Изобретение относится к рулевым системам ручного и автоматического вождения агромобильных агрегатов транспортного средства с технологическими сельхозмашинами.
Известны рулевые системы ручного и автоматического вождения агромобильного агрегата, содержащие гидроруль, не имеющий позиции открытого центра: рулевая система автоматического вождения трактора с шарнирно-соединенными полурамами (STJ 1598895); рулевая система самоходной свеклоуборочной машины типа КС-6Б [1] с. 67, рис. 45 (SU 247674), с. 70, 71, рис. 47 (SU 743611); рулевая система агрегата в составе передней ботво- и задней корнесвеклоуборочной машины + трактор ЛТ3-155 с системой вождения передними и задними управляемыми колесами (SU 1685283). Передними колесами трактора ЛТ3-155 управляли автопилотом, выносным на переднюю ботвоуборочную машину (фото приложено). Эта система в 90-х годах успешно прошла госиспытания на УкрНИИПИТ (п.г.т. Дослiдне Киевской обл.).
Недостаток таких рулевых систем в том, что они не содержат функцию автоматического возвращения колес в позицию прямолинейного хода, если руль не удерживают руками. Недостаток еще в том, что гидрообъемным рулем накапливают ошибку между позицией прямолинейного хода колес и соответствующей позицией рулевого колеса. На наш взгляд, именно этими недостатками скорость применения таких систем ограничена 50 км/ч. Тракторы этого порога уже достигли. Так как объемный к.п.д. гидроагрегатов известных выносных автопилотов не равен единице, то постепенно накапливают ошибку между позицией копир-водителя и колесами транспортного средства. Эту ошибку (не замечая ее) водитель устраняет тем, что вручную направляет транспортное средство на прямой ход после каждого разворота в конце рабочего гона.
Известны также системы, содержащие гидроруль, имеющий позицию открытого центра, RU 2488508, RU 2464194. Такие рулевые системы содержат контуры автоматической поддержки прямолинейности хода колес. То есть колеса возвращают в позицию прямолинейного хода автоматически, если руль не удерживают руками.
Известна рулевая система агромобильного агрегата в составе транспортного средства и технологических сельхозмашин, содержащая рулевой механизм регулирования давления в сигнальных трубопроводах адекватно отклонению рулевого колеса от позиции прямолинейного хода, связанный с гидроцилиндрами механизмов поворота колес транспортного средства через контуры автоматической поддержки прямолинейности хода колес, например, система по RU 2488508, принятая за ближайший аналог.
Недостаток в том, что такая рулевая система не перспективна для вождения агромобильного агрегата без человека на борту на скоростях до 50 км/ч и более совместно с известными выносными автопилотами, содержащими гидрообъемный усилитель, накапливающий ошибку, так как его объемный к.п.д. меньше единицы.
Задачей и техническим результатом является изыскание рулевой системы, которой:
а) достигают точное автоматическое вождение выносными автопилотами передней и задней сельхозмашины агромобильного агрегата по рядкам пропашной культуры, причем сигналу от вращения руля создают приоритет перед сигналом от автопилотов;
б) постоянно сохраняют однозначность между отклонением от соответствующей прямолинейному ходу начальной позиции руля (или копир-водителя выносного автопилота) и теоретическим радиусом поворота агрегата, причем в пределах зоны нечувствительности следящей системы ошибка возможна, но ее не накапливают;
в) колеса и руль возвращают в позицию прямолинейного хода автоматически, если руль не удерживают руками;
г) если руль удерживают отклоненным от позиции прямолинейного хода, то сигналами автопилота колеса поворачивают вправо-влево от позиции, заданной рулем;
д) если в транспортной позиции управляет водитель, то при переводе сельхозмашины в эту позицию копир-водитель автопилота автоматически фиксируют неподвижно.
Сущность изобретения в том, что рулевая система агромобильного агрегата в составе транспортного средства и технологических сельхозмашин, содержащая рулевой механизм регулирования давления в сигнальных трубопроводах адекватно отклонению рулевого колеса от позиции прямолинейного хода, связанный с гидроцилиндрами механизмов поворота колес транспортного средства через контуры автоматической поддержки прямолинейности хода колес, в соответствии с изобретением содержит выносные на технологические сельхозмашины автопилоты с копир-водителями и клапанами регулирования давления в сигнальных трубопроводах адекватно отклонению копир-водителей от позиции прямолинейного хода, причем автопилоты связаны с гидроцилиндрами механизмов поворота колес транспортного средства через те же самые контуры автоматической поддержки прямолинейности хода колес, что и рулевой механизм, причем и рулевой механизм, и автопилоты сообщены с контурами автоматической поддержки прямолинейности хода колес сигнальными трубопроводами через логические клапаны «ИЛИ».
Благодаря этому получают рулевую систему, соответствующую техническому результату по п.п. а), б), в), г), д), пригодную для скоростей до и более 50 км/ч.
Устроена рулевая система агромобильного агрегата (далее агрегата) в составе транспортного средства (далее шасси) и сельхозмашин, например, следующим образом.
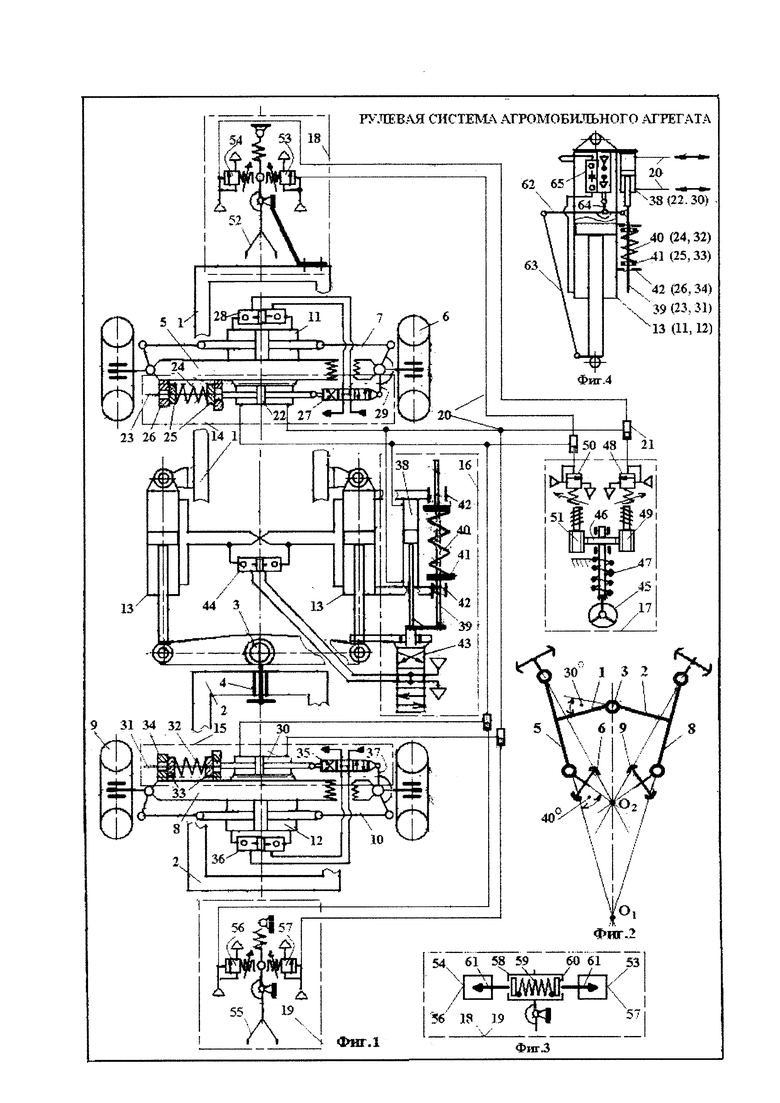
На фиг. 1 - схема рулевой системы агрегата для шасси с поворотными относительно балки моста колесами и с поворотными полурамами вокруг вертикальных шарниров.
На фиг. 2 - позиция управляемых колес и полурам на крутом повороте шасси.
На фиг. 3 - схема установки связанной кинематически с копир-водителем регулирующей пружины, поджатой на заданное пороговое усилие, между запорными элементами клапанов давления непрямого действия.
На фиг. 4 - вариант компактного модуля контура автоматической поддержки прямолинейности хода колес и гидроцилиндра механизма поворота колес в сборе.
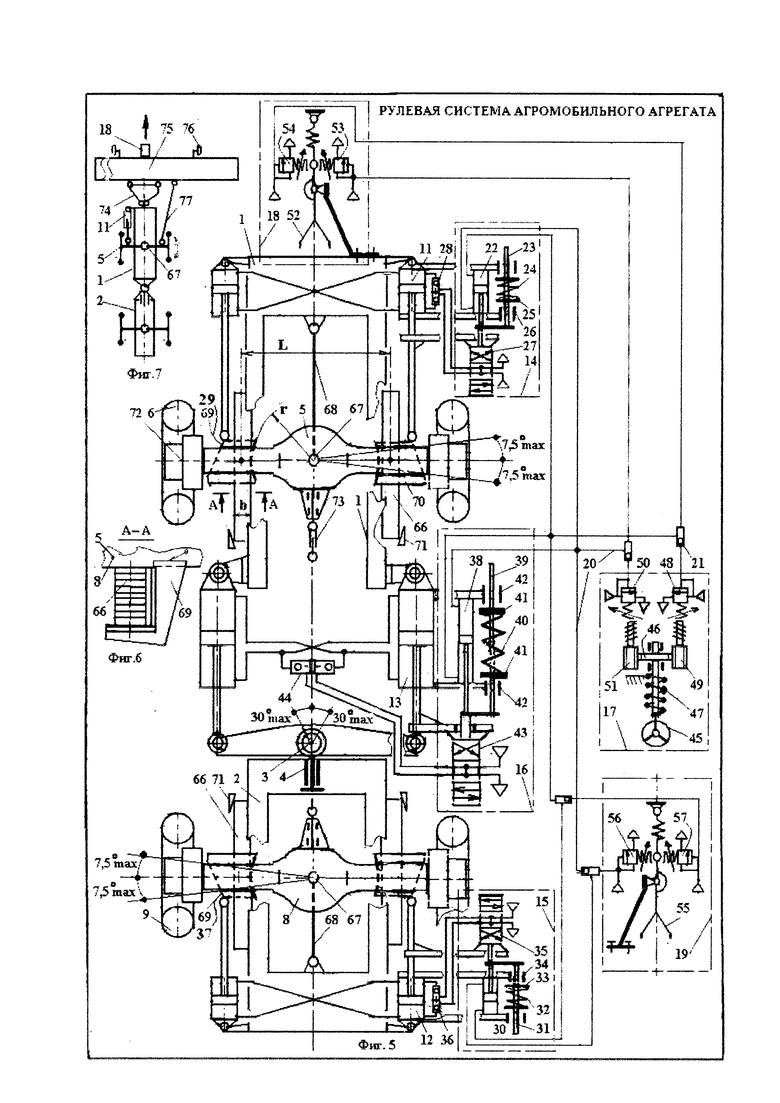
На фиг. 5 - схема рулевой системы агрегата для шасси с поворотными и мостами, и полурамами вокруг вертикальных шарниров.
На фиг. 6 - разрез по А-А на фиг. 5, на фиг. 9.
На фиг. 7 - схема связи передней машины с передним поворотным мостом шасси.
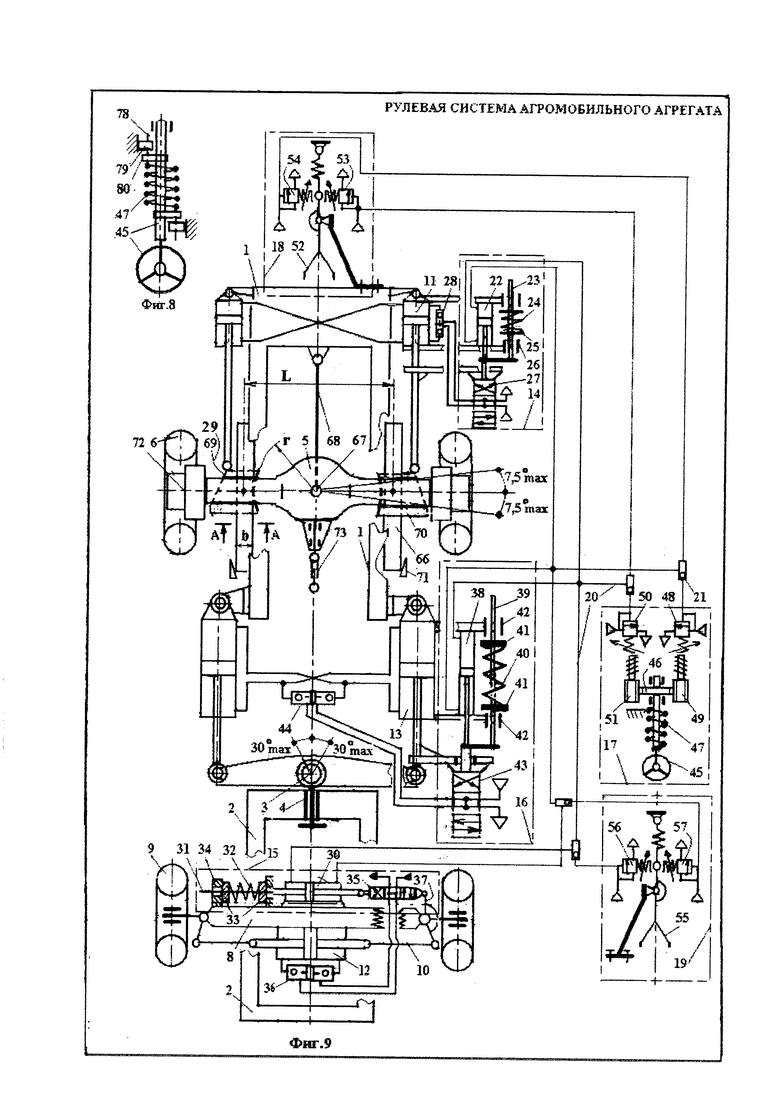
На фиг. 8 - на валу рулевого колеса схема центрирующей пружины, закрученной на пороговое усилие между неподвижными и подвижными упорами ее зацепов.
На фиг. 9 - схема рулевой системы агрегата для шасси с поворотным передним мостом, поворотными задними колесами относительно балки моста и поворотными полурамами.
Условные обозначения на фиг. 1…9 (сигнальные трубопроводы изображены тонкими линиями, силовые трубопроводы изображены основными линиями и без номера):
1 - передняя полурама шасси (далее рама),
2 - задняя полурама шасси (далее рама),
3 - вертикальный шарнир соединения рам 1 и 2 (далее шарнир),
4 - продольный горизонтальный шарнир соединения рам 1 и 2 (далее шарнир),
5 - мост передних колес, причем ось ведущей конической шестерни главной передачи лежит в продольно вертикальной плоскости симметрии трактора, (далее мост),
6 - правое, левое колесо моста 5 (далее колесо).
7 - тяга рулевой трапеции моста 5 (далее тяга),
8 - мост задних колес, причем ось ведущей конической шестерни главной передачи лежит в продольно вертикальной плоскости симметрии трактора, (далее мост),
9 - правое, левое колесо моста 8 (далее колесо),
10 - тяга рулевой трапеции моста 8 (далее тяга),
11 - со сферическими шарнирами гидроцилиндр механизма поворота колес 6 относительно балки моста 5 или поворота моста 5 относительно рамы 1 (далее цилиндр),
12 - со сферическими шарнирами гидроцилиндр механизма поворота колес 9 относительно балки моста 8 или поворота моста 8 относительно рамы 2 (далее цилиндр),
13 - гидроцилиндр механизма поворота рам 1, 2 с колесами 6, 9 (далее цилиндр),
14 - контур автоматической поддержки прямолинейности хода колес 6, связывающий управляющие каналы гидроруля с цилиндром 11, (далее контур),
15 - контур автоматической поддержки прямолинейности хода колес 9, связывающий управляющие каналы гидроруля с цилиндром 12, (далее контур),
16 - контур автоматической поддержки соосности рам 1, 2, связывающий управляющие каналы гидроруля с цилиндрами 13, (далее контур),
17 - рулевой механизм регулирования давления в сигнальных трубопроводах адекватно отклонению рулевого колеса от позиции прямолинейного хода, связанный с цилиндром 11 через контур 14, связанный с цилиндром 12 через контур 15, связанный с цилиндрами 13 через контур 16, (далее гидроруль),
18 - передний выносной автопилот в сборе на отдельной рамке, прикрепляемой к передней сельхозмашине или к переднему брусу рамы 1, (далее автопилот),
19 - задний выносной автопилот в сборе на отдельной рамке, прикрепляемой к задней сельхозмашине или к заднему брусу рамы 2, (далее автопилот),
20 - сигнальный трубопровод, сообщающий управляющие каналы гидроруля 17, автопилота 18, 19 с сигнальным гидроцилиндром контура 14, 15, 16 через логические клапаны «ИЛИ» (далее сигналопровод),
21 - логический клапан «ИЛИ» (далее клапан),
22 - сигнальный гидроцилиндр контура 14 (далее цилиндр),
23 - стержень, с которым соединен шток цилиндра 22, (далее стержень),
24 - сжатая на небольшое пороговое усилие центрирующая пружина на стержне 23 между подвижными упорами (далее пружина),
25 - подвижный упор в виде диска с отверстием, посаженный по подвижной посадке на стержень 23 с упорным кольцом ГОСТ 13942-68 с внешней стороны, причем наружный диаметр диска не меньше наружного диаметра пружины 24, (далее упор),
26 - контура 14 неподвижный упор с отверстием, сквозь которое по подвижной посадке проходит стержень 23, (далее упор),
27 - гидрораспределитель типа ГА-31000 [2] с. 132, рис. 151, с отрицательным перекрытием золотника 0,5 мм, причем этот золотник соединен шарнирно со штоком цилиндра 22, причем корпус гидрораспределителя соединен шарнирно с рычагом, жестко соединенным с поворотной осью колеса 6, (далее распределитель),
28 - от распределителя 27 двусторонний гидрозамок цилиндра 11 (далее замок),
29 - рычаг, жестко соединенный с поворотной осью колеса 6, (далее рычаг),
30 - сигнальный гидроцилиндр контура 15 (далее цилиндр),
31 - стержень, который соединен со штоком цилиндра 30, (далее стержень),
32 - на стержне 31 между подвижными упорами центрирующая пружина, сжатая на большее пороговое усилие, чем пружина 24, (далее пружина),
33 - подвижный упор в виде диска с отверстием, посаженный по подвижной посадке на стержень 31 с упорным кольцом ГОСТ 13942-68 с внешней стороны, причем наружный диаметр диска не меньше наружного диаметра пружины 32, (далее упор),
34 - контура 15 неподвижный упор с отверстием, сквозь которое по подвижной посадке проходит стержень 31, (далее упор),
35 - гидрораспределитель типа ГА-31000 [2] с. 132, рис. 151, с отрицательным перекрытием золотника 0,5 мм, причем этот золотник соединен шарнирно со штоком цилиндра 30, причем корпус гидрораспределителя соединен шарнирно с рычагом, жестко соединенным с поворотной осью колеса 9, (далее распределитель),
36 - от распределителя 35 двусторонний гидрозамок цилиндра 12 (далее замок),
37 - рычаг, жестко соединенный с поворотной осью колеса 9, (далее рычаг),
38 - сигнальный гидроцилиндр контура 16 (далее цилиндр),
39 - стержень, с которым соединен шток цилиндра 38 (далее стержень),
40 - на стержне 39 между подвижными упорами центрирующая пружина, сжатая на большее пороговое усилие, чем пружина 32, (далее пружина),
41 - подвижный упор в виде диска с отверстием, посаженный по подвижной посадке на стержень 39 с упорным кольцом ГОСТ 13942-68 с внешней стороны, причем наружный диаметр диска не меньше наружного диаметра пружины 40, (далее упор),
42 - прикрепленный к гильзе цилиндра 13 контура 16 неподвижный упор с отверстием, сквозь которое по подвижной посадке проходит стержень 39, (далее упор),
43 - гидрораспределитель типа ГА-31000 [2] с. 132, рис. 151, с отрицательным перекрытием золотника 0,5 мм, причем этот золотник соединен со штоком цилиндра 38, а корпус гидрораспределителя прикреплен к кронштейну, жестко соединенному со штоком цилиндра 13, (далее распределитель),
44 - от распределителя 43 двусторонний гидрозамок цилиндров 13 (далее замок),
45 - гидроруля 17 рулевое колесо с валом в подшипниках и с ведущей шестерней на другом конце вала (далее руль),
46 - ведущая шестерня на конце вала руля 45 (далее шестерня),
47 - центрирующая пружина кручения, закрученная на пороговое усилие между парой неподвижных упоров, прикрепленных к корпусу гидроруля 17, и парой подвижных упоров, закрепленных на валу руля 45, (далее пружина),
48 - правого поворота шасси клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис. 4.52, 4.53 а), б), с. 177, рис. 4.54, 4.55 а), б), с. 178 первый и второй абзацы сверху, (далее клапан),
49 - клапана 48 регулировочный винт с левой трапецеидальной резьбой, причем головка винта - шестерня с длинными зубьями в зацеплении с шестерней 46, (далее винт),
50 - левого поворота шасси клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис. 4.52, 4.53 а), б), с. 177, рис. 4.524, 4.55 а), б), с. 178 первый абзац, (далее клапан),
51 - клапана 50 регулировочный винт с правой трапецеидальной резьбой, причем головка винта - шестерня с длинными зубьями в зацеплении с шестерней 46, (далее винт),
52 - автопилота 18 ведущий копир-водитель с подпружиненными к почве щупами типа SU 247674 и с центрирующей пружиной, причем в щупы вмонтированы чувствительные элементы (пусть магнитотранзисторы) магнитного следа, созданного внесением сеялкой в пару рядков вместе с семенами свеклы гранул магнетита (æ = 8,8…25 ед. СИ), якобсита (æ = 250 ед. СИ), причем чувствительные элементы связаны с блоком усиления сигнала и ведения копир-водителя по магнитному следу, причем на уборке сахарной свеклы блок усиления сигнала не включают, а копир-водитель наводят контактом щупов с рядками свеклы, (далее копир-водитель),
53 - левого поворота колес 6 клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис. 4.52, 4.53 а), б), с. 177, рис. 4.524, 4.55 а), б), с. 178 первый абзац, но вместо регулировочного винта установлен гладкий стержень, связанный кинематически с копир-водителем 52, (далее клапан),
54 - правого поворота колес 6 клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис. 4.52, 4.53 а), б), с. 177, рис. 4.524, 4.55 а), б), с. 178 первый абзац, но вместо регулировочного винта установлен гладкий стержень, связанный кинематически с копир-водителем 52, (далее клапан),
55 - автопилота 19 ведомый копир-водитель с подпружиненными к почве щупами типа SU 247674 и с центрирующей пружиной, причем в щупы копир-водителя вмонтированы чувствительные элементы (пусть магнитотранзисторы) магнитного следа, созданного внесением сеялкой в пару рядков вместе с семенами свеклы гранул магнетита (æ = 8,8…25 ед. СИ), якобсита (æ = 250 ед. СИ), причем чувствительные элементы связаны с блоком усиления сигнала и ведения копир-водителя по магнитному следу, причем на уборке сахарной свеклы блок усиления сигнала не включают, а копир-водитель ведут контактом щупов с рядками свеклы, (далее копир-водитель),
56 - правого поворота колес 9 клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис. 4.52, 4.53 а), б), с. 177, рис. 4.524, 4.55 а), б), с. 178 1-й абзац, но вместо регулировочного винта установлен гладкий стержень, связанный кинематически с копир-водителем 55, (далее клапан),
57 - левого поворота колес 9 клапан в виде предохранительного клапана непрямого действия патронного исполнения типа 510.32.10 [3] с. 176, рис, 4.52, 4.53 а), б), с. 177, рис. 4.524, 4.55 а), б), с. 178 первый абзац, но вместо регулировочного винта установлен гладкий стержень, связанный кинематически с копир-водителем 55, (далее клапан),
58 - связанная кинематически с копир-водителем 52 (55) гильза с буртами на торцах и с сжатой на пороговое усилие пружиной между дисками внутри гильзы (далее гильза),
59 - сжатая на пороговое усилие регулирующая пружина внутри гильзы 58, причем в автопилоте 19 на большее пороговое усилие, чем в автопилоте 18, (далее пружина),
60 - диск, установленный между буртом гильзы 58 и пружиной 59, (далее диск),
61 - запорно-регулирующий элемент в виде конического клапана со стержнем, выходящим за габарит корпуса клапана 54, 53 (56, 57), установленный вместо штатных деталей: запорно-регулирующего элемента, пружины и регулировочного винта [3] с. 176, рис. 4.52, позиции 3, 5, 6, (далее запорный элемент),
62 - двуплечий рычаг с длиной плеч (пусть) 3 к 1, соединенный шарнирно: меньшим плечом - со стержнем 39, (23, 31); большим плечом через тягу - со штоком цилиндра 13, (11, 12); средним шарниром через другую тягу - с золотником гидрораспределителя, выполненного в общем корпусе с двусторонним гидрозамком; (далее коромысло),
63 - с шарнирами на концах тяга кинематического соединения коромысла 62 со штоком цилиндра 13, (11, 12) (далее тяга),
64 - с шарнирами на концах тяга кинематического соединения среднего шарнира коромысла 62 с золотником гидрораспределителя, выполненного в общем корпусе с двусторонним гидрозамком, (далее тяга),
65 - гидрораспределитель типа распределителя 43, (27, 35), но с двусторонним гидрозамком 44, (28, 36) в общем корпусе; в другом варианте гидрораспределитель двухкаскадный, у которого первый каскад в виде двухщелевого дросселирующего гидрораспределителя типа сопло - заслонка [4] с. 34…38, рис. 20; при этом цилиндр 38, (22, 30), стержень 39, (23, 31), пружина 40, (25, 33) выполнены миниатюрными и в герметичном корпусе; (далее распределитель).
66 - правая - левая рессора, листы которой шириной b с верхней и нижней накладками стянуты хомутами и центровой заклепкой «впотай», расстояние между осями центровых заклепок равно L, концы коренных листов установлены в приклепанных к раме 1 (2) кронштейнах, рессоры снабжены амортизаторами или системой гидропневматической подвески [5] с. 192, рис. 152, причем балка моста 5 (8) соединена с рессорами подвижно по радиусу r посредством приваренных к балке моста подвесов, (далее рессора),
67 - вертикальная ось шарнира, расположенного между рессорами 66 на линии пересечения вертикальной плоскости по оси моста 5 (8) с вертикальной плоскостью по оси ведущей конической шестерни главной передачи, причем шарнир выполнен в виде приваренного снизу к балке моста 5 (8) стержня со сферическим подшипником ГОСТ 3635-78 от реактивной тяги, (далее шарнир),
68 - реактивная тяга между шарниром 67 моста 5 (8) и рамой 1 (2), причем на обоих концах реактивная тяга содержит сферические подшипники ГОСТ 3635-78, (далее тяга),
69 - приваренный к балке моста 5 (8) левый подвес к рессоре 66, причем цилиндрическая стенка подвеса вертикальна, касается внутренних кромок рессоры 66 и выполнена по формуле:  , где r - радиус дуги выпуклой поверхности цилиндрической стенки с центром на вертикальной оси шарнира 67, (далее подвес),
, где r - радиус дуги выпуклой поверхности цилиндрической стенки с центром на вертикальной оси шарнира 67, (далее подвес),
70 - приваренный к балке моста 5 (8) правый подвес к рессоре 2, причем правый подвес является зеркальным отражением левого, (далее подвес),
71 - установленный вертикально между рессорой 2 и стенкой кронштейна рамы 1 (2) клин, предназначенный для устранения зазора между цилиндрической поверхностью подвеса 69, (70) и внутренней боковой кромкой рессоры 2, зазора обусловленного штатными допусками на изготовление, (далее клин),
72 - колесный редуктор с тормозным барабаном и тормозом (далее редуктор),
73 - карданный вал с шарнирами равных угловых скоростей [6] с. 46, рис. 11.37 а) или по RU 2431065 (далее кардан),
74 - со сферическими наконечниками нижние тяги переднего навесного устройства шасси, причем задние наконечники этих тяг сдвинуты до соприкосновения и расположены симметрично продольно вертикальной плоскости симметрии шасси, (далее тяги),
75 - сельхозмашина, пусть пропашной культиватор, установленный перед шасси по его ходу и соединенный с ним тягами 74, (далее машина),
76 - машины 75 колесо, копирующее поверхность почвы на рабочем гоне и в транспортной позиции, (далее колесо),
77 - со сферическими наконечниками штанга, соединяющая поворотную вокруг шарнира 67 балку моста 5 с культиватором 75, (далее штанга).
78 - зацеп пружины 47 из прутка, отогнутого на диаметре пружины параллельно ее оси (далее зацеп),
79 - неподвижный упор, прикрепленный к корпусу гидроруля 17, (далее упор),
80 - подвижный упор, закрепленный на валу руля 45, (далее упор).
Рулевая система агрегата, включающего три варианта шасси с рамами 1, 2, соединенных шарнирами 3, 4, и до двух машин 75 (передней и/или задней), содержит гидроруль 17, контуры 14, 15, 16 автоматической поддержки прямолинейности хода колес, предпочтительно в виде компактных модулей (фиг. 4), а также установленные на машинах 75 выносные автопилоты 18, 19, которыми поворачивают колеса 6, 9, мосты 5, 8 цилиндрами 11, 12, 13 механизмов поворота.
Первый вариант (фиг. 2) содержит механизм поворота колес 6, 9 (пусть до ±40°) относительно балки моста 5, 8 (без наклонов шкворня и без схождения колес), и механизм поворота колес 6, 9 поворотом рам 1, 2 вокруг шарнира 3 (пусть до ±30°C). При этом все колеса обкатывают вокруг точки O2 с минимальными радиусами. Для сравнения: колеса трактора серии ХТ3-170221 обкатывают вокруг точки O1 с большими радиусами.
Второй вариант (фиг. 5) содержит механизм поворота осей колес 6, 9 (пусть до ±7,5°) совместно с балкой моста 5, 8 относительно рамы 1, 2 вокруг вертикальной оси перпендикулярной оси балки моста 5, 8; и механизм поворота колес 6, 9 поворотом рам 1, 2 вокруг шарнира 3 (пусть до ±30°).
Третий вариант (фиг. 9) содержит механизм поворота относительно рамы 1 осей колес 6 (пусть до ±7,5°) с балкой моста 5 вокруг вертикальной оси, перпендикулярной оси этой балки; механизм поворота колес 9 (пусть до ±40°) относительно балки моста 8; механизм поворота колес 6, 9 поворотом рам 1,2 вокруг шарнира 3 (пусть до ±30°).
Устройство механизмов поворота колес, контуров автоматической поддержки прямолинейности хода колес и выносных автопилотов раскрыто в соответствующих позициях условных обозначений, приведенных выше.
Работа. Пусть агромобильный агрегат в составе шасси и уборочной машины ведут по междурядьям сахарной свеклы рулевой системой вручную, направляя колеса шасси по междурядьям вращением руля 45. Пусть клапаны 48, 50 отрегулированы на давление в сигналопроводах по 0,5 МПа. При искривлении рядков свеклы вправо (влево) руль 45 чуть поворачивают вправо (влево). Этим закручивают пружину 47 на усилие больше порогового, шестерней 46 проворачивают винты 49 и 51 гидроруля 17, давление масла в соответствующем сигналопроводе 20 клапаном 50 (48) уменьшают, а клапаном 48 (50) увеличивают так, что цилиндром 22 сжимают пружину 24, смещают золотник распределителя 27, подают масло в цилиндр 11, которым поворачивают колеса 6 вправо (влево) на угол до 3°…5°, что для вождения по междурядьям вполне достаточно (по аналогии с самоходной машиной КС-6Б). При этом указанное выше давление масла в сигналопроводах 20 не достаточно для перемещения поршней цилиндров 30, 38, штоки которых удерживают неподвижно пружинами 32, 40, сжатыми на более высокие пороговые усилия, чем пружина 24. Для крутого разворота вправо (влево) в конце рабочего гона вращают руль 45 вправо (влево) до упора. Этим вначале поворачивают до упора вправо (влево) колеса 6 (относительно моста 5, фиг. 1, или с мостом 5 относительно рамы 1, фиг. 5), затем поворачивают до упора влево (вправо) колеса 9 (относительно моста 8, фиг. 1, или с мостом 8 относительно рамы 2, фиг. 5), затем поворачивают до упора вправо (влево) полурамы с колесами 6, 9. Перед окончанием крутого разворота руль 45 руками и/или пружиной 47 возвращают в позицию прямолинейного хода колес 6, 9 и агрегата в целом. Благодаря замкам 28, 36, 44 колеса 6, 9 сохраняют позицию прямолинейного хода на любых дорожных рытвинах и ухабах.
Однако при ручном вождении по междурядьям даже на скоростях до 5 км/ч оператор испытывает большую психомоторную нагрузку, быстро утомляется, допускает частые погрешности вождения и потери корнеплодов до 10…20%. Поэтому современные свеклоуборочные машины оснащены автопилотами вождения на рабочем гоне по междурядьям, а наша КС-6 - первая в мире серийная машина с автопилотированием.
Пусть агрегат, содержащий шасси, переднюю ботво- и заднюю корнесвеклоуборочную машину, ведут по междурядьям сахарной свеклы автопилотами 18 и 19 рулевой системы. Копир-водитель 52 направляют по оси междурядья контактом его щупов с растениями свеклы прилегающих рядков. Отклонение по любым причинам колес 6, 9 от середин междурядий вправо-влево приводит к отклонению машин и их рабочих органов вправо-влево относительно рядков свеклы. При этом щупы копир-водителя 52, 55 удерживают рядками свеклы по оси междурядья, а вертикальный шарнир копир-водителя 52, 55 отклоняют вправо-влево от середины междурядья вместе с машиной. Поэтому копир-водитель 52 отклоняют влево-вправо относительно машины на некоторый угол. Благодаря кинематической связи копир-водителя 52 с клапанами 53, 54 изменяют давление масла в сигналопроводах 20 и поворачивают колеса 6 влево-вправо аналогично вращению руля 45 влево-вправо. По мере приближения колес 6 к середине междурядий адекватно уменьшают угол отклонения копир-водителя 52, угол поворота колес 52. Поэтому переднюю машину на необходимую траекторию заводят без автоколебаний и плавно. Одновременно аналогично управляют колесами 9 посредством автопилота 19. Поэтому и заднюю машину на необходимую траекторию заводят без автоколебаний тоже плавно. При этом сигналы гидроруля 17 и автопилотов 18, 19 разводят по контурам 14, 15, 16 клапанами 21 корректно.
Итак:
а) достигают точное автоматическое вождение выносными автопилотами передней и задней сельхозмашины агромобильного агрегата по рядкам пропашной культуры, причем сигналу от вращения руля создают приоритет перед сигналом от автопилота;
б) постоянно сохраняют однозначность между отклонением от соответствующей прямолинейному ходу начальной позиции руля (или копир-водителя выносного автопилота) и теоретическим радиусом поворота агрегата;
в) колеса и руль агрегата автоматически возвращают в позицию прямолинейного хода, если руль не удерживают руками.
Дальнейшее развитие рулевой системы агрегата для автоматического разворота в конце рабочего гона возможно, на наш взгляд, оснащением ведущего и ведомого копир-водителей автопилотов датчиками радиодальномеров по местным ориентирам.
Источники информации
1. Справочник по эксплуатации свеклоуборочных комплексов / A.M. Мазуренко и др. К.: Урожай, 1984. - 128 с.
2. Гидравлические агрегаты тракторов и сельскохозяйственных машин. Часть 1. Каталог. ЦНИИТЭавтосельхозмаш. М.: 1989. - 137 с.
3. Васильченко В.А. Гидравлическое оборудование мобильных машин: Справочник - М.: Машиностроение, 1983. - 301 с.
4. Чупраков Ю.И. Гидропривод и средства гидроавтоматики. М.: Машиностроение, 1979. - 232 с.
5. Автомобиль: Основы конструкции. Учебник для вузов по специальности «Автомобиль и автомобильное хозяйство» / Н.Н. Вишняков и др. 2-е изд. перераб. и доп. - Л.: Машиностроение, 1986. - 304 с.
6. Справочник по муфтам / Под ред. Полякова B.C. 2-е изд. перераб. и доп. - Л.: Машиностроение, Ленинградское отделение, 1979. - 344 с.
Изобретение относится к области транспортного машиностроения. Рулевая система агромобильного агрегата в составе транспортного средства и технологических сельхозмашин содержит рулевой механизм, регулирующий давление в сигнальных трубопроводах адекватно отклонению рулевого колеса от позиции прямолинейного хода. Рулевой механизм связан с гидроцилиндрами механизмов поворота колес транспортного средства через контуры автоматической поддержки прямолинейности хода колес. Рулевая система содержит автопилоты с копир-водителями и клапанами регулирования давления в сигнальных трубопроводах, вынесенные на технологические сельхозмашины. Автопилоты связаны с гидроцилиндрами механизмов поворота колес транспортного средства через те же самые контуры автоматической поддержки прямолинейности хода колес, что и рулевой механизм. Рулевой механизм и автопилоты сообщены с контурами автоматической поддержки прямолинейности хода колес сигнальными трубопроводами через логические клапаны «ИЛИ». Достигается повышение точности управления агромобильным агрегатом. 9 ил.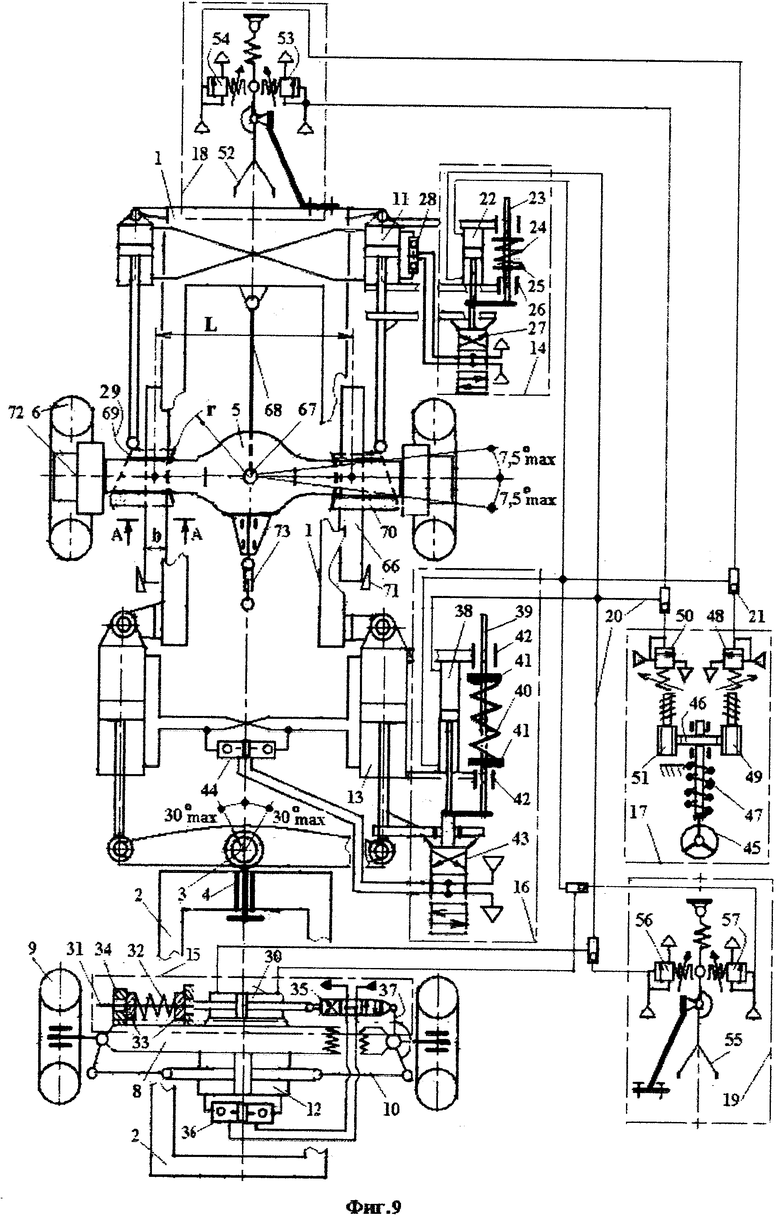
Рулевая система агромобильного агрегата в составе транспортного средства и технологических сельхозмашин (75), содержащая рулевой механизм (17) регулирования давления в сигнальных трубопроводах (20) адекватно отклонению рулевого колеса (45) от позиции прямолинейного хода, связанный с гидроцилиндрами (11, 12, 13) механизмов поворота колес (6, 9) транспортного средства через контуры (14, 15, 16) автоматической поддержки прямолинейности хода колес, отличающаяся тем, что содержит выносные на технологические сельхозмашины автопилоты (18, 19) с копир-водителями (52, 55) и клапанами (53, 54, 56, 57) регулирования давления в сигнальных трубопроводах адекватно отклонению копир-водителей от позиции прямолинейного хода, причем автопилоты связаны с гидроцилиндрами (11, 12, 13) механизмов поворота колес (6, 9) транспортного средства через те же самые контуры (14, 15, 16) автоматической поддержки прямолинейности хода колес, что и рулевой механизм, причем и рулевой механизм (17), и автопилоты (18, 19) сообщены с контурами (14, 15, 16) автоматической поддержки прямолинейности хода колес сигнальными трубопроводами (20) через логические клапаны «ИЛИ» (21).
| Гидравлическое рулевое управление транспортного средства | 1989 |
|
SU1613375A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ МОСТОВ САМОХОДНОЙ МАШИНЫ | 2011 |
|
RU2464194C1 |
| US 6550566 B1, 22.04.2003.. | |||

