Изобретение относится к областям измерительной техники и неразрушающего контроля и может быть применено для контроля параметров двухмерного напряженно-деформированного состояния трубопроводов, корпусов химических аппаратов, резервуаров для хранения газов и жидкостей, корпусов кораблей, деталей грузоподъемных машин и других ферромагнитных изделий в различных отраслях промышленности.
Известны способы определения механических напряжений в изделиях из ферромагнитных материалов, основанные на применении накладных преобразователей в виде двух взаимно перпендикулярных П-образных магнитопроводов. В способе, выбранном в качестве аналога, на контролируемое изделие устанавливают преобразователь, содержащий два взаимно перпендикулярных накладных электромагнита, один из которых намагничивающий, а другой измерительный (патент РФ №2131592 А1, МКИ G01L 1/12, Способ определения механических напряжений в изделиях из ферромагнитных материалов и устройство для его реализации / Фомичев С.К., Минаков С.Н., Недосека А.Я. и др., приоритет 05.11.1996).
На намагничивающий электромагнит подается намагничивающий сигнал с генератора синусоидального сигнала. Путем фазочувствительного измерения преобразованного сигнала с измерительного электромагнита фазочувствительным вольтметром определяется промежуточное значение измеряемой величины. Одновременно с фазочувствительным измерением определяется эффективное значение сигнала с измерительного электромагнита при помощи вольтметра переменного тока. Окончательное значение измеряемой величины, по которой судят о механических напряжениях в изделии, определяется в счетно-решающем блоке как положительное эффективное значение преобразованного сигнала, если промежуточное значение измеряемой величины положительно. В ином случае окончательное значение измеряемой величины в счетно-решающем блоке принимается равным отрицательному эффективному значению преобразованного сигнала.
Как известно, наиболее полную оценку сложного напряженно-деформированного состояния в точке материала дает тензор механических напряжений, через компоненты которого могут быть рассчитаны интенсивность напряжений, эквивалентные напряжения, главные напряжения, направления главных площадок и любые другие параметры, в том числе компоненты тензора деформаций (Горшков А.Г., Старовойтов Э.И., Тарлаковский Д.В. Теория упругости и пластичности: Учеб. для вузов. - М.: ФИЗМАТЛИТ, 2002). Недостатком способа-аналога и других подобных решений является то, что они обладают недостаточной информативностью, поскольку не позволяют определить отдельные компоненты тензора механических напряжений в контролируемой области материала. В связи с этим известные способы позволяют получить лишь некую интегральную характеристику напряженно-деформированного состояния материала.
В качестве прототипа выбран способ согласно авторскому свидетельству №1670437 (Авторское свидетельство СССР №1670437 A1, G01L 1/12. Способ определения интенсивности напряжения в изделиях из ферромагнитных материалов и устройство для его осуществления/Юрченко В.А., Минаков С.Н., приоритет 22.06.1989). В известном способе вначале для градуировки устанавливают преобразователь трансформаторного типа на эталонный образец, изготовленный из того же материала, что и контролируемое изделие, ориентируют его на образце, ступенчато нагружают в продольном направлении, намагничивают материал образца в зоне действия преобразователя в направлениях, составляющих угол 45° между собой, фиксируют его выходной сигнал, пропорциональный изменению намагниченности в направлениях, перпендикулярных направлениям намагничивания после каждой ступени нагружения, определяют градуировочный коэффициент. Далее устанавливают преобразователь на контролируемое изделие и производят намагничивание материала изделия в зоне действия преобразователя в направлениях, составляющих угол 45° между собой, причем намагничивание по направлениям осуществляют одновременно двумя переменными магнитными полями, различающимися по частоте и равными по напряженности. Фиксируют выходные сигналы, пропорциональные изменению намагниченности в направлениях, перпендикулярных направлениям намагничивания, и рассчитывают по этим сигналам величину интенсивности напряжений.
Изобретение по авторскому свидетельству №1670437 содержит следующие общие с заявляемым изобретением признаки: накладной преобразователь с намагничивающими и измерительными обмотками вначале для градуировки устанавливают на эталонный образец, изготовленный из того же материала, что и контролируемое изделие, ориентируют его на образце, создают в образце направленный магнитный поток, ступенчато нагружают образец в продольном направлении, на каждой степени нагружения определяют выходной сигнал преобразователя, пропорциональный приращению нагрузки, рассчитывают градуировочный коэффициент, далее устанавливают преобразователь на контролируемое изделие, создают в изделии направленный магнитный поток, фиксируют выходные сигналы преобразователя, пропорциональные эксплуатационной нагрузке, вычисляют значения механических напряжений по формулам. Способ-прототип имеет тот же недостаток, что и способ-аналог - он не позволяет определить отдельные компоненты тензора напряжений.
Известно, что при трехмерном напряженно-деформированном состоянии изотропного ферромагнитного материала в каждой его точке связь между приращениями тензора относительной магнитной проницаемости и тензором механических напряжений может быть представлена в виде (Воронцов Г.В., Григорьян С.Г., Мартынов В.В. К теории чувствительности магнитоупругих преобразователей, Изв. вузов. Электромеханика, 1985, №12, с.41-47):

где [Δµ] - матрица, составленная из компонентов тензора магнитной проницаемости материала
λ, ν - параметры магнитоупругой чувствительности материала, определяемые экспериментальным путем;
Е - единичная матрица
[Δσ] - матрица, составленная из компонентов тензора механических напряжений
Jσ=σ11+σ22+0σ33.
При этом что приращение вектора индукции в точке ферромагнетика, обусловленное механическими напряжениями:
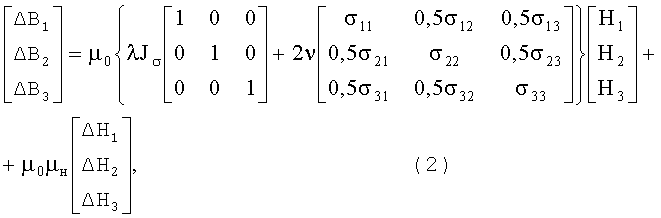
где Hi - проекции вектора начальной напряженности магнитного поля при отсутствии механических напряжений на координатные оси X1, X2, X3;
ΔBi и ΔBi - проекции векторов приращения индукции и приращения напряженности магнитного поля на координатные оси X1, X2, X3;
µ0 - магнитная постоянная;
µн - магнитная проницаемость материала при отсутствии механических напряжений.
Формула (2) дает хорошее совпадение результатов расчета с экспериментальными данными, что подтверждается результатами, приведенными в статьях: Григорьян С.Г., Воронцов Г.В. Об адекватности линейной модели магнитоупругой чувствительности ферромагнетиков, изотропных до нагружения, Изв. вузов. Электромеханика, 1988, №7, с.19-25; Григорьян С.Г. Магнитоупругий преобразователь давления с монолитным чувствительным элементом и его математическая модель, Изв. вузов. Электромеханика, 1988, №8, с.72-79.
При двухмерном напряженно-деформированном состоянии материала, если индукция и напряженность магнитного поля изменяются по гармоническому закону выражение (2) получает вид:
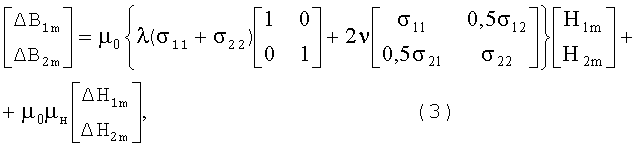
где ΔBim, Him, ΔHim - амплитудные значения приращения индукции, напряженности магнитного поля и приращения напряженности в точке материала.
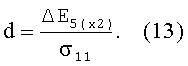
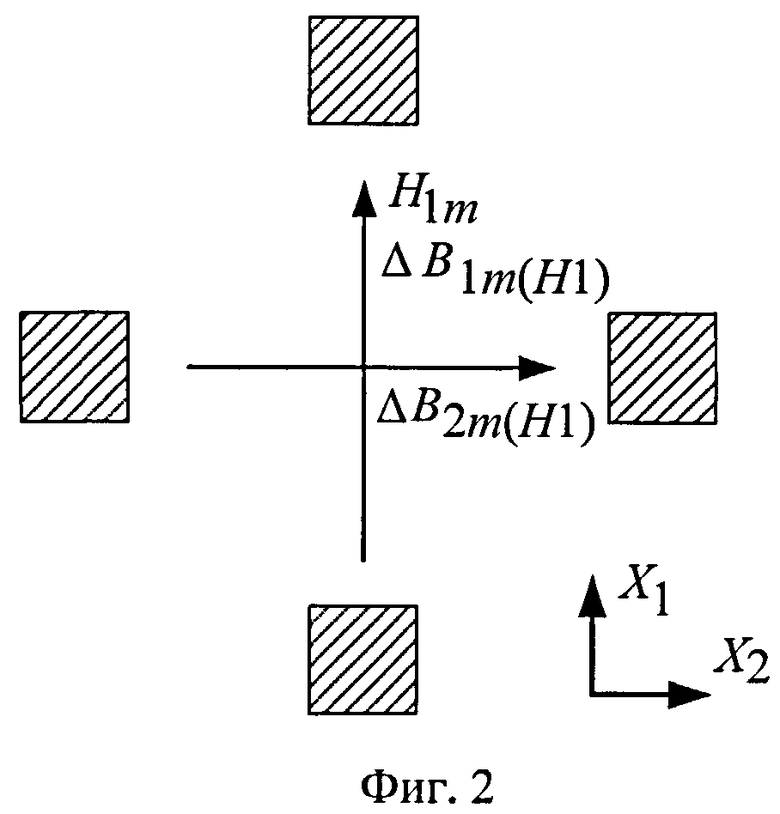
Выражение (3) позволяет по известным приращениям индукции ΔBim определить компоненты тензора механических напряжений в точке ферромагнетика. Данное выражение содержит три неизвестных: нормальные напряжения σ11, σ22 и касательные (сдвиговые) напряжения σ12=σ21. Для их раздельного определения необходимо иметь как минимум три уравнения, связывающих приращения индукции ΔB1m, ΔB2m с компонентами тензора напряжений. Чтобы получить эти уравнения в формуле (3) вначале полагаем, что магнитное поле направлено вдоль оси X1, (H2m=0), а затем вдоль оси X2 (H1m=0). Далее в индексах величин в скобках будем указывать направление магнитного поля, например: ΔB2m(Н1) - это приращение амплитудного значения индукции вдоль оси X2 в случае, когда магнитное поле направлено вдоль оси X1.
С учетом этого из выражения (3) при H2m=0 находим:

При H 1m=0 получим:

Выражения (4) и (5) составляют теоретическую основу предлагаемого способа и позволяют по приращениям индукции ΔB1m(Н1), ΔB2m(Н1), ΔB1m(Н2), ΔB2m(Н2) рассчитать компоненты тензора механических напряжений. Неизвестные параметры λ, ν, µн, Him, ΔHim входят в градуировочные коэффициенты, которые определяются экспериментально в процессе градуировки преобразователя механических напряжений на образце, изготовленном из того же материала, что и контролируемое изделие.
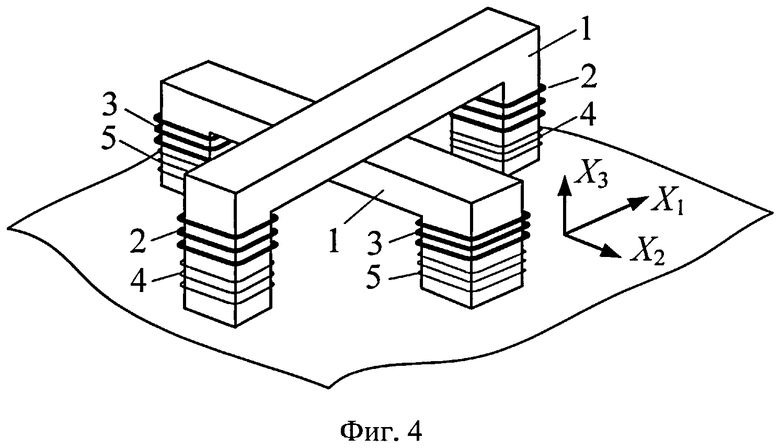
На фиг.1 показана конструкция накладного преобразователя механических напряжений, на фиг.2 и 3 - направления векторов Him и ΔBim в контролируемом изделии между проекциями полюсов преобразователя. На фиг.4 показана реализация предлагаемого способа с помощью накладного преобразователя, выполненного в виде двух взаимно перпендикулярных П-образных магнитопроводов.
Предлагаемый способ определения механических напряжений может быть реализован с помощью накладного преобразователя, для которого изделие выступает в роли участка магнитной цепи (фиг.1). Преобразователь имеет четырехполюсный крестообразный магнитопровод 1 из материала с высокой магнитной проницаемостью, например, феррита. На полюсах магнитопровода 1 располагаются намагничивающие обмотки 2, 3 и измерительные обмотки 4, 5. Секции обмотки 2, расположенные на противоположных полюсах магнитопровода 1, включены согласно. Аналогично включены секции обмоток 3-5. При подключении намагничивающей обмотки 2 к источнику переменного тока в изделии создается магнитное поле, направленное вдоль оси X1. Источник питания обеспечивает режим стабилизации амплитуды намагничивающего тока. С помощью намагничивающей обмотки 3 в изделии создается магнитное поле, направленное вдоль оси X2.
Под действием механических напряжений происходит изменение магнитного сопротивления изделия, сопровождающееся изменением магнитной индукции вдоль осей X1 и X2 (фиг.2, 3). Приращения индукции в изделии преобразуются в приращения ЭДС соответствующих измерительных обмоток. Например, при намагничивании вдоль оси X1 приращение ΔB1m(Н1) преобразуется в приращение ЭДС обмотки 4; приращение ΔB2m(Н1) - в приращение ЭДС обмотки 5. Приращения ЭДС измерительных обмоток представляют собой выходные сигналы преобразователя.
Формулы, связывающие приращения ЭДС измерительных обмоток 4 и 5 преобразователя с приращениями индукции ΔBim, имеют вид:
если магнитное поле направлено вдоль оси X1:


если магнитное поле направлено вдоль оси X2:


где ΔEi - эффективные значения приращений ЭДС измерительных обмоток 4 и 5; kк - коэффициент, учитывающий конструктивные факторы преобразователя; kк, kк - коэффициенты, учитывающие магнитные и магнитоупругие свойства материала изделия.
Здесь приращения ЭДС ΔE4(x1), ΔE5(x1), ΔE4(x2), ΔE5(x2) представляют собой выходные сигналы преобразователя, по которым во вторичной аппаратуре рассчитываются компоненты тензора механических напряжений.
Вводя обозначение
d=kкkν, из выражений (6)-(9) получим расчетные соотношения для определения компонентов тензора механических напряжений:



Здесь коэффициенты a, b, с, d определяются экспериментально в процессе градуировки конкретного преобразователя на образце, изготовленном из того же материала, что и контролируемое изделие. Формулы для расчета градуировочных коэффициентов а, b, с, d находим из условия, что в образце действуют только известные напряжения σ11. Из выражений (6) и (9) при σ22=0 находим:
Предлагаемый способ определения компонентов тензора механических напряжений состоит в следующем. Вначале проводят градуировку преобразователя на образце с постоянным поперечным сечением, изготовленном из материала изделия (например, трубопровода). Образец устанавливают на специальном стенде, позволяющем осуществлять его одноосное растяжение. Преобразователь ориентируют так, чтобы ось X1 была направлена вдоль образца (оси усилия), то есть в образце создаются только напряжения σ11. Значение σ11 находят путем деления усилия на поперечное сечение образца.
С помощью обмотки 2 магнитное поле прикладывают вдоль оси X1 и производят ступенчатое нагружение образца известными усилиями, измеряя значения ЭДС обмотки 4. Вычитая из измеренных величин начальное значение ЭДС при σ11=0, на каждой ступени нагружения находят приращение ΔE4(x1). Далее, не перемещая преобразователь, с помощью обмотки 3 магнитное поле прикладывают вдоль оси X2 и аналогично получают значения ΔE5(x2). Проводят линейную аппроксимацию зависимостей ΔE4(x1), ΔE5(x2) от σ11 и по формулам (13) рассчитывают значения градуировочных коэффициентов а, b, c, d.
После этого устанавливают преобразователь на поверхность контролируемого изделия и измеряют начальные значения ЭДС обмоток 4, 5 при отсутствии эксплуатационной нагрузки при намагничивании вдоль оси X1, а потом вдоль оси X2. Далее, не изменяя положения преобразователя, таким же образом измеряют ЭДС обмоток 4, 5 при двух направлениях намагничивания при наличии эксплуатационной нагрузки. Вычисляют приращения ЭДС ΔE4(x1), ΔE4(x2), ΔE5(x1), ΔE5(x2) и по формулам (10)-(12) находят компоненты σ11, σ22, σ12=σ21 тензора механических напряжений. По компонентам тензора напряжений могут быть рассчитаны любые другие параметры напряженно-деформированного состояния, в том числе характеризующие деформации изделия. В процессе градуировки и измерения механических напряжений должны быть обеспечены стабильность амплитуды и формы тока питания намагничивающих обмоток преобразователя и постоянная ширина зазоров между полюсами преобразователя и изделием.
Чаще всего в качестве конструкционных материалов используют стальной прокат, который имеет более или менее выраженную текстуру, то есть анизотропию магнитных свойств. Чтобы снизить влияние анизотропии магнитных свойств, ориентация осей координат относительно направления прокатки должна быть одинаковой при установке преобразователя на градуировочном образце и на контролируемом изделии. Для изначально изотропных материалов направления осей координат при определении механических напряжений в изделии выбираются произвольно.
Вариант накладного преобразователя, в котором используются два взаимно перпендикулярных П-образных магнитопровода, показан на фиг.4. На магнитопроводах 1 расположены намагничивающие обмотки 2, 3 и измерительные обмотки 4, 5. Влияние различной длины П-образных магнитопроводов 1 может устраняться, например, за счет различного числа витков намагничивающих обмоток 2 и 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2195636C2 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УПРУГИХ НАПРЯЖЕНИЙ В ФЕРРИТОВЫХ ИЗДЕЛИЯХ | 2000 |
|
RU2184371C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2189020C1 |
| Способ определения статических магнитных характеристик материала и устройство для его осуществления | 1980 |
|
SU920598A1 |
| Устройство для измерения динамических магнитных характеристик | 1983 |
|
SU1093998A1 |
| Способ контроля физико-механических свойств изделий из ферромагнитных материалов | 1990 |
|
SU1826051A1 |
| Способ контроля остаточных механических напряжений в элементах конструкций | 1987 |
|
SU1411653A1 |
| Способ измерения характеристик взрыва заряда взрывчатого вещества в ближней зоне и устройство для его осуществления | 2017 |
|
RU2658080C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПРОНИЦАЕМОСТИ ЦИЛИНДРИЧЕСКИХ ФЕРРОМАГНИТНЫХ ПРОВОДНИКОВ | 2003 |
|
RU2255346C2 |
Изобретение относится к областям измерительной техники и неразрушающего контроля и предназначено для определения компонентов тензора механических напряжений в изделиях из ферромагнитных материалов при двухмерном напряженно-деформированном состоянии. Техническим результатом является расширение информативности контроля за счет определения отдельных компонентов тензора механических напряжений, вызванных эксплуатационной нагрузкой. Технический результат достигается благодаря тому, что в способе используется накладной трансформаторный преобразователь с намагничивающими и измерительными обмотками, для которого изделие выступает в роли участка магнитной цепи. В изделии создается магнитное поле, направленное вдоль оси X1, и определяются приращения сигналов измерительных обмоток, пропорциональные приращениям индукции вдоль осей X1 и Х2. Далее в изделии создается магнитное поле, направленное вдоль оси Х2, и вновь определяются приращения сигналов этих измерительных обмоток. Компоненты тензора напряжений рассчитываются по формулам. Предварительно выполняется градуировка преобразователя на образце, изготовленном из того же материала, что и контролируемое изделие. 4 ил.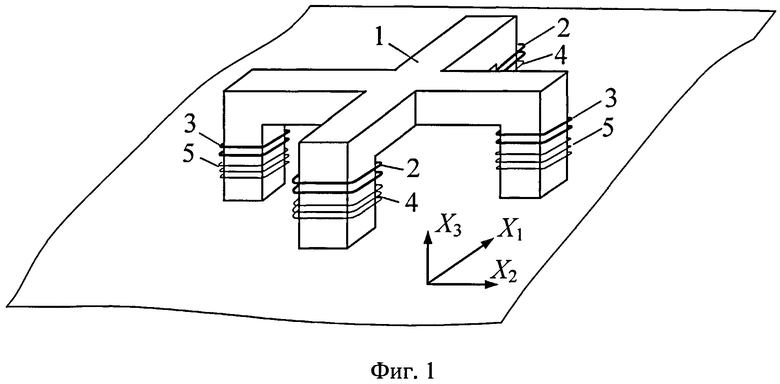
Способ определения механических напряжений в изделиях из ферромагнитных материалов, заключающийся в том, что накладной преобразователь с намагничивающими и измерительными обмотками вначале для градуировки устанавливают на эталонный образец, изготовленный из того же материала, что и контролируемое изделие, ориентируют его на образце, создают в образце направленный магнитный поток, ступенчато нагружают образец в продольном направлении, на каждой ступени нагружения определяют выходной сигнал преобразователя, пропорциональный приращению нагрузки, рассчитывают градуировочный коэффициент, далее устанавливают этот преобразователь на контролируемое изделие, создают в изделии направленный магнитный поток, фиксируют выходной сигнал преобразователя, пропорциональный эксплуатационной нагрузке, вычисляют значения механических напряжений, отличающийся тем, что питание намагничивающих обмоток преобразователя производят от источника тока, при градуировке намагничивают материал образца вдоль продольной оси X1 и определяют приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси X1, намагничивают материал образца по оси Х2 и определяют приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси Х2, рассчитывают градуировочные коэффициенты а, b, с, d по формулам
где ΔE4(x1) - приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси X1 при намагничивании по оси X1; ΔE5(x2) - приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси Х2 при намагничивании по оси Х2; σ11 - механические напряжения в образце; после этого устанавливают преобразователь на контролируемое изделие и намагничивают материал в направлении X1, а затем Х2, в каждом случае определяя приращения сигналов измерительных обмоток, пропорциональные приращениям индукции в материале по осям X1 и Х2 под действием эксплуатационной нагрузки, вычисляют компоненты тензора механических напряжений в изделии по формулам
σ11=аΔЕ4(х1)-bΔЕ5(х2);
σ22=aΔE5(x2)-bΔE4(x1);
σ12=ΔE5(x1)/c; σ21=ΔЕ4(х2)/c,
где ΔE4(х2) - приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси X1 при намагничивании по оси Х2; ΔE5(x1) - приращение сигнала измерительной обмотки, пропорциональное изменению индукции в материале по оси Х2 при намагничивании по оси X1.
| Способ определения интенсивности напряжения в изделиях из ферромагнитных материалов и устройство для его осуществления | 1989 |
|
SU1670437A1 |
| Видоизменение охарактеризованной в пат. № 11782 тепловой изоляции для трубопроводов, котлов и т.п. | 1930 |
|
SU20421A1 |
| Способ определения напряжений в элементах нагруженных конструкций | 1985 |
|
SU1569598A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В ИЗДЕЛИЯХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2131592C1 |
| US 20020157478 A1, 31.10.2002. | |||

