Изобретение относится к биосенсору с магнитными метками с квадрупольной магнитной системой управления.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Спрос на биосенсоры все больше возрастает в наши дни. Как правило, биосенсоры позволяют детектировать конкретные молекулы в аналите, в котором количество молекул обычно мало. Например, можно измерять количество лекарств или сердечных маркеров в слюне или крови. Поэтому используются частицы-мишени, например сверхпарамагнитные шарики-метки, которые специфически связываются только со специфическим связывающим участком или точкой, если детектируемые молекулы присутствуют в аналите. Одним из известных способов детектирования этих частиц-меток, связанных с точкой связывания, является нарушенное полное внутренне отражение (FTIR). В этом способе свет подается на образец под углом полного внутреннего отражения. Если вблизи поверхности образца отсутствуют частицы, свет полностью отражается. Однако если частицы-метки связались с поверхностью, то условие полного внутреннего отражения нарушается, часть света рассеивается в образце, и, таким образом, количество отраженного поверхностью света уменьшается. Измеряя интенсивность отраженного света оптическим детектором можно оценить количество частиц, связанных с поверхностью. Это позволяет оценить количество целевых специфических молекул, присутствующих в аналите или образце.
Эта технология, равно как и другие сенсоры с магнитными метками, в частности биосенсоры, критически зависит от магнитного притяжения шариков или магнитных меток, также называемого воздействием. Магнитное воздействие особенно важно для увеличения производительности (скорости) биосенсора для применения у постели больного. Направление магнитного воздействия может быть как в сторону поверхности или области сенсора, где производятся фактические измерения, так и от поверхности этого сенсора. В первом случае магнитное воздействие позволяет увеличить концентрацию магнитных частиц около поверхности сенсора, таким образом ускоряя процесс связывания магнитных частиц с поверхностью сенсора. Во втором случае частицы удаляются с поверхности, что называется магнитной очисткой. Магнитная очистка может заменить этап традиционной мокрой очистки. Она более тщательная и уменьшает количество операционных этапов.
В более сложных применениях, на маленькой поверхности может обеспечиваться несколько точек связывания. Далее может быть необходимым сначала накопить частицы или метки в первом связывающем участке, и после этапа очистки переместить магнитные метки ко второму связывающему участку. Такие приложения обеспечивают большую управляемость магнитного поля, генерируемого для приложения точных и предварительно определенных сил к магнитным частицам-меткам.
В WO 2008/107827 A1 раскрыта электромагнитная система для биосенсоров, причем система может быстро переключаться между сильными магнитными градиентами без необходимости перемещения механических элементов. Это реализовано посредством двух независимых элементных блоков, которые разделены в области полюсных наконечников зазором, в котором располагается объем образца с использованием картриджа и в котором сенсорные поверхности биосенсора расположены на одной или более внутренних поверхностей картриджа.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предоставление улучшенного биосенсора магнитных меток, который позволяет улучшить степень управления силами, действующими на магнитные частицы. Еще одной задачей настоящего изобретения является предоставление улучшенного биосенсора, который является более гибким и может быть использован для разных видов приложений.
Эти задачи достигаются посредством признаков, приведенных в формуле изобретения.
Настоящее изобретение предоставляет биосенсор, содержащий средство для размещения жидкого образца, имеющее сенсорную поверхность на его дне, и средство для детектирования частиц, аккумулированных на и/или вблизи сенсорной поверхности. Биосенсор дополнительно содержит квадрупольный магнитный блок, выполненный с возможностью обеспечения градиента магнитного поля на сенсорной поверхности, при этом блок расположен под сенсорной поверхностью.
Примером средства для размещения жидкого образца является ячейка с образцом в виде картриджа или камеры для образцов, которая выполнена с возможностью приема и содержания в себе жидкого образца. Ячейка с образцом может, например, быть картриджем или кюветой с сенсорной поверхностью на своем дне, которая находится в жидком контакте с объемом для образцов картриджа.
Любой детектор, пригодный для детектирования магнитных частиц, может быть использован в качестве средства для детектирования частиц, аккумулированных на и/или вблизи сенсорной поверхности. В предпочтительном варианте используется оптический детектор. В наиболее предпочтительном варианте осуществления биосенсора используется оптический детектор, основанный на нарушенном полном внутреннем отражении (FTIR).
В наиболее предпочтительном варианте осуществления настоящего изобретения квадрупольный магнитный блок содержит четыре независимо управляемых магнитных субблока. Квадрупольный магнитный блок может содержать, например, четыре электромагнитных катушки, которые независимо управляются посредством раздельного обеспечения электрического тока к упомянутым катушкам. Это позволяет генерировать специфические рисунки магнитного поля и/или градиента магнитного поля на сенсорной поверхности. Например, могут быть активированы только два или три магнитных субблока, в то время как остальные один или два могут оставаться нейтральными. Дополнительно или альтернативно, субблоки могут иметь различные направления намагниченности. Например, один субблок может обеспечивать магнитное поле, направленное вверх, в то время как другой субблок может обеспечивать магнитное поле, направленное вниз.
Таким образом, на сенсорной поверхности может быть обеспечено четко определенное и предопределенное магнитное поле и/или градиент магнитного поля для перемещения магнитных меток-частиц к определенным связывающим участкам или от них.
Если субблоки содержат электромагниты, то дополнительно возможно генерировать динамическое магнитное поле, например вращающееся магнитное поле.
В соответствии с предпочтительным вариантом осуществления квадрупольный магнитный блок содержит четыре электромагнитных катушки c сердечником, при этом сердечники четырех электромагнитных катушек имеют форму, выполненную с возможностью обеспечения сильного градиента магнитного поля на сенсорной поверхности. Это может быть достигнуто, например, путем обеспечения сердечника с острым концом вблизи сенсорной поверхности. Также предпочтительно, чтобы сердечники четырех электромагнитных катушек имели формы, выполненные с возможностью обеспечения сильного градиента магнитного поля в направлении, перпендикулярном к сенсорной поверхности. В особенности предпочтительно, чтобы сердечники четырех электромагнитных катушек имели форму, выполненную с возможностью обеспечения слабого градиента магнитного поля в направлении, параллельном к сенсорной поверхности. Это предпочтительно достигается посредством сердечников четырех электромагнитных катушек, каждый из которых имеет скошенный полюсный наконечник. Согласно предпочтительному варианту осуществления скос полюсного наконечника с сенсорной поверхностью имеет угол между 30° и 60°, предпочтительно между 40° и 60° и наиболее предпочтительно около 45°.
Согласно другому предпочтительному варианту осуществления настоящего изобретения квадрупольный магнитный блок является подвижным по отношению к сенсорной поверхности. В частности, предпочтительно, чтобы квадрупольный магнитный блок мог скользить параллельно сенсорной поверхности. Таким образом, возможно правильное выравнивание между связывающими участками на сенсорной поверхности и субблоками квадрупольного магнитного блока.
Также предпочтительно, чтобы квадрупольный магнитный блок был выполнен с возможностью обеспечения переключаемого градиента магнитного поля.
Сенсорная поверхность биосенсора предпочтительно содержит один или более связывающих участков, при этом один или более связывающих участков содержат реагент или комбинацию нескольких реагентов.
Биосенсор согласно настоящему изобретению является преимущественным по сравнению с известным уровнем техники, поскольку он предоставляет более верное и точное воздействие магнитных меток-частиц на сенсорную поверхность. Таким образом, могут быть достигнуты более сложные схемы воздействия, включая многоступенчатые воздействия на различные сенсорные участки на одной и той же сенсорной поверхности. Более того, могут быть достигнуты динамические эффекты посредством обеспечения вращающегося магнитного поля или высоко-переключаемого градиента. Это помогает, в частности, предотвратить формирование вертикальных или горизонтальных колонн суперпарамагнитных шариков.
Эти и другие аспекты изобретения будут очевидны из и объяснены со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает общий вид квадрупольного магнитного блока, который может быть использован в биосенсоре в соответствии с настоящим изобретением;
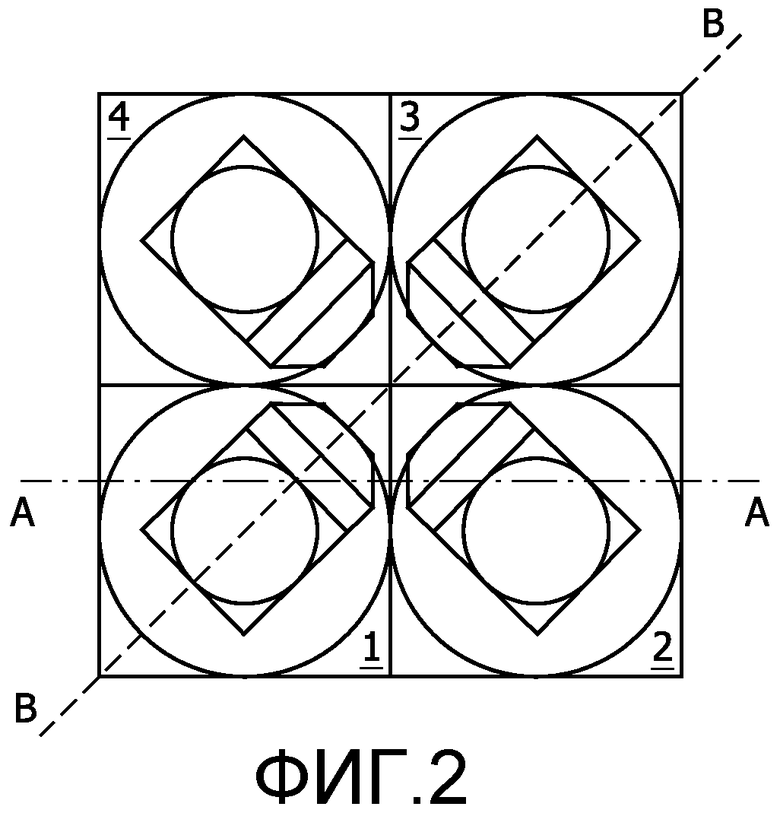
Фиг.2 изображает вид сверху квадрупольного магнитного блока, показанного на Фиг. 1;
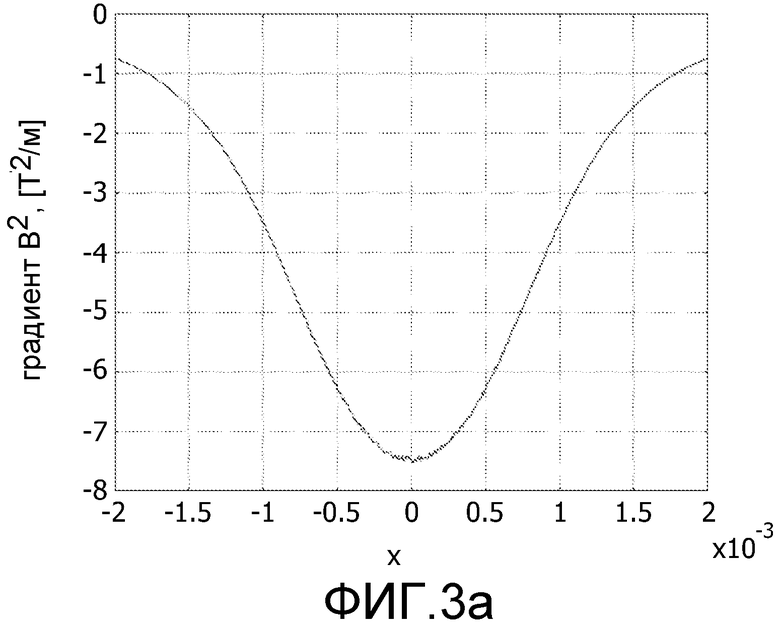
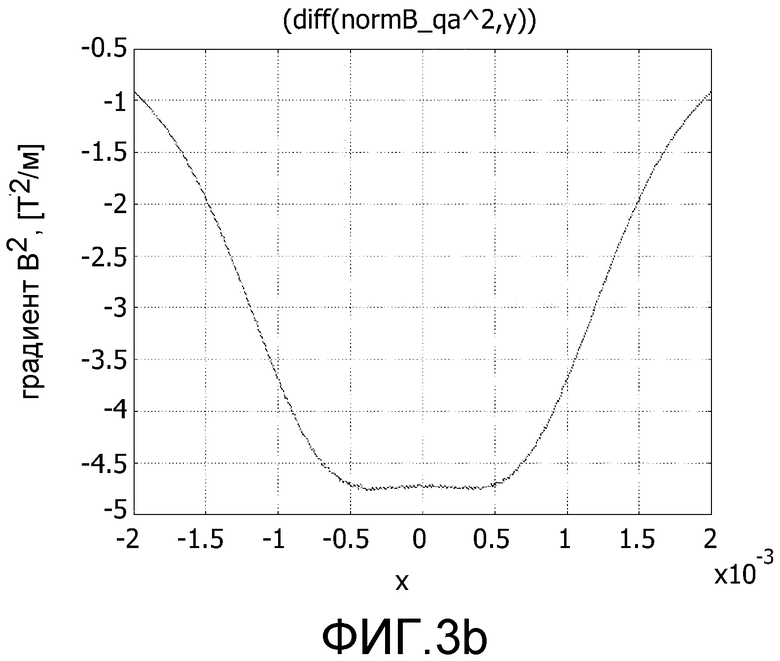
Фиг. 3a и 3b изображают примерные градиенты B2, которые могут быть получены при помощи квадрупольного магнитного блока, показанного на Фиг. 1 и 2;
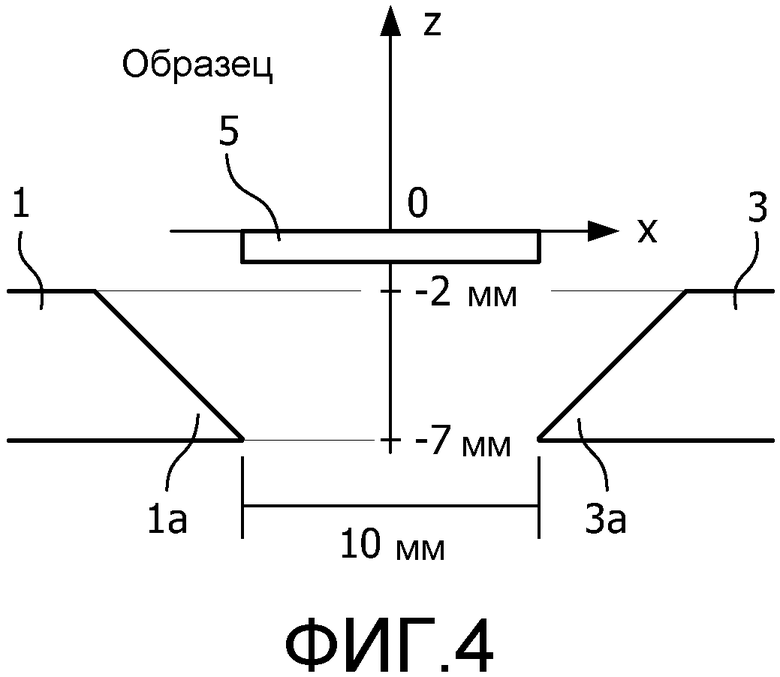
Фиг. 4 изображает вид в поперечном сечении квадрупольного магнитного блока, который может быть использован в биосенсоре в соответствии с настоящим изобретением;
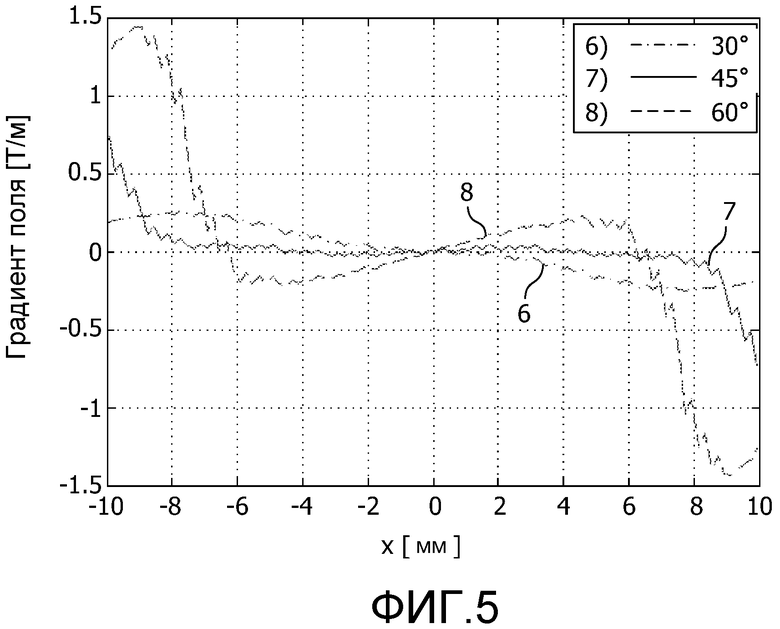
Фиг. 5 изображает диаграммы моделирования горизонтального градиента магнитного поля для различных скосов полевых наконечников квадрупольного магнитного блока, изображенного на Фиг. 4;
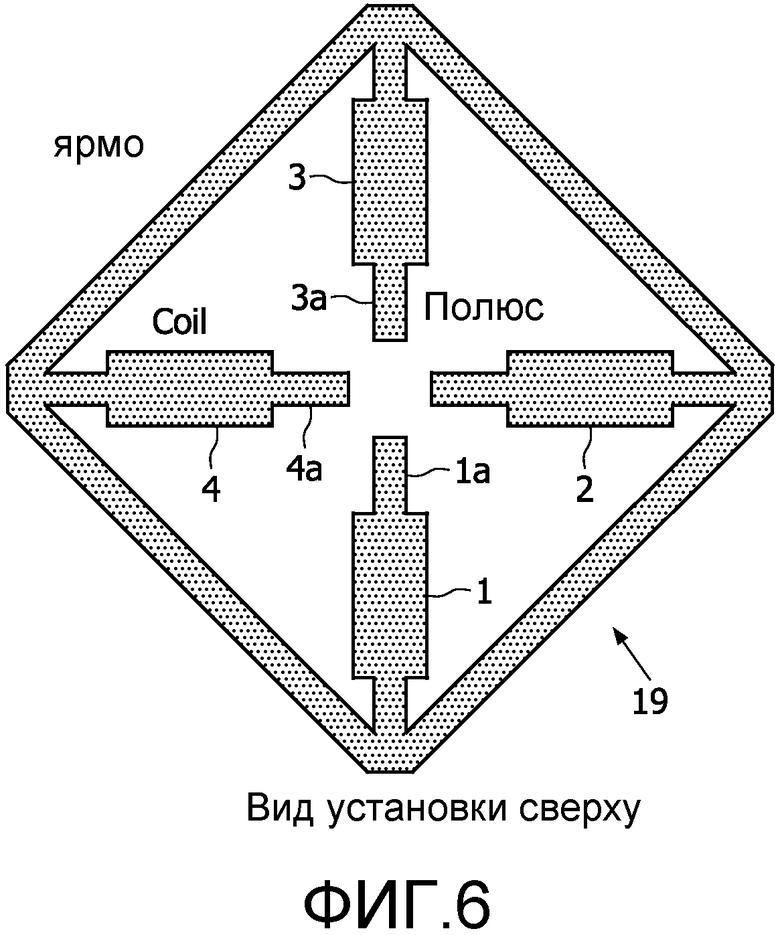
Фиг. 6 изображает вид сверху квадрупольного магнитного блока, изображенного на Фиг. 4;
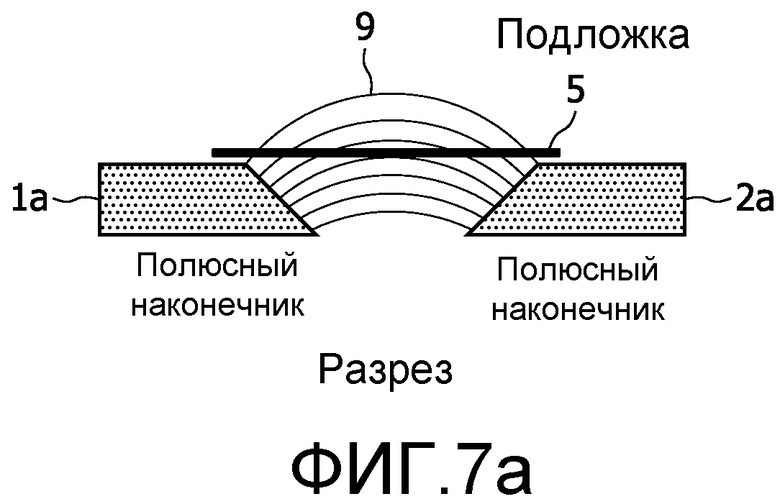
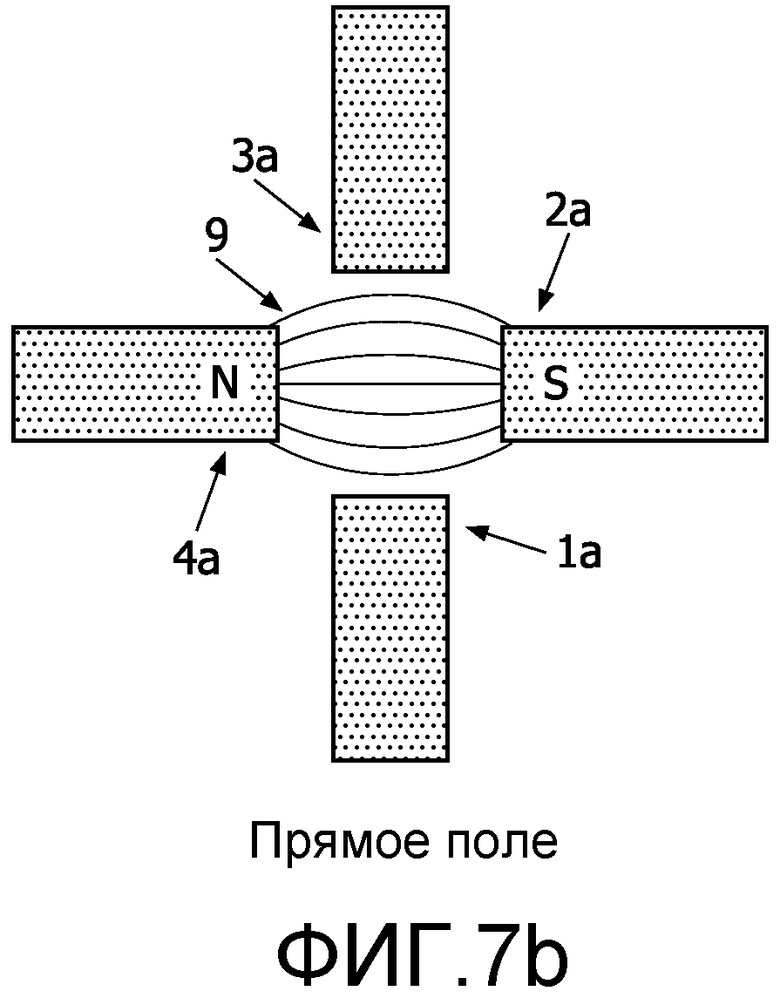
Фиг. 7a, 7b и 7c схематически изображают линии потока магнитного поля квадрупольного магнитного блока, показанного на Фиг. 4 и 6 - в поперечном сечении и вид сверху;
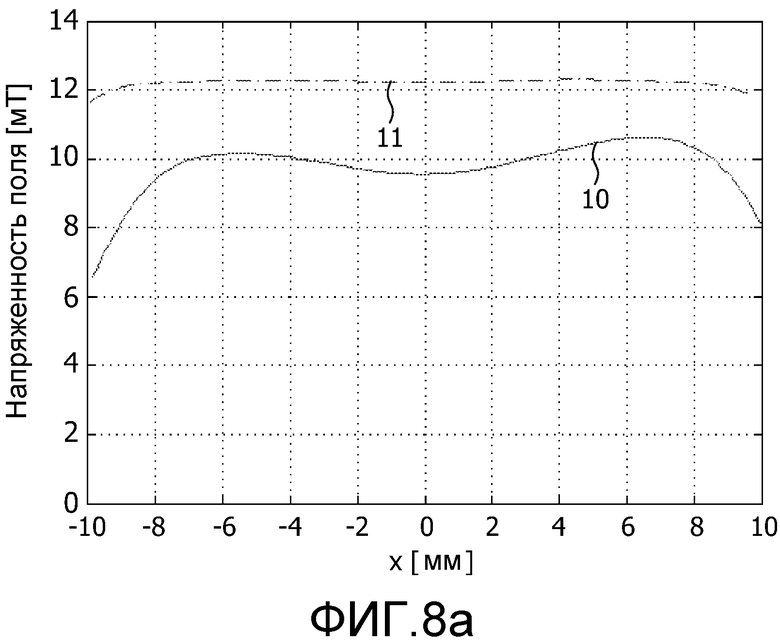
Фиг. 8a изображает диаграмму напряженности магнитного поля как функцию горизонтальной координаты;
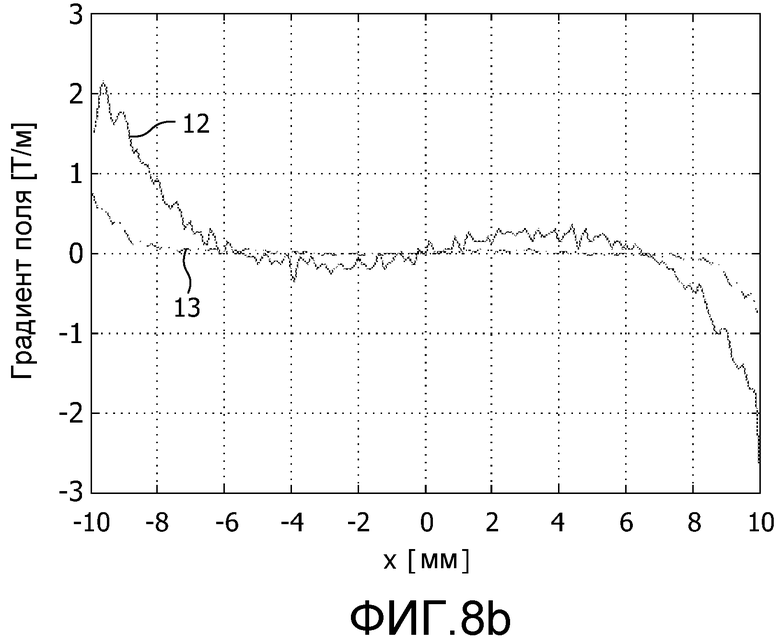
Фиг. 8b изображает диаграмму горизонтального градиента поля как функцию горизонтальной координаты;
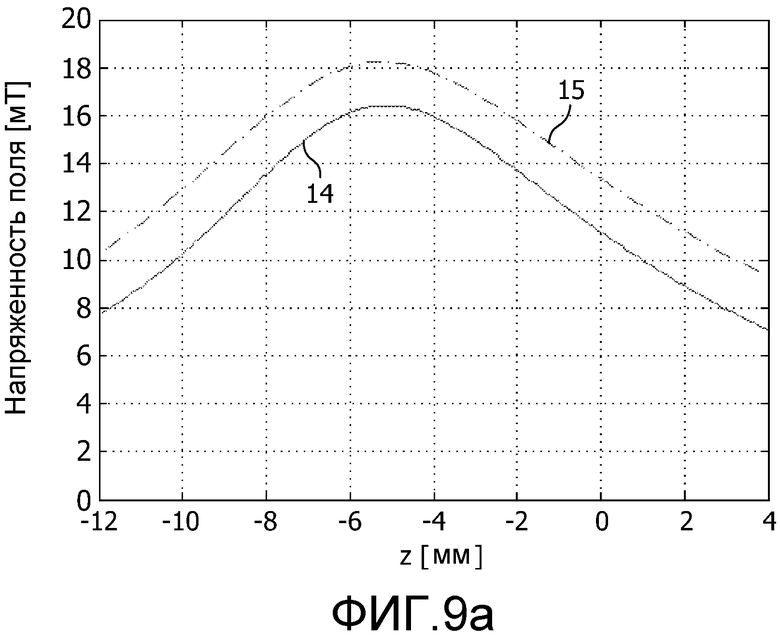
Фиг. 9a изображает диаграмму напряженности поля как функцию вертикальной координаты;
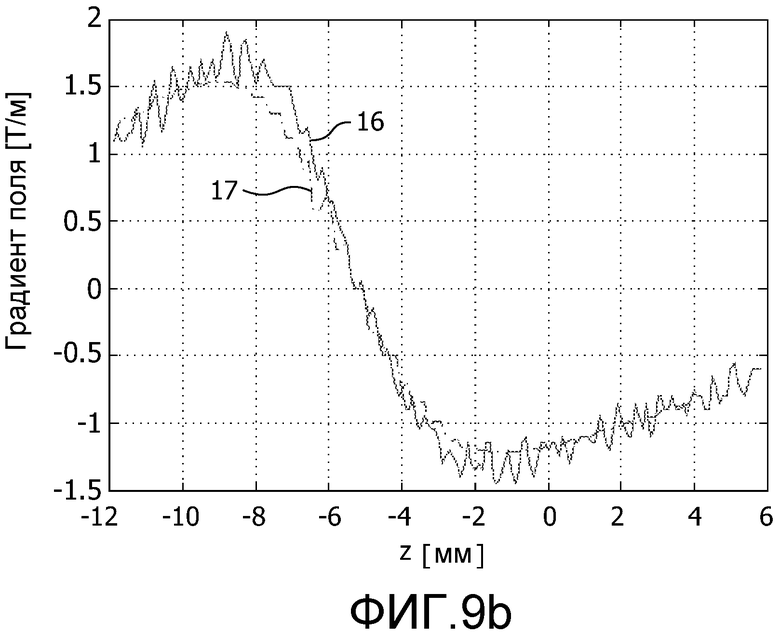
Фиг. 9b изображает диаграмму вертикального градиента поля как функцию вертикальной координаты.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 изображает общий вид квадрупольного магнитного блока, содержащего четыре магнитных субблока 1,2,3 и 4, каждый из которых состоит из электромагнитной катушки с сердечником. Сердечникам придана форма, обеспечивающая сильный градиент магнитного поля на сенсорной поверхности, которая должна быть расположена над квадрупольным магнитным блоком. Сердечники четырех электромагнитных катушек разделены посредством зазоров. Таким образом, возможно выполнять детектирования, например посредством FTIR, снизу сенсорной поверхности. Осветительный луч света может быть пропущен снизу через зазор между двумя сердечниками электромагнитных катушек по направлению к сенсорной поверхности, а отраженный сенсорной поверхностью свет может быть детектирован на детекторе.
Фиг. 2 изображает вид сверху квадрупольного магнитного блока, показанного на Фиг. 1. Ясно видны зазоры между четырьмя сердечниками.
Фиг. 3 изображает результаты вычислений градиента B2, который индуцирован квадрупольным магнитным блоком, показанным на Фиг. 1 и 2. Вычисления выполнены для расстояния 1 мм над магнитными полюсами. Фиг. 3a изображает градиент B2 в единицах Т2/м вдоль линии A-A на фиг.2. Здесь магнитный субблок 1 представляет северный полюс, магнитный субблок 2 представляет южный полюс, а магнитные субблоки 3 и 4 являются нейтральными.
Фиг. 3b изображает градиент B2 в единицах Т2/м вдоль линии B-B на Фиг. 2. Здесь магнитный субблок 1 является северным полюсом, магнитный субблок 3 является южным полюсом, а магнитные субблоки 2 и 4 являются нейтральными. Максимальный приложенный электрический ток составляет 1А.
Как легко видеть из двух примерных градиентов, показанных на Фиг. 3a и 3b, можно легко обеспечить различные конфигурации магнитного поля путем включения и выключения различных магнитных субблоков. Например, градиент B2, показанный на Фиг. 3a, содержит резкий минимум, тогда как градиент, показанный на Фиг. 3b, имеет чрезвычайно широкий минимум. Соответственно, могут быть точно указаны области или связывающие участки, в направлении которых магнитные частицы должны направляться.
Другие эффекты возможны посредством обеспечения, например вращающегося магнитного поля. Для этого четыре катушки квадрупольного магнитного блока приводятся в действие посредством, например, синусоидального тока с максимальным значением 1,5 А и с 90° сдвигом фазы друг между другом.
Для специалиста должно быть очевидно, что вышеизложенные примеры не должны толковаться как ограничивающие область защиты настоящего изобретения. В самом деле, в стандартном эксперименте с использованием биосенсора по настоящему изобретению может быть реализовано большое количество совершенно различных схем управления квадрупольным магнитным блоком. Они могут включать в себя различные статические и динамические схемы воздействия. Более того, квадрупольный магнитный блок не ограничен блоком, показанным на Фиг. 1 и 2. Любой тип квадрупольного расположения магнитных блоков может быть использован в биосенсоре в соответствии с настоящим изобретением. В частности, сердечники электромагнитных катушек могут иметь различные формы в зависимости от конкретного применения.
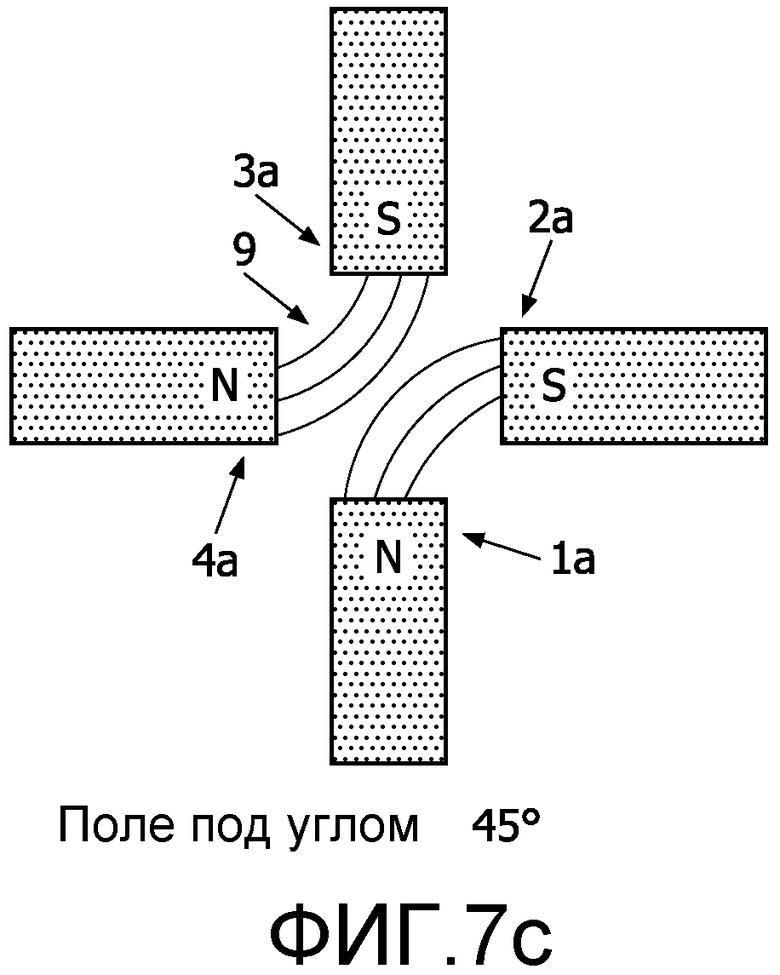
Фиг. 4 изображает вид в поперечном сечении предпочтительного варианта осуществления квадрупольного магнитного блока, который может быть использован в биосенсоре в соответствии с настоящим изобретением. В поперечном сечении видны только два магнитных субблока квадрупольного магнитного блока - 1 и 3. Полный вид сверху магнитного квадруполя можно видеть на Фиг. 6. Магнитный квадруполь содержит четыре магнитных субблока 1, 2, 3 и 4, каждый из которых содержит стержень, выполненный из мягкого железа, с катушкой вокруг него, и полюсный наконечник (1a, 2a, 3a, 4a). Вокруг этих четырех магнитных субблоков расположен квадрат 19, направляющий поток, со стороной 115 мм. Квадрат 19, направляющий поток также выполнен из мягкого железа и имеет сечение 10 мм×10 мм. Стержни сердечников и полюсные наконечники имеют размеры 5 мм×5 мм. Противоположные полюсные наконечники разделяют 10 мм, как можно видеть на Фиг. 4. Для того, чтобы иметь однородное поле над полюсными наконечниками 1a и 3a, а не между ними, полюсные наконечники 1a и 3a скошены под углом 45°. Конечно соответствующие полюсные наконечники 2a и 4a, которые не видны на Фиг. 4, также скошены. Образец 5 расположен в центре квадруполя, в 2 мм над верхней границей полюсов.
Моделирование показывает, что полюсные наконечники, скошенные на 45°, дают приблизительно наименьший горизонтальный градиент поля. На Фиг. 5 показано сравнение моделированных магнитных градиентов для полевых наконечников с углами 30° (кривая 6), 45° (кривая 7) и 60° (кривая 8). Горизонтальный градиент поля полевых наконечников, образующих с сенсорной поверхностью угол 45°, несомненно меньше, чем в двух других случаях.
На Фиг. 7a, 7b и 7c схематически изображены линии 9 потока магнитного тока квадрупольного магнитного блока, показанного на Фиг. 4 и 6 в сечении и в виде сверху. Как можно видеть на Фиг. 7a, линии 9 магнитного поля загнуты наверх из-за скошенных полюсных наконечников. На Фиг. 7a смоделировано магнитное поле между противоположными полюсами 2a и 4a. На Фиг. 7b смоделировано магнитное поле между соседними полюсами 1a-2a и 3a-4a. Оказывается, что в центре квадрупольного магнитного блока, а именно в оптическом поле видения микроскопа, которое имеет размер приблизительно 0,1 мм×0,1 мм, линии 9 поля практически параллельны друг другу.
Для определения градиентов магнитного поля напряженность магнитного поля измерялась как функция горизонтальной координаты x и вертикальной координаты z (сравните Фиг. 4). Напряженность магнитного поля измерялась с помощью датчика Холла, в то время как через две противоположные катушки пропускали постоянный ток +277 мА и -277 мА. Результаты измерений показаны на Фиг. 8a в виде кривой 10. Кривая 11 представляет результаты моделирования.
На Фиг. 8a изображена напряженность поля как функция горизонтальной координаты x. Небольшая асимметрия напряженности поля в направлении x вызвана небольшой асимметрией при установке, потому что установка не была точно выровнена. Измеренная напряженность поля на 20% меньше предсказанной моделированием вследствие неидеальности свойств реального квадруполя по сравнению с моделированиями. На Фиг. 8b изображен горизонтальный градиент магнитного поля как функция горизонтальной координаты x, как измеренный (кривая 12), так смоделированный (13).
На Фиг. 9a изображена напряженность магнитного поля как функция вертикальной координаты z (измерение - кривая 14; моделирование - кривая 15), тогда как на Фиг. 9b показан вертикальный градиент магнитного поля как функция вертикальной координаты z (измерение - кривая 16; моделирование - кривая 17).
Как видно из вышеописанных результатов, используя квадрупольный магнитный блок, показанный на Фиг. 4 и 6, возможно обеспечить одновременно слабый градиент магнитного поля параллельно сенсорной поверхности и сильный магнитный градиент перпендикулярно сенсорной поверхности. Соответственно, на магнитные шарики в магнитном биосенсоре в направлении, перпендикулярном сенсорной поверхности, может действовать большая сила. Таким образом, магнитные шарики могут быть эффективно направлены в сторону сенсорной поверхности или от нее. В то же время боковые силы, действующие на шарики, пренебрежимо малы. Следовательно, предпочтительный вариант осуществления, показанный на Фиг. 4 и 6, позволяет точно управлять магнитными шариками в магнитном биосенсоре.
Одним из преимуществ варианта осуществления, показанного на Фиг. 4 и 6, является то, что однородные магнитные поля создаются в оптическом поле видения с практически отсутствующим горизонтальным градиентом и с вертикальным градиентом, который создает силы, действующие на шарики, одного порядка величины с гравитационными силами. Следовательно, шарики могут быть управляемы и детектированы на большой площади.
Хотя изобретение было проиллюстрировано и описано в деталях на чертежах и в последующем описании, такие иллюстрации и описания должны рассматриваться в качестве иллюстративных или в качестве образца и не ограничивающих; изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть понятны и осуществлены специалистами в данной области, применяя на практике заявленное изобретение, из изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержит» не исключает наличия других элементов или этапов, а единственное число не исключает множественности. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что некоторые измерения перечислены в различных зависимых пунктах не указывает на то, что комбинация этих измерений не может быть использована для получения преимущества. Никакие характерные признаки в формуле изобретения не должны истолковываться в качестве ограничивающих объем притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БИОСЕНСОРА ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАГНИТНЫХ ЧАСТИЦ | 2009 |
|
RU2519655C2 |
| ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ ДЛЯ УЛУЧШЕННОГО ДЕТЕКТИРОВАНИЯ ПРИ АНАЛИЗЕ КЛАСТЕРОВ | 2009 |
|
RU2528102C2 |
| УДАЛЕНИЕ ФОНА ПРИ ПОЛУЧЕНИИ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ МАГНИТНЫХ ЧАСТИЦ | 2012 |
|
RU2622481C2 |
| УСТРОЙСТВА И СПОСОБЫ ПОЛУЧЕНИЯ СЛОЕВ С ОПТИЧЕСКИМ ЭФФЕКТОМ, СОДЕРЖАЩИХ ОРИЕНТИРОВАННЫЕ НЕСФЕРИЧЕСКИЕ МАГНИТНЫЕ ИЛИ НАМАГНИЧИВАЕМЫЕ ЧАСТИЦЫ ПИГМЕНТА | 2016 |
|
RU2715166C2 |
| ПРИВЕДЕНИЕ В ДЕЙСТВИЕ ИМПУЛЬСНЫМ МАГНИТНЫМ ПОЛЕМ ДЛЯ ЧУВСТВИТЕЛЬНЫХ АНАЛИЗОВ | 2009 |
|
RU2520607C2 |
| УСТРОЙСТВО И СПОСОБ ОКАЗАНИЯ ВЛИЯНИЯ И ОБНАРУЖЕНИЯ МАГНИТНЫХ ЧАСТИЦ, ИМЕЮЩИЕ БОЛЬШОЕ ПОЛЕ ЗРЕНИЯ | 2012 |
|
RU2624315C2 |
| ПРОТОКОЛ СМЕШАННОГО ВОЗБУЖДЕНИЯ ДЛЯ УСТРОЙСТВА МАГНИТНОГО БИОДАТЧИКА | 2009 |
|
RU2491540C2 |
| СТАТОР РЕВЕРСИВНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2121206C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБНАРУЖЕНИЯ | 2008 |
|
RU2480768C2 |
| КРАТКОВРЕМЕННАЯ ЗАТУХАЮЩАЯ АМПЕРОМЕТРИЯ | 2007 |
|
RU2439564C2 |
Изобретение относится к измерительной технике, в частности, к медицинской. Устройство представляет собой квадрупольный магнитный блок (1, 2, 3, 4) для обеспечения различного градиента магнитного поля на сенсорной поверхности на дне средства, например, картриджа или камеры, для размещения жидкого образца в биосенсоре с целью управления частицами образца. Также под сенсорной поверхностью расположен детектор частиц, аккумулированных на и/или вблизи сенсорной поверхности, например, оптический детектор, основанный на нарушенном полном внутреннем отражении (FTIR). 13 з.п. ф-лы, 14 ил.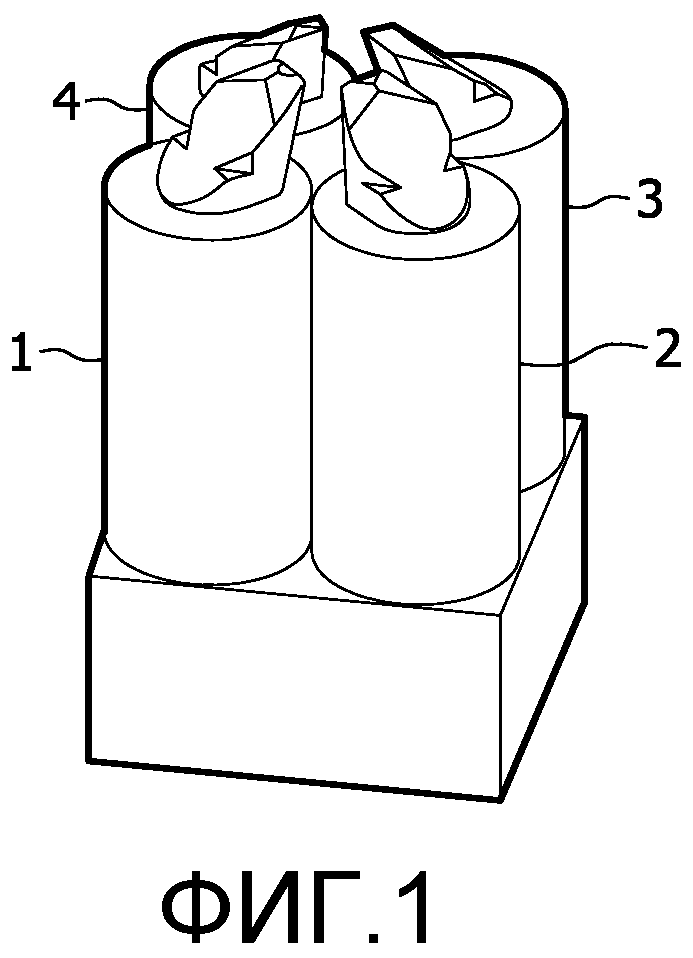
1. Биосенсор, содержащий:
а) средство (5) для размещения жидкого образца, имеющее сенсорную поверхность на своей донной части,
б) квадрупольный магнитный блок, выполненный с возможностью обеспечения градиента магнитного поля на сенсорной поверхности, причем блок расположен под сенсорной поверхностью, и
в) средство для детектирования частиц, аккумулированных на и/или вблизи сенсорной поверхности,
г) причем квадрупольный магнитный блок содержит четыре независимо управляемых магнитных субблока (1, 2, 3, 4),
д) отличающийся тем, что детектирование, в частности оптическое детектирование, выполняется снизу сенсорной поверхности.
2. Биосенсор по п.1, в котором четыре субблока (1, 2, 3, 4) разделены зазором.
3. Биосенсор по п.1, в котором квадрупольный магнитный блок содержит четыре электромагнитных катушки с сердечниками (1a, 2a, 3a, 4a).
4. Биосенсор по п.3, в котором сердечники (1a, 2a, 3a, 4a) четырех электромагнитных катушек имеют форму, выполненную с возможностью обеспечения градиента магнитного поля, требуемого для эффективного направления магнитных шариков в сторону сенсорной поверхности или от нее.
5. Биосенсор по п.4, в котором сердечники (1a, 2a, 3a, 4a) четырех электромагнитных катушек имеют форму, выполненную с возможностью обеспечения градиента магнитного поля, требуемого для эффективного направления магнитных шариков в направлении, перпендикулярном к сенсорной поверхности.
6. Биосенсор по п.5, в котором сердечники (1a, 2a, 3a, 4a) четырех электромагнитных катушек имеют форму, выполненную с возможностью обеспечения градиента магнитного поля, предотвращающего направление магнитных шариков в направлении, параллельном к сенсорной поверхности.
7. Биосенсор по п.6, в котором каждый из сердечников четырех электромагнитных катушек имеет скошенный полюсный наконечник.
8. Биосенсор по п.7, в котором скос полюсных наконечников имеет угол с сенсорной поверхностью между 30˚ и 60˚, предпочтительно между 40˚ и 50˚ и наиболее предпочтительно около 45˚.
9. Биосенсор по п.1, в котором квадрупольный магнитный блок подвижен по отношению к сенсорной поверхности.
10. Биосенсор по п.9, в котором квадрупольный магнитный блок выполнен с возможностью скользить параллельно сенсорной поверхности.
11. Биосенсор по п.1, в котором квадрупольный магнитный блок выполнен с возможностью обеспечения вращающегося магнитного поля.
12. Биосенсор по п.1, в котором квадрупольный магнитный блок выполнен с возможностью обеспечения переключаемого градиента магнитного поля.
13. Биосенсор по п.1, в котором сенсорная поверхность содержит один или более связывающих участков.
14. Биосенсор по п.13, в котором один или более связывающих участков содержат реагент или комбинацию нескольких реагентов.
| Chong H | |||
| Ahn et al | |||
| A Fully Integrated Micromachined Magnetic Particle Separator | |||
| Journal of Microelectromechanical Systems, IEEE Service Center, Piscataway, NJ, US, vol | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| JPH 05215900 A, 27.08.1993 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОБНАРУЖЕНИЯ | 2008 |
|
RU2480768C2 |

