Изобретения относятся к областям радиосвязи, радиолокации, радионавигации и радиоэлектронной борьбы и могут быть использованы для обеспечения амплитудной, фазовой и частотной модуляции.
Известен способ амплитудной, фазовой и частотной модуляции высокочастотного сигнала, основанный в режиме частотной модуляции на преобразовании энергии источника постоянного напряжения в энергию высокочастотного сигнала, организации внешней положительной обратной связи между нагрузкой и управляющим электродом первого нелинейного элемента, выполнении условий возбуждения в виде баланса амплитуд и баланса фаз, определяющих соответственно амплитуду и частоту генерируемого высокочастотного сигнала, и условий согласования первого нелинейного элемента с нагрузкой, изменении частоты генерируемого высокочастотного сигнала путем изменения баланса фаз за счет изменения параметра второго нелинейного элемента, включенного в избирательную нагрузку, по закону изменения амплитуды низкочастотного управляющего (первичного, информационного) сигнала (см. Гоноровский И.С. Радиотехнические цепи и сигналы - М.: «Дрофа». - 2006, с.434-437). В режиме амплитудной и фазовой модуляции на вход устройства подключают источник высокочастотного сигнала и изменяют его амплитуду и фазу.
Известно устройство амплитудной и фазовой модуляции и частотной модуляции высокочастотного сигнала, состоящее из источника постоянного напряжения, устанавливающего рабочую точку на середине квазилинейного участка проходной вольтамперной характеристики транзистора, реактивного четырехполюсника, нагрузки в виде параллельного колебательного контура, в который включен варикап, подключенный к источнику управляющего сигнала, RC-цепи внешней положительной обратной связи между нагрузкой и управляющим электродом транзистора, при этом параметры контура, транзистора и варикапа выбраны из условия обеспечения заданных амплитуды и диапазона изменения частоты генерируемого высокочастотного сигнала по закону изменения амплитуды низкочастотного управляющего (первичного, информационного) сигнала (см. Гоноровский И.С. Радиотехнические цепи и сигналы - М.: «Дрофа». - 2006, с.434-437). В режиме амплитудной и фазовой модуляции на вход устройства подключают источник высокочастотного сигнала и изменяют его амплитуду и фазу. Принцип действия этого устройства состоит в следующем. В режиме частотной модуляции при включении источника постоянного напряжения (тока) в силу скачкообразного изменения амплитуды во всей цепи возникают колебания, спектр которых занимает весь частотный радиодиапазон. Амплитуды этих колебаний быстро затухают. Однако, благодаря наличию цепи положительной обратной связи, колебание с частотой, равной резонансной частоте колебательного контура, поступает на управляющий электрод транзистора, который в силу согласования с помощью реактивного четырехполюсника начинает работать в режиме усиления до момента увеличения амплитуды этого колебания до уровня, при котором наступает режим насыщения (ограничения амплитуды). Наступает стационарный режим. В этом режиме изменение емкости варикапа под действием управляющего сигнала приводит к изменению частоты генерируемого сигнала по закону изменения амплитуды низкочастотного сигнала. В режиме амплитудной и фазовой модуляции на вход устройства подключают источник высокочастотного сигнала и изменяют его амплитуду и фазу под действием управляющего сигнала в общем случае по неконтролируемому закону, поскольку устройство синтезировано только по критерию обеспечения частотной модуляции.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ амплитудной, фазовой и частотной модуляции высокочастотного сигнала, основанный в режиме частотной модуляции на преобразовании энергии источника постоянного напряжения в энергию высокочастотного сигнала, организации внутренней обратной связи в первом нелинейном элементе путем использования в качестве него двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, выполнении условий возбуждения в виде баланса амплитуд и баланса фаз, определяющих соответственно амплитуду и частоту генерируемого высокочастотного сигнала, и условий согласования первого нелинейного элемента с нагрузкой, изменении частоты генерируемого высокочастотного сигнала путем изменения баланса фаз за счет изменения параметра второго нелинейного элемента, включенного в избирательную нагрузку, по закону изменения амплитуды низкочастотного управляющего (первичного, информационного) сигнала (см. Гоноровский И.С. Радиотехнические цепи и сигналы - М.: «Дрофа». - 2006, с.414-417, 434-437).). В режиме амплитудной и фазовой модуляции на вход устройства подключают источник высокочастотного сигнала и изменяют его амплитуду и фазу.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является устройство амплитудной, фазовой и частотной модуляции высокочастотного сигнала, состоящее из источника постоянного напряжения, устанавливающего рабочую точку на середине падающего участка вольтамперной характеристики двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, реактивного четырехполюсника, нагрузки в виде параллельного колебательного контура с включенным варикапом, подключенным к источнику управляющего сигнала, при этом параметры контура, двухполюсного нелинейного элемента и варикапа выбраны из условия обеспечения заданных амплитуды и диапазона изменения частоты генерируемого высокочастотного сигнала по закону изменения амплитуды низкочастотного управляющего (первичного, информационного) сигнала (см. Гоноровский И.С. Радиотехнические цепи и сигналы - М.: «Дрофа». - 2006, с.414-417, 434-437). Принцип действия этого устройства состоит в следующем. В режиме частотной модуляции при включении источника постоянного напряжения (тока) в силу скачкообразного изменения амплитуды во всей цепи возникают колебания, спектр которых занимает весь частотный радиодиапазон. Амплитуды этих колебаний быстро затухают. Однако, благодаря наличию внутренней обратной связи в двухполюсном нелинейном элементе на участке с падающей вольтамперной характеристикой возникает отрицательное дифференциальное сопротивление, которое в силу согласования с помощью реактивного четырехполюсника компенсирует потери в контуре. Благодаря этому, колебание с частотой, равной резонансной частоте колебательного контура, усиливается до момента увеличения амплитуды этого колебания до уровня, при котором амплитуда выходит за пределы падающего участка вольтамперной характеристики. Наступает стационарный режим. В этом режиме изменение емкости варикапа под действием управляющего сигнала приводит к изменению частоты генерируемого сигнала по закону изменения амплитуды низкочастотного сигнала. В режиме амплитудной и фазовой модуляции на вход устройства подключают источник высокочастотного сигнала и изменяют его амплитуду и фазу.
Недостатком способа и устройства является наличие двух нелинейных элементов, один из которых работает в качестве усилителя и ограничителя, а второй используется в режиме частотной модуляции для изменения частоты генерируемого высокочастотного сигнала и малый линейный участок модуляционной характеристики в силу малости линейного участка вольт-фарадной характеристики варикапа. Кроме того, не указывается, каким образом необходимо выбирать значения параметров обоих четырехполюсников, при которых наступает режим возбуждения и стационарный режим. Особенно остро возникает этот вопрос при проектировании устройств генерации и частотной модуляции в диапазонах ВЧ и УВЧ, на которых обязательно нужно учитывать реактивные составляющие параметров нелинейных элементов. В настоящее время классическая теория радиотехнических цепей это не учитывает. В режиме амплитудной и фазовой модуляции основным недостатком является изменение амплитуды и фазы высокочастотного сигнала по неконтролируемому закону, а надо изменять их по закону изменения амплитуды низкочастотного управляющего сигнала.
Таким образом, основным недостатком всех известных способов и устройств модуляции параметров высокочастотного сигнала является отсутствие возможности эффективного выполнения амплитудной, фазовой и частотной модуляции с помощью одного устройства по закону изменения амплитуды низкочастотного управляющего сигнала.
Техническим результатом изобретения является обеспечение амплитудной, фазовой и частотной модуляции с помощью одного устройства по закону изменения амплитуды низкочастотного управляющего сигнала с увеличенным линейным участком частотной модуляционной характеристики при использовании одного нелинейного элемента в режиме частотной модуляции и с заданными отношением модулей и разностью фаз передаточной функции в двух состояниях, характеризуемых двумя значениями амплитуды низкочастотного управляющего сигнала, в режиме амплитудной и фазовой модуляции, что позволяет создавать эффективные компактные устройства амплитудной, фазовой и частотной модуляции при использовании реактивного базиса с сосредоточенными параметрами.
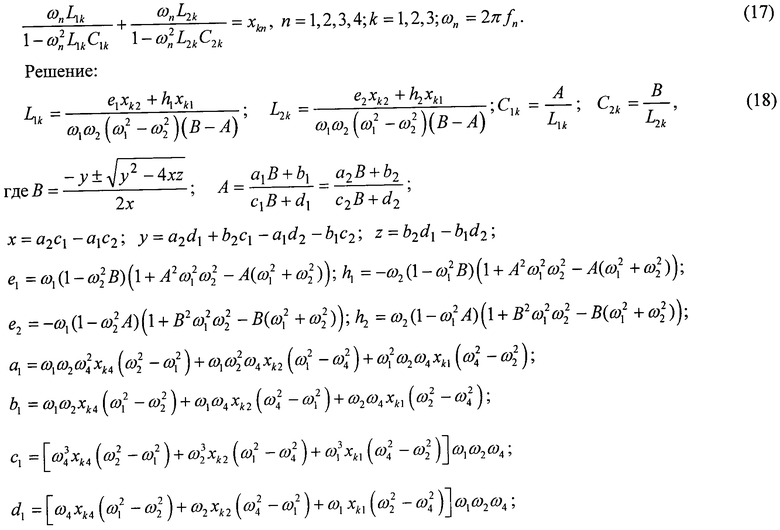
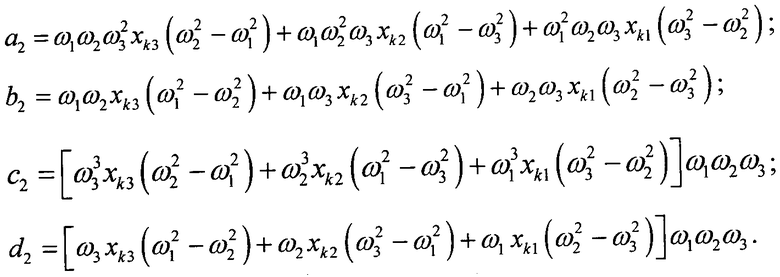
1. Указанный результат достигается тем, что в способе амплитудной, фазовой и частотной модуляции высокочастотного сигнала, основанном на взаимодействии высокочастотного и низкочастотного сигналов с многофункциональным устройством амплитудной, фазовой и частотной модуляции высокочастотного сигнала, выполненным из нелинейного элемента, согласующего четырехполюсника и нагрузки, причем в режиме частотной модуляции преобразуют энергию источника постоянного напряжения в энергию высокочастотного сигнала, организуют внутреннюю обратную связь в нелинейном элементе путем использования в качестве него двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, выполняют условия возбуждения стационарного режима генерации в виде баланса амплитуд и баланса фаз, определяющие соответственно амплитуду и частоту генерируемого высокочастотного сигнала, и условия согласования нелинейного элемента с нагрузкой с помощью согласующего четырехполюсника, изменяют частоту генерируемого высокочастотного сигнала путем изменения баланса фаз по закону изменения амплитуды низкочастотного управляющего сигнала, в режиме амплитудной и фазовой модуляции изменяют амплитуду и фазу входного высокочастотного сигнала под действием низкочастотного управляющего сигнала, дополнительно к входу четырехполюсника в поперечную цепь подключают комплексный двухполюсник, в режиме частотной модуляции изменяют частоту генерируемого высокочастотного сигнала и реализуют условия согласования за счет изменения сопротивления двухполюсного нелинейного элемента, включенного между четырехполюсником и нагрузкой в поперечную цепь, по закону изменения амплитуды низкочастотного управляющего сигнала, и обеспечения стационарного режима генерации в виде равенства нулю знаменателя коэффициента передачи на всем диапазоне изменения сопротивления двухполюсного нелинейного элемента от амплитуды низкочастотного управляющего сигнала и на заданном первом диапазоне изменения частоты генерируемого сигнала, в режиме амплитудной и фазовой модуляции изменяют амплитуду и фазу выходного высокочастотного сигнала по закону изменения амплитуды низкочастотного управляющего сигнала путем реализации заданных отношений модулей и разностей фаз передаточной функции многофункционального устройства в двух состояниях, определяемых двумя значениями амплитуды низкочастотного сигнала, на заданном втором диапазоне изменения частоты, за счет выбора оптимальных частотных характеристик параметров четырехполюсника из условия обеспечения физической реализуемости перечисленных операций в соответствии со следующими математическими выражениями

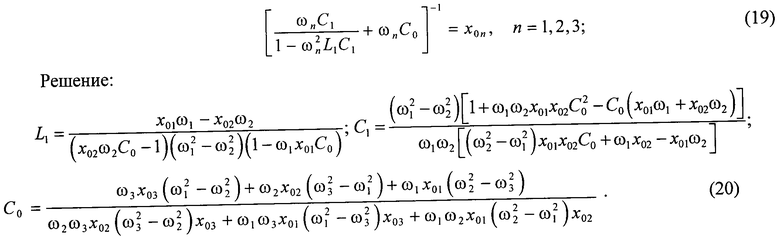
2. Указанный результат достигается тем, что в многофункциональном устройстве амплитудной, фазовой и частотной модуляции высокочастотного сигнала, состоящем из источника постоянного напряжения, двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, реактивного четырехполюсника, нагрузки и источника низкочастотного управляющего сигнала, дополнительно к входу реактивного четырехполюсника подключен комплексный двухполюсник, двухполюсный нелинейный элемент включен между выходом четырехполюсника и нагрузкой в поперечную цепь, источник низкочастотного управляющего сигнала подключен к двухполюсному нелинейному элементу, мнимая составляющая сопротивления источника высокочастотного сигнала реализована последовательным колебательным контуром с параметрами L1, C1, параллельно соединенным с емкостью C0, реактивный четырехполюсник выполнен в виде П-образного соединения трех двухполюсников, выполненных в виде двух последовательно соединенных параллельных контуров из элементов с параметрами L1k, C1k, L2k, C2k, значения указанных параметров определены в соответствии со следующими математическими выражениями:



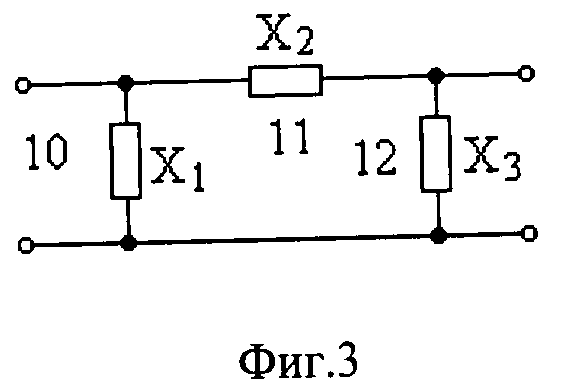
На фиг.3 приведена схема четырехполюсника в виде П-образного звена, входящего в предлагаемое устройство, схема которого представлена на фиг.2.
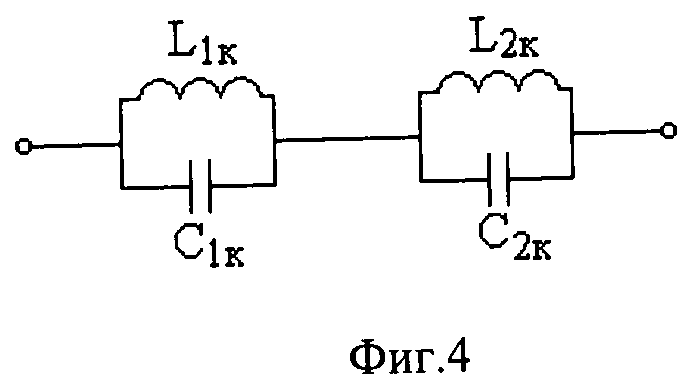
На фиг.4 приведена схема первого, второго и третьего реактивных двухполюсников, входящих в четырехполюсник, схема которого представлена на фиг.3.
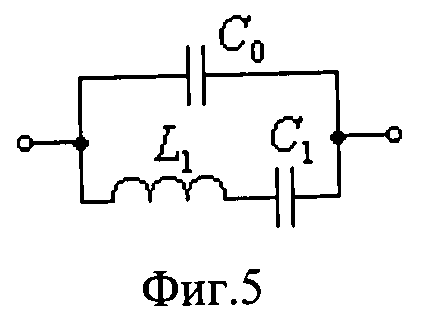
На фиг.5 приведена схема формирования двухполюсника, характеризующего мнимую составляющую сопротивления источника высокочастотного сигнала.
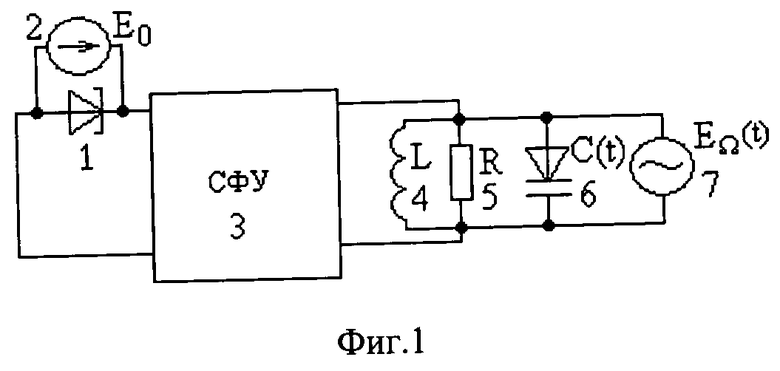
Устройство-прототип (Фиг.1), реализующее способ-прототип, содержит нелинейный элемент-1 с отрицательным дифференциальным сопротивлением, подключенный к источнику напряжения-2 с малым внутренним сопротивлением, согласующе-фильтрующее устройство-3 (реактивный четырехполюсник), нагрузку в виде колебательный контура на элементах L-4, R-5, C(t)-6. Управляемая емкость С(t), реализуемая варикапом-6, подключена к источнику низкочастотного управляющего (информационного) сигнала-7. Принцип действия устройства генерации и модуляции высокочастотных сигналов (прототипа), реализующего способ-прототип, состоит в следующем.
При включении источника постоянного напряжения-(2) в силу скачкообразного изменения амплитуды во всей цепи возникают колебания, спектр которых занимает весь частотный радиодиапазон. Амплитуды этих колебаний быстро затухают. Однако, благодаря наличию внутренней обратной связи, в двухполюсном нелинейном элементе, например туннельном диоде-1, на участке с падающей вольтамперной характеристикой возникает отрицательное дифференциальное сопротивление, которое в силу согласования с помощью реактивного четырехполюсника-3 компенсирует потери в контуре L-4, R-5, С(t)-6. Благодаря этому, колебание с частотой, равной резонансной частоте колебательного контура, усиливается до момента увеличения амплитуды этого колебания до уровня, при котором амплитуда выходит за пределы падающего участка вольтамперной характеристики. Наступает стационарный режим. В этом режиме изменение емкости варикапа C(t)-6 под действием управляющего сигнала источника-7 приводит к изменению частоты генерируемого сигнала по закону изменения амплитуды этого сигнала. Это режим частотной модуляции. В режиме амплитудной и фазовой модуляции в другом диапазоне изменения частоты амплитуда и фаза выходного высокочастотного сигнала изменяется под действием низкочастотного управляющего сигнала в общем случае по неконтролируемому закону.
Остальные недостатки способа-прототипа и устройства его реализации описаны выше.
Предлагаемое устройство по п.2 (фиг.2), реализующее предлагаемый способ по п.1, содержит нелинейный элемент-1 с отрицательным дифференциальным сопротивлением zn=rn+jxn на заданной несущей частоте, подключенный к источнику низкочастотного управляющего напряжения с постоянной составляющей-9 с малым внутренним сопротивлением и включенный по высокой частоте в поперечную цепь между выходом четырехполюсника (согласующе-фильтрующего устройства (СФУ))-3 и нагрузкой-10 с сопротивлением zнn=rнn+jxнn на заданной несущей частоте. Четырехполюсник-3 выполнен в виде П-образного соединения трех двухполюсников (Фиг.3) с сопротивлениями x1n - 11, x2n - 12, x3n - 11. К входу четырехполюсника-3 подключен комплексный двухполюсник-8 с сопротивлением z0n=r0n+jx0n на заданной несущей частоте, имитирующим в режиме частотной модуляции сопротивление источника высокочастотных колебаний (при анализе и синтезе вместо источника высокочастотного сигнала необходимо учитывать короткозамыкающую перемычку), возникающих при включении источника низкочастотного управляющего напряжения с постоянной составляющей-9 в момент скачкообразного изменения амплитуды его напряжения и сопротивление источника входного высокочастотного сигнала в режиме амплитудной и фазовой модуляции. Мнимая составляющая сопротивления источника высокочастотных колебаний сформирована двухполюсником из последовательного колебательного контура, параллельно соединенного с емкостью. Синтез этого двухполюсника осуществлен по критерию обеспечения всех режимов с помощью одного устройства (см. ниже). Синтез четырехполюсника (выбор значений сопротивлений-11, 12. 13 первого, второго и третьего двухполюсников П-образного соединения (Фиг.3) на четырех заданных частотах (n=1, 2, 3, 4 - номер частоты) и схемы формирования этих двухполюсников из последовательно соединенных двух параллельных контуров (Фиг.4) и значений параметров контуров) осуществлен по критерию обеспечения баланса амплитуд и баланса фаз путем реализации равенства нулю знаменателя коэффициента передачи устройства многофункционального устройства в режиме частотной демодуляции на первых трех из четырех частотах заданного диапазона изменения частоты генерируемого сигнала и трех значениях амплитуды низкочастотного управляющего сигнала соответственно и по критерию обеспечения заданных отношений модулей и разностей фаз передаточной функции на четвертой (несущей) частоте входного высокочастотного гармонического сигнала и двух значениях амплитуды низкочастотного управляющего сигнала в режиме амплитудной и фазовой модуляции.
Предлагаемое устройство функционирует следующим образом. В режиме частотной модуляции при включении источника низкочастотного управляющего напряжения с постоянной составляющей-9 в силу скачкообразного изменения амплитуды во всей цепи возникают колебания, спектр которых занимает весь частотный радиодиапазон. Амплитуды этих колебаний быстро затухают. Однако, благодаря наличию внутренней обратной связи, в двухполюсном нелинейном элементе, например туннельном диоде-1, на участке с падающей вольтамперной характеристикой возникает отрицательное дифференциальное сопротивление, которое в силу синтеза четырехполюсника-3 по заданному критерию компенсирует потери во всей цепи. Амплитуда колебания с заданной частотой усиливается до определенного уровня и затем ограничивается. Синтез четырехполюсника-3 осуществлен по критерию совпадения реальных частотных зависимостей сопротивлений первого-11 и второго-12 двухполюсников на четырех частотах с оптимальными характеристиками, обеспечивающими изменение частоты генерируемого сигнала по закону, соответствующему закону изменения амплитуды переменной составляющей сигнала (низкочастотного управляющего сигнала) источника-9. Благодаря этому, колебание с заданной несущей частотой усиливается до момента увеличения амплитуды этого колебания до уровня, при котором амплитуда выходит за пределы падающего участка вольтамперной характеристики. Наступает стационарный режим. В этом режиме изменение действительной и мнимой составляющих сопротивления нелинейного элемента-1 под действием переменной составляющей сигнала источника-9. приводит к изменению частоты генерируемого сигнала по закону изменения амплитуды этого сигнала. Источник-9 может быть заменен двумя источниками- источником постоянного напряжения и источником низкочастотного управляющего сигнала. В режиме амплитудной и фазовой модуляции обеспечены заданные отношения модулей и разностей фаз передаточной функции на двух значениях амплитуды низкочастотного управляющего сигнала и на несущей частоте входного высокочастотного гармонического сигнала. Непрерывное изменение амплитуды низкочастотного управляющего сигнала от одного состояния до другого обеспечивает модуляцию амплитуды и фазы выходного высокочастотного гармонического сигнала по закону изменения амплитуды низкочастотного управляющего сигнала на несущей частоте.
Докажем возможность реализации указанных свойств.
Пусть в режиме частотной модуляции известны зависимости сопротивления воображаемого источника сигнала Z0=r0+jx0, нагрузки Zн=rн+jxн, и проводимости нелинейного элемента y=g+jb от частоты. Кроме того, известны зависимости действительной и мнимой составляющих проводимости нелинейного элемента от амплитуды управляющего низкочастотного сигнала. Таким образом, каждому заданному значению амплитуды низкочастотного сигнала соответствует определенное значение действительной и мнимой составляющих проводимости нелинейного элемента на заданной частоте. Для простоты записи аргументы ω=2πf (круговая частота) и U, I (напряжение или ток амплитуды низкочастотного сигнала) опущены.
Нелинейный элемент характеризуется следующей матрицей передачи:

С учетом условия взаимности (x12=-x21) СФУ может характеризоваться матрицей сопротивления

и соответствующей классической матрицей передачи:

где 
Умножим матрицу передачи реактивного четырехполюсника на матрицу передачи нелинейного элемента. С учетом Z0, Zн [:Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971. с.34-36] получим выражение для нормированной классической матрицы передачи устройства генерации и частотной демодуляции:

Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния с учетом (4) получим выражение для коэффициента передачи многофункционального устройства в режиме усиления (первый этап генерации):

Физически реализуемая передаточная функция связана с коэффициентом передачи простым соотношением: 
Условие обеспечения стационарного режима генерации (условие баланса амплитуд и баланса фаз) соответствует равенству нулю знаменателя коэффициента передачи (5). После разделения комплексного уравнения, сформированного из этого равенства, на действительную и мнимую части, получим систему двух уравнений:

где A=1+rнg-xнb; B=rнb+xнg.
Решение системы (6) имеет вид взаимосвязей между элементами матрицы сопротивлений четырехполюсника:

где 
На основе использования известных соотношений между элементами матрицы сопротивлений и элементами классической матрицы передачи в интересах дальнейших рассуждений запишем взаимосвязи (7) в терминах элементов классической матрицы передачи:

где 


Полученные взаимосвязи (8) с учетом заданных частотных зависимостей r0, x0, rн, xн, r, x являются оптимальными аппроксимирующими функциями частотных зависимостей соответствующих отношений элементов классической матрицы передачи СФУ по критерию обеспечения частотной модуляции.
Пусть в режиме амплитудной и фазовой модуляции известны зависимости сопротивления источника высокочастотного гармонического сигнала z0a=r0a+jx0a, нагрузки zнa=rнa+jxнa и проводимости управляемого нелинейного элемента y1,2=g1,2+jb1,2 в двух состояниях, определяемых двумя уровнями управляющего воздействия, от частоты. Полоса частот в этом режиме отличается от полосы частот в режиме частотной модуляции.
Требуется определить частотные характеристики параметров СФУ и двухполюсников, формирующих четырехполюсник, минимальное количество элементов и значения параметров схемы согласуще-фильтрующего устройства (СФУ) на реактивных элементах, при которых переключение управляемого элемента из одного состояния в другое однозначно приводило бы к изменению модуля и фазы коэффициента передачи по следующему закону:

гдe 



С учетом условия взаимности (x12-x21) СФУ может характеризоваться матрицей сопротивления (2) и соответствующей классической матрицей передачи (3).
Управляемый элемент в первом и втором состояниях характеризуется следующей матрицей передачи:

Умножим матрицы (3) и (10). С учетом Z0, Zн найдем нормированную матрицу передачи всего устройства:

Следовательно, выражение для коэффициента передачи многофункционального устройства в режиме амплитудной и фазовой модуляции в двух состояниях будут иметь вид:

Для получения взаимосвязей между элементами матрицы сопротивлений (2), оптимальных по критерию обеспечения требуемого закона изменения амплитуды и фазы проходного сигнала, подставим (12) в (9). После разделения комплексного уравнения на действительную и мнимую части, получим систему двух уравнений, решение которой имеет вид взаимосвязей между элементами матрицы сопротивлений:

где 


B1=1+g2rн-b2xн-m21cosφ21(1+g1rн-b1xн)+m21sinφ21(g1xн+b1rн).
На основе использования известных соотношений между элементами матрицы сопротивлений и элементами классической матрицы передачи в интересах дальнейших рассуждений запишем взаимосвязи (13) в терминах элементов классической матрицы передачи (порядок получающихся уравнений при этом уменьшается):

Взаимосвязи (14) являются также оптимальными по критерию (9) аппроксимирующими функциями частотных зависимостей этих элементов.
Для того, чтобы одно и тоже устройство выполняло функции амплитудного, фазового и частотного модулятора, достаточно, чтобы оптимальные взаимосвязи (8) и (14) были попарно равны (решения, полученные для режима частотной модуляции и для режима амплитудной и фазовой модуляции, сшиваются). Из этих равенств и условия физической реализуемости (условия взаимности (α+βγ)d2=1) следуют ограничения на частотные характеристики еще двух элементов классической матрицы передачи и мнимой составляющей сопротивления источника сигнала:

Взаимосвязи (8), (15) или (14), (15) кроме того, означают, что для реализации аппроксимирующих функций частотных зависимостей параметров четырехполюсника необходимо, чтобы СФУ содержало не менее трех независимых двухполюсников, частотные зависимости сопротивлений которых должны быть определены из решения систем трех уравнений, сформированных на основе взаимосвязей (8), (15) или (14), (15). Для этого необходимо взять пробную типовую схему СФУ, найти матрицу передачи этой схемы и найденные таким образом элементы α, β, γ (элемент d в силу условия взаимности является зависимым), выраженные через параметры схемы, подставить в (8), (15) или (14), (15) и решить сформированную систему трех уравнений относительно сопротивлений выбранных трех двухполюсников. Частотные характеристики остальных параметров r0, rн, xн, r, x, r0a, x0a, rнa, xнa, g1.2, b1,2 и оставшихся двухполюсников СФУ (если число двухполюсников больше трех) могут быть выбраны произвольно или исходя из каких-либо других физических соображений.
В соответствии с изложенным алгоритмом получены выражения для отыскания оптимальных аппроксимаций частотных зависимостей сопротивлений первого, второго и третьего двухполюсников СФУ в виде П-образного соединения трех реактивных двухполюсников:

где n=1, 2… - номера частот интерполяции. Подкоренное выражение в (16) всегда положительно, Индекс n необходимо ввести и в остальные заданные и расчетные величины
r0n, rнn, xнn, rn, xn, r0an, x0an, rнan, xнan, r1n.2n, x1n,2n, x0n и другие.
Для обеспечения совпадения оптимальных частотных зависимостей сопротивлений двухполюсников (16) с реальными частотными характеристиками необходимо сформировать двухполюсники с сопротивлениями x1n, x2n, x3n из не менее, чем N (числа частот интерполяции) реактивных элементов, найти выражения для их сопротивлений, приравнять их оптимальным значениям сопротивлений двухполюсников на заданных частотах, определенным по формулам (16) и решить сформированную таким образом систему N уравнений относительно N выбранных параметров реактивных элементов. Это метод интерполяции. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например, из условия физической реализуемости. Пусть каждый из двухполюсников с сопротивлениями x1n, x2n, x3n сформирован из двух последовательно соединенных параллельных контуров L1k, C1k, L2k, C2k (k=1, 2, 3 - номер двухполюсника (фиг.4)). Для N=4 составим три системы четырех уравнений:
Аналогичную задачу необходимо решить относительно обеспечения совпадения оптимальной частотной зависимости (15) мнимой составляющей x0 сопротивления комплексного двухполюсника (сопротивления источника сигнала) с реальными частотными характеристиками на трех частотах в режиме частотной модуляции. Пусть двухполюсник с мнимой составляющей x0 сопротивления сформирован из последовательного колебательного контура с параметрами L1, C1, параллельно соединенного с емкостью C0 (фиг.5). Составим систему трех уравнений:
На четвертой частоте мнимая составляющая сопротивления источника сигнала в режиме амплитудной и фазовой модуляции может принимать произвольное значение x0a.
Реализация оптимальных аппроксимаций частотных характеристик двухполюсников четырехполюсника в виде П-образного звена (16) с помощью (18) и оптимальных аппроксимаций частотных характеристик x0 (15) с помощью (20) обеспечивает увеличение диапазона изменения частоты генерируемого сигнала, поскольку реализует условие баланса амплитуд и баланса фаз на трех частотах заданной модуляционной характеристики или заданного диапазона изменения частоты в режиме частотной модуляции. Это позволяет при разумном выборе положений трех первых заданных частот относительно друг друга расширить линейный участок модуляционной характеристики. В режиме амплитудной и фазовой модуляции будут реализованы заданные отношения модулей и разности фаз передаточной функции в двух состояниях, определяемых двумя значениями амплитуды низкочастотного управляющего сигнала, на несущей частоте высокочастотного гармонического сигнала. При разумном выборе двух значений амплитуды низкочастотного управляющего сигнала и при непрерывном изменении амплитуды низкочастотного управляющего сигнала от первого значения до второго будет реализован режим амплитудной и фазовой модуляции по закону изменения амплитуды низкочастотного управляющего сигнала на несущей частоте.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника реактивным в виде указанным выше способом соединенных между собой трех двухполюсников, формирования первого, второго и третьего двухполюсников из последовательно соединенных двух параллельных контуров, выбора значений их параметров из условия обеспечения стационарного режима генерации на трех заданных частотах при изменении состояния нелинейного двухполюсного элемента с отрицательным дифференциальным сопротивлением, включенного между выходом реактивного четырехполюсника и нагрузкой в поперечную цепь, подключения комплексного двухполюсника к входу реактивного четырехполюсника, формирования двухполюсника, характеризующего мнимую составляющую сопротивления комплексного двухполюсника, из последовательного колебательного контура, параллельно соединенного с емкостью), обеспечивает модуляцию частоты генерируемого сигнала по закону изменения амплитуды низкочастотного сигнала в режиме частотной модуляции, а также реализует заданное отношение модулей и заданную разность фаз передаточной функции в двух состояниях, определяемых двумя значениями амплитуды низкочастотного управляющего сигнала, и модуляцию амплитуды и фазы высокочастотного сигнала на четвертой частоте по закону изменения амплитуды низкочастотного управляющего сигнала при непрерывном ее изменении от первого значения до второго.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью активные полупроводниковые диоды (диоды Ганна, туннельные диоды, лавинно-пролетные диоды и т.д.), индуктивности и емкости, сформированные в заявленную схему реактивного четырехполюсника. Значения параметров индуктивностей и емкостей колебательных контуров могут быть однозначно определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенных способа и устройства заключается в обеспечении частотной модуляции высокочастотного сигнала в одной полосе частот и амплитудной и фазовой модуляции в другой полосе частот по закону изменения амплитуды низкочастотного сигнала с помощью одного устройства за счет оптимизации значений параметров реактивных элементов по критерию обеспечения перечисленных функций, что уменьшает номенклатуру радиоустройств и унифицирует их в интересах производства.
Изобретения относятся к областям радиосвязи, радиолокации, радионавигации и радиоэлектронной борьбы и могут быть использованы для обеспечения амплитудной, фазовой и частотной модуляции.
Технический результат изобретения заключается в обеспечении амплитудной, фазовой и частотной модуляции по закону изменения амплитуды низкочастотного управляющего сигнала с увеличенным линейным участком частотной модуляционной характеристики при использовании одного нелинейного элемента в режиме частотной модуляции и с заданным отношением модулей и разностью фаз передаточной функции в двух состояниях, характеризуемых двумя значениями амплитуды низкочастотного управляющего сигнала, в режиме амплитудной и фазовой модуляции, что позволяет создавать эффективные компактные устройства амплитудной, фазовой и частотной модуляции при использовании реактивного базиса с сосредоточенными параметрами. 2 н.п. ф-лы, 5 ил.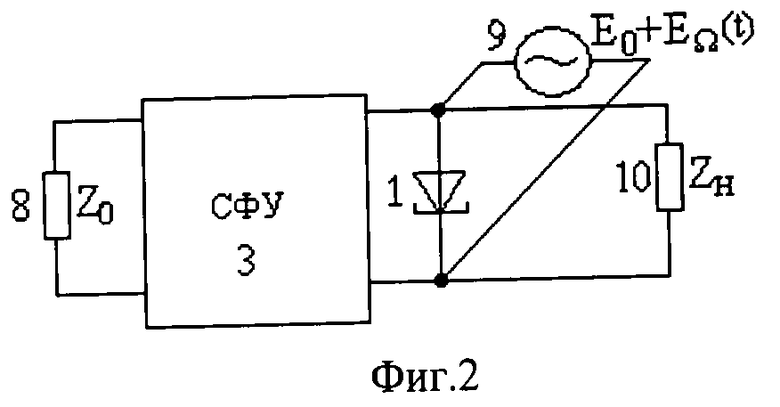
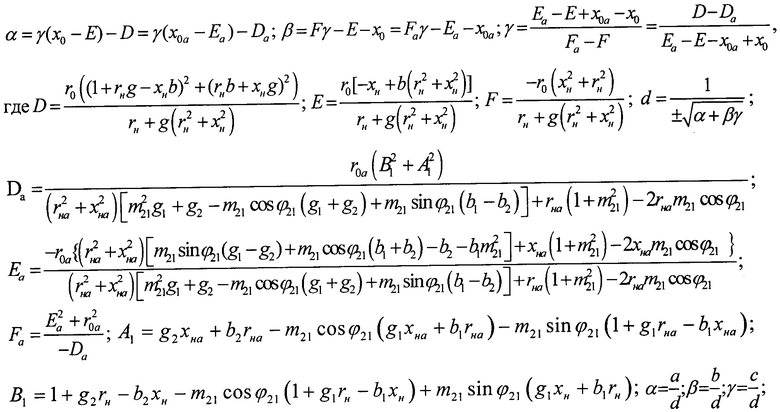
1. Способ амплитудной, фазовой и частотной модуляции высокочастотного сигнала, основанный на взаимодействии высокочастотного и низкочастотного сигналов с многофункциональным устройством амплитудной, фазовой и частотной модуляции высокочастотного сигнала, выполненным из нелинейного элемента, согласующего четырехполюсника и нагрузки, причем в режиме частотной модуляции преобразуют энергию источника постоянного напряжения в энергию высокочастотного сигнала, организуют внутреннюю обратную связь в нелинейном элементе путем использования в качестве него двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, выполняют условия возбуждения стационарного режима генерации в виде баланса амплитуд и баланса фаз, определяющие соответственно амплитуду и частоту генерируемого высокочастотного сигнала, и условия согласования нелинейного элемента с нагрузкой с помощью согласующего четырехполюсника, изменяют частоту генерируемого высокочастотного сигнала путем изменения баланса фаз по закону изменения амплитуды низкочастотного управляющего сигнала, в режиме амплитудной и фазовой модуляции изменяют амплитуду и фазу входного высокочастотного сигнала под действием низкочастотного управляющего сигнала, отличающийся тем, что к входу четырехполюсника в поперечную цепь подключают комплексный двухполюсник, в режиме частотной модуляции изменяют частоту генерируемого высокочастотного сигнала и реализуют условия согласования за счет изменения сопротивления двухполюсного нелинейного элемента, включенного между четырехполюсником и нагрузкой в поперечную цепь, по закону изменения амплитуды низкочастотного управляющего сигнала, и обеспечения стационарного режима генерации в виде равенства нулю знаменателя коэффициента передачи на всем диапазоне изменения сопротивления двухполюсного нелинейного элемента от амплитуды низкочастотного управляющего сигнала и на заданном первом диапазоне изменения частоты генерируемого сигнала, в режиме амплитудной и фазовой модуляции изменяют амплитуду и фазу выходного высокочастотного сигнала по закону изменения амплитуды низкочастотного управляющего сигнала путем реализации заданных отношений модулей и разностей фаз передаточной функции многофункционального устройства в двух состояниях, определяемых двумя значениями амплитуды низкочастотного сигнала, на заданном втором диапазоне изменения частоты за счет выбора оптимальных частотных характеристик параметров четырехполюсника из условия обеспечения физической реализуемости перечисленных операций в соответствии со следующими математическими выражениями
α=γ(x0-E)-D=γ(x0a-Ea)-Da; β=Fγ-E-x0=Faγ-Ea-x0a; 
где 



B1=1+g2rн-b2xн-m21cosφ21(1+g1rн-b1xн)+m21sinφ21(g1xн+b1rн); 



2. Многофункциональное устройство амплитудной, фазовой и частотной модуляции высокочастотного сигнала, состоящее из источника постоянного напряжения, двухполюсного нелинейного элемента с отрицательным дифференциальным сопротивлением, реактивного четырехполюсника, нагрузки и источника низкочастотного управляющего сигнала, отличающееся тем, что к входу реактивного четырехполюсника подключен комплексный двухполюсник, двухполюсный нелинейный элемент включен между выходом четырехполюсника и нагрузкой в поперечную цепь, источник низкочастотного управляющего сигнала подключен к двухполюсному нелинейному элементу, мнимая составляющая сопротивления источника высокочастотного сигнала реализована последовательным колебательным контуром с параметрами L1, C1, параллельно соединенным с емкостью С0, реактивный четырехполюсник выполнен в виде П-образного соединения трех двухполюсников, выполненных в виде двух последовательно соединенных параллельных контуров из элементов с параметрами L1k, C1k, L2k, С2k, значения указанных параметров определены в соответствии со следующими математическими выражениями




где 
x=a
2c1-a
1c2; y=a
2d1+b2c1-a
1d2-b1c2; z=b2d1-b1d2;













β=Fγ-E-x0n=Faγ-Ea-x0an; 








A1=g2nxнan+b2nrнan-m21ncosφ21n(g1nxнan+b1nrнan)-m21nsinφ21n(1+g1nrнan-b1nxнan);
B1=1+g2nrнn-b2nxнn-m21ncosφ21n(1+g1nrнn-b1nxнn)+m21nsinφ21n(g1nxнn+b1nrнn);
| Гоноровский И.С | |||
| Радиотехнические цепи и сигналы: учеб.пособие для вузов / Гоноровский И.С., 5-е изд., испр | |||
| - М.: Дрофа, 2006, 719 с | |||
| СПОСОБ МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2354040C1 |
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342769C2 |
| US 5155455 A, 13.10.1992. | |||

