Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, заключающийся в том, что по измеренной частоте вращения ротора двигателя по известной зависимости формируют заданное положение лопаток входного направляющего аппарата (ВНА) компрессора двигателя, в соответствии с ним α до заданной частоты вращения удерживают лопатки ВНА в положении «закрыто», после выхода двигателя на режимы, где частота вращения выше заданной, устанавливают лопатки ВНА в положении «открыто» [1].
Недостатком известного способа является его низкая эффективность с точки зрения обеспечения требуемых запасов газодинамической устойчивости (ГДУ) компрессора и, как следствие, невозможность использования для управления современными ГТД, а именно турбореактивными двигателями с высокой степенью двухконтурности (ТРДД), такими, например, как двигатели семейства ПС-90А.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, заключающийся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по известной зависимости формируют заданное положение лопаток направляющего аппарата (НА) компрессора двигателя, сравнивают его с измеренным положением лопаток НА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток НА [2].
Недостатком этого способа является следующее.
При отказе элемента САУ, например электрогидропреобразователя, формирующего гидравлическую команду на перекладку гидроцилиндров привода лопаток НА, нарушается соответствие между располагаемым расходом топлива в камеру сгорания (КС) двигателя и требуемым расходом воздуха через газовоздушный тракт двигателя.
Это может привести к забросу параметров газогенератора (например, температуры газов перед турбиной) или к потере газодинамической устойчивости компрессора ГТД-помпажу.
Это, в свою очередь, приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления газотурбинным двигателем, заключающемся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по приведенной частоте формируют заданное положение лопаток направляющего аппарата (НА) компрессора двигателя, сравнивают его с измеренным положением лопаток НА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток НА, дополнительно на работающем двигателе формируют величину расчетного положения лопаток НА как выходной сигнал звена «чистого» запаздывания, на вход которого подается заданное положение лопаток НА, сравнивают расчетное положение лопаток НА с измеренным положением лопаток НА, если разница между ними больше наперед заданной величины, определенной в ходе стендовых испытаний, формируют сигнал «Отказ канала управления НА» и переводят управление НА на резервный регулятор.
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит задатчик 1 режимов работы двигателя, последовательно соединенные задатчик 2 положения сервомотора, первый сумматор 3, электрогидропреобразователь 4 и сервомотор 5, а также последовательно соединенные блок 6 временной задержки и второй сумматор 7, блок 8 нелинейности (БН), ключ 9, первый фильтр 10, причем ключ 9 подключен через второй фильтр 11 к задатчику 1, а к сервомотору 5, соединенному с направляющим аппаратом 12 (НА), подключен датчик 13 положения НА, выход которого соединен с сумматорами 3 и 7. Задатчик 2 выполнен в виде последовательно соединенных блока 14 приведения, блока 15 умножения (БУ), блока 16 вычисления заданного положения НА. Блок 14 подключен к датчику 17 температуры (Твх.) воздуха на входе в двигатель, а БУ 15 - к датчику частоты вращения ротора двигателя (n).
Устройство работает следующим образом.
По приведенной частоте (nпр) вращения ротора двигателя, формируемой по сигналам Твх. (от датчика 17) и n (от датчика 18) в БУ 15 с помощью блока 14, блок 16 формирует заданное положение НА (α на зад.) для данного режима работы двигателя.
Сигнал α на зад. поступает в сумматор 3, где сравнивается с измеренным положением НА (от датчика 13). По величине рассогласования между заданным и измеренным значениями электрогидропреобразователь 4 осуществляет управление НА 12 с помощью сервомотора 5.
При исправных элементах контура управления НА (электрогидропреобразователя 4, сервомотора 5, датчика 13) фактическое положение НА отличается от заданного практически только на динамических режимах. Т.к. величина α на зад. определяется приведенной частотой вращения, которая изменяется плавно, то величина рассогласования в динамически отлаженной системе определяется в определяющей степени транспортным запаздыванием в цепи управления НА. В силу этого расчетное положение (α на расч.) НА определяется с помощью блока 6 временной задержки, настройка которого определяется в процессе сдаточных испытаний САУ на двигателе и корректируется при регламентных работах в процессе эксплуатации. В сумматоре 7 величина α на расч. сравнивается с измеренным положением НА. Если разность между ними больше наперед заданной величины, определенной в ходе стендовых испытаний САУ, на выходе БН 8 формируется сигнал, подаваемый на вход ключа 9.
В случае, если управление НА осуществляет задатчик 2, т.е. двигатель запущен, давление рабочего тела в сервомоторе 5 есть, и, например, в электронно-гидромеханической САУ селектор «электроника-гидромеханика» (на чертеже не показан) находится в положении «электроника», а управление НА осуществляет задатчик 2 с помощью электропреобразователя 4 - все это определяет задатчик 1, который управляет ключом 9, ключ 9 замкнут, сигнал проходит на вход фильтра 10, который по заданному алгоритму формирует сигнал «Отказ канала управления НА». По этому сигналу задатчик 1 переводит управление НА на резервный регулятор (на чертеже не показан).
В случае, если задатчик 2 отключен от управления НА (управление НА изначально осуществляет резервный регулятор), ключ 9 разомкнут и сигнал отказа не формируется.
В случае, если задатчик 2 включился в контур управления НА на работающем двигателе, задатчик 1 формирует сигнал, подаваемый на вход фильтра 11, который обеспечивает задержку на замыкание ключа 9 в течение времени, которое необходимо, чтобы электропреобразователь 4 успел поставить сервомотор 5 в положение, заданное блоком 16.
Таким образом, обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Источники информации
1. Черкасов Б.А. «Автоматика и регулирование ВРД», М.: Машиностроение, 1965.
2. Шляхтенко С.М. Теория авиационных ВРД. - М.: Машиностроение, 1974 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления входным направляющим аппаратом компрессора газотурбинного двигателя | 2022 |
|
RU2795359C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2418962C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2379534C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2416035C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2010 |
|
RU2454557C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2493392C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что на работающем двигателе формируют величину расчетного положения лопаток НА как выходной сигнал звена «чистого» запаздывания, на вход которого подается заданное положение лопаток НА, сравнивают расчетное положение лопаток НА с измеренным положением лопаток НА, если разница между ними больше наперед заданной величины, определенной в ходе стендовых испытаний, формируют сигнал «Отказ канала управления НА» и переводят управление НА на резервный регулятор. Технический результат - повышение надежности работы двигателя за счет повышения контролепригодности САУ, что обеспечивает своевременное обнаружение отказов основного регулятора НА и своевременный перевод управления двигателем на резервный регулятор при отказе основного. 1 ил.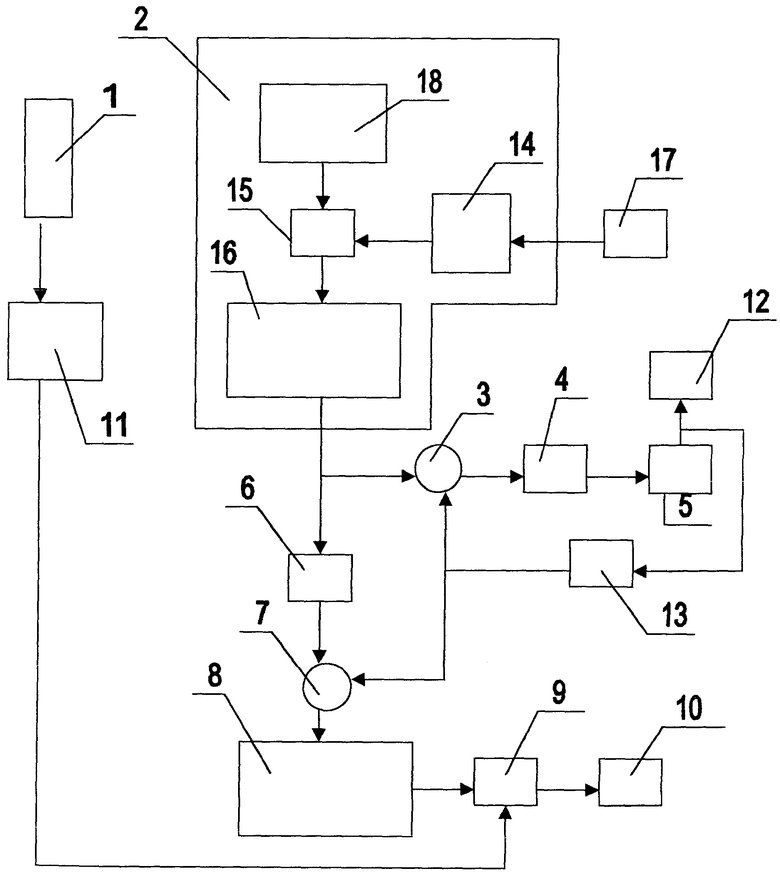
Способ управления газотурбинным двигателем, заключающийся в том, что по измеренной частоте вращения ротора двигателя и температуре воздуха на входе в двигатель формируют значение приведенной частоты вращения ротора двигателя, по приведенной частоте формируют заданное положение лопаток направляющего аппарата (НА) компрессора двигателя, сравнивают его с измеренным положением лопаток НА, по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод лопаток НА, отличающийся тем, что дополнительно на работающем двигателе формируют величину расчетного положения лопаток НА как выходной сигнал звена «чистого» запаздывания, на вход которого подается заданное положение лопаток НА, сравнивают расчетное положение лопаток НА с измеренным положение лопаток НА, и, если разница между ними больше наперед заданной величины, определенной в ходе стендовых испытаний, формируют сигнал «Отказ канала управления НА» и переводят управление НА на резервный регулятор.
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
SU1760797A1 |
| ОСЕВОЙ МНОГОСТУПЕНЧАТЫЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2206796C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПОВОРОТНЫХ НАПРАВЛЯЮЩИХ ЛОПАТОК ВХОДНОГО НАПРАВЛЯЮЩЕГО АППАРАТА КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU1588027C |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПОВОРОТНЫХ НАПРАВЛЯЮЩИХ ЛОПАТОК КОМПРЕССОРА ИЛИ ТУРБИНЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2098670C1 |
| FR 2877406 А, 05.05.2006 | |||
| DE 202004009381 U, 12.08.2004. | |||

