доплеровского значения для использования по методу "только для кода". Сигналы радиомаяков, принимаемые с превышением обычного порога обнаружения фиксированными геостационарными спутниками, имеют географическую широту меньше предельного значения, в зависимости от состояния баланса соединения.
Однако такие исходные условия, описанные выше, не являются строго необходимыми для большинства геостационарных спутников в установленном положении. Максимальное доплеровское значение в действительности может быть меньше, чем прогнозируемая полоса ВFi. Это означает, что исходное доплеровское прогнозируемое значение, выдаваемое навигационной системой, может просто быть нулевым и обеспечивать обнаружение в режиме "только для кода", при условии, что бортовой генератор достаточно стабилен.
На фиг.30 приведен пример использования навигационной полезной нагрузки GNSS2 (на орбите типа h3 или h4).
На этом чертеже показан компьютер 200, связанный с блоками форматирования (для бортового построения орбиты и абсолютной синхронизации), соединенный с одночастотным приемником ZZZ 201, соединенным с антенной 206, блок высокостабильного генератора и гетеродина 202, генератор 203 сигнала L-диапазона системы GNSS2, соединенный с двумя антеннами 204 и 205.
Выбор типа приемника ZZZ (одночастотного или двухчастотного) осуществляется в функции требуемой точности построения орбиты и абсолютной бортовой синхронизации.
Навигационная полезная нагрузка оснащена системой глобальной калибровки, необходимой для осуществления процедуры абсолютной синхронизации. Эта система глобальной калибровки упрощается, если форматы для сигналов ZZZ и GNSS2 одинаковы.
Использование системы, соответствующей изобретению, для синхронизации часов
Система, соответствующая изобретению, может быть использована для определения разности по времени ΔTab между часами на двух радиомаяках а и b с высокой точностью.
Разность по времени ΔTa-sat между часами радиомаяка а и спутника определяется, как описано выше.
Разность по времени ΔTb-sat между часами радиомаяка b и спутника определяется, как описано выше.
Поэтому для мгновенного значения разности по времени ΔTab получим:
ΔTab = ΔTa-sat-ΔTb-sat.
Исходные (необработанные) измерения псевдодальности (связанные с радиомаяками а и b), используемые для этих вычислений, должны осуществляться одновременно.
Очевидно, что эта разность по времени может отфильтровываться на борту приемника ZZZ в реальном времени, или с более высокой точностью автономно в центре управления (стандартная синхронизация) или в центре обработки (прецизионная синхронизация).
Пример синхронизации сети ZZZ с использованием спутников на орбитах типа h2.
"Синхронизация" означает знание разности по времени между радиомаяками.
На фиг. 31 показан график, отображающий след на поверхности Земли при прохождении такого спутника над радиомаяками (здесь Вi - радиомаяки, наблюдаемые со спутника; С2i - круги наблюдаемости для спутника на высоте h2).
Разность по времени ΔTB1B2 между радиомаяком B1 и радиомаяком В2, определяется для круга наблюдаемости C21.
Аналогично, разности по времени, полученные для каждого круга наблюдаемости, представлены ниже последовательно.
Поэтому оценки разностей по времени между радиомаяками могут периодически подстраиваться.
Пример синхронизации сети ZZZ с использованием геостационарных спутников дополнительно к спутникам на орбите высоты h2 (дополнительный вариант)
Для геостационарных спутников след на Земле ограничен небольшой площадью, которая практически является точечной; потому по определению такой спутник всегда расположен над одним и тем же участком поверхности Земли.
Поэтому в рассмотренном примере радиомаяки В4, В5, В6, В7 и B8 непрерывно наблюдаются с геостационарного спутника, который поэтому может одновременно и непрерывно определять следующие разности по времени:
как показано на фиг.32 и 33.
В более общем случае число разностей по времени NΔT такого типа, связанных с n радиомаяками в круге наблюдаемости, определяется следующим образом: .
.
Поэтому ясно, что более выгодно использовать ведущие геостационарные спутники с приемниками ZZZ нa борту для синхронизации сети радиомаяков с более высокой точностью, чем это можно обеспечить с использованием спутников на маловысотной орбите или на гелиосинхронной орбите, при условии автономной навигации упомянутых геостационарных спутников.
В принципе, измерения псевдодальности, выполняемые всеми ведущими спутниками и некоторыми пользовательскими спутниками, могут использоваться для синхронизации сети, не требуя обязательного условия одновременной наблюдаемости всех радиомаяков.
Решающим преимуществом системы, соответствующей изобретению, является возможность использования технологии С/А -кодов системы GPS (или GNSS) для частот f1 и f2.
В этом случае стоимость одночастотных приемников ZZZ, производимых с использованием конкурентоспособной промышленной технологии, будет сходна со стоимостью приемников системы GPS, для эквивалентной точности навигации, или лучше для приемников ZZZ (отсутствие "селективной доступности", "средств контррадиоэлектронного подавления", лучшее позиционирование излучающих опорных источников, расположенных на Земле).
Более того, стоимость двухчастотных опорных приемников ZZZ может быть более конкурентоспособной, чем стоимость двухчастотных приемников - систем GPS или GLONASS, поскольку, в отличие от последних, они не требуют технологии, предназначенной для отслеживания длинных кодов. Кроме того, для двухчастотных приемников гражданского применения системы GPS имеют место дополнительные затраты, обусловленные использованием схем "бескодовых" измерений.
Иными словами, система ZZZ, соответствующая изобретению, является более конкурентоспособной, чем системы GPS или GLONASS для большинства применений в космосе. Те же самые обоснования являются справедливыми еще в большей степени в отношении нынешних систем DORIS или PRARE. Кроме того, система, соответствующая изобретению, потенциально имеет более высокую эффективность, чем все остальные системы для большинства применений, связанных с космосом.
Источники информации
1. M. Dorrer. Le systeme DORIS (Космические системы определения местоположения и навигации), Toulouse, March 1989, CNES (Французский Национальный Центр космических исследований).
2. J. P. Berthias, C.Jayles, D.Pradines. Calcul d'orbite a bord de SPOT avec DORIS (Бортовое вычисление орбиты с использованием системы DORIS), (представлено на симпозиуме "Космические системы обнаружения и определения положения", организованном Обществом инженеров по электротехнике и электронике 3 февраля 1993 г.).
3. F. Nouel, J.P.Berthias et al. Precise Centre National d'Etudes Spatiales orbits for TOPEX/POSEIDON: is reaching 2 cm still a challenge? (Journal of Geophysical Research, v.99, N C12, p. 24; 405-24. 419, December 1994).
4. N. de Cheyzelles. Le systeme de localisation et de navigation GPS-NAVSTAR (Система определения местоположения и навигации GPS-NAVSTAR). Space Positioning and Navigation Systems, Toulouse, March 1989, CNES.
5. Technical Description and Characteristics of Global Space Navigation System GLONASS-M (RTCA Paper N 502.94/SC159-594).
6. W.Lechner, Ch. Reigber. The PRARE/GPS Experiment - A Contribution to Geodesy, Geodynamics and Navigation (Спутниковая навигация. Конференция Королевского общества по навигации, 1989).
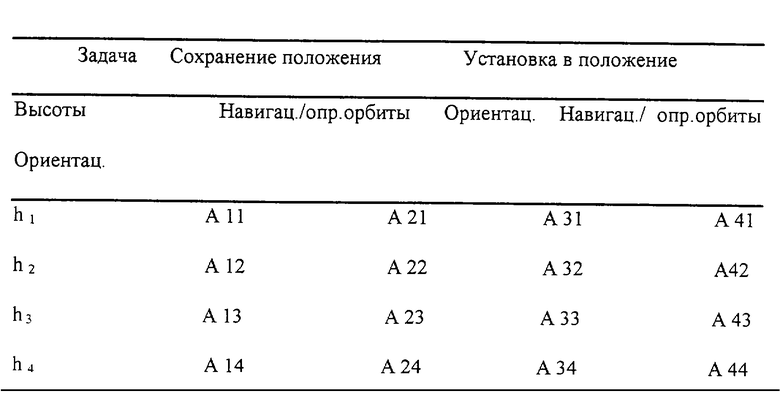
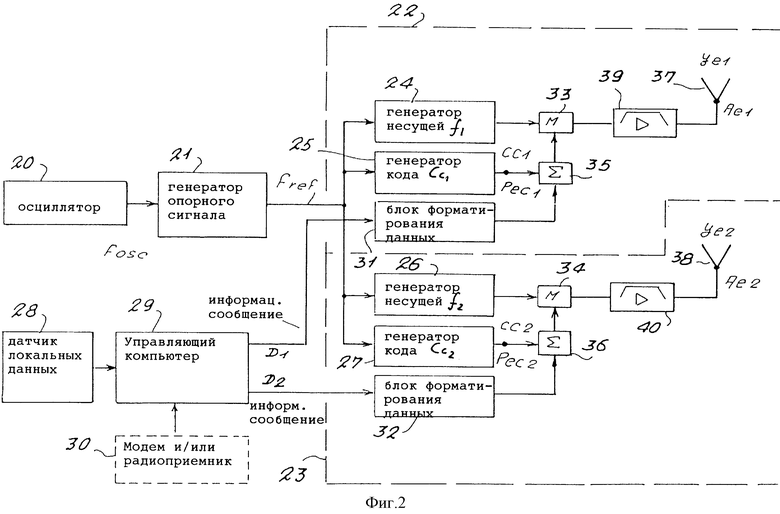

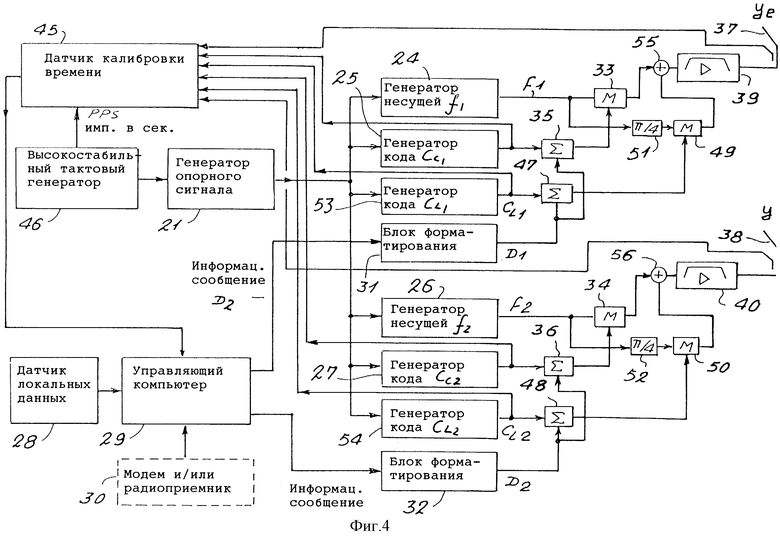
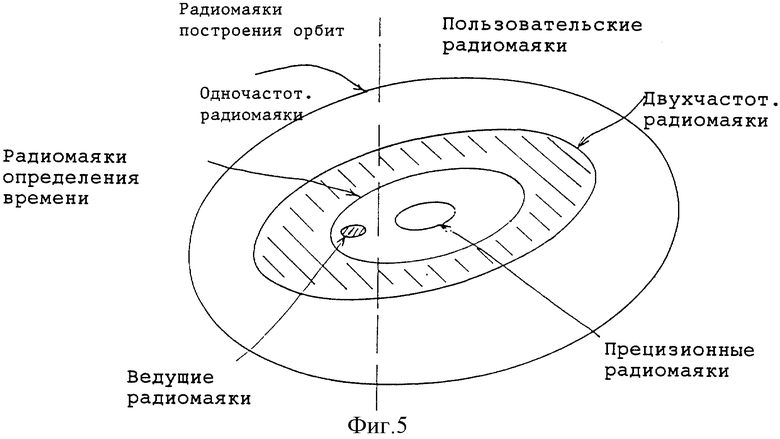
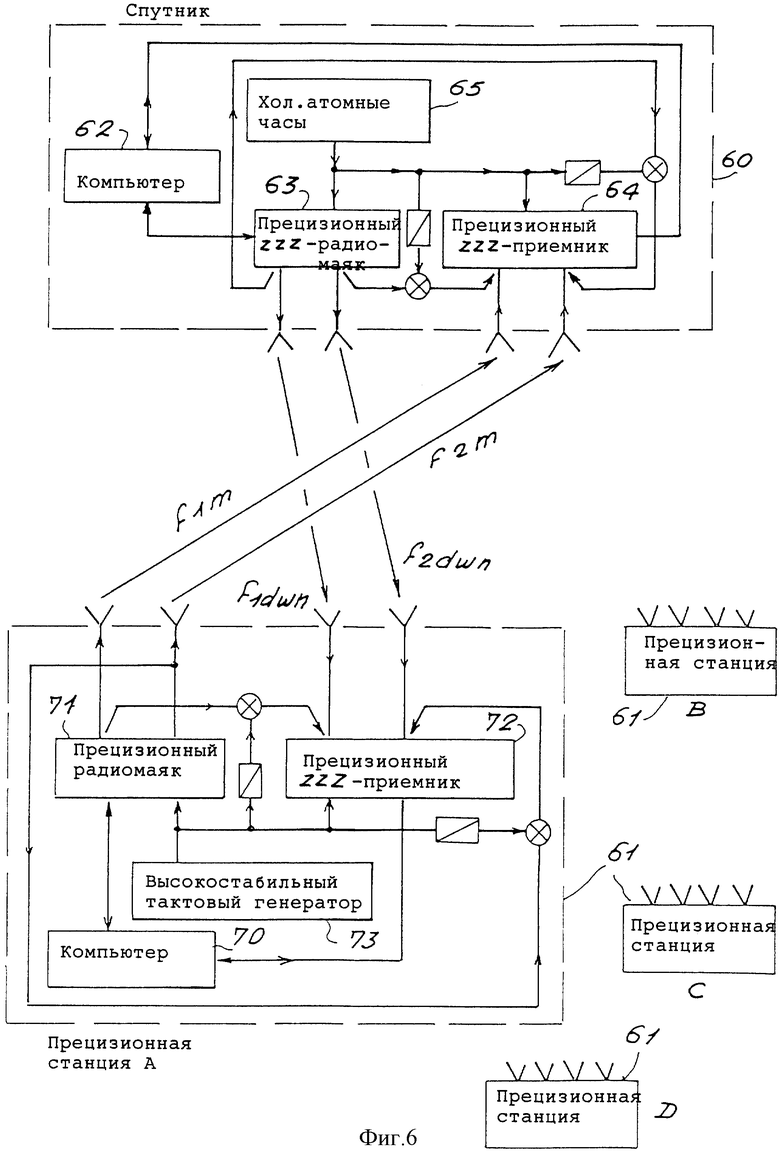
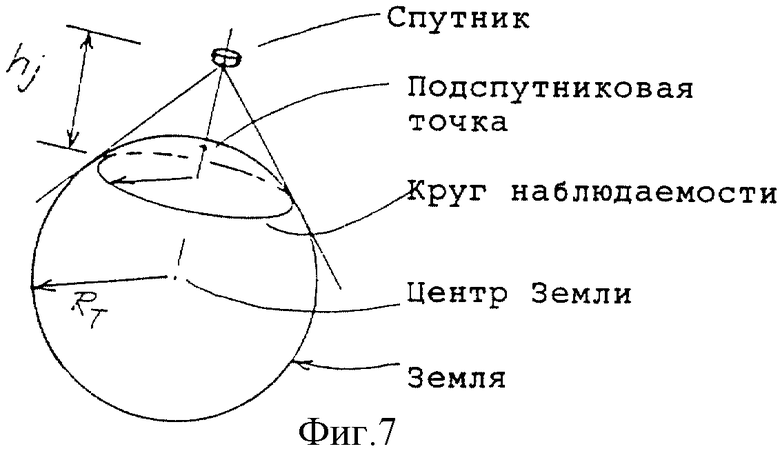
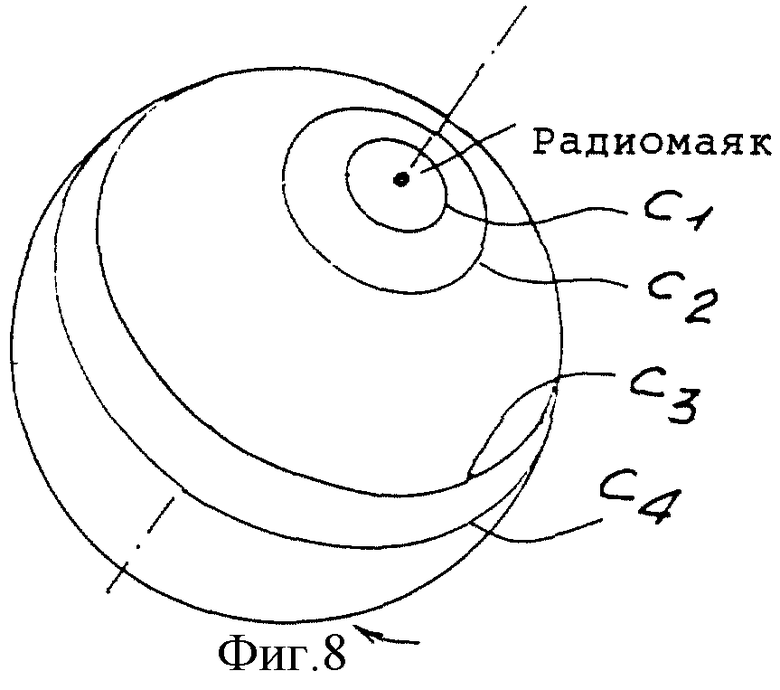
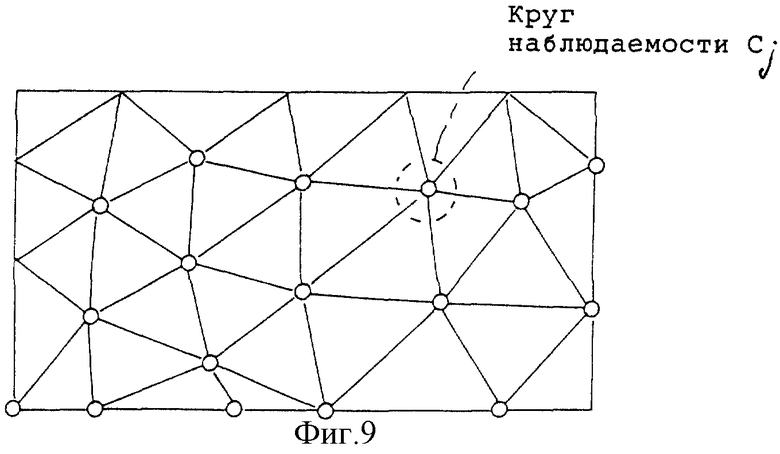

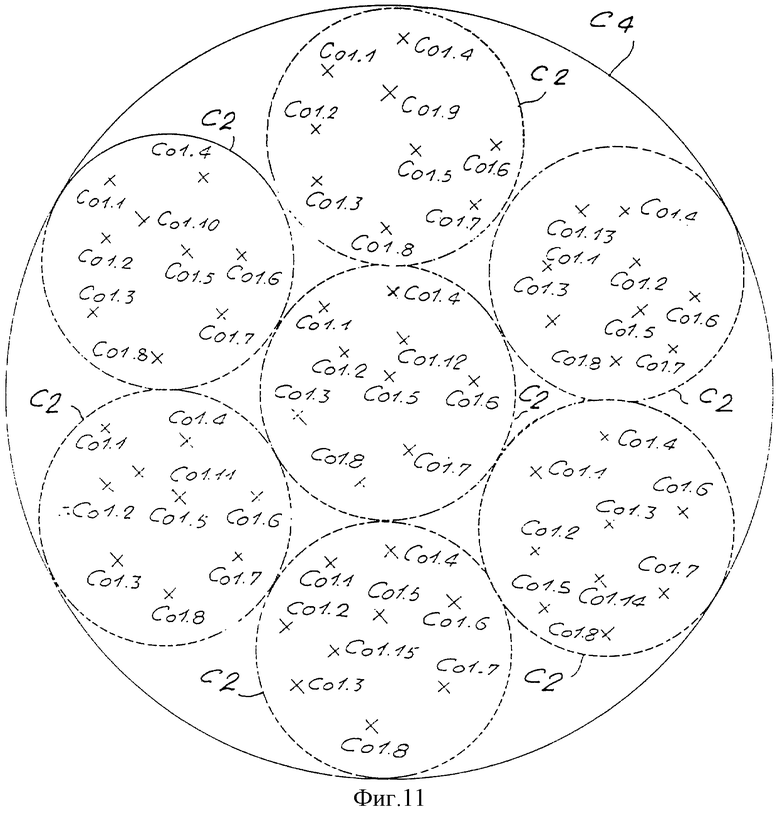
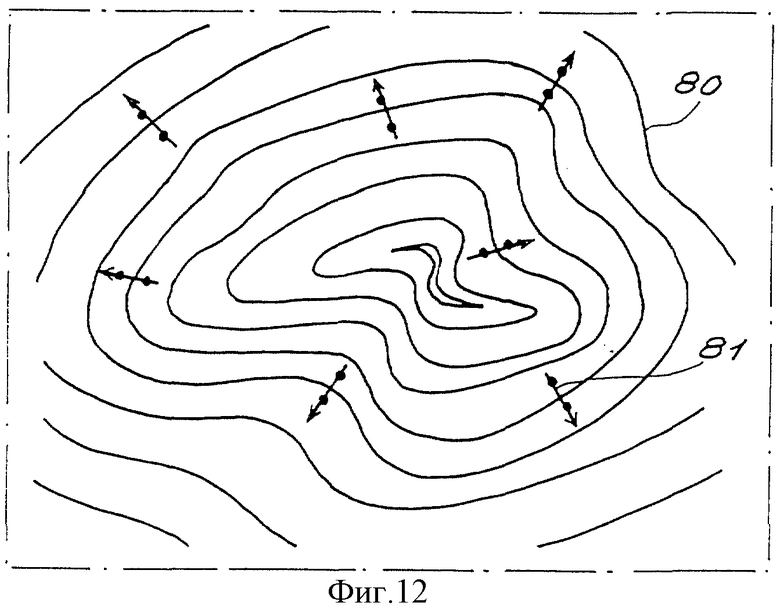

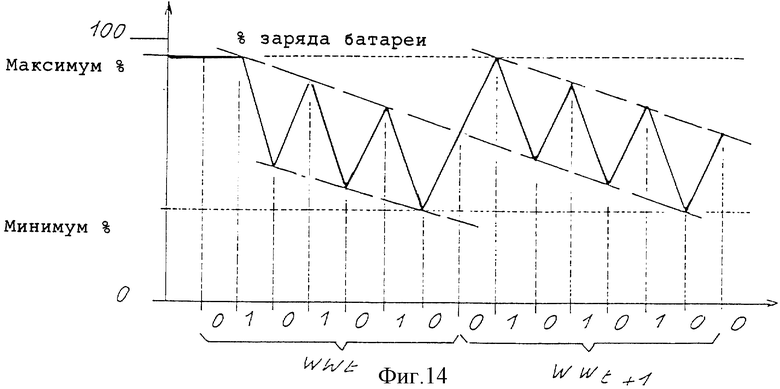
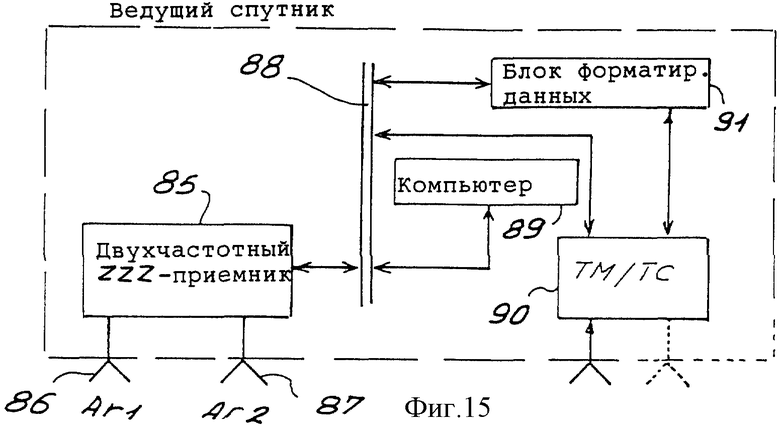

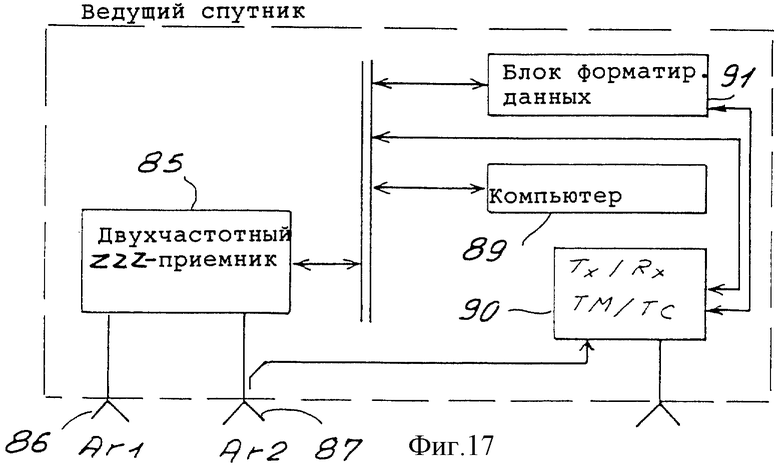
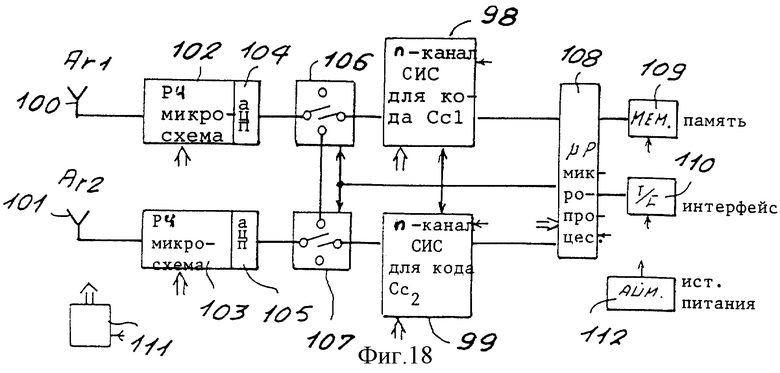
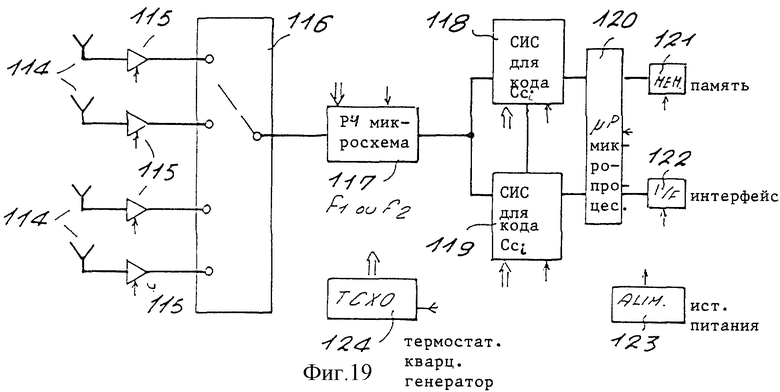
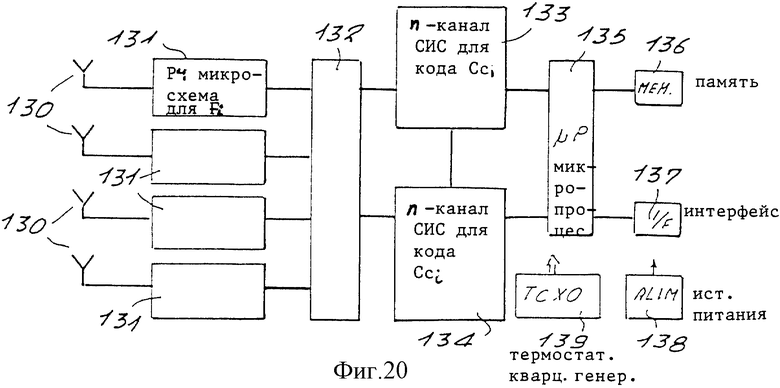
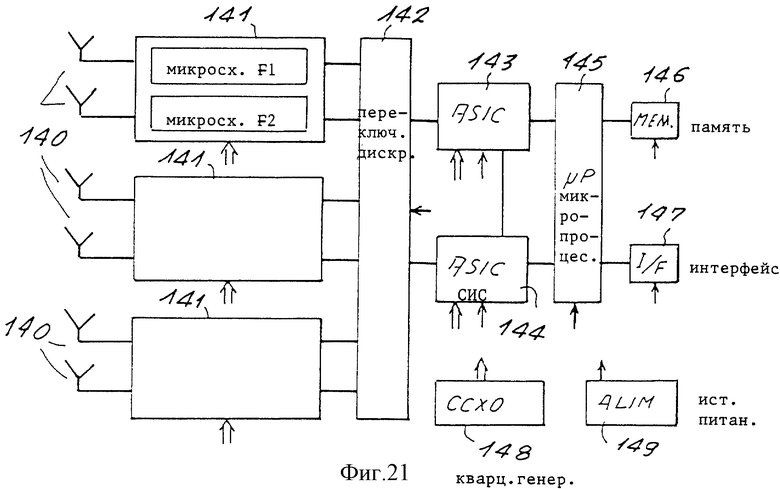
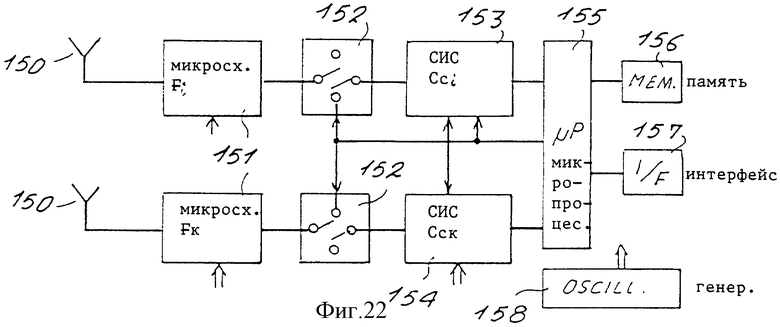
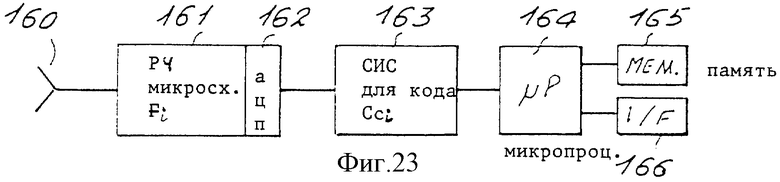

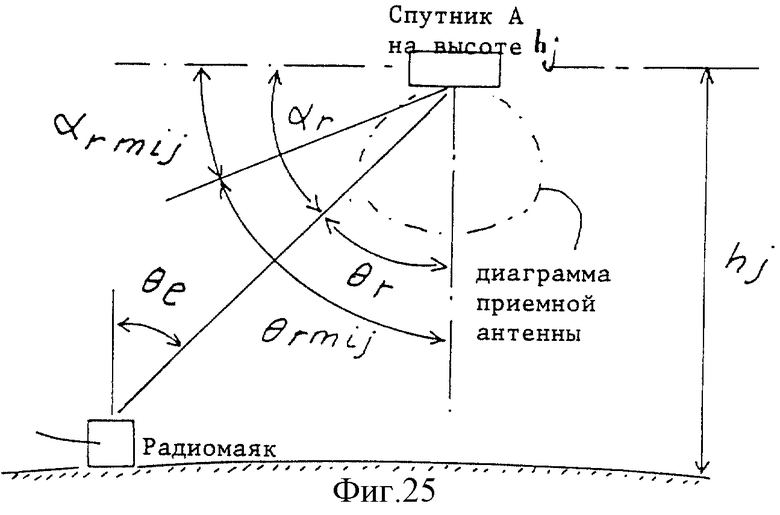
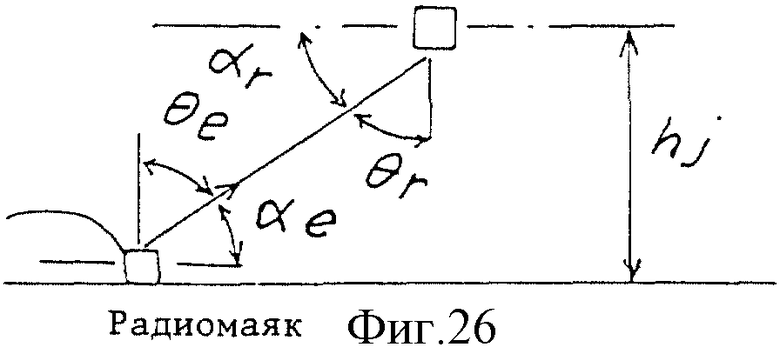
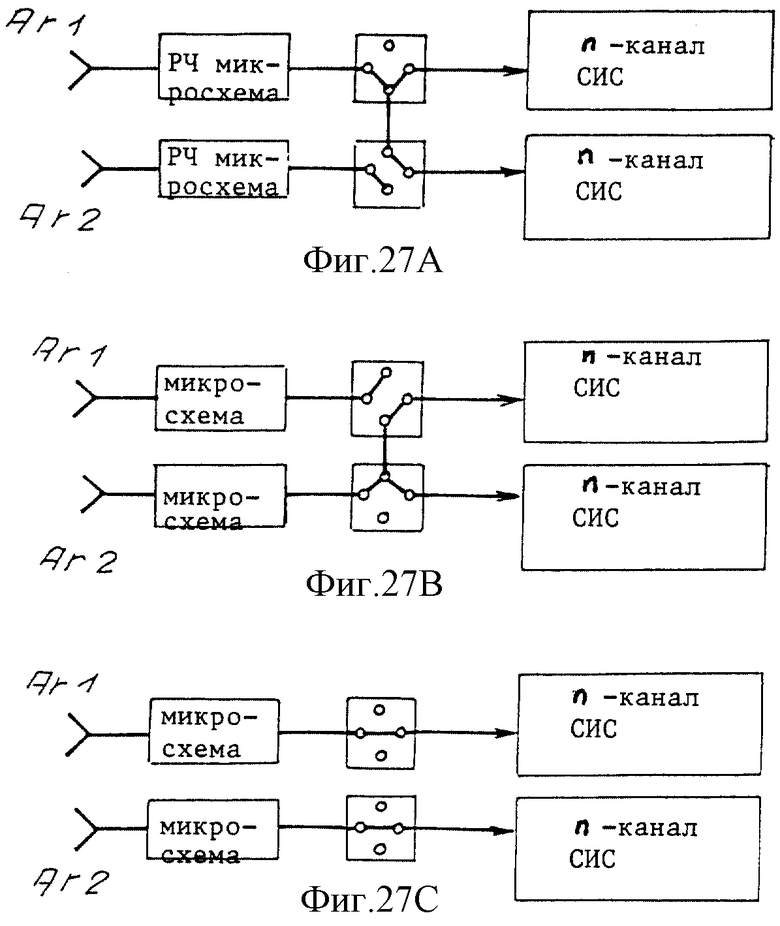
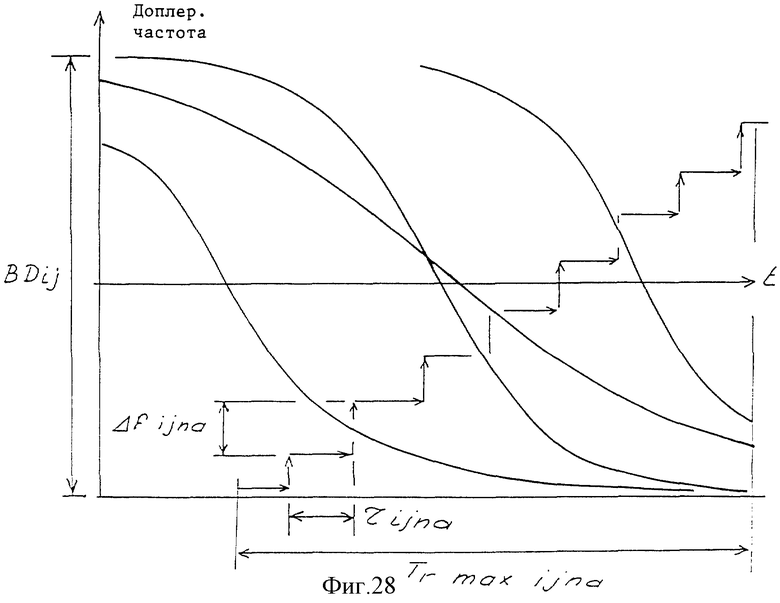
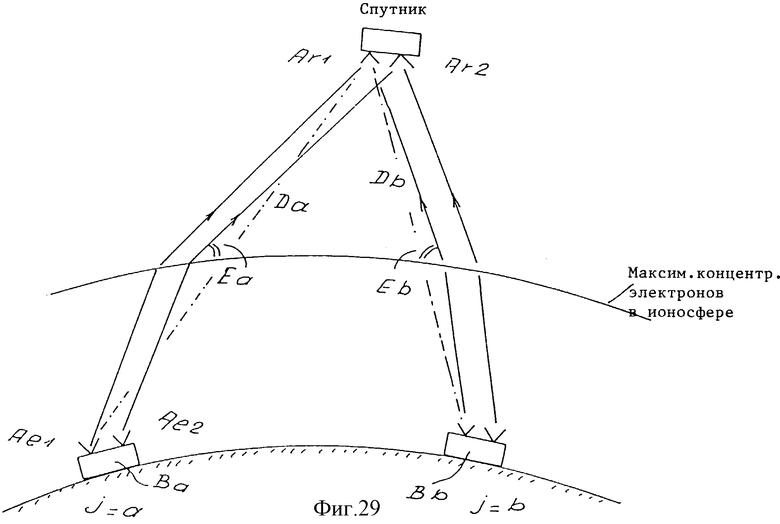
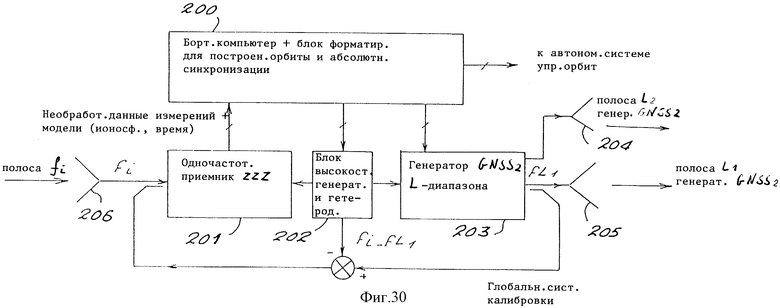
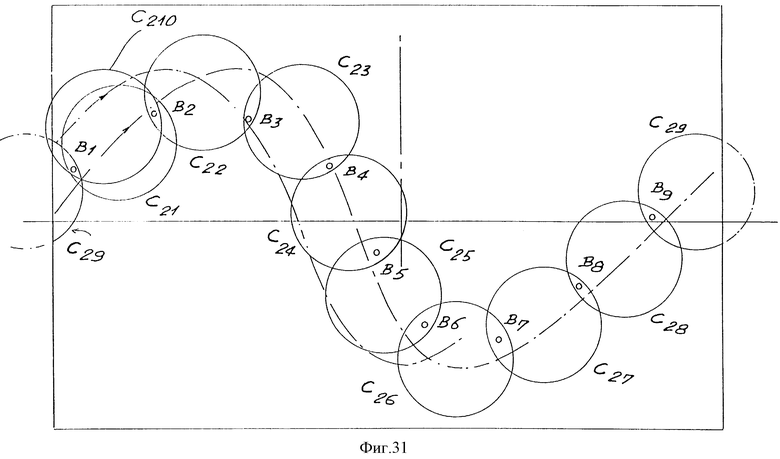
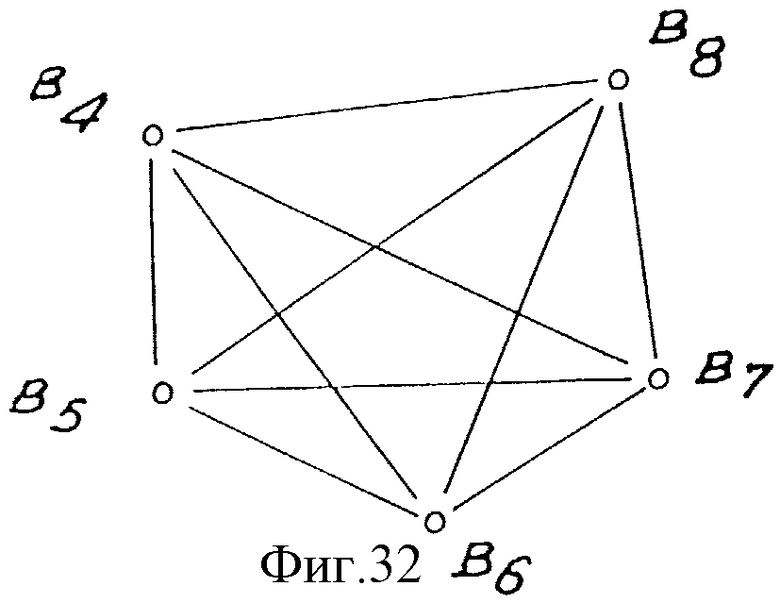
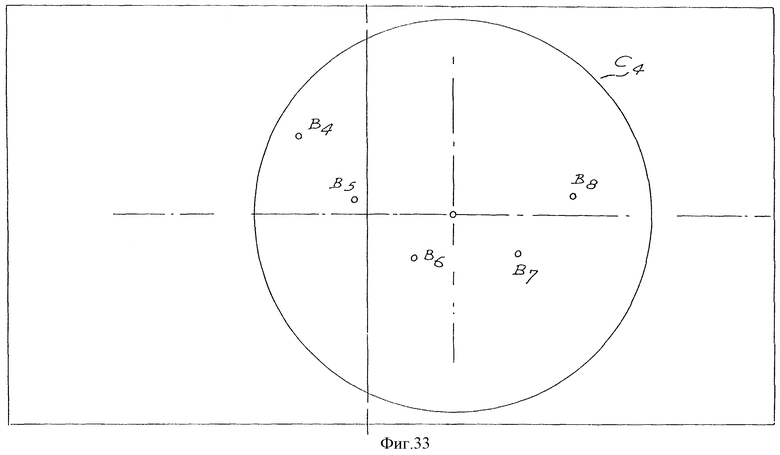
Изобретение относится к глобальной системе, предназначенной для радионавигации и радиоопределения местоположения, содержащей сегмент наземного базирования, включающий в себя глобальную сеть радиомаяков на земной поверхности, излучающих радиосигналы с широким спектром в направлении пользовательских спутников, центр управления, предназначенный для формирования плана функционирования для определенных пользовательских спутников и его передачи при пролете этих спутников над ведущими радиомаяками; центр обработки, предназначенный для приема дистанционных измерений, отсортированных центром управления, разделения дистанционных измерений на дистанционные измерения, необходимые для процедур обработки, осуществляемых в центре обработки, и на дистанционные измерения, требуемые пользователям услуг, предоставляемых указанной системой; сегмент космического базирования, включающий в себя ведущие спутники, совместно участвующие в работе системы, и пользовательские спутники, пользовательский сегмент, состоящий из пользовательских радиомаяков и стационарных или мобильных пользовательских приемников. Достигаемым техническим результатом изобретения является высокая точность и эффективность при решении различных задач радионавигации и местоопределения. 3 с. и 29 з.п. 33 ил., 1 табл.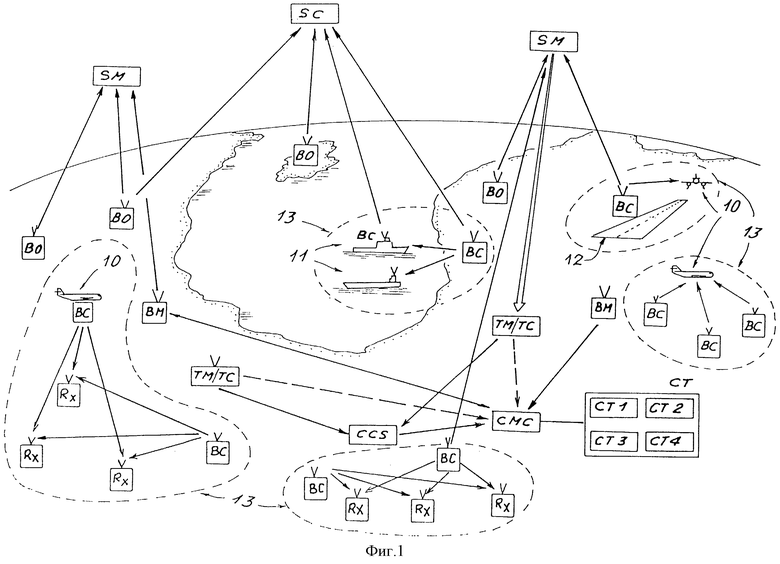
| WO 8201076 А, 01.04.1982 | |||
| RU 94018148 А1, 20.03.1996 | |||
| АППАРАТ ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ТЕКСТИЛЬНЫХ НИТЕЙ ГАЗООБРАЗНЫМИ АГЕНТАМИ ПОД ДАВЛЕНИЕМ | 0 |
|
SU242115A1 |
| US 4445118 А, 20.04.1984 | |||
| СПОСОБ ПОЛУЧЕНИЯ КОНЬЯЧНОГО и ТОМУ ПОДОБНЫХСПИРТОВ | 0 |
|
SU245714A1 |
| US 4918609 А, 17.04.1990. | |||

