Изобретение относится к способам дистанционного гидравлического управления исполнительными устройствами поворота воздушных, водных и подводных судов; к дистанционному рулевому управлению самоходной машины.
Известны способы дистанционного гидравлического управления, например, по: [1] с.150…154, рис.4.23…4.31; ГОРУ [2] с.156, 157; по RU 2420421 [3] и др.
Недостаток способа по [1] в том, что пропорционально перемещению рукоятки управления перемещают только золотник гидрораспределителя, а не шток исполнительного гидроцилиндра Недостаток способов по [2] и [3] в том, что в процессе работы накапливается ошибка между позицией направляющих колес и отклонением руля от позиции, соответствующей прямолинейному движению. Поэтому, если в начале работы одна из спиц руля, например трактора, находилась в продольно-вертикальной плоскости в позиции направляющих колес, соответствующей прямолинейному движению, то через некоторое время работы эта спица постепенно отклоняется от упомянутой плоскости на любой угол при позиции направляющих колес, соответствующей прямолинейному движению. Для тракторов и других тихоходных машин это неудобство допустимо. Для автомобилей, на наш взгляд, нежелательно. Недостаток способа по [2] еще в том, что направляющие колеса, выведенные из позиции прямолинейного движения помехами (например ухабом, рытвиной), в позицию прямолинейного движения возвращают только соответствующим поворотом руля руками.
Общий недостаток способов по [1], [2], [3] и др. в том, что этими способами невозможно корректно управлять направляющими колесами нескольких мостов направляющих колес одной и той же самоходной машины.
Известен способ дистанционного гидравлического управления поворотом транспортного средства, по которому создают сигнал поворота транспортного средства вращением руля, преобразуют этот сигнал в поток масла от насоса, соответствующий углу поворота руля и направляют поток масла по управляющим маслопроводам к гидроцилиндру, которым поворачивают исполнительное устройство поворота транспортного средства соответственно углу поворота руля, например способ по RU 2420421 [3], принятый за прототип.
Недостатки его те же, что приведены выше.
Задачей и техническим результатом изобретения является сохранение взаимнонеизменным однозначного соответствия позиций руля и устройства поворота транспортного средства: воздушного, надводного, подводного судна, трактора, автомобиля, др., в частности, направляющих колес (как с одинарными, так и со сдвоенными шинами) одного и более мостов самоходной машины, установленных без развала, схождения и продольного наклона шкворня.
Сущность изобретения в том, что способ дистанционного гидравлического управления поворотом транспортного средства, по которому создают сигнал поворота транспортного средства вращением руля, преобразуют этот сигнал в поток масла от насоса, соответствующий углу поворота руля, и направляют поток масла по управляющим маслопроводам к гидроцилиндру, которым поворачивают исполнительное устройство поворота транспортного средства соответственно углу поворота руля, в соответствии с изобретением, сигнал поворота, созданный вращением руля, преобразуют в давление потока масла в дистанционных управляющих маслопроводах, однозначно соответствующее углу поворота руля от позиции, соответствующей прямолинейному движению транспортного средства, причем этим давлением после достижения им расчетной величины в конце свободного хода руля сжимают пороговую пружину и соответственно величине сжатия пороговой пружины перемещают золотник гидрораспределителя, сообщенного гидравлически с гидроцилиндром исполнительного устройства поворота транспортного средства, который связан механически отрицательной обратной связью с гидрораспределителем.
Благодаря таким признакам сохраняют неизменным однозначное соответствие позиций руля позициям исполнительного устройства поворота транспортного средства, в частности направляющих колес одного и более мостов самоходной машины. При этом увеличивают устойчивость прямолинейного движения самоходной машины направляющими колесами и с одинарными, и со сдвоенными шинами, установленными без развала, схождения, продольного наклона их шкворня. Выполняют автоматический возврат руля и направляющих колес в позицию прямолинейного движения после поворота, если от этого возврата руль не удерживают руками.
Известно дистанционное рулевое управление самоходной машины, содержащее руль и устройство преобразования угла поворота руля в соответствующий поток масла к гидроцилиндру поворота направляющих колбес, например, по RU 2420421 [3], которое принято за прототип.
Недостаток его в том, что в процессе работы накапливается ошибка между позицией направляющих колес и отклонением руля от позиции, соответствующей прямолинейному движению, что, на наш взгляд, нежелательно особенно для автомобилей. Недостаток еще в том, что направляющие колеса необходимо устанавливать с развалом, схождением и продольным наклоном шкворня. Поэтому сдвоенные шины на них нагружают неравномерно и поэтому устанавливают только на тихоходных машинах для особых условий работы, из-за интенсивного износа протектора шин.
Задачей и техническим результатом изобретения является сохранение взаимнонеизменным однозначного соответствия позиций руля и направляющих колес самоходной машины, а также возможность равномерно нагружать сдвоенные шины на направляющих колесах для уменьшения их износа, упрощение шарнирного узла поворота колеса.
Сущность изобретения в том, что дистанционное рулевое управление самоходной машины, содержащее руль и преобразователь угла поворота руля в соответствующий поток масла к гидроцилиндру поворота направляющих колес, в соответствии с изобретением содержит преобразователь угла поворота руля в давление потока масла, однозначно соответствующее каждому углу поворота руля от позиции, соответствующей прямолинейному движению самоходной машины, причем пребразователь включает регулируемые рулем через понижающую механическую передачу гидроклапаны давления масла в дистанционных управляющих маслопроводах, соединяющих насос с гидроцилиндром, имеющим возможность преобразовывать давления масла в соответственно однозначные перемещения штока, связанным кинематически с установленной между неподвижными упорами центрирующей пороговой пружиной, и связанным кинематически с гидрораспределителем гидроусилителя поворота направляющих колес, причем управляющие каналы гидрораспределителя сообщены с гидроцилиндром поворота направляющих колес, связанным механически с гидрораспределителем отрицательной обратной связью.
Благодаря этому сохраняют неизменным однозначное соответствие позиций руля и направляющих колес самоходной машины, равномерно нагружают сдвоенные шины, уменьшают их износ, упрощают узел поворота колеса.
Устроено дистанционное рулевое управление (ДРУ) самоходной машины (далее машины), например, так:
На фиг. изображена принципиальная схема ДРУ со следующими условными обозначениями:
1 - направляющее колесо, связанное с тягой рулевой трапеции моста направляющих колес, (далее колесо),
2 - отдельный для каждого моста колес 1 гидроусилитель поворота колес 1 (далее усилитель),
3 - усилителя 2 с двумя штоками гидроцилиндр поворота колес 1 (далее цилиндр),
4 - усилителя 2 с двумя штоками гидроцилиндр, имеющий возможность преобразовывать давления масла в соответственно однозначные перемещения штока, (далее цилиндр),
5 - усилителя 2 гидрораспределитель с отрицательным перекрытием золотника (далее распределитель),
6 - центрирующая пороговая пружина, сжатая на расчетное пороговое усилие гайками на винте, прикрепленном к торцу штока цилиндра 4 (далее пружина),
7 - прикрепленный к балке моста колес 1 упор с отверстием для винта с гайками сжатия пружины 6 (далее упор),
8 - насосная станция, содержащая типовой комплект гидроаппаратов: емкость для масла, с обратными клапанами два насоса, причем один из них связан с первичным валом коробки переключения передач (далее КПП) машины, а второй - со вторичным валом КПП, предохранительный клапан, клапан расхода [4] с.180, рис.126, масляный фильтр, редукционный клапан, отдельный с обратным клапаном маслопровод, соединяющий емкость для масла с выходным каналом насосной станции гидравлически параллельно перечисленным гидроаппаратам (далее питатель),
9 - делитель потока масла (далее делитель),
10 - маслопровод, сообщающий напорный канал распределителя 5 с питателем 8 через делитель 9 (далее маслопровод),
11 - маслопровод, сообщающий сливной канал распределителя 5 с емкостью для масла питателя 8 (далее маслопровод),
12 - руль самоходной машины (далее руль),
13 - преобразователь угла поворота руля в давление потока масла, однозначно соответствующее каждому углу поворота руля 12 от его позиции, соответствующей прямолинейному движению машины, (далее преобразователь),
14 - понижающая механическая (червячная) передача, для которой руль 12 - входное звено, (далее передача),
15 - ведомый рычаг передачи 14 (далее рычаг),
16 - гидроклапан преобразователя 13, аналогичный предохранительному клапану непрямого действия типа 510.32.10 [4] с.177, рис.4.54, но для повышения плавности управления его выполняют с более длинной и менее жесткой пружиной (рис.4.54, позиция 5) и с соответственно удлиненными сопряженными деталями гидроклапана, причем эту пружину поджимают стержнем, который вместо регулировочного винта устанавливают между упомянутой пружиной и консольным концом рычага 15, (далее клапан),
17 - дистанционный управляющий маслопровод, сообщающий с преобразователем 13 левые полости цилиндров 4 усилителей 2 всех мостов направляющих колес 1 (далее маслопровод),
18 - дистанционный управляющий маслопровод, сообщающий с преобразователем 13 правые полости цилиндров 4, усилителей 2 всех мостов направляющих колес 1 (далее маслопровод),
19 - насос шестеренный двухсекционный типа НШ-10-10-2 [5] с.13 (далее насос),
20 - масляный фильтр с редукционным клапаном (далее фильтр),
21 - емкость с маслом (далее бак),
22 - напорные маслопроводы, сообщающие преобразователь 13 с насосом 19, (далее маслопроводы),
23 - сливной маслопровод, сообщающий преобразователь 13 через фильтр 20 с баком 21 (далее маслопровод).
Каждое колесо 1 со сдвоенной (в другом варианте с одинарной) шиной через рычаг его поворота усилителем 2 соединено тягой трапеции со штоком цилиндра 3, полости которого сообщены с управляющими каналами распределителя 5. Его входной канал сообщен с питателем 8 маслопроводом 10 через делитель 9. Рычаг, прикрепленный перпендикулярно оси колеса, соединен со штоком цилиндра 4 через корпус и золотник распределителя 5. К торцу другого штока этого цилиндра прикреплен винт с пружиной 6, поджатой гайками на расчетное пороговое усилие. Эта пружина с гайками расположена между двумя упорами, прикрепленными к балке моста так, что пружина находится в контакте с ними через гайки на винте. Всех мостов (при любом их количестве) направляющих колес машины одноименные (правые, левые) полости цилиндров 4 сообщены гидравлически параллельно между собой маслопроводами 17 и 18. Эти маслопроводы сообщены также с управляющими каналами преобразователя 13.
Руль 12 соединен с преобразователем 13, включающим передачу 14, рычаг 15 и клапаны 16. Рычаг 15 так связан кинематически с регулирующими пружинами клапанов 16, что в позиции руля 12, соответствующей прямолинейному движению машины, регулирующие пружины клапанов 16 расположены с двух сторон консольного конца рычага 15 в плоскости его качания. При этом в позиции руля 12, соответствующей прямолинейному движению машины, сжатие регулирующих пружин одинаковое или равно нулю. Напорные каналы преобразователя сообщены маслопроводами 22 с насосом 19, а сливные - маслопроводами 23 с баком 21. Оси колес 1 в позиции прямолинейного движения лежат на общей прямой (при независимой подвеске - на параллельных прямых), т.е. без развала, схождения, наклона шкворня.
Работа. Пусть колеса 1 и руль 12 находятся в позиции прямолинейного движения при работающем двигателе машины, а распределитель 5 находится в нейтральной позиции. Поэтому масло от питателя 8, через делитель 9, маслопровод 10, распределитель 5, маслопровод 11 возвращают в емкость для масла питателя 8. При этом обе полости цилиндра 3 через распределитель 5 сообщены с маслопроводами 10, 11, а сжатие пружин клапанов 16 рычагом 15 равно пусть нулю. Пружина 6 поджата гайками на расчетную пороговую величину так, что давление масла, вызванное небольшим гидравлическим сопротивлением клапанов и маслопроводов также небольшое, одинаковое в маслопроводах 17, 18 и недостаточно для сжатия цилиндром 4 пружины 6. Поэтому масло от насоса 19 перетекает через маслопроводы 22, клапаны 16, маслопровод 23, фильтр 20 в бак 21. При этом руль удерживают в исходной позиции не руками, а пружинами клапанов 16 и пусть далее включают движение машины.
Пусть правым (левым) колесом 1 переднего моста наехали на ухаб (рытвину) и толчком от ухаба колесо 1 поворачивают вправо (влево). Через звенья рулевой трапеции поворачивают вправо (влево) левое (правое) колесо, смещают вправо (влево) поршень цилиндра 3, и влево (вправо) корпус распределителя 5 относительно его золотника, удерживаемого неподвижно пружиной 6. Этим переключают распределитель на подачу масла от питателя 8 в правую (левую) полость цилиндра 3, смещают маслом поршень цилиндра 3 влево (вправо) до восстановления позиции колес 1, соответствующей прямолинейному движению машины. Одновременно корпус распределителя 5 смещают вправо (влево) до восстановления нейтральной позиции распределителя 5. (Примечание: на схеме распределителя 5 квадратик со стрелками, указывающими направление потока масла, мысленно перемещают вправо-влево в сторону маслопроводов 10, 11 вслед за перемещением золотника относительно корпуса распределителя).
Пусть руль 12 поворачивают вправо (влево). Этим передачей 14 поворачивают рычаг 15 вправо (влево). Его консольным концом через стержень сжимают регулировочную пружину правого (левого) клапана 16, чем повышают давление масла в маслопроводе 18 (17) однозначно соответственно углу поворота руля. Действием этого давления перемещают шток цилиндра 4 на переднем и заднем мосту влево (вправо) и сжимают каждую пружину 6 также однозначно соответственно величине давления масла, пороговому усилию сжатия и характеристике пружины. Если пороговое усилие сжатия пружин 6 одинаково, то их деформация и ход штоков цилиндров 4 также одинаковы. В противном случае - разные. Если пороговое усилие пружины 6 заднего моста больше на расчетную величину, чем пороговое усилие пружины 6 переднего моста, то колеса 1 заднего моста начнут поворачивать только после того, как колеса 1 переднего моста повернут на расчетный угол соответственно увеличенным давлением масла. При этом, как видно из схемы на фиг. колеса 1 заднего моста поворачивают противоположно повороту колес переднего моста. Во время вращения руля вправо (влево) от позиции, соответствующей прямолинейному движению, машину направляют по траектории поворота вправо (влево) по дуге траектории все меньшего радиуса. При этом колеса 1 поворачивают со скоростью, пропорциональной скорости вращения руля, если расчет параметров, изготовление усилителя 2 и питателя 8 выполнили корректно. При удержании повернутого руля машину направляют по дуге постоянного радиуса, то есть направляют по дуге окружности.
Пусть после некоторого поворота руля вправо (влево) и соответствующего поворота передних колес 1 вправо (влево) и задних колес 1 влево (вправо) руль далее не удерживают. Поэтому руль усилием регулировочной пружины правого (левого) клапана 16 поворачивают влево (вправо) в позицию, соответствующую прямолинейному движению машины. Этим давление в маслопроводе 18 понижают, пружиной 6 перемещают шток и цилиндр 4 переднего и заднего мостов влево (вправо), золотник задвигают в корпус распределителя 5. Этим масло от питателя 8 направляют в правую (левую) полость цилиндра 3, его поршень, шток переднего и заднего мостов перемещают, а колеса 1 поворачивают влево (вправо) до позиции, соответствующей прямолинейному движению машины. То же происходит, если руль возвращать в позицию, соответствующую прямолинейному движению, руками. При этом колеса поворачивают со скоростью, пропорциональной скорости вращения руля.
Итак, по изобретению:
1. Сохраняют неизменным однозначное соответствие позиций руля позициям исполнительного устройства поворота транспортного средства, в частности, направляющих колес одного и более мостов самоходной машины.
2. Увеличивают устойчивость прямолинейного движения самоходной машины с направляющими колесами и с одинарными, и со сдвоенными шинами, установленными без развала, схождения, продольного наклона их шкворня.
3. Выполняют автоматический возврат руля и направляющих колес в позицию прямолинейного движения после поворота, если от этого возврата руль не удерживают руками.
4. Равномерно нагружают сдвоенные шины направляющих колес, уменьшают их износ, упрощают узел поворота колеса.
Источники информации:
1. Васильченко В.А. Гидравлическое оборудование мобильных машин: Справочник - М.: Машиностроение, 1983, 301 с.
2. Тракторы «Беларусь» класса 1, 4. Пособие по агрегатированию. ПО МТЗ им. В.И. Ленина, Минск, 1990, 300 с.
3. RU 2420421 C2 МПК B62D 5/06 (2006.01) Способ гидроусиления дистанционного рулевого управления и система рулевого управления для его осуществления. Описание изобретения к патенту. 8 с. Опублик.: 10.06.2011 Бюл. №16.
4. Трактор Т-150 (устройство и эксплуатация). Под ред. Б.П. Кашубы и И.А. Коваля. М.: Колос, 1976, 312 с.
5. Гидравлическое оборудование для тракторов, сельскохозяйственных и дорожно-строительных машин. Трактороэкспорт. Внешторгиздат. Изд. №334136.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ МОСТОВ САМОХОДНОЙ МАШИНЫ | 2011 |
|
RU2464194C1 |
| СПОСОБ ГИДРОУСИЛЕНИЯ ДИСТАНЦИОННОГО РУЛЕВОГО УПРАВЛЕНИЯ И СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420421C2 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ВСЕМИ КОЛЁСАМИ ТРАКТОРА | 2013 |
|
RU2545157C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| ТРАКТОР-УНИВЕРСАЛ С ШАРНИРНО СОЕДИНЁННЫМИ ПОЛУРАМАМИ | 2014 |
|
RU2576847C2 |
| ПРОПАШНОЙ ГУСЕНИЧНЫЙ ТРАКТОР | 2009 |
|
RU2392163C1 |
Изобретения относятся к области транспортного машиностроения. Дистанционное рулевое управление самоходной машины содержит руль и преобразователь угла поворота руля в соответствующий поток масла к гидроцилиндру поворота направляющих колес. Преобразователь включает регулируемые рулем через понижающую механическую передачу гидроклапаны давления масла в дистанционных управляющих маслопроводах. Маслопроводы соединяют насос с гидроцилиндром. Гидроцилиндр имеет возможность преобразовывать давление масла в перемещения штока и связан кинематически с установленной между неподвижными упорами центрирующей пороговой пружиной. Гидроцилиндр связан кинематически с гидрораспределителем гидроусилителя поворота направляющих колес. Управляющие каналы гидрораспределителя сообщены с гидроцилиндром поворота направляющих колес, связанным механически с гидрораспределителем обратной связью. Способ управления поворотом транспортного средства, по которому создают сигнал поворота транспортного средства вращением руля. Преобразуют этот сигнал в поток масла от насоса, соответствующий углу поворота руля, и направляют поток масла по управляющим маслопроводам к гидроцилиндру. Гидроцилиндром поворачивают исполнительное устройство поворота транспортного средства соответственно повороту руля. Сигнал поворота преобразуют в давление потока масла в управляющих маслопроводах, однозначно соответствующее углу поворота руля, от позиции, соответствующей прямолинейному движению транспортного средства. Давлением потока масла после сжимают пороговую пружину после достижения им расчетной величины в конце свободного хода руля и соответственно величине сжатия пороговой пружины перемещают золотник гидрораспределителя. Достигается соответствие позиций руля позициям исполнительного устройства поворота транспортного средства. 2 н.п. ф-лы, 1 ил.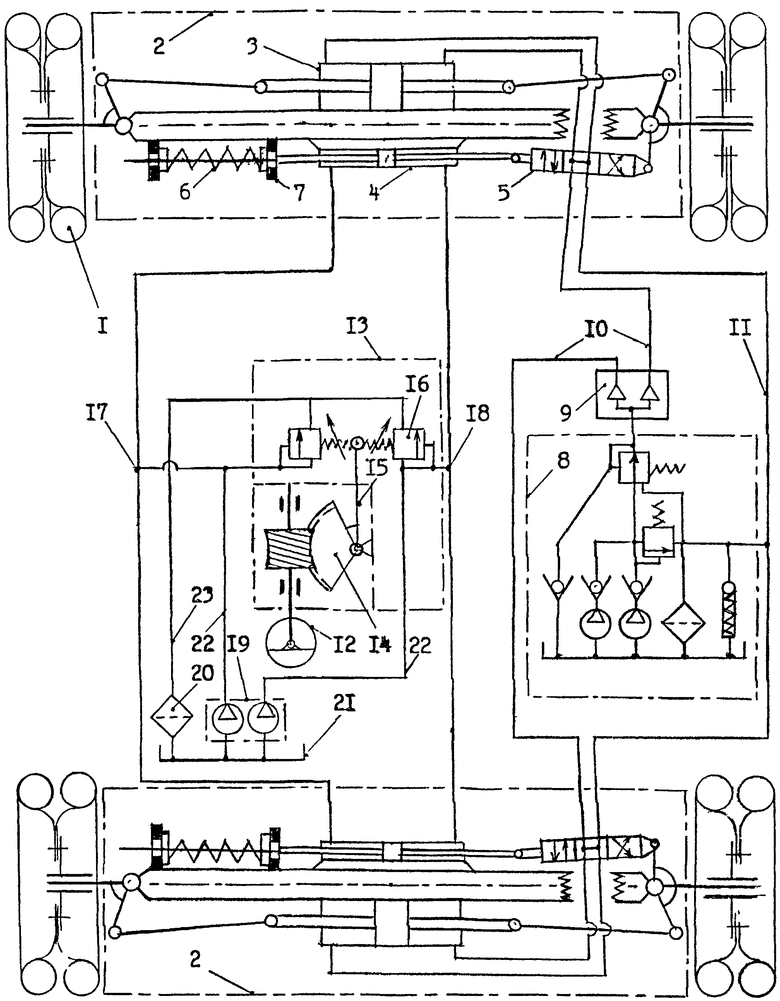
1. Способ дистанционного гидравлического управления поворотом транспортного средства, по которому создают сигнал поворота транспортного средства вращением руля, преобразуют этот сигнал в поток масла от насоса, соответствующий углу поворота руля, и направляют поток масла по управляющим маслопроводам к гидроцилиндру, которым поворачивают исполнительное устройство поворота транспортного средства соответственно повороту руля, отличающийся тем, что сигнал поворота, созданный вращением руля, преобразуют в давление потока масла в дистанционных управляющих маслопроводах, однозначно соответствующее углу поворота руля от позиции, соответствующей прямолинейному движению транспортного средства, причем этим давлением после достижения им расчетной величины в конце свободного хода руля сжимают пороговую пружину и соответственно величине сжатия пороговой пружины перемещают золотник гидрораспределителя, сообщенного гидравлически с гидроцилиндром исполнительного устройства поворота транспортного средства, который связан механически отрицательной обратной связью с гидрораспределителем.
2. Дистанционное рулевое управление самоходной машины, содержащее руль и преобразователь угла поворота руля в соответствующий поток масла к гидроцилиндру поворота направляющих колес, отличающееся тем, что содержит преобразователь угла поворота руля в давление потока масла, однозначно соответствующее каждому углу поворота руля от позиции, соответствующей прямолинейному движению самоходной машины, причем преобразователь включает регулируемые рулем через понижающую механическую передачу гидроклапаны давления масла в дистанционных управляющих маслопроводах, соединяющих насос с гидроцилиндром, имеющим возможность преобразовывать давления масла в соответственно однозначные перемещения штока, связанного кинематически с установленной между неподвижными упорами центрирующей пороговой пружиной и связанного кинематически с гидрораспределителем гидроусилителя поворота направляющих колес, причем управляющие каналы гидрораспределителя сообщены с гидроцилиндром поворота направляющих колес, связанным механически с гидрораспределителем отрицательной обратной связью.
| СПОСОБ ГИДРОУСИЛЕНИЯ ДИСТАНЦИОННОГО РУЛЕВОГО УПРАВЛЕНИЯ И СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420421C2 |
| US 2008142291 A1, 19.06.2008 | |||
| US 5947228 A, 07.09.1999 | |||
| Система рулевого управления транспортного средства | 1986 |
|
SU1310276A1 |

