Группа изобретений относится к области управления работой газотурбинных двигателей (ГТД), преимущественно авиационных, и может быть использована для управления подачей топлива в ГТД и направляющими аппаратами компрессора (НАК).
Известен способ управления ГТД, согласно которому регулирование подачи топлива осуществляют по сигналу разности заданной и измеренной частот вращения ротора, а управление НАК осуществляют по измеренной частоте вращения ротора ГТД, причем в процессе работы ГТД определяют передаточные функции по каналам воздействия направляющих аппаратов (НА) и расхода топлива на частоту вращения, находят их отношение и дополнительно осуществляют воздействие на подачу топлива в зависимости от угла установки НА с передаточной функцией, равной определенному отношению передаточной функции ГТД по каналу воздействия НА на частоту вращения к передаточной функции ГТД по каналу воздействия расхода топлива на частоту вращения.
Система для реализации способа управления ГТД содержит блок регулирования подачи топлива в камеру сгорания (КС), замкнутый по частоте вращения ротора через датчик частоты вращения. Блок регулирования подачи топлива выполнен в виде электронного регулятора, вход которого соединен с датчиком частоты вращения, а выход - с одним из входов выходного устройства, которое соединено с исполнительным механизмом насоса - регулятора.
Система также содержит также контур регулирования геометрии проточной части ГТД, включающий в себя регулятор НАК с элементом управления (например, гидроцилиндром) положением НА. Регулятор замкнут через датчик частоты вращения. Элемент управления положением НАК дополнительно соединен с датчиком положения НА, выход которого соединен с блоком коррекции расхода топлива в КС, выход блока соединен со вторым входом выходного устройства системы регулирования топливопитания КС.
В процессе работы системы, рычагом управления двигателя (РУД), через контур топливопитания КС, выводят ГТД на рабочий режим, при котором совместно работают контуры регулирования топливопитания и управления положением НАК.
Сигнал, пропорциональный частоте вращения ротора ГТД, через датчик частоты вращения одновременно поступает на электронный регулятор контура управления топливопитанием и на контур управления НАК. В электронном регуляторе данный сигнал сравнивается с заданным значением частоты вращения ротора. В зависимости от результатов сравнения, электронный регулятор через выходное устройство выдает команду на исполнительный механизм насоса-регулятора, который соответствующим образом воздействует на дозирующий элемент насоса-регулятора.
Одновременно регулятор НА также получает на вход сигнал, пропорциональный частоте вращения ротора ГТД, по которому в соответствии с заданной программой через элемент управления устанавливают новое положение НАК, которое соответствует заданному режиму работы ГТД.
В процессе работы ГТД, в результате внешних возмущений возможно отклонение НАК от заданного положения, которое определяется датчиком положения. Соответствующий сигнал с датчика положения подается на блок коррекции расхода топлива, который выдает сигнал коррекции в контур топливопитания, изменяя тем самым режим подачи топлива в КС, компенсируя возмущающее воздействие отклонения положения НА на частоту вращения ротора ГТД.
(см. патент РФ №2007599, кл. F02C 7/26, 1994 г.).
В результате анализа известных способа и системы управления ГТД необходимо отметить, что они неэффективны при работе на переходных режимах, так как в процессе работы динамическая ошибка регулирования положения НА на переходных режимах приводит к увеличению времени приемистости и сброса. Например, при отставании положения НА от заданной программы при приемистости, сигнал с блока коррекции расхода топлива снижает темп увеличения расхода топлива. В результате, чем больше динамическая ошибка по положению направляющих аппаратов, тем больше время приемистости.
Известен способ управления ГТД, заключающийся в том, что по измеренной частоте вращения ротора ГТД и температуре воздуха на входе в ГТД формируют значение приведенной частоты вращения ротора ГТД, по приведенной частоте формируют заданное положение лопаток НА компрессора ГТД, сравнивают его с измеренным положением лопаток НА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток НА, причем дополнительно на работающем ГТД формируют величину расчетного положения лопаток НА как выходной сигнал звена «чистого» запаздывания, на вход которого подается заданное положение лопаток НА, сравнивают расчетное положение лопаток НА с измеренным положением лопаток НА, и, если разница между ними больше наперед заданной величины, определенной в ходе стендовых испытаний, формируют сигнал «Отказ канала управления НА» и переводят управление НА на резервный регулятор.
Система для реализации способа содержит задатчик режимов работы ГТД, последовательно соединенные задатчик положения сервомотора, первый сумматор, электрогидропреобразователь (ЭГП) и сервомотор, а также последовательно соединенные блок временной задержки и второй сумматор, блок нелинейности (БН), ключ, первый фильтр, причем ключ подключен через второй фильтр к задатчику, а к сервомотору, соединенному с НА, подключен датчик положения НА, выход которого соединен с сумматорами. Задатчик выполнен в виде последовательно соединенных блока приведения, блока умножения (БУ), блока вычисления заданного положения НА. Блок приведения подключен к датчику температуры воздуха на входе в двигатель, а БУ - к датчику частоты вращения ротора двигателя.
По приведенной частоте вращения ротора ГТД, формируемой по сигналам датчика температуры воздуха на входе в двигатель и датчика частоты вращения ротора двигателя, с помощью блока вычисления формируется заданное положение НА для данного режима работы ГТД.
Сигнал заданного положения НА поступает в сумматор, где сравнивается с измеренным положением НА и по величине рассогласования между заданным и измеренным значениями ЭГП осуществляет управление НА с посредством сервомотора.
(см. патент РФ №2351787, кл. F02C 9/18, 2009 г.).
В результате анализа известного способа и системы для его реализации необходимо отметить, что он обеспечивает регулирование положения НА вне зависимости от значения расхода топлива, причем при осуществлении способа максимальная скорость перемещения НА зависит от величины действующих на направляющие аппараты газодинамических сил. Поэтому данный способ может приводить к ложной выработке сигналов отказа НА или задержке формирования сигнала, что весьма нежелательно, так как может привести к помпажу ГТД.
Наиболее близким к заявленной группе изобретений по технической сущности и достигаемому техническому результату является способ управления ГТД, заключающийся в том, что по измеренному положению РУД, измеренной частоте вращения ротора ГТД, измеренной температуре газов за турбиной ГТД, измеренному давлению воздуха за компрессором двигателя формируют управляющее воздействие на расход топлива в КС, по измеренной частоте вращения ротора ГТД и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, формируют заданное положение лопаток НА компрессора ГТД, сравнивают его с измеренным положением лопаток НА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток НА, причем дополнительно контролируют величину рассогласования между заданным и измеренным значениями положения лопаток НА, если рассогласование превышает наперед заданную величину, определяемую по результатам испытаний двигателя на запас газодинамической устойчивости компрессора, ограничивают скорость изменения расхода топлива.
Система, реализующая приведенный выше способ, содержит последовательно соединенные блок датчиков, задатчик режимов работы ГТД, первый сумматор, первый ЭГП, дозатор топлива, второй вход первого сумматора подключен к блоку датчиков. Устройство также содержит последовательно соединенные задатчик положения НА, второй сумматор, второй ЭГП и золотник управления НА, задатчик положения НА и второй вход второго сумматора подключены к блоку датчиков, выход второго сумматора подключен к задатчику режимов работы ГТД.
В процессе работы системы по измеренным с помощью блока датчиков положению РУД, частоте вращения ротора ГТД, температуре газов за турбиной двигателя, давлению воздуха за компрессором, задатчик режимов работы двигателя формирует заданное положение дозатора, которое первым сумматором сравнивается с фактическим положением, измеренным с помощью блока датчиков. По величине рассогласования, поступающей в первый ЭГП, формируется управляющее воздействие на дозатор, посредством которого изменяется расход топлива в КС.
По измеренным с помощью блока датчиков температуре воздуха на входе в двигатель и частоте вращения ротора, задатчик положения НА формирует значение приведенной частоты вращения ротора и по ней формирует заданное положение НА для данного режима работы ГТД.
Заданное значение положения НА поступает на второй сумматор, где сравнивается с измеренным блоком датчиков положением НА. По величине рассогласования между заданным и измеренным значениями НА второй ЭГП осуществляет управление НА посредством золотника.
При исправных элементах контура управления НА фактическое положение НА отличается от заданного практически только на динамических режимах. При этом возникает дисбаланс между расходом воздуха через компрессор ГТД и расходом топлива в КС. Чтобы избежать этого, значение рассогласования между заданным и фактическим положением НА с выхода второго сумматора подается в задатчик режимов работы ГТД, который при превышении наперед заданной величины, определяемой при сдаточных испытаниях двигателя, начинает ограничивать темп изменения расхода топлива. Таким образом, соблюдается баланс между расходом воздуха через компрессор ГТД и расходом топлива в КС.
(см. патент РФ №2379534, кл. F02C 9/00, 2010 г.) - наиболее близкий аналог для способа и системы.
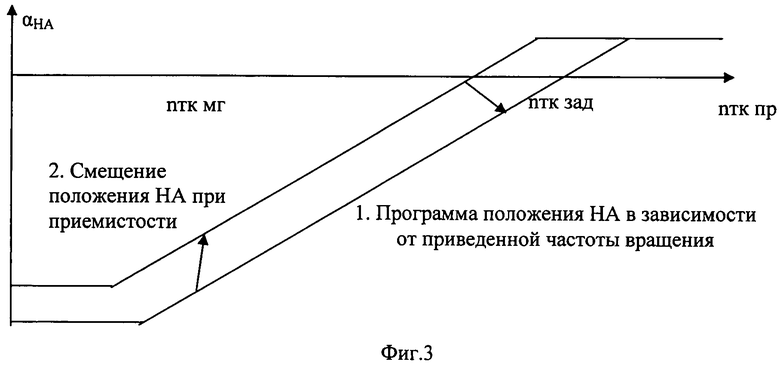
В результате анализа известных способа и системы управления необходимо отметить, что они в процессе работы реализуют общую для установившихся и переходных режимов программу управления положением НА компрессора в зависимости от приведенной частоты вращения ротора, не учитывающую влияния избытков топлива на запасы газодинамической устойчивости (ГДУ). Программа положения НА в зависимости от приведенной частоты вращения ротора для статических режимов работы ГТД выбирается из условия обеспечения минимальной тяги на режиме малого газа и линейного изменения тяги при изменении положения РУД.
Обеспечение минимальной тяги на режиме малого газа достигается путем снижения расхода воздуха через газогенератор (ГГ), для чего на режиме малого газа направляющие аппараты устанавливаются в закрытое положение. Низкий расход воздуха через ГГ на близких к малому газу дроссельных режимах работы ГТД ограничивает избытки топлива на переходных режимах работы, так как избытки топлива вызывают резкое повышение температуры газов перед турбинами и снижение запасов ГДУ компрессора. Как следствие, выбранная для статических режимов программа положения НА является неоптимальной на переходных режимах, за счет чего увеличивается время приемистости ГТД.
Техническим результатом группы изобретений является повышение эффективности управления ГТД на переходных режимах (режимах приемистости) его работы за счет сокращения времени приемистости при сохранении необходимых запасов ГДУ компрессора.
Указанный технический результат обеспечивается тем, что в способе управления газотурбинным двигателем, заключающемся в том, что по измеренному значению частоты вращения ротора турбокомпрессора и температуры газов за турбиной формируют заданное значение расхода топлива в основную камеру сгорания, по показаниям датчиков частоты вращения ротора турбокомпрессора и температуры на входе в двигатель формируют приведенное значение частоты вращения ротора турбокомпрессора, формируют заданное положение направляющих аппаратов, по показаниям датчиков определяют расход топлива и положение направляющих аппаратов, сравнивают их с заданными и по величине рассогласования между заданными и измеренными значениями формируют управляющие воздействия на расход топлива и положение направляющих аппаратов, новым является то, что расход топлива в камеру сгорания газотурбинного двигателя ограничивают максимально заданным расходом, на режиме приемистости дополнительно изменяют положение направляющих аппаратов на их раскрытие, после чего регулируют заданное значение максимального расхода топлива в основную камеру сгорания в зависимости от фактического положения направляющих аппаратов.
В системе управления газотурбинным двигателем, содержащей задатчики режимов работы двигателя, выходы которых связаны с первыми входами первого и второго суммирующих усилителей, вторые входы каждого из которых связаны с датчиками контроля режима работы, устанавливаемого задатчиком, а также исполнительные механизмы управления дозатором подачи топлива в двигатель и положением направляющих аппаратов компрессора, новым является то, что она снабжена задатчиками ограничения температуры газов за турбиной, заданной частоты вращения ротора турбокомпрессора и формирования заданного положения лопаток направляющих аппаратов, вход которого связан с блоком формирования приведенной частоты вращения ротора турбокомпрессора, входами связанным с датчиками частоты вращения ротора турбокомпрессора и температуры воздуха на входе в двигатель, причем система дополнительно оснащена первым и вторым элементами сравнения, первым и вторым селекторами минимального уровня, третьим суммирующим усилителем, нелинейным элементом, усилителем с переменным коэффициентом усиления, датчиком положения направляющих аппаратов компрессора, а также регулятором режимов работы двигателя, первый и второй входы которого связаны соответственно с выходами первого и второго суммирующих усилителей, выходы которых также связаны с первым и вторым входами первого селектора минимального уровня, а выход регулятора связан с первым входом второго селектора минимального уровня, выход задатчика формирования заданного положения лопаток направляющих аппаратов связан с первым входом первого элемента сравнения, со вторым входом которого связан через нелинейный элемент выход первого селектора минимального уровня, выход первого элемента сравнения связан с первым входом третьего суммирующего усилителя, со вторым входом которого связан датчик положения направляющих аппаратов, выход третьего суммирующего усилителя связан с исполнительным механизмом управления положением направляющих аппаратов, при этом, первый вход второго элемента сравнения связан с выходом задатчика формирования заданного положения лопаток направляющих аппаратов, второй вход которого связан с датчиком положения направляющих аппаратов, выход второго элемента сравнения связан со вторым входом усилителя с переменным коэффициентом усиления, с первым входом которого связан с датчиком давления воздуха за компрессором, а выход усилителя с переменным коэффициентом усиления связан со вторым входом второго селектора минимального уровня, выход которого связан с исполнительным механизмом дозирования топлива в двигатель.
Сущность заявленной группы изобретений поясняется графическими материалами, на которых:
на фиг.1 представлена схема системы управления ГТД, посредством которой может быть осуществлен заявленный способ;
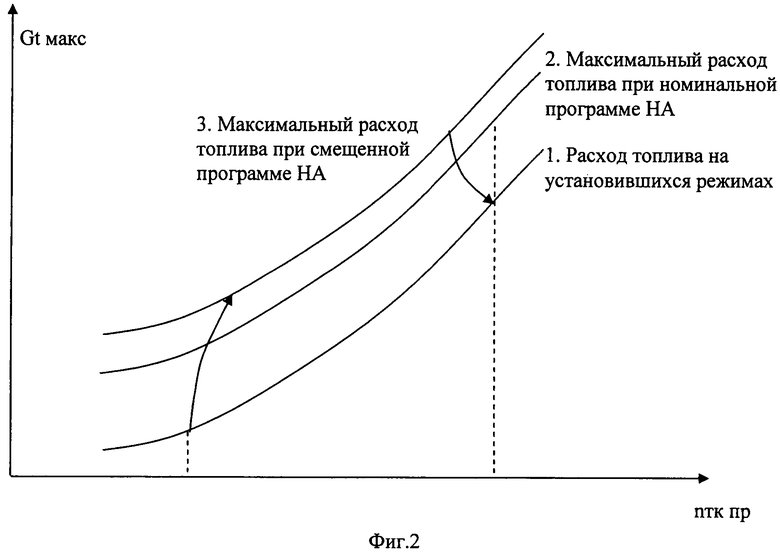
на фиг.2 представлена зависимость расхода топлива от приведенной частоты вращения ротора двигателя при приемистости;
на фиг.3 представлена зависимость положения НА от приведенной частоты вращения ротора двигателя для установившихся режимов и при приемистости,
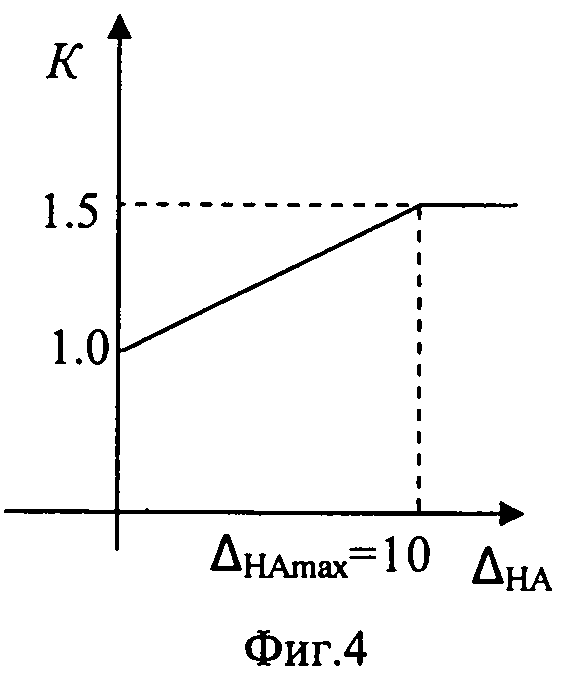
на фиг.4 представлена функциональная зависимость значения переменного коэффициента усиления усилителя;
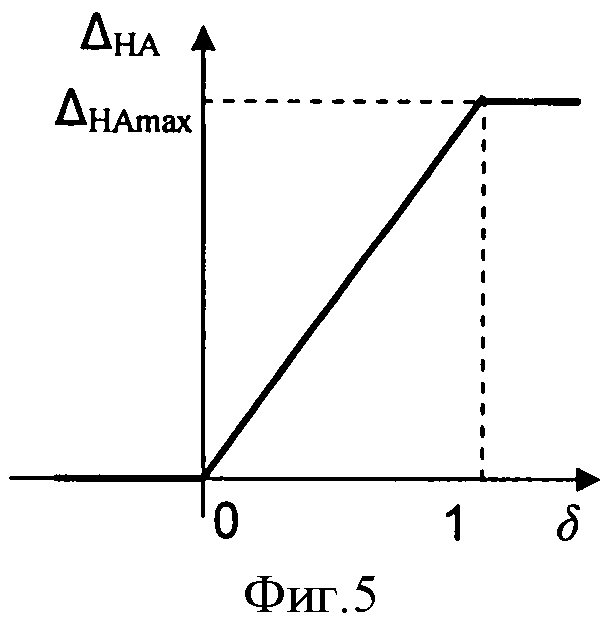
на фиг.5 представлена одна из возможных характеристик используемого нелинейного элемента.
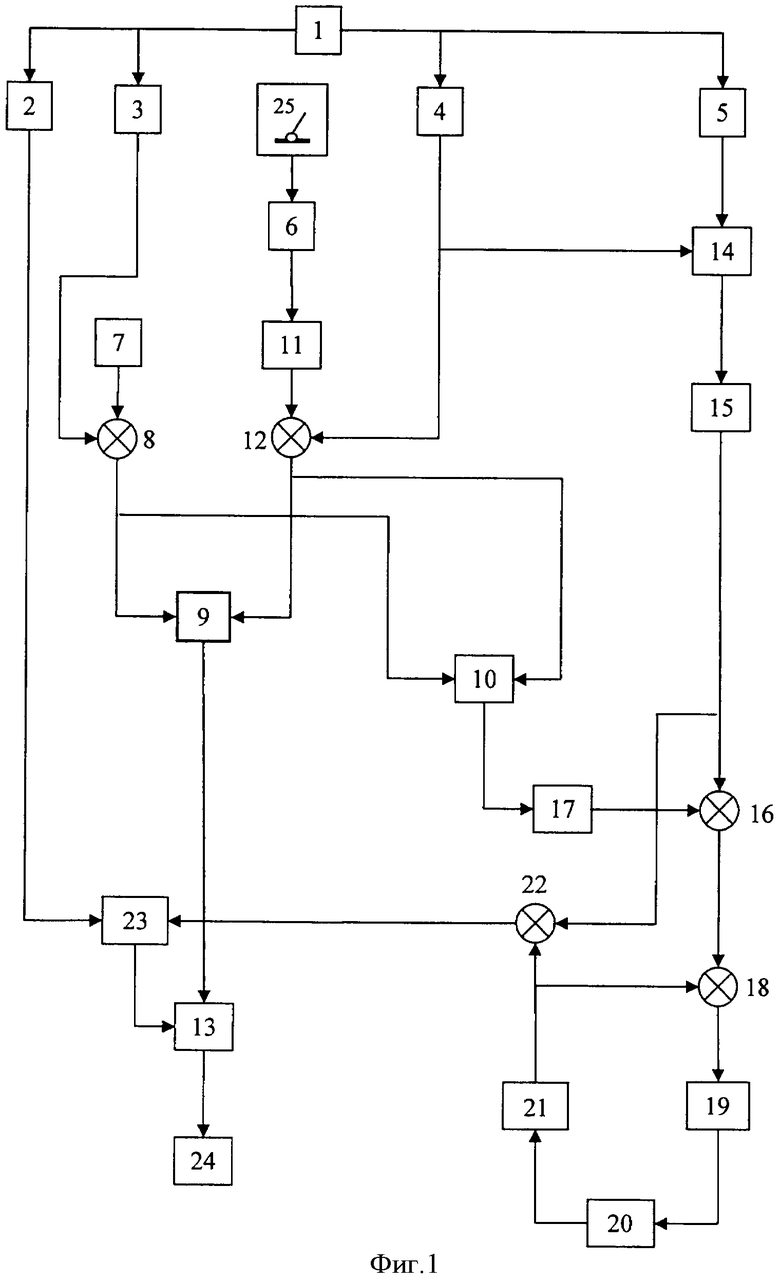
Система управления ГТД 1, реализующая заявленный способ, оснащена датчиками измерения параметров его работы, а именно: датчиком 2 давления воздуха за компрессором ГТД (Рк); датчиком 3 температуры газов за турбиной ГТД (ТТ); датчиком 4 частоты вращения ротора турбокомпрессора (ТК) (nТК); датчиком 5 температуры воздуха на входе в ГТД (ТВХ) и датчиком 6 положения РУД 25.
Система содержит задатчик 7 ограничения температуры газов за турбиной, выход которого связан с первым входом первого суммирующего усилителя 8, к второму входу которого подключен выход датчика 3. Выход первого суммирующего усилителя 8 подключен к первому входу регулятора 9 режимов работы ГТД и к первому входу первого селектора 10 минимального уровня.
Выход датчика 6 положения РУД подключен к входу задатчика 11 заданной частоты вращения ротора ТК, выход которого подключен к первому входу второго суммирующего усилителя 12, к второму входу которого подключен датчик 4 частоты вращения ротора ТК. Выход второго суммирующего усилителя 12 подключен к второму входу регулятора режимов 9 работы ГТД и к второму входу первого селектора 10 минимального уровня.
Выход регулятора 9 подключен к первому входу второго селектора 13 минимального уровня.
Датчик 5 температуры на входе в ГТД и датчик 4 частоты вращения ротора ТК подключены к блоку 14 формирования приведенной частоты вращения ротора ТК, выход которого подключен к входу задатчика 15 формирования заданного положения лопаток НА, выход которого подключен к первому входу первого элемента сравнения 16, к второму входу которого через нелинейный элемент 17 подключен выход первого селектора 10 минимального уровня.
Выход первого элемента сравнения 16 подключен к первому входу третьего суммирующего усилителя 18, к второму входу которого подключен датчик 21 положения НА, отслеживающий перемещение лопаток НА. Выход третьего суммирующего усилителя 18 подключен к входу исполнительного механизма - ЭГП 19, управляющего перемещением штока гидроцилиндра (ГЦ) 20 НА и кинематически связанными с ним лопатками (на схеме не показаны) НА.
Выход задатчика 15 формирования заданного положения лопаток НА также подключен к первому входу второго элемента сравнения 22, к второму входу которого подключен датчик 21 положения НА. Выход второго элемента сравнения 22 подключен к второму входу усилителя 23 с переменным коэффициентом усиления, к первому входу которого подключен датчик 2 давления воздуха за компрессором. Выход усилителя 23 подключен к второму входу второго селектора 13 минимального уровня. Выход второго селектора 13 минимального уровня связан с исполнительным механизмом (дозирующим элементом дозатора) 24 дозирования топлива в КС ГТД 1.
Система укомплектована стандартными датчиками, которые используются по прямому назначению.
В системе используются стандартные элементы аналоговой вычислительной техники на операционных усилителях. В качестве элементов сравнения (16, 22) могут быть использованы операционные усилители с единичным коэффициентом усиления. В качестве суммирующих усилителей (8, 12, 18) могут быть использованы операционные усилители с заданным коэффициентом усиления. В качестве задатчика (7) может быть использован источник напряжения. В качестве задатчиков (11, 15) могут быть использованы матричные устройства реализации произвольных функциональных зависимостей. Такое же устройство может быть использовано в качестве блока формирования приведенной частоты вращения ротора ТК (14). Данный блок должен реализовывать следующую функцию: 
где
nтк - частота вращения ротора ТК;
Твх - температура воздуха на входе в ГТД.
В качестве регулятора 9 режимов работы ГТД может быть использовано устройство, содержащее два стандартных ПИ-регулятора, подключенных к селектору минимального сигнала.
Коэффициент усиления суммирующего усилителя 12 выбираются таким образом, чтобы смещение НА, соответствующее режиму приемистости, достигалось при рассогласовании по частоте вращения, равном 5%. Коэффициент усиления суммирующего усилителя 8 выбирается из условия достижения максимального смещения НА при рассогласовании по температуре газов 100°К.
Элемент 23 является усилителем с переменным коэффициентом. Зависимость коэффициента усиления усилителя 23 от положения НА показана на фиг.4. На оси абсцисс отложено отклонение положения НА от номинальной программы Δαна. Δαна=0 соответствует положение НА на номинальной программе для установившихся режимов, максимальное значение Δαна=10 град, достигается при приемистости. Коэффициент K по оси ординат определяет зависимость максимального расхода топлива от давления за компрессором. Его абсолютная величина является индивидуальной для каждого типа двигателя. Относительное значение K=1,5 определяет уровень ограничения при нахождении НА на программе статических режимов, значение K=1,5 достигается при максимальном смещении НА от программы статических режимов.
Нелинейный элемент 17 определяет величину максимального смещения в сторону раскрытия НА (ΔНАмах) во время приемистости ГТД. Зависимость величины смещения НА ΔНА от относительного рассогласования, например, по частоте вращения δnтк и температуре за турбиной δТТ, реализуемая нелинейным элементом 17, представлена на фиг.5.
Смещение НА выбирается из условий обеспечения максимального расхода воздуха через ГТД на режиме приемистости и сохранения запасов ГДУ. Максимальное допустимое смещение НА ограничено из соображений прочности лопаток компрессора.
На фиг.5 параметр δ на оси абсцисс представляет собой относительное значение рассогласования регуляторов расхода топлива. Нулевое значение рассогласования δ=0 поддерживается на установившихся режимах, когда фактическое значение регулируемого параметра равно заданному. Единичное значение δ=1 достигается при максимальном рассогласовании при приемистости. По оси ординат отложена величина смещения положения направляющих аппаратов. Максимальное смещение Δнамакс составляет 8…10 аэродинамических градусов. Значению относительного рассогласования δ=1 соответствует рассогласование по частоте вращения равное 5%, по температуре за турбиной - 100 град.
Способ, посредством описанной выше системы, реализуют следующим образом.
Режимы работы ГТД 1 задают посредством изменения положения РУД 25.
Задатчик 7 формирует заданное значение ограничения температуры газов за турбиной (например ТТ=const), на первом суммирующем усилителе 8 заданное значение температуры газов за турбиной сравнивается с фактическим, измеренным с помощью датчика 3, и умножается на масштабирующий коэффициент, в результате чего формируется относительный сигнал ошибки по температуре газов за турбиной, который поступает на первый вход регулятора 9 режимов работы ГТД.
Задатчик 11 согласно показаниям датчика 6 РУД 26 формирует заданное значение частоты вращения ротора ТК (например, nТКзад=f(αРУД)), на втором суммирующем усилителе 12 заданное значение сравнивается с фактическим, измеренным с помощью датчика 4, и умножается на масштабирующий коэффициент, в результате чего формируется относительный сигнал ошибки по частоте вращения ротора ТК, который поступает на второй вход регулятора 9 режимов работы ГТД.
Регулятор 9 режимов работы ГТД по относительным ошибкам параметров работы ГГ: частоте вращения ротора ТК и температуре газов за турбиной формирует расход топлива Gt для поддержания заданной частоты вращения ротора ТК и ограничения температуры газов за турбиной.
По показаниям датчика 2 усилитель 23 формирует максимальное значение расхода топлива в ГТД пропорционально давлению за компрессором, как GtMax=K*Рк. Коэффициент усиления изменяет свое значение в зависимости от выходного значения второго элемента сравнения 22. Максимальное и минимальное значения коэффициент усиления усилителя 23 выбираются известным образом из условий сохранения необходимых запасов ГДУ ГТД при приемистости.
Расход топлива Gt, сформированный регулятором 9 ограничивается максимальным значением расхода GtMax на втором селекторе 13 минимального уровня и управляющий сигнал подается на дозирующий элемент дозатора 24 для дозирования топлива в КС ГТД.
Блок 14 по показаниям датчика 4 частоты вращения ротора ТК и датчика 5 температуры на входе в ГТД формирует значение приведенной частоты вращения ротора ТК (nТКпр), согласно которому задатчик 15 формирует заданное положение лопаток НА (α=f(nТКпр)), значение с которого передается на первый вход первого элемента сравнения 16.
Сигналы относительных ошибок, сформированные суммирующими усилителями 8 и 12, поступают на первый и второй входы первого селектора 10 минимального уровня.
Выходной сигнал селектора 10 масштабируется и ограничивается нелинейным элементом 17. Выходом нелинейного элемента 17 является смещение программы НА. Сигнал с выхода нелинейного элемента 17 поступает на второй вход первого элемента сравнения 16, в котором формируется заданное положение НА с учетом смещения.
Таким образом, на выходе первого элемента сравнения 16 формируется сигнал заданного положения лопаток НА с учетом отклонения параметров работы ГГ. Это значение поступает на вход третьего суммирующего усилителя 18, на второй вход которого так же поступает с датчика 21 сигнал, характеризующий фактическое значение положения лопаток НА. Суммирующий усилитель 18 формирует ошибку, усиливает ее и передает на ЭГП 19. Сигнал ЭГП задает скорость перемещения ГЦ НА 20, который позиционирует лопатки НА в заданном положении. Положение лопаток измеряется датчиком 21
На установившемся режиме работы ГТД текущее значение температуры газов за турбиной существенно ниже значения ограничения, формируемого задатчиком 7. На первом суммирующем усилителе 8 будет сформирован сигнал относительной ошибки больше 1. Значение частоты ротора ТК, формируемое датчиком 4, равно заданному значению частоты вращения ротора ТК, формируемого задатчиком 11 для данного положения РУД 25. На втором суммирующем усилителе 12 будет сформирован нулевой сигнал относительной ошибки. Регулятор 9 режима работы ГТД не будет изменять свой выходной сигнал, так как изменения режима не требуется, фактическая частота совпадает с заданной, а температура за турбиной ниже ограничения.
На первом селекторе минимального уровня 10 сигналы относительных ошибок по рассогласованию параметров работы ГГ: частоте ротора ТК и температуре газов за турбиной селектируются по минимальному уровню. Выходом селектора 10 будет являться нулевой сигнал, а значит и нулевое смещение НА.
Первый элемент сравнения 16 суммирует заданное значение программы НА, сформированное задатчиком 15 по текущему значению приведенной частоты вращения ротора ТК с нулевым смещением программы НА, сформированное селектором 10 и нелинейным элементом 17. Таким образом, на установившемся режиме работы ГТД дополнительного смещения НА не происходит.
Фактическое значение положения НА равно заданному, поэтому выход второго элемента сравнения 22 равен нулю, коэффициент усиления усилителя 23 минимальный. Тем самым ограничивая максимальный расход в двигатель значением, соответствующим максимально допустимого расходу в ГТД для несмещенного положения НА.
На втором селекторе 13 минимального уровня выбирается значение расхода Gt, сформированное регулятором 9 режимов работы ГТД, так как оно меньше ограничения GtMax, сформированного цепью элементов датчик 2 - усилитель 24. Изменения в дозировании топлива не происходит и режим работы ГТД остается неизменным.
При резком перемещении РУД 25 (переходе на режим приемистости) происходит значительное (более чем на 5%) изменение заданного значения nТК. На втором суммирующем усилителе 12 формируется сигнал относительной ошибки по частоте вращения ротора ТК больше 1.
На первом элементе сравнения 8 формируется сигнал относительной ошибки по температуре газов за турбиной больше 1.
Сигналы относительных ошибок поступают в регулятор 9 режимов работы ГТД и он формирует расход топлива на парирование этих ошибок и увеличение режима работы ГТД.
Сигналы относительных ошибок поступают на входы селектора 10 минимального уровня, который выбирает из них наименьший. Так как сигналы относительных ошибок больше 1, то на выходе селектора 10 будет сигнал больше 1 и на выходе нелинейного элемента 17 будет сформировано максимальное смещение НА.
Первый элемент сравнения 16 задает смещение НА на величину, сформированную задатчиком 15 по текущему значению приведенной частоты вращения, на величину максимального смещения. Третий суммирующий усилитель 18 формирует управляющий сигнал на ЭГП 19 для перемещения ГЦ НА 20.
В первый момент времени после перемещения РУД в сторону повышения режима двигателя НА будут находиться в положении установившегося режима, следовательно, второй элемент сравнения 22 сформирует нулевой сигнал ошибки и коэффициент усилителя 23 будет иметь минимальное выбранное значение. Ограничение максимального расхода топлива будет соответствовать статическому режиму работы. При этом, потребное значение расхода топлива, сформированное регулятором 9 режима работы ГТД, будет больше ограничения максимального расхода, следовательно, второй селектор 13 минимального уровня ограничит расход топлива в КС максимальным расходом для статического режима.
Следящая система НА (элементы 18, 19, 20, 21) парирует ошибку по положению НА, одновременно возрастает рассогласование между программой НА, сформированной задатчиком 15 и фактическим положением НА, пропорционально этой ошибке коэффициент усиления усилителя 23 увеличивается до максимального выбранного значения, соответствующего режиму приемистости. Когда НА выходят на заданное с учетом смещения значение, ошибка, сформированная вторым элементом сравнения 22, достигает максимального значения и коэффициент усилителя 23 перестает увеличиваться. При этом расход воздуха через ГТД достигает своего максимального значения, возрастают запасы ГДУ двигателя, а, следовательно, ограничение максимального расхода топлива можно увеличивать до заданного значения.
Подробно процесс изменения расхода топлива и изменения положения НА при приемистости иллюстрирован на фиг.2 и 3. Так, на фиг.2 нижняя кривая (1) характеризует изменения расхода топлива на установившихся режимах работы ГТД. Зависимости, представленные кривыми 2 и 3 характеризуют два значения максимального расхода топлива, которые заранее экспериментально и/или расчетным путем определены для каждого режима работы ГТД из условия обеспечения газодинамической устойчивости компрессора, причем зависимость, представленная на кривой 2 определена из условия, что НА занимают положение для установившихся режимов работы ГТД и их положение соответствует линии 1 на фиг.3. Зависимость, представленная на кривой 3 фиг.2 определена из условия, что при том же значении частоты вращения ротора НА смещены в сторону раскрытия и их положение соответствует линии 2 на фиг.3. Значение максимального расхода топлива для дополнительно смещенного положения НА примерно в 1,5 раза выше, чем для случая, когда положение НА соответствует основной программе.
При резком перемещении РУД 26 заданное значение частоты вращения ТК (nтк) изменяется от начального значения на режиме малого газа (nтк мг) до заданного значения (nтк зад). Одновременно формируется управляющее воздействие на расход топлива и раскрытие НА. Расход топлива увеличивается и НА смещаются в сторону раскрытия. На начальном этапе приемистости расход топлива определяется линией 2 для номинальной программы НА. Пока НА занимают положение для установившихся режимов, дозатор топлива устанавливается в положение, обеспечивающее первое значение максимального расхода, то есть, значение максимального расхода для установившихся режимов. Одновременно подается сигнал управления на дополнительное смещение НА в сторону раскрытия относительно положения, которое они занимают на установившихся режимах, в результате чего НА за время (0,1-0,2) секунды смещаются в новое положение.
По мере смещения НА из положения для статических режимов (линия 1 на фиг.3) в положение для приемистости (линия 2 на фиг.3), пропорционально повышают значение максимального расхода топлива. Когда НА смещены в положение приемистости, значение максимального расхода топлива равно значению расхода на приемистости. За счет дополнительного увеличения расхода топлива повышается ускорение ротора ГТД.
Когда фактическое значение частоты вращения ротора приближается к заданному значению, НА перемещаются в заданное для установившихся режимов положение. Одновременно снижается расход топлива. Когда фактическая частота вращения ТК равна заданному значению, расход топлива равен его расходу на установившихся режимах, процесс приемистости закончен.
Таким образом, при смещении НА в сторону раскрытия существенно возрастает расход воздуха через ГТ и снижается температура газов перед турбинами, что позволяет повысить расход топлива без снижения запасов ГДУ компрессора. Возрастают мощность турбин и ускорение роторов ГТД, разгон ГТД протекает более интенсивно. Для двухвального двигателя достигается опережающий разгон ротора компрессора низкого давления, что обеспечивает более быстрый набор тяги.
Заявленные способ и система управления позволяют ограничить расход топлива в ГДУ и сохранить ГДУ, например, при ограниченной скорости перемещения НА. Одновременно с этим способ и система позволяют увеличить расход воздуха через двигатель, когда это необходимо (при резком изменении режима работы двигателя) и сократить время приемистости примерно на (25-30)% по сравнению с решением из наиболее близкого аналога.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2022 |
|
RU2774564C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474711C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2705500C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2022 |
|
RU2779807C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
Группа изобретений относится к области управления работой ГТД, преимущественно авиационных, и может быть использована для управления подачей топлива в ГТД и НАК. Способ управления газотурбинным двигателем заключается в том, что расход топлива в камеру сгорания газотурбинного двигателя ограничивают максимально заданным расходом, на режиме приемистости дополнительно изменяют положение направляющих аппаратов на их раскрытие, после чего регулируют заданное значение максимального расхода топлива в основную камеру сгорания в зависимости от фактического положения направляющих аппаратов. Предложена также система для реализации данного способа управления газотурбинным двигателем. Техническим результатом группы изобретений является повышение управления ГТД на переходных режимах (режимах приемистости) его работы за счет сокращения времени приемистости при сохранении необходимых запасов ГДУ компрессора. 2 н.п. ф-лы, 5 ил.
1. Способ управления газотурбинным двигателем, заключающийся в том, что по измеренному значению частоты вращения ротора турбокомпрессора и температуры газов за турбиной формируют заданное значение расхода топлива в основную камеру сгорания, по показаниям датчиков частоты вращения ротора турбокомпрессора и температуры на входе в двигатель формируют приведенное значение частоты вращения ротора турбокомпрессора, формируют заданное положение направляющих аппаратов, по показаниям датчиков определяют расход топлива и положение направляющих аппаратов, сравнивают их с заданными и по величине рассогласования между заданными и измеренными значениями формируют управляющие воздействия на расход топлива и положение направляющих аппаратов, отличающийся тем, что расход топлива в камеру сгорания газотурбинного двигателя ограничивают максимально заданным расходом, на режиме приемистости дополнительно изменяют положение направляющих аппаратов на их раскрытие, после чего регулируют заданное значение максимального расхода топлива в основную камеру сгорания в зависимости от фактического положения направляющих аппаратов.
2. Система управления газотурбинным двигателем, содержащая задатчики режимов работы двигателя, выходы которых связаны с первыми входами первого и второго суммирующих усилителей, вторые входы каждого из которых связаны с датчиками контроля режима работы, устанавливаемого задатчиком, а также исполнительные механизмы управления дозатором подачи топлива в двигатель и положением направляющих аппаратов компрессора, отличающаяся тем, что она снабжена задатчиками ограничения температуры газов за турбиной, заданной частоты вращения ротора турбокомпрессора и формирования заданного положения лопаток направляющих аппаратов, вход которого связан с блоком формирования приведенной частоты вращения ротора турбокомпрессора, входами связанным с датчиками частоты вращения ротора турбокомпрессора и температуры воздуха на входе в двигатель, причем система дополнительно оснащена первым и вторым элементами сравнения, первым и вторым селекторами минимального уровня, третьим суммирующим усилителем, нелинейным элементом, усилителем с переменным коэффициентом усиления, датчиком положения направляющих аппаратов компрессора, а также регулятором режимов работы двигателя, первый и второй входы которого связаны соответственно с выходами первого и второго суммирующих усилителей, выходы которых также связаны с первым и вторым входами первого селектора минимального уровня, а выход регулятора связан с первым входом второго селектора минимального уровня, выход задатчика формирования заданного положения лопаток направляющих аппаратов связан с первым входом первого элемента сравнения, со вторым входом которого связан через нелинейный элемент выход первого селектора минимального уровня, выход первого элемента сравнения связан с первым входом третьего суммирующего усилителя, со вторым входом которого связан датчик положения направляющих аппаратов, выход третьего суммирующего усилителя связан с исполнительным механизмом управления положением направляющих аппаратов, при этом первый вход второго элемента сравнения связан с выходом задатчика формирования заданного положения лопаток направляющих аппаратов, второй вход которого связан с датчиком положения направляющих аппаратов, выход второго элемента сравнения связан со вторым входом усилителя с переменным коэффициентом усиления, первый вход которого связан с датчиком давления воздуха за компрессором, а выход усилителя с переменным коэффициентом усиления связан со вторым входом второго селектора минимального уровня, выход которого связан с исполнительным механизмом дозирования топлива в двигатель.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2379534C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2351787C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
RU2007599C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2344305C1 |
| US 6568166 A1, 27.05.2003 | |||
| DE 202004009381 U1, 12.08.2004. | |||

